Область техники
Изобретение относится к способу поддержания работы и регулирования частоты часового резонатора во время работы указанного резонатора в пределах его собственной частоты, согласно которому применяют по меньшей мере одно регулирующее устройство, воздействующее на указанный резонатор периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя указанного резонатора с частотой регулирования указанного регулирующего устройства, которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты, при этом указанное целое больше или равно 2 и меньше или равно 10.
Изобретение относится к области часовых механизмов, используемых в механических часах.
Уровень техники
Существует постоянная потребность в улучшении работы часовых механизмов.
Важным ограничением для усовершенствования механических часов является использование обычных импульсных спусковых механизмов, и пока ни одно решение спускового механизма не позволило устранить этот недостаток.
В документе ЕР 1843227 А1, зарегистрированном на имя заявителя, описан спаренный резонатор, включающий в себя первый резонатор низкой частоты, например, порядка нескольких герц, и второй резонатор более высокой частоты, например, порядка килогерца. Изобретение характеризуется тем, что первый резонатор и второй резонатор содержат средства постоянной механической связи, при этом указанная связь позволяет стабилизировать частоту в случае внешних воздействий, например, в случае ударов.
В документе СН 615314 А3, зарегистрированном на имя PATEK PHILIPPE SA, описан подвижный узел регулирования часового механизма, содержащий совершающий колебания баланс, механически удерживаемый спиральной пружиной, и вибрирующий элемент, магнитно-связанный с неподвижным элементом для синхронизации баланса. Баланс и вибрирующий элемент представляют собой единый подвижный вибрирующий и одновременно совершающий колебания элемент. Частота вибрации вибрирующего элемента является целым кратным частоты колебания баланса.
Сущность изобретения
Задачей изобретения является изготовление максимально точного часового механизма.
В связи с этим объектом изобретения является способ поддержания работы и регулирования частоты часового резонатора во время работы указанного резонатора в пределах его собственной частоты, согласно которому применяют по меньшей мере одно регулирующее устройство, воздействующее на указанный резонатор периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя указанного резонатора с частотой регулирования указанного регулирующего устройства, которая составляет от 0,9 до 1,1 целого кратного указанной собственной частоты, при этом указанное целое больше или равно 2 и меньше или равно 10, указанное периодическое движение задает периодическую модуляцию добротности указанного резонатора, действуя на потери и/или на демпфирование и/или на трение указанного резонатора.
Объектом изобретения является также способ поддержания работы и регулирования частоты часового резонатора во время работы указанного резонатора в пределах его собственной частоты, согласно которому применяют по меньшей мере одно регулирующее устройство, воздействующее на указанный резонатор периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя указанного резонатора с частотой регулирования указанного регулирующего устройства, которая составляет от 0,9 до 1,1 целого кратного указанной собственной частоты, при этом указанное целое больше или равно 2 и меньше или равно 10, указанный способ применяют к указанному резонатору, содержащему по меньшей мере один узел пружинного баланса, включающий в себя баланс, и указанную добротность указанного резонатора изменяют посредством возбуждения колебаний, под действием указанного регулирующего устройства, вспомогательных пружинных балансов с сильным остаточным дисбалансом, установленных эксцентрично на указанном балансе.
Объектом изобретения является также способ поддержания работы и регулирования частоты часового резонатора во время работы указанного резонатора в пределах его собственной частоты, согласно которому применяют по меньшей мере одно регулирующее устройство, воздействующее на указанный резонатор периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя указанного резонатора с частотой регулирования указанного регулирующего устройства, которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты, при этом указанное целое больше или равно 2 и меньше или равно 10, указанный способ применяют к указанному резонатору, содержащему кольцо, удерживающее торсионную нить, которая образует упругое возвратное средство указанного резонатора, и указанное регулирующее устройство приводят в действие, задавая периодическое изменение натяжения указанной торсионной нити.
Объектом изобретения является также способ поддержания работы и регулирования частоты часового резонатора во время работы указанного резонатора в пределах его собственной частоты, согласно которому применяют по меньшей мере одно регулирующее устройство, воздействующее на указанный резонатор периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя указанного резонатора с частотой регулирования указанного регулирующего устройства, которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты, при этом указанное целое больше или равно 2 и меньше или равно 10, указанный способ применяют к указанному резонатору, содержащему по меньшей мере один камертон, и указанное регулирующее устройство действует на крепление указанного камертона и/или на подвижный элемент, оказывающий давление по меньшей мере на одну ветвь указанного камертона.
Краткое описание чертежей
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых схематично и частично представлены параметрические генераторы колебаний, соответствующие различным вариантам и версиям осуществления изобретения, и на которых:
фиг. 1 - частичный схематичный вид в плане параметрического резонатора, регулируемого в соответствии с изобретением, который содержит часовой пружинный баланс, образующий резонатор, и инерцию и/или добротность которого модулируют при помощи грузиков, расположенных радиально или тангенциально при помощи пружин и возбуждаемых на частоте, вдвое превышающей частоту резонатора с пружинным балансом, содержащего указанный баланс, пружина которого не показана; этот баланс содержит на своем ободе элементы, вибрирующие в радиальном или тангенциальном направлении во время поворотного движения баланса;
фиг. 2 - частичный схематичный вид в плане баланса, содержащего четыре радиальные пружины, соединенные с ободом и поддерживающие грузики, и подвергающегося возбуждению регулирования на частоте, вдвое превышающей частоту резонатора с пружинным балансом, включающего в себя этот баланс, пружина которого не показана;
фиг. 3 - частичный схематичный вид в плане баланса, содержащего свободно установленные встроенные пружинные балансы, каждый из которых имеет сильный дисбаланс;
фиг. 4 - частичный схематичный вид в плане баланса, подвешенного при помощи двух диаметрально противоположных радиальных пружин, при этом траектория центра тяжести баланса соответствует общему направлению этих двух пружин;
фиг. 5А, 5В, 5С - частичный схематичный вид в плане баланса, содержащего на своем ободе элементы, которые поворачиваются во время поворотного движения баланса;
фиг. 6 - частичный схематичный вид в плане баланса, вблизи которого колодка, образующая аэродинамический тормоз, перемещается с частотой, вдвое превышающей частоту резонатора с пружинным балансом, включающего в себя этот баланс, пружина которого не показана;
фиг. 7 - баланс, аналогичный показанному на фиг. 3, с пружинными балансами с сильными дисбалансами, установленными свободно на одном диаметре и в положении совмещения дисбалансов, отличных (в точке покоя) от дисбалансов, показанных на фиг. 3, и находящихся либо в фазе, либо с чередованием в противофазе;
фиг. 8 - частичный схематичный вид в плане камертона, одна ветвь которого находится в контакте с фрикционной колодкой, возбуждаемой на частоте, вдвое превышающей частоту камертонного резонатора;
фиг. 9 - резонатор, содержащий баланс с кольцом, удерживающим торсионную нить, для которой регулирующее устройство задает периодическое изменение натяжения с частотой, вдвое превышающей частоту резонатора с балансом и с торсионной нитью;
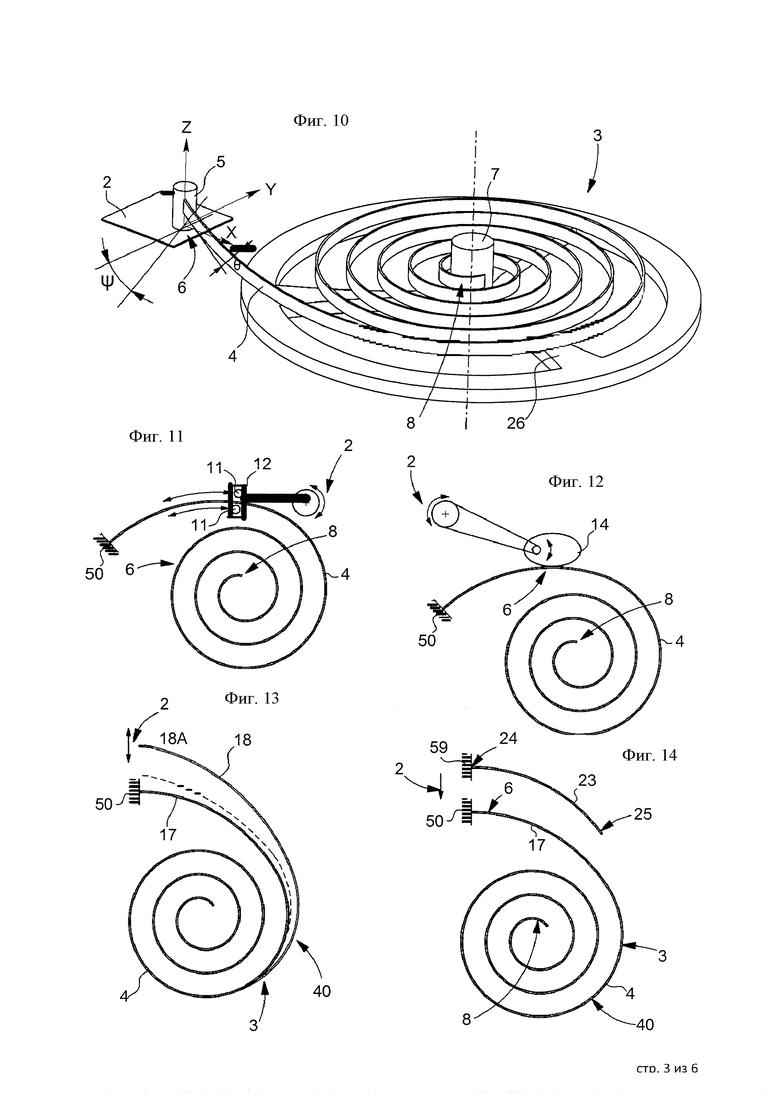
фиг. 10 - схематичный вид регулируемого параметрического резонатора в соответствии с изобретением, содержащего часовой пружинный баланс, в котором наружный виток спиральной пружины закреплен на пальце, которому регулирующее устройство задает периодическое движение, причем этот палец выполнен подвижным с возможностью поступательного движения, поворота и наклона в пространстве для закручивания пружины в случае необходимости;
фиг. 11 - схематичный вид спиральной пружины, оснащенной часовым градусником со штифтами, с кривошипно-шатунной системой для активации непрерывного движения градусника с целью непрерывного изменения активной длины спиральной пружины;
фиг. 12 - схематичный вид спиральной пружины, на которую опирается кулачок для непрерывного изменения активной длины спиральной пружины и/или положения точки соединения и/или геометрии спиральной пружины. Эта фигура представляет собой упрощенное изображение, на котором на спиральную пружину опирается только один кулачок и только с одной стороны; разумеется, можно предусмотреть два кулачка, расположенные таким образом, чтобы зажимать спиральную пружину с двух сторон;
фиг. 13 - частичный схематичный вид спиральной пружины узла пружинного баланса с дополнительным витком, закрепленным на этой пружине и локально образующим подкладку для концевой кривой спиральной пружины, при этом регулирующее устройство воздействует на конец этого дополнительного витка;
фиг. 14 - вид спиральной пружины с другим витком вблизи ее концевой кривой, который удерживается первым концом при помощи опоры, управляемой регулирующим устройством, и который является свободным на втором конце, выполненном с возможностью периодического вхождения в контакт с концевой кривой под действием регулирующего устройства на эту опору;
фиг. 15 - регулирование, которое получается в случае резонатора, показанного на фиг. 2;
фиг. 16А и 16В - изменение центра тяжести резонатора для резонатора с пружинным балансом, содержащего баланс с по существу радиальными пружинами, закрепленными на ободе и поддерживающими колеблющиеся грузики, некоторые из которых расположены внутри, а другие снаружи обода;
фиг. 17А и 17В - вид, аналогичный фиг. 5, другой балансовой системы с лопатками на гибкой поворотной опоре, позволяющей изменять аэродинамические потери и инерцию;
фиг. 18А-18D - модуляция центра тяжести с использованием резонатора, показанного на фиг. 3 или на фиг. 7, содержащего встроенные пружинные балансы;
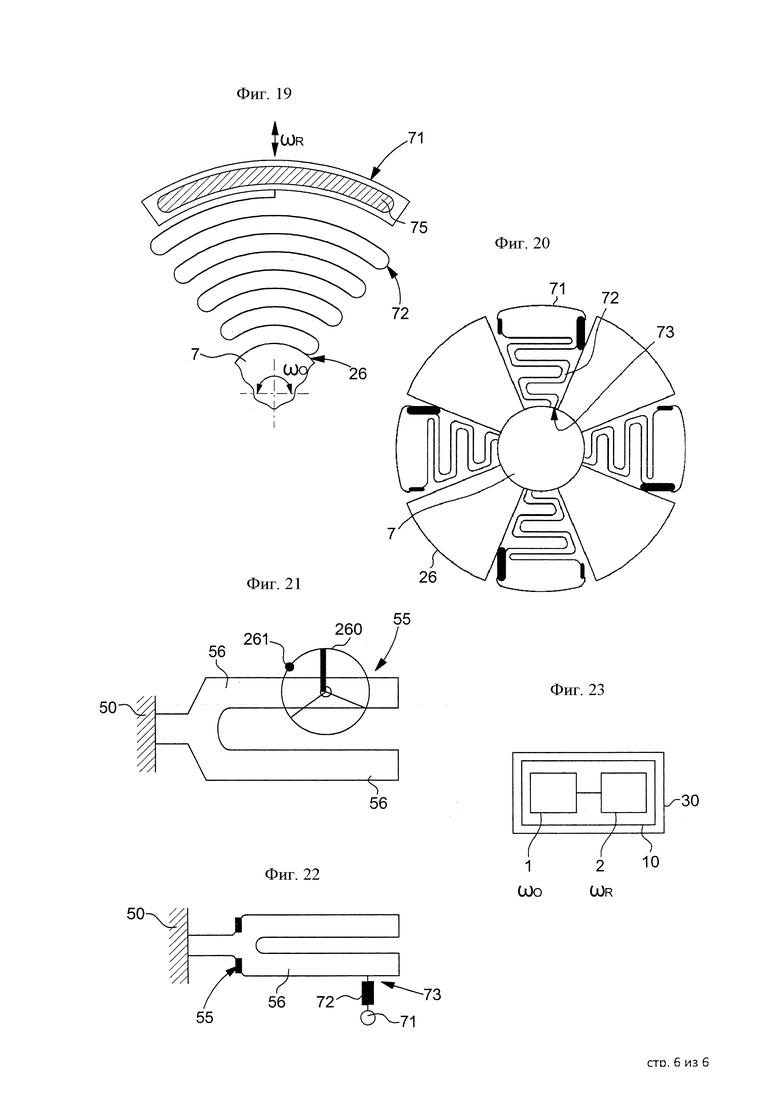
фиг. 19 - пример выполнения параметрического генератора колебаний с балансовым кольцом, на котором установлена пружина из кремния с периферическим грузиком, утяжеленным при помощи слоя золота, при этом узел пружина-грузик колеблется на частоте регулирования ωR;
фиг. 20 - баланс, содержащий узлы пружина-грузик, аналогичные узлу, показанному на фиг. 19;
фиг. 21 - камертон, на одной ветви которого с возможностью свободного крутильного колебания установлен узел вспомогательного пружинного баланса;
фиг. 22 - камертон, на одной ветви которого с возможностью свободной вибрации установлен узел вспомогательного пружинного баланса;
фиг. 23 - блок-схема часов, содержащих механический часовой механизм с резонатором, регулируемым в соответствии с изобретением регулирующим устройством на двойной частоте.
Подробное описание предпочтительных вариантов выполнения
Задачей настоящего изобретения является изготовление часового механизма, который позволяет добиться максимальной точности часового изделия, в частности, механического часового изделия, в частности, механических наручных часов.
Для этого объединяют несколько разных резонаторов либо напрямую, либо через спусковой механизм.
Для решения проблемы нестабильности, связанной со спусковым механизмом, система параметрического резонатора позволяет, в частности, уменьшить влияние этого спускового механизма и повысить, таким образом, точность часов.
Для поддержания колебаний в генераторе колебаний используют параметрическое возбуждение, которое состоит в изменении по меньшей мере одного из параметров генератора колебаний с частотой регулирования ωR.
Условно и для четкого разграничения в данном случае «регулятором» 2 называют генератор колебаний, который служит для поддержания и регулирования частоты другой системы, называемой «резонатором» 1.
Лагранжиан L параметрического резонатора соответствующей размерности выражается как:

где Т обозначает кинетическую энергию, а V - потенциальную энергию, и где инерция I(t), жесткость k(t) и положение покоя x0(t) указанного резонатора являются периодической функцией времени, х является обобщенной координатой резонатора.
Уравнение возбуждаемого и демпфируемого резонатора получают при помощи уравнения Лагранжа для лагранжиана L с добавлением возбуждающей функции и силы Ланжевена и с учетом рассеивающих механизмов:

где коэффициент производной первого порядка по х равен:
 ,
,
β(t)>0 является параметром, описывающим потери,
и где коэффициент члена нулевого порядка зависит от частоты резонатора:
 .
.
Функция f(t) принимает значение 0 в случае не возбуждаемого генератора колебаний. Эта функция f(t) может быть также периодической функцией или функцией, отображающей импульс Дирака.
Согласно изобретению, при помощи действия поддерживающего генератора колебаний, называемого регулятором, изменяют один и/или другой или все параметры β(t), k(t), I(t), x0(t) с частотой регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного, в частности, двойной собственной частоты ω0 регулируемой системы генерирования колебаний.
Чтобы понять это явление, можно обратиться к примеру маятника, в котором изменяют длину. Уравнение демпфируемого генератора колебаний имеет следующий вид:

где член первого порядка по х является параметром потерь, где член нулевого порядка является параметром частоты резонатора и где x0(t) соответствует положению покоя резонатора.
Функция f(t) принимает значение 0 в случае не возбуждаемого генератора колебаний. Эта функция f(t) может быть также периодической функцией или функцией, отображающей импульс Дирака.
Согласно изобретению, при помощи действия поддерживающего генератора колебаний или регулятора 2 изменяют один и/или другой или все параметры β(t), k(t), I(t), x0(t) с частотой регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного, причем это целое превышает или равно 2, в частности равно 2, собственной частоты ω0 регулируемой системы генерирования колебаний, в данном случае резонатора 1. В частном варианте осуществления частота регулирования ωR составляет от 2,2 до 2.2 собственной частоты ω0, и, в частности, частота регулирования ωR вдвое превышает собственную частоту ω0.
Предпочтительно один или несколько параметров или все параметры β(t), k(t), I(t), x0(t) меняются с определенной таким образом частотой регулирования ωR, которая предпочтительно является целым кратным, в частности, вдвое превышает собственную частоту ω0 регулируемой системы резонатора 1.
Как правило, кроме модуляции параметрических членов, поддерживающий генератор колебаний или регулятор использует непараметрический поддерживающий член f(t), амплитуда которого является ничтожной после достижения параметрического режима [W.B.Case, The pumping of a swing from the standing position. Am J. Phys. 64, 215 (1996)].
В варианте возбуждающую функцию f(t) можно вводить при помощи второго поддерживающего механизма.
Поддерживающий генератор колебаний или регулятор 2 позволяет также изменять член f(t), если он не является нулевым.
В примере не возбуждаемого демпфируемого генератора колебаний и в случае, когда х0 является константой, параметры уравнения сводятся к параметру частоты ω и к параметру потерь β, в частности, потерь от механического трения, или аэродинамических потерь, или внутренних потерь, или других потерь.
Добротность генератора колебаний определяют как Q=ω/β.
Чтобы лучше понять явление, можно обратиться к примеру маятника, в котором изменяют длину. В этом случае:
 ,
,
где L - длина маятника, а g - действие силы тяжести.
В данном частном примере маятника, если длину L модулировать во времени периодически с частотой 2ω и с достаточной амплитудой модуляции δL (δL/L>2δ/ω), система колеблется с частотой ω, но не демпфируется.
[D. Rugar et P. Grutter, Mechanical parametric amplification and thermomechanical noise squeezing, RPL 67, 6999 (1991), A. H. Nayfeh and D. T. Mook, Nonlinear Oscillations, Wiley-Interscience, (1977)].
Член нулевого порядка может также принимать вид ω2(A,t), где А является амплитудой колебания.
Таким образом, изобретение относится к способу и к системе поддержания работы и регулирования частоты часового резонатора 1 в диапазоне его собственной частоты ω0. Согласно этому способу, применяют по меньшей мере одно регулирующее устройство 2, действующее на резонатор 1 периодическим движением.
В частности, применяют по меньшей мере одно регулирующее устройство 1, сообщающее периодическое движение по меньшей мере одному внутреннему компоненту резонатора 1 или наружному компоненту, оказывающему влияние на такой внутренний компонент, такое как аэродинамическое влияние или торможение, или модулирующее магнитное или электростатическое или электромагнитное или аналогичное поле, действующее так называемым возвратным усилием (в данном случае его следует рассматривать в широком смысле: усилие притяжения или отталкивания) на такой внутренний компонент резонатора 1.
Это периодическое движение приводит к периодической модуляцию резонансной частоты и/или добротности и/или положения покоя резонатора 1 с частотой регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое превышает или равно 2 и меньше или равно 10.
Что касается добротности, конструкторы часов стремятся к ее максимальному увеличению. Эта добротность зависит от архитектуры резонатора, а также от всех параметров его хода, в частности, от собственной частоты, и зависит также от рабочей окружающей среды резонатора. Первым концептуальным подходом может быть установление добротности на постоянном значении, как только это значение, смоделированное и проверенное экспериментальным путем, считают достаточным. Хотя этот первый подход и кажется надежным, он оказывается плохо адаптированным к работе крутильно-колебательного типа резонаторов, используемых в часах, и, в частности, представляется нереальным, что касается зон изменения направления на обратное или разворотов.
Поэтому изобретение следует второму подходу, который учитывает явления, связанные с крутильно-колебательной работой. Согласно изобретению, периодическое движение задает периодическую модуляцию добротности резонатора 1, влияя на потери и/или на демпфирование и/или на трение резонатора 1.
Понятно, что в случае резонатора типа пружинного баланса, даже если нет возможности воздействовать на сам баланс, это не исключает возможности влиять на окружающую его среду или на положение крутильного колебания (особенно в случае виртуальных крутильных колебаний) для модуляции момента аэродинамического торможения и, следовательно, добротности.
В частном варианте выполнения периодическое движение задает периодическую модуляцию добротности резонатора 1, действуя на аэродинамические потери резонатора 1, посредством деформации резонатора и/или изменения окружающей среды вокруг резонатора 1.
Что касается окружающей среды резонатора, понятно, что контекст резонатора, который содержит элементы, совершающие крутильно-колебательные движения и колеблющиеся вокруг среднего положения, полностью отличается от случая регулятора скорости, который, как правило, действует только в одном направлении. Кроме того, в рамках изобретения в данном случае речь идет о регулировании частоты, а не скорости, что предполагает точность регулирования абсолютно другого порядка величины: если точность порядка 10-2 является достаточной для регулятора часового механизма боя с грузиками и/или тормозными лопатками, она не подходит для резонатора, предназначенного для обеспечения постоянства хода часового механизма, и в этом последнем случае необходимо предусматривать точность порядка 10-5 для получения суточного отклонения порядка одной секунды.
В частной версии выполнения периодическое движение задает периодическую модуляцию добротности резонатора 1, модулируя внутреннее демпфирование упругих возвратных средств, входящих в состав резонатора 1.
В частной версии выполнения периодическое движение задает периодическую модуляцию добротности резонатора 1, модулируя механическое трение внутри резонатора 1.
В первом частном варианте осуществления изобретения это периодическое движение задает периодическую модуляцию по меньшей мере резонансной частоты резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
Во втором частном варианте осуществления изобретения это периодическое движение задает периодическую модуляцию по меньшей мере добротности резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
В третьем частном варианте осуществления изобретения это периодическое движение задает периодическую модуляцию по меньшей мере точки покоя резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
Естественно, другие частные варианты осуществления изобретения допускают комбинации этих первого, второго и третьего вариантов.
Так, в четвертом частном варианте осуществления изобретения, представляющем собой комбинацию первого и второго вариантов, это периодическое движение задает периодическую модуляцию по меньшей мере резонансной частоты и добротности резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
В пятом частном варианте осуществления изобретения, представляющем собой комбинацию второго и третьего вариантов, это периодическое движение задает периодическую модуляцию по меньшей мере добротности и точки покоя резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
В шестом частном варианте осуществления изобретения, представляющем собой комбинацию первого и третьего вариантов, это периодическое движение задает периодическую модуляцию по меньшей мере резонансной частоты и точки покоя резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
В седьмом частном варианте осуществления изобретения, представляющем собой комбинацию первого, второго и третьего вариантов, это периодическое движение задает периодическую модуляцию по меньшей мере резонансной частоты, добротности и точки покоя резонатора 1 при помощи такой частоты регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0, причем это целое больше или равно 2 и меньше или равно 10.
В частной версии этих различных частных вариантов осуществления способа все модуляции происходят либо с одной частотой ωR, либо с кратными друг другу частотами ωR.
Рассмотрим более подробно три первых главных варианта осуществления изобретения.
В частной версии первого варианта изобретения это периодическое движение задает периодическую модуляцию резонансной частоты резонатора 1, действуя на жесткость и/или на инерцию резонатора 1. В частности, это периодическое движение задает периодическую модуляцию резонансной частоты резонатора 1, задавая одновременно модуляцию жесткости резонатора 1 и модуляцию инерции резонатора 1.
Различные предпочтительные версии допускают различные средства осуществления изобретения в этом первом варианте.
В первой версии первого варианта это периодическое движение задает периодическую модуляцию резонансной частоты резонатора 1, задавая модуляцию инерции резонатора 1 посредством модуляции распределения массы резонатора 1 и/или посредством деформации резонатора 1 (показанного на фиг. 1, 2 и 3), и/или посредством модуляции положения центра тяжести резонатора 1, как показано, например, на фиг. 4.
В этой же первой версии первого варианта на фиг. 16А и 16В тоже представлено изменение центра тяжести резонатора, а также его инерции.
В этой же первой версии первого варианта на фиг. 18А-18D представлено изменение центра тяжести на основе резонатора, показанного на фиг. 3 или на фиг. 7. Такая система содержит встроенные вспомогательные пружинные балансы 260. Предпочтительно эти вспомогательные пружинные балансы 260 заменены на системы без осей, то есть на системы с гибкими направляющими, тем более что амплитуда их колебаний не обязательно должна быть большой. В этом случае изменяется только инерция главного пружинного баланса. В зависимости от углового положения дисбалансов малых пружинных балансов можно создать систему с модулируемым центром тяжести.
Предпочтительно такая модуляция положения центра тяжести представляет собой динамическую модуляцию, влияющую на один или несколько компонентов резонатора 1. Модуляцию инерции можно осуществлять посредством изменения формы, изменения массы или изменения центра тяжести резонатора относительно его центра вращения, например, с использованием гибкого баланса. Здесь тоже можно применить встроенные балансы, как показано на фиг. 7, где дисбалансы находятся либо в фазе, либо поочередно в противофазе.
Во второй версии первого варианта это периодическое движение задает периодическую модуляцию резонансной частоты резонатора 1, задавая модуляцию жесткости упругого возвратного средства, входящего в состав резонатора 1, или модуляцию возвратного усилия, создаваемого магнитным или электростатическим или электромагнитным полем внутри резонатора 1. В частности, в этой второй версии периодическое движение задает периодическую модуляцию резонансной частоты резонатора 1, задавая модуляцию активной длины пружины, входящей в состав резонатора 1 (как показано на фиг. 11 и 12), или модуляцию сечения пружины, которая входит в состав резонатора 1 (как показано на фиг. 13 и 14), или модуляцию модуля упругости упругого возвратного средства, входящего в состав резонатора 1, или модуляцию формы упругого возвратного средства, входящего в состав резонатора 1. Модуляцию модуля упругости компонента резонатора 1 можно получить при помощи пьезоэлектрической системы, электрического поля (электроды), посредством периодического локального нагрева под действием магнитного поля, приводящего к расширению специальных сплавов, при помощи оптомеханических резонансных систем, посредством кручения или скручивания, в частности, для материалов с запоминанием формы.
В третьей версии первого варианта, являющейся результатом комбинации с третьим вариантом изобретения, периодическое движение задает периодическую модуляцию резонансной частоты резонатора 1, задавая одновременно модуляцию жесткости резонатора 1 и модуляцию положения точки покоя резонатора 1.
Для воздействия на жесткость предпочтительно можно использовать явления магнитострикции, периодически изменяя жесткость за счет воздействия на компонент резонатора 1, выполненный из соответствующего материала, магнитным полем (внутреннее намагничивание и/или внешнее поле), или за счет ударного воздействия.
Для воздействия на модуль упругости можно тоже использовать явление магнитострикции, а также применять периодическое повышение температуры к компонентам с запоминанием формы, пьезоэлектрический эффект или получение нелинейных режимов путем создания специальных напряжений.
В частной версии второго варианта изобретения это периодическое движение задает периодическую модуляцию добротности резонатора 1, воздействуя на потери и/или на демпфирование и/или на трение резонатора 1. В частности, можно воздействовать разными способами:
- в первой версии этого второго варианта периодическое движение задает периодическую модуляцию добротности резонатора 1, воздействуя на аэродинамические потери резонатора 1 посредством деформации резонатора 1 (как показано на фиг. 5, на баланс, оснащенный поворотными лопатками, или как показано на фиг. 17) и/или посредством изменения окружающей среды вокруг резонатора (как показано на фиг. 6, где колодка, которой сообщают периодическое движение, изменяет циркуляцию воздуха вокруг баланса);
- во второй версии этого второго варианта периодическое движение задает периодическую модуляцию добротности резонатора 1, модулируя внутреннее демпфирование упругих возвратных средств, входящих в состав резонатора 1, например, при помощи циркуляции жидкости в полом корпусе (например, спиральной пружины или баланса из узла пружинного баланса) или под действием кручения, периодически применяемого для спиральной пружины или аналогичного элемента, что приводит одновременно к наведенным изменениям жесткости и демпфирования резонатора, содержащего эту пружину. В частном случае можно изменять внутренние потери, не изменяя жесткость: одну пружину заменяют двумя пружинами с эквивалентной общей жесткостью, при этом внутренние потери становятся больше; в частности, можно установить последовательно или параллельно, в зависимости от случая, две пружины, одна из которых может быть предварительно напряжена. Другим средством изменения потерь с сохранением одинаковой жесткости является применение на пружине либо термической компенсации путем легирования кремния, либо термоупругого эффекта с теплопередачей между двумя разными частями витка пружины.
- в третьей версии этого второго варианта периодическое движение задает периодическую модуляцию добротности резонатора 1, модулируя механическое трение внутри резонатора 1, с использованием эффекта, аналогичного виртуальному увеличению тяжести. Пример представлен на фиг. 8, где трущаяся пластинка модулируемо взаимодействует с ветвью камертона.
В частной версии осуществления третьего варианта изобретения, это периодическое движение задает периодическую модуляцию точки покоя резонатора 1 посредством модуляции положения крепления резонатора 1 и/или посредством модуляции равновесия между возвратными силами, действующими на резонатор 1. Модуляция положения крепления резонатора 1 может происходить по меньшей мере на одной точке крепления этого резонатора. Например, на резонаторе 1 с пружинным балансом 3 можно воздействовать на палец и/или на кольцо 7 крепления спиральной пружины 4 по меньшей мере на одной точке крутильного колебания путем действия на противоударные элементы цапф. Для этого можно применять некоторые функции движения, например, в классическом спусковом механизме удары анкерных элементов по пружинам, или аналогичные функции.
- в частности, в первой версии этого третьего варианта периодическое движение задает периодическую модуляцию точки покоя резонатора 1 посредством модуляции равновесия между возвратными силами, действующими на механизм резонатора 1 со стороны механических упругих возвратных средств или магнитных возвратных средств и/или электростатических возвратных средств. Для модуляции этого равновесия самым простым способом является воздействие на резонатор несколькими возвратными силами разного происхождения, из которых достаточно модулировать во времени по меньшей мере одну по интенсивности и/или по направлению. Эти силы не обязательно имеют одинаковую природу, некоторые могут быть механическими (пружины), а другие связаны с приложением поля. Частным примером является случай пружинного баланса 3 с двумя спиральными пружинами, когда модуляции положения одного из пальцев достаточно, чтобы изменить равновесие. Скручивание спиральной пружины под углом Ψ, как показано на фиг. 10, является хорошим способом изменения баланса сил, действующих на резонатор 1, и, следовательно, модуляции их равновесия. В связи с этим следует отметить, что для пальца можно применять шесть степеней свободы, при этом на фигуре показан упрощенный случай, в частности, предпочтительным может быть вращение вокруг оси Z;
- во второй версии этого третьего варианта комбинируют модуляцию положения точки покоя с модуляцией жесткости согласно первому варианту: действительно, часто при изменении равновесия сил меняется также общая жесткость. Действие модуляции на точку покоя комбинируют при этом с действием модуляции жесткости.
Предпочтительно, когда компонент, на котором можно модулировать жесткость, состоит из нескольких элементов, модуляцию осуществляют по меньшей мере на одном из этих элементов.
В другом варианте осуществления изобретения периодическое движение задает периодическую модуляцию добротности резонатора 1, и, согласно изобретению, периодическое движение на одинаковой частоте регулирования ωR сообщают одновременно компоненту резонатора и механизму генерирования потерь по меньшей мере на одном компоненте резонатора 1.
В еще одном варианте осуществления изобретения, совместимом с каждым из вышеупомянутых вариантов, регулирующий механизм 2 задает периодическое изменение частоты резонатора 1 с относительной амплитудой, превышающей обратную величину добротности резонатора 1.
В рамках простого в реализации варианта изобретения такое регулирующее устройство 2 действует по меньшей мере на одно крепление резонатора 1.
Что касается частоты ωR, если предположить, что периодическую модуляцию каждой из различных характеристик - резонансной частоты, добротности, точки покоя - осуществляют с разными кратными частоты ω0 (например, модуляцию жесткости с двойной базовой частотой и модуляцию добротности с учетверенной базовой частотой), это не дает особых преимуществ, так как максимум эффекта и стабильности параметрического усиления достигают, когда частота вдвое превышает базовую частоту. Кроме того, далеко не всегда можно представить систему, в которой каждую характеристику можно модулировать разными способами, если только не предусмотреть несколько регуляторов 2, что приводит к усложнению системы. Поэтому предпочтительно модуляцию всех параметров производят на одной частоте ωR.
Можно предусмотреть разные случаи применения изобретения.
В классическом варианте применения изобретение применяют для резонатора 1, содержащего по меньшей мере одно упругое возвратное средство 40, и такое регулирующее устройство 2 действует, задавая периодическое изменение частоты резонатора 1 и/или добротности этого резонатора 1.
В варианте, обычно применяемом в часовом деле, изобретение применяют для резонатора 1, содержащего по меньшей мере один узел пружинного баланса 3, включающий в себя баланс 26 по меньшей мере с одной спиральной пружиной 4 в качестве упругого возвратного средства 40. В частности, как показано на фиг. 3, изменяют инерцию и добротность резонатора 1 за счет создания регулирующим устройством 2 колебаний вспомогательных пружинных балансов 260 с сильными остаточными дисбалансами 261, эксцентрично установленных на балансе 26 и колеблющихся в зависимости от скорости резонатора 1.
В другом варианте применения для узла пружинного баланса 3, содержащего баланс 26 по меньшей мере с одной спиральной пружиной 4 в качестве упругого возвратного средства 40, добротность резонатора 1 изменяют путем изменения трения баланса 26 в воздухе, которого достигают за счет локального изменения геометрии баланса 26 под действием регулирующего устройства 2, и в данном случае устройство находится на балансе 26. Например, как показано на фиг. 5, баланс 26 может содержать модулирующие лопатки (которые следует отличать от тормозных лопаток, которые могут входить в состав простого регулятора скорости, как было указано выше), в частности, модулирующие лопатки с профилем в виде крыла самолета, шарнирно установленные на периферии этого баланса 26, в частности, при помощи гибких направляющих или аналогичных средств, причем эти лопатки предпочтительно являются реверсивными и могут поворачиваться полностью в направлении движения. Предпочтительно эти лопатки удерживаются гибкими пластинками. Когда скорость является промежуточной, эти лопатки находятся близко к ободу, как показано на фиг. 5А. Когда скорость является максимальной, как показано на фиг. 5В, аэродинамический эффект заставляет их приподниматься (эффект крыла самолета), во время разворота лопатки переходят на другую сторону, как показано на фиг. 5С. В этом примере инерцию изменяют с частотой, которая в четыре раза превышает собственную частоту резонатора с пружинным балансом. Таким образом, получают трение воздуха типа воздушного тормоза со щитком на периферии баланса, оказывающее влияние на добротность и/или на инерцию. Этот щиток может быть установлен с возможностью свободного поворота или может быть установлен с возможностью поворота и подвергаться возвратному усилию спиральной пружины или может поворачиваться при помощи гибких направляющих или аналогичных средств. В варианте можно предусмотреть обод баланса с изменяющейся геометрией. В таком варианте добротность резонатора 1 изменяют путем изменения трения баланса 26 в воздухе, происходящего при локальном изменении геометрии этого баланса 26 под действием регулирующего устройства 2. Следует отметить, что регулятор 2 может двигаться независимо от скорости регулятора 1. В частном варианте эту версию комбинируют с предыдущей версией возбуждения колебаний эксцентричных пружинных балансов 260.
В другой версии, в которой воздействуют не на сам баланс, а на окружающую его среду, добротность резонатора 1 изменяют посредством изменения трений баланса 26 в воздухе, происходящего при локальном изменении геометрии окружающей среды вокруг баланса 26 под действием регулирующего устройства 2, как показано на фиг. 6, где приводимая в периодическое движение колодка изменяет циркуляцию воздуха вокруг баланса.
Изобретение можно также применять для резонаторов 1 без механических возвратных средств. Так, в не показанных частных вариантах применения периодическое движение регулирующего устройства 2 задает периодическую модуляцию частоты и/или добротности и/или точки покоя резонатора 1 дистанционно при помощи электрической или магнитной или электромагнитной силы.
Другой вариант применения изобретения, показанный на фиг. 9, относится к резонатору 1, содержащему по меньшей мере один баланс 26 с кольцом 7, удерживающим торсионную нить 46, которая образует упругое возвратное средство 40, при этом приводят в действие по меньшей мере одно регулирующее устройство 2, которое задает периодическое изменение натяжения торсионной нити 46. В аналогичном варианте торсионную нить заменяют гибкой направляющей.
Еще один вариант применения изобретения, показанный на фиг. 8, относится к резонатору 1, содержащему по меньшей мере один камертон, при этом приводят в действие по меньшей мере одно регулирующее устройство 2, которое задает периодическое изменение частоты резонатора 1 и/или жесткости по меньшей мере одной ветви камертона, определяющей добротность резонатора 1. В частности, регулирующее устройство 2 может воздействовать на крепление камертона и/или на подвижный элемент, оказывающий давление по меньшей мере на одну ветвь камертона. Следует отметить, что такой камертон не обязательно должен иметь классическую форму вилки и среди всех прочих форм может принимать форму сердца или форму Н.
В варианте изобретение можно применять к резонатору с одной ветвью или к резонатору, работающему на кручение или на удлинение.
Предпочтительно изобретение позволяет использовать регулирующее устройство 2 для запуска и/или поддержания работы резонатора 1. Предпочтительно это регулирующее устройство 2 взаимодействует с механизмом запуска и/или поддержания работы резонатора 1 для увеличения амплитуды колебания резонатора 1.
Предпочтительно изобретение может обеспечивать комбинированное поддержание работы: стандартное поддержание с низким потреблением в комбинации с параметрическим способом для поддержания колебания. Регулирующее устройство 2 используют для непрерывного поддержания работы резонатора 1 отдельно или во взаимодействии с импульсным механизмом запуска и/или поддержания работы.
Например, такое поддержание работы можно получить с системой пружинного баланса, включающей в себя баланс, содержащий на своем ободе пружины с колеблющимися грузиками в конфигурации, показанной на фиг. 2. При этом анкерный или аналогичный спусковой механизм позволяет возбуждать колебания баланса и грузиков. Пружины и грузики колеблются с частотой, в данном случае вдвое превышающей собственную частоту пружинного баланса. Грузики колеблются за счет инерциальной связи. Параметрический эффект действительно имеет место, поскольку инерция баланса меняется на частоте, вдвое превышающей частоту пружинного баланса. На фиг. 15 показано регулирование, получаемое при таком резонаторе. Следует отметить, что в этом случае меняются также аэродинамические потери.
В другом примере используют спусковой механизм с собачкой, обеспечивающий также отсчет, во взаимодействии с регулирующим механизмом 2, действующим на жесткость спиральной пружины (с перемещающимися штифтами).
Изобретение относится также к часовому механизму 10, содержащему по меньшей мере один резонатор 1. Согласно изобретению, этот часовой механизм содержит по меньшей мере одно такое регулирующее устройство 2, выполненное с возможностью воздействия на резонатор 1, задавая периодическую модуляцию одной или нескольких физических характеристик резонатора 1, - резонансной частоты и/иди добротности и/или точки покоя, - с частотой регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0 резонатора, причем это целое превышает или равно 2 и меньше или равно 10.
В варианте это регулирующее устройство 2 выполнено с возможностью воздействия на резонатор 1, сообщая ему напрямую периодическое движение с такой частотой регулирования ωR.
В варианте это регулирующее устройство 2 действует по меньшей мере на одно крепление резонатора и/или на частоту, в частности, на жесткость и/или инерцию резонатора 1, и/или на добротность резонатора 1, и/или на потери или трения резонатора 1.
В варианте это регулирующее устройство 2 действует на резонатор 1, сообщая периодическое движение компоненту резонатора 1 и/или механизму генерирования потерь по меньшей мере на одном компоненте резонатора 1.
Изобретение относится также к часовому изделию 30, содержащему по меньшей мере один такой часовой механизм 10.
Несколько представленных здесь примеров параметрических генераторов колебаний не являются ограничительными. Некоторые из них, например, показанные на фиг. 15-18, можно напрямую применять в существующих часовых механизмах вместо стандартных компонентов, таких как балансы, что является преимуществом, так как это не вынуждает изменять концепцию и изготовление механических компонентов соответствующего часового механизма.
Одним из преимуществ этих систем является возможность работы пружинного баланса на высокой частоте, несмотря на неизбежное снижение КПД спускового механизма.
Наиболее простой принцип заключается в возбуждении колебания части баланса. Эти колебания (на частоте, кратной n≥2 собственной частоты пружинного баланса) изменяют либо инерцию, либо центр тяжести, либо аэродинамические потери.
На фигурах представлены простые не ограничительные примеры выполнения изобретения. Некоторые можно применять очень просто, например, путем замены стандартного баланса специальным балансом.
Эти примеры показывают, что составные элементы регулятора 2 можно встроить в некоторые компоненты резонатора 1. Во многих случаях изобретение не требует вспомогательного контура возбуждения, поскольку именно определение размерности компонентов регулятора позволяет ему колебаться на определенной частоте ωR, связанной особым отношением с собственной частотой ω0 резонатора 1.
На фиг. 1 представлен заявленный регулируемый параметрический резонатор 1, содержащий пружинный баланс 3 с балансом 26 и не показанной спиральной пружиной, образующий резонатор. Инерцию и/или добротность модулируют при помощи грузиков 71, расположенных радиально или тангенциально через посредство пружин 72, причем последние закреплены в точках 73 соединения с конструкцией баланса, в частности, с его ободом. Эти узлы грузик-пружина возбуждаются на частоте, вдвое превышающей частоту ω0 резонатора 1 с пружинным балансом 3. В данном случае резонатор 1 содержит элементы регулятора 2, представляющие собой узлы грузик-пружина, которые вибрируют в радиальном и/или тангенциальном направлении во время крутильно-колебательного движения баланса 26. В частности, некоторые из них могут направляться дорожкой 74, которую содержит баланс 26. Радиальная вибрация грузиков влияет на инерцию и параметр трения, тангенциальная вибрация влияет на динамическую инерцию. В данном случае баланс 26 содержит стойки 85 с вибрирующими пластинками 84, которые колеблются в основном в радиальном направлении. Для обеспечения эффективности такого регулятора 2 предпочтительно пружины 72 имеют большой объем по сравнению с балансом, и их радиальная протяженность, например, приблизительно равна радиусу обода самого баланса и даже больше, например, радиальная протяженность пружины 72 и грузика 71 эквивалентна четырехкратному радиусу кольца 7.
Предпочтительно во всех примерах все вибрационные узлы, которые входят в состав регулятора, колеблются на одинаковой частоте ωR, определяемой настоящим изобретением. Некоторые из них могут колебаться с частотой, являющейся целым кратным частоты ωR, определяемой в рамках изобретения относительно собственной частоты ω0.
На фиг. 2 тоже показан резонатор 1 с пружинным балансом 3, в котором баланс 26 содержит элементы регулятора 2: четыре радиальные пружины 72, которые соединены с ободом в точках 74 и на которых установлены грузики 71, на них действует регулирующее возбуждение с частотой, вдвое превышающей частоту ω0 резонатора 1. Фиг.15 иллюстрирует регулирование, получаемое в случае такого резонатора.
На фиг. 3 представлено очень простое решение замены существующего баланса резонатором 1, аналогичным показанному на фиг. 1 и 2 и содержащим баланс 26 с встроенными вспомогательными пружинными балансами 260, каждый из которых имеет дисбаланс 261 и установлен с возможностью свободного вращения. При этом можно указать два варианта выполнения:
- вспомогательные пружинные балансы 260 полностью свободны во вращении без ограничения амплитуды, например, с классическим механическим крутильным колебанием;
- вспомогательные пружинные балансы 260 ограничены по амплитуде и выполнены, например, моноблочно с балансом 26 из кремния или аналогичного материала с гибкой цапфой, то есть, с ограниченной амплитудой.
На фиг. 4 представлен резонатор 1, аналогичный показанным на предыдущих фигурах, с балансом 26, подвешенным на одной или нескольких конструкциях 50 при помощи двух по существу диаметрально противоположных радиальных пружин, при этом траектория центра тяжести баланса 26 соответствует общему направлению этих двух пружин 51. В варианте ось баланса удерживается пружинами. В другом варианте баланс 26 поворачивается не на классическом валике, а при помощи гибких направляющих; при этом виртуальная ось баланса определена направлением пружин. Фигура специально представлена в упрощенном виде только с двумя пружинами, но, естественно, баланс 26 можно подвесить между тремя и более пружинами 51. Возможно моноблочное выполнение всего этого узла в пределах амплитуды крутильного колебания, необходимой для баланса 26. Понятно, что возможно многоуровневое выполнение для распределения функциональных компонентов в разных плоскостях.
На фиг. 5А, 5В, 5С тоже показан аналогичный резонатор 1, включающий в себя баланс 26, на ободе которого находятся лопатки 60 с аэродинамическим профилем, шарнирно установленные на уровне гибких цапф 81 на ободе баланса 26 и поворачивающиеся во время крутильно-колебательного движения баланса 26, как было указано выше. Эта конфигурация может быть предусмотрена для работы в вакууме с частотой регулирования лопаток, вдвое превышающей собственную частоту ω0, или в воздухе, с частотой, в четыре раза превышающей ω0.
На фиг. 6 показан резонатор 1 с балансом 26. В данном случае регулятор 2 полностью отделен от резонатора 1: колодка 82 вблизи обода баланса 26, выполняющая функцию аэродинамического тормоза, подвешена при помощи пружины 83 к конструкции 50 и является подвижной на частоте, вдвое превышающей частоту резонатора 1 с пружинным балансом, включающего в себя этот баланс. Эта подвижность может быть обеспечена внешним источником возбуждения и может быть также получена, благодаря профилю, например, зубчатому профилю обода баланса, который создает изменение воздушного потока вблизи колодки 82.
На фиг. 7 представлен баланс, аналогичный балансу на фиг. 3, с двумя вспомогательными пружинными балансами 260 с сильным дисбалансом 261, установленными свободно на одном диаметре и в положении створа дисбалансов, отличными (в точке покоя) от показанных на фиг. 3. Предпочтительно для выполнения этого варианта используют кремний или другой аналогичный материал, поддающийся микрообработке (в частности, оксид кремния, кварц “LIGA”®, аморфный металл или аналогичные материалы): вспомогательные пружинные балансы и их дисбалансы 261 являются моноблочными с балансом 26, относительно которого они поворачиваются при помощи гибких соединений, и положение створа дисбалансов соответствует состоянию покоя этой конструкции. Такой баланс тоже представляет собой решение очень легкой замены существующего баланса для улучшения хронометрических характеристик.
На фиг. 8 показан резонатор с камертоном 55, закрепленным на конструкции 50, одна ветвь 56 которого входит в контакт с фрикционной колодкой 57, возбуждаемой на частоте, вдвое превышающей частоту резонатора 1 с камертоном.
На фиг. 9 показан резонатор, который включает в себя баланс 26, содержащий кольцо 7, удерживающее торсионную нить 46, и в котором регулирующее устройство задает периодическое изменение натяжения с частотой, вдвое превышающей частоту резонатора 1 с балансом и с торсионной нитью.
На фиг. 10 показан параметрический резонатор 1, содержащий пружинный баланс 3, в котором наружный виток 6 спиральной пружины 4 закреплен на пальце 5, которому регулирующее устройство 2 задает периодическое движение, причем этот палец 5 выполнен подвижным с возможностью поступательного движения, поворотного движения и наклона в пространстве для закручивания спиральной пружины 4 в случае необходимости.
На фиг. 11 показан другой резонатор 1 с пружинным балансом 3, в котором спиральная пружина 4 оснащена механизмом с часовым градусником 12 с штифтами 11, с регулирующей шатунно-кривошипной системой 2 для активации непрерывного перемещения градусника 12 с целью непрерывного изменения активной длины спиральной пружины 4.
На фиг. 12 аналогично показана спиральная пружина 4, на которую опирается кулачок 14, приводимый во вращение регулятором 2 для непрерывного изменения активной длины спиральной пружины 4 и/или положения точки соединения и/или геометрии спиральной пружины. Эта фигура представлен собой упрощенный вид, где на спиральную пружину опирается единственной кулачок и только с одной стороны; разумеется, можно комбинировать два кулачка, выполненные с возможностью зажатия спиральной пружины 4 с двух сторон.
На фиг. 13 аналогично показана спиральная пружина 4 с дополнительным витком 18, закрепленным на этой спиральной пружине и локально образующим подкладку концевой кривой 17 спиральной пружины, и регулирующее устройство 2, приводящее в движение конец 18а этого дополнительного витка 18.
На фиг. 14 тоже показана спиральная пружина 4 с другим витком 23 вблизи ее концевой кривой 17, который удерживается первым концом 24 при помощи опоры 59, управляемой регулирующим устройством 2, и который является свободным на втором конце 25, выполненным с возможностью периодического вхождения в контакт с концевой кривой 17 под действием регулирующего устройства 2 на эту опору.
Фиг. 16А и 16В иллюстрируют изменение центра тяжести резонатора 1 с пружинным балансом 3, содержащим баланс 26 с установленным на нем по существу радиальными пружинами 72, закрепленными на ободе и поддерживающими колеблющиеся грузики 71, аналогичные показанным на фиг. 2, но некоторые из них находятся внутри, а другие снаружи обода. Соответствующие центростремительные и центробежные эффекты обеспечивают модуляцию положения центра тяжести резонатора 1.
На фиг. 17А и 17В аналогично фиг. 5 представлена другая версия системы с балансом 26 и с лопатками 80 на гибкой поворотной опоре 81, позволяющая изменять аэродинамические потери и инерцию.
Фиг. 18А-18D иллюстрируют модуляцию центра тяжести на основе резонатора, показанного на фиг. 3 или на фиг. 7, содержащего встроенные вспомогательные пружинные балансы 260 с дисбалансами 261.
На фиг. 19 представлен пример выполнения параметрического генератора колебаний с кольцом 7 баланса, на котором установлена кремниевая пружина 72 с периферическим грузиком 71, утяжеленным при помощи слоя 75 золота или другого тяжелого металла, полученного, например, посредством гальванического осаждения или другого способа, при этом узел пружина-грузик колеблется на частоте регулирования ωR. Например, ω0=10 Гц и ωR=20 Гц. На фиг. 20 показан баланс 26, в котором такие узлы пружина-грузик расположены, начиная от кольца 7 до наибольшего диаметра обода.
На фиг. 21 показан камертон 55, закрепленный в опоре 50, на одной ветви 56 которого установлен узел вспомогательного пружинного баланса 260 с эксцентричным дисбалансом 261, установленный с возможностью свободного крутильного колебания на этой ветви 56.
На фиг. 22 показан камертон 55, на одной ветви 56 которого с возможностью свободной вибрации установлен узел пружина 72/грузик 71.
В предпочтительном варианте выполнения изобретение относится также к часовому резонатору 1 с возбуждаемым колебанием, выполненному с возможностью колебания на собственной частоте ω0 и содержащему, с одной стороны, по меньшей мере один колеблющийся орган, который предпочтительно содержит баланс 26 или камертон 55 или вибрирующую пластинку или аналогичный элемент, и, с другой стороны, средства 200 поддержания колебания, выполненные с возможностью воздействия ударом и/или усилием и/и моментом сил на этот колеблющийся орган 100.
Согласно изобретению, на этом колеблющемся органе 100 установлено по меньшей мере одно колеблющееся регулирующее устройство 2, собственная частота которого является частотой регулирования ωR и составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты ω0 указанного резонатора 1, при этом указанное целое больше или равно 2 и меньше или равно 10. Конкретные значения ωR относительно собственной частоты ω0 предпочтительно следуют особым правилам, которые были указаны выше.
В первом версии это регулирующее устройство 2 содержит по меньшей мере один вспомогательный пружинный баланс 260, совершающий крутильные колебания вокруг вспомогательной поворотной оси, с дисбалансом 261, находящимся эксцентрично относительно этой вспомогательной поворотной оси этого вспомогательного пружинного баланса 260, который установлен с возможностью свободного крутильного колебания на колеблющемся органе 100.
В частности, колеблющийся орган 100 совершает крутильные колебания вокруг главной поворотной оси, и указанный по меньшей мере один вспомогательный пружинный баланс 260 имеет вспомогательную ось, смещенную относительно главной поворотной оси.
В частном варианте выполнения регулирующее устройство 2 содержит по меньшей мере первый вспомогательный пружинный баланс 260 и второй вспомогательный пружинный баланс 260, дисбалансы 261 которых в состоянии покоя в отсутствие воздействия совмещены с вспомогательными поворотными осями вспомогательных пружинных балансов 260. В частности, колеблющийся орган 100 совершает крутильные колебания вокруг главной поворотной оси, и указанный по меньшей мере один вспомогательный пружинный баланс 260 имеет вспомогательную ось, смещенную относительно главной поворотной оси.
В предпочтительном варианте, который позволяет применять технологию микроматериалов, по меньшей мере один такой вспомогательный пружинный баланс 260 совершает крутильные колебания вокруг виртуальной вспомогательной оси, которую образуют упругие средства удержания, входящие в состав колеблющегося органа 10 для удержания вспомогательного пружинного баланса 260, и ограничен по амплитуде движения относительно колеблющегося органа 10.
Предпочтительно по меньшей мере один такой вспомогательный пружинный баланс 260 выполнен моноблочно с колеблющимся органом 100.
В частности, по меньшей мере один такой вспомогательный пружинный баланс 260 выполнен моноблочно с балансом 26, входящим в состав колеблющегося органа 100 или образующим этот колеблющийся орган 100.
Во второй версии регулирующее устройство 2 содержит по меньшей мере один узел пружина-грузик, содержащий грузик 71, соединенный через пружину с точкой 73 колеблющегося органа 100.
В частности, колеблющийся орган 10 совершает крутильные колебания вокруг главной поворотной оси, и по меньшей мере одна такая пружина 72 расположена радиально относительно этой главной поворотной оси.
В частном варианте колеблющийся орган 10 содержит такие узлы пружина-грузки, в которых пружины 72 расположены радиально относительно главной поворотной оси и в которых по меньшей мере первый узел содержит грузик 71, более удаленный от главной поворотной оси, чем его пружина 72, и в которых по меньшей мере другой узел содержит грузик 71, расположенный ближе к главной поворотной оси, чем его пружина 72.
В частности, колеблющийся орган 10 совершает крутильные колебания вокруг главное поворотной оси, и по меньшей мере одна такая пружина 72 расположена в направлении, касательном к точке 73, относительно главной поворотной оси.
В частности, по меньшей мере один такой узел пружина-грузик обладает свободой движения, если не считать его точку 73 соединения, относительно колеблющегося органа 100.
В частном варианте узел пружина-грузик может ограниченно двигаться при помощи направляющих средств, входящих в состав указанного колеблющегося органа 100, или движется в дорожке 74, которую содержит указанный колеблющийся орган 100.
В третьей версии регулирующее устройство 2 содержит по меньшей мере одну лопатку 80 или пластинку 84, подвижную под действием аэродинамических изменений и соединенную с колеблющимся органом 100 при помощи цапфы 81 или при помощи упругой пластинки или при помощи стойки 85.
В частности, в частном варианте выполнения по меньшей мере одна лопатка 80 или пластинка 84 выполнена с возможностью поворота относительно цапфы 81 или упругой пластинки или стойки 85, на которой она установлена.
В предпочтительном варианте, который позволяет легко адаптировать изобретение к существующим часовым механизмам, в частности, позволяет значительно улучшить хронометрические характеристики с минимальным затратами, колеблющийся орган 100 представляет собой баланс 26, на который действуют средства 200 поддержания колебания, которые является возвратными средствами, содержащими по меньшей мере одну спиральную пружину 4 и/или по меньшей мере одну торсионную нить 46.
В другом частном варианте выполнения колеблющийся орган 100 является камертоном 55, по меньшей мере на одну ветвь 56 которого действуют средства 200 поддержания колебания.
Понятно, что эти различные не ограничительные варианты можно комбинировать между собой и/или с другими вариантами, соблюдающими принципы изобретения.
Изобретение относится также к часовому механизму 10, содержащему по меньшей мере один резонатор 1, выполненный с возможностью колебания в пределах своей собственной частоты ω0. Согласно изобретению, этот часовой механизм 10 содержит по меньшей мере одно регулирующее устройство 2, содержащее средства, выполненные с возможностью воздействия на этот резонатор 1, задавая периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя резонатора 1 с частотой регулирования ωR, которая составляет от 0,9 до 1,1 значения целого кратного собственной частоты ω0 указанного резонатора 1, при этом указанное целое больше или равно 2 и меньше или равно 10.
В первой версии этот часовой механизм 10 содержит по меньшей мере один такой резонатор 1, в котором колеблющийся орган 100 содержит по меньшей мере одно указанное регулирующее устройство 2.
Во второй версии этот часовой механизм 10 содержит по меньшей мере одно такое регулирующее устройство 2, выполненное отдельно от такого по меньшей мере одного резонатора 1, которое действует либо посредством контакта по меньшей мере с одним компонентом этого резонатора 1, либо на расстоянии от этого резонатора 1 посредством модуляции аэродинамического потока или магнитного поля или электростатического поля или электромагнитного поля.
Предпочтительно этот резонатор 1 содержит по меньшей мере один деформирующийся компонент с изменяющейся жесткостью и/или инерцией, и это по меньшей мере одно регулирующее устройство 2 содержит средства, выполненные с возможностью деформирования этого деформирующегося компонента для изменения его жесткости и/или его инерции.
В частном варианте выполнения, это по меньшей мере одно регулирующее устройство 2 содержит средства, выполненные с возможностью деформирования этого деформирующегося компонента и с возможностью модуляции положения центра тяжести этого резонатора 1.
В частном варианте выполнения, это по меньшей мере одно регулирующее устройство 2 содержит средства генерирования потерь по меньшей мере на одном компоненте этого резонатора 1.
В варианте выполнения, который является предпочтительным, так как является легким в осуществлении, регулирующее устройство 2 содержит средства модуляции аэродинамического потока вблизи колеблющегося органа 100, причем эти средства модуляции содержат по меньшей мере одну колодку 83, подвешенную к конструкции 50 при помощи упругих возвратных средств 83.
Изобретение относится также к часовому изделию 30, в частности, к наручным часам, содержащим по меньшей мере один такой часовой механизм 10.
Естественно, изобретение можно вполне применять для другого часового изделия, такого как настенные часы. Его можно применять для любого типа генератора колебаний, содержащего механический колеблющийся орган 100, и, в частности, для маятника.
Возбуждение на частоте ωR, которая было определена выше и, в частности, вдвое превышает частоту ω0, можно производить при помощи сигнала прямоугольной формы или импульсного сигнала, поэтому нет необходимости в синусоидальном возбуждении.
Поддерживающий регулятор не обязательно должен быть сверхточным: его возможная погрешность выражается только в потере амплитуды, но без изменения частоты, если только эта частота не является очень переменчивой, чего следует избегать. По сути дела эти два генератора колебаний, то есть поддерживающий регулятор и поддерживаемый резонатор, не связаны, но один из них поддерживает работу другого, в идеале (но не обязательно, только в одном направлении.
В предпочтительном варианте выполнения между этим поддерживающим регулятором 2 и поддерживаемым резонатором 1 связующая пружина отсутствует.
Изобретение отличается от известных спаренных генераторов колебаний тем, что частота регулятора вдвое превышает или является кратной собственной частоты резонатора (или по крайней мере очень близка к такому кратному), а также способом передачи энергии.




Способ поддержания работы и регулирования частоты часового резонатора (1) в пределах около его собственной частоты (ω0), согласно способу применяют по меньшей мере одно регулирующее устройство (2), воздействующее на указанный резонатор (1) периодическим движением. Указанное периодическое движение задает периодическую модуляцию резонансной частоты и/или добротности и/или положения точки покоя указанного резонатора (1) с частотой регулирования (ωR), которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты (ω0), при этом указанное целое больше или равно 2 и меньше или равно 10. Указанное периодическое движение задает периодическую модуляцию добротности указанного резонатора (1), действуя на потери и/или на демпфирование и/или на трение указанного резонатора (1). 4 н. и 25 з.п. ф-лы, 30 ил.
1. Способ поддержания работы и регулирования частоты часового резонатора (1) во время работы указанного резонатора (1) около его собственной частоты (ω0), согласно которому применяют по меньшей мере одно регулирующее устройство (2), воздействующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты, и/или добротности, и/или положения точки покоя указанного резонатора (1) с частотой регулирования (ωR) указанного регулирующего устройства (2), которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты (ω0), при этом указанное целое больше или равно 2 и меньше или равно 10, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию добротности указанного резонатора (1), оказывая влияние на потери, и/или на демпфирование, и/или на трение указанного резонатора (1).
2. Способ по п. 1, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию добротности указанного резонатора (1), оказывая влияние на аэродинамические потери указанного резонатора (1), посредством деформации указанного резонатора (1) и/или посредством изменения окружающей среды вокруг указанного резонатора (1).
3. Способ по п. 1, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию добротности указанного резонатора (1), модулируя внутреннее демпфирование упругих возвратных средств, входящих в состав указанного резонатора (1).
4. Способ по п. 1, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию добротности указанного резонатора (1), модулируя механическое трение внутри указанного резонатора (1).
5. Способ по п. 1, отличающийся тем, что применяют по меньшей мере одно регулирующее устройство (2), действующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию по меньшей мере резонансной частоты указанного резонатора (1).
6. Способ по п. 1, отличающийся тем, что применяют по меньшей мере одно регулирующее устройство (2), действующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию по меньшей мере положения точки покоя указанного резонатора (1).
7. Способ по п. 1, отличающийся тем, что применяют по меньшей мере одно регулирующее устройство (2), действующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию по меньшей мере резонансной частоты и положения точки покоя указанного резонатора (1).
8. Способ по п. 1, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию резонансной частоты указанного резонатора (1), оказывая влияние на жесткость и/или на инерцию указанного резонатора (1).
9. Способ по п. 8, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию резонансной частоты указанного резонатора (1), задавая модуляцию жесткости указанного резонатора (1) и модуляцию инерции указанного резонатора (1).
10. Способ по п. 8, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию резонансной частоты указанного резонатора (1), задавая модуляцию инерции указанного резонатора (1) посредством модуляции распределения массы указанного резонатора (1), и/или посредством деформации указанного резонатора (1), и/или посредством модуляции положения центра инерции указанного резонатора (1).
11. Способ по п. 8, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию резонансной частоты указанного резонатора (1), задавая модуляцию жесткости упругого возвратного средства, входящего в состав указанного резонатора (1), или модуляцию возвратного усилия, которым действует магнитное, или электростатическое, или электромагнитное поле внутри указанного резонатора (1).
12. Способ по п. 11, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию резонансной частоты указанного резонатора (1), задавая модуляцию активной длины пружины, входящей в состав указанного резонатора (1), или модуляцию сечения пружины, входящей в состав указанного резонатора (1), или модуляцию модуля упругости упругого возвратного средства, входящего в состав указанного резонатора (1), или модуляцию формы упругого возвратного средства, входящего в состав указанного резонатора (1).
13. Способ по п. 7, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию резонансной частоты указанного резонатора (1), задавая модуляцию жесткости указанного резонатора (1) и модуляцию положения точки покоя указанного резонатора (1).
14. Способ по п. 1, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию положения точки покоя указанного резонатора (1) посредством модуляции положения крепления указанного резонатора (1) и/или посредством модуляции равновесия между возвратными силами, действующими на указанный резонатор (1).
15. Способ по п. 14, отличающийся тем, что указанное периодическое движение задает периодическую модуляцию положения точки покоя указанного резонатора (1) посредством модуляции равновесия между возвратными силами, действующими на указанный резонатор (1) и создаваемыми механическими упругими возвратными средствами, и/или магнитными возвратными средствами, и/или электростатическими возвратными средствами.
16. Способ по п. 1, отличающийся тем, что указанное периодическое движение сообщают с одинаковой частотой регулирования (ωR) одновременно компоненту указанного резонатора (1) и механизму генерирования потерь по меньшей мере на одном компоненте указанного резонатора (1).
17. Способ по п. 1, отличающийся тем, что указанный регулирующий механизм (2) задает периодическое изменение частоты указанного резонатора (1) с относительной амплитудой, превышающей обратную величину добротности указанного резонатора (1).
18. Способ по п. 1, отличающийся тем, что указанный способ применяют для указанного резонатора (1), содержащего по меньшей мере один узел пружинного баланса (3), включающий в себя баланс (26), при этом добротность указанного резонатора (1) изменяют посредством воздействия указанным регулирующим устройством (2), вызывая колебания вспомогательных пружинных балансов (260) с сильным остаточным дисбалансом, эксцентрично установленных на указанном балансе (26).
19. Способ по п. 1, отличающийся тем, что указанный способ применяют для указанного резонатора (1), содержащего по меньшей мере один баланс (26), содержащий кольцо (7), удерживающее торсионную нить (46), образующую упругое возвратное средство (40), при этом приводят в действие указанное по меньшей мере одно регулирующее устройство (2), задавая периодическое изменение натяжения указанной торсионной нити (46).
20. Способ по п. 1, отличающийся тем, что указанный способ применяют для указанного резонатора (1), содержащего по меньшей мере один узел пружинного баланса (3), включающего в себя баланс (26), при этом добротность указанного резонатора (1) изменяют посредством изменения трения указанного баланса (26) о воздух, получаемого за счет локального изменения геометрии указанного баланса (26), на котором находятся модулирующие лопатки с профилем в виде крыльев самолета, шарнирно установленные на периферии указанного баланса (26), причем указанные лопатки являются реверсивными и выполнены с возможностью полного поворота в направлении движения.
21. Способ по п. 1, отличающийся тем, что указанный способ применяют для указанного резонатора (1), содержащего по меньшей мере один камертон, при этом указанное по меньшей мере одно регулирующее устройство (2) действует на крепление указанного камертона и/или на подвижный элемент, оказывающий давление по меньшей мере на одну ветвь указанного камертона.
22. Способ поддержания работы и регулирования частоты часового резонатора (1) во время работы указанного резонатора (1) около его собственной частоты (ω0), в котором применяют по меньшей мере одно регулирующее устройство (2), воздействующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты, и/или добротности, и/или положения точки покоя указанного резонатора (1) с частотой регулирования (ωR) указанного регулирующего устройства (2), которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты (ω0), причем указанное целое больше или равно 2 и меньше или равно 10, отличающийся тем, что указанный способ применяют к указанному резонатору (1), содержащему по меньшей мере один узел пружинного баланса (3), включающий в себя баланс (26), при этом указанную добротность указанного резонатора (1) изменяют посредством возбуждения, под действием указанного регулирующего устройства (2), колебаний вспомогательных пружинных балансов (260) с сильным остаточным дисбалансом, установленных эксцентрично на указанном балансе (26).
23. Способ поддержания работы и регулирования частоты часового резонатора (1) во время работы указанного резонатора (1) около его собственной частоты (ω0), в котором применяют по меньшей мере одно регулирующее устройство (2), воздействующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты, и/или добротности, и/или положения точки покоя указанного резонатора (1) с частотой регулирования (ωR) указанного регулирующего устройства (2), которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты (ω0), причем указанное целое больше или равно 2 и меньше или равно 10, отличающийся тем, что указанный способ применяют к указанному резонатору (1), содержащему по меньшей мере один баланс (26), содержащий кольцо (7), удерживающее торсионную нить (46), которая образует упругое возвратное средство (46) указанного резонатора (1), при этом указанное по меньшей мере одно регулирующее устройство (2) приводят в действие, задавая периодическое изменение натяжения указанной торсионной нити (46).
24. Способ поддержания работы и регулирования частоты часового резонатора (1) во время работы указанного резонатора (1) около его собственной частоты (ω0), в котором применяют по меньшей мере одно регулирующее устройство (2), воздействующее на указанный резонатор (1) периодическим движением, при этом указанное периодическое движение задает периодическую модуляцию резонансной частоты, и/или добротности, и/или положения точки покоя указанного резонатора (1) с частотой регулирования (ωR) указанного регулирующего устройства (2), которая составляет от 0,9 до 1,1 значения целого кратного указанной собственной частоты (ω0), причем указанное целое больше или равно 2 и меньше или равно 10, отличающийся тем, что указанный способ применяют к указанному резонатору (1), содержащему по меньшей мере один камертон, при этом указанное по меньшей мере одно регулирующее устройство (2) действует на крепление указанного камертона и/или на подвижный элемент, оказывающий давление по меньшей мере на одну ветвь указанного камертона.
25. Способ по любому из пп. 1, 22-24, отличающийся тем, что указанное регулирующее устройство (2) используют для запуска и/или поддержания работы указанного резонатора (1).
26. Способ по любому из пп. 1, 22-24, отличающийся тем, что указанную частоту регулирования (ωR) выбирают равной значению целого кратного указанной собственной частоты (ω0), при этом указанное целое больше или равно 2.
27. Способ по любому из пп. 1, 22-24, отличающийся тем, что указанная частота регулирования (ωR) вдвое превышает указанную собственную частоту (ω0).
28. Способ по любому из пп. 1, 22-24, отличающийся тем, что указанная частота регулирования (ωR) составляет величину между 1,8 и 2,2 указанной собственной частоты (ω0).
29. Способ по любому из пп. 1, 22-24, отличающийся тем, что периодическое движение регулирующего устройства (2) задает модуляцию частоты и/или положения точки покоя указанного резонатора (1) дистанционно при помощи электрической, или магнитной, или электромагнитной силы.
| Туннельная горелка | 1976 |
|
SU615314A1 |
| Способ вибрационной обработки | 1990 |
|
SU1810272A1 |
| US 2010090769 A1, 21.04.2011 | |||
| СПОСОБ И СИСТЕМА ДЛЯ СОЗДАНИЯ РЕЗЕРВНОЙ ЁМКОСТИ БАТАРЕЙ | 2016 |
|
RU2690507C2 |
| US 2010283556 A1, 11.11.2010 | |||
| Распределитель шихты загрузочного устройства доменной печи | 1984 |
|
SU1217883A1 |

