Изобретение относится к регулирующему модулю для возврата в исходное состояние отклонения осциллятора, возбуждаемого гармоническим колебанием, к устройству, включающему в себя такой регулирующий модуль, в частности к датчику мгновенной угловой скорости, а также к способу эксплуатации и изготовления такого регулирующего модуля.
Обычные методики регулирования приспособлены к задаче регулирования с постоянной или изменяющейся лишь медленно задающей величиной, при этом значение регулируемой величины, подвергаемой влиянию возмущающей величины, удерживают в максимальной близости от заданного номинального значения или же сопровождают его в максимальной близости от изменяющегося номинального значения. Некоторые варианты применения, например микромеханические датчики мгновенной угловой скорости для определения значения кориолисовой силы, предусматривают возврат в исходное состояние отклонения осциллятора, колеблющегося в стационарных условиях со своей резонансной частотой, при помощи регулирующего контура. Регулятор для такого регулирующего контура с гармоническим колебанием в качестве задающей величины обычно рассчитывают таким образом, что возбуждающий осциллятор гармонический силовой сигнал F компенсируется так, что осциллятор по возможности не совершает перемещения, не считая гармонического колебания, соответствующего задающей величине.
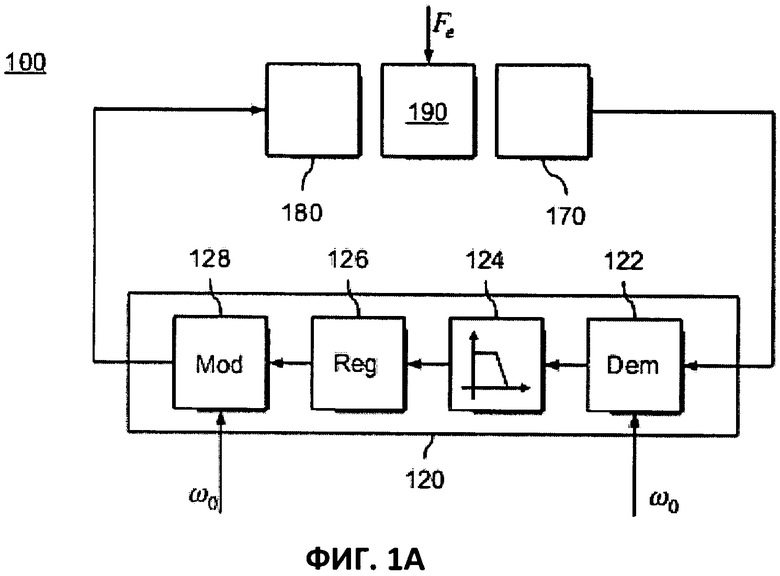
Обычно эту задачу регулирования решают при помощи подхода, показанного на фиг.1A-1D. Фиг.1A относится к устройству 100, содержащему объект регулирования, например механический осциллятор 190, поступательное или вращательное отклонение которого регистрируется чувствительным элементом 170. Осциллятор 190 установлен или же подвешен таким образом, что он является подвижным вдоль направления возбуждения и может колебаться с резонансной круговой частотой ω0. Вдоль направления возбуждения на осциллятор 190 действует гармонический силовой сигналу Fe. Выдаваемый чувствительным элементом 170 измерительный сигнал отображает перемещение осциллятора 190 вдоль направления возбуждения. Перемещение осциллятора 190 включает в себя модулированное амплитудой F силы (возмущающий сигнал) резонансное колебание с резонансной круговой частотой ω0 осциллятора 190.
Измерительный сигнал (выходной сигнал системы) подводят к регулирующему модулю 120, содержащему демодулятор 122. В демодуляторе 122 выходной сигнал системы перемножают с гармоническим сигналом с частотой ω0, равной резонансной круговой частоте ω0 осциллятора 190, при этом образуются версия выходного сигнала системы в первичной полосе частот, а также дополнительные смешанные произведения. Фильтр 124 нижних частот демпфирует более высокие частотные составляющие, в частности, при двойной резонансной круговой частоте 2·ω0 осциллятора 190. Сигнал в первичной полосе частот подводят к регулятору 126, который работает в первичной полосе частот, и для разработки и назначения параметров которого могут применяться общеупотребительные методы расчета регуляторов. Например, регулятором 126 является непрерывный пропорционально-интегральный регулятор, при помощи которого благодаря его интегральной компоненте при наличии постоянной задающей величины может быть достигнута высокая стационарная точность.
Выходной сигнал регулятора 126 перемножают (модулируют) в модуляторе 128 с гармоническим сигналом с частотой ω0, равной резонансной круговой частоте ω0 осциллятора 190. Результат модуляции подводят в качестве регулирующего сигнала к исполнительному органу 180, который на основании регулирующего сигнала воздействует на осциллятор 190 усилием, противодействующим отклонению осциллятора 190. При помощи резонансной круговой частоты ω0 и демпфирования s0 осциллятора, а также усиления А и времени Ts запаздывания системы, образованной из исполнительного органа 180, осциллятора 190 и чувствительного элемента 170, передаточная функция регулируемого осциллятора 190 может быть представлена уравнением (1):

В дальнейшем принято, что демпфирование s0 осциллятора 190 намного меньше, чем его резонансная круговая частота, sa<<ω0, и что осциллятор 190 в общей сложности возбуждается гармоническим силовым сигналом Fe, при котором амплитуда F силы накладывается на колебание возбуждения с резонансной круговой частотой ω0 осциллятора или же модулирует его по амплитуде:

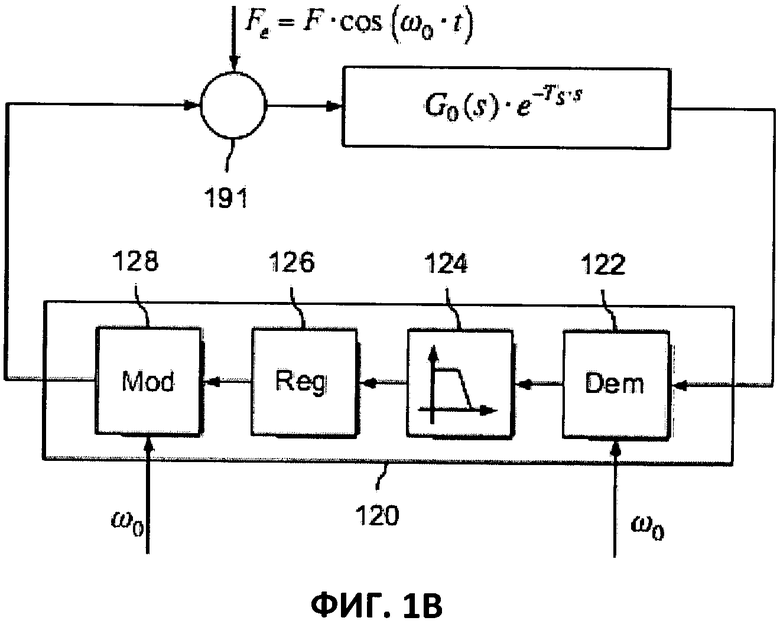
При этом в соответствии с фиг.1 В исполнительный орган 180, осциллятор 190 и чувствительный элемент 170, показанные на фиг.1A, могут быть представлены в виде системы с точкой 191 суммирования и передаточной функцией G(s), при этом в точке 191 суммирования выработанный регулирующим модулем 120 регулирующий сигнал суммируется с гармоническим силовым сигналом Fe, и на суммарный сигнал воздействует передаточная функция G(s) согласно уравнению (1).
Фильтр 124 нижних частот, который уже при двойной резонансной круговой частоте осциллятора должен иметь достаточное демпфирование, чтобы в достаточной мере демпфировать смешанное произведение при 2·ω0, ограничивает ширину полосы частот регулятора и, таким образом, его скорость реакции на изменения силовой амплитуды F.
На фиг.1C схематически показан выходной сигнал u(t) на выходе непрерывного пропорционально-интегрального регулятора с передаточной функцией GR(s). Постоянный входной сигнал xd(t) на входе регулятора образует пропорциональную времени кривую u(t) на выходе регулятора.
Для непрерывного пропорционально-интегрального регулятора с коэффициентом усиления KP и коэффициентом интегрирования KI для входного сигнала в виде скачкообразного сигнала σ(t) получается реакция u(t) на ступенчатое воздействие согласно уравнению (3):

При помощи преобразования Лапласа σ(t) и уравнения (3) получается передаточная функция GR(s) согласно уравнению (4):

Характерным для непрерывного пропорционально-интегрального регулятора является получающийся вследствие интегрального компонента полюс при s=0. Если пропорционально-интегральный регулятор применяют в сочетании с объектом регулирования первого порядка, имеющим объектную функцию GS(s), объектный параметр KS и граничную круговую частоту ω1, согласно уравнению (5)

то параметры регулятора, то есть, коэффициент усиления KP и коэффициент интегрирования KI обычно выбирают таким образом, что полюс объектной функции GS(s) (объектный полюс) компенсируется посредством нулевой точки передаточной функции GR(s) регулятора (нулевой точки регулятора). Посредством сопоставления коэффициентов в уравнениях (4) и (5) в качестве условия для параметров регулятора получается зависимость согласно уравнению (6):

Уравнение (6) устанавливает только отношение коэффициента KP усиления к коэффициенту KI интегрирования. Произведение передаточной функции объекта GS(s) и передаточной функции GR(s) регулятора дает передаточную функцию GK(s) скорректированного открытого контура. Вследствие того, что объектный полюс согласно уравнению (5) и нулевая точка регулятора согласно уравнению (4) взаимно сокращаются, для передаточной функции GK(s) скорректированного открытого контура получается зависимость согласно уравнению (7):

Из частотной характеристики скорректированного открытого контура при помощи критерия Найквиста может быть сделано заключение о параметрах стабильности замкнутого контура. Вследствие интегральной характеристики скорректированного открытого контура получается количественная характеристика, которая спадает с величиной 20 дБ на десятичный разряд. Для положительных частот, которыми обычно ограничено применение критерия Найквиста, фаза всегда составляет -90°. Фазовая характеристика является нелинейной функцией и при частоте, равной 0, имеет скачок на 180° от +90° для отрицательных частот до -90° для положительных частот. Передаточная функция GW(s) для замкнутого контура получается из передаточной функции GK(s) скорректированного открытого контура в общем случае согласно уравнению (8):

Из уравнения (8) получается, что передаточная функция GW(s) для замкнутого контура является стабильной только тогда, когда амплитудно-фазовая характеристика скорректированного открытого контура при 0≤ω<∞ ни окружает точку -1, ни проходит через нее. Эквивалентным этому условием является то, что при прохождении количественной характеристики скорректированного открытого контура через линию 0 дБ фаза скорректированного открытого контура больше, чем -180°. Так как в упомянутом выше случае фаза постоянно составляет -90°, то в соответствии с этим замкнутый контур всегда является стабильным, независимо от выбора коэффициента KP усиления.
Из частоты при прохождении количественной характеристики через линию 0 дБ можно сделать заключение о ширине полосы частот замкнутого контура. Посредством коэффициента КР усиления количественная частотная характеристика может сдвигаться в направлении ординаты и, таким образом, может оказываться влияние на прохождение через линию 0 дБ или же на получающуюся вследствие этого ширину полосы частот.
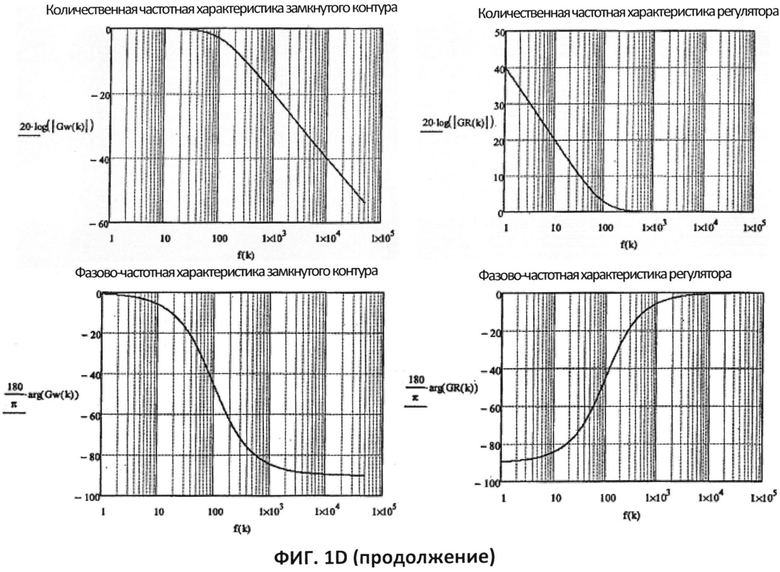
На фиг.1D показан вариант выполнения, содержащий объект регулирования первого порядка с граничной круговой частотой ω1=2·π·100 Гц, объектным параметром KS=ω, и содержащий пропорционально-интегральный регулятор, нулевая точка которого выбрана таким образом, что она компенсирует объектный полюс, и коэффициент KP усиления которого равен 1. В левой колонке сверху вниз показаны количественные частотные характеристики объекта регулирования, регулятора, скорректированного открытого контура и замкнутого контура, а в правой колонке сверху вниз показаны фазово-частотные характеристики объекта регулирования, регулятора, скорректированного открытого контура и замкнутого контура. Как видно на диаграмме слева внизу, ширина полосы частот замкнутого контура, определяемая частотой, при которой количественная частотная характеристика замкнутого контура спадает на 3 дБ, составляет примерно 100 Гц.
Применение классического пропорционально-интегрального регулятора предполагает наличие относительно постоянной задающей величины, вследствие чего варианты применения, в которых подлежит доведению до минимума гармоническая задающая величина с почти неизменной частотой, предполагают применение демодулятора и включенного за ним фильтра нижних частот, которые из гармонического входного сигнала вырабатывают соответствующий сигнал в первичной полосе частот.
Задачей изобретения является предложить улучшенную концепцию регулятора для возврата в исходное состояние вызванного возмущающей величиной отклонения осцилляторов, гармонически колеблющихся в стационарном случае, например, одного из подвижно установленных модулей датчика мгновенной угловой скорости. Задача решена при помощи предмета независимых пунктов формулы изобретения. Предпочтительные усовершенствования вытекают из соответствующих зависимых пунктов формулы изобретения.
Ниже при помощи чертежей описаны варианты выполнения изобретения, принцип их функционирования, а также их преимущества. Элементы вариантов выполнения могут комбинироваться друг с другом, если только они друг друга не исключают.
На фиг.1A показана блок-схема известного по состоянию техники устройства, содержащего гармонически возбуждаемый осциллятор и регулирующий модуль для возврата в исходное состояние отклонения осциллятора.
На фиг.1B показана схематическая модель устройства согласно фиг.1A.
На фиг.1C иллюстрируется передаточная функция непрерывного пропорционально-интегрального регулятора, работающего в первичной полосе частот.
На фиг.1D показаны диаграммы частотных характеристик непрерывного пропорционально-интегрального регулятора для иллюстрации принципа действия регулирующих модулей, известных по состоянию техники.
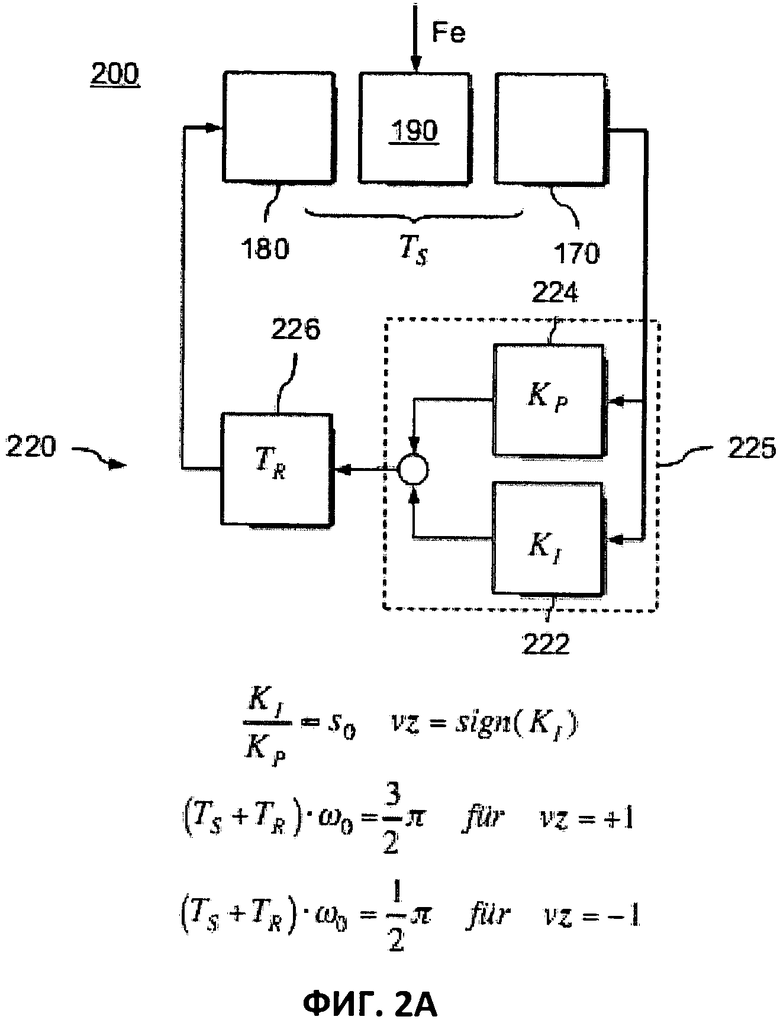
На фиг.2A показана блок-схема устройства, содержащего регулирующий модуль согласно варианту выполнения, который относится к регулирующему модулю, содержащему непрерывный пропорционально-интегральный регулятор для гармонических задающих величин и звено с запаздыванием.
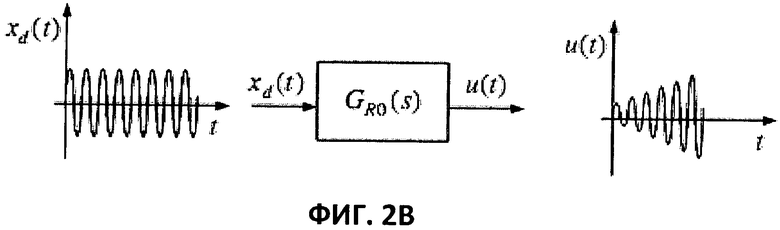
На фиг.2B схематически показана передаточная функция пропорционально-интегрального регулятора согласно фиг.2A.
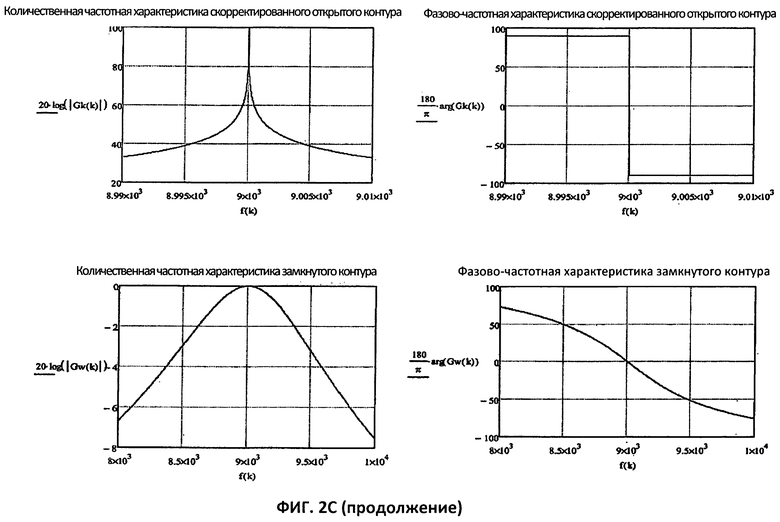
На фиг.2C показаны схематические диаграммы частотных характеристик для регулирующего модуля, представленного на фиг.2A.
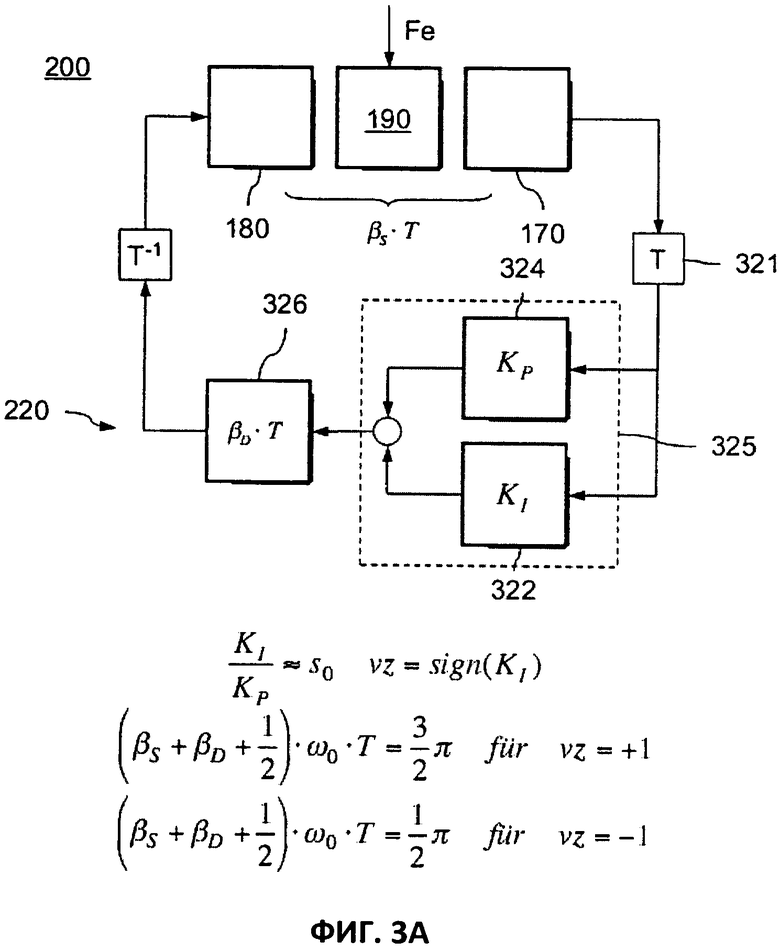
На фиг.3A показана блок-схема устройства, содержащего регулирующий модуль согласно варианту выполнения, который относится к регулирующему модулю, содержащему дискретный пропорционально-интегральный регулятор для гармонических задающих величин и звено с запаздыванием.
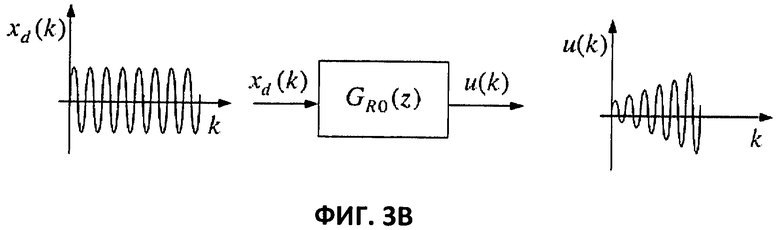
На фиг.3B схематически иллюстрируется передаточная функция регулирующего модуля согласно фиг.3A.
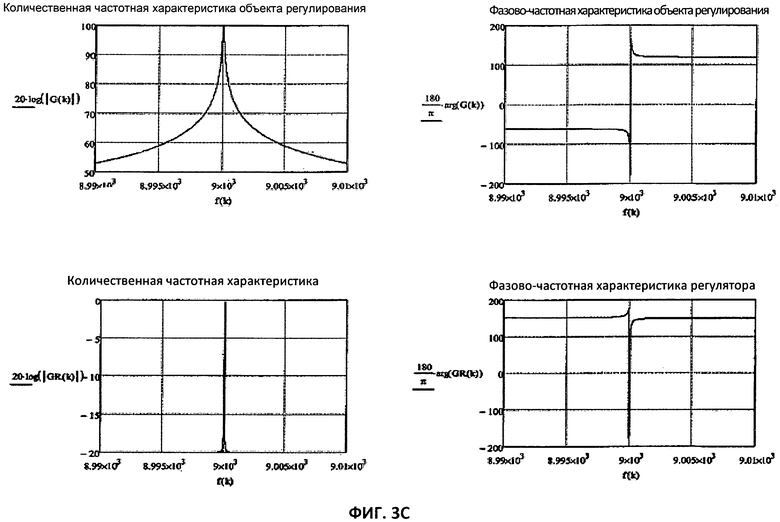
На фиг.3C показаны схематические диаграммы частотных характеристик для пояснения принципа действия регулирующего модуля, представленного на фиг.3A.
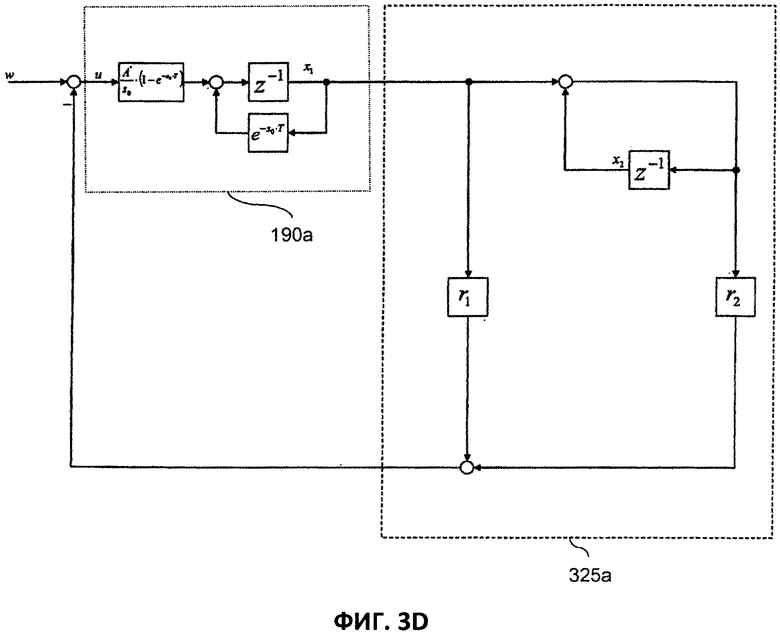
На фиг.3D показана упрощенная блок-схема трансформированного в первичную полосу частот регулирующего модуля согласно фиг.3A в соответствии с одним вариантом выполнения.
На фиг.3E показаны схематические диаграммы частотных характеристик дискретного регулирующего модуля, параметры которого назначены согласно одному варианту выполнения способа изготовления регулирующего модуля, включающего в себя определение параметров регулятора путем задания собственных значений.
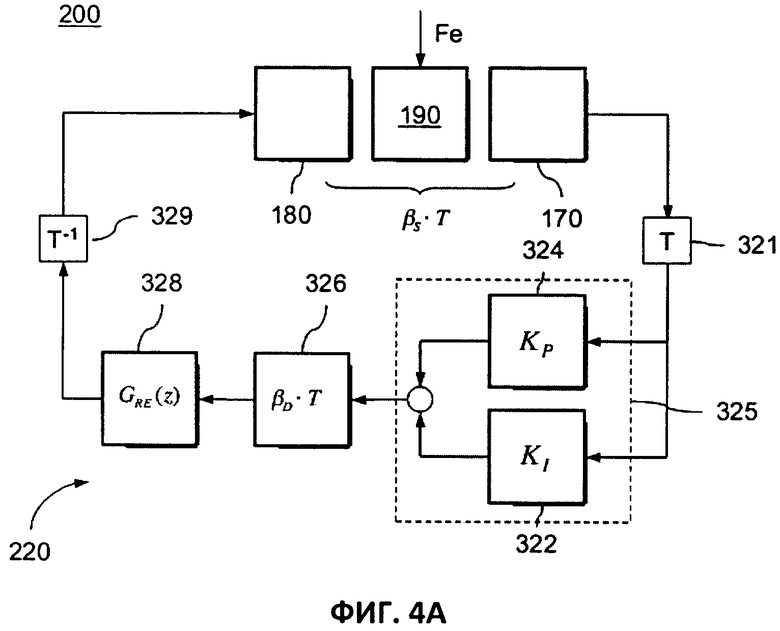
На фиг.4A показана блок-схема устройства, содержащего регулирующий модуль согласно варианту выполнения, который относится к регулирующему модулю, содержащему дискретный пропорционально-интегральный регулятор для гармонических задающих величин и дополнение регулятора, действующее аналогично полосовому фильтру.
На фиг.4B схематически показана передаточная функция дополнения регулятора согласно фиг.4A.
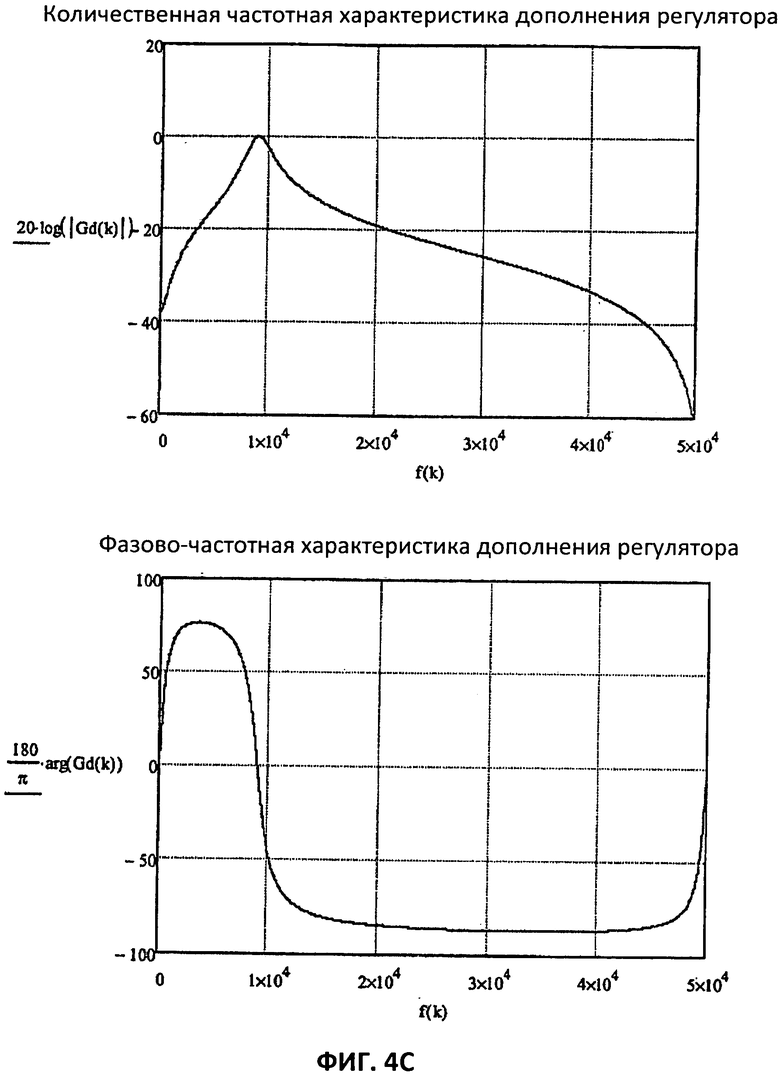
На фиг.4C показаны диаграммы частотных характеристик для пояснения принципа действия дополнения регулятора согласно фиг.4A.
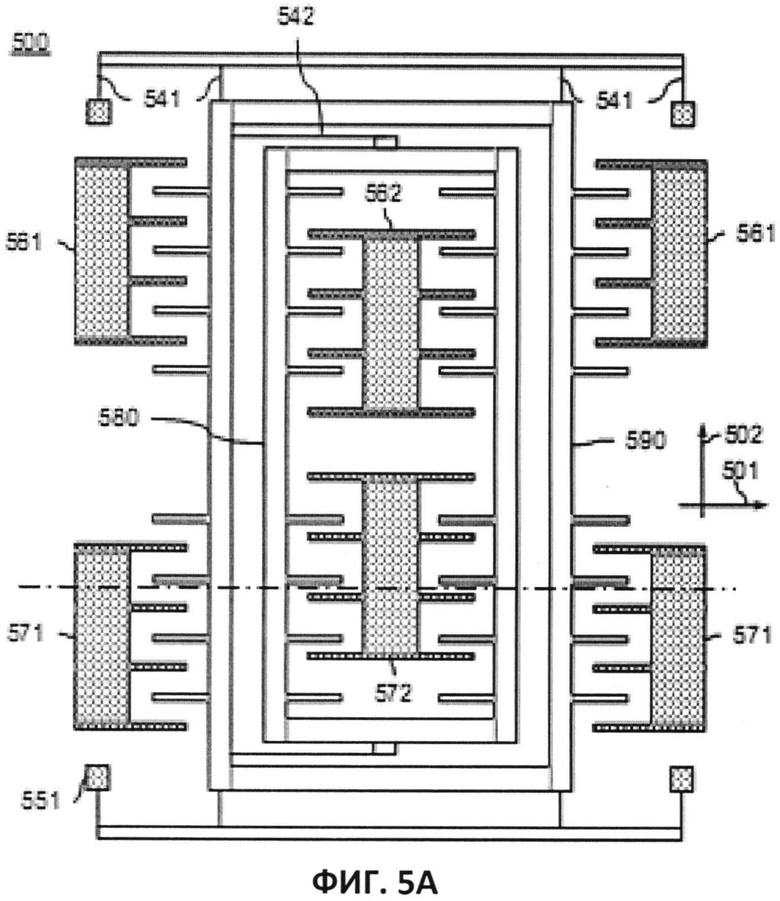
На фиг.5A показан схематический вид сверху микромеханической части датчика мгновенной угловой скорости согласно следующему варианту выполнения изобретения.
На фиг.5B показано схематическое изображение в поперечном сечении микромеханической части датчика мгновенной угловой скорости согласно фиг.5A.
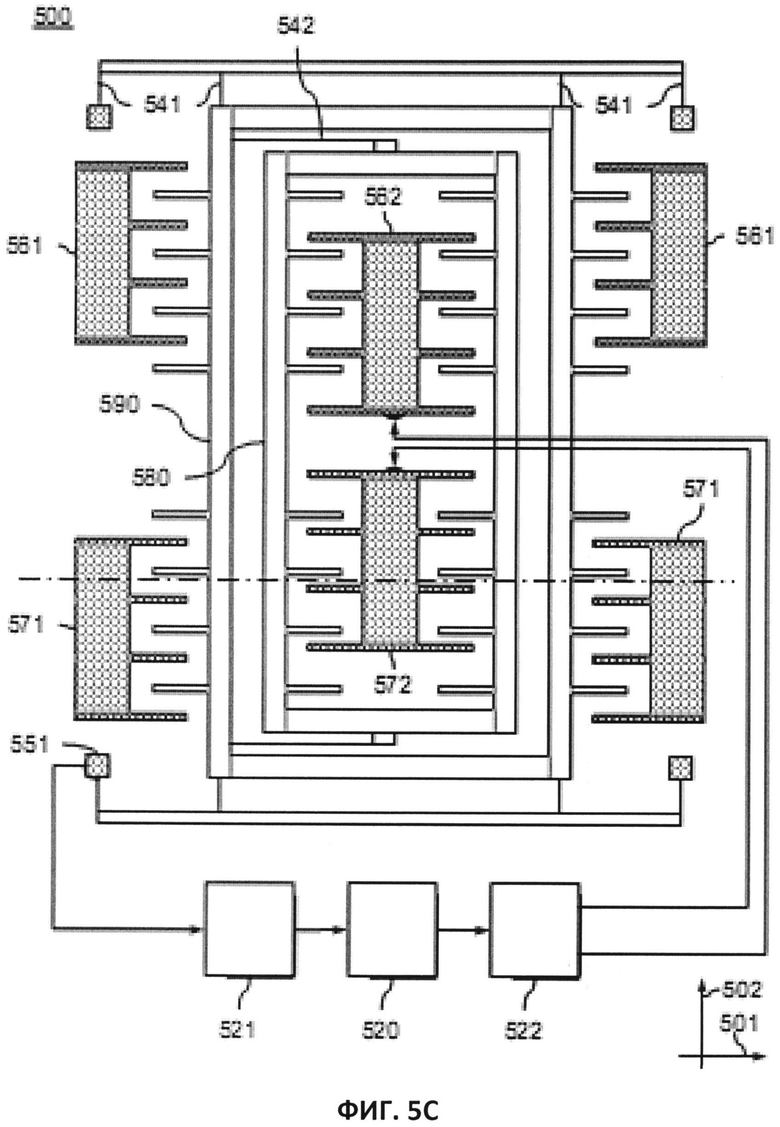
На фиг.5C показана блок-схема датчика мгновенной угловой скорости согласно фиг.5A и 5B.
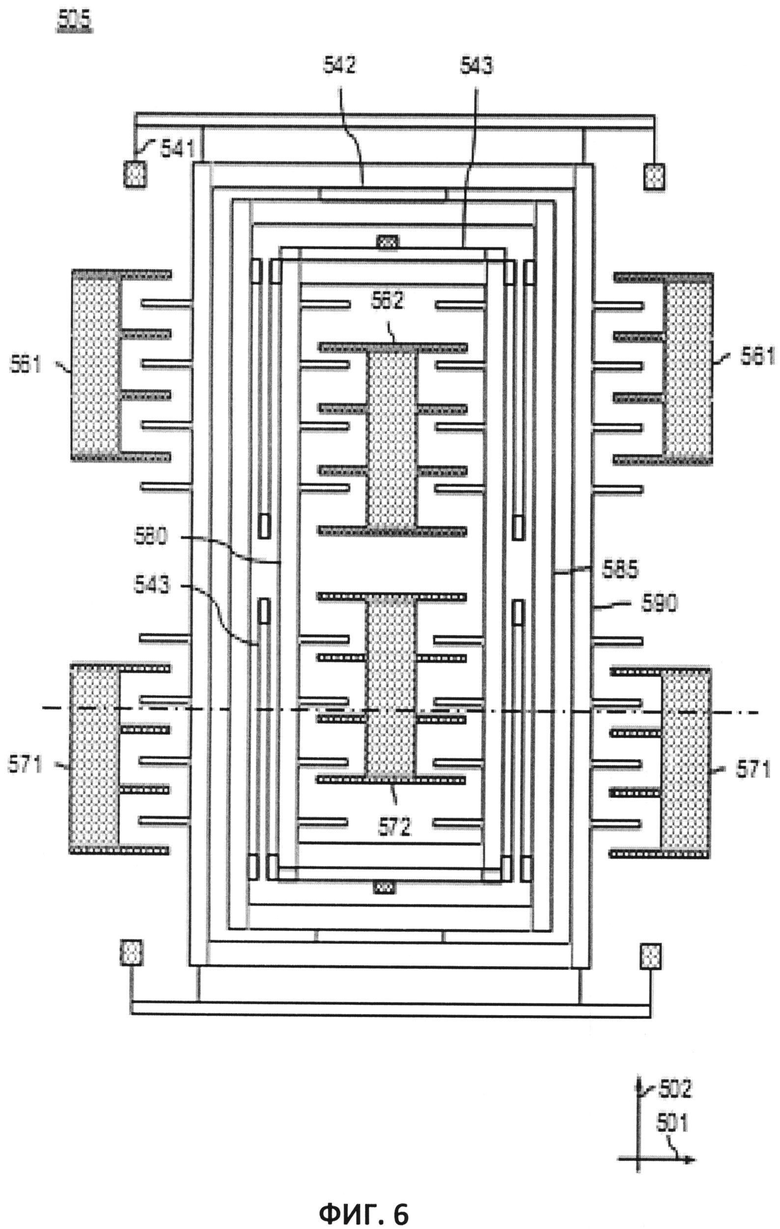
На фиг.6 показан схематический вид сверху микромеханической части датчика мгновенной угловой скорости согласно следующему варианту выполнения изобретения.
На фиг.7A показана упрощенная структурная схема способа эксплуатации датчика мгновенной угловой скорости.
На фиг.7B показана упрощенная структурная схема способа изготовления датчика мгновенной угловой скорости.
Вариант выполнения, показанный на фиг.2A, относится к устройству 200, содержащему регулирующий модуль 220, который включает в себя пропорционально-интегральный регулятор 225 для гармонических задающих величин, содержащий интегрирующее передаточное звено 222 с коэффициентом KI интегрирования и пропорциональное передаточное звено 224 с коэффициентом KP усиления. Пропорционально-интегральный регулятор 225 для гармонических задающих величин вырабатывает из модулированного по амплитуде скачкообразной функцией гармонического колебания с постоянной амплитудой на входе регулятора гармоническое колебание с такой же частотой и пропорциональной времени амплитудой на выходе регулятора.
На фиг.2B иллюстрируется преобразование синусно модулированного скачкообразного сигнала xd(t) в гармонический выходной сигнал u(t) с пропорциональной времени амплитудой посредством передаточной функции GR0(s) пропорционально-интегрального регулятора 225. Описанный режим пропорционально-интегрального регулятора предполагает назначение параметров K1, KP регулятора, которое описано ниже.
Аналогично уравнению (3) уравнение (9) воспроизводит зависимость между выходным сигналом u(t) регулятора и входным сигналом xd(t) регулятора для xd(t)=σ(t):

Преобразования Лапласа выходного сигнала u(t) регулятора и входного сигнала xd(t) регулятора получаются из уравнений (9а) и (9b):


В соответствии с этим, передаточная функция GR0(s) пропорционально-интегрального регулятора 225 для гармонических задающих величин получается согласно уравнению (10):

Характерным для непрерывного пропорционально-интегрального регулятора 225 является получающийся вследствие обобщенной интегральной компоненты комплексно сопряженный полюс при s=±jω0.
При гармоническом колебании с частотой ω0 на входе регулятора пропорционально-интегральный регулятор 225 не образует на выходе регулятора смещение фазы. Поэтому для установления произвольной фазы регулирующий модуль 220 дополнительно включает в себя звено 226 с запаздыванием, имеющее время TR запаздывания, включенное последовательно с пропорционально-интегральным регулятором 225. В соответствии с этим передаточная функция GR(s) регулирующего модуля 220 получается согласно уравнению (11):

Параметры KI, KP регулятора выбирают таким образом, что нулевые точки регулятора в передаточной функции регулятора согласно уравнению (11) компенсируют комплексно сопряженный объектный полюс в передаточной функции объекта согласно уравнению (1). Посредством сопоставления коэффициентов в уравнениях (1) и (11) для определения параметров KI, КР регулятора получаются уравнения (12а) и (12b):


Согласно одному варианту выполнения демпфирование s0 и резонансную круговую частоту ω0 осциллятора 190 выбирают таким образом, что s0<<ω0, и таким образом, уравнение (12b) выполнено с очень хорошим приближением. Из уравнения (12а) получается уравнение (12с), служащее в качестве условия назначения отношения коэффициента KI интегрирования к коэффициенту КР усиления:

Передаточная функция GK(s) скорректированного открытого контура получается из произведения передаточной функции GS(s) объекта и передаточной функции GR(s) регулятора. Так как при соответствующем назначении параметров согласно уравнениям (12b), (12с) выражения для комплексно сопряженного объектного полюса и комплексно сопряженной нулевой точки регулятора сокращаются, получается передаточная функция GK(s) скорректированного открытого контура согласно уравнению (13):

При регулировании с помощью традиционного пропорционально-интегрального регулятора в фазово-частотной характеристике скорректированного открытого контура при частоте ω=0 происходит скачок фазы с +90° на -90°. В противоположность этому, в рассчитанном для гармонических задающих величин пропорционально-интегральном регуляторе 255 при частоте ω0 происходит скачок фазы на 180°, который однако не обязательно осуществляется между значениями +90° и -90°. Поэтому согласно одному варианту выполнения время TR запаздывания регулятора выбирают таким образом, что скачок фазы на 180° происходит по возможности точно при ω0, например, посредством того, что параметры регулятора назначают согласно уравнению (14а):

Если смещение фазы при ω0, вызванное одним только временем TS запаздывания объекта, меньше 90°, то можно также образовать фазовую компоненту в размере 180° при помощи инвертирующего регулятора. В этом случае фазы, вызванные временем TR запаздывания регулятора и временем TS запаздывания объекта, при ω0 должны лишь дополняться до 

Из частотной характеристики скорректированного открытого контура при помощи критерия Найквиста можно сделать заключение о параметрах стабильности замкнутого контура. Скорректированный открытый контур состоит из обобщенного интегратора и комбинации времени TS запаздывания объекта и времени TR запаздывания регулятора. Благодаря надлежащему назначению времени TR запаздывания регулятора согласно одному из уравнений (14a) или (14b) фазовая характеристика при частоте а>0 имеет скачок на 180° от +90° для более низких частот ω<ω0 до -90° для более высоких частот ω>ω0. Передаточная функция GW(s) замкнутого контура снова получается из передаточной функции GK(s) скорректированного открытого контура согласно уравнению (8):

Если время TR запаздывания регулятора определяют согласно уравнению (14a), то замкнутый контур является стабильным именно тогда, когда амплитудно-фазовая характеристика скорректированного открытого контура при 0≤ω<ω0 ни окружает точку -1, ни проходит через нее.
Если, в противоположность этому, время TR запаздывания регулятора определяют при помощи уравнения (14b), и пропорционально-интегральный регулятор 225 вырабатывает фазу в размере 180°, то замкнутый контур является стабильным именно тогда, когда амплитудно-фазовая характеристика скорректированного открытого контура начинается на отрицательной вещественной оси при значении, большем -1.
В интервале 0≤ω<ω0 количественная характеристика пересекает линию 0 дБ при частоте прохождения, при этом частотный интервал частоты прохождения по отношению к ω0 определяет ширину полосы частот замкнутого контура. Посредством коэффициента KP усиления количественная частотная характеристика и, таким образом, частота прохождения, могут сдвигаться в направлении ординаты, так что образующаяся ширина полосы частот для замкнутого контура может регулироваться. Согласно одному варианту выполнения коэффициент KP усиления выбирают в рамках границ, заданных критериями стабильности, таким образом, что ширина полосы частот является максимальной.
На фиг.2C в левой колонке сверху вниз показаны количественные частотные характеристики регулируемого объекта, регулятора, скорректированного открытого контура, а также замкнутого контура, а в правой колонке показаны фазово-частотные характеристики объекта регулирования, регулятора, скорректированного открытого контура и замкнутого контура для варианта выполнения, при котором применены следующие параметры объекта регулирования:
резонансная круговая частота осциллятора ω0=2·π·9000 Гц,
демпфирование осциллятора 
усиление 
время запаздывания объекта 
Нулевая точка регулятора выбрана таким образом, что компенсируется объектный полюс. Так как вызванная временем запаздывания объекта фаза при ω0 меньше 90°, то фазовая компонента в размере 180° может быть реализована при помощи отрицательного знака в регуляторе (инвертирующий регулятор). Для коэффициента усиления 

Образующаяся ширина полосы частот замкнутого контура составляет примерно 500 Гц и является существенно большей, чем в сравнительном варианте выполнения для традиционного пропорционально-интегрального регулятора, работающего в первичной полосе частот.
Показанное на фиг.2A устройство 200 включает в себя осциллятор 190 и регулирующий модуль 220. Осциллятором 190 является масса, которая является подвижной вдоль направления возбуждения и может колебаться вдоль него с резонансной круговой частотой ω0. В стационарном случае, то есть, без воздействия возмущающей величины, осциллятор 190 совершает поступательное или вращательное колебание с резонансной круговой частотой ω0. На это колебание накладывается отклонение, вызванное силовой амплитудой F. Чувствительный элемент 170 регистрирует перемещение осциллятора 190 и выдает измерительный сигнал, который отображает общее отклонение осциллятора 190 вдоль направления возбуждения. Измерительный сигнал соответствует входному сигналу регулятора для регулирующего модуля 220. Регулирующий модуль 220 вырабатывает из входного сигнала регулятора выходной сигнал регулятора и выдает его на исполнительный орган 180. Исполнительный орган 180 противодействует вызванному силовым сигналом F отклонению осциллятора или же его компенсирует, так что осциллятор 190 совершает гармоническое колебание с постоянной амплитудой и с резонансной круговой частотой ω0.
Регулирующий модуль 220 содержит пропорционально-интегральный регулятор 225 для гармонических задающих величин, который включает в себя пропорциональное передаточное звено 224 с коэффициентом KP усиления и интегрирующее передаточное звено 222 с коэффициентом KI интегрирования. Коэффициент KI интегрирования и коэффициент KP усиления выбраны таким образом, что в плоскости s нулевая точка передаточной функции пропорционально-интегрального регулятора 225 и комплексно сопряженный полюс передаточной функции объекта, описывающей осциллятор 190, взаимно компенсируются.
Согласно одному варианту выполнения демпфирование s0 осциллятора в отношении отклонения в направлении возбуждения намного меньше, чем резонансная круговая частота ω0 осциллятора 190, и отношение коэффициента KI интегрирования к коэффициенту KP усиления в с-1 примерно соответствует демпфированию s0. Кроме того, коэффициент KP усиления может выбираться таким, что образующаяся ширина полосы частот является максимально большой для соответствующих требований стабильности. При этом коэффициент KI интегрирования выбирают в зависимости от демпфирования s0 и коэффициента КР усиления согласно уравнению (12c).
Согласно одному варианту выполнения система, образованная из исполнительного органа 180, осциллятора 190 и чувствительного элемента 170, имеет время TS запаздывания объекта, а регулирующий модуль 220 содержит действующее последовательно с пропорционально-интегральным регулятором 225 звено 226 с запаздыванием, имеющее время TR запаздывания регулятора. Время TR запаздывания регулятора выбирают в зависимости от резонансной круговой частоты ω0 осциллятора 290 и времени TS запаздывания объекта таким образом, что фазово-частотная характеристика скорректированного открытого контура при частоте ω0 имеет фазовый скачок от +90° до -90° при повышении частоты.
Согласно первому варианту этой формы выполнения пропорционально-интегральный регулятор для гармонических задающих величин не обращает знак, а время TR запаздывания регулятора выбирают таким образом, что произведение резонансной круговой частоты ω0 и суммы времени TS запаздывания объекта и времени TR запаздывания регулятора дает в результате 


Так как в регулирующем модуле 220 не предусмотрено преобразование первичной полосы частот, которое требует фильтра нижних частот для демпфирования высокочастотных смешанных произведений, регулирующий модуль 220 может быть выполнен значительно более широкополосным. Регулирующий модуль 220 реагирует на возмущающие величины быстрее, чем сравнимые регуляторы, в которых предусмотрено преобразование первичной полосы частот.
Фиг.3А-3Е относятся к варианту выполнения, в котором регулирующий модуль 220 имеет дискретный пропорционально-интегральный регулятор 325 для гармонических задающих величин, содержащий дискретное пропорциональное передаточное звено 324 с коэффициентом KP усиления и дискретное интегрирующее передаточное звено 322 с коэффициентом KI, интегрирования. Согласно одному варианту выполнения аналоговый измерительный сигнал от чувствительного элемента 170 дискретизируют при помощи модуля 321 дискретизации с периодом Т дискретизации и преобразуют в цифровой входной сигнал для дискретного пропорционально-интегрального регулятора 325. Согласно другому варианту выполнения чувствительный элемент 170 уже выдает цифровой измерительный сигнал.
Согласно одному варианту выполнения, при котором система, включающая в себя исполнительный орган 180, осциллятор 190 и чувствительный элемент 170, имеет время TS запаздывания объекта, регулирующий модуль 220 содержит расположенное последовательно с дискретным пропорционально-интегральным регулятором 325 звено 326 с запаздыванием, имеющее время TR запаздывания регулятора. Ниже как время TS запаздывания объекта, так и время TR запаздывания регулятора выражены согласно уравнениям (16a) и (16b) в виде кратного периода Т дискретизации:


При этом время TR запаздывания регулятора определяют таким образом, что скорректированный открытый контур при резонансной круговой частоте ω0 имеет фазовый скачок от +90° до -90° при повышении частоты.
Согласно одному варианту выполнения отношение коэффициента KI интегрирования к коэффициенту KP усиления установлено таким образом, что в плоскости s нулевые точки передаточной функции регулятора компенсируют комплексно сопряженный объектный полюс передаточной функции объекта. Согласно другому варианту выполнения параметры регулятора выбраны таким образом, что передаточная функция замкнутого контура эквивалентной системы с первичной полосой частот имеет двойное вещественное собственное значение. Регулирующий модуль 220 реализован, например, в виде цифровой коммутационной схемы, в частности в виде ASIC (специализированная интегрированная коммутационная схема), DSP (цифровой процессор сигналов) или FPGA (программируемая логическая матрица).
Фиг.3B иллюстрирует передаточную функцию GR0(z) дискретного пропорционально-интегрального регулятора 325 для гармонических задающих величин согласно фиг.3A. Передаточную функцию GR0(z) определяют таким образом, что пропорционально-интегральный регулятор 325 из входного сигнала xd(k), включающего в себя гармоническое колебание, модулированное скачкообразной функцией σ(k), вырабатывает в качестве выходного сигнала u(k) регулятора гармоническое колебание с такой же частотой и с пропорциональной времени амплитудой, как это выражено уравнением (17):

Входная функция Xd(z) и выходная функция U(z) получаются посредством z-преобразования согласно уравнениям (18a) и (18b):


При этом передаточная функция GR0(z) дискретного пропорционально-интегрального регулятора 325 для гармонических задающих величин получается согласно уравнению (18c):

Вследствие обобщенной интегральной компоненты такой дискретный пропорционально-интегральный регулятор имеет полюс при 

Модель непрерывного объекта регулирования согласно уравнению (1) должна быть соответствующим способом подвергнута дискретизации. Для этого вначале в передаточной функции G(s) объекта регулирования согласно уравнению (1) выражают время TS запаздывания объекта согласно уравнению (16a) в виде кратного периода Т дискретизации:

В общем случае ступенчатая передаточная функция G(z) для дискретизированной модели непрерывного объекта регулирования с передаточной функцией G(s) может быть рассчитана согласно уравнению (21):

С последующими сокращениями согласно уравнениям (21а)-(21е):





из уравнений (20) и (21) получается ступенчатая передаточная функция G(z) для осциллятора 190 согласно уравнению (22):

Согласно одному варианту выполнения изобретения время TR запаздывания регулятора определяют таким образом, что фазово-частотная характеристика скорректированного открытого контура имеет при резонансной круговой частоте ω0 фазовый скачок с +90° до -90° при повышении частоты. Z-передаточная функция скорректированного открытого контура получается аналогично уравнению (13) из произведения передаточной функции G(z) объекта согласно уравнению (20) и передаточной функции GR(z) регулятора согласно уравнению (19):

Аналогично уравнениям (14a) и (14b) параметр βD регулятора выбирают таким образом, что при резонансной круговой частоте ω0 передаточная функция GK(z) скорректированного открытого контура имеет фазовый скачок с 90° до -90°:

При сопоставлении с уравнением (14a) по сравнению с непрерывным регулятором получается дополнительная компонента в размере 


Уравнения (24а) и (24b) приводят, как правило, к нецелочисленному значению βD. В общем случае параметр βD регулятора имеет целочисленную часть nD и остаток 

Согласно одному варианту выполнения целочисленную часть nD аппроксимируют при помощи цепочки с запаздыванием в соответствии с протяженностью, заданной nD, а дробную часть

Согласно одному варианту выполнения параметр a
D всечастотного фильтра выбирают таким образом, что фаза точной передаточной функции 

Согласно одному варианту выполнения a D определяют посредством того, что по интервалам определяют нулевую точку функции согласно уравнению (28):

Определение nD и a D согласно уравнениям (25) и (28) является независимым от вида определения следующих параметров KP и KI регулятора.
Согласно одному варианту выполнения способа изготовления регулирующего модуля, который включает в себя назначение параметров дискретного пропорционально-интегрального регулятора 325 согласно фиг.3А, коэффициент KP усиления и коэффициент KI интегрирования дискретного пропорционально-интегрального регулятора 325 выбирают таким образом, что нулевые точки регулятора в передаточной функции GR(z) регулятора согласно уравнению (19) компенсируют комплексно сопряженный объектный полюс передаточной функции G(z) объекта согласно уравнению (22). Сопоставление коэффициентов в уравнениях (19) и (22) при z1 приводит к условию назначения параметров согласно уравнению (29):

Сопоставление коэффициентов при z0 приводит к условию назначения параметров согласно уравнению (30):

Согласно одному варианту выполнения демпфирование s0 осциллятора 190 и период Т дискретизации выбирают таким образом, что имеет место s0·T<<1, так что с достаточной точностью имеют силу приближения согласно (31a) и (31b):


При помощи приближений согласно уравнениям (31a) и (31b) могут быть приближенно представлены оба независимых условия назначения параметров согласно уравнениям (29) и (30) при помощи одного условия назначения параметров согласно уравнению (32):

Согласно одному варианту выполнения отношение коэффициента KI интегрирования к коэффициенту KP усиления устанавливают равным или приблизительно равным демпфированию s0 осциллятора.
Назначение параметров дискретного пропорционально-интегрального регулятора 325 согласно описанному способу, который предусматривает компенсацию объектного полюса посредством нулевой точки регулятора, приводит к хорошей характеристике при задающем воздействии замкнутого контура.
Согласно другому варианту выполнения способа изготовления регулирующего модуля, который включает в себя назначение параметров дискретного пропорционально-интегрального регулятора 325, коэффициент KI интегрирования и коэффициент KP усиления определяют посредством соответствующего задания собственных значений для системы, образованной из дискретного пропорционально-интегрального регулятора 325 и дискретной модели с первичной полосой частот осциллятора 190. Для этого вначале применяют модель G′0(s) с первичной полосой частот, эквивалентную модели G0(s) осциллятора согласно уравнению (1):

Параметры эквивалентной модели с первичной полосой частот согласно уравнению (33) определяют согласно уравнению (34) таким образом, что значение G′0(s) при ω=0 совпадает со значением G0(s) при ω=ω0

Согласно одному варианту выполнения осциллятор 190 реализован таким образом, что имеет место ω0>>s0, и взаимосвязь между параметрами А и А′ может быть с хорошим приближением описана уравнением (35):

Аналогично уравнению (21) для дискретизации эквивалентной модели G′0(s) c первичной полосой частот получается уравнение (36):

Из уравнений (33) и (36) получается эквивалентная дискретизированная модель с первичной полосой частот согласно уравнению (37):

На фиг.3D показана дискретизированная модель 190а с первичной полосой частот осциллятора 190 согласно уравнению (37), а также модель 325а дискретного пропорционально-интегрального регулятора 325 для гармонических задающих величин согласно фиг.3А с функциональными подмодулями. Выходной сигнал модели 325а регулятора возвращают на вход дискретизированной модели 190а с первичной полосой частот. Функциональные подмодули модели 325а регулятора могут быть полностью или частично реализованы исключительно при помощи аппаратного обеспечения, например, интегрированных коммутационных схем, FPGA (программируемых логических матриц), ASIC (специализированных интегрированных коммутационных схем) или DSP (цифровых процессоров сигналов), исключительно при помощи программного обеспечения, которое, например, установлено в DSP или в компьютере, или при помощи комбинации аппаратного и программного обеспечения.
Показанная на фиг.3D система, содержащая дискретизированную модель с первичной полосой частот и модель 325а регулятора, может быть описана посредством модели состояния согласно уравнениям (38а), (38b):


Расчет определителя det(z·I-Ф) приводит к характеристическому полиному этой системы согласно уравнению (39b):


Расчет нулевых точек характеристического полинома согласно уравнению (39b) дает собственные значения λ1, λ2 регулируемой системы, для которой характеристический полином в общем случае может быть представлен в форме уравнения (40):

Посредством сопоставления коэффициентов уравнений (39b) и (40) коэффициенты регулятора получаются в зависимости от задаваемых собственных значений λ1, и λ2 из уравнений (41a) и (41b):


Уравнения (41a) и (41b) приводят к уравнениям (42a) и (42b), при помощи которых из параметров эквивалентной дискретной модели с первичной полосой частот и заданных собственных значений могут быть определены коэффициенты r1 и r2 модели 325a регулятора:


Коэффициент KP усиления и коэффициент KI интегрирования регулирующего модуля 220 согласно фиг.3А определяются из коэффициентов r1 и r2 модели 325a регулятора согласно фиг.3D при помощи уравнений (43a) и (43b):


Согласно одному варианту выполнения собственные значения λ1, λ2 задают с не слишком высокими требованиями в отношении динамики, так что переходный процесс системы с первичной полосой частот с хорошим приближением описывает огибающая переходного процесса эквивалентной системы с полосовым фильтром. При этом имеет место возможность передачи расчетной первичной полосы частот в систему с полосовым фильтром лишь приближенно, так как вследствие времени запаздывания регулятора выравнивание фазы системы с диапазоном полосового фильтра по отношению к системе с первичной полосой частот действует как дополнительное время запаздывания, которое при этом расчете регулятора остается неучтенным. Поэтому при задании собственных значений со слишком высокими требованиями в отношении динамики система с диапазоном полосового фильтра может быть нестабильной, хотя эквивалентная система с первичной полосой частот является стабильной. Однако благодаря применению критерия стабильности Найквиста всегда может быть оценена стабильность разработанной системы с диапазоном полосового фильтра для соответственно заданных собственных значений.
Если способ назначения параметров регулятора предусматривает задание собственных значений, то тем самым задается также положение обоих собственных значений друг по отношению к другу. В противоположность этому, при назначении параметров пропорционально-интегрального регулятора для гармонических задающих величин посредством компенсации полюса и нулевых точек может произойти сильное отклонение обоих собственных значений друг от друга, так что сокращенный объектный полюс остается в качестве собственного значения в замкнутом контуре и при обычно низком демпфировании осциллятора приводит к большой постоянной времени. Хотя «сокращенное» собственное значение не оказывает влияния на характеристику при задающем воздействии, однако вследствие возмущений может происходить возбуждение, имеющее следствием продолжительные процессы затухания. В противоположность этому, разработка посредством задания собственных значений дает возможность задания обоих собственных значений примерно одинакового порядка величины и, таким образом, положительного влияния на характеристику при возмущающем воздействии. Согласно одному варианту выполнения оба собственных значения устанавливают равными или приблизительно равными, с отклонением максимум 10% по отношению к наибольшему собственному значению.
Следующий вариант выполнения иллюстрирует описанный выше способ разработки пропорционально-интегрального регулятора 325, применяемого для объекта регулирования со следующими параметрами:
ω0=2·π·900 Гц



Так как вызванная временем запаздывания объекта фаза при резонансной круговой частоте ω0 меньше 90°, фазовая компонента в размере 180° может быть реализована при помощи инвертирующего регулятора (отрицательный знак в регуляторе). При этом для времени βDT запаздывания регулятора при помощи уравнения (24b) получается условие назначения параметров согласно уравнению (44):

Согласно способу, в котором предусмотрено назначение параметров дискретного пропорционально-интегрального регулятора 325 посредством компенсации полюса и нулевых точек, может быть, например, аналогично варианту, показанному на фиг.2C, применен коэффициент KP усиления со значением 
На фиг.3C в левой колонке сверху вниз показаны количественные частотные характеристики для объекта регулирования, регулятора, скорректированного открытого контура и замкнутого контура, а в правой колонке показаны соответствующие фазово-частотные характеристики для рассчитанного варианта выполнения. Из частотной характеристики замкнутого контура может быть выведена ширина полосы частот в размере примерно 500 Гц в пределах границ 3 дБ.
Если, в противоположность этому, параметры дискретного пропорционально-интегрального регулятора 325 назначают путем задания собственных значений, то, например, собственные значения выбирают с одинаковой величиной, таким образом, что замкнутый контур эквивалентной системы с первичной полосой частот имеет двойное вещественное собственное значение при λ1=λ2=0,98. При этом из уравнений (42a) и (42b) получаются коэффициенты регулятора r1=0,14004655 и r2=1,41471261·10-3. С учетом отрицательного знака, требующегося для компенсации фазы, для коэффициента КР усиления и коэффициента KI интегрирования дискретного пропорционально-интегрального регулятора 325 получаются значения KP=-0,14004655 и KI·T=-1.41471261·10-3.
На фиг.3Е на верхней диаграмме показана реакция на ступенчатое воздействие регулируемой при помощи такого дискретного пропорционально-интегрального регулятора системы с диапазоном полосового фильтра в виде сплошной линии, а также реакция на ступенчатое воздействие эквивалентной системы с первичной полосой частот в виде точечной линии, которая приближенно соответствует верхней ветви огибающей реакции на ступенчатое воздействие дискретного пропорционально-интегрального регулятора. Внизу слева показана количественная частотная характеристика замкнутой системы с диапазоном полосового фильтра, а справа рядом с ней соответствующая фазово-частотная характеристика, из которой, например, может быть выведена ширина полосы частот замкнутого контура.
Фиг.4A-4C относятся к варианту выполнения, при котором регулирующий модуль 320 имеет дополнение 328 регулятора, расположенное последовательно с пропорционально-интегральным регулятором 325 и звеном 326 с запаздыванием согласно фиг.3А. Ниже структура дополнения 328 регулятора выведена из аналогичного дополнения регулятора для первичной полосы частот.
Например, осциллятор 190 наряду с резонансной круговой частотой ω0 может иметь еще дополнительные резонансы, например, механические структурные резонансы выше или ниже резонансной круговой частоты ω0. Дополнение 328 регулятора рассчитано таким образом, что оно сильнее демпфирует эти дополнительные резонансы. С этой целью в первичной полосе частот традиционного пропорционально-интегрального регулятора добавлено звено с запаздыванием первого порядка (звено PT1) с дополнительным полюсом при частоте перегиба за пределами желаемой ширины полосы частот. Этот дополнительный полюс регулятора осуществляет то, что регулятор при высоких частотах уже не действует как пропорциональное звено, а его количественная частотная характеристика спадает с величиной 20 дБ на десятичный разряд. Реакция y(k) на ступенчатое воздействие такого дополнения в первичной полосе частот получается из скачкообразной функции σ(k), действующей в качестве входного сигнала u(k), согласно уравнению (45):

Z-трансформанта U(z) входного сигнала u(k) соответствует z-трансформанте скачкообразного сигнала:

Z-трансформанта Y(z) выходного сигнала у(к) получается согласно уравнению (46b):

В соответствии с этим, аналогично уравнению (10), для передаточной функции GRE0(z) такого дополнения регулятора в первичной полосе частот получается:

Согласно одному варианту выполнения по аналогии с дополнением регулятора в первичной полосе частот дополнение 328 регулятора в диапазоне полосового фильтра выполнено таким образом, что оно отвечает на подачу гармонического колебания с резонансной круговой частотой ω0, модулированного скачкообразной функцией, гармоническим колебанием с такой же частотой, при этом реакция на ступенчатое воздействие дополнения в первичной полосе частот задает огибающую, которая показана на правой стороне фиг.4В.
На фиг.4В показано преобразование синусно модулированной скачкообразной функции u(k) в выходной сигнал с синусоидальным колебанием, огибающая которого получается из реакции на ступенчатое воздействие в соответствии с передаточной функцией GRE0(z) дискретного дополнения регулятора в диапазоне полосового фильтра. Входной сигнал дополнения 328 регулятора в диапазоне полосового фильтра с передаточной функцией GRE(z) получается согласно уравнению (48):

Выходным сигналом y(k) регулятора является гармоническое колебание, огибающая которого соответствует реакции на ступенчатое воздействие дополнения PT1 регулятора в первичной полосе частот:

Z-трансформанты U(z) и Y(z) получаются согласно уравнениям (50a) и (50b):


Передаточная функция GRE(z) дополнения 328 регулятора для диапазона полосового фильтра получается согласно уравнению (51):

Дополнение 328 регулятора с передаточной функцией GRE(z) действует последовательно с дискретным пропорционально-интегральным регулятором 325, аналогично полосовому фильтру первого порядка с резонансной круговой частотой ω0 в качестве средней частоты. Величина и фаза скорректированного открытого контура при резонансной круговой частоте ω0 остаются неизменными в узкой области вокруг резонансной круговой частоты ω0 согласно уравнению (52):

В этой области почти не оказывается влияния на количественную частотную характеристику скорректированного открытого контура, в то время как вне этой области происходит существенное снижение величины, так что возможные нежелательные резонансы могут быть уменьшены. На фиг.4C показаны количественная частотная характеристика, а также фазово-частотная характеристика дополнения регулятора для временного интервала 
Фиг. 5А-5С относятся к микромеханическому датчику 500 мгновенной угловой скорости согласно следующему варианту выполнения. Датчик 500 мгновенной угловой скорости включает в себя подвешенный на первых пружинных элементах 541 модуль 590 возбуждения, например, раму возбуждения. Первые пружинные элементы 541 присоединяют модуль 590 возбуждения к подвешивающей структуре 551, которая неподвижно соединена с несущей подложкой 550, показанной на фиг. 5 В. Пружинные элементы 541 демпфируют отклонение модуля 590 возбуждения по отношению к несущей подложке 550 вдоль направления 501 возбуждения лишь незначительно. Посредством вторых пружинных элементов 542 к модулю 590 возбуждения присоединен модуль 580 детектирования, который является подвижным по отношению к модулю 590 возбуждения в основном вдоль направления 502 детектирования, перпендикулярного к направлению 501 возбуждения. Направления 501, 502 возбуждения и детектирования проходят параллельно поверхности несущей подложки 550. Первым и вторым пружинными элементами 541, 542 являются, например, аналогичные балкам структуры с малым поперечным сечением, которые соответственно выполнены между соединяемыми структурами.
Согласно одному варианту выполнения датчик 500 мгновенной угловой скорости включает в себя первые модули 561, 571 датчиков силы и чувствительных элементов, например, электростатические датчики силы и чувствительные элементы, которые возбуждают колебания системы, образованной из модуля 590 возбуждения и модуля 580 детектирования, вдоль направления 501 возбуждения и/или обеспечивают возможность регистрации соответствующего отклонения модуля 590 возбуждения. Кроме того, датчик 500 мгновенной угловой
скорости включает в себя вторые модули 562, 572 датчиков силы и чувствительных элементов, например, электростатические датчики силы и чувствительные элементы, которые воздействуют на модуль 580 детектирования и/или обеспечивают возможность регистрации его отклонения. Согласно одному варианту выполнения по меньшей мере один из вторых модулей 562, 572 датчиков силы и чувствительных элементов подвергают управлению таким образом, что он противодействует отклонению модуля 580 детектирования, вызванному возмущающей величиной или, для системы с замкнутым контуром, измеряемой величиной.
При работе датчика 500 мгновенной угловой скорости первые модули 561, 571 датчиков силы и чувствительных элементов возбуждают, например, колебания модуля 590 возбуждения вдоль направления 501 возбуждения, при этом модуль 580 детектирования перемещается совместно с модулем 590 возбуждения приблизительно с такими же амплитудой и фазой. Если конструкция поворачивается вокруг оси, перпендикулярной к плоскости подложки, то на модуль 590 возбуждения и модуль 580 детектирования воздействует кориолисова сила, которая отклоняет модуль 580 детектирования по отношению к модулю 590 возбуждения в направлении 502 детектирования. Вторые модули 562, 572 датчиков силы и чувствительных элементов регистрируют отклонение модуля 580 детектирования и, таким образом, вращательное движение вокруг оси, перпендикулярной к плоскости подложки.
Согласно одному варианту выполнения по меньшей мере один из модулей 561, 571, 562, 572 датчиков силы и чувствительных элементов действует в качестве исполнительного органа, а либо модуль 590 возбуждения, либо модуль 580 детектирования действуют в качестве осциллятора в смысле одного из устройств 200, описанных выше.
Согласно варианту выполнения датчика 500 мгновенной угловой скорости, показанному на фиг.5C, первые модули 561, 571 датчиков силы и чувствительных элементов возбуждают, например, колебания модуля 590 возбуждения с резонансной круговой частотой ω0 вдоль направления 501 возбуждения. При этом в регулирующем контуре описанного выше типа колебание модуля 580 детектирования вдоль направления 502 детектирования (осциллятор ×2) может, например, соответствовать гармоническому силовому сигналу, как это описано выше.
Отклонение осциллятора ×2 может регистрироваться при помощи заряда на общих подвижных электродах, которые выполнены на модуле 590 возбуждения. Заряд может сниматься через одну из подвешивающих структур 551. Модуль 521 усиления заряда усиливает снятый сигнал. В то время как снятый сигнал с частотой, которая, например, соответствует резонансной круговой частоте ω0, обычно демодулируют при помощи модуля демодуляции, перед тем, как он будет подведен к модулю регулятора, в вариантах выполнения изобретения предусмотрено подведение к регулирующему модулю 520 описанного выше типа немодулированного гармонического сигнала, служащего в качестве измерительного сигнала в описанном выше смысле.
Действующее на колебание демпфирование s0 существенно меньше, чем резонансная круговая частота ω0. Снятый через раму возбуждения или же через модуль 590 возбуждения сигнал частично отображает перемещение модуля 590 возбуждения вдоль направления 501 возбуждения. Возмущающая величина, источник которой может быть расположен вне датчика 500 мгновенной угловой скорости, или же, в системе с замкнутым контуром, измеряемая величина, накладывается на колебание и модулирует его амплитуду. Регулирующий модуль 520 выводит из модулированного гармонического сигнала управляющий сигнал для вторых модулей 562, 572 датчиков силы и чувствительных элементов, который вызывает их противодействие отклонению, вызванному возмущающей величиной или же измеряемой величиной. Усилительный модуль 522 преобразует управляющий сигнал в соответствующий возвращающий сигнал для электродов вторых модулей 562, 572 датчиков силы и чувствительных элементов. Выполнение и параметры регулирующего модуля 520 соответствуют одному из регулирующих модулей 220, описанных выше. Если амплитудная модуляция гармонического сигнала отображает измеряемую величину, то может быть предусмотрен модуль демодулятора, который путем демодуляции гармонического управляющего сигнала с резонансной круговой частотой ω0 вырабатывает сигнал мгновенной угловой скорости.
Датчик 505 мгновенной угловой скорости, показанный на фиг.6, отличается от датчика 500 мгновенной угловой скорости, показанного на фиг.5A, наличием кориолисова модуля 585, расположенного между модулем 590 возбуждения и модулем 580 детектирования. Вторые пружинные элементы 542, которые присоединяют кориолисов модуль 585 к модулю 590 возбуждения, допускают отклонение кориолисова модуля 585 по отношению к модулю 590 возбуждения в направлении 502 детектирования. Третьи пружинные элементы 543, которые частично могут быть соединены с несущей подложкой 550, присоединяют модуль 580 детектирования к кориолисову модулю 585 таким образом, что модуль 580 детектирования может следовать за перемещением кориолисова модуля 585 вдоль направления 502 детектирования, но не вдоль направления 501 возбуждения. Модуль 580 детектирования зафиксирован в направлении 501 возбуждения и является подвижным в направлении 502 детектирования.
Согласно другим вариантам выполнения по меньшей мере один из первых или вторых модулей 561, 562, 571, 572 датчиков силы и чувствительных элементов действует в качестве исполнительного органа, а либо модуль 590 возбуждения, либо модуль 580 детектирования, или же как модуль 590 возбуждения, так и модуль 580 детектирования, действуют в качестве осциллятора в смысле одного из описанных выше устройств, которые работают согласно описанному принципу регулятора с полосовым фильтром. При этом модули 561 и 572 действуют в качестве модулей датчиков силы и чувствительных элементов для осциллятора ×1, а модули 562 и 572 действуют в качестве модулей датчиков силы и чувствительных элементов для осциллятора ×2.
Датчик мгновенной угловой скорости согласно другому варианту выполнения включает в себя две показанных на фиг.5A или на фиг.6 конструкции, которые соединены друг с другом таким образом, что в стационарном состоянии модули возбуждения совершают противоположные друг другу колебания. Другие варианты выполнения относятся к датчикам мгновенной угловой скорости, содержащим четыре показанных на фиг.5A или на фиг.6 конструкции, которые соединены друг с другом таким образом, что в стационарном состоянии соответственно два из модулей возбуждения совершают противоположные друг другу колебания.
Следующий вариант выполнения относятся к регулирующему модулю 220, показанному на фиг.2A, 3А и 4А. Регулирующий модуль 220 включает в себя по меньшей мере один пропорционально-интегральный регулятор 225, 325 для гармонических задающих величин, который со своей стороны содержит пропорциональное передаточное звено 224, 324 и расположенное параллельно нему интегрирующее передаточное звено 222, 322, при этом вход регулирующего модуля 220 соединен с обоими передаточными звеньями 222, 224, 322, 324. Передаточная функция пропорционально-интегрального регулятора 225, 325 для гармонических задающих величин имеет комплексно сопряженный полюс при круговой частоте ωr регулятора в плоскости s или полюс при 
Для этого коэффициент интегрирования интегрирующего передаточного звена 222, 322 и коэффициент усиления пропорционального передаточного звена 224, 324 выбраны таким образом, что пропорционально-интегральный регулятор 225, 325 для гармонических задающих величин при подаче на вход регулятора модулированного скачкообразной функцией гармонического входного сигнала с круговой частотой ωr регулятора может вырабатывать на выходе регулятора гармоническое колебание с круговой частотой ωr регулятора и с возрастающей амплитудой.
Пропорционально-интегральный регулятор 225, 325 для гармонических задающих величин можно понимать как регулятор, полученный из традиционного пропорционально-интегрального регулятора для стационарных задающих величин, и отличается от него положением полюсов в плоскостях s или же z.
Фиг.7A относится к способу эксплуатации датчика мгновенной угловой скорости. При работе датчика мгновенной угловой скорости чувствительный элемент вырабатывает измерительный сигнал (702), который отображает отклонение осциллятора. Из измерительного сигнала регулирующий модуль вырабатывает управляющий сигнал (704) для исполнительного органа, который противодействует отклонению осциллятора от гармонического колебания с резонансной круговой частотой ω0. Для этого регулирующий модуль имеет пропорционально-интегральный регулятор, содержащий пропорциональное передаточное звено и расположенное параллельно нему интегрирующее передаточное звено, при этом вход регулирующего модуля соединен с обоими передаточными звеньями. Передаточная функция пропорционально-интегрального регулятора имеет комплексно сопряженный полюс при резонансной круговой частоте ω0 осциллятора в плоскости s или полюс при 
Фиг.7B относится к способу изготовления датчика мгновенной угловой скорости. Способ включает в себя назначение параметров регулирующего модуля, имеющего пропорционально-интегральный регулятор, содержащий пропорциональное передаточное звено и расположенное параллельно нему интегрирующее передаточное звено, при этом вход регулирующего модуля соединен с обоими передаточными звеньями. Пропорционально-интегральный регулятор выполнен с передаточной функцией (752), которая имеет комплексно сопряженный полюс при круговой частоте ωr регулятора в плоскости s или полюс при 
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО, ДАТЧИК УГЛОВОЙ СКОРОСТИ И СПОСОБ ЭКСПЛУАТАЦИИ РЕГУЛИРУЮЩЕГО УСТРОЙСТВА С ГАРМОНИЧЕСКИМ СИГНАЛОМ НОМИНАЛЬНОГО ЗНАЧЕНИЯ | 2012 |
|
RU2599281C2 |
| РЕГУЛИРОВАНИЕ ЧАСТОТЫ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ ЧАСОВ ПУТЕМ ВОЗДЕЙСТВИЯ НА АКТИВНУЮ ДЛИНУ ПРУЖИНЫ БАЛАНСА | 2015 |
|
RU2590873C1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СПОСОБ ПОДДЕРЖАНИЯ РАБОТЫ И РЕГУЛИРОВАНИЯ ЧАСОВОГО РЕЗОНАТОРА | 2015 |
|
RU2663089C1 |
| ИЗМЕРИТЕЛЬНАЯ ЭЛЕКТРОНИКА И СПОСОБЫ ДЛЯ ПОВЕРОЧНОЙ ДИАГНОСТИКИ ДЛЯ РАСХОДОМЕРА | 2005 |
|
RU2376558C1 |
| Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором | 2018 |
|
RU2670328C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |







Изобретение относится к регулирующему модулю для возврата в исходное состояние отклонения осциллятора, к устройству, включающему в себя такой регулирующий модуль, и к способу эксплуатации и изготовления такого датчика. Технический результат - повышение характеристик регулятора в переходном периоде, вызванном возмущающей величиной отклонения осциллятора. Регулирующий модуль содержит пропорционально-интегральный регулятор для гармонических задающих величин. Передаточная функция пропорционально-интегрального регулятора для гармонических задающих величин имеет комплексно сопряженный полюс при круговой частоте ωr регулятора в плоскости s или полюс при 
1. Регулирующий модуль (220), содержащий: пропорционально-интегральный регулятор (225, 325), содержащий пропорциональное передаточное звено (224, 324) и расположенное параллельно нему интегрирующее передаточное звено (222, 322),
при этом вход регулирующего модуля (220) соединен с обоими передаточными звеньями (222, 224, 322, 324),
отличающийся тем, что
передаточная функция пропорционально-интегрального регулятора (225, 325) имеет комплексно сопряженный полюс при круговой частоте ωr регулятора в плоскости s или полюс при 
при этом Т является периодом дискретизации дискретного входного сигнала пропорционально-интегрального регулятора (225, 325), а ωr>0.
2. Регулирующий модуль по п. 1, в котором коэффициент интегрирования интегрирующего передаточного звена (222, 322) и коэффициент усиления пропорционального передаточного звена (224, 324) выбраны таким образом, что при подаче на вход регулятора модулированного скачкообразной функцией гармонического входного сигнала с круговой частотой ωr регулятора пропорционально-интегральный регулятор (225, 325) подходит для вырабатывания на выходе регулятора гармонического колебания с круговой частотой ωr регулятора и с возрастающей амплитудой.
3. Осцилляционное устройство, содержащее:
подвижно установленный осциллятор (190), который выполнен с возможностью возбуждения колебаний с резонансной круговой частотой ω0 в направлении возбуждения, и
регулирующий модуль (220) по п. 2, при этом круговая частота ωr регулятора равна резонансной круговой частоте ω0.
4. Устройство по п. 3, в котором
коэффициент интегрирования и коэффициент усиления выбраны таким образом, что нулевые точки передаточной функции пропорционально-интегрального регулятора (225, 325) компенсируют полюса передаточной функции осциллятора (190).
5. Устройство по одному из пп. 3 и 4, в котором
пропорционально-интегральный регулятор является непрерывным пропорционально-интегральным регулятором (225), а
отношение коэффициента интегрирования к коэффициенту усиления равно демпфированию s0 осциллятора (190) в направлении возбуждения.
6. Устройство по п. 5, в котором
объект регулирования, включающий в себя осциллятор (190), имеет время TS запаздывания объекта,
регулирующий модуль (220) включает в себя расположенное последовательно с пропорционально-интегральным регулятором (225) звено (226) с запаздыванием, имеющее время TR запаздывания регулятора, и
либо пропорционально-интегральный регулятор (225) является инвертирующим регулятором, и произведение резонансной круговой частоты ω0 и суммы времени TS запаздывания объекта и времени TR запаздывания регулятора равно 
либо пропорционально-интегральный регулятор (225) является не инвертирующим регулятором, и произведение резонансной круговой частоты ω0 и суммы времени TS запаздывания объекта и времени TR запаздывания регулятора равно 
7. Устройство по одному из пп. 3 и 4, в котором
пропорционально-интегральным регулятором является дискретный пропорционально-интегральный регулятор (325), который выполнен с возможностью подачи на него дискретного входного сигнала, происходящего вследствие дискретизации с периодом Т,
осциллятор (190) имеет в направлении возбуждения демпфирование s0, а отношение коэффициента интегрирования к коэффициенту усиления равно отношению 
8. Устройство по одному из пп. 3 и 4, в котором
пропорционально-интегральным регулятором является дискретный пропорционально-интегральный регулятор (325), который выполнен с возможностью подачи на него дискретного входного сигнала, происходящего вследствие дискретизации с периодом Т, а
коэффициент интегрирования и коэффициент усиления выбраны таким образом, что передаточная функция замкнутого контура эквивалентной системы с первичной полосой частот имеет двойное вещественное собственное значение.
9. Устройство по п. 7, в котором
объект регулирования, включающий в себя осциллятор (190, 590), имеет время βS·T запаздывания объекта, причем βS представляет собой коэффициент запаздывания объекта,
регулирующий модуль (220) включает в себя расположенное последовательно с дискретным пропорционально-интегральным регулятором (325) звено (326) с запаздыванием, имеющее время βD·Т запаздывания регулятора, причем βD представляет собой коэффициент запаздывания регулятора, и
либо дискретный пропорционально-интегральный регулятор (325) является инвертирующим регулятором, и произведение резонансной круговой частоты ω0 и суммы времени βS·Т запаздывания объекта, времени βD·Т запаздывания регулятора и половины периода дискретизации 

либо дискретный пропорционально-интегральный регулятор (325) является не инвертирующим регулятором, и произведение резонансной круговой частоты ω0 и суммы времени βS·Т запаздывания объекта, времени βD·Т запаздывания регулятора и половины периода дискретизации 

10. Устройство по одному из пп. 3-4, 6, 9, отличающееся наличием расположенного последовательно с пропорционально-интегральным регулятором (225, 325) дополнения (328) регулятора, которое действует в качестве полосового фильтра со средней частотой при резонансной круговой частоте ω0.
11. Устройство по п. 10, в котором
передаточная функция GRE(z) дополнения (328) регулятора с шириной полосового фильтра 

12. Устройство по одному из пп. 3-4, 6, 9, 11, в котором
устройством является датчик (500, 505) мгновенной угловой скорости, а осциллятором - модуль (590) возбуждения, кориолисов модуль (585) или модуль (580) детектирования датчика (500, 505) мгновенной угловой скорости, при этом
модуль (590) возбуждения выполнен с возможностью отклонения при помощи датчика (561) силы вдоль направления возбуждения и предназначен для колебания с резонансной круговой частотой ω0,
кориолисов модуль (585) закреплен на модуле (590) возбуждения таким образом, что он следует за перемещением модуля (590) возбуждения вдоль направления возбуждения и дополнительно является подвижным вдоль направления детектирования, перпендикулярного к направлению возбуждения, и
модуль (580) детектирования закреплен на модуле (590) возбуждения или на кориолисовом модуле (585) таким образом, что модуль (580) детектирования либо
следует за перемещением модуля (590) возбуждения вдоль направления возбуждения и дополнительно является подвижным вдоль направления детектирования, перпендикулярного к направлению возбуждения, либо
следует за перемещением кориолисова модуля (585) вдоль направления детектирования, перпендикулярного к направлению возбуждения, и зафиксирован вдоль направления возбуждения.
13. Датчик мгновенной угловой скорости, содержащий:
подвижно установленный осциллятор (190), который выполнен с возможностью возбуждения колебаний с резонансной круговой частотой ω0 в направлении возбуждения, и
регулирующий модуль (220), включающий в себя пропорционально-интегральный регулятор (225, 325), содержащий пропорциональное передаточное звено (224, 324) и расположенное параллельно нему интегрирующее передаточное звено (222, 322),
при этом вход регулирующего модуля (220) соединен с обоими передаточными звеньями (222, 224, 322, 324),
отличающийся тем, что
передаточная функция пропорционально-интегрального регулятора (225, 325) имеет комплексно сопряженный полюс при резонансной круговой частоте ω0 в плоскости s или полюс при 
при этом Т является периодом дискретизации дискретного входного сигнала пропорционально-интегрального регулятора (225, 325), а ω0>0.
14. Датчик мгновенной угловой скорости по п. 13, в котором
осциллятором является модуль (590) возбуждения, который выполнен с возможностью отклонения при помощи датчика (561) силы вдоль направления возбуждения и предназначен для колебания с резонансной круговой частотой ω0.
15. Способ эксплуатации датчика мгновенной угловой скорости, согласно которому:
вырабатывают при помощи чувствительного элемента (170) измерительный сигнал, отображающий отклонение осциллятора (190), и
вырабатывают из измерительного сигнала управляющий сигнал для исполнительного органа (180), который противодействует отклонению осциллятора (190) от гармонического колебания с резонансной круговой частотой ω0,
причем управляющий сигнал получают из измерительного сигнала при помощи регулирующего модуля (220), а регулирующий модуль (220) включает в себя пропорционально-интегральный регулятор (225, 326), содержащий пропорциональное передаточное звено (224, 324) и расположенное параллельно нему интегрирующее передаточное звено (222, 322),
вход регулирующего модуля (220) соединен с обоими передаточными звеньями (222, 224, 322, 324), а
передаточная функция пропорционально-интегрального регулятора (225, 325) имеет комплексно сопряженный полюс при резонансной круговой частоте ω0 в плоскости s или полюс при 
при этом Т является периодом дискретизации дискретного входного сигнала пропорционально-интегрального регулятора (225, 325).
16. Способ изготовления датчика мгновенной угловой скорости, согласно которому:
назначают параметры регулирующего модуля (220), включающего в себя пропорционально-интегральный регулятор (225, 325), содержащий пропорциональное передаточное звено (224, 324) и расположенное параллельно нему интегрирующее передаточное звено (222, 322),
при этом вход регулирующего модуля (220) соединен с обоими передаточными звеньями (222, 224, 322, 324),
отличающийся тем, что
пропорционально-интегральный регулятор (225, 325) выполнен с передаточной функцией, которая имеет комплексно сопряженный полюс при круговой частоте ωr регулятора в плоскости s или полюс при 
при этом Т является периодом дискретизации дискретного входного сигнала пропорционально-интегрального регулятора (225, 325), и ωr>0, а коэффициент интегрирования интегрирующего передаточного звена (222, 322) и коэффициент усиления пропорционального передаточного звена (224, 324) выбирают таким образом, что при подаче на вход регулятора модулированного скачкообразной функцией гармонического входного сигнала с круговой частотой ωr регулятора пропорционально-интегральный регулятор (225, 325) подходит для вырабатывания на выходе регулятора гармонического колебания с круговой частотой ωr регулятора и с возрастающей амплитудой, и
круговую частоту ωr регулятора выбирают таким образом, что она равна резонансной круговой частоте ω0 модуля (590) возбуждения датчика мгновенной угловой скорости.
17. Способ по п. 16, согласно которому коэффициент интегрирования и коэффициент усиления выбирают таким образом, что нулевые точки передаточной функции пропорционально-интегрального регулятора (225, 325) компенсируют полюса передаточной функции модуля (590) возбуждения.
18. Способ по п. 16, согласно которому пропорционально-интегральным (PI) регулятором является дискретный пропорционально-интегральный (PI) регулятор (325), который выполнен с возможностью подачи на него дискретного входного сигнала, образованного вследствие дискретизации с периодом Т, а коэффициент интегрирования и коэффициент усиления выбраны таким образом, что передаточная функция замкнутого контура эквивалентной системы с первичной полосой частот имеет двойное вещественное собственное значение.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| SU 2002289 C1 30.10.1993 | |||
| Электронный аналоговый пропорционально-интегрально-дифференциальный регулятор | 1965 |
|
SU475602A1 |

