Область техники, к которой относится изобретение
Изобретение относится к часовому колебательному механизму, содержащему конструкцию и/или раму и несколько отдельных первичных резонаторов, которые смещены по времени и геометрически и каждый из которых содержит по меньшей мере одну инерционную массу, возвращаемую к упомянутой конструкции или к упомянутой раме с помощью упругого возвратного средства.
Изобретение также относится к часовому механизму, включающему в себя по меньшей мере один такой часовой колебательный механизм.
Изобретение относится к часам, включающим в себя по меньшей мере один такой часовой механизм.
Изобретение относится к области часовых осцилляторов, в частности механических механизмов.
Уровень техники
Большинство механических часов в настоящее время включают в себя швейцарские анкерные спуски. Две основные функции анкерного спуска заключаются в следующем:
- поддержание движения туда и обратно резонатора, образованного системой баланс-спираль;
- подсчет этих движений туда и обратно.
В дополнение к этим двум функциям, анкерный спуск должен оставаться надежным и выдерживать толчки, и он предназначен для того, чтобы предотвращать задержку движения (перебрасывание).
Швейцарский анкерный спуск обладает низкой энергоэффективностью порядка 30%. Причина этой низкой энергоэффективности заключается в том, что движения анкерного спуска являются прерывистыми, и в том, что несколько компонентов передают движение через наклонные плоскости, которые трутся друг о друга.
Во французском патенте 630831 от имени Шайферштейна описан способ и устройство для передачи энергии между механическими системами и для управления механическими системами.
В публикации 2015104693 от имени EPFL описан механический изотропный гармонический осциллятор, который включает в себя по меньшей мере одно соединение с двумя степенями свободы, поддерживающее вращающуюся массу относительно неподвижного основания пружинами, обладающими изотропными свойствами и линейной силой восстановления, причем масса наклоняется. Осциллятор может использоваться в устройстве измерения времени, например, в наручных часах.
Раскрытие изобретения
Задача настоящего изобретения заключается в том, чтобы предложить высокоэффективную анкерную систему. Также предложен осциллятор без осей вращения и без реакций относительно опоры, позволяя достигать очень высокого показателя качества.
Для достижения этой цели изобретение состоит в разработке архитектуры, допускающей непрерывные взаимодействия, без толчков, между резонатором и анкерным колесом. Для достижения этого необходимо сделать возможным использование по меньшей мере второго резонатора, смещенного по фазе относительно первого резонатора.
Для этого, изобретение относится к часовому осциллятору по п. 1 формулы изобретения.
Изобретение также относится к часовому механизму, включающему в себя по меньшей мере один такой часовой колебательный механизм.
Изобретение относится к часам, включающим в себя по меньшей мере один такой часовой механизм.
Краткое описание чертежей
Другие признаки и преимущества изобретения станут очевидными по прочтении последующего подробного описания со ссыпкой на прилагаемые чертежи.
На фиг. 1 показан схематический вид в плане часового осциллятора в соответствии с изобретением, в общем случае с двумя элементарными резонаторами типа масса-пружина, колеблющимися линейно в различных направлениях, массы которых соединены с соединительными стержнями, которые взаимодействуют друг с другом, будучи сочлененными пальцем, который пересекает прорезь колесного узла, на который воздействует приводной крутящий момент, чтобы соединить два элементарных резонатора.
На фиг. 2 показан схематичный вид в плане другого варианта, в котором первичные резонаторы вращают резонаторы типа баланс-спираль.
На фиг. 3 показан схематический вид в плане другого варианта с двумя первичными резонаторами, каждый из которых образован парой элементарных резонаторов, и включает в себя элементарную массу, расположенную на элементарной гибкой упругой полосе в виде спиральной пружины, образующей упругое возвратное средство, и которые устроены так, чтобы работать на изгиб, и установлены на поперечине; таким образом, сочетая эти два элементарных резонатора, каждый первичный резонатор образует изохронный камертонный колебательный механизм в виде рогов козла.
На фиг. 4 показан схематичный вид в перспективе подробностей сочленения соединительных стержней, показанных на фиг. 1-3.
На фиг. 5 также показана конструкция, аналогичная показанной на фиг. 3, в которой гибкие упругие полосы образованы не спиральной пружиной, а короткими прямыми полосами, расположенными с каждой стороны поперечины, с которой они образуют горизонтальную Н-образную планку, где массы образуют вертикальные планки; таким образом, сочетая эти два элементарных резонатора, каждый первичный резонатор образует изохронный Н-образный камертонный колебательный механизм; на этой фиг. 5 показано средство передачи, образованное гибкими полосами, заменяющими соединительные стержни на предыдущих фигурах.
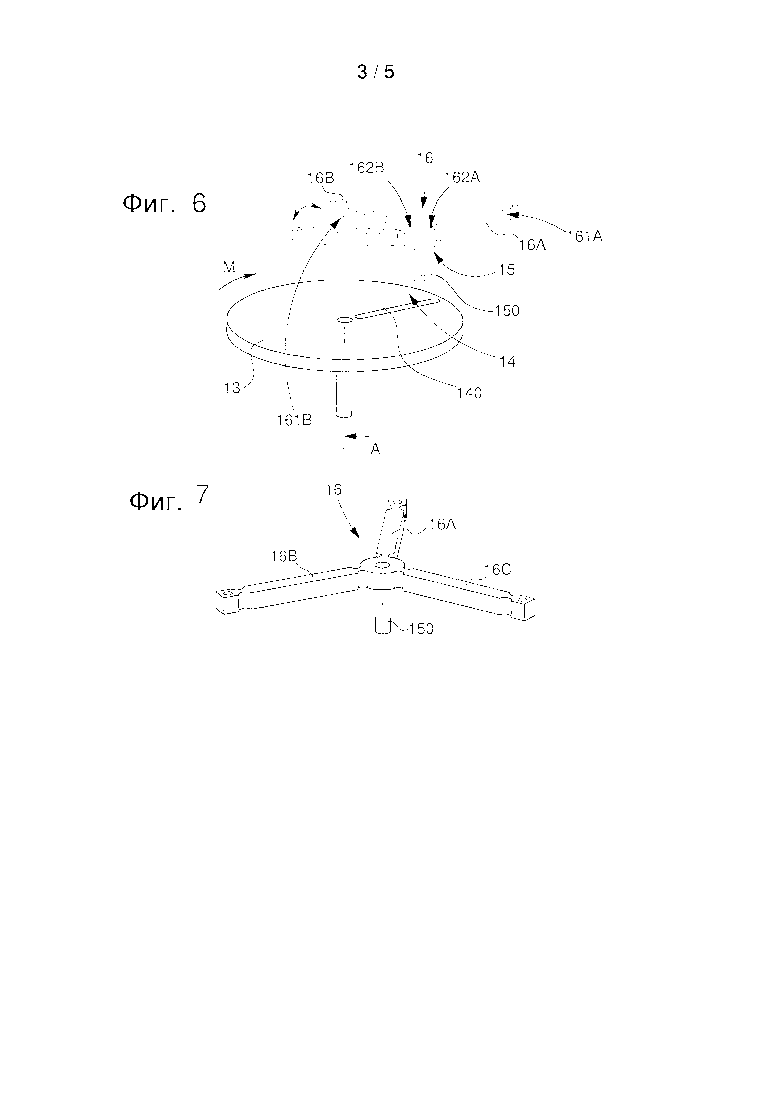
На фиг. 6 и 7 приведены схематичные виды в перспективе вариантов, в которых соединительные стержни представляют собой планки, содержащие шейки с обоих концов вместо ступиц, причем на фиг.6 показан случай соединения двух резонаторов, а на фиг. 7 показано три таких резонатора.
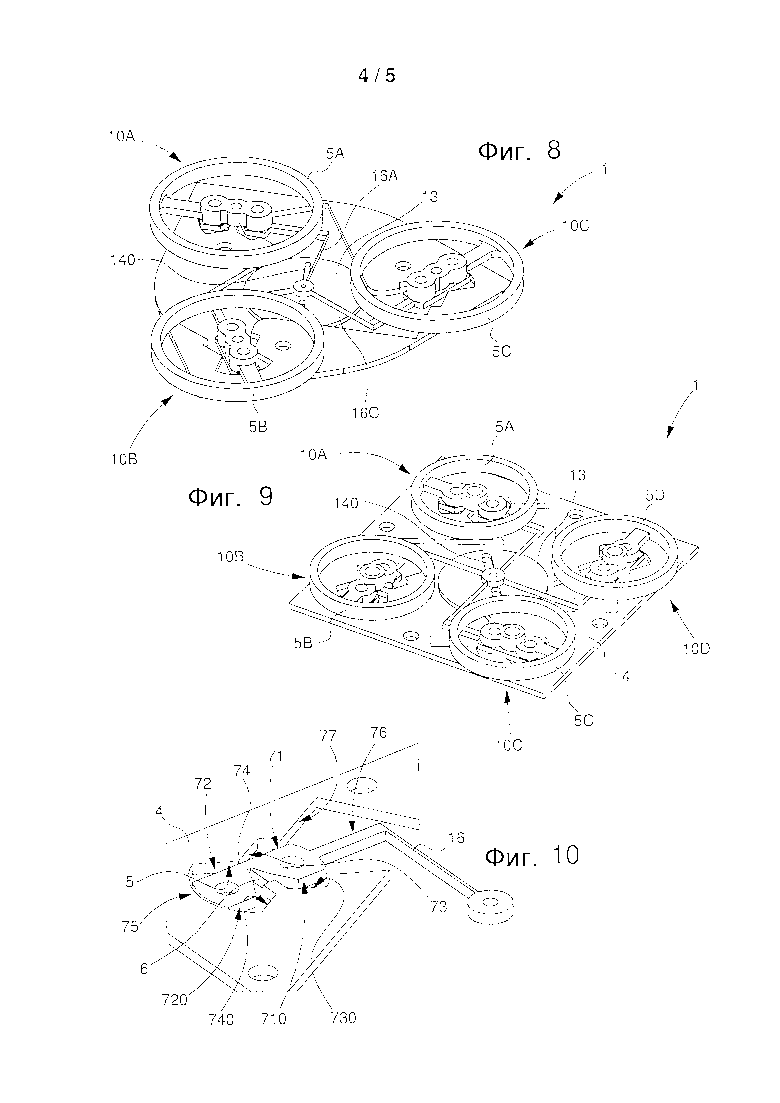
На фиг. 8 показан схематический вид в перспективе часового осциллятора, содержащего три первичных резонатора 1, расположенных треугольником вокруг общего средства управления; на этой фигуре показано применение соединения, изображенного на фиг. 7, с инерционными массами трех первичных резонаторов.
На фиг. 9, аналогично фиг. 8, показан часовой осциллятор, содержащий четыре резонатора.
На фиг. 10 показан схематичный вид в перспективе варианта, в котором упругое возвратное средство также образует вращающийся направляющий элемент, средство передачи образовано гибкой полосой в конфигурации фиг. 9; на этой фигуре также показаны угловые ограничители и ударопрочные ограничители, расположенные на цельном узле, сочетающем раму, короткие гибкие полосы, инерционные массы, средство передачи и сопряжение со средством управления.
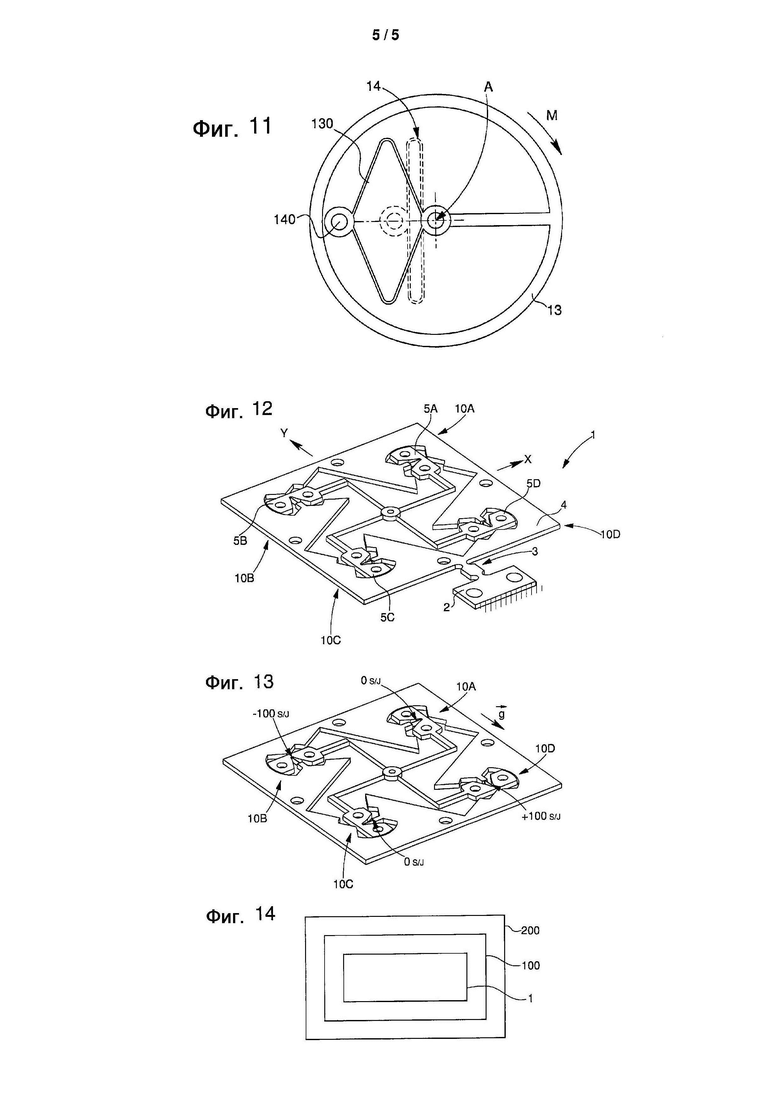
На фиг. 11 показан схематичный вид в плане варианта, в котором колесный узел включает в себя деформируемую упругую конструкцию, образующую гибкий в радиальном направлении и жесткий в направлении по касательной направляющий элемент, содержащий корпус для приема пальца средства управления в главном сочленении, причем деформируемая конструкция показана в двух крайних положениях.
На фиг. 12 показан схематичный вид в перспективе продолжения цельного узла, показанного на фиг. 10, до механизма, содержащего четыре инерционные массы; этот узел увеличен, а также содержит несущую конструкцию и основное упругое соединение для подвешивания рамы к конструкции.
На фиг. 13 показан узел, изображенный на фиг. 10, в гравитационном поле.
На фиг. 14 показана блок-схема часов, включающих в себя механизм, в который входит часовой осциллятор в соответствии с изобретением.
Осуществление изобретения
Изобретение относится к механическим часам 200, оснащенным сбалансированными, смещенными по фазе и непрерывно поддерживаемыми резонаторами.
Изобретение относится к часовому осциллятору 1, содержащему конструкцию 2 и/или раму 4 и несколько отдельных первичных резонаторов 10.
Эти первичные резонаторы 10 являются смещенными по времени и геометрически. Каждый из них включает в себя по меньшей мере одну внутреннюю массу 5, которая возвращается к конструкции 2 или раме 4 под действием упругого возвратного средства 6. Выражение "отдельные резонаторы" означает, что каждый первичный резонатор 10 имеет свою собственную внутреннюю массу 5 и свое собственное упругое возвратное средство 6, в частности пружину.
В соответствии с изобретением этот часовой осциллятор 1 содержит соединительное средство 11, которое устроено так, чтобы допускать взаимодействие первичных резонаторов 10. Колесный узел 13 подвержен воздействию усилия и/или приводного крутящего момента. Это соединительное средство 11 включает в себя приводное средство 12, устроенное так, чтобы выполнять роль привода для одного такого колесного узла 13. Более конкретно, приводное средство 12 устроено так, чтобы приводить в движение колесный узел 13. Колесный узел 13 включает в себя приводное и направляющее средство 14, которое устроено так, чтобы приводить в действие и направлять, предпочтительно принудительно, механическое средство 15 управления. Это средство 15 управления сочленяется с несколькими передаточными средствами 16, каждое из которых на расстоянии от средства 15 управления сочленяется с внутренней массой 5 первичного резонатора 10.
Предпочтительно, первичные резонаторы 10 колеблются вокруг осей, параллельных друг другу.
Изобретение стремится скомпенсировать усилия, действующие на опоры, и для поступательного перемещения, и для вращения, в отличие от существующего уровня техники, при котором обеспечивается компенсация только для поступательного перемещения.
Компенсация вращения представляет собой важную характеристику изобретения; она позволяет осциллятору дольше колебаться и обладать улучшенным фактором качества. Более того, снижается чувствительность к толчкам.
Конечно, удаление сил реагирования, воздействующих на опоры, не является необходимым для работы осциллятора, но оно представляет очень предпочтительную характеристику, так как такое устройство весьма существенно улучшает чувствительность к небольшим ударам.
Кроме того, первичные резонаторы 10 и колесный узел 13 устроены так, что оси сочленений любых двух первичных резонаторов 10 и ось сочленения средства 15 управления никогда не лежат в одной плоскости. Другими словами, проекции этих осей на общую перпендикулярную плоскость никогда не находятся на одной прямой. Понятно, что оси сочленений в некоторых вариантах осуществления могут представлять собой мнимые оси вращения.
В неограничивающих вариантах на фиг. 1-9 колесный узел 13 совершает вращательное движение; более конкретно, приводное средство 12 устроено так, чтобы приводить колесный узел 13 во вращательное движение вокруг оси А вращения. В отдельном варианте осуществления приводное и направляющее средство 14 образовано прорезью 140, в которой передвигается палец 150 средства 15 управления. Предпочтительно, эта прорезь 140 проходит по существу радиально относительно оси А вращения колесного узла 13.
Понятно, что колесный узел 13 заменяет обычное анкерное колесо, и он предпочтительно расположен после группы шестерен, приводимых в движение цилиндром или аналогичным элементом.
Передаточное средство 16, в частности, может иметь форму соединительных стрежней 160, каждый из которых содержит первое сочленение 161 со средством 15 управления и второе сочленение 162 с соответствующей внутренней массой. Первое сочленение 161 и второе сочленение 162 задают направление соединительного стержня. В соответствии с изобретением, в любой момент времени все направления соединительных стержней попарно образуют угол, отличный от 0 или π. Иными словами, векторное произведение двух направлений соединительных стержней отлично от нуля.
В конкретном приложении, передаточное средство 16 не является коллинеарным с соединительными стержнями 160. Колесный узел 13, на который воздействует приводной крутящий момент, и соединительное средство 11 имеют взаимодействующую геометрию, что позволяет передавать по существу направленные по касательной усилия на соединительные стержни 160.
В дальнейшем выражение "элементарные резонаторы" относится к резонаторам, вместе образующим первичный резонатор: они установлены в виде камертона, так что усилия реагирования и отклонения компенсируют друг друга. Если n элементарных резонаторов образуют первичный резонатор, то они являются попарно смещенными по фазе на величину 2π/n.
На фиг. 1 показан общий случай двух элементарных резонаторов 10А и 10В типа масса-пружина, колеблющихся линейно в двух различных направлениях, и имеющих массы 5А и 5В, которые сочленены с соединительными стержнями 16А и 16В, взаимодействующими друг с другом посредством сочленения с помощью пальца 150, который образует средство 15 управления, перемещающееся вдоль прорези 140 колеса, образующего колесный узел 13. Приводное средство изображено на фиг. 4, где показаны подробности сочленения соединительных стержней на средстве 15 управления.
В частности, в предпочтительном, но неограничивающем применении, показанном на фигурах, первичные резонаторы 10 представляют собой вращающиеся резонаторы. Это значит, что по меньшей мере один колесный узел первичного резонатора имеет большую амплитуду колебаний, предпочтительно больше 180° и предпочтительно больше 270°. Этот вращающийся резонатор отличается от углового резонатора полосами, установленными на рычаге, известном из патента FR 630831 существующего уровня техники, в котором колебания полосы ограничены небольшим углом, порядка 30°.
Эти вращающиеся первичные резонаторы 10, в отличие от линейных и угловых резонаторов, не чувствительны к толчкам при поступательном перемещении и к трудностям позиционирования.
На фиг. 2 показан один такой пример, где первичные резонаторы 10А, 10В представляют собой системы баланс-спираль, в которых спиральные пружины 6А, 6В своим внешним витком присоединены к конструкции 2, а своим внутренним витком - к балансам 5А, 5В, которые сочленены с концами 162А, 162В соединительных стержней 16А, 16В, устроенных аналогично показанным на фиг. 1.
Чтобы получить улучшенный показатель качества, осциллятор 1 устроен так, что силы реакции и крутящие моменты всех первичных резонаторов 10 на опоре 2 (или раме 4, если все они прикреплены к такой раме) компенсируют друг друга. Силы компенсируют друг друга, потому что центр масс не перемещается или едва перемещается, когда оси вращения проходят через центр масс. Центр масс по существу совпадает с центром вращения, т.е. отклонение положения составляет всего несколько микрометров или десятков микрометров. Крутящие моменты компенсируются, так как каждый вращающийся компонент компенсируется другим вращающимся в обратную сторону компонентом. Соединение между резонатором может быть получено с помощью подвижной опоры, например, в виде камертона, или посредством соединительных стержней 160 или, в более общем случае, передаточного средства 16. Тогда, соединение первичных резонаторов 10 друг с другом получают посредством подвижной установки каждого первичного резонатора 10 относительно общей конструкции 2 или рамы 4.
Таким образом, предпочтительно, результирующая сил реакции и крутящих моментов первичных резонаторов 10 относительно общей конструкции 2 или рамы 4, к которой они прикреплены, равна нулю, вследствие установки n сдвинутых по фазе резонаторов 10, в частности вращающихся резонаторов.
Для оптимальной работы вращающиеся первичные резонаторы 10 устроены так, что их центры масс остаются неподвижными, по меньшей мере во время нормальных колебаний первичных резонаторов 10. Часовой осциллятор 1 предпочтительно включает в себя ограничитель, ограничивающий его перемещение в случае толчков или тому подобного.
Предпочтительно первичные резонаторы 10 имеют по меньшей мере одну по существу одинаковую резонансную моду; они устроены так, чтобы колебаться с взаимным сдвигом по фазе, имеющим значение 2π/n, где n - число первичных резонаторов, и они расположены в пространстве симметрично, так что результирующая сил и крутящих моментов, оказываемых первичными резонаторами 10 на конструкцию 2 или раму 4, на которой они установлены, равна нулю.
Выражение "по существу одинаковая резонансная мода" означает, что эти первичные резонаторы 10 имеют по существу одну и ту же амплитуду, по существу одну и ту же инертность и по существу одну и ту же собственную частоту. Временной сдвиг по фазе, равный 2π/n, наиболее важен. В конкретном приложении, как видно на фигурах, имеется четное число первичных резонаторов 10, и попарно они образуют пары, в которых инерционные массы 5 находятся в движении со сдвигом по фазе на π друг относительно друга.
В определенном расположении, как видно на фиг. 3 и 5, по меньшей мере один из первичных резонаторов 10 образован из n элементарных резонаторов 810. Каждый из этих элементарных резонаторов 810 включает в себя по меньшей мере одну элементарную массу, расположенную на элементарной гибкой упругой полосе, образующей упругое возвратное средство, которое устроено так, чтобы работать на изгиб, и которое установлено на элементарной поперечине.
Эти элементарные резонаторы 810 имеют по меньшей мере одну по существу одинаковую резонансную моду и устроены так, чтобы колебаться с взаимным сдвигом по фазе на 2π/n, где n - это число элементарных резонаторов 810. Они расположены в пространстве симметрично, так что результирующая сил и крутящих моментов, оказываемых элементарными резонаторами 810 на элементарную поперечину, равна нулю.
Эта элементарная поперечина прикреплена к неподвижной опоре 2 посредством основного упругого соединения, жесткость которого больше, чем жесткость каждой элементарной гибкой упругой полосы, и затухание которого больше, чем затухание каждой элементарной гибкой полосы. Элементарные резонаторы 810 расположены в пространстве так, что результирующая их погрешности вследствие гравитации равна нулю.
Более конкретно, по меньшей мере один из первичных резонаторов 10 образован парой таких элементарных резонаторов 810. В этой паре элементарные инерционные массы находятся в движении с взаимным сдвигом по фазе, равным π.
Еще более конкретно, эта пара образована из идентичных элементарных резонаторов 810, которые находятся друг напротив друга в геометрическом смысле и имеют противоположные фазы.
В специфическом случае на фиг. 3 и 5, каждый первичный резонатор 10 образован одной такой парой элементарных резонаторов 810.
В варианте на фиг. 3 каждый первичный резонатор 10А, 10В, таким образом, сочетая по два элементарных резонатора 8101, 8102, соответственно 8103, 8104, образует изохронный камертонный колебательный механизм в виде рогов козла. Поперечина 40А, соответственно 40В, прикреплена к неподвижной опоре 2 с помощью основного упругого соединения 3А, соответственно 3В, жесткость которого больше, чем жесткость каждой гибкой упругой полосы 61А, 62А, соответственно 61В, 62В. Затухание этого основного упругого соединения больше, чем затухание каждой гибкой полосы. Эти характеристики гарантируют соединение между элементарными резонаторами 8101 и 8102, соответственно 8103 и 8104.
В этом варианте каждый первичный резонатор 10 сбалансирован отдельно и для поступательного перемещения, и для вращения.
Для каждого первичного резонатора 10A, 10В по меньшей мере основное упругое соединение 3А, соответственно 3В, поперечина 40А, соответственно 40В, гибкие упругие полосы 61А, 62А, соответственно 61В, 62В, образуют плоскую первичную цельную конструкцию, выполненную из материала, подвергаемого микрообработке, такого как кремний или оксид кремния, или кварц, или алмазоподобный углерод (DLC) или подобного, которая в исходном положении изохронного колебательного механизма 1 симметрична относительно плоскости симметрии. Преимущественно, неподвижная опора 2 образует цельный узел с этими двумя первичными цельными конструкциями. Выражение "плоская конструкция" означает, что эта цельная конструкция представляет собой прямую призму, созданную путем подъема двумерного контура вдоль направления вытягивания и ограниченную двумя торцевыми плоскостями, параллельными друг другу и перпендикулярными этому направлению вытягивания призмы.
Если в специфическом варианте осуществления цельная конструкция имеет постоянную толщину, ограниченную расстоянием между этими двумя торцевыми плоскостями, и, следовательно, имеет только один уровень, в некоторых вариантах некоторые области, в частности гибкие полосы цельной конструкции, могут занимать только часть толщины.
Один такой особенно предпочтительный вариант осуществления цельной конструкции применим к различным неограничивающим вариантам изобретения, описанным в настоящем описании. В первом варианте цельная конструкция получена способом выращивания типа MEMS или LIGA, или подобными.
В другом варианте цельная конструкция получена путем обрезания пластины, например, проволокой и/или путем электроэрозионного штампования.
На поперечине 40А, соответственно 40В, находится пара масс 5, обозначенных через 51А и 52А, соответственно 51В и 52В, установленных симметрично с каждой стороны неподвижной опоры 2 и основного упругого соединения 3А, соответственно 3В. Каждая из этих масс установлена с возможностью колебания и возвращается с помощью гибкой упругой полосы 61А, 62А, соответственно 61В, 62В, представляющей собой спиральную пружину или даже узел из спиральных пружины. Внутренние витки этих спиральных пружин непосредственно или косвенно соединены с массой, а внешние витки прикреплены к поперечине 40А, соответственно 40В. Каждая масса поворачивается вокруг мнимой оси вращения, имеющей определенное положение относительно поперечины 40А, соответственно 40В. В исходном положении изохронного колебательного механизма 1 каждая мнимая ось вращения совпадает с центром масс соответствующей массы. В исходном положении массы проходят по существу параллельно друг другу в поперечном направлении. Чтобы ограничить смещение центров масс при поперечном перемещении относительно поперечины 4, которая в поперечном направлении Y является настолько малой, насколько это возможно, и продольного перемещения в продольном направлении (перпендикулярном поперечному направлению), которое больше, чем упомянутое поперечное перемещение, каждая спиральная пружина имеет участок переменного сечения или кривизны вдоль длины развертки.
Вариант на фиг. 5 аналогичен варианту на фиг. 3, где каждый первичный резонатор 10А, 10 В, сочетая по два элементарных резонатора 8101, 8102, соответственно 8103, 8104, образует Н-образный изохронный камертонный колебательный механизм. Гибкие упругие полосы 6: 61А, 62А, соответственно 61В, 62В, образованы не спиральными пружинами, а короткими прямыми полосами. "Короткая полоса" - это полоса, длина которой меньше, чем наименьшее из значений четырехкратной ее высоты или тридцатикратной толщины, характеристика этой короткой полосы позволяет ограничить смещения соответствующего центра масс. Эти короткие полосы расположены здесь с каждой стороны поперечины 40А, соответственно 40В, с которой они образуют горизонтальную перекладину Н, а массы образуют вертикальные планки. В результате симметрии и выравнивания продольное расположение гибких упругих полос может компенсировать направление наибольшего смещения центра масс, который перемещается симметрично относительно плоскости симметрии.
Каждый первичный резонатор 10А, 10В, тем самым, ставший изохронным посредством одного из этих конкретных сочетаний элементарных резонаторов, предпочтительно включает в себя ограничители вращения и/или ограничители поступательного перемещения в продольном и поперечном направлениях, и/или ограничители перемещения в направлении, перпендикулярном двум предыдущим направлениям. Это средство ограничения перемещения может быть встроенным, может образовывать часть цельной конструкции, и/или может быть добавленным. Массы преимущественно включают в себя ограничивающее средство, устроенное так, чтобы взаимодействовать с комплементарным ограничивающим средством, содержащимся в поперечинах 40А, 40В, чтобы ограничивать смещение гибких упругих полос относительно поперечин в случае ударов или подобных ускорений.
На фиг. 5 также показан предпочтительный вариант, в котором передаточное средство 16А, 16В представляет собой гибкую упругую полосу. Тогда можно создать цельный узел, содержащий конструкцию 2, первичные резонаторы 10, описанные выше, в частности, цельные резонаторы и эти гибкие упругие полосы, и палец 150.
На фиг. 6 и 7 показаны варианты, в которых соединительные стержни представляют собой планки, содержащие шейки с обоих концов вместо ступиц. На фиг. 6 показан случай соединения двух первичных резонаторов, а на фиг. 7 - трех таких резонаторов. Передаточное средство 16, таким образом, включает в себя по меньшей мере один цельный соединительный стержень, устроенный так, чтобы взаимодействовать и со средством 15 управления, и с по меньшей мере двумя инерционными массами 5 соответствующего числа первичных резонаторов 10, и включает в себя по меньшей мере одну гибкую шейку в каждой области сочленения.
На фиг. 1, 2, 3 и 5 показан часовой осциллятор 1, содержащий два первичных резонатора 10.
В отдельном варианте осуществления часовой осциллятор 1 включает в себя по меньшей мере три первичных резонатора 10.
На фиг. 8 показан часовой осциллятор 1, содержащий три первичных резонатора 10. На этой фигуре показано применение соединения, приведенного на фиг. 7, к инерционным массам 5А, 5В, 5С трех первичных резонаторов 10А, 10В, 10С.
На фиг. 9 показан часовой осциллятор 1, содержащий четыре резонатора. Эти четыре резонатора могут представлять собой четыре первичных резонатора 10. Они также могут представлять собой четыре элементарных резонатора, образующих попарно два первичных резонатора: один образован элементарными резонаторами 10А и 10С, сдвинутыми по фазе на π, другой образован элементарными резонаторами 10В и 10D, также сдвинутыми по фазе на π.
Для вариантов осуществления, показанных на этих фиг. 8 и 9, каждый резонатор, взятый отдельно, реагирует на опору, и совмещение и тщательное сочетание n резонаторов компенсирует все реакции.
Короче говоря, изобретение охватывает все сочетания первичных резонаторов, которые:
- либо каждый сбалансирован по-отдельности, либо сбалансированы как одно целое посредством их определенного расположения,
- сбалансированы для поступательного перемещения и/или для вращения.
На фиг. 10, 12 и 13 показан вариант, в котором по меньшей мере одно упругое возвратное средство 6 также образует вращающийся направляющий элемент, который предотвращает трение, вызванное использованием осей вращения.
На фиг. 10 показано передаточное средство 16, образованное гибкой полосой, в конфигурации фиг. 9. На этой фигуре также показаны угловые ограничители 71, 72, 710, 720 массы 5, соответствующие комплементарные ограничительные поверхности 73, 74, 730, 740, 77 на раме 4, к которой прикреплена короткая гибкая полоса 6, и ограничительная поверхность 75 амортизатора массы 5, устроенная так, чтобы взаимодействовать с комплементарной поверхностью 750 на раме 4. Эти встроенные амортизаторы особенно предпочтительны и не требуют регулировки.
В показанных вариантах осуществления колесный узел 13 совершает вращательное движение; более конкретно, приводное средство 12 устроено так, чтобы приводить во вращательное движение колесный узел 13, а колесный узел 13 и приводное и направляющее средство 14 устроены так, чтобы оказывать на средство 15 управления по существу направленное по касательной усилие относительно вращения колесного узла 13.
На фиг. 11 показан вариант, в котором колесный узел 13 содержит деформируемую упругую конструкцию 130, образующую гибкий в радиальном направлении и жесткий в направлении по касательной направляющий элемент, причем эта деформируемая конструкция 130 содержит корпус 140 для взаимодействия с пальцем 150 средства 15 управления в главном сочленении.
В различных описанных в этом документе вариантах упругое возвратное средство 6 первичных резонаторов 10 предпочтительно включает в себя гибкие полосы, а первичные резонаторы 10 и/или общая конструкция 2 и/или рама 4 содержат радиальные и/или угловые и/или аксиальные ограничители, предназначенные для ограничения деформаций гибких полос, чтобы предотвратить разрыв в случае ударов или избыточного приводного крутящего момента.
В одном предпочтительном варианте осуществления, как видно, в частности, на фиг. 12 и 13, часовой осциллятор 1 содержит цельную конструкцию, которая сочетает общую конструкцию 4, к которой возвращаются инерционные массы 5 под действием упругого возвратного средства 6, средство 15 управления и его сочленения с передаточным средством 16, и передаточное средство 16 с его сочленениями с инерционными массами 5. Требуемые сдвиги по фазе гарантированы в полной мере, как и компенсация реакций.
Такие цельные конструкции позволяют обходиться без обычных осей вращения путем выполнения гибких полос, которые выполняют двойную функцию: поворотного направляющего элемента, образующего мнимую ось вращения, и упругий возврат.
Преимущественно, эта цельная конструкция также включает в себя ограничители.
Предпочтительно, ориентация упругого возвратного средства 6 первичных резонаторов 10 оптимизирована так, чтобы погрешности из-за гравитации первичных резонаторов компенсировались.
В непоказанном варианте упругое возвратное средство 6 первичных резонаторов 10 представляет собой мнимые оси вращения с пересекающимися полосами.
В отдельном варианте часового осциллятора 1 в соответствии с изобретением первичные резонаторы 10 являются изохронными.
Предпочтительно, по меньшей мере упругое средство, содержащееся в часовом осцилляторе 1 в соответствии с изобретением, является температурно-компенсированным. Вариант осуществления, выполненный из материала, подвергаемого микрообработке, может гарантировать такую компенсацию.
Изобретение также относится к часовому механизму 100, включающему в себя, по меньшей мере, один такой часовой осциллятор 1.
Изобретение также относится к часам 200, включающим в себя, по меньшей мере, один часовой механизм 100 такого типа.
Изобретение имеет множество преимуществ:
- колесо с прорезью, в отличие от упругого соединения с шатунной деталью, не добавляет нежелательного возвратного усилия на резонатор, когда меняется амплитуда, это повышает изохронность;
- использование вращающихся резонаторов, чей центр вращения по существу совпадает с центром масс, предотвращает перемещение центра масс в гравитационном поле и, тем самым, предотвращает нарушение периода вследствие изменения ориентации часов. То же объясняет, почему эта система меньше подвержена воздействию ударов при поступательном перемещении;
- предпочтительно все резонаторы идентичны и установлены параллельно. Движения одного не рискуют препятствовать инерции другого, в отличие от последовательного расположения;
- использование двух или более полностью отдельных резонаторов, т.е. с типичными для каждого первичного или элементарного резонатора инерционными массами, позволяет по-отдельности оптимизировать изохронность резонаторов и воздействовать на их работу, так что погрешности из-за положения и реакций на опору компенсируются. Это большое преимущество для получения осциллятора, который не зависит от положения часов, и который имеет очень высокий показатель качества.
- Конструкция позволяет очень просто производить интегрированную версию;
- изобретение допускает производство в строгих традициях производства часов, так как можно просто использовать два узла баланс-спираль, соединенных с анкерным колесом посредством очень легких соединительных стержней или гибких полос.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАТОР ДЛЯ МЕХАНИЧЕСКИХ ЧАСОВ | 2017 |
|
RU2749943C2 |
| Механические часы с изохронным и нечувствительным к положению поворотным резонатором | 2017 |
|
RU2743150C2 |
| ОПТИМИЗИРОВАННЫЙ ЧАСОВОЙ МЕХАНИЗМ | 2017 |
|
RU2743149C2 |
| МЕХАНИЗМ РЕЗОНАТОРА ЧАСОВ | 2017 |
|
RU2729625C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ КОЛЕСНОГО УЗЛА В ЧАСОВОМ МЕХАНИЗМЕ, ВКЛЮЧАЮЩЕМ МАГНИТНЫЙ СПУСКОВОЙ МЕХАНИЗМ | 2014 |
|
RU2670236C2 |
| Изохронный параксиальный часовой резонатор | 2015 |
|
RU2695518C2 |
| ЧАСЫ, СОДЕРЖАЩИЕ РАЗДЕЛЕНИЕ СРЕДСТВ ПЕРЕДАЧИ ЭНЕРГИИ И СЧЕТНЫХ СРЕДСТВ | 2014 |
|
RU2586056C1 |
| КАМЕРТОННЫЙ ГЕНЕРАТОР КОЛЕБАНИЙ ДЛЯ ЧАСОВ | 2015 |
|
RU2629167C2 |
| ЕСТЕСТВЕННЫЙ СПУСКОВОЙ МЕХАНИЗМ | 2014 |
|
RU2660530C2 |
| МЕХАНИЧЕСКИЙ ЧАСОВОЙ МЕХАНИЗМ С ПОВОРОТНЫМ РЕЗОНАТОРОМ, ЯВЛЯЮЩИЙСЯ ИЗОХРОННЫМ И НЕ ЧУВСТВИТЕЛЬНЫМ К РАСПОЛОЖЕНИЮ | 2018 |
|
RU2687510C1 |


Часовой осциллятор (1), содержащий конструкцию (2) и отдельные смещенные по времени и геометрически первичные резонаторы (10), каждый из которых содержит массу (5), возвращаемую к конструкции (2) с помощью упругого возвратного средства (6), причем часовой осциллятор (1) содержит соединительное средство (11) для взаимодействия с первичными резонаторами (10), содержащее колесный узел (13), на который воздействует крутящий момент или приводное усилие, при этом этот колесный узел (13) содержит приводное и направляющее средство (14), устроенное так, чтобы приводить в действие и направлять средство (15) управления, сочлененное с передаточным средством (16), каждое из которых на расстоянии от средства (15) управления сочленено с массой (5) первичного резонатора (10), при этом первичные резонаторы (10) и колесный узел (13) устроены так, что оси сочленений любых двух первичных резонаторов (10) и ось сочленения средства (15) управления никогда не лежат в одной плоскости. 3 н. и 20 з.п. ф-лы, 14 ил.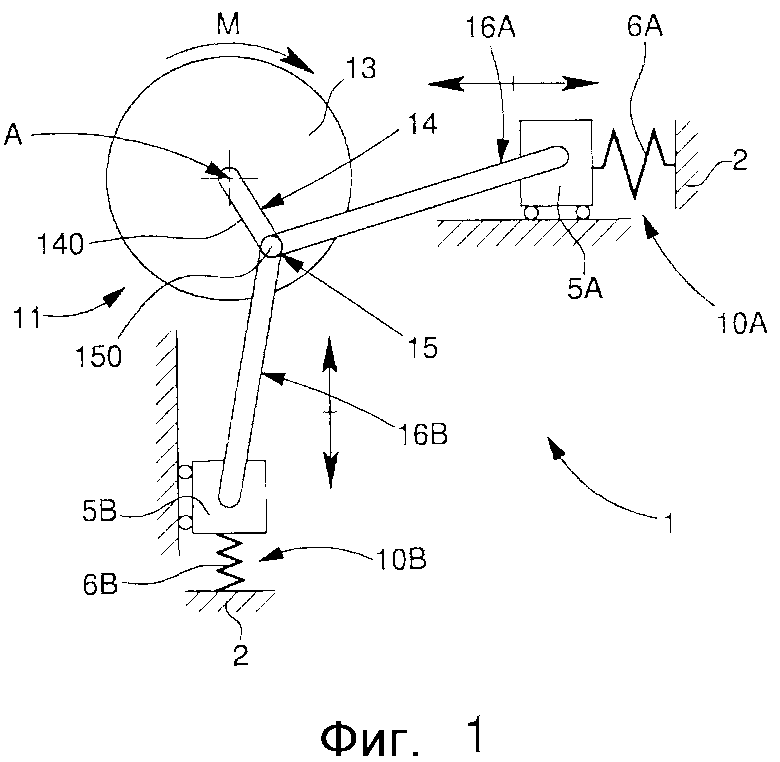
1. Часовой осциллятор (1), содержащий конструкцию (2) и/или раму (4) и несколько отдельных смещенных по времени и геометрически первичных резонаторов (10), каждый из которых содержит по меньшей мере одну инерционную массу (5), возвращаемую к упомянутой конструкции (2) или к упомянутой раме (4) с помощью упругого возвратного средства (6), отличающийся тем, что он включает в себя соединительное средство (11), обеспечивающее взаимодействие первичных резонаторов (10), причем упомянутое соединительное средство (11) включает в себя колесный узел (13), на который воздействует крутящий момент или приводное усилие, при этом колесный узел (13) включает в себя приводное и направляющее средство (14), выполненное с возможностью приведения в действие и направления средства (15) управления, которое сочленено с несколькими передаточными средствами (16), каждое из которых на расстоянии от упомянутого средства (15) управления сочленено с инерционной массой (5) первичного резонатора (10), при этом первичные резонаторы (10) и колесный узел (13) выполнены так, что оси сочленений любых двух первичных резонаторов (10) и ось сочленения средства (15) управления никогда не лежат в одной плоскости, причем первичные резонаторы (10) представляют собой вращающиеся резонаторы, при этом центры масс первичных резонаторов (10) во время нормальных колебаний первичных резонаторов (10) остаются в непосредственной близости от центров вращения упомянутых первичных резонаторов.
2. Часовой осциллятор (1) по п. 1, отличающийся тем, что результирующая сил реакции и крутящих моментов всех первичных резонаторов (10) относительно общей конструкции (2) или рамы (4) равна нулю.
3. Часовой осциллятор (1) по п. 1, отличающийся тем, что первичные резонаторы (10) имеют по меньшей мере одну по существу одинаковую резонансную моду и выполнены с возможностью колебаться с взаимным сдвигом по фазе на 2π/n, где n - это число первичных резонаторов (10).
4. Часовой осциллятор (1) по п. 1, отличающийся тем, что центры масс первичных резонаторов (10) остаются в фиксированном положении во время нормальных колебаний первичных резонаторов (10).
5. Часовой осциллятор (1) по п. 1, отличающийся тем, что передаточное средство (16) представляет собой гибкие упругие полосы.
6. Часовой осциллятор (1) по п. 1, отличающийся тем, что передаточное средство (16) включает в себя по меньшей мере один цельный соединительный стержень, выполненный с возможностью взаимодействия как со средством (15) управления, так и с по меньшей мере двумя инерционными массами (5) стольких же первичных резонаторов (10), и включает в себя по меньшей мере одну гибкую шейку в каждой области сочленения.
7. Часовой осциллятор (1) по п. 1, отличающийся тем, что передаточное средство (16) включает в себя соединительные стержни (160), каждый из которых включает в себя первое сочленение (161) со средством (15) управления и второе сочленение (162) с инерционной массой (5), причем первое сочленение (161) и второе сочленение (162) вместе задают направление соединительного стержня, при этом угол между любыми упомянутыми направлениями соединительных стержней, взятыми попарно, в любой момент времени отличен от нуля или π.
8. Часовой осциллятор (1) по п. 1, отличающийся тем, что колесный узел (13) выполнен с возможностью совершения вращательного движения, при этом колесный узел (13) и приводное и направляющее средство (14) выполнены с возможностью воздействия на средство (15) управления по существу направленным по касательной усилием относительно упомянутого вращения колесного узла (13).
9. Часовой осциллятор (1) по п. 1, отличающийся тем, что колесный узел (13) выполнен с возможностью совершения вращательного движения, при этом колесный узел (13) содержит упругую конструкцию (130), образующую гибкий в радиальном направлении и жесткий в направлении по касательной направляющий элемент.
10. Часовой осциллятор (1) по п. 1, отличающийся тем, что упругое возвратное средство (6) первичных резонаторов (10) предпочтительно включает в себя гибкие полосы, при этом первичные резонаторы (10), и/или общая конструкция (2), и/или рама (4) содержат радиальные, и/или угловые, и/или аксиальные ограничители, предназначенные для ограничения деформаций упомянутых гибких полос и для предотвращения разрыва в случае ударов или избыточного приводного крутящего момента.
11. Часовой осциллятор (1) по п. 1, отличающийся тем, что он содержит цельную конструкцию, которая сочетает общую конструкцию (4), к которой возвращаются инерционные массы (5) и их упругое возвратное средство (6), средство (15) управления и его сочленения с передаточным средством (16) и передаточное средство (16) и его сочленения с инерционными массами (5).
12. Часовой осциллятор (1) по п. 10, отличающийся тем, что он содержит цельную конструкцию, которая сочетает общую конструкцию (4), к которой возвращаются инерционные массы (5) и их упругое возвратное средство (6), средство (15) управления и его сочленения с передаточным средством (16) и передаточное средство (16) и его сочленения с инерционными массами (5), при этом цельная конструкция также включает в себя упомянутые ограничители.
13. Часовой осциллятор (1) по п. 11, отличающийся тем, что цельная конструкция представляет собой прямую призму, ограниченную двумя плоскостями, которые параллельны друг другу и перпендикулярны направлению вытягивания упомянутой призмы.
14. Часовой осциллятор (1) по п. 1, отличающийся тем, что упругое возвратное средство (6) первичных резонаторов (10) содержит короткие прямоугольные полосы, длина которых меньше, чем наименьшее из следующих значений: четырехкратная высота и тридцатикратная толщина упомянутых полос.
15. Часовой осциллятор (1) по п. 1, отличающийся тем, что первичные резонаторы (10) являются изохронными.
16. Часовой осциллятор (1) по п. 1, отличающийся тем, что приводное средство (12) выполнено с возможностью приведения колесного узла (13) во вращательное движение, при этом приводное и направляющее средство (14) образовано прорезью (140), в которой имеет возможность перемещения палец (150), содержащийся в средстве (15) управления.
17. Часовой осциллятор (1) по п. 16, отличающийся тем, что прорезь (140) проходит по существу радиально относительно оси (А) вращения колесного узла (13).
18. Часовой осциллятор (1) по п. 1, отличающийся тем, что первичные резонаторы (10) вместе образуют изохронный Н-образный камертонный колебательный механизм, причем каждый из них содержит гибкие упругие полосы, образованные короткими прямыми полосами, длина которых меньше, чем наименьшее из следующих значений: четырехкратная высота и тридцатикратная толщина упомянутых полос, расположенных с каждой стороны поперечины (40А; 40В), с которой полосы образуют горизонтальную перекладину для Н, при этом упомянутые массы (5) образуют вертикальные планки.
19. Часовой осциллятор (1) по п. 1, отличающийся тем, что первичные резонаторы (10) вместе образуют изохронный камертонный колебательный механизм в виде рогов козла, причем каждый из них содержит поперечину (40А; 40В), на которой находятся упомянутые массы (5), каждая из которых установлена с возможностью колебания и возврата с помощью гибкой упругой полосы, которая представляет собой спиральную пружину или узел из спиральных пружин, при этом каждая спиральная пружина непосредственно или опосредованно соединена с одной из упомянутых масс (5) своим внутренним витком и присоединена к упомянутой поперечине (40А; 40В) своим внешним витком, причем каждая спиральная пружина имеет переменное сечение или кривизну вдоль длины развертки.
20. Часовой осциллятор (1) по п. 1, отличающийся тем, что по меньшей мере одно упругое возвратное средство (6) также образует вращающийся направляющий элемент.
21. Часовой осциллятор (1) по п. 1, отличающийся тем, что по меньшей мере содержащееся в нем упругое средство является температурно-компенсированным.
22. Часовой механизм (100), включающий в себя по меньшей мере один часовой осциллятор (1) по п. 1.
23. Часы (200), включающие в себя по меньшей мере один механизм (100) по п. 22.
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЙ | 0 |
|
SU240505A1 |
| Спасательное устройство для канатных дорог | 1976 |
|
SU563314A1 |
| US 3318087 A, 09.05.1967 | |||
| Упругий элемент | 1979 |
|
SU911067A1 |
| US 3186157 A, 01.06.1965 | |||
| US 2010002548 A1, 07.01.2010. | |||

