Изобретение относится к руке, предназначенной для оснащения робота-гуманоида. В частности, оно относится к руке, пальцы которой можно перемещать из положения покоя в два разных положения при помощи единого привода.
Изобретение относится к руке, предназначенной для оснащения робота-гуманоида.
Человеческая рука является исключительно сложной частью человеческого тела. Она содержит несколько пальцев, сочлененных через суставы вокруг ладони руки. Кроме того, каждый палец содержит несколько фаланг, сочлененных между собой суставами. Каждый сустав является подвижным благодаря мышцам. Различные суставы руки обеспечивают, в частности, удержание предметов разной формы. Относительное положение пальцев и ладони позволяет также показывать знаки или символы, позволяющие передать сообщение, например, вытянутый указательный палец указывает на предмет или на направление, вытянутый большой палец показывает одобрение, и т.д. Таким образом, контроль движений пальцев руки представляет особый интерес для усиления гуманоидного характера робота и его способности к интерактивному общению. Трудность заключается в большим числе приводов, необходимых для обеспечения независимого контроля движений пальцев.
Представляется мало реалистичным управлять независимо движением каждой из фаланг каждого из пальцев руки как для удержания предмета, так и для передачи визуального сообщения. На практике стараются обеспечить максимальное число возможностей движения при минимальном количестве приводов. Как известно, механизм называют малоприводным, когда число управляемых приводов А меньше числа степеней свободны N, то есть когда N>A. При этом степень малоприводности определяют как разность (N-A). Известна, например, малоприводная рука, в которой четыре пальца с тремя фалангами и один палец с двумя фалангами можно сгибать при помощи единого привода. Рука, позволяющая управлять четырнадцатью степенями свободы через четырнадцать поворотных связей при помощи единственного привода, имеет высокую степень малоприводности.
Были сделаны попытки улучшить способность контроля руки, сохраняя высокую степень малоприводности. Например, известно применение педального рычага, расположенного между приводом и пальцами, чтобы распределять усилие удержания на каждый из пальцев. Таким образом, при помощи единственного привода рука может удерживать предметы разной формы. Однако рукой можно управлять только между открытым положением и сомкнутым положением; при этом соответствующее положение каждого из пальцев в сомкнутом положении зависит от формы удерживаемого предмета. Если между пальцами нет никакого предмета, они смыкаются в положении, характеризующем сомкнутую точку.
Для усиления гуманоидного характера робота и его способностей к интерактивному общению следует увеличить возможности контроля руки и одновременно сохранить высокую степень малоприводности. Разумеется, решение должно вписываться в конструктивную и функциональную среду робота.
В связи с этим объектом изобретения является рука, предназначенная для оснащения робота-гуманоида, при этом рука содержит ладонь и несколько пальцев, при этом каждый из пальцев можно перемещать относительно ладони между положением покоя, удерживаемым за счет пружинного эффекта, и сжатым положением, получаемым за счет приведения в действие соединительной детали между упомянутым пальцем и ладонью с преодолением пружинного эффекта. Рука дополнительно содержит механизированный вал, соединенный с соединительной деталью каждого из пальцев и выполненный таким образом, чтобы перемещать соответственно по меньшей мере первый палец и по меньшей мере второй палец из положения покоя в сжатое положение за счет вращения механизированного вала соответственно в первом направлении вращения и в противоположном направлении.
Предпочтительно вал содержит первый и второй радиальные профили соответственно на первом и втором участках своей окружности, выполненные с возможностью приведения в движение соединительной детали пальца во время вращения вала соответственно в первом направлении и в противоположном направлении вращения.
Предпочтительно один из пальцев перемещают путем вращения вала только в одном из двух направлений вращения.
Предпочтительно в положении покоя пальцы образуют вместе с ладонью раскрытую руку.
Предпочтительно два из пальцев установлены в ладони таким образом, что похожи соответственно на большой палец и на указательный палец, при этом большой палец или указательный палец удерживаются в положении покоя во время вращения вала в первом направлении, при этом вращение вала в противоположном направлении перемещает все пальцы руки в сжатое положение, образуя вместе с ладонью сомкнутую руку.
Предпочтительно соединительная деталь одного из пальцев содержит тросик, соединенный с одной стороны с пальцем и с другой стороны с валом при помощи наконечника, установленного в полости вала; при этом тросик проходит в радиальном направлении через вал по каналу, соединяющему полость и конец одного из радиальных профилей, таким образом, чтобы вращение вала в одном направлении способствовало наматыванию тросика на упомянутый радиальный профиль, что приводит к перемещению пальца за счет натяжения тросика.
Предпочтительно радиальный профиль одного из пальцев является по существу кольцевым на участке окружности, близком к полуокружности с центром на оси вращения вала, и на него может наматываться тросик упомянутого пальца; при этом диаметр радиального профиля определяет ход тросика и амплитуду перемещения пальца между положением покоя и сжатым положением.
Предпочтительно соединительная деталь одного из пальцев содержит наконечник, установленный с возможностью свободного вращения в полости, центрованной по оси вращения вала; при этом канал выполнен таким образом, что позволяет тросику проходить через вал в радиальном направлении вдоль всего радиального профиля, чтобы удерживать палец в положении покоя во время вращения вала.
Предпочтительно вал имеет несколько первых и вторых радиальных профилей, расположенных последовательно вдоль оси вращения вала, для одновременного перемещения нескольких пальцев.
Предпочтительно рука содержит два идентичных пальца, соединенных с валом двумя тросиками одинаковой длины и двумя одинаковыми наконечниками. Вал содержит две приемные полости, выполненные в валу на разных расстояниях от оси вращения вала, позволяющие установить два пальца в ладони руки на двух разных расстояниях от оси вращения вала.
Предпочтительно соединительная деталь одного из пальцев является жесткой, и вал содержит первый и второй кулачки; при этом соединительную деталь перемещают соответственно при помощи первого и второго кулачков за счет вращения вала соответственно в первом направлении и в противоположном направлении.
Объектом изобретения является также робот-гуманоид, оснащенный рукой, имеющей вышеупомянутые признаки.
Изобретение и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
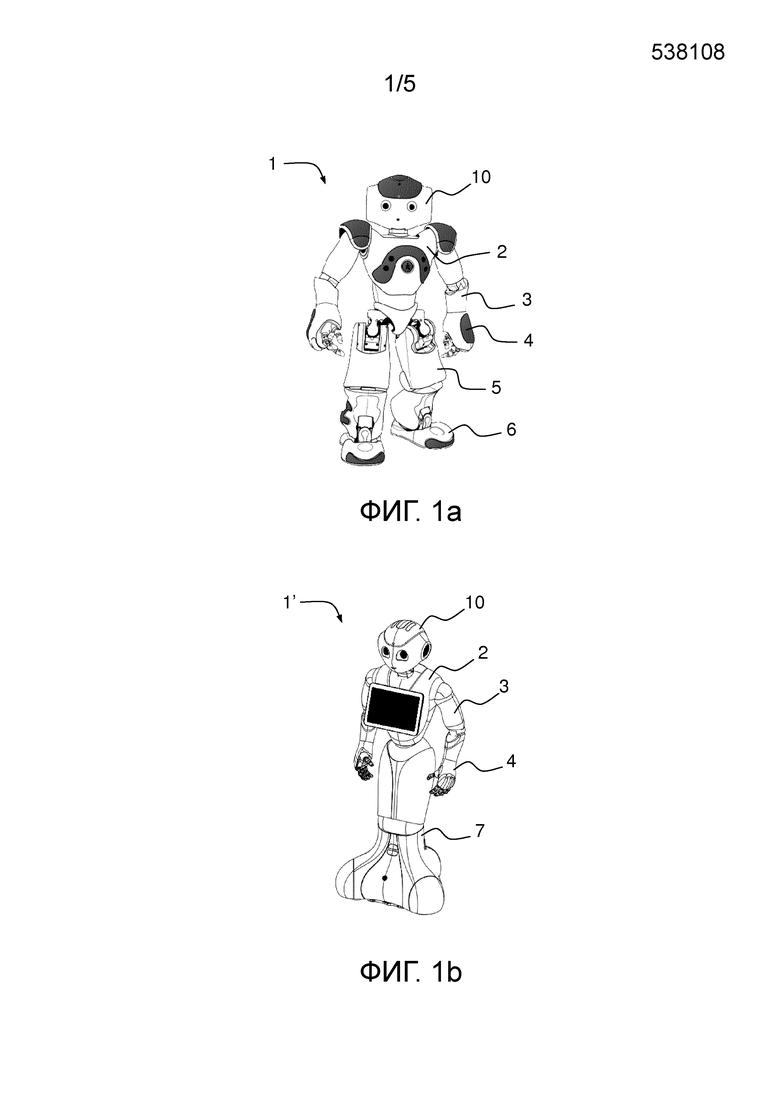
Фиг. 1а и 1b - два примера роботов-гуманоидов, которые можно оснастить двумя руками в соответствии с изобретением.
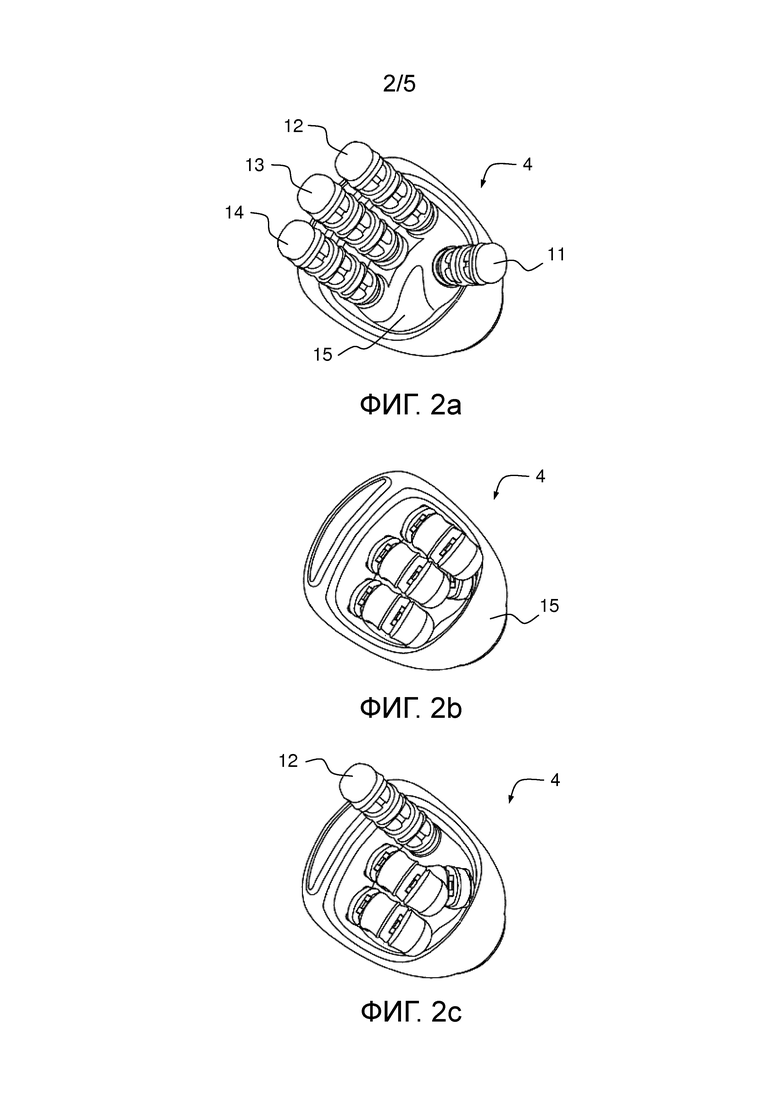
Фиг. 2а, 2b и 2с - пример руки робота-гуманоида, содержащей ладонь и пальцы, расположенные таким образом, чтобы образовать руку в конфигурации «открытой руки», «сомкнутой руки» и «вытянутого указательного пальца».
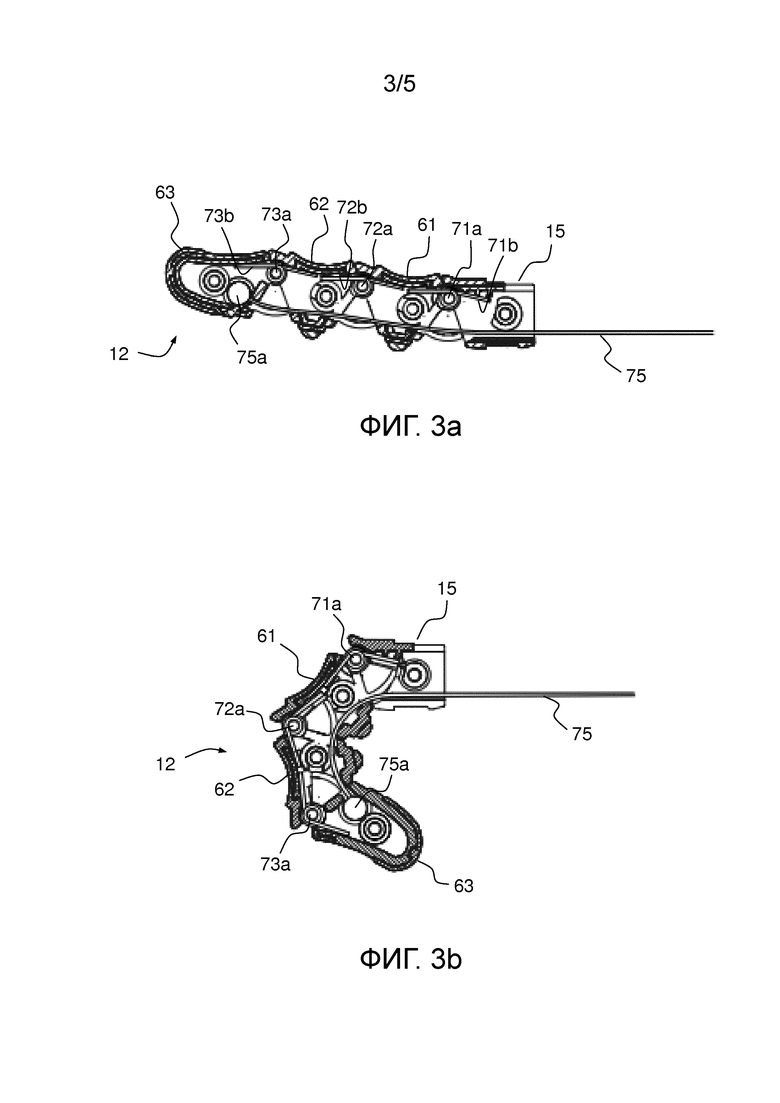
Фиг. 3а и 3b - пример пальца робота-гуманоида, состоящего из нескольких фаланг, соответственно в положении «вытянутого пальца» и «согнутого пальца».
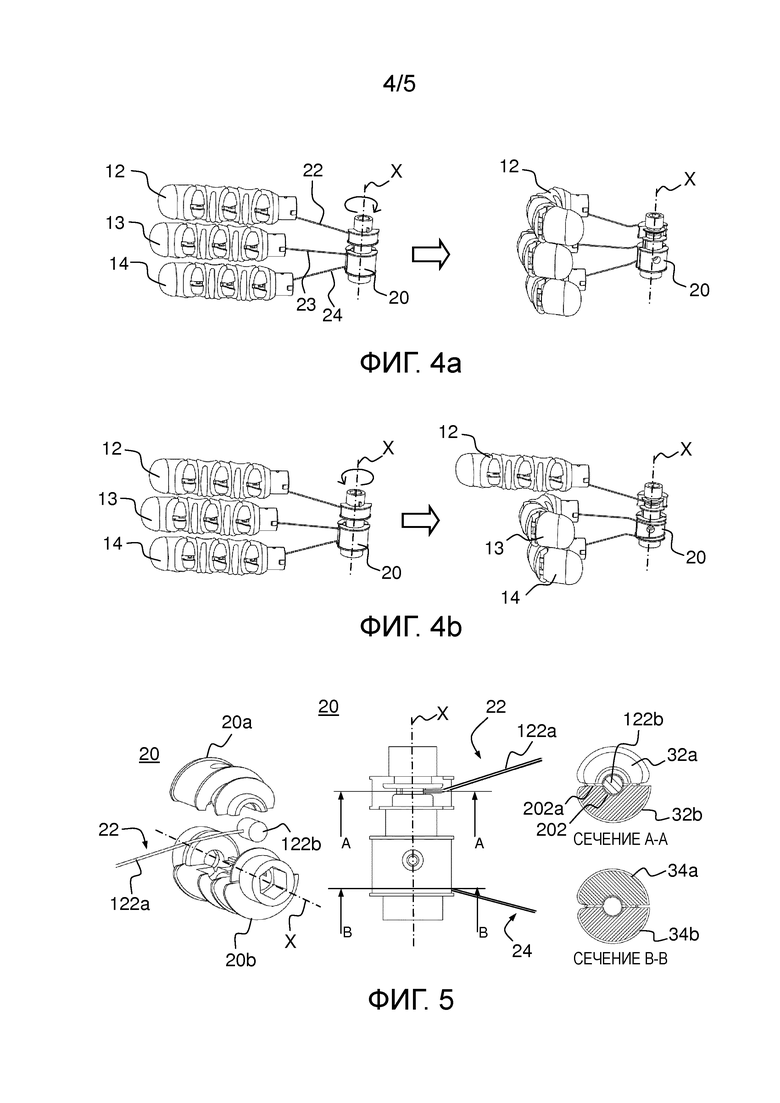
Фиг. 4а и 4b иллюстрируют принцип изобретения для перемещения пальцев руки из конфигурации «открытой руки» соответственно в конфигурацию «сомкнутой руки» и в конфигурацию «вытянутого пальца».
Фиг. 5 - механизированный вал и соединительные детали, применяемые в руке робота-гуманоида в соответствии с изобретением.
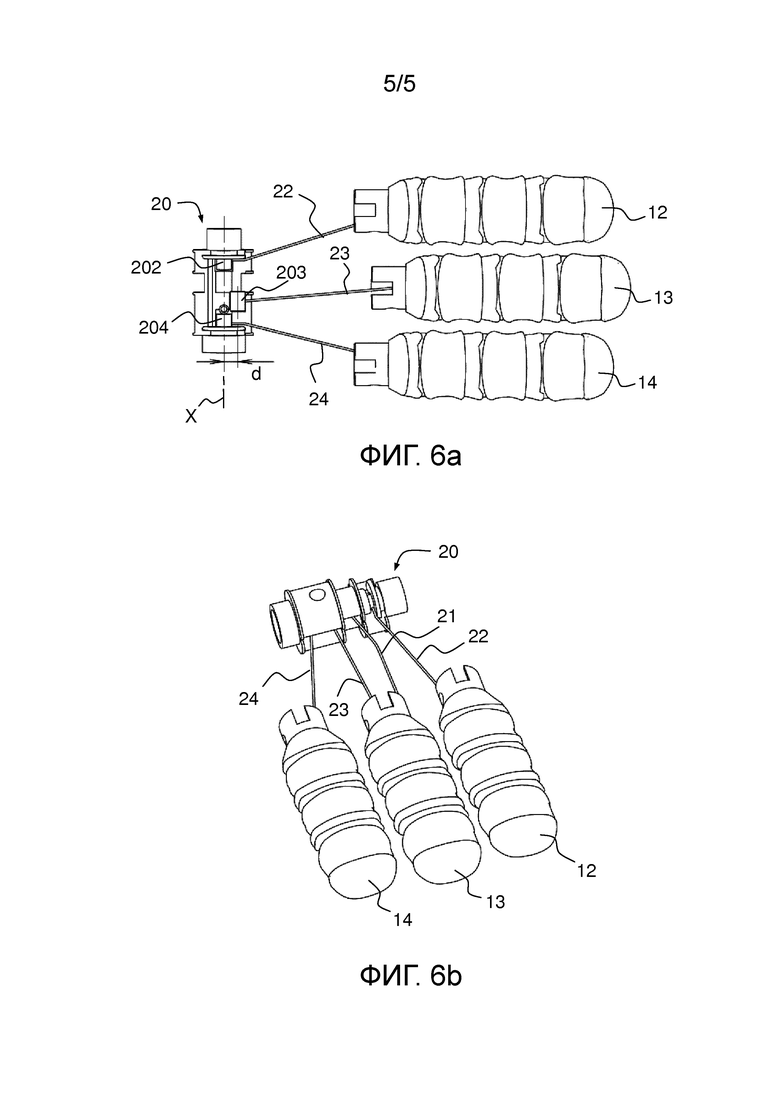
Фиг. 6а и 6b - два вида механизированного вала и соединительных деталей между валом и тремя пальцами руки робота.
Для большей ясности одни и те же элементы на разных фигурах имеют одинаковые обозначения.
На фиг. 1а и 1b представлены два примера роботов-гуманоидов, разработанных компанией ALDEBARAN ROBOTICSTM. Показанный на фиг. 1а робот-гуманоид содержит голову 10, туловище 2, два предплечья 3, две руки 4, две ноги 5 и две ступни 6. Робот-гуманоид 1', показанный на фиг. 1b, содержит голову 10, туловище 2, два предплечья 3, две руки 4 и юбку 7. Изобретение относится к руке, которой можно оснастить роботы-гуманоиды этих типов.
В дальнейшем изобретение будет описано для частного случая руки, содержащей четыре пальца, установленные в ладони. Три пальца, состоящие из трех фаланг, подобны указательному пальцу, среднему пальцу и безымянному пальцу. Четвертый палец, состоящий из двух фаланг, выполнен наподобие большого пальца. Разумеется, изобретение не ограничивается этим частным примером, и рука может содержать ладонь и несколько механизированных пальцев, позволяющая наподобие человеческой руки перемещать пальцы относительно ладони. Кроме того, изобретение относится к руке, позволяющей усилить сходство робота с человеком, например, обеспечивающей улучшенное визуальное общение. Разумеется, изобретение можно применять в соответствии с тем же принципом и с теми же преимуществами для других органов, например, ступни робота-гуманоида или лапы робота в виде животного.
На фиг. 2а, 2b и 2с представлен пример руки робота-гуманоида в соответствии с изобретением, содержащей ладонь и пальцы, расположенные таким образом, чтобы соответствовать руке в конфигурации «открытая рука», «сомкнутая рука» и «вытянутый указательный палец». В примере, показанном на фигурах, рука содержит ладонь 15, три пальца 12, 13 и 14, состоящие из трех фаланг, и один палец 11, состоящий из двух фаланг. По своей форме и расположению в ладони пальцы 11, 12, 13 и 14 образуют соответственно большой палец, указательный палец, средний палец и безымянный палец руки 4. На фиг. 2а показана рука в конфигурации «открытая рука», на фиг. 2b - в конфигурации «сомкнутая рука» и на фиг. 2с - в конфигурации «вытянутый указательный палец».
На фиг. 3а и 3b показан пример пальца робота-гуманоида, состоящего из нескольких фаланг, соответственно в конфигурации «вытянутый палец» и «согнутый палец». Известны разные типы малоприводных рук, предназначенных для управления максимальным числом степеней свободы пальцев руки при помощи ограниченного количества приводов. В распространенной конструкции, показанной на фигурах, каждый палец содержит несколько последовательно соединенных друг с другом фаланг. Например, палец 12 последовательно содержит проксимальную фалангу 61, соединенную с ладонью 15, среднюю фалангу 62 и дистальную фалангу 63, наиболее удаленную от ладони. Например, ладонь 15 и фаланга 61 соединены между собой и с ладонью при помощи соединения с одной или несколькими степенями свободы, например, поворотной связью. Например, ладонь 15 и фаланга 61 соединены поворотной связью 71а; фаланги 61 и 62 соединены поворотной связью 72а; и фаланги 62 и 63 соединены поворотной связью 73а. В положении по умолчанию, называемом в дальнейшем положением покоя, фаланги пальцев удерживаются в положении за счет пружинного эффекта. Это удержание можно обеспечить на уровне каждой поворотной связи при помощи механического упора, ограничивающего угловое смещение поворотной связи, и пружинного механизма, располагающего фаланги в положение механического упора. Таким образом, фаланги 61, 62 и 63 удерживаются в положении покоя, соответствующем вытянутому пальцу, при помощи спиральных пружин 71b, 72b и 73b, намотанных вокруг поворотных связей 71а, 72а и 73а.
Кроме того, каждый палец содержит соединительную деталь между пальцем и ладонью, выполненную с возможностью перемещения пальца относительно ладони из положения покоя в другое положение, действуя усилием, преодолевающим пружинный эффект. Например, соединительная деталь содержит тросик 75, проходящий через фаланги пальца и соединенный с одной стороны с дистальной фалангой 63, например, при помощи наконечника 75а, и с другой стороны с электрическим приводом (не показан) в ладони. Действуя силой натяжения, превышающей возвратное усилие пружин, привод приводит во вращение каждую из фаланг и перемещает палец из его положения покоя в крайнее положение, называемое сжатым положением, показанное на фиг. 3b.
В малоприводной руке, максимально ограничивающей число приводов, тросики каждого из пальцев соединены с единственным приводом, который может одновременно перемещать все пальцы из положения покоя в сжатое положение. Для обеспечения удержания предметов самых разных формы, как было указано выше, между приводом и тросиками каждого из пальцев предусмотрен педальный рычаг, чтобы распределять усилие натяжения, передаваемое на разные тросики.
Далее заявленная малоприводная рука будет описана в частном случае руки, содержащей несколько пальцев, при этом каждый палец содержит несколько фаланг, удерживаемых в положении пружинным механизмом и соединительным тросиком, натяжение которого при помощи привода позволяет приводить во вращение каждую фалангу с преодолением пружинного эффекта. Настоящее изобретение не ограничивается этим вариантом выполнения. Можно также предусмотреть другие варианты выполнения. Например, пальцы могут содержать единственную фалангу, перемещаемую между двумя крайними положениями. Когда палец содержит несколько фаланг, пружинный эффект, удерживающий палец в положении покоя, можно получить при помощи набора спиральных пружин, связанных с каждой из поворотных связей различных фаланг, как показано на фиг. 3а и 3b, или при помощи пружинного механизма, состоящего из единой детали, соединяющей каждую из фаланг и действующей возвратным усилием, удерживая все фаланги в положении покоя. Точно так же, соединительная деталь между пальцем и ладонью может содержать гибкий тросик 75, такой как металлический тросик, соединяющий механизированный привод, обеспечивающий натяжение тросика, с дистальной фалангой. Можно также предусмотреть соединительную деталь, образованную жесткой механической деталью, входящей в контакт одним концом с механизированным приводом, содержащим вал, оснащенный кулачками, вращение которого приводит в движение жесткую деталь для перемещения пальца.
В дальнейшем положение покоя каждого из пальцев будет соответствовать вытянутому пальцу человеческой руки. Все пальцы находятся в положении покоя в конфигурации «открытой руки», показанной на фиг. 2а. Сжатое положение каждого из пальцев соответствует пальцу, согнутому в направлении ладони. Все пальцы находятся в сжатом положении в конфигурации «сомкнутой руки», показанной на фиг. 2b. Это положение каждого из пальцев относительно ладони для положения покоя и сжатого положения выбирают условно; этот выбор имеет несколько преимуществ с точки зрения потребления энергии приводного двигателя, срока службы или прочности в случае падения. Вместе с тем, не выходя за рамки изобретения, для положения покоя одного или всех пальцев можно выбрать положение, в котором палец или пальцы согнуты в направлении ладони. В этом случае механизированный привод позволяет разогнуть палец или пальцы руки.
Общая идея настоящего изобретения состоит в добавлении возможности движения руке, одновременно сохраняя такую же степень малоприводности. Изобретение состоит в приведении в движение одного или нескольких пальцев из их положения покоя посредством вращения механизированного вала в одном направлении и одного или нескольких пальцев посредством вращения в противоположном направлении вращения. Предпочтительно изобретение использует две движущие способности вращающегося привода для обеспечения двух разных движений пальцев руки из одной и той же исходной конфигурации. В варианте выполнения, представленном на фигурах, вращение вращающегося привода в первом направлении позволяет перейти из конфигурации «открытая рука» к конфигурации «сомкнутая рука», при этом вращение в противоположном направлении позволяет перейти из конфигурации «открытая рука» к конфигурации «вытянутый палец». Как было указано выше, положение каждого из пальцев для трех конфигураций можно выбирать произвольно. Рука может быть выполнена таким образом, чтобы каждый из пальцев можно было перемещать во время вращения в первом направлении вращения, в противоположном направлении вращения и в обоих направлениях вращения или ни в одном из двух направлений вращения. В целом изобретение относится к механизированному валу, выполненному с возможностью перемещения соответственно по меньшей мере первого пальца и по меньшей мере второго пальца из их положения покоя в их сжатое положение посредством вращения механизированного вала соответственно в первом направлении вращения и в противоположном направлении.
В рамках изобретения фиг. 4а и 4b иллюстрируют принцип перемещения пальца руки из конфигурации «открытая рука» соответственно в конфигурацию «сомкнутая рука» и в конфигурацию «вытянутый палец». На обеих фигурах показаны три пальца руки: указательный палец 12, средний палец 13 и безымянный палец 14. Ладонь и большой палец не показаны. В левой части обеих фигур три пальца находятся в своем положении покоя, удерживаемом за счет пружинного эффекта. В правой части фиг. 4а три пальца находятся в своем сжатом положении, при этом указательный палец 13 удерживается в положении покоя (конфигурация «вытянутый палец»).
Рука содержит механизированный вал 20, соединенный с каждым из пальцев 12, 13 и 14 при помощи соединительной детали 22, 23 и 24, в данном случае представляющей собой гибкий тросик, соединенный с одной стороны с пальцем и с другой стороны с механизированным валом 20. Механизированный вал 20 может быть установлен в ладони 15 руки или в предплечье робота или даже в туловище робота в соответствии с длиной соединительных деталей. В исходной конфигурации, показанной в левой части, соединительные тросики натянуты возвратной силой, создаваемой пружинами пальцев. Начиная от этой исходной конфигурации, механизированный вал 20 может приводиться во вращение в двух направлениях вращения вокруг главной оси Х. Вращение вала приводит в движение тросик, который наматывается вокруг вала, создавая силу натяжения, преодолевающую пружинный эффект. Палец сгибается, перемещаясь из своего положения покоя в свое сжатое положение. Предпочтительно вал может иметь первый радиальный профиль, на который наматывается тросик во время вращения в первом направлении вращения, и второй радиальный профиль, на который наматывается тросик во время вращения в противоположном направлении вращения. Точно так же, вал может иметь несколько первых и вторых радиальных профилей, на который может наматываться тросик каждого из пальцев. Выполнение первого и второго радиальных профилей позволяет получить большую гибкость при разработке двух движений руки, управляемых при помощи одного вращающегося привода.
На фиг. 5 показан механизированный вал и соединительные детали, применяемые в примере выполнения руки. В левой части показаны в разборе механизированный вал 20, состоящий из верхней части 20а и нижней части 20b, и соединительная деталь 22 пальца 12, содержащая гибкий тросик 122а и крепление 122b. Соединительная деталь 22 соединена с одной стороны с пальцем 12 и с другой стороны с валом 20 при помощи наконечника 122b, установленного в полости 202 вала 20.
В центральной части фигуры показаны сбоку вал 20 и соединительные детали 22 и 24 пальцев 12 и 14. В правой части фигуры показаны эти же компоненты в двух сечениях А-А и В-В. Как показано на этих фигурах, тросик 122а проходит через вал в радиальном направлении по каналу 202а, соединяющему полость 202 и конец первого радиального профиля 32а и конец второго радиального профиля 32b. Таким образом, в зависимости от направления вращения вала тросик 22 указательного пальца 12 может наматываться на один из двух радиальных профилей 32а или 32b, показанных в сечении А-А. Точно так же, тросики 23 или 24 среднего пальца 13 и безымянного пальца 14 наматываются на один из двух радиальных профилей 34а или 34b, показанных в сечении А-А.
Следует отметить, что для каждого пальца первый и второй радиальные профили проходят по первому и второму участку окружности. Первый и второй радиальные профили имеют один общий конец, соответствующий концу канала, через который проходит тросик. Первый и второй профили могут быть по существу кольцевыми и выполненными на участке окружности, близком к полуокружности, как в случае радиальных профилей 34а и 34b, соответствующих пальцам 13 и 14. При этом диаметры первого и второго радиальных профилей определяют ход тросика и амплитуду перемещения пальца. Однако изобретение не ограничивается таким выбором. Можно предусмотреть не кольцевые радиальные профили, позволяющие адаптировать скорость перемещения пальца во время вращения вала. Точно так же, валом можно управлять таким образом, чтобы проходить всю длину радиального профиля или только ее часть.
Можно также конфигурировать механизированный вал таким образом, чтобы удерживать палец в положении покоя во время вращения механизированного вала. Этот случай показан на фиг. 3b, в частности, для указательного пальца 12, который остается в положении покоя, несмотря на вращение вала в первом направлении вращения. Для этого наконечник 122b соединительной детали 22 имеет форму, имеющую возможную ось вращения, например, по существу цилиндрическую или сферическую форму, и установлено с возможностью свободного вращения в полости 202 вокруг оси, совпадающей с главной осью вращения вала. Кроме того, канал проходит через вал радиально по всему участку окружности первого радиального профиля. При таком выполнении тросик 122а может проходить через вал в радиальном направлении по всему участку окружности первого радиального профиля. Вращение вала в первом направлении вращения приводит к вращению наконечника 122b относительно его приемной полости 202, при этом тросик 122а остается натянутым за счет пружинного эффекта. Палец по-прежнему удерживается в положении во время вращения вала в первом направлении вращения. С другой стороны, вращение вала в противоположном направлении приводит к наматыванию тросика на втором радиальном профиле 32b, что приводит к перемещению указательного пальца.
Предпочтительно выполнение первого и второго радиальных профилей обеспечивает большую гибкость концепции для двух движений пальцев руки. Предпочтительно некоторые пальцы могут быть соединены с валом при помощи общего радиального профиля таким образом, что пальцы перемещаются с одним профилем скорости и с одинаковой амплитудой. В представленном примере это относится к среднему пальцу 13 и к безымянному пальцу 14.
На фиг. 6а и 6b показаны в двух видах механизированный вал и соединительные детали между валом и тремя пальцами руки робота.
Для упрощения изготовления робота и сокращения производственных расходов настоящим изобретением предусмотрена рука, содержащая строго идентичные пальцы. В представленном примере указательный палец 12, средний палец 13 и безымянный палец 14 являются тремя пальцами с тремя идентичными фалангами и с идентичными компонентами. Три пальца различаются только своей установкой в ладони руки. Для усиления схожести с человеческой рукой три пальца соединены с ладонью руки в трех точках, по существу образующих дугу окружности; указательный палец 12 и безымянный палец 14 установлены с отступом относительно среднего пальца 13. Предпочтительно вал установлен в ладони руки таким образом, чтобы указательный палец 12 и безымянный палец 14 находились по существу на одинаковом расстоянии от оси вращения вала. Таким образом, для этих двух пальцев можно применять строго идентичные соединительные детали 22 и 24. Как показано на фиг. 5а, наконечники соединительных деталей 22 и 24 установлены в двух полостях 202 и 204, выполненных в валу вдоль главной оси вала. Для среднего пальца 13 можно применить идентичную соединительную деталь 23. Для этого наконечник соединительной детали 23 установлен в полости 203, выполненной в валу на расстоянии "d" от главной оси вала. Таким образом, расстояние "dʺ соответствует смещению установки пальцев в ладони, которые образуют вышеупомянутую дугу окружности. Хотя приемные полости для средств 23 и 24 соединения выполнены в валу на двух разных расстояниях от оси вращения вала, ход тросиков во время вращения является идентичным, поскольку радиальные профили являются идентичными. Следовательно, перемещения среднего пальца и безымянного пальца являются идентичными.
Предпочтительно средства соединения могут быть строго идентичными, в частности, что касается длины соединительного тросика, при этом их установка в разных местах на механизированном валу обеспечивает установку на разном расстоянии от механизированного вала.
Наконец, необходимо отметить, что можно предусмотреть соединение всех пальцев руки с механизированным валом и, в частности, большого пальца при помощи соединительной детали 21, показанной на Фиг. 6b.
Как было указано выше, применение соединительной детали, содержащей гибкий тросик, перемещающий палец при наматывании вокруг механизированного шкива, является лишь частным примером. Можно также предусмотреть другие варианты соединения, например, жесткую связь, приводимую в движение при помощи первого и второго кулачков вала посредством вращения вала в первом направлении и в противоположном направлении. Предпочтительно эти два разных варианта выполнения используют две приводные возможности вращающегося привода для обеспечения двух возможных движений пальцев малоприводной руки. Для этого в этих разных вариантах выполнения объединены отличительные признаки, раскрытые в представленном ниже главном пункте формулы изобретения.
Изобретение относится к руке робота-гуманоида, содержащей ладонь и несколько пальцев (11, 12, 13, 14), каждый из пальцев (12, 13, 14) выполнен с возможностью перемещения относительно ладони между положением покоя, удерживаемым за счет пружинного эффекта, и сжатым положением, получаемым за счет приведения в движение детали (22, 23, 24) соединения с ладонью с преодолением пружинного эффекта. Рука содержит механизированный вал (20), соединенный с соединительной деталью (21, 22, 23, 24) каждого из пальцев (11, 12, 13, 14) и выполненный с возможностью перемещения первого пальца (12) и второго пальца (13) из положения покоя в сжатое положение за счет вращения механизированного вала (20) соответственно в первом направлении вращения и в противоположном направлении. Два пальца (11, 12) установлены в ладони (15) таким образом, что представляют собой соответственно большой палец (11) и указательный палец (12). Указательный палец (12) или большой палец (11) удерживаются в положении покоя во время вращения вала в первом направлении, при этом вращение вала (20) в противоположном направлении перемещает все пальцы (11, 12, 13, 14) руки (4) в сжатое положение, образуя вместе с ладонью (15) сомкнутую руку. Изобретение обеспечивает увеличение возможности контроля руки. 2 н. и 9 з.п. ф-лы, 6 ил.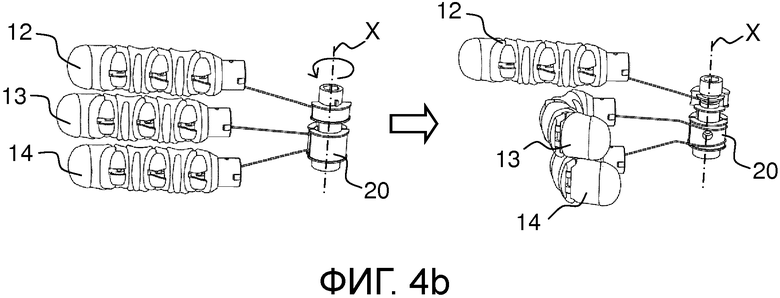
1. Рука, предназначенная для оснащения робота-гуманоида, при этом рука (4) содержит ладонь (15) и несколько пальцев (11, 12, 13, 14), при этом каждый из пальцев (12, 13, 14) выполнен с возможностью перемещения относительно ладони (15) между положением покоя, удерживаемым за счет пружинного эффекта, и сжатым положением, получаемым за счет приведения в движение соединительной детали (22, 23, 24) между пальцем (12, 13, 14) и ладонью (15) с преодолением пружинного эффекта,
отличающаяся тем, что она содержит механизированный вал (20), соединенный с соединительной деталью (21, 22, 23, 24) каждого из пальцев (11, 12, 13, 14) и выполненный с возможностью перемещения из положения покоя в сжатое положение по меньшей мере первого пальца (12) за счет вращения механизированного вала (20) в первом направлении вращения и по меньшей мере второго пальца (13) за счет вращения механизированного вала (20) в противоположном направлении вращения,
при этом два пальца (11, 12) установлены в ладони (15) таким образом, что представляют собой соответственно большой палец (11) и указательный палец (12), при этом указательный палец (12) или большой палец (11) удерживаются в положении покоя во время вращения вала в первом направлении, при этом вращение вала (20) в противоположном направлении перемещает все пальцы (11, 12, 13, 14) руки (4) в сжатое положение, образуя вместе с ладонью (15) сомкнутую руку.
2. Рука по п. 1, в которой вал (20) содержит первый и второй радиальные профили (34а, 32b) соответственно на первом и втором участках своей окружности, выполненные с возможностью приведения в движение соединительной детали (24) пальца (14) во время вращения вала (20) соответственно в первом направлении и в противоположном направлении вращения.
3. Рука по п. 2, в которой один из пальцев (12) выполнен с возможностью перемещения путем вращения вала (20) только в одном из двух направлений вращения.
4. Рука по п. 2 или 3, в которой в положении покоя пальцы (11, 12, 13, 14) образуют вместе с ладонью (15) раскрытую руку.
5. Рука по п. 2, в которой соединительная деталь (22) одного из пальцев (12) содержит тросик (122а), соединенный с одной стороны с пальцем (12) и с другой стороны с валом (20) при помощи наконечника (122b), установленного в полости (202) вала (20), при этом тросик (122а) проходит в радиальном направлении через вал (20) по каналу (202а), соединяющему полость (202) и конец одного из радиальных профилей (32b), таким образом, чтобы вращение вала (20) в одном направлении способствовало наматыванию тросика (122а) на упомянутый радиальный профиль (32b), что приводит к перемещению пальца (12) за счет натяжения тросика (122b).
6. Рука по п. 5, в которой упомянутый радиальный профиль (32b) является по существу кольцевым на участке окружности, близком к полуокружности с центром на оси (Х) вращения вала (20), при этом тросик (122а) упомянутого пальца (12) выполнен с возможностью намотки на радиальный профиль, при этом диаметр радиального профиля определяет ход тросика (122а) и амплитуду перемещения пальца (12) между положением покоя и сжатым положением.
7. Рука по п. 5 или 6, в которой соединительная деталь (22) одного из пальцев (12) содержит наконечник (122b), установленный с возможностью свободного вращения в полости (202), центрованной по оси (Х) вращения вала, при этом канал (202а) выполнен таким образом, что позволяет тросику (122а) проходить через вал (20) в радиальном направлении вдоль радиального профиля (32а), чтобы удерживать палец (12) в положении покоя во время вращения вала (20).
8. Рука по п. 5, в которой вал (20) имеет несколько первых и вторых радиальных профилей (32a, 32b, 34a, 34b), расположенных последовательно вдоль оси (Х) вращения вала (20), для одновременного перемещения нескольких пальцев (12, 14).
9. Рука по п. 5, содержащая два идентичных пальца (13, 14), соединенных с валом двумя тросиками одинаковой длины и двумя одинаковыми наконечниками, при этом вал (20) содержит две приемные полости (203,204), выполненные в валу (20) на двух разных расстояниях (d) от оси (Х) вращения вала (20), позволяющие установить два пальца (13, 14) в ладони (15) руки (4) на двух разных расстояниях от оси (Х) вращения вала (20).
10. Рука по п. 2, в которой соединительная деталь одного из пальцев является жесткой, и в которой вал содержит первый и второй кулачки, при этом соединительную деталь перемещают соответственно при помощи первого и второго кулачков за счет вращения вала соответственно в первом направлении и в противоположном направлении.
11. Робот-гуманоид, оснащенный рукой (4) по любому из пп.1-10.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 201734803 U, 09.02.2011 | |||
| US 8573663 B1, 05.11.2013. | |||

