Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к кисти, предназначенной для антропоморфного робота.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Кисть человека представляет собой очень сложную часть человеческого тела. Она содержит несколько пальцев, сочлененных суставами вокруг ладони кисти. Более того, каждый палец имеет несколько сочлененных суставами фаланг. Каждый сустав приводится в движение посредством мышцы. Различные суставы кисти, в частности, позволяют захватывать объекты различных форм. Сделаны многочисленные попытки для максимального приближения антропоморфных роботов к функциональным возможностям человека. Воспроизведение движений кисти робота требует большого количества независимых приводов для обеспечения захвата различных объектов. Это увеличивает сложность робота и с точки зрения количества обеспеченных независимых приводов, и с точки зрения управления этими различными приводами, которые должны управляться согласованным образом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей изобретения является упрощение изготовления кисти антропоморфного робота, при сохранении ее пригодности для захвата объектов различных форм.
Для решения задачи предложена кисть, предназначенная для антропоморфного робота, причем кисть содержит ладонь и по меньшей мере один палец, шарнирно соединенный с ладонью, причем палец содержит по меньшей мере одну фалангу и по меньшей мере одно шарнирное соединение, соединяющее фалангу с ладонью, причем фаланга продолжается в основном направлении, отличающаяся тем, что шарнирное соединение содержит упругий соединительный элемент, обеспечивающий несколько степеней свободы, тем, что кисть содержит средство моторизации для степени свободы при вращении из степеней свободы, обеспечиваемых соединительным элементом, причем моторизованная степень свободы при вращении обеспечивает относительное перемещение вокруг оси под прямыми углами к главному направлению фаланги, и тем, что другие степени свободы из степеней свободы, обеспечиваемых соединительным элементом, не моторизованы.
Каждый палец кисти может содержать несколько последовательных фаланг, причем две последовательные фаланги соединены шарнирным соединением, содержащим упругий соединительный элемент, подобный соединительному элементу, соединяющему фалангу с ладонью.
Каждый упругий соединительный элемент предпочтительно имеет нейтральное положение, определенное таким образом, что средство моторизации обеспечивает угловое перемещение шарнирного соединения, содержащего рассматриваемый упругий соединительный элемент, в обе стороны от нейтрального положения.
В изобретении наличие упругого соединительного элемента в каждом шарнирном соединении позволяет улучшать податливость пальца к форме объектов, с которыми он может столкнуться. Податливость пальца следует понимать, как его способность приспосабливаться к давлениям и силам, которые воздействуют на него.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием вариантов его осуществления, приводимым со ссылками на сопровождающие чертежи, на которых:
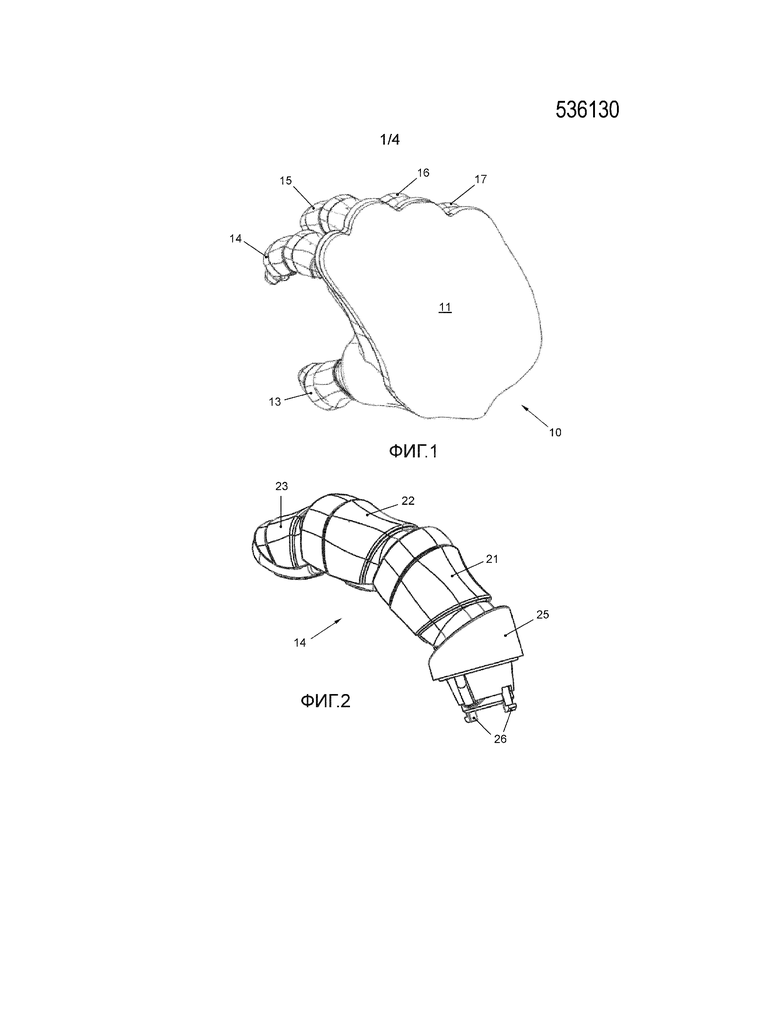
Фигура 1 представляет собой вид в изометрии кисти, предназначенной для антропоморфного робота;
Фигура 2 представляет собой вид в изометрии пальца кисти по Фигуре 1;
Фигура 3 показывает палец, изображенный на Фигуре 2, в продольном сечении;
Фигура 4 показывает разобранный вид пальца на Фигуре 2;
Фигура 5 показывает палец на Фигуре 2, в поперечном сечении;
Фигуры 6A и 6B показывают податливость пальца при столкновении с препятствием.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Для ясности одинаковые элементы имеют одинаковые ссылочные позиции на разных фигурах.
Фигура 1 показывает кисть 10, предназначенную для антропоморфного робота. Кисть 10 содержит ладонь 11 и пять пальцев 13-17. Пальцы шарнирно соединены с ладонью 11 таким образом, чтобы позволять захват объектов между пальцами 13-17. Подобно кисти человека палец 13 представляет собой большой палец. Захваченный кистью объект удерживается между большим пальцем 13 и другими пальцами 14-17. Изобретение не ограничивается кистью, имеющей пять пальцев. Количество пальцев может быть уменьшено для упрощения конструкции кисти или еще увеличено для обеспечения захвата особых объектов.
Фигура 2 показывает вид в перспективе пальца, которым оборудована кисть 10. Он представляет собой указательный палец 14, содержащий три последовательных фаланги 21, 22 и 23. Фаланги последовательно шарнирно соединены относительно ладони 11 кисти 10. Конкретнее, фаланга 21 шарнирно соединена с ладонью 11. Фаланга 22 шарнирно соединена с фалангой 21. Фаланга 23 шарнирно соединена с фалангой 22 и образует свободный конец пальца 14. Три фаланги 21, 22 и 23 образованы по образу пальца человека. Как и выше для количества пальцев, возможно образование пальца, имеющего другое количество фаланг, без отклонения от объема охраны изобретения, возможно уменьшение их количества для упрощения конструкции кисти или увеличение их количества для особого использования кисти.
В более общем смысле, кисть согласно изобретению может быть образована захватывающим устройством, позволяющим захватывать объект. Захватывающее устройство содержит по меньшей мере один подвижный палец, оборудованный несколькими шарнирно соединенными фалангами, обеспечивающими несколько точек контакта с захваченным объектом. К этому шарнирно соединенному пальцу может быть обращен неподвижный палец или даже непосредственно ладонь кисти.
Выше отмечено, что фаланга 21 шарнирно соединена с ладонью 11. На Фигуре 2 можно увидеть установочный элемент 25, который предназначен для крепления к ладони 11, например, посредством защелок 26. Шарнирное соединение пальца 14 образовано между фалангой 21 и установочным элементом 25. С функциональной точки зрения установочный элемент 25 образует неотъемлемую часть ладони 11.
Нижеследующее описание описывает указательный палец 14. Очевидно, что изобретение может быть осуществлено для каждого из пальцев 14-17 и даже для большого пальца 13.
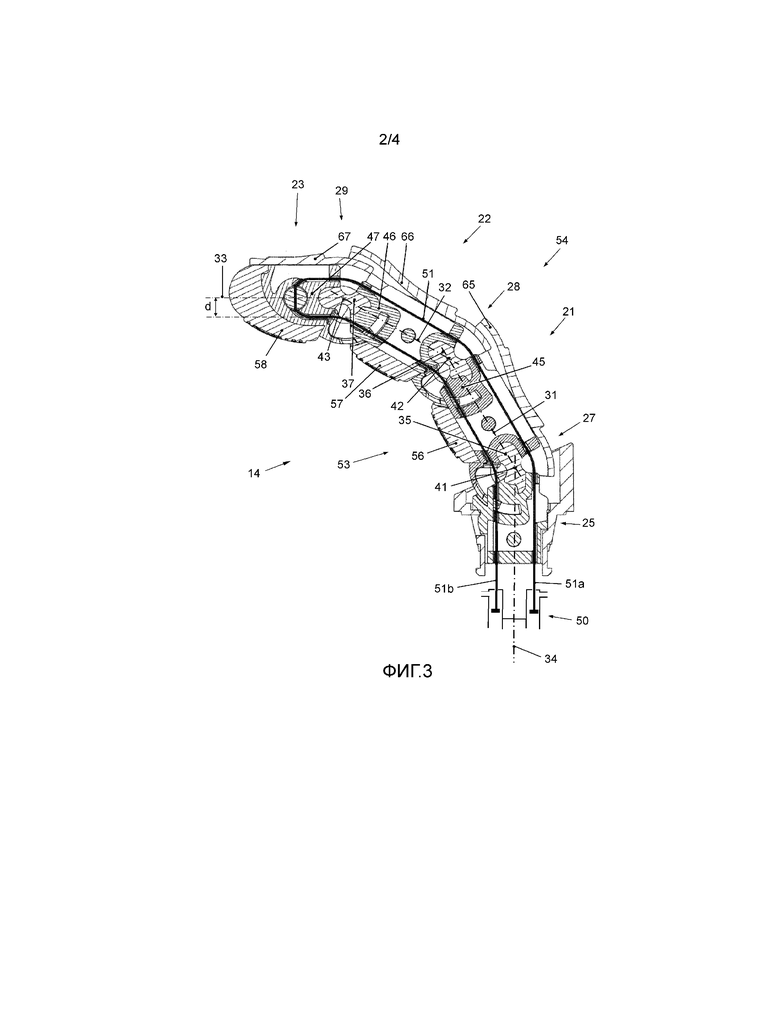
Фигура 3 показывает палец 14 в продольном сечении. Шарнирное соединение между установочным элементом 25 и фалангой 21 обозначено ссылочной позицией 27. Шарнирное соединение между фалангами 21 и 22 обозначено ссылочной позицией 28, а шарнирное соединение между фалангами 22 и 23 обозначено ссылочной позицией 29.
В представленном примере другие пальцы 13, 15, 16 и 17 подобны пальцу 14. Каждый из них содержит несколько шарнирно соединенных фаланг, например, три фаланги для приближения к анатомии человека.
Каждая из фаланг 21, 22 и 23 продолжается в главном направлении 31, 32 и 33 соответственно. Палец 14 содержит упругие соединительные элементы, обеспечивающие взаимное шарнирное соединение фаланг и первой фаланги 21 относительно ладони 11. Соединительные элементы образуют шарнирные соединения 27, 28 и 29. Конкретнее, соединительный элемент 35 соединяет установочный элемент 25, и в связи с этим ладонь 11, с первой фалангой 21. Соединительный элемент 36 соединяет фаланги 21 и 22. Соединительный элемент 37 соединяет фаланги 22 и 23. Соединительный элемент 35 обеспечивает несколько степеней свободы между первой фалангой 21 и ладонью 11. Соединительные элементы 36 и 37 обеспечивают несколько степеней свободы между двумя последовательными фалангами, которые соединяют соединительные элементы 36 и 37. Каждый из соединительных элементов 35, 36 и 37 образован из блока упругого материал, закрепленного в жестких частях, между которыми они расположены. Соединительный элемент обеспечивает несколько степеней свободы между двумя жесткими элементами, которые он соединяет, главным образом, три вращательных движения, а также три поступательных движения с небольшими перемещениями.
Для каждого из шарнирных соединений 27, 28, 28 и 29 одно из вращательных движений моторизовано, а другие степени свободы, обеспечиваемые рассматриваемым соединительным элементом, не моторизованы. Другими словами, кисть 10 содержит средство моторизации для степени свободы при вращении из степеней свободы, обеспечиваемых соединительным элементом рассматриваемого шарнирного соединения.
Моторизованное вращение происходит вокруг оси под прямыми углами к главным направлениям двух соседних фаланг, т.е. оси 42 для шарнирного соединения 28 и оси 43 для шарнирного соединения 29. Для шарнирного соединения 27 между первой фалангой 21 и ладонью 11 моторизованное вращение происходит вокруг оси 41 под прямыми углами к направлению 31 и под прямыми углами к оси 34, образующей главное направление установочного элемента 25. Главное направление 34 зафиксировано относительно ладони 11.
Различные степени свободы, обеспечиваемые соединительным элементом, придают пальцу 14 определенную гибкость для адаптации к форме различных объектов, которые способна захватывать или ударять кисть 10. Эта гибкость позволяет улучшать податливость кисти к форме объекта, с которым она может столкнуться. Благодаря изобретению кисть улучшает свою способность приспосабливаться к давлениям и силам, которые воздействуют на нее.
Различные упругие соединительные элементы 35, 36 и 37 могут быть идентичными и в связи с этим имеют идентичную жесткость. Альтернативно каждый из различных упругих соединительных элементов 35, 36 и 37 имеет жесткость, которая уменьшается с расстоянием от ладони 11. Это уменьшение жесткости обеспечивает уменьшение силы, которую каждая фаланга 21, 22 и 23 прикладывает к объекту, захваченному кистью 10.
Жесткость каждого шарнирного соединения может отличаться согласно степеням свободы, обеспечиваемым рассматриваемым шарнирным соединением. Уменьшение жесткости может относиться только к моторизованной степени свободы и/или другим немоторизованным степеням свободы.
Каждая фаланга содержит жесткий каркас. Конкретнее, фаланга 21 содержит жесткий каркас 45, фаланга 22 содержит жесткий каркас 46, а фаланга 23 содержит жесткий каркас 47. Соединительный элемент 35 закреплен в установочном элементе 25 и в жестком каркасе 45. Соединительный элемент 36 закреплен в жестких каркасах 45 и 46. Соединительный элемент 37 закреплен в жестких каркасах 46 и 47. Гибкость соединительных элементов 35, 36 и 37 может быть получена между скреплениями каждого из них. Возможно изготовление трех соединительных элементов 35, 36 и 37 из одного материала, такого как, например, материал на основе силикона. Уменьшение жесткости может быть получено путем утончения соединительных элементов между их соответственными скреплениями. В более общем смысле, жесткость каждого шарнирного соединения может быть получена путем образования формы рассматриваемого соединительного элемента.
Моторизация согласно одной степени свободы может быть выполнена автономно для каждого из шарнирных соединений между фалангами и между ладонью 11 и первой фалангой 21. Предпочтительно средства моторизации содержат привод 50 общий для всех шарнирных соединений 27, 28 и 29 пальца 14. Общий привод 50 позволяет упростить конструкцию и управление кистью. Наряду с уменьшением жесткости соединительных элементов 35, 37 и 36 общий привод 50 позволяет улучшать зажатие объектов, захваченных кистью 10, обеспечивая лучшее закрытие конца пальца над объектом. Конкретнее, для одной и той же команды от общего привода 50 благодаря уменьшению жесткости соединительных элементов 35, 37 и 36 будет достигнуто возрастающее угловое смещение каждого из шарнирных соединений 27, 28 и 29 по мере удаления от ладони 11. Уменьшение жесткости, связанное с общим приводом, также позволяет получать прогрессивную кинематику закрытия и открытия для всех шарнирных соединений пальца. Эта кинематика близка к кинематике пальца человека, который движется независимыми мышцами. Палец согласно изобретению и движимый одним приводом намного проще управляется, чем роботизированный палец, имеющий столько же приводов, сколько фаланг.
В качестве примерного варианта выполнения, осуществляющего общий привод 50, средства моторизации содержат тросик 51, направляемый в каждом жестком каркасе 45, 46 и 47 и в установочном элементе 25. Тросик 51 проходит через установочный элемент 25 к первой фаланге 21 и от одной фаланги к другой на расстоянии от оси моторизованной степени свободы при вращении. Тросик 51 приводится в действие общим приводом 50. Фигура 3 показывает расстояние d, отделяющее ось 43 от направления тросика 51 в жестком каркасе 47 фаланги 23. Это расстояние d позволяет получать движущий крутящий момент шарнирного соединения 29 при натяжении тросика 51 общим приводом 50.
Тросик 51 может быть закреплен в жестком каркасе 47 последней фаланги 23 и проходить до ладони 11 только по внутренней поверхности 53 пальца 14, т.е. поверхности, предназначенной для контакта с захватываемыми объектами. Таким образом, общий привод 50, расположенный в ладони 11, представляет собой привод одностороннего действия, который может натягивать тросик 51 для закрытия пальца 14. Когда тросик 51 ослаблен, жесткость соединительных элементов 35, 36 и 37 позволяет повторно открывать палец 14. Альтернативно общий привод 50 может представлять собой привод двойного действия. При осуществлении тросика 51, связанного с приводом 50 двойного действия, тросик 51 проходит вдоль внутренней поверхности 53 и вдоль внешней поверхности 54 пальца 14, противоположной внутренней поверхности 53. Тросик 51 может проходить на таком же расстоянии d от осей 41, 42 и 43 для обеих поверхностей 53 и 54 пальца 14. Таким образом, привод 50 двойного действия может натягивать тросик 51 со стороны внутренней поверхности 53 для закрытия пальца 14 или со стороны внешней поверхности 54 для открытия пальца 14.
Сила, которую привод 50 прикладывает к тросику 51, пропорциональна упругой деформации различных соединительных элементов 35, 36 и 37. Максимальная сила, которую способен прикладывать привод, будет достигнута либо для пальца, который полностью открыт, либо для пальца, который полностью закрыт, т.е. в одном из максимальных угловых положений шарнирных соединений 27, 28 и 29. Когда палец закрыт над захватываемым объектом, также необходимо учитывать силу, которую необходимо приложить к захваченному объекту для удержания его в кисти 10.
Для ограничения максимальной силы, которую должен прикладывать привод, возможно определение нейтрального положения пальца, в котором сила не прикладывается к тросику 51. Это нейтральное положение зависит от формы в состоянии покоя каждого из соединительных элементов 35, 36 и 37. Например, каждый из упругих соединительных элементов 35, 36 и 37 имеет нейтральное положение, определенное таким образом, что средство моторизации обеспечивает угловое перемещение шарнирного соединения 27, 28 или 29, содержащего рассматриваемый упругий соединительный элемент 35, 36 или 37, в обе стороны от нейтрального положения.
Нейтральное положение может быть определено как среднее положение пальца 14 между двумя его крайними положениями, полностью согнутым по направлению к ладони 11 кисти 10 и максимально вытянутым, когда направления 31-34 выровнены. Также возможно смещение этого нейтрального положения для содействия одному из моторизованных перемещений пальца 14 по направлению к его вытянутому положению или по направлению к его согнутому положению. Например, для обеспечения достаточной силы от пальца на захваченном объекте нейтральное положение может быть определено ближе к согнутому крайнему положению, чем к максимальному вытянутому положению.
Предпочтительно каждая фаланга 21, 22 и 23 содержит гибкий элемент 56, 57 и 58 соответственно, расположенный на внутренней поверхности 53 пальца 14. Эти гибкие элементы, например, изготовленные из материала на основе силикона, путем деформации при контакте с объектом, захваченным кистью 10, позволяют увеличивать площадь контактной поверхности между каждой из фаланг 21, 22 и 23 и захваченным объектом. Материал, выбранный для изготовления гибких элементов 56, 57 и 58, может иметь поверхностные свойства, обеспечивающие улучшение адгезии с захваченным объектом. Материал на основе силикона хорошо подходит для выполнения этой функции. В более общем смысле, гибкие элементы 56, 57 и 58 обеспечивают улучшение захвата объекта пальцем 14.
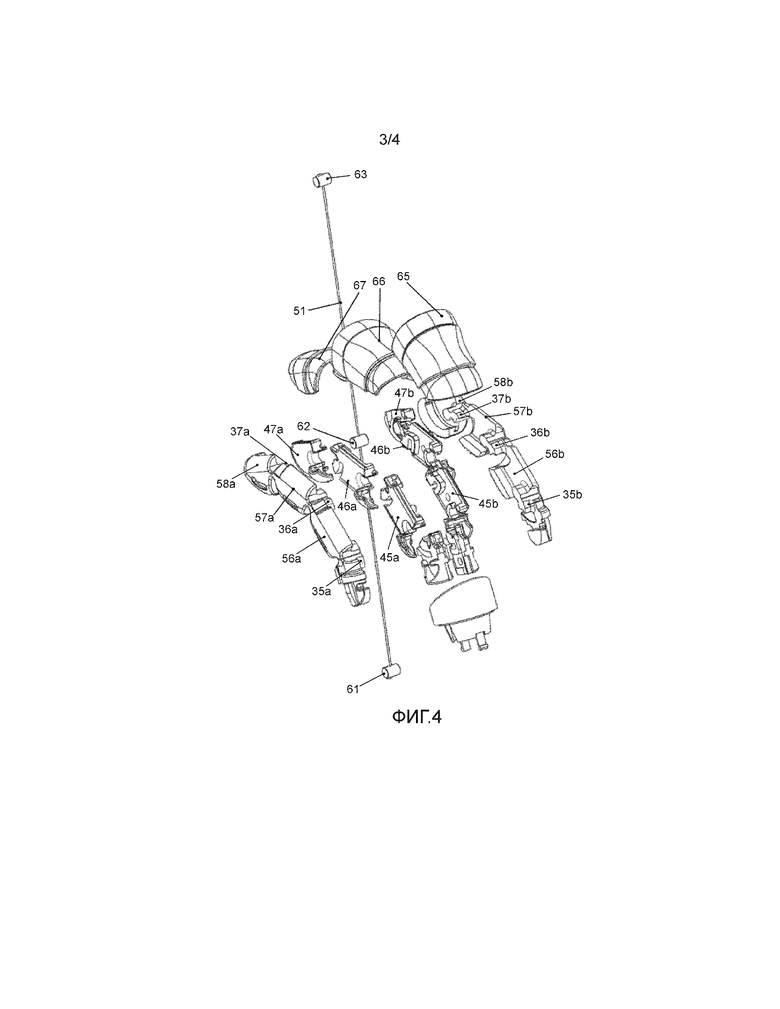
Фигура 4 показывает разобранный вид в перспективе пальца 14. В представленном примере для каждой из фаланг 21, 23 и 22 жесткий каркас образован из двух частей, 45a и 45b для жесткого каркаса 45, 46a и 46b для жесткого каркаса 46, и 47a и 47b для жесткого каркаса 47 соответственно. Для каждого каркаса две части позволяют упрощать установку пальца 14 для направления тросика 51 между двумя частями. Для каждой из фаланг 21, 23 и 22 две части продолжаются, главным образом, с каждой стороны от главного направления рассматриваемой фаланги.
На Фигуре 4 тросик 51 показан прямолинейным до его установки путем направления между двумя частями каждой фаланги. Тросик 51 содержит концевые крепления, образующие выступы, прикрепленные к тросику 51, каждый из которых обеспечивает фиксацию точки тросика 51. В представленном примере тросик 51 может быть образован из пучка стальных проводов, на котором отформованы или обжаты три концевых крепления 61, 62 и 63. Каждое из концевых креплений 61 и 63 прикреплено к одному из концов тросика 51. Концевые крепления 61 и 63 позволяют приводу 50, в случае привода двойного действия, натягивать каждый из концов тросика 51. Концевое крепление 62 позволяет зафиксировать тросик 51 в жестком каркасе 47 последней фаланги 23, и концевое крепление 62 может быть зафиксировано по существу на середине тросика 51 или смещено относительно середины в зависимости от необходимой амплитуды перемещения пальца 14. Конкретнее, концевое крепление 62 предпочтительно расположено на конце последней фаланги 23. Фигура 3 показывает палец 14 в среднем положении между вытянутым положением, в котором направления 31-34 выровнены, и согнутым положением по направлению к ладони 11. В среднем положении длина части 51a тросика 51, обеспечивающая вытягивание пальца 14, больше, чем длина части 51b тросика 51, обеспечивающей сгибание пальца 14. Части 51a и 51b тросика 51 расположены по обе стороны от концевого крепления 62.
Альтернативно возможна установка двух отдельных тросиков, каждый из которых действует по направлению к одному из крайних положений пальца 14. Два отдельных тросика соответствуют каждой из частей 51a и 51b.
Предпочтительно каждая фаланга 21, 22 и 23 содержит кожух 65, 66 и 67 соответственно, покрывающий внешнюю поверхность 54 пальца 14.
Предпочтительно для каждой из фаланг 21, 23 и 22 кожух и гибкий элемент имеют комплементарные формы, изготовленные так, чтобы выполнять скрепление каркаса, гибкого элемента и кожуха. Возможно выполнение каждого скрепления путем деформации соответствующего гибкого элемента. Таким образом, исключается использование крепежного приспособления, такого как винт.
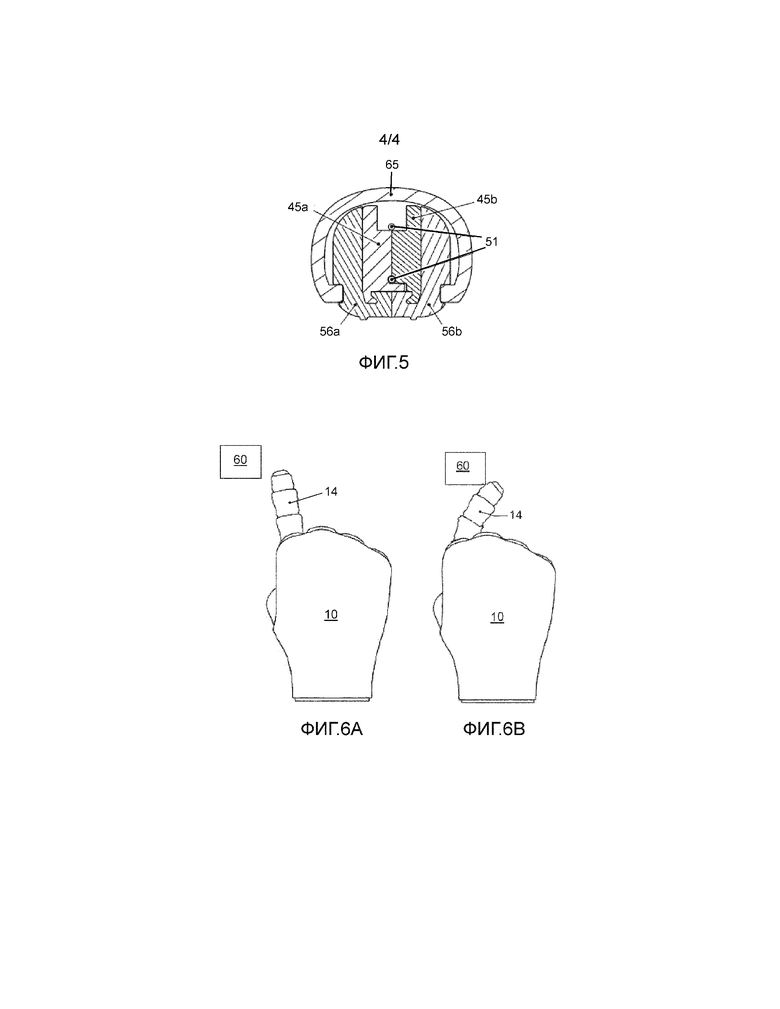
Фигура 5 показывает палец 14 в поперечном сечении фаланги 21. Другие фаланги 22 и 23 имеют подобные поперечные сечения.
Предпочтительно для облегчения их изготовления и сборки для каждой из фаланг 21, 23 и 22 гибкий элемент образован из двух частей, окружающих жесткий каркас. Конкретнее, гибкий элемент 56 образован из двух частей 56a и 56b. Гибкий элемент 57 образован из двух частей 57a и 57b, а гибкий элемент 58 образован из двух частей 58a и 58b. Две части каждого гибкого элемента окружают жесткий каркас. Для каждой из фаланг 21, 23 и 22 две части гибких элементов продолжаются, главным образом, по обе стороны от главного направления рассматриваемой фаланги. Это конструкция отчетливо видна на Фигуре 5.
Предпочтительно различные гибкие элементы и другие соединительные элементы могут быть изготовлены путем их группирования пополам в продольном направлении. Упругие соединительные элементы 35, 36 и 37 могут быть образованы так, что главные направления 31, 32 и 33 различных фаланг и главное направление 34 установочного элемента 25 остаются в плоскости, называемой продольной плоскостью пальца 14, когда давление не прикладывается к соединительным элементам 35, 36 и 37 согласно их немоторизованным степеням свободы. Она представляет собой плоскость сечения на Фигуре 3. Группирование пополам выполнено по обе стороны от продольной плоскости.
Конкретнее, соединительные элементы 35, 36 и 37 могут быть, как и гибкие элементы 56, 58 и 57, изготовлены из двух частей. Соединительный элемент 35 образован из двух частей 35a и 35b. Соединительный элемент 36 образован из двух частей 36a и 36b. Соединительный элемент 37 образован из двух частей 37a и 37b. Части 35a, 56a, 36a, 57a, 37a и 58a могут быть изготовлены в виде цельноформованного элемента, например, из силикона. Подобным образом части 35b, 56b, 36b, 57b, 37b и 58b могут быть сгруппированы в виде единого элемента. Группирование различных элементов позволяет упрощать изготовление пальца путем объединения нескольких функций в одном механическом элементе, а именно улучшения захвата объекта пальцем 14 и гибкости каждого шарнирного соединения пальца 14.
Фигуры 6A и 6B показывают податливость пальца при столкновении с препятствием. На Фигуре 6A показана кисть 10 с вытянутым указательным пальцем. Объект 60 расположен на расстоянии от кисти 10, не касаясь ее. Моторизация пальца 14 позволяет сгибание пальца 14 при движении, по существу, под прямыми углами к плоскости Фигур 6A и 6B. На фигуре 6B указательный палец 14 входит в контакт с объектом 60. Относительное перемещение кисти 10 и объекта 60 происходит в плоскости Фигур 6A и 6B. В выбранном примере моторизация пальца 14 не позволяет кисти избежать контакта с объектом 60. Различные упругие соединительные элементы 35, 36 и 37 деформируются и позволяют пальцу 14 принимать внешнее давление из-за наличия объекта 60, не подвергаясь повреждению или без необходимости сложного управления роботом, оборудованным кистью.
Изобретение относится к кисти антропоморфного робота. Кисть содержит ладонь и по меньшей мере один палец, шарнирно соединенный с ладонью и содержащий по меньшей мере одну фалангу и шарнирное соединение. Шарнирное соединение соединяет фалангу, проходящую в главном направлении, с ладонью и содержит упругий соединительный элемент, обеспечивающий несколько степеней свободы. Кисть содержит средство моторизации для степени свободы при вращении из степеней свободы, обеспечиваемых соединительным элементом. Причем моторизованная степень свободы при вращении обеспечивает относительное перемещение вокруг оси под прямыми углами к главному направлению фаланги. Другие степени свободы, обеспечиваемые соединительным элементом, не моторизованы. Упругий соединительный элемент имеет нейтральное положение, определенное таким образом, что средство моторизации обеспечивает угловое перемещение шарнирного соединения, содержащего рассматриваемый упругий соединительный элемент, в обе стороны от нейтрального положения. Изобретение обеспечивает упрощение изготовления кисти антропоморфного робота при сохранении ее пригодности для захвата объектов различных форм, а также позволяет улучшить податливость пальца к форме объектов, с которыми он может столкнуться. 10 з.п. ф-лы, 6 ил.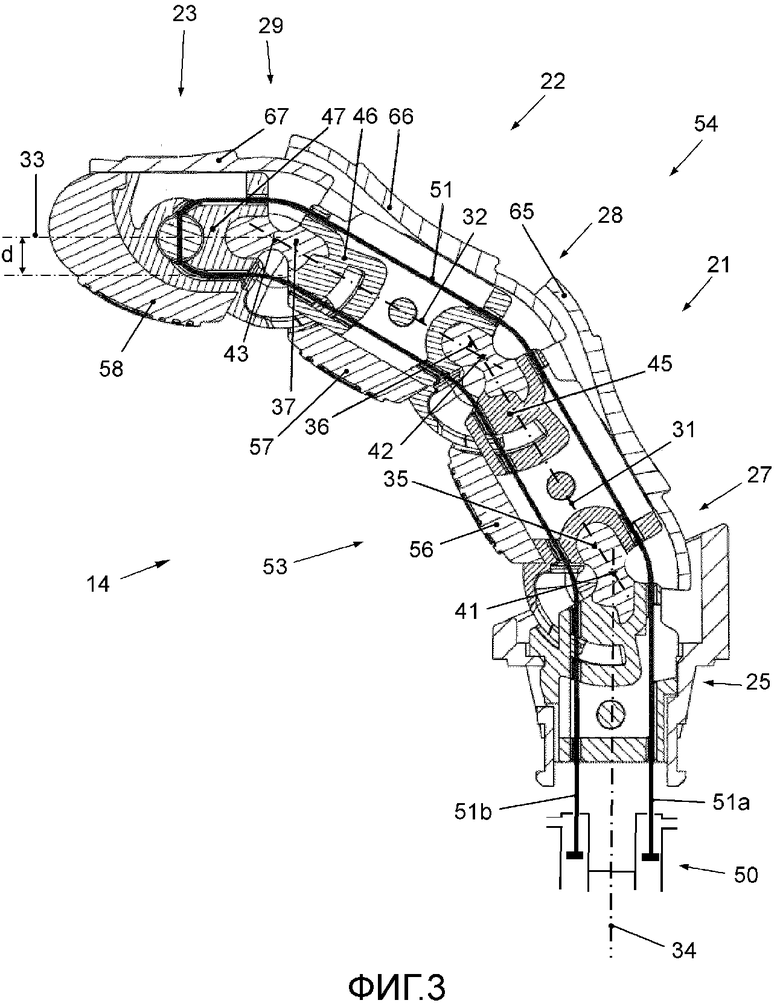
1. Кисть, предназначенная для антропоморфного робота, причем кисть содержит ладонь и по меньшей мере один палец, шарнирно соединенный с ладонью, причем палец содержит по меньшей мере одну фалангу и шарнирное соединение, соединяющее фалангу с ладонью, причем фаланга продолжается в главном направлении, причем шарнирное соединение дополнительно содержит упругий соединительный элемент, обеспечивающий несколько степеней свободы, причем кисть дополнительно содержит средство моторизации для степени свободы при вращении из степеней свободы, обеспечиваемых соединительным элементом, причем моторизованная степень свободы при вращении обеспечивает относительное перемещение вокруг оси под прямыми углами к главному направлению фаланги, в которой другие степени свободы из степеней свободы, обеспечиваемых соединительным элементом, не моторизованы и в которой упругий соединительный элемент имеет нейтральное положение, определенное таким образом, что средство моторизации обеспечивает угловое перемещение шарнирного соединения, содержащего рассматриваемый упругий соединительный элемент, в обе стороны от нейтрального положения.
2. Кисть по п. 1, в которой палец дополнительно содержит несколько последовательных фаланг, причем две последовательные фаланги соединены шарнирным соединением, в которой каждое шарнирное соединение или шарнирные соединения, соединяющие две последовательные фаланги, содержат упругий соединительный элемент, обеспечивающий несколько степеней свободы между двумя последовательными фалангами, в которой кисть содержит средство моторизации для степени свободы при вращении из степеней свободы, обеспечиваемых соединительным элементом, соединяющим последовательные фаланги, причем моторизованная степень свободы при вращении обеспечивает относительное перемещение двух последовательных фаланг вокруг оси под прямыми углами к главному направлению двух последовательных фаланг, в которой другие степени свободы из степеней свободы, обеспечиваемых соединительным элементом, соединяющим последовательные фаланги, не моторизованы и в которой каждый соединительный элемент, соединяющий последовательные фаланги, имеет нейтральное положение, определенное таким образом, что средство моторизации обеспечивает угловое перемещение шарнирного соединения, содержащего рассматриваемый упругий соединительный элемент, в обе стороны от нейтрального положения.
3. Кисть по п. 2, в которой каждый из различных упругих соединительных элементов имеет жесткость, которая уменьшается с расстоянием от ладони.
4. Кисть по п. 2, в которой средство моторизации дополнительно содержит привод, общий для всех шарнирных соединений по меньшей мере одного пальца.
5. Кисть по п. 4, в которой каждая фаланга дополнительно содержит жесткий каркас, причем средство моторизации дополнительно содержит тросик, направляемый в каждом жестком каркасе, причем тросик проходит от одной фаланги к другой на расстоянии от оси моторизованной степени свободы при вращении, и тросик приводится в действие общим приводом.
6. Кисть по п. 5, в которой жесткий каркас образован из двух частей, между которыми направлен тросик.
7. Кисть по п. 4, в которой общий привод представляет собой привод двойного действия.
8. Кисть по п. 1, в которой фаланга дополнительно содержит жесткий каркас и гибкий элемент, расположенный на внутренней поверхности пальца.
9. Кисть по п. 8, в которой фаланга дополнительно содержит кожух, расположенный на внешней поверхности пальца, и в которой кожух и гибкий элемент имеют комплементарные формы, изготовленные так, чтобы выполнять скрепление жесткого каркаса, гибкого элемента и кожуха.
10. Кисть по п. 8, в которой гибкий элемент образован из двух частей, окружающих жесткий каркас.
11. Кисть по п. 8, в которой гибкие элементы и соединительный элемент или элементы изготовлены путем их группирования пополам в продольном направлении.
| WO 2008058061 A2, 15.05.2008 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| KR 20110005146 A, 17.01.2011 | |||
| FR 2965501 B1, 02.08.2013 | |||
| Карусельный станок для формования вибрированием железобетонных изделий | 1938 |
|
SU60891A1 |
| Устройство для захвата | 1974 |
|
SU743678A1 |

