Ссылки на родственные заявки
Настоящая заявка претендует на приоритет предварительной Патентной заявки US 61/980481 "Способы и устройство непрерывного мониторинга износа и давления в центробежных концентраторах", поданной 26 ноября 2014 г. Родственными для настоящей заявки также являются предварительная патентная заявка US 61/980481 "Способы и устройство непрерывного мониторинга износа в флотационных установках", поданная 16 апреля 2014 г., и международная заявка РСТ/ЕР2014/060342 "Способы и устройство непрерывного мониторинга износа в размольных установках", поданная 20 мая 2014 г. Все упомянутые заявки полностью включены в настоящее описание посредством ссылки во всех отношениях, как более полно показано ниже.
Область техники
Изобретение относится к оборудованию и способу повышения производительности, срока службы и/или коэффициента полезного действия установки центробежного (т.е., "гравитационного") концентратора/сепаратора и его компонентов. В частности, данное изобретение относится к способам мониторинга износа конусов, узлов конуса и конических компонентов внутри гравитационных концентраторов, а также к системам и устройствам для осуществления этого мониторинга. Кроме того, настоящее изобретение относится к способам мониторинга давления в водяной рубашке и/или распределения давления внутри гравитационного концентратора и системам и устройствам для осуществления этого мониторинга.
Уровень техники
В центрифугах, в частности, гравитационных концентраторах, преимущественно используемых в золотодобывающей промышленности (например, марки Knelson, Falcon или iCON, изготавливаемых компанией FLSmidth), могут использоваться конусы, отформованные из полиуретана или с полиуретановым покрытием. Эти конусы могут быть установлены внутри вращающегося корпуса ротора. Примеры выполнения таких центробежных сепарационных устройств можно найти в US 8808155; US 7500943; US 7503888; US 7144360; US 6997859; US 6149572; US 6986732; US 6962560; US 5601523; US 5601524; US 5586965; US 5338284; US 5368541; US 5728039; US 5222933; US 5372571; US 5230797; US 5372571; US 5354256; US 5087127; US 4983156; US 4846781; US 4776833; US 4608040; патент Канады 2625841; патент Канады 2625843; патент Канады 1301725; патент Канады 1111809; патент Канады 1279623; патент Канады 1240653; патент Великобритании 8505178; патент Великобритании 8828539; публикация WIPO WO 07143817; публикация WIPO WO 05011872; публикация WIPO WO 97000728; и патент Австралии AU 198280202, без ограничений.
Конус вместе с кожухом корпуса ротора могут формировать узел, в составе которого они вращаются вокруг проходящей вертикально оси. Узел может вращаться с большой скоростью, для создания условий с высокой гравитацией для отделения тяжелых целевых металлов (например, золота) от пустой породы или менее важных минеральных соединений. В процессе вращения, в концентратор может нагнетаться пульпа, направляемая по центру вниз, в основание конуса. Этот поступающая пульпа затем отбрасывается по радиусу наружу и движется вверх и радиально наружу, ступенчато переходя по последовательности пазов и гребней, сформированных на обращенных внутрь поверхностях конуса. Более тяжелые целевые металлы (например, золото) могут оседать в канавках на конусе и тем самым, могут быть захвачены, при этом более легкие частицы пустой породы могут всплывать над пазами и гребнями и, в конечном итоге, оказываются отброшенными радиально наружу и вверх над переливным желобом внутри гравитационного концентратора. Для обеспечения непрерывности процесса, в дне пазов/канавок может создаваться кипящий слой с тем, чтобы исключить (или свести к минимуму) оседание пустой породы внутри пазов/канавок конуса. Псевдоожижение также позволяет обеспечить перемещение пустой породы вверх и над переливным желобом, в результате чего только тяжелые целевые металлы (например, золото) остаются захваченными внутри конуса. Формирование кипящего слоя может быть выполнено созданием высокого давления в водяной рубашке, образованной между конусом и кожухом корпуса ротора, и размещением множества отверстий для создания кипящего слоя, проходящих в радиальном направлении через пазы/канавки конуса. Отверстия для создания кипящего слоя могут быть расположены под углом, имеющим радиально направленную составляющую и, опционально, тангенциальную составляющую. Другими словами, отверстия для создания кипящего слоя могут и не быть ориентированы точно по радиусу относительно оси вращения узла.
Конусы гравитационных концентраторов часто заменяют вследствие их износа. Однако при проведении работ по обогащению золотосодержащего сырья обычно нежелательны длительные перерывы для слишком частых проверок состояния поверхности конусов. При проведении работ по обогащению золотосодержащего сырья обычно нельзя делать чересчур длительные остановки для замены изношенных конусов, поскольку это может повлиять на функционирование системы и отрицательно сказаться на извлечении золота. Например, могут быть потеряны целевые металлы (например, золото), если произошло истирание выступающих радиально внутрь гребней конуса и нарушилось их нормальное функционирование. Соответственно, в отрасли давно ощущается потребность оперативного определения физического состояния конуса гравитационного концентратора непосредственно в процессе работы с тем, чтобы можно было легко прогнозировать рабочий остаточный срок службы и/или более эффективно планировать периоды простоя установки.
Продолжительные ремонтные работы, при их частом повторении, могут привести к потерям, например, связанным с преждевременной заменой конуса (т.е. увеличенные эксплуатационные издержки/капитальные затраты), слишком длительным простоем, увеличенными затратами рабочей силы и сниженной производительностью. Если же, напротив, ремонтные работы выполняются слишком редко, могут возникать серьезные потери другого рода, например, механические поломки, потери дорогостоящих драгметаллов, снижение эффективности концентрации/сепарации и/или плохое отделение материала.
Поскольку износ поверхности конуса обычно не заметен визуально в процессе работы гравитационного концентратора (из-за слоя пульпы, переливающейся поверх его внутренних поверхностей), оператор установки может быть вынужден останавливать гравитационный концентратор, выпускать оставшуюся пульпу из концентратора, обтирать конус и, получив доступ к внутренней части концентратора, провести более тщательную инспекцию. Это требует значительных затрат времени и сокращает производительность установки. В предложенных частных вариантах выполнения систем и способов может обеспечиваться непрерывный прямой мониторинг состояния износа конусов гравитационного концентратора в процессе работы, поэтому текущая степень износа может быть известна без необходимости остановки работы гравитационного концентратора для обеспечения возможности визуального осмотра. Более того, в соответствии с частными вариантами выполнения системы и способов, раскрытыми в настоящем изобретении, может быть задано распределение давления в водяной рубашке для оптимизации рабочих характеристик сепаратора. Рабочие характеристики могут включать, помимо прочих, скорость вращения, временные параметры цикла (например, для периодических или повторно-кратковременных циклов загрузки), продолжительность пребывания, подводимая мощность/энергия, давление в отверстиях для создания кипящего слоя, давление в водяной рубашке, расход подачи пульпы и т.д.
В области обогащения минералов предлагались различные системы контроля износа. Примером распространенной системы контроля износа может служить разработанная компанией FLSmidth система Krebs SmartCyclone™. Другим примером системы управления износом может служить система, описанная в находящейся в одновременном рассмотрении предварительной патентной заявке 61/980481 "Способы и устройство непрерывного мониторинга износа в флотационных установках". Еще один пример системы управления износом в технологии обогащения минералов приведен в находящейся в одновременном рассмотрении международной заявке РСТ/ЕР2014/060342 "Способы и устройство непрерывного мониторинга износа в размольных установках". Другие примеры обычных систем управления износом могут быть найдены, помимо прочего, в следующих патентах и патентных заявках: US 4646001; US 4655077; US 5266198; US 6080982; US 6686752; US 6945098; и публикации патентной заявки US 2003/0209052.
Задачи изобретения
Соответственно, задачей некоторых вариантов выполнения настоящего изобретения является создание способа уведомления оператора об изменении диаметра облицовки гравитационного концентратора на определенную величину, например для индикации одного или более пороговых значений износа.
Другой задачей некоторых вариантов выполнения настоящего изобретения является создание способа предоставления оператору информации о распределении давления, относящейся к функциональному взаимодействию водяной рубашки с конусом гравитационного концентратора, например, для повышения эффективности концентратора.
Также задачей некоторых вариантов выполнения настоящего изобретения является обеспечение возможности эффективной превентивной диспетчеризации профилактических работ на основе количественных данных, полученных от остающихся в эксплуатации гравитационного концентратора, центробежного сепаратора или системы обогащения металлов.
Другая задача некоторых вариантов выполнения настоящего изобретения может включать предоставление оператору возможности диспетчеризации профилактических работ на гравитационном концентраторе на основе реальных данных измерения износа, для оптимизации производительности концентратора, скорости вращения, энергопотребления, долговечности конуса и/или численности персонала.
Также задачей некоторых вариантов выполнения настоящего изобретения является повышение эффективности существующих концентрационных установок посредством увеличения или доведения до максимальной продолжительности срока службы установки с коническим гравитационным концентратором и его компонентов, например, не влекущих за собой убыточных потерь ценного металла, обусловленных чрезмерным износом.
Другой задачей некоторых вариантов настоящего изобретения является создание системы и устройства, выполненного с возможностью индикации в реальном масштабе времени необходимости замены конуса, без необходимости периодического или повторяющегося временного вывода из эксплуатации, очистки и/или визуальной инспекции оператором.
Кроме того, задача изобретения, согласно некоторым вариантом его выполнения, может включать выработку рентабельного и экономичного пути финансирования владельцами предприятия текущей деятельности этого предприятия, компенсации эксплуатационных расходов, снижения затрат на профилактические работы, обоснования больших первоначальных капиталовложений и снижения накладных расходов.
Другой задачей некоторых вариантов выполнения настоящего изобретения является предоставление оператору гравитационного концентратора в реальном масштабе времени информации о распределении давления в водяной рубашке, относящейся к конусу гравитационного концентратора, и, в некоторых случаях, о распределении давления в водяной рубашке даже в процессе работы.
Еще одной задачей некоторых вариантов выполнения настоящего изобретения является создание системы и устройства, позволяющих оператору получать в реальном масштабе времени информацию о возможности полного или частичного закупоривания в процессе работы отверстий в конусе концентратора для создания кипящего слоя.
Еще одной задачей некоторых вариантов настоящего изобретения является создание системы и устройства, позволяющих оператору осуществлять в реальном масштабе времени различные небольшие регулировки и коррекции, например, небольшие регулировки потока воды к конусу, для оптимизации заполнения водяной рубашки гравитационного концентратора.
Другая задача, в соответствии с некоторыми вариантами выполнения настоящего изобретения, может включать создание системы и устройства, позволяющих оператору установить соответствие требуемого перепада давления содержанию в руде извлекаемого металла или его типа, или отделенной пустой породе (используя данные о постепенном заполнении/набивании колец концентратора тяжелыми целевыми материалами и/или пустой породой).
Еще одной задачей, в соответствии с некоторыми вариантами выполнения настоящего изобретения, может быть создание системы и устройства для оптимизации работы установки путем использования зависимости от давления, для регулирования периодичности цикла загрузки или для регулирования цикла непрерывной работы, вместо управления рабочими циклами только по истекшему времени, что обычно имеет место в существующих установках.
Еще другой задачей, в соответствии с некоторыми вариантами выполнения настоящего изобретения, может быть предоставление оператору возможности мониторинга величины износа отдельных или конкретных уретановых колец (т.е., пазов и/или гребней) конуса гравитационного концентратора.
Другой задачей, в соответствии с некоторыми вариантами выполнения настоящего изобретения, может быть обеспечение мониторинга распределения давления во вращающейся водяной рубашке, расположенной снаружи конуса гравитационного концентратора и внутри кожуха корпуса ротора, при этом раскрытые здесь различные устройства, системы и способы могут более конкретно обеспечить мониторинг давлений с обратной стороны уретановых колец концентратора. Благодаря этому, для оптимизации псевдоожижения и/или для предотвращения или ослабления закупоривания отверстий для создания кипящего слоя, оператором или системой управления может осуществляться регулирование скорости вращения, мощности или давления текучей среды.
Эти и другие задачи настоящего изобретения будут понятны при ознакомлении с приведенными чертежами и описанием. Хотя считается, что каждая задача изобретения решается по меньшей мере в одном варианте выполнения изобретения, любой вариант выполнения изобретения не обязательно решает все задачи настоящего изобретения.
Раскрытие изобретения
В настоящем изобретении предложены различные системы и способы для определения величины износа конуса внутри гравитационного концентратора во время его работы, в частности, для обнаружения достижения недопустимого порогового износа мягкого облицовочного материала конуса, формирующего несколько гребней и пазов (т.е., "колец концентратора"). Также предложены способы индикации оператору или системе управления остаточного срока службы этого конуса, для выполнения регулировки, оптимизации или определения приоритетов в программах обслуживания гравитационного концентратора и/или сокращения времени простоя оборудования. Также предложены способы мониторинга, измерения, индикации и использования информации, относящейся к распределению давления в водяной рубашке, связанной с упомянутым конусом. Соответственно, длительность рабочих циклов и время нахождения пульпы могут быть отрегулированы и/или оптимизированы в статических условиях и/или в динамике с использованием данных о распределении давления, в противоположность установлению заранее заданного времени непрерывной работы, что обычно имеет место в существующем оборудовании.
Приводится раскрытие системы непрерывного мониторинга износа и/или давления внутри гравитационного концентратора. Система содержит гравитационный концентратор, включающий узел конуса, состоящий из конуса, кожуха корпуса ротора и водяной рубашки между конусом и кожухом корпуса ротора. По меньшей мере на конусе или кожухе корпуса ротора имеется по меньшей мере один детектор. На гравитационном концентраторе может быть установлен по меньшей мере один сенсор, выполненный с возможностью взаимодействия с по меньшей мере одним детектором в процессе работы гравитационного концентратора. По меньшей мере одним детектором может быть метка радиочастотной идентификации (RFID метка), беспроводной датчик давления, работающий на частоте RFID (от англ. Radio Frequency Identification) метки, при ее наличии, или другой частоте, или их комбинация. В процессе работы, части конуса из мягкого материала (включая кольца концентратора) могут изнашиваться, обнажая, в конечном итоге, по меньшей мере один детектор для воздействия пульпы. В результате, под воздействием может оказаться функционирование по меньшей мере одного детектора. По меньшей мере один детектор может прекратить работать (например, не сможет передавать сигнал или напряжение после воздействия абразивной жидкости в пульпе, при использовании детектора в качестве расходуемого элемента), либо может изменить напряжение (например, когда части по меньшей мере одного детектора открыты для воздействия абразивной жидкости в пульпе), что может быть обнаружено сенсором.
Кроме того, давление внутри водяной рубашки может меняться во времени, что, наконец, может повлиять на функционирование по меньшей мере одного детектора. Например, при локальном изменении давления внутри водяной рубашки изменение или изменения силы сигнала, или изменение или изменения в сигнале, излучаемом по меньшей мере одним детектором, могут быть восприняты сенсором. Благодаря наличию связи с по меньшей мере одним детектором, по меньшей мере один сенсор может быть выполнен с возможностью мониторинга функции или состояния по меньшей мере одного детектора, и может также определить, находится ли рабочее состояние конуса в допустимых пределах, выше заданного (например, "минимального") порога, и/или ниже заданного (например, "максимального") порога. В качестве альтернативы, или в дополнение к определению рабочего состояния конуса, посредством мониторинга функции или состояния по меньшей мере одного детектора может быть определена в реальном масштабе времени зависимость давления в одной или более областях водяной рубашки. Это может быть достигнуто путем использования нескольких детекторов, расположенных в специально выбранных местах внутри некоторых локализованных участков водяной рубашки, как это показано на фиг. 8 и 9. В некоторых вариантах выполнения, по меньшей мере один детектор может содержать RFID метку, беспроводной датчик давления или их комбинацию. В некоторых вариантах выполнения, по меньшей мере один сенсор может содержать считывающее/опросное устройство (ридер). В некоторых вариантах выполнения, каждый детектор может иметь свой собственный уникальный идентификатор, например, свою собственную уникальную частоту, сигнал или напряжение.
В некоторых вариантах выполнения, RFID метка может представлять собой низкочастотную RFID метку, и по меньшей мере один сенсор может содержать низкочастотный детектор/идентификатор, работающий в килогерцовом диапазоне частот. В некоторых вариантах выполнения, по меньшей мере один детектор может содержать ультравысокочастотную RFID метку, и по меньшей мере один сенсор может содержать ультравысокочастотный детектор/идентификатор, работающий мегагерцовом диапазоне частот. В некоторых вариантах выполнения, RFID метка может представлять собой СВЧ RFID метку, и по меньшей мере один датчик может содержать СВЧ детектор/идентификатор, работающий в гигагерцовом диапазоне частот. В других вариантах выполнения, по меньшей мере один детектор может содержать магнит, а по меньшей мере один сенсор может представлять собой датчик на эффекте Холла. В других вариантах выполнения, по меньшей мере один детектор может содержать вафлевидный пробник с печатной платой. В некоторых случаях, по меньшей мере один детектор может содержать радионуклид, способный испускать альфа-частицы и/или мягкое гамма-излучение, а по меньшей мере один сенсор может содержать детектор/идентификатор радионуклида, причем этот по меньшей мере один сенсор может быть выполнен с возможностью обнаружения радионуклида, когда по меньшей мере один детектор становится полностью или частично незащищенным в результате заданной степени износа конуса (например, разрушения полиуретановой оболочки по меньшей мере одного детектора). В соответствии с некоторыми вариантами выполнения, по меньшей мере один детектор может содержать радиочастотный беспроводной микропередатчик с автономным питанием, а по меньшей мере один сенсор может иметь приемник, настроенный на частоту этого радиочастотного беспроводного микропередатчика.
В некоторых вариантах выполнения, для определения заданной степени износа конуса концентратора может быть использована замкнутая цепь низкого напряжения. Для этого, перед формованием конуса, на его каркасе по окружности располагается петля провода, присоединенного к детектору, имеющему встроенную схему и источник питания. Проволочная петля может располагаться, например, вдоль ребра каркаса. Проволочная петля (и, опционально, беспроводной детектор) могут быть встроены в конус с использованием той же технологии многослойного формования, что используется для изготовления конуса в целом. Проволочная петля может быть расположена в определенных местах на одинаковом расстоянии от внутренних поверхностей конуса, или в виде маленькой петли на конусе в точках с одним или более радиальными расстояниями. В процессе использования/работы, если износ конуса (в результате абразивного воздействия пульпы) распространяется за пределы заданной точки, проволочная петля окажется под абразивным воздействием пульпы и может быть стерта до разрушения, с разрывом замкнутой цепи и оповещением оператора или системы управления, что требуется замена конуса, обслуживание или восстановление, вследствие чрезмерного износа. В некоторых предпочтительных вариантах выполнения, проволочная петля может быть тонкой или иметь очень малый диаметр для облегчения разрыва под воздействием абразивной пульпы. В некоторых предпочтительных вариантах выполнения, по окружности конуса в нескольких частях конуса могут быть размещены несколько встроенных петель провода, для обнаружения износа конуса вдоль областей с разным расположением по вертикали вдоль его оси вращения. В некоторых предпочтительных вариантах выполнения, несколько проволочных петель могут использовать общий детектор и быть соединены параллельно. В некоторых предпочтительных вариантах выполнения, несколько проволочных петель могут использовать общий детектор и соединяться последовательно (например, несколько проволочных петель могут образовывать единую спиральную катушку провода, перекрывающую большую часть поверхности конуса). В некоторых предпочтительных вариантах выполнения, активизация схемы может выполняться периодически, с заданными интервалами, вместо непрерывного включения, для уменьшения утечки, особенно в вариантах выполнения со встроенной батареей для детектора(-ов). Например, один или более детекторов могут быть выполнены с возможностью периодического включения, что позволяет получать отсчеты в течение 1 -2 лет или более.
В некоторых вариантах выполнения, детектором может быть беспроводной сенсор или датчик жидкости, выполненный с возможностью определения наличия жидкости между двумя выводами. В таких вариантах выполнения, выводы могут быть соединены, образуя проволочную петлю. Когда петля разрывается в результате эрозионного износа полимера конуса, (например, полиуретана), между двумя выводами может быть обнаружено присутствие воды, и беспроводной сенсор или датчик воды может, в результате, сигнализировать оператору гравитационного концентратора/центробежного сепаратора, и/или сигнализировать системе управления установки, и извещать о возможности чрезмерного износа конуса, который может негативно сказаться на эффективности установки и/или извлечении золота.
В некоторых вариантах выполнения, выводы, отходящие от беспроводного индикатора или датчика воды, могут быть прикреплены к каркасу конуса, а затем заделаны вовнутрь полимера конуса (например, полиуретана), так, что между выводами будет небольшой зазор. При этом в случае значительного износа полиуретана вблизи концов выводов, между концами выводов собирается вода из пульпы, которая может быть здесь обнаружена. Когда вода обнаружена между двумя выводами, беспроводной индикатор или датчик воды может, в результате, сигнализировать оператору гравитационного концентратора/центробежного сепаратора, и/или сигнализировать системе управления установки, и извещать о возможности чрезмерного износа конуса, который может негативно сказаться на эффективности установки и/или извлечении золота. Одним частным примером такого беспроводного индикатора или датчика воды является беспроводной индикатор воды Monnit™ 900 MHz Commercial (PN: MNS-9-WS-W1-LD) с 3-Вольтовой часовой батарейкой, компании Monnit Corp.
В некоторых вариантах выполнения, по меньшей мере один детектор может быть связан с сенсором по беспроводному каналу. В других вариантах выполнения, по меньшей мере один детектор может иметь проводное соединение с по меньшей мере одним сенсором для обеспечения связи. В системе с несколькими гравитационными концентраторами (например, на обогатительном предприятии), в одном или более местах конуса, кожуха корпуса ротора и/или водяной рубашки, может использоваться большое число детекторов в разных комбинациях или вариантах размещения без каких либо ограничений, и, в некоторых случаях, по меньшей мере один детектор может использоваться для одной или более частей каждого гравитационного концентратора этой системы (например, в установке по обогащению золотосодержащего сырья). Более того, по меньшей мере один детектор может относиться к одной или более частям одного гравитационного концентратора. Например, первый детектор может быть установлен на первой части конуса или кожухе корпуса ротора, в первой радиальной позиции, отличающейся от радиальной позиции второго детектора, установленного на этом конусе или кожухе корпуса ротора. Второй детектор может быть установлен на части конуса или кожухе корпуса ротора во второй вертикальной позиции, отличающейся от первой вертикальной позиции первого детектора. Можно представить себе различные комбинации радиально-смещенных и вертикально-смещенных детекторов на конусе гравитационного концентратора. Имея несколько детекторов, размещенных вдоль одного радиального направления в определенной вертикальной позиции на конусе, можно прослеживать во времени различную степень износа в радиальном направлении в определенном месте (т.е., нарастание износа в радиальном направлении).
Также приводится раскрытие конуса для использования в гравитационном концентраторе. Конус может содержать элемент крепления к кожуху корпуса ротора и по меньшей мере один детектор, который может быть выполнен с возможностью поддержания связи с сенсором на гравитационном концентраторе. В процессе использования, части по меньшей мере одного конуса могут изнашиваться, что, в конечном итоге, повлияет на функционирование по меньшей мере одного детектора. Благодаря связи с упомянутым сенсором, в некоторых вариантах выполнения, по меньшей мере один детектор может способствовать определению рабочего состояния конуса и/или определению того, находится ли это состояние в приемлемых границах. Благодаря связи с по меньшей мере одним детектором, по меньшей мере один сенсор может быть, в некоторых вариантах выполнения, выполнен с возможностью мониторинга функционирования по меньшей мере одного детектора и/или определения, в реальном масштабе времени, распределения давления по одной или более областям водяной рубашки.
В некоторых вариантах выполнения, по меньшей мере один детектор может содержать метку радиочастотной идентификации (RFID метку). В некоторых вариантах выполнения, по меньшей мере один детектор может содержать магнит. В некоторых вариантах выполнения, по меньшей мере один детектор может содержать вафлевидный пробник, имеющий печатную плату. В некоторых вариантах выполнения, по меньшей мере один детектор может содержать радионуклид, способный испускать альфа-частицы и/или мягкое гамма-излучение. На конусе может устанавливаться большое количество детекторов, размещенных любым возможным образом или в любой комбинации, без каких-либо ограничений. Например, в некоторых вариантах выполнения, несколько детекторов могут быть установлены в частях конуса с различным радиальным, вертикальным или угловым положениями (например, на каркасе конуса, перед формованием). В некоторых вариантах выполнения, детектор может устанавливаться на конусе в виде отдельного компонента в полости, которая может быть получена в ходе формования или после формования конуса. Для удерживания детектора внутри такой полости может использоваться резьбовая вставка, заглушка, крышка и/или конусная заглушка. В других вариантах выполнения, детекторы могут быть залиты в полость, приготовленную в конусе, или, более предпочтительно, прикреплены к частям каркаса в заданных местах и позициях относительно каркаса конуса, перед формованием (например, перед многослойным литьевым формованием на каркас полимера, например уретана для формирования конуса).
Краткое описание чертежей
В качестве дополнения к приводимому описанию и для лучшего понимания признаков изобретения, к настоящему описанию как неотъемлемая его часть приложен комплект чертежей, на которых с целью иллюстрации, не ограничивающей изобретение:
на фиг. 1 схематически представлен вид поперечного сечения гравитационного концентратора, в котором используются некоторые частные особенности изобретения, в соответствии с некоторыми вариантами выполнения;
на фиг. 2 схематически показан внутренний каркас конуса, в котором использованы некоторые частные особенности изобретения, в соответствии с некоторыми вариантами выполнения;
на фиг. 3 схематически показан отформованный конус (т.е., многослойное литье по внутреннему каркасу), в котором использованы некоторые частные особенности изобретения, в соответствии с некоторыми вариантами выполнения;
на фиг. 4 схематически представлен вид сечения конуса, показанного на фиг. 3, иллюстрирующий некоторые частные особенности изобретения, в соответствии с некоторыми вариантами выполнения;
на фиг. 5 представлена фотография наружной части литой облицовки конуса концентратора, схематически изображающая направление отверстий для создания кипящего слоя и направление вращения литой облицовки конуса, а также возможные места установки/встраивания одного или более детекторов, в соответствии с некоторыми вариантами выполнения;
на фиг. 6 представлен перспективный вид сечения литой облицовки конуса, показанной на фиг. 3-5, также изображающий внутреннюю часть облицовки с рядом сквозных отверстий для создания кипящего слоя, которые проходят от внешней поверхности конуса (т.е., прилегающей к водяной рубашке) к внутренней части конуса, в области паза/канавки;
на фиг. 7 и 8 приведены схематические представления узла конуса, в соответствии с некоторыми вариантами выполнения, которые также показывают, каким образом могут быть измерены различные давления, в соответствии с некоторыми вариантами выполнения. В частности, на чертежах показано, как могут быть измерены давления в различных местах водяной рубашки (а также давления в основании области паза/канавки);
на фиг. 9 представлено полное поперечное сечение узла конуса, в соответствии с некоторыми вариантами выполнения, в котором конус вложен внутрь кожуха корпуса ротора, с образованием между ними водяной рубашки, причем внутри может быть помещено или прикреплено к участкам, образующим водяную рубашку на внутренней части кожуха корпуса ротора, некоторое число датчиков давления; внутри водяной рубашки на внешней части конуса может быть помещено некоторое число датчиков давления, либо они могут быть встроены внутри внешней части конуса так, чтобы быть открытыми со стороны частей водяной рубашки; и рядом с одной или более радиально внутренних частей конической облицовки кожуха корпуса ротора, например, внутри частей пазов/канавок облицовки конуса или прилегая к ней, могут быть установлено некоторое число датчиков давления;
на фиг. 10 приведен пример схемы, в которой могут быть, опционально, объединены данные давления и износа с разных детекторов, в соответствии с некоторыми вариантами выполнения.
Далее приводится более подробное описание со ссылками на чертежи в связи с частными вариантами выполнения.
Ссылочные цифровые обозначения
10 гравитационный концентратор/центробежный сепаратор
12 вход подводящей трубы
14 отверстие отвода концентрата
20 кожух корпуса ротора
30 конус
31 отверстия для создания кипящего слоя
32 узел конуса
33 паз/канавка/впадина/борозда
34 детекторы
35 гребень/ребро/венец/вершина
36 элемент конструкции каркаса
37 верхний фланец
38 каркас
39 внешняя поверхность конуса
40 водяная рубашка
50 переливной желоб
60 сенсор
70 двигатель
Р1 первое давление
Р2 второе давление
Р3 третье давление
Р4 четвертое давление
Р5 пятое давление
А первые датчик давления и передающее устройство
В вторые датчик давления и передающее устройство
С третьи датчик давления и передающее устройство
D четвертые датчик давления и передающее устройство
Е пятые датчик давления и передающее устройство
F шестые датчик давления и передающее устройство
Подробное описание осуществления изобретения.
Приведенное ниже описание частных вариантов выполнения, показанных на чертежах, используется в качестве примера и не предназначено для ограничения описываемых здесь изобретений, их применений и использований.
Мониторинг износа конуса гравитационного концентратора можно выполнять, используя способ, описанный в находящейся в совместном рассмотрении международной заявке РСТ/ЕР2014/060342, поданной заявителем настоящей заявки и полностью включенной посредством ссылки во всех отношениях, как будет более полно показано ниже. Предпочтительно, могут быть использованы детекторы (например, RFID метки на 433 МГц) в сочетании с компонентами гравитационного концентратора и сенсорным устройством. Детекторы могут быть, в некоторых вариантах выполнения, предварительно размещены и установлены на опорной конструкции (например, каркасе 38), как это показано на фиг. 2. Для точной установки детекторов на выбранном радиальном расстоянии от центра вращения каркаса, или в конкретном месте по вертикали или по окружности, могут быть использованы держатели или крепежные приспособления. В некоторых вариантах выполнения, несколько детекторов может быть помещено на различных радиальных расстояниях от оси вращения каркаса конуса. В некоторых вариантах выполнения, детекторы могут быть расставлены с промежутками по вертикали, например, в направлении, параллельном оси вращения каркаса конуса. Детекторы могут быть распределены равномерно или неравномерно по окружности каркаса конуса, без каких-либо ограничений, но предпочтительно так, чтобы не нарушалась балансировка готового конуса. К детекторам могут предварительно прикрепляться адаптеры, например, хомуты с предварительно выбранными размерами, имеющие ограничитель заданной глубины установки, с помощью которых детекторы могут быть прикреплены к части (например, к "реберной" части) каркаса конуса, и вдавливаться в радиальном направлении внутрь или в радиальном направлении наружу, пока ограничитель заданной глубины адаптера не покажется над этой частью каркаса, как это описано в упомянутой выше заявке РСТ/ЕР2014/060342, введенной в настоящее описание. Благодаря этому адаптеры могут надежно обеспечить требуемую установку детекторов внутри конуса после формования или заливки конуса (т.е., после того, как каркас помещен в камеру, заполненную полиуретаном). Для временной фиксации детекторов к каркасу перед формованием/литьем и/или во время этого процесса могут использоваться метки на каркасе и/или адгезивы или фиксирующие ленты.
В некоторых случаях, в дополнение, или вместо мониторинга износа, посредством одного или более детекторов, содержащих датчики давления, может выполняться периодическое или непрерывное измерение давления в реальном масштабе времени. Например, в некоторых вариантах выполнения, могут быть использованы одна или более активные RFID метки с рабочей частотой 433 МГц (с батарейным питанием) для передачи данных давления от малогабаритного датчика давления к сенсору, расположенному над конусом рядом с ним. При этом сенсоры могут быть в состоянии определить наличие сильного закупоривания одного или более отверстий для создания кипящего слоя, имеющихся в конусе. Если давление превосходит заданное пороговое значение, это может свидетельствовать о закупоривании отверстия для создания кипящего слоя или наличия большого количества тяжелого целевого материала (например, "золота"), заполняющего пазы колец концентратора (см. фиг. 7 и 8) и, тем самым, указывать на завершение рабочего цикла. Например, если давление, измеряемое конкретным детектором, превышает заданное пороговое значение давления или опускается ниже него, и это отражается информацией от сенсора, принимаемой контроллером центрального процессора (ЦП) гравитационного концентратора, контроллер ЦП может остановить, замедлить или завершить рабочий цикл гравитационного концентратора.
На фиг. 1 представлен в поперечном сечении гравитационный концентратор 10, использующий один или более детекторов 34, и по меньшей мере один сенсор 60. Несколько детекторов 34, которые могут представлять собой RFID метки, могут быть залиты или вставлены внутри одной или более частей конуса 30. В некоторых предпочтительных вариантах выполнения, конус 30 может быть выполнен из полиуретана, который может выбираться от умеренно мягкого до твердого. Вблизи гравитационного концентратора 10 могут располагаться один или более сенсоров 60, например, в точке вблизи конуса 30, предпочтительно, на прямой видимости с одним или более детекторами 34. По меньшей мере один сенсор 60 может, в частности, представлять собой монтируемое на установке или ручное считывающее устройство, имеющее RFID антенну. Антенна может быть залита, например, в защитную уретановую оболочку и помещена, в частности, в панель каркаса гравитационного концентратора, кожух, или внешний защитный кожух. Это расположение может зависеть от конструкции, но предполагается, что в предпочтительных вариантах антенна может помещаться на верхней панели гравитационного концентратора 10, или вокруг нее, как показано на чертеже. С сенсором 60 могут быть связаны контроллер, (например, программируемый логический контроллер ПЛК), печатная схема, либо ЦП, для обеспечения различных функций гравитационного концентратора 10 (например, включение/выключение, быстрее/медленнее, следующий цикл, остановка цикла и пр.), выполняемых в автоматическом режиме, в зависимости от поступающих данных. Трасса между одним или более детекторами и сенсором 60, предпочтительно, свободна от каких-либо крупных компонентов, которые могли бы ухудшить, значительно ослабить или предотвратить распространение сигнала между сенсором и одним или более детекторами. Диаметр основания конуса, в некоторых вариантах выполнения, может составлять примерно 1-5 футов, например, в частности, может быть примерно 34 дюйма. Верхний, больший, диаметр верхней части конуса, в некоторых вариантах, может составлять примерно 2-6 футов, например, в частности, примерно 48 дюймов. В некоторых предпочтительных вариантах выполнения, скорость вращения конуса в процессе работы может варьироваться, в частности, примерно от 0 до 460 об/мин.
Пульпа поступает в верхнее центральное загрузочное отверстие 12 (т.е., "точка подачи") и распределяется по радиусу наружу и вверх за счет центробежных сил и внутреннего расширения наружу конуса 30. Плотность поступающей пульпы может соответствовать плотности рудных концентратов, имеющих плотность примерно 3,0. Частицы с меньшей плотностью, содержащиеся в поступающем сырье, мигрируют с радиально внутренней стороны по мере того, как поступающее сырье перемещается к разгрузочному отверстию для поступающего материала с меньшей плотностью. Более тяжелые, плотные целевые материалы (например, золото) движутся радиально снаружи по мере того, как поступающее сырье перемещается к разгрузочному отверстию 50 для поступающего материала с малой плотностью, и задерживаются в "кольцах концентратора". После остановки концентратора, более тяжелые, плотные целевые материалы, захваченные в пазах 33 колец концентратора, собираются и удаляются через центральное отверстие 14 отвода концентрата. За конусом 30, между внешней поверхностью 39 конуса 30 и кожухом 20 корпуса ротора сформирована водяная рубашка 40 высокого давления. Вода внутри находящейся под давлением водяной рубашки 40 может продавливаться по радиусу внутрь через отверстия для создания кипящего слоя в конусе 30, для псевдоожижения пульпы и отделения захваченных частиц малой плотности от более плотных целевых материалов.
На фиг. 2 схематично показан каркас 38 конуса перед формованием, в котором представлены некоторые частные особенности изобретения, в соответствии с некоторыми вариантами выполнения. На каркасе 38 имеется ряд детекторов 34, которые могут быть установлены в заданных местах каркаса 38, например, помещены и/или закреплены на некоторых элементах 36 конструкции. Ряд детекторов 34 могут быть прикреплены к каркасу через адаптер, например, хомут, адгезив, на плотной посадке, или иным соединением, использующим охватывающую/охватываемую части. Адаптер (не показан) или часть детектора 34 могут иметь геометрию, сопряженную с каркасом 38, так, чтобы можно было регулировать относительное радиальное положение детектора 34 относительно центральной оси конуса 30, или установить с высокой точностью на каркас 38, перед заливкой уретана или другого литьевого материала. На фиг. 3 конус 30 показан после формования (т.е., залитый каркас 38 конуса), отличающийся некоторыми частными особенностями изобретения, в соответствии с некоторыми вариантами выполнения. Для ясности представления вмонтированные в конус детекторы не показаны.
На фиг. 4 схематически представлено сечение отформованного конуса, показанного ранее на фиг. 3, иллюстрирующее некоторые частные особенности изобретения, в соответствии с некоторыми вариантами выполнения. Более подробно показано, что конус 30 может иметь фланец 37 и коническую секцию, имеющую каркас 38, состоящий из нескольких ребер, и отформованный вокруг него корпус, причем отформованный корпус, предпочтительно, содержит уретан, внешнюю поверхность 39 и внутреннюю поверхность. Внутренняя поверхность может содержать концентрические кольца, состоящие из пазов 33 и гребней и/или ребер 35, находящихся между пазами 33, и один или более детекторов 34, заключенных между ними. Внутри одного или более пазов 33 может находиться ряд отверстий 31 для создания кипящего слоя.
На фиг. 5 показана фотография внешней части облицовки отформованного конуса концентратора, схематично изображающая располагающиеся под углом отверстия 31 для создания кипящего слоя и направление вращения отформованного конуса 30. На фотографии также показана нижняя часть верхнего фланца 37, формирующего верхнюю часть водяной рубашки 40.
На фиг. 6 приведен перспективный вид сечения оформованной облицовки конуса, в соответствии с некоторыми вариантами выполнения, изображенными на фиг. 3-5, на котором также показана внутренняя часть облицовки с рядом сквозных отверстий для создания кипящего слоя.
На фиг. 7 и 8 приведен схематические виды сечения отформованной облицовки конуса, в соответствии с некоторыми вариантами выполнения, также показывающие, как могут быть измерены различные давления, согласно некоторым вариантам выполнения. Как можно понять из чертежей, при вращении конуса, пульпа, помещенная в нижней центральной части конуса 30, смещается в радиальном направлении наружу (например, при ускорениях между, примерно, 30 и 90 g, более предпочтительно, между примерно 50 и 70 g, например 60 g) и вверх, через фланец 37 узла 32 конуса. Более тяжелый материал внутри пульпы (например, золото), оказывается захваченным внутри пазов/канавок 33 конуса 30, в то время как более легкие частицы в поступающей пульпе проходят через гребни/ребра 35 и поверх фланца 37, и далее в переливной желоб 50. Как показано на фиг. 8, снаружи кожуха 20 корпуса ротора могут быть, например, установлены один или более детекторов датчиков давления (например, обозначенных "С" на фиг. 8), так, что часть детектора С соприкасается с водяной рубашкой 40. Более того, как показано на фиг. 8, один или более детекторов датчиков давления (например, обозначенных "А" и "Е" на фиг. 8) могут быть, например, частично или почти полностью заделаны внутрь конуса 30, так, что часть детекторов А, Е соприкасаются с водяной рубашкой 40. Хотя это и не показано в подробностях, одна или более частей одного или более детекторов (например, детектор "А") могут быть открыты к части паза/канавки 33 для мониторинга давлений псевдоожижения со стороны воды, выходящей из водяной рубашки 40 и входящей в упомянутый паз/канавку 33. При этом можно легко определить, достаточен или нет уровень псевдоожижения, чтобы гарантировалось легкое встряхивание захваченной пустой породы и ее миграция от данного паза/канавки 33, не отрывающие и не сдвигающие захваченные ценные частицы (например, более тяжелые частицы золота) из паза/канавки 33.
На фиг. 9 показан конус, вставленный в кожух корпуса ротора, с образованной между ними водяной рубашкой. Здесь внутри водяной рубашки на внутренней части кожуха корпуса ротора может быть помещено несколько датчиков давления, и/или несколько датчиков давления может быть расположено вблизи одной или более радиально внутренних частей облицовки конуса кожуха корпуса ротора, например, внутри пазов облицовки конуса.
В качестве частного примера, детектор может быть выполнен с возможностью предоставления информации о давлении, в соответствии с некоторыми вариантами выполнения. В качестве другого частного примера, детектор может быть выполнен с возможностью предоставления информации об износе, в соответствии с некоторыми вариантами выполнения. В качестве еще одного частного примера, детектор может быть выполнен с возможностью предоставления информации как о давлении, так и об износе, в соответствии с некоторыми вариантами выполнения. Детектор может содержать, например, среди прочего, датчик давления жидкости в диапазоне давлений от 0 до 100 фунт/кв. дюйм, с выходным током 4-20 мА. Детектор может содержать, например, среди прочего, передатчик на частоте 433 МГц, передающий входной сигнал 4-20 мА внешнему приемнику. В некоторых предпочтительных вариантах выполнения, детектором, сред прочего, может быть RFID детектор. Один или более сенсоров могут, в некоторых вариантах выполнения, быть использованы для получения распределения давления в водяной рубашке. На фиг. 10 представлен частный вариант схемы, которая может комбинировать данные давления и износа от отдельных детекторов, в соответствии с некоторыми вариантами выполнения.
В соответствии с некоторыми вариантами выполнения, могут использоваться один или более детекторов и/или сенсор, содержащий устройство считывания/устройство регистрации. Например, один или более детекторов и/или устройство считывания/устройство регистрации могут, предпочтительно, использовать систему мониторинга давления в шинах, или содержать части этой системы, чтобы определять распределение давления внутри водяной рубашки 40. Информация о распределении давления может сопоставляться с эталонным распределением давления в водяной рубашке, и один или более рабочих параметров гравитационного концентратора/центробежного сепаратора 10 могут быть изменены для оптимизации работы и извлечения продукта.
Хотя это и не показано на чертежах, конус 30 может иметь один или более детекторов 34, например, первые детекторы, вторые детекторы и/или третьи детекторы. Мониторинг работоспособности одного или более первых, вторых или третьих детекторов выполняется одним или более сенсорами 60, установленными на корпусе или другой части гравитационного концентратора 10, которые передают информацию (например, по сети связи) к системе управления, включающей программируемый контроллер. В процессе работы, если/когда один или более детекторов 34 выходят из строя вследствие чрезмерного износа частей конуса 30, один или более сенсоров 60 могут указывать на необходимость обслуживания и/или могут предложить оператору замедлить или остановить гравитационный концентратор 10 снижением тока через приводной двигатель 70, и/или могут автоматически замедлить или остановить гравитационный концентратор 10 снижением тока через приводной двигатель 70 посредством системы управления, включающей ЦП, имеющий аппаратные средства, память и программное обеспечение, содержащее алгоритмы и логические представления.
Точное число и конкретное расположение детекторов 34 в конусе может изменяться в зависимости от объема требуемой информации об износе, или насколько значительными могут быть требуемые управляющие регулировки. В некоторых вариантах выполнения, два или три детектора могут иметь аналогичное размещение внутри конуса 30 вдоль оси и различное размещение по радиусу, для мониторинга износа во времени к конкретной части конуса. В некоторых вариантах выполнения, несколько детекторов 34 могут быть помещены в различных местах по вертикали вдоль оси конуса, для определения степени износа в определенных местах в сравнении с другими местами (например, износ вблизи/около дна конуса, в сравнении с износом вблизи/около средней части конуса, в сравнении с износом вблизи/около верхней кромки конуса). По одному сенсору 60 может быть использовано для мониторинга каждого детектора 34, либо один сенсор 60 может осуществлять мониторинг более одного детекторов 34. В таких вариантах выполнения, каждый из одного или более сенсоров 60 могут осуществлять мониторинг и определять, в реальном масштабе времени и в процессе работы, распределение износа конуса непосредственно на месте, без остановки, демонтажа или визуальной инспекции компонентов гравитационного концентратора.
В некоторых вариантах выполнения, детекторы 34 могут содержать радиочастотные идентификаторы (RFID), включающие метки НЧ и УВЧ диапазонов, которые встраиваются формованием или иным путем внутри полиуретана на заданной радиальной глубине относительно внутренней радиальной поверхности конуса 30, или конического элемента, например кольца концентратора, состоящего из паза 33 и гребня или ребра 35. В других вариантах выполнения, детекторы 34 могут содержать магниты, встроенные формованием или иным путем внутри полиуретана на заданной радиальной глубине относительно внутренней радиальной поверхности конуса. Описанные здесь сенсоры 60 могут содержать RFID антенну считывающего/опросного устройства или сенсор, использующий эффект Холла (в случаях, когда детекторами 34 являются магниты). Например, в некоторых случаях, сенсор 60 может содержать плату с печатной схемой, функционально соединенной с RFID антенной считывающего/опросного устройства, которая передает сигналы детектору 34, содержащему RFID метку, и принимает от него сигналы. Сенсор 60 также может содержать кабель, соединяющий плату с печатной схемой с антенной, расположенной на некотором расстоянии от этой платы. В процессе работы гравитационного концентратора 10, сенсор 60, установленный на концентраторе 10 (либо снаружи корпуса, либо встроенным внутри корпуса), обнаруживает вращающиеся детекторы 34, встроенные в конус 30. По мере износа конуса 30, его материал истончается/истирается, внутренние диаметры растут и стенки становятся тоньше. В конце концов, в некоторый момент в процессе работы, какие-то детекторы 34 могут оказаться разрушенными/израсходованными, а один или более сигналов, формируемых детекторами 34 для сенсора (-ов) 60 (и, в конечном итоге, для системы управления), могут измениться или больше не генерироваться. Такие изменения в сигналах могут указывать на то, что одна или более частей конуса 30, или весь конус 30, подверглись износу сверх одного или более заданных пределов. Информация, относящаяся к скорости износа и текущему состоянию износа конуса 30, может быть передана от сенсора (-ов) 60 к системе управления, показывая скорость износа и состояние износа в реальном масштабе времени, не требуя остановки работы, извлечения содержимого концентратора 10, или необходимости физического доступа для визуального осмотра. Для предупреждения операторов о статусе концентратора 10 или его компонентов может быть активизирована визуальная сигнализация (зеленый - норма, оранжевый - призыв к готовности, красный - предупреждение), либо звуковая сигнализация, например, сирены, рупоры или звукоизлучающие диоды. Индикаторы, предписывающие остановку работы концентратора 10, изменение некоторых рабочих параметров (скорости вращения, мощности или продолжительности рабочего цикла) концентратора 10, или замену, или восстановление конуса 30 до его чрезмерного износа/повреждения, могут иметь любую приемлемую форму.
В соответствии с некоторыми вариантами выполнения, как показано, один сенсор 60 может быть, в частности, использован для одного или более корпусов и/или частей каркаса концентратора 10. В некоторых вариантах выполнения (не показано), один или более сенсоров 60 могут быть помещены на одной или обеих концевых частях корпуса концентратора, так, что детекторы 34 всегда находятся в целом в пределах направления прямой видимости, вдоль или, в основном, параллельно оси вращения конуса. При этом сенсоры 60 смогут обнаруживать существование детекторов 34 без периодического прерывания. Такие сенсоры 60 концевого размещения могут иметь круглую или кольцевую форму, или, в другом варианте, могут быть размещены кольцом для более точного отслеживания кольцевых траекторий движения детекторов 34 при их вращении вокруг оси вращения узла конуса и кожуха корпуса ротора. Связанные с сенсорами 60 антенны могут быть ориентированы, среди прочего, в основном горизонтально, в основном вертикально, и/или в основном по диагонали. Сенсоры 60 могут устанавливаться на концентраторе 10 в любом количестве или с любым расположением. Сенсоры 60 могут обеспечивать мониторинг различных радиочастотных идентификационных датчиков (RFID) или УВЧ (UHFID), а детекторы 34 могут иметь различные транспондеры, резонирующие/формирующие сигнал на различных частотах. В некоторых случаях, все детекторы 34 в первом месте конуса 30 могут иметь одинаковую первую рабочую частоту, а все детекторы 34 в другом, втором, месте конуса 30 могут иметь вторую одинаковую вторую рабочую частоту, отличающуюся от первой рабочей частоты. В других случаях, все детекторы 34 могут работать на одной частоте, и сенсор (-ы) 60 могут идентифицировать каждый детектор на основании его индивидуального идентификатора. Например, детекторы 34 могут содержать индивидуальные RFID метки, а сенсор (-ы) 60 может содержать считывающее устройство и антенну, настроенную на определенную несущую частоту, которая может считывать RFID метки, настроенные на эту конкретную несущую частоту. В некоторых случаях, для разных точек на конусе несколько несущих частот может и не использоваться. В определенных вариантах выполнения, детекторы 34, расположенные дальше от сенсора (-ов) 60, могут работать на более высоких частотах, чем детекторы 34, расположенные ближе к сенсору (-ам) 60 (или наоборот), с тем, чтобы увеличить дальность связи или снизить взаимные помехи. В других частных вариантах выполнения, все детекторы 34, расположенные радиально ближе к оси, могут работать на первой частоте, все детекторы 34, расположенные радиально дальше от оси, могут работать на третьей частоте, а все детекторы с промежуточным расположением внутри конуса 30 могут работать на второй частоте, причем каждая из первой, второй и третьей частот могут отличаться друг от друга.
В альтернативном, хотя и не показанном на чертежах варианте, помимо одного или более из размещенных на установке или имеющих проводную связь сенсоров 60, могут, в частности, использоваться и переносные сенсоры (например, один или более портативных RFID ридеров) В таких вариантах выполнения, оператор гравитационного концентратора 10 может периодически проверять состояние конуса 30 в процессе работы, или использовать один ридер для различных удаленно расположенных гравитационных концентраторов 10, в которых применяются раскрытые здесь устройства. В переносных ридерах могут использоваться необходимые аппаратные средства и подходящее программное обеспечение, для обеспечения надлежащей связи с одним или более детекторами 34.
ПРИМЕР 1
В соответствии с одним возможным примером временной модели износа для конкретного конуса 30 в гравитационном концентраторе 10, конус 30 может первоначально содержать три детектора - каждый из которых работает на отличающейся частоте идентификатора - радиочастоте или УВЧ. В процессе использования, ближайший сенсор 60, имеющий вид считывающего устройства (ридера) РЧ или УВЧ, может генерировать первый контрольный сигнал, второй контрольный сигнал и третий контрольный сигнал. Во время вращения конуса 30, детекторы 34 могут проходить мимо сенсора 60 и возвращать первый, второй и третий подтверждающие сигналы, соответственно. В некоторых случаях, при идеальных условиях работы, все три детектора могут быть полностью работоспособными и поэтому выдавать все три подтверждающих сигнала. В этих случаях, сенсор 60 может передать состояние нормальной работы в систему управления гравитационного концентратора 10.
В том же самом примере, наиболее радиально близкий к оси первый детектор может быть израсходован полностью или частично в результате износа, и поэтому может быть отправлен в переливной желоб 50 вместе с пульпой в конусе 30 под воздействием гравитационных сил и из-за низкой относительной плотности. В этом случае, наиболее радиально близкий к оси первый детектор может потерять свою функциональность и поэтому может не ответить на первый контрольный сигнал. Соответственно, наиболее радиально близкий к оси первый детектор может не выработать первый подтверждающий сигнал для сенсора 60, а сенсор 60 может сообщить эту информацию в систему управления, которая выдаст сигнал предупреждения.
Далее, в результате износа могут быть израсходованы как наиболее радиально близкий к оси первый детектор, так и находящийся в среднем положении второй детектор. В этом случае, средний второй детектор может также потерять свою функциональность и, в результате, может не ответить на второй контрольный сигнал. Соответственно, только самый внутренний третий детектор может выдать третий подтверждающий сигнал в сенсор 60. При отсутствии первого и второго подтверждающих сигналов, принимаемых сенсором 60, и при наличии только одного третьего подтверждающего сигнала, принятого сенсором 60, может быть выдан аварийный сигнал. Выдача предупредительного/аварийного сигналов может включать подачу звукового или визуального побудителей оператору установки (например, сиреной или цветными огнями), либо они могут включать передачу электронного сигнала от сенсора 60 в программируемый логический контроллер (ПЛК), или центральный процессор (ЦП) в системе управления (например, контроллер пропорционального интегрально-дифференциального регулирования, ПИД), который управляет работой гравитационного концентратора 10. В том случае, когда все первый, второй и третий детекторы 34 были поглощены износом, ни один из первого, второго или третьего подтверждающих сигналов не может быть принят сенсором 60, и выдается предупреждающий сигнал о необходимости проведения обслуживания.
В некоторых вариантах выполнения, вертикальная позиция по высоте или вдоль оси вращения конуса 30 может иметь только один детектор 34. Например, в некоторых вариантах выполнения, в каждой позиции по вертикали в конусе 30 может быть установлен только один детектор 34. Может быть предпочтительным иметь разные радиальные положения детектора 34 относительно конуса 30, в зависимости от его положения по вертикали. Например, радиальное расположение детектора 34 внутри конкретного конуса 30 (например, в отношении расстояния от внутренней поверхности конуса 30) может зависеть от того, насколько быстро обычно изнашивается такой конус. Либо радиальное расположение детектора 34 внутри конкретного конуса 30 может определяться наибольшим износом, или наиболее быстрым износом. В другом примере, положение детектора 34 внутри конкретного конуса 30 может изменяться в зависимости от расположения детектора по вертикали по высоте или вдоль оси вращения конуса, либо может изменяться в зависимости от вертикального положения детектора относительно гравитационного концентратора 10 в целом. Например, в частном варианте, если одна или более нижняя или верхняя части 30 конуса могут быть более подвержены износу, тогда в каждой одной или более нижней или верхней частях 30 конуса могут быть установлены детекторы 34, расположенные радиально дальше наружу и/или дальше от оси вращения конуса 30, чем детектор 34, расположенный в области конуса, менее подверженной износу. Для специалистов должно быть понятны преимущества конструкций конусов с идеальным расположением детекторов, либо специальным выбором расположения детекторов внутри конуса, на основе известных профилей износа и максимальных порогов износа для конкретных мест на конусе 30.
Сенсор 60 может содержать считывающее устройство (ридер) RFID или UHFID, которое может работать на нескольких частотах. Могут быть выработаны первый контрольный сигнал, второй контрольный сигнал, третий контрольный сигнал, четвертый контрольный сигнал и пятый контрольный сигнал (например, одним сенсором 60). Первая часть конуса 30 может быть оснащена детектором 34, способным работать на частоте первого контрольного сигнала; вторая часть конуса 30 может быть оснащена детектором 34, способным работать на частоте второго контрольного сигнала; третья часть конуса 30 может быть оснащена детектором 34, способным работать на частоте третьего контрольного сигнала; четвертая часть конуса 30 может быть оснащена детектором 34, способным работать на частоте четвертого контрольного сигнала; и пятая часть конуса 30 может быть оснащена детектором 34, способным работать на частоте пятого контрольного сигнала.
В случае использования расходуемых детекторов износа, при истирании, отделении или повреждении детектора 34 в первом положении на конусе 30, он не сможет выработать первый подтверждающий сигнал или эквивалентный ему ответ для сенсора 60. В результате, система управления, функционально связанная с сенсором и/или детектором, может получить информацию о том, что первая часть конуса 30 подверглась износу сверх установленного порогового износа и может требовать замены, и/или оператор получил предупреждение об этом посредством звукового сигнала, визуального сигнала, по электронной связи, и др. В таком случае, оставшиеся детекторы 34 в частях конуса со второй по пятую могут продолжать выдавать, соответственно, второй, третий, четвертый и пятый подтверждающие сигналы. В такой ситуации, система управления может сообщать о полной работоспособности каждого из второго, третьего, четвертого и пятого детекторов 34. В том же примере, если используются нерасходуемые, или измерительные детекторы (например, содержащие схемы на печатных платах, или сменные одноразовые изнашиваемые элементы измерительного датчика), по мере износа или повреждения частей детектора 34 на первой части конуса 30, он может выдавать измененный первый подтверждающий сигнал. Данные относящиеся к изменениям в первом подтверждающем сигнале, могут быть измерены, зарегистрированы и обработаны в сенсоре 60 и/или системе управления, для демонстрации оператору приблизительной степени износа в первой части конуса. Индикация рабочего состояния может осуществляться посредством графического интерфейса пользователя, мобильного приложения, push-уведомления или светящейся панели управления и др.
Могут использоваться без ограничения различные частные способы встраивания детектора 34 в конус 30, как это показано на фиг. 5-9Б находящейся в совместном рассмотрении заявки РСТ/ЕР2014/060342. Например, в приемную часть с резьбой во внешней поверхности 39 уже отформованного полиуретанового конуса 30 может быть ввинчена резьбовая вставка с полостью для установки в нее детектора 34. В альтернативном варианте, детектор 34 может быть помещен в полость внутри ранее отформованного полиуретанового конуса 30, и закрыт заглушкой, которая может быть вклеена, приварена или прикреплена иным способом к полиуретановому конусу 30. Хотя это и не показано на чертежах, заглушка может иметь несколько отдельных защелкивающихся элементов крепления, фиксирующихся на сопряженных защелкивающихся элементах крепления на отформованном полиуретановом конусе 30, либо заглушка сама может представлять собой монолитный защелкивающийся элемент крепления, который стыкуется с сопряженными элементами на конусе 30. Кроме того, части конуса 30, окружающие заглушку, или части заглушки могут включать элементы рельефа поверхности, бороздки, каналы или выступы для улучшения фрикционного сцепления или проникновения скрепляющих средств, например, адгезива или состава для заделывания швов. В другом варианте, детектор 34 может быть встроен в полость в полимерном материале (например, полиуретане) конуса, совместно с ним отформован или отлит, для получения отформованного конуса 30. Далее, в некоторых вариантах выполнения, на полость в конусе 30 может быть помещена заглушка для удерживания и герметизации в ней детектора 34. Заглушка может иметь по меньшей мере одно отверстие, выполненное с возможностью введения в него и удерживания крепежных средств, входящих в зацепление с по меньшей мере одной резьбовой приемной частью в отформованной конусе 30.
В некоторых вариантах выполнения, детектор 34 может быть помещен в полость внутри отформованного конуса, а сверху может быть вставлена коническая заглушка и вклеена, заварена или иным способом прикреплена связующими средствами к конусу 30. Коническая заглушка или окружающие части конуса 30 могут иметь рельеф для улучшения фрикционной связи или увеличения площади поверхности контакта связующих средств. В других вариантах выполнения, детектор 34 может быть помещен в коническую заглушку и прикреплен к остальной части конуса 30 установкой на тугую посадку, клеем, фрикционной сваркой, или иным способом посредством связующих средств. Кроме того, хотя и не показаны на чертежах, в наружных поверхностях конусной заглушки могут быть предусмотрены каналы или выступы для проникновения связующих или герметизирующих средств для крепления встроенного детектора 34. В некоторых вариантах выполнения, детектор 34 может быть залит или загерметизирован в узел заглушки, после чего помещен, прикреплен или иным способом размещен на каркасе 38 и в пресс-форме, после чего залит сверху в процессе формования законченного конуса 30. В некоторых вариантах выполнения, детектор 34 может быть помещен в каркас 38 перед заливкой без его предварительной герметизации или размещения в оболочке. В альтернативном варианте, внутри формованного конуса 30 может быть отформована глухая или сквозная полость. В эту полость может быть вставлена предварительно отформованная заглушка на плотной посадке, с использованием клея, сварки, повторного формования, с использованием резьб на заглушке и в полости, либо иными средствами механического крепления. Детекторы 34 могут располагаться по конусу 30 по кругу в различном порядке и/или интервалами, и не обязательно должны совмещаться вдоль единого радиального направления в конусе.
Для прикрепления детекторов 34 к кожуху 20 корпуса ротора или конструкции каркаса 38 конуса могут быть использованы известные в уровне техники крепежные средства. Крепежные средства могут включать любые известные устройства для соединения двух компонентов, включая, среди прочего, металлические изделия (болты, гайки, шайбы, контрящие шайбы) сварку, крепления с пружинным защелкиванием, зажимные скобы, застежки "молния", тугую посадку, гибкие втулки, пружинную посадку, или любые адгезивы.
Варианты выполнения могут включать процесс восстановления использованного конуса 30, включающий шаги: удаления наружных изношенных частей (например, полимерного материала) с каркаса 38 конуса, очистки каркаса 38 для его модификации, прикрепления новых детекторов 34 к очищенному/модифицированному каркасу 38 и повторное формование нового конуса 30 с новыми детекторами 34 расположением очищенного/модифицированного каркаса 38 с новыми детекторами 34 в пресс-форму, и повторная заливка под давлением этой сборки для формирования нового конуса 30. Например, металлический каркас 38 использованного конуса 30 может быть полностью извлечен и подвергнут обработке струей воды, пескоструйке, и обжигу для удаления с конструктивных элементов 36 каркаса оставшихся частей конуса 30, которые могут содержать уретан. После шага удаления может выполняться повторное формование, когда каркас 38 покрывается новым внешним слоем для формирования полностью восстановленного/переделанного конуса 30. Во время или после повторного формования, один или более детекторов 34 могут быть помещены внутрь внешней полимерной части конуса (например, слоя полимера или уретана). Также предусматриваются процессы восстановления поверхности конуса, когда внутренние и/или наружные поверхности конуса подвергаются "повторному формованию", по аналогии с восстановлением протектора автомобильных шин. В таких вариантах выполнения, использованный конус может быть восстановлен, например, путем: механического снятия изношенных секций конуса 30 для их удаления, прикрепления или встраивания новых детекторов 34 на частях подвергнутого механической обработке конуса, с дальнейшим помещением сборки в пресс-форму и повторной заливкой и формованием сборки для получения новых поверхностей конуса.
В соответствии с другими вариантами изобретения, детекторы 34 могут быть выполнены с возможностью работы с сенсором 60, установленным внутри вала кожуха корпуса ротора или узла конуса, или имеющим иную функциональную связь с вращающимся валом (например, внутри водяной рубашки 40). Соответственно, данные могут быть приняты от детектора 34 без прерываний из-за периодического кругового прохождения детектора 34 мимо других компонентов концентратора 10. В таких случаях, конус 30 может содержать детектор износа в виде вафлевидного детектора износа с печатной платой. По мере истирания вафлевидного детектора износа меняются электрические соединения, проходящие по печатной плате, в результате чего изменяется сигнал к сенсору 60 и/или контроллеру гравитационного концентратора. Провод, отходящий от детектора 34 износа, может поддерживать связь с сенсором 60 и контроллером гравитационного концентратора (не показан) по беспроводному каналу или посредством проводного соединения.
Например, конус 30 может содержать штыревидный детектор износа, имеющий ряд параллельных цепей, к которым приложено известное напряжение. Штыревидный детектор износа может быть помещен внутри конуса 30 на заданном расстоянии от внутренности, когда конус 30 новый или заново восстановлен. В процессе работы, по мере износа конуса 30, никаких доступных измерению изменений детектором обнаружено быть не может, поскольку ток в каждой из параллельных цепей остается прежним. Соответственно, сенсор 60, функционально соединенный или связанный с детектором (через беспроводное или проводное соединение), может не сообщить об изменении работоспособности в систему управления и/или не подать предупреждающий сигнал. Однако по мере дальнейшего износа, другие части детектора начинают разрушаться, разрывая другие наружные параллельные цепи внутри детектора. Это, в свою очередь, может вызвать изменение токов в оставшихся параллельных цепях детектора. При дальнейшем износе, ток через каждую оставшуюся неповрежденной параллельную цепь может существенно возрастать, пока он не превысит установленный порог или нормальное функционирование детектора вообще станет невозможным - при этом будет достигнут максимальный допустимый износ и, предпочтительно, сработает сигнал тревоги для соответствующего детектора. Выбор задаваемого порога должен соответствовать характерному периоду замены/восстановления конуса 30, продолжительность которого определяется особенностями его функционирования, максимальным или минимальным рабочими интервалами или рабочими допусками, зависящими от внутренних радиальных размеров или профилей нового конуса и/или технических норм. При выборе задаваемого порога, следует стремиться к достижению максимального срока службы конуса 30, не допуская ухудшения эффективности или заранее не ограничивая его срок службы.
В некоторых вариантах выполнения, вафлевидные пробники или штыревидные детекторы могут содержать специализированные сверхтонкие печатные платы, которые могут быть в водозащитном исполнении по классу IP68 и способны работать при температурах в интервале от минус 20° до +80°С. Для непосредственного питания детекторов может использоваться источник питания (например, = 12 В с максимальным током потребления 20 мА), либо питание может осуществляться по последовательной шине от сенсора, системы управления или сети. Могут быть использованы другие напряжения и токи, в зависимости от характеристик конкретного используемого детектора. В некоторых случаях, питание может подводиться к детекторам по комбинированному кабелю передачи питания и данных, соединенному с сенсором 60, системой управления или сетью. В альтернативном варианте, детекторами 34 могут быть автономные устройства с батарейным питанием, связанные с сенсором, системой управления или сетью с использованием стандартов ZigBee® беспроводной связи (802.15.4) или другого протокола беспроводной связи (например, стандарта на основе IEEE 802.11). Части сенсора 60, системы управления или сети могут находиться внутри вращающегося вала гравитационного концентратора 10, либо иным способом функционально соединены с вращающимся валом посредством щеточного контакта или аналогичного устройства, обычно используемого в электродвигателях. Более того, части сенсора 60, системы управления или сети могут находиться, среди прочего, внутри внутренних или внешних частей корпуса концентратора, кожуха корпуса ротора и/или узла конуса 30, или на них. Например, одна или более частей сенсора 60 может быть расположена внутри водяной рубашки 40, и др.
В качестве шлюза между аппаратными средствами детектора/сенсора и более общей системой концентратора/управляющими процессами установки может использоваться не упоминавшийся ранее компьютер человеко-машинного интерфейса (ЧМИ). Компьютер ЧМИ может иметь совместно используемые интерфейсы или интерфейсы нескольких сетей, например, по меньшей мере один интерфейс для выделенной сети мониторинга износа и давления концентратора, и по меньшей мере один интерфейс всей сети сепараторного процесса. В альтернативном случае, компьютер ЧМИ для мониторинга износа конуса может работать полностью независимо от любой сети сепараторного процесса/установки. На компьютере ЧМИ могут быть установлены один или более программных компонентов, позволяющих ему выполнять все необходимые функции для визуального представления, анализа и управления сигнализацией, а также передачи данных и их архивирования. Обработка входных данных может упрощаться "незапрашиваемыми" передачами от каждого сенсора 60 с данными, соответствующими детекторам 34 и, поэтому, каждый сенсор 60 может иметь свой уникальный Ethernet (IP) адрес и может связываться по выделенной Ethernet сети с компьютером ЧМИ/ПК центральной аппаратной. Данные могут поступать из детекторов 34 и накапливаться в каждом сенсоре 60 в течение заданного интервала, по окончании которого сенсор 60 может направить пакет данных к компьютеру ЧМИ/ПК центральной аппаратной. Программное обеспечение компьютера ЧМИ или ПК центральной аппаратной может получить этот пакет данных и "распаковать" их в ОРС теги (ОРС - от англ. Object Linking & Embedding for Process Control - интерфейс компоновки объектов для семейства программ управления объектами автоматизации и технологическими процессами), которые могут быть сделаны доступными для всех других внутренних и внешних пользователей. Измерительные точки, записанные в ОРС тегах, могут быть конфигурируемыми, и могут быть зарегистрированы в базе данных SQL-типа (SQL - язык структурированных запросов, от англ. Structured Query Language) для последующего анализа. Для просмотра процессов износа конуса в прошлом или сведений об происходящих ранее изменениях давления может быть использован операторский терминал для доступа к архиву данных и средствам анализа. Посредством этого терминала, может выполняться визуальное сравнение данных для большого числа различных двумерных и/или трехмерных диаграмм и графиков. Данные также могут предоставляться в необработанном формате, для визуализации и копирования для экспорта в другие программы. Данные могут извлекаться из одного или многих детекторов 34, сенсоров 60, гравитационных концентраторов 10, аппаратных средств, или сепарационного оборудования. В некоторых вариантах выполнения, продолжительность упомянутого интервала может быть выбрана от нескольких минут до времени нахождения системы в состоянии работы, в зависимости от объема памяти жесткого диска для регистрации данных. Если от компьютера ЧМИ также требуется специализированное и всестороннее управление сигнализацией, то может использоваться программа управления сигнализацией. Например, по умолчанию может использоваться "базовый" режим сигнализации, в котором на дисплее (не показан) схематически изображаются различные части узла конуса, изменяющие цвет от зеленого к желтому, к красному (включая и любые промежуточные и дополнительные цвета), в зависимости от состояния детекторов внутри конуса. Могут быть использованы цифровые обозначения, когда, например, 100% может обозначать отсутствие износа, 50% может обозначать половину срока службы, а 0% может указывать на максимально допустимую степень износа. Уровни и пороги могут быть выбраны и заданы заранее в процессе конфигурирования системы, отрегулированы в процессе работы, либо могут быть сброшены в исходное положение по умолчанию (например, при повторном вводе в эксплуатацию). В более совершенной программе управления сигнализацией, условия подачи сигналов могут включать задержки, расширения или даже последовательности условий. Реакции могут варьироваться от простых сообщений до сообщений внешним абонентам (например, email-уведомления, уведомления, передаваемые по пейджеру, речевые/текстовые по сотовой связи и др.).
Данные и состояние системы в реальном масштабе времени могут визуально демонстрироваться на дисплее, управляемом программой с компьютера ЧМИ, или любого другого ЦП в сети установки, имеющего доступ к ОРС данным на компьютере ЧМИ. Программа управления дисплеем может визуально представлять состояние всей установки в цветовой кодировке для состояния цепей всего концентратора, состояния гравитационного концентратора, состояния конуса, состояния давления, состояния износа, состояния детектора или состояния сенсора. В некоторых вариантах выполнения, любой сенсор 60 может быть выбран для отдельного ознакомления щелчком мыши с использованием программы управления дисплеем. На изображениях сенсора 60 могут быть показаны данные отдельного детектора 34 для каждой части или конкретной части конуса 30, с цветовыми кодами, числами или другими признаками состояния и/или текущего или прошлого функционирования (например, текущей и/или прошлой скорости износа, текущей степени износа, текущего внутреннего диаметра/радиуса конуса, или показателя остаточного ресурса в % и др.). Кроме того, посредством щелчка мыши внутри большой системы, содержащей несколько концентраторов 10, могут быть выбраны отдельные части конуса, или отдельные конусы концентратора для просмотра подробной информации о состоянии, касающейся тех показателей, которые обычно не отображаются на других видах более высокого уровня иерархии (например, виды, иллюстрирующие работу общей системы концентратора и/или виды, иллюстрирующие работу гравитационного концентратора).
Может также быть представлен скользящий график, который, в некоторых вариантах выполнения, может показать тенденции изменений за, например, 24 последних часа или более (например, диаграммы за прошедшую неделю или прошедший месяц). Могут использоваться средства связи, которые передают выходные значения ОРС тегов, например, в интерфейсный процессор с посимвольной обработкой (CHIP - от англ. Character Handling Interface Processor) или информационную систему предприятия (PI - от англ. Plant Information), или иной сервер, пригодный для работы с ОРС. Теги для выдачи данных могут выбираться индивидуально, а имена тегов в целевой системе могут быть определены для каждого тега. В альтернативном случае, внешний ОРС сервер, позволяющий поддерживать связь с использованием OPC/DA (адрес получателя - от англ. Destination Address), может запрашивать данные тега непосредственно от компьютера ЧМИ. Также могут быть использованы программы инкапсуляции ("Tunneling") пакетов данных ОРС, например, Matrikon, PI Tunneler или ОРС Mirror (продукт компании Emerson Process management), для установления защищенных линий связи с компьютером ЧМИ для выборки данных.
В некоторых вариантах выполнения, сенсоры 60 могут периодически (например, в частности, каждые 5 или 10 секунд) собирать и обрабатывать данные от детекторов 34, установленных в конусе, и передавать данные в контроллер (например, компьютер ЧМИ) по его шине данных. В зависимости от типа используемых детекторов 34, сенсоры 60 могут обеспечивать питание, извлечение данных, обработку данных и конфигурирование/оптимизацию функций. Связь детектора с сенсором может быть либо проводной, либо беспроводной, причем на каждый сенсор 60 может приходиться по несколько детекторов 34 (разных типов). В некоторых частных вариантах выполнения, сенсоры 60 могут быть помещены в полимерные чехлы с заводской герметизацией, выполненные по классу воспламеняемости, превышающему нормы стандарта UL94-HB, оснащенные элементами для прикрепления к разным компонентам гравитационного концентратора 10, например корпусу. В некоторых частных вариантах выполнения, сенсоры могут подвергаться испытаниям на степень защиты от проникновения физических тел по нормам NEMA 4X/IP 65, устойчивость к рабочим температурам от минус 20°C до +60°C, и температурам хранения от минус 40°C до + 80°C и др. В некоторых частных вариантах выполнения, сенсоры могут питаться от напряжения = 12 B или = 24 В (0,2 А), подводимого от изолированного источника по кабелю шины и др. Протоколы связи/данных шины сенсора могут включать многоточечную сеть RS-485 с защитой от статического электричества напряжением до 15 кВ и переходных процессов, и др. В некоторых вариантах выполнения, для соединения сенсоров с различными частями сепарационного оборудования могут использоваться экранированные кабели типа DeviceNet. Могут также использоваться средства, позволяющие выполнять модернизацию на месте встроенных программ оборудования благодаря наличию встроенных загрузчиков операционной системы.
Один или более сенсоров 60 могут быть установлены на валу, вместо внешнего корпуса. Между одним или более детекторами 34, расположенными на конусе 30 или внутри него, и одним или более сенсорами 60, может быть установлена беспроводная связь в диапазоне радиочастот или УВЧ. В альтернативном варианте, могут быть, в частности, использованы проводные соединения. В некоторых вариантах выполнения, проводные соединения могут включать экранированные кабели, водонепроницаемые кабели, кабели, устойчивые к химическим воздействиям и/или кабели, устойчивые к абразивному воздействию, которыми один или более детекторов 34 соединяют с сенсорами 60, как это показано на чертежах. Для поддержания электрического контакта между вращающимися детекторами 34 и источником питания, сенсором 60 или системой управления могут использоваться щетки с коллектором или иные типы взаимно перемещающихся проводящих контактных пар. Например, такая контактная пара может быть включена между кожухом 20 корпуса ротора и внутренней частью гравитационного концентратора/центробежного сепаратора 10 (например, между приводным валом и корпусом подшипника). В другом примере, такие контактные пары могут быть включены между фланцем 37 конуса и внутренней частью гравитационного концентратора/центробежного сепаратора 10. В другом варианте, одно или более проводных соединений может быть установлено непосредственно с сопряженной системой/сетью управления, которая выполняет функции сенсора 60. В некоторых вариантах выполнения, проводное соединение может включать USB кабель (например, со стандартным, мини или микро разъемами), либо соединение последовательной шиной другого типа. Хотя и не показано на чертежах, соединения проводной шиной могут включать шину с последовательным опросом среди соседних детекторов 34 для минимизации кабельной сети сквозь вал, на котором вращаются узлы 32 конуса.
Что касается управления, то на передней накладке каждого сенсора 60 имеется один или несколько тактильных купольных переключателей для ввода и управления конфигурацией режима работы сенсора. Этими средствами можно установить адрес сенсора 60 (например, #1, 2, 3, …, N), а также выполнить настройку и оптимизацию всех детекторов 34, присоединенных к данному сенсору 60 (в случае использования нескольких сенсоров 60).
В соответствии с приложенными чертежами, также раскрывается способ непрерывного мониторинга износа в системе концентратора. В соответствии с некоторыми вариантами выполнения, способ может включать любое число из следующих далее шагов: подготовку системы концентратора, например, системы обогащения золота, имеющей по меньшей мере один гравитационный концентратор/центробежный сепаратор 10; установку узла 32 конуса в по меньшей мере один гравитационный концентратор/центробежный сепаратор 10, где узел 32 конуса включает конус 30, кожух 20 корпуса ротора и находящуюся между ними водяную рубашку 40; установку одного или более расходуемых детекторов износа и/или одного или более датчиков давления на узле 32 конуса в любом количестве и с любыми схемами расположения; установку одного или более сенсоров 60, выполненных с возможностью непрерывного мониторинга рабочего состояния имеющихся детекторов 34; мониторинг состояния детекторов 34 в процессе работы по меньшей мере одного гравитационного концентратора/центробежного сепаратора 10; определение надлежащего времени для ремонта, замены или проверки конуса 30, или иного изменения рабочих параметров, на основании информации, полученной от детекторов 30 и сенсоров 60 (например, регулирование скорости вращения, увеличение скорости вращения, уменьшение скорости вращения, регулирование скорости подачи пульпы, увеличение скорости подачи пульпы, уменьшение скорости подачи пульпы, регулирование давления в водяной рубашке 40, увеличение давления в водяной рубашке 40, уменьшение давления в водяной рубашке 40, регулирование длительности рабочего цикла, увеличение длительности рабочего цикла, сокращение длительности рабочего цикла, регулирование скорости выгрузки концентрата, увеличение скорости выгрузки концентрата, снижение скорости выгрузки концентрата ит.д.); принятие правильного решения (например, замены изношенного конуса 30, восстановления изношенного конуса 30, остановки гравитационного концентратора/центробежного сепаратора 10 на обслуживание, снижение скорости механического вращения, увеличение скорости механического вращения, или увеличения времени пребывания/длительности рабочего цикла для компенсации снижения потерь извлечения продукта или производительности гравитационного концентратора/центробежного сепаратора 10 и т.д.).
Хотя это и не показано на чертежах, при осуществлении изобретения клиенту может быть предоставлена визуальная индикация. Представляемое изображение может, например, включать одно или более из следующего: изображение, представляющее узел конуса 32, конус 30, кожух 20 корпуса ротора, или их комбинации, одну или более иконок состояния, показывающих общее состояние узла 32 конуса, конуса 30, кожуха 20 корпуса ротора или их комбинации, одну или более иконок состояния, показывающих одно или более локальных мгновенных или усредненных давлений в различных областях узла 32 конуса, конуса 30, кожуха 20 корпуса ротора, или их комбинации, одну или более иконок, иллюстрирующих состояние контроллера, график, показывающий в реальном масштабе времени износ в каждой точке узла 32 конуса, конуса 30, кожуха 20 корпуса ротора, или их комбинации, набор иконок с номерами пазов/канавок и/или гребней/ребер (например, в последовательности сверху вниз, или снизу вверх), набор иконок состояния пазов/канавок и/или гребней/ребер, и иконок, иллюстрирующих общее состояние сенсора 60.
В некоторых частных вариантах выполнения, один или более детекторов 34 могут иметь текстуру поверхности, ряд острых выступов, ребер или иных выпуклостей, для повышения сцепления с полимером (например, полиуретаном), используемым для формования конуса 30. В некоторых варрантах выполнения, детекторы 34 могут располагаться рядом друг с другом относительно центра конуса, либо напротив друг друга для балансировки конуса 30 на высоких скоростях вращения. В некоторых вариантах выполнения, для обеспечения балансировки узла 32 конуса и сведения к минимуму вибраций в процессе работы могут использоваться один или более противовесов.
Для приема информации от детекторов 34, на корпусе гравитационного концентратора/центробежного сепаратора 10 может быть установлен по меньшей мере один сенсор 60 (предпочтительно, в верхней центрально расположенной части корпуса). В случае детекторов 34 износа, то, в зависимости от степени износа, которому подвергся конус 30, сенсор 60 может не принять сигнала от каждого детектора 34. При этом, когда сигнал от какого-либо конкретного детектора 34 прекращает считываться сенсором 60, может быть включен сигнал предупреждения, сигнализирующий о достижении установленной степени износа в месте конуса 30, относящейся к этому конкретному детектору 34, сигнал от которого перестал приниматься сенсором 60.
ПРИМЕР 2
В заданных местах на каркасе основы конуса может быть размещено несколько радиочастотных идентификационных (RFID) меток (например 5-10 шт.), с последующим их прикреплением к элементам каркаса (т.е. "ребрам") в заданных местах. Радиальные положения меток могут выбираться на заданном радиальном расстоянии от центральной оси вращения конуса. Радиальные положения меток также могут определять задаваемый максимальный предельный срок службы конуса, а метки, при их обнажении и/или израсходовании в результате износа, выполнены с возможностью прекращения передачи сигналов на совместимое RFID считывающее/опросное устройство (ридер), которое может содержать узел регистрации данных. В качестве RFID ридера может использоваться переносной ридер, который может быть помещен вблизи гравитационного концентратора/центробежного сепаратора, в котором установлен конус со встроенными в него метками.
Каркас с прикрепленными к нему метками помещается в пресс-форму и заливается полиуретаном для формирования конуса со встроенными в него метками. Для размеров конуса концентраторов G4/G5/G6 компании FLSmidth Knelson могут потребоваться метки с согласованными размерами. Поскольку считается, что пассивные (меньшего размера) метки не могут работать в присутствии воды, их предпочтительно использовать в качестве расходуемых детекторов. Поскольку получение разрешения на осмотр конуса внутри концентратора на месте может потребовать более четырех часов, это время проверки можно сэкономить, используя для определения работоспособности RFID меток считывающий сенсор.
Для проведения испытаний на выбранном месторождении, имеющем резервуар для пульпы, предназначенной для обработки, может быть использован конус с основой XD48, с установленными детекторами. На водяной рубашке (например, в местах снаружи конуса или внутри кожуха корпуса ротора), а также в местах с обратной стороны колец концентратора могут быть выбраны точки измерения давления. Могут использоваться Вариант 1 или Вариант 2.
В Варианте 1, для подачи питания = 24 В к детекторам внутри конуса используется узел токосъемных колец, и узел токосъемных колец может быть использован для приема сигналов от детекторов или передачи этих сигналов из концентратора в приемный узел, который может быть оснащен регистратором данных, либо, в ином случае, в систему управления через посредство интегрированного с ней приемника, способного принимать, обрабатывать и интерпретировать сигнал. В Варианте 2, автономные беспроводные детекторы, встроенные в конус, могут передавать данные в приемный узел.
В качестве детекторов могут быть использованы: датчики давления с выходным током 4-20 мА + беспроводные передатчики, беспроводные датчики воды, стандартные комплекты системы мониторинга давления в шинах (TPMS -от англ. Tire Pressure Monitoring System) или чувствительные к давлению пленки типа Prescale компании Fujifilm. Для испытаний, проводимых разработчиками оборудования, могут использоваться встроенные многоэлементные датчики давления. Результаты таких испытаний могут быть использованы в соответствующем масштабе для определения центров давления для натурных испытаний.
Конус, оборудованный детекторами, может быть испытан на месторождении при различных скоростях вращения и/или расходах воды при использовании воды (+ кремнезем).
ПРИМЕР 3
Совместно с конусом концентратора может быть использована система TPMS. Например, может быть использована TPMS, содержащая четыре сенсора + монитор. Сенсоры TPMS могут быть объединены с частями кожуха корпуса ротора и/или внешними поверхностями конуса. Для мониторинга в процессе работы TPMS сенсоров, интегрированных в узел конуса, может быть использован TPMS монитор, допускающий одновременный мониторинг 4, 22, 38 отсчетов. Такие варианты выполнения, использующие стандартные TPMS комплекты, могут не обладать способностью выдачи данных на портативный компьютер или устройство регистрации данных. Перед тем как установить TPMS сенсоры в узел конуса концентратора, могут быть проведены подтверждающие испытания TPMS элементов в резервуаре под давлением. Узлы с TPMS сенсорами могут быть испытаны в воде/под давлением и при вращении в кольце конуса. Могут быть исследованы варианты регистрации/выдачи данных, иные, нежели предоставляемые TPMS монитором.
ПРИМЕР 4
Как показано на фиг. 10, датчик давления может быть объединен с беспроводным передатчиком RFID. Например, датчик давления на 0-100 фунт/кв. дюйм может быть объединен с беспроводным передатчиком и оснащен источником питания = 12 В. В некоторых вариантах выполнения, может быть использована стандартная комбинация датчиков давления и RFID меток, либо они могут быть специально разработаны для использования в концентраторах, представленных в настоящем раскрытии. Предполагается, что по мере совершенствования технологии, подобные системы будут обладать улучшенными характеристиками при использовании для мониторинга конуса концентратора. Для быстрого проведения подтверждающих испытаний могут быть изготовлены прототипы для нескольких комбинаций датчик/передатчик, причем в каждой комбинации используется по меньшей мере один приемник. Представляется, что для приема данных давления и износа могут быть использованы отдельные приемники. Желательно, однако, чтобы для выполнения обеих функций мог быть использован один приемник. Также представляется, что может быть использована комбинация расходуемых детекторов и штыревидных детекторов, для резервирования и гарантии получения данных.
Хотя изобретение было описано в форме его конкретных вариантов выполнения и использования, специалист, на основании настоящего раскрытия, может предложить другие варианты выполнения и использования, не выходя за пределы существа и области притязаний заявленного изобретения. Например, различные особенности изобретения (как по отдельности, так и в комбинации) могут быть использованы в лабораторных концентраторах, концентраторах периодического действия, или концентраторах непрерывного действия и др. Рассмотренные детекторы 34 могут представлять собой пассивные метки активного запроса (ARPT - от англ. Active Reader Passive Tags), активные метки активного запроса (ARAT - от англ. Active Reader Active Tags), либо пассивные метки, оснащенные батареей (ВАР - от англ. Battery Assisted Passive) и др., которые могут работать на любой предпочтительной частоте в пределах любого используемого частотного диапазона, включая: низкие частоты (НЧ, 120-150 кГц) для расстояния между детекторами и сенсорами менее 0,1 м, высокие частоты (ВЧ, 13,56 МГц) для расстояния между детекторами и сенсорами менее 1 м. Рассмотренные здесь детекторы также могут работать в УВЧ диапазоне (например, 433 МГц, 865-868 МГц, или 902-928 МГц) или СВЧ диапазоне (2450-5800 МГц) при больших расстояниях между детекторами и сенсорами. В некоторых вариантах выполнения, рассмотренные здесь детекторы могут содержать многочастотные RFID метки, а рассмотренные здесь сенсоры 60 могут содержать многочастотный ридер. В некоторых вариантах выполнения, рассмотренные детекторы 34 могут содержать беспроводные радиочастотные микропередатчики с автономным питанием (например, содержащие радиоизотопные батареи), а рассмотренные сенсоры 60 могут содержать приемники, настроенные на ту же частоту, что и упомянутые беспроводные микропередатчики, излучающие на радиочастоте. В некоторых вариантах выполнения, данные могут передаваться в программируемый автоматизированный контроллер или программируемый логический контроллер, к которым может обращаться система управления установки. В таких случаях, можно избежать конфигураций ОРС (интерфейса компоновки объектов (OLE - от англ. Object Linking and Embedding) для семейства программ управления объектами автоматизации и технологическими процессами) и избыточных конфигураций затратной/сложной распределенной объектной модели программных компонентов (DCOM - от англ. Distributed Component Object Model), благодаря использованию других обычных протоколов, например, Ethernet/IP, Modulus (формата RTU -, ASCII -, или TCP - кадров), и/или их комбинаций (например, протокол Modulus TCP/IP, или open-mbus).
Также следует отметить, что конкретная геометрия показанных на чертежах компонентов является просто схематическим представлением и может отличаться от показанной, и автор изобретения предполагает, что в пределах области притязаний изобретения может быть реализовано любое число описанных здесь вариаций и/или комбинаций признаков или элементов. Например, в то время как несколько детекторов 34 могут быть показаны расположенными в основном с выстраиванием в радиальном и/или в вертикальном направлениях внутри конуса 30, они могут располагаться с другим характером совмещения, в других направлениях, или пространственной ориентацией, например, в основном перпендикулярно оси вращения конуса 30 (с тем, чтобы обнаруживать постепенное снижение толщины конуса 30), в шахматном порядке или со случайным расположением внутри конуса 30. Более того, детекторы 34 (при их использовании) могут заменять сенсоры (при их использовании) без каких-либо ограничений. В альтернативном случае, детекторы 34 могут не использоваться, и внутри конуса 30 могут быть установлены только сенсоры 60, выполненные с возможностью осуществления функций детектора 34. В таких случаях, при прекращении работы сенсора в каком-либо конусе 30, можно предположить, что этот конус достиг заданной степени износа и готов для замены или восстановления.
Соответственно, следует понимать, что приведенные здесь чертежи и описание представлены в качестве примера для облегчения понимания изобретения и не должны восприниматься как ограничивающие его область притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ извлечения металлической ртути из ртутьсодержащих отходов | 2015 |
|
RU2606376C1 |
| Концентрационная чаша центробежного концентратора | 2022 |
|
RU2796424C1 |
| ДВИГАТЕЛЬ ПОЛЯКОВА В.И., ЭНЕРГОБЛОК ТЕПЛОЭЛЕКТРОСТАНЦИИ, ТОПЛИВОПРИГОТОВИТЕЛЬНЫЙ АГРЕГАТ, СЕПАРАТОР ГАЗОВЫЙ ЦЕНТРОБЕЖНЫЙ, ЦЕНТРОБЕЖНЫЙ ПАРОГАЗОВЫЙ СЕПАРАТОР, ТЕПЛООБМЕННИК ТРУБЧАТЫЙ | 1999 |
|
RU2143570C1 |
| СЕНСОР, КОТОРЫЙ ВВОДИТ ПОПРАВКУ НА ДЕГРАДАЦИЮ ЛЮМИНЕСЦИРУЮЩЕЙ СРЕДЫ | 2007 |
|
RU2459196C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ШАХТНОЙ ПЕЧИ | 1992 |
|
RU2078831C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ЗАБОЙНОГО БЕСКОМПРЕССОРНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2581616C2 |
| МЕДИЦИНСКАЯ НАТЕЛЬНАЯ СЕТЬ (MBAN) С АВТОМАТИЧЕСКИМ ПРИНУЖДЕНИЕМ ИСПОЛЬЗОВАНИЯ СПЕКТРА В ПОМЕЩЕНИИ | 2011 |
|
RU2581031C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТЕРЖНЯМИ В ЯДЕРНОМ РЕАКТОРЕ | 2010 |
|
RU2578172C2 |
| МОДУЛЬНАЯ КОНЦЕНТРАЦИОННАЯ ЧАША ЦЕНТРОБЕЖНОГО КОНЦЕНТРАТОРА | 2023 |
|
RU2828038C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТЕРЖНЯМИ В ЯДЕРНОМ РЕАКТОРЕ | 2011 |
|
RU2580820C2 |
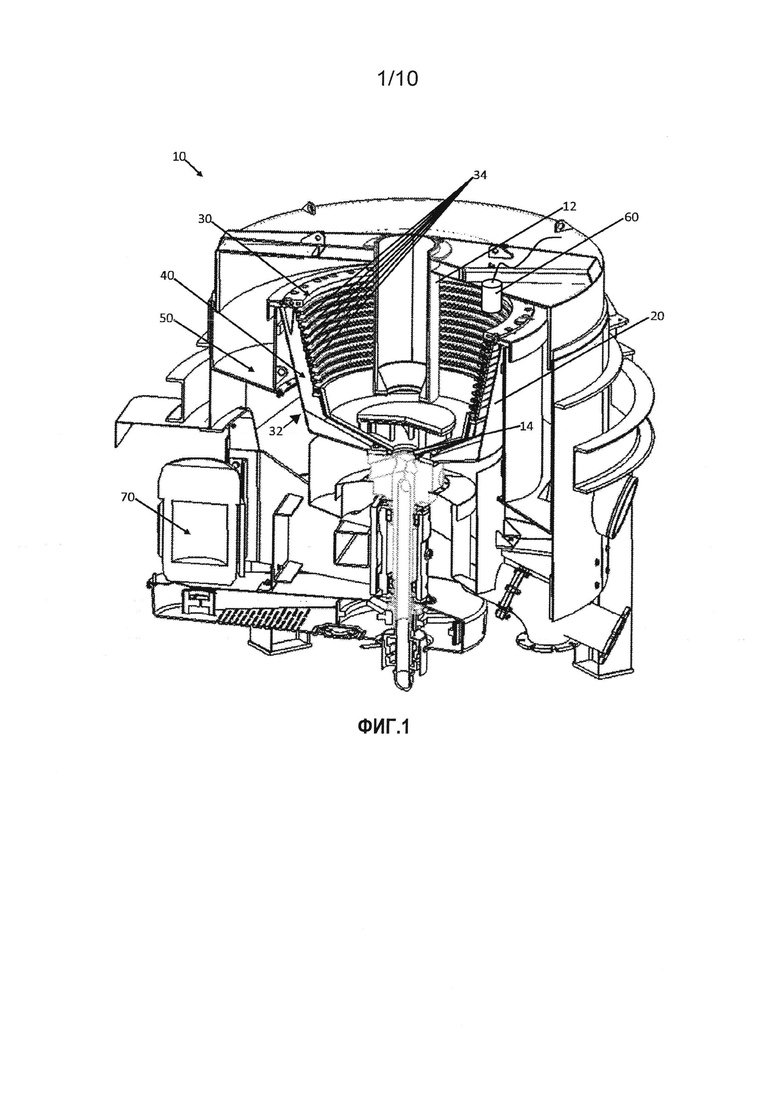
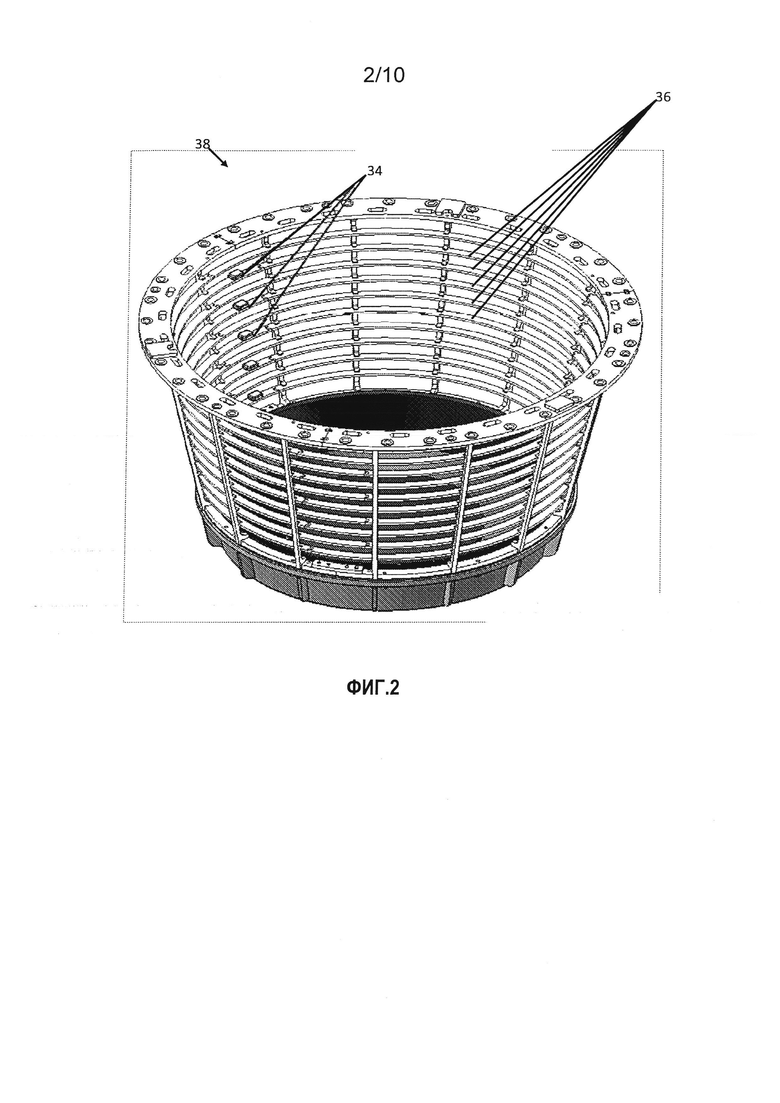
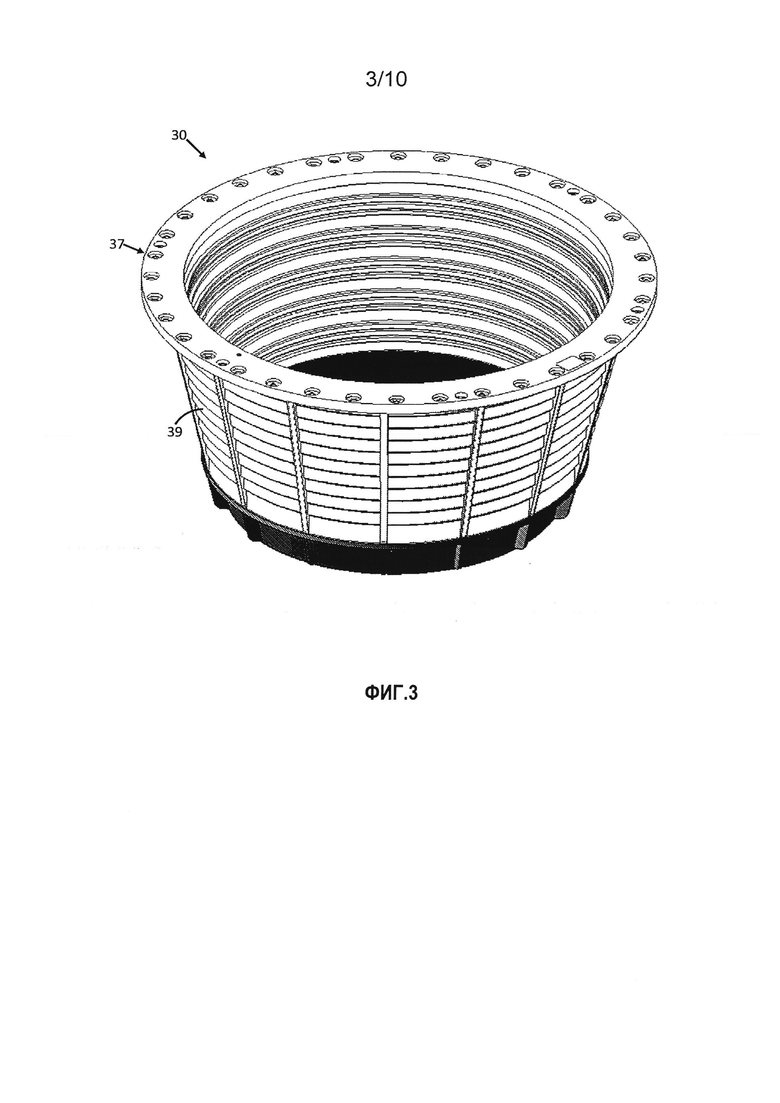
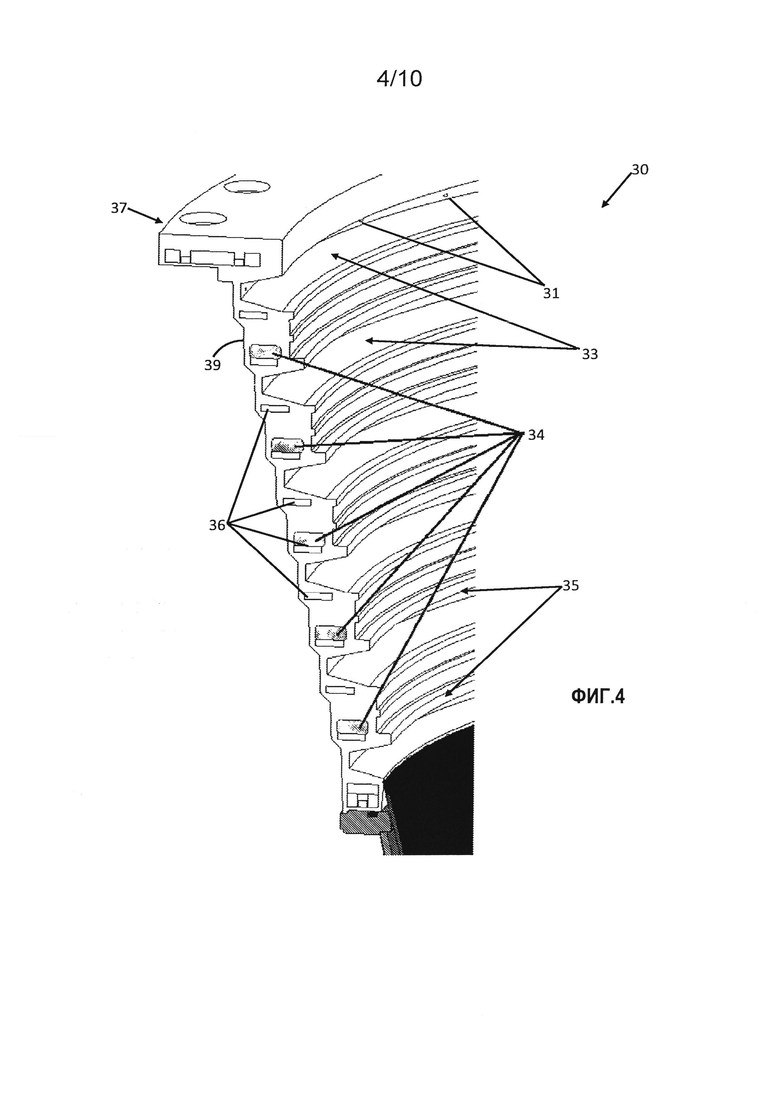
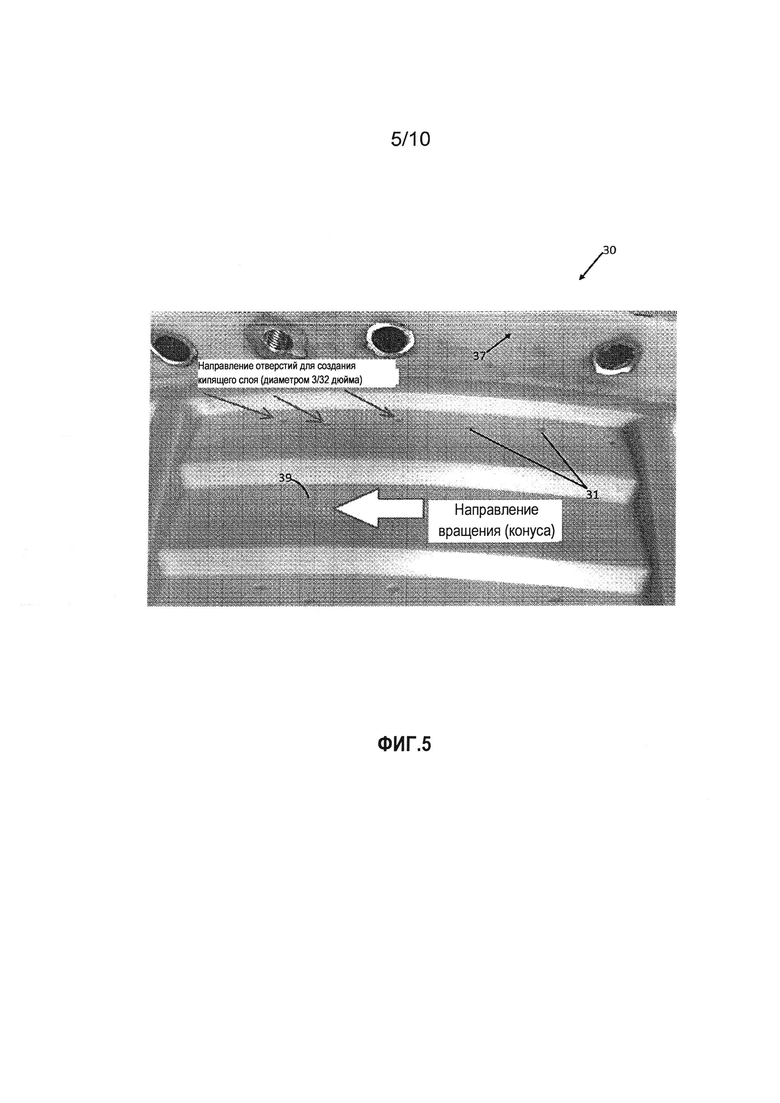
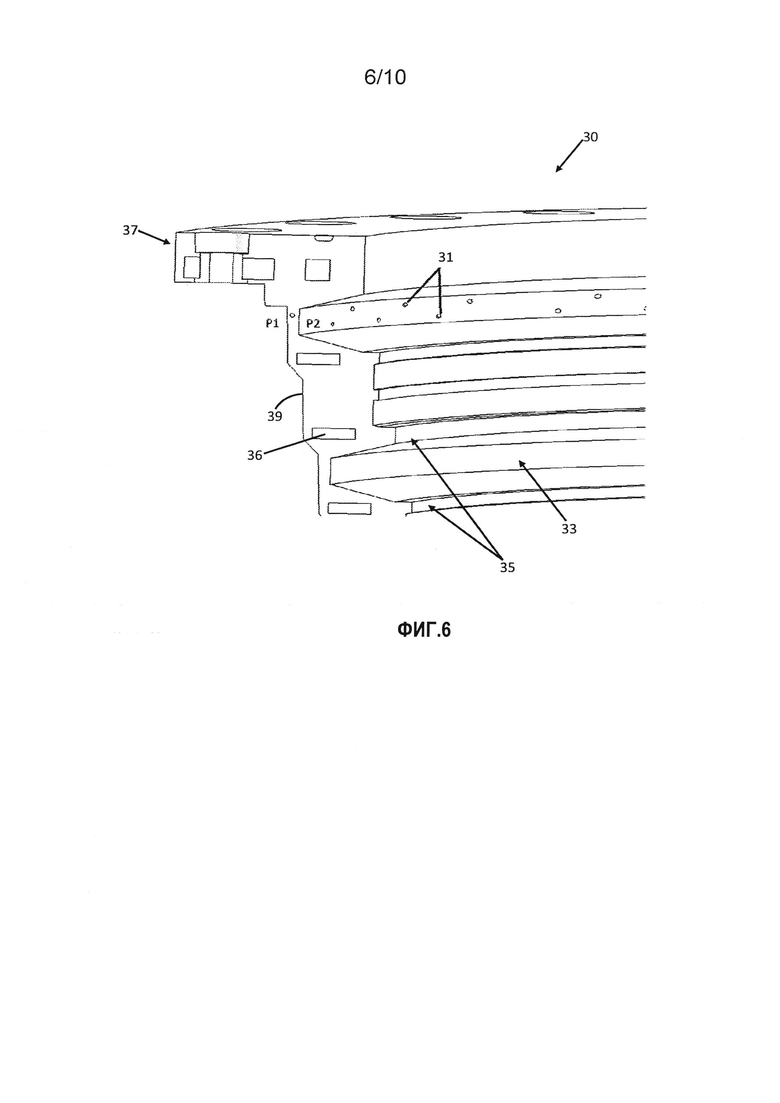
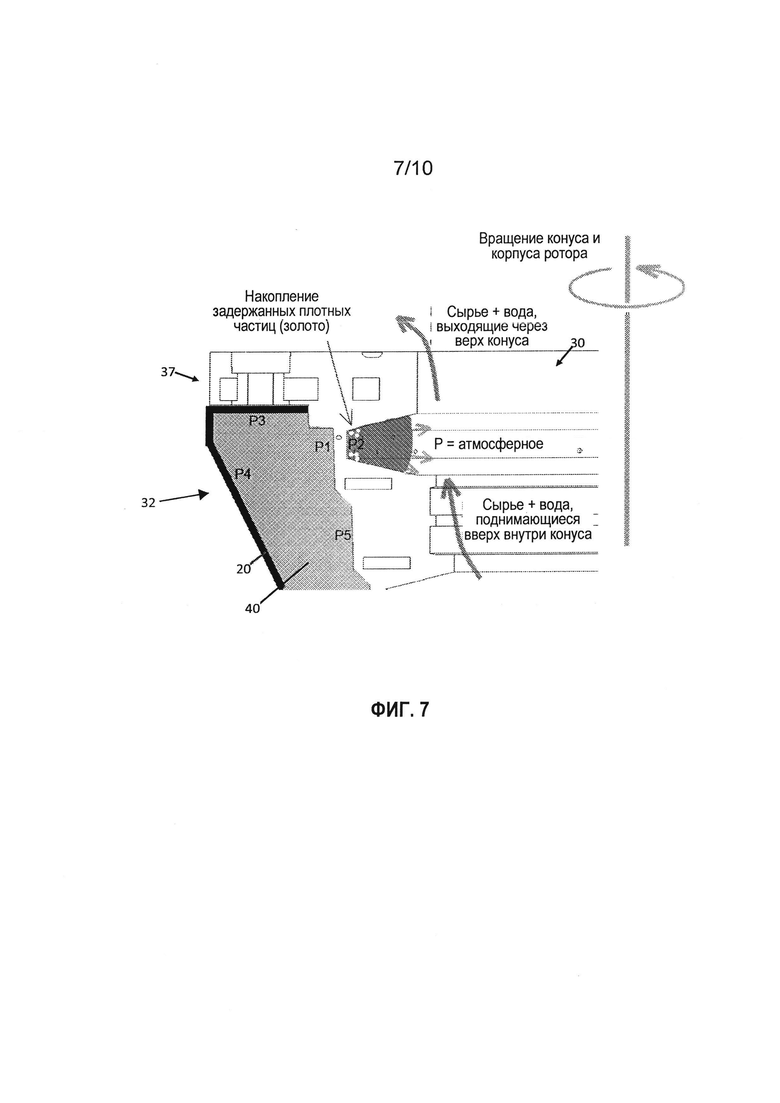
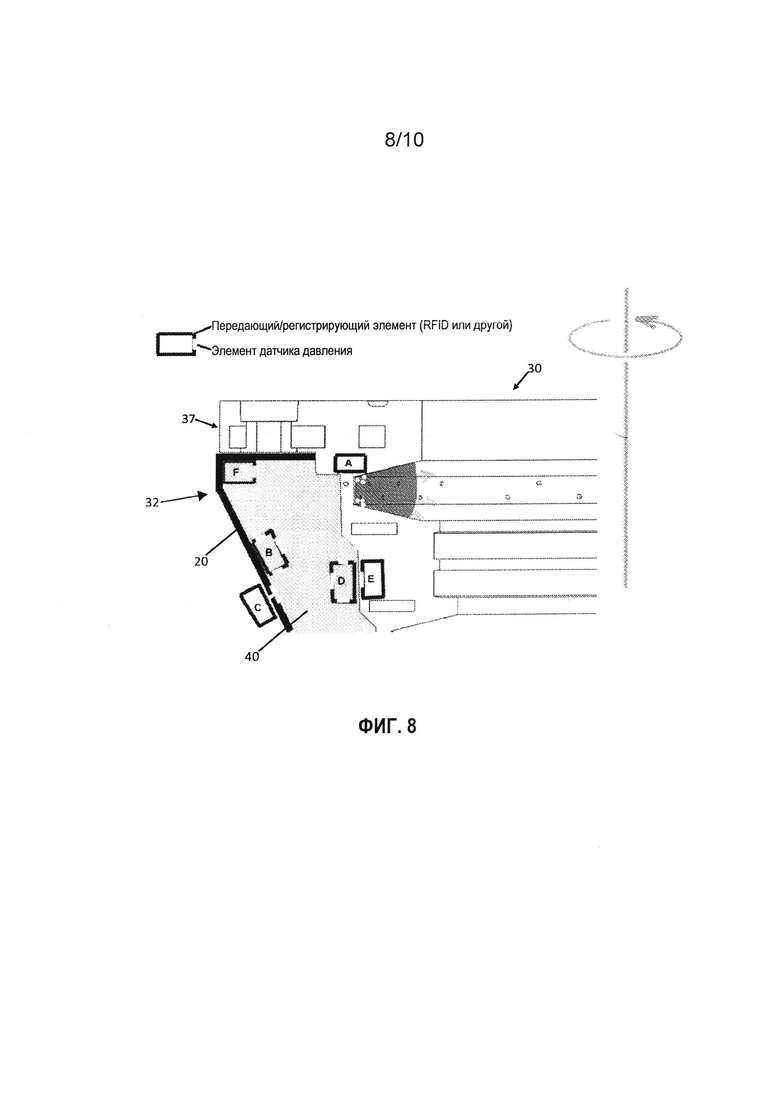
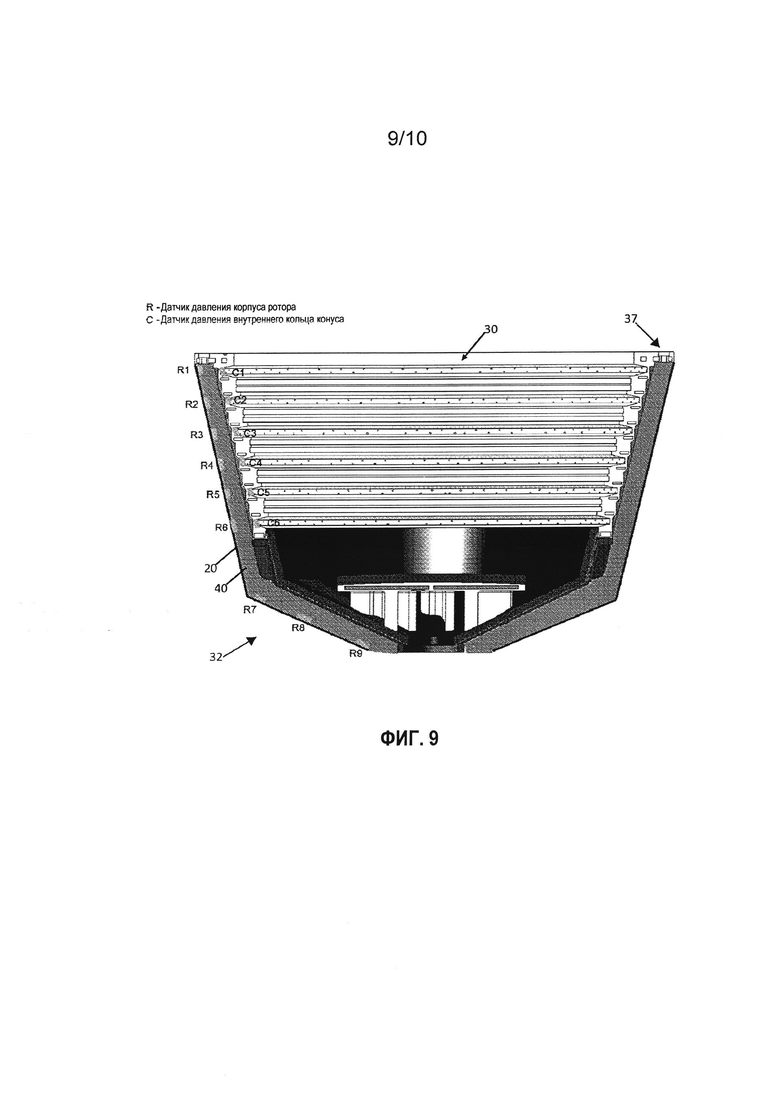
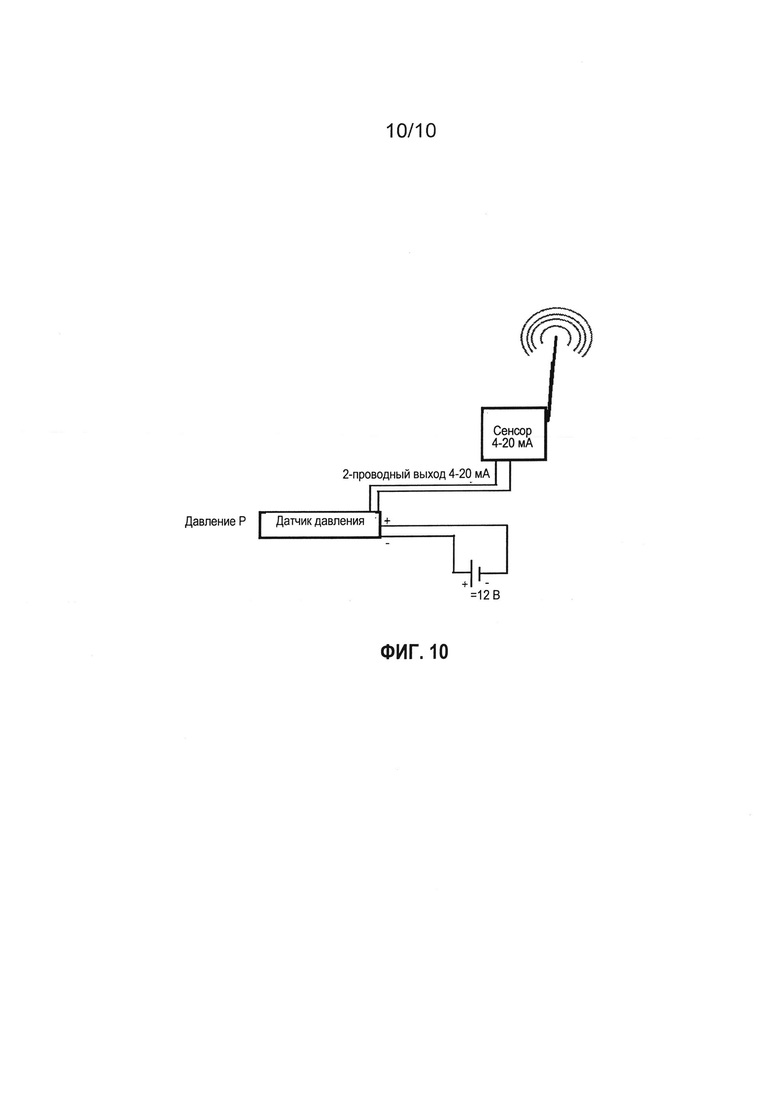
Группа изобретений относится к системе мониторинга износа и/или давления в центробежных гравитационных концентраторах и узлу для непрерывного мониторинга износа и/или давления в центробежных гравитационных концентраторах. Система непрерывного мониторинга износа и/или давления в центробежных гравитационных концентраторах содержит центробежный гравитационный концентратор, выполненный с возможностью обогащения полезных ископаемых из пульпы, имеющий узел, содержащий конус, кожух корпуса ротора и находящуюся между ними водяную рубашку, по меньшей мере один детектор, установленный в по меньшей мере конусе или кожухе корпуса ротора, или водяной рубашке, и по меньшей мере один сенсор, установленный на центробежном гравитационном концентраторе и выполненный с возможностью поддержания связи с по меньшей мере одним детектором во время работы центробежного гравитационного концентратора. При этом в процессе работы износ или изменение локального давления в конечном итоге воздействуют на функционирование по меньшей мере одного детектора и по меньшей мере один сенсор выполнен с возможностью, посредством поддержания связи с по меньшей мере одним детектором, мониторинга функционирования по меньшей мере одного детектора и определения рабочего состояния соответствующего конуса, кожуха корпуса ротора или водяной рубашки, снабженных по меньшей мере одним детектором. Узел для непрерывного мониторинга износа и/или давления в центробежных гравитационных концентраторах включает конус и кожух корпуса ротора, выполненные с возможностью использования в центробежном гравитационном концентраторе для обогащения полезных ископаемых из пульпы, причем конус и кожух корпуса ротора выполнены с возможностью формирования в собранном состоянии водяной рубашки, и по меньшей мере один детектор, установленный в конусе или кожухе корпуса ротора и выполненный с возможностью поддержания связи с по меньшей мере одним сенсором посредством сигнала во время работы центробежного гравитационного концентратора. При этом износ или изменение локального давления в процессе работы, в конечном итоге, воздействует на функционирование по меньшей мере одного детектора, и по меньшей мере один сенсор посредством связи с по меньшей мере одним детектором может обеспечивать в процессе работы мониторинг функционирования по меньшей мере одного детектора, и по меньшей мере один сенсор может обеспечивать в процессе работы мониторинг и определение рабочего состояния по меньшей мере одного детектора. Техническим результатом является повышение производительности, срока службы и коэффициента полезного действия центробежного гравитационного сепаратора. 2 н. и 18 з.п. ф-лы, 4 пр., 10 ил.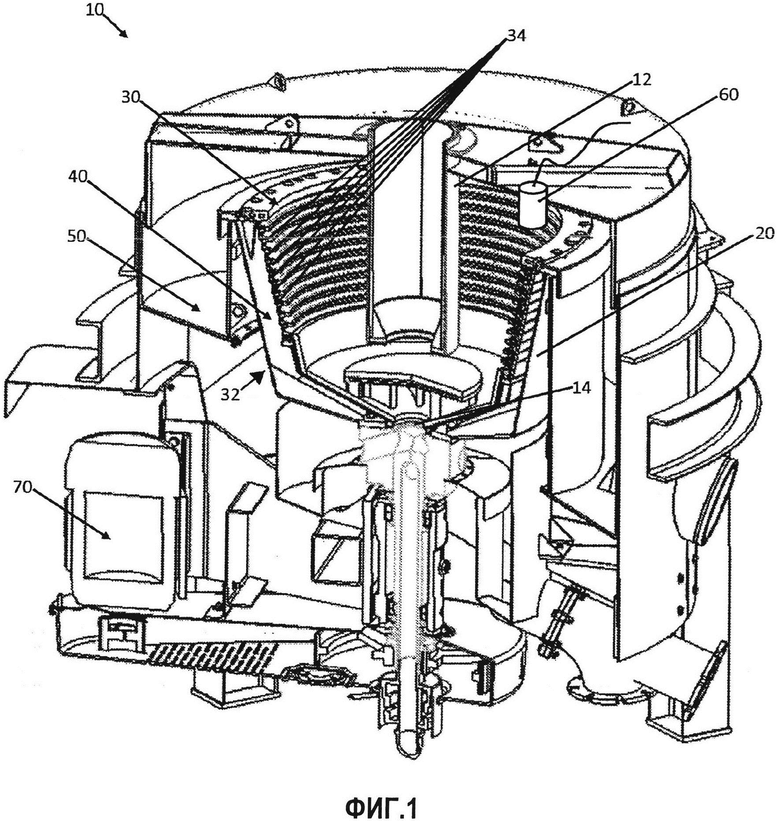
1. Система непрерывного мониторинга износа и/или давления в центробежных гравитационных концентраторах, содержащая:
центробежный гравитационный концентратор (10), выполненный с возможностью обогащения полезных ископаемых из пульпы, имеющий узел, содержащий конус (30), кожух (20) корпуса ротора и находящуюся между ними водяную рубашку (40);
по меньшей мере один детектор (34), установленный в по меньшей мере конусе (30) или кожухе (20) корпуса ротора, или водяной рубашке (40); и
по меньшей мере один сенсор (60), установленный на центробежном гравитационном концентраторе (10) и выполненный с возможностью поддержания связи с по меньшей мере одним детектором (34) во время работы центробежного гравитационного концентратора (10);
причем, в процессе работы, износ или изменение локального давления в конечном итоге воздействуют на функционирование по меньшей мере одного детектора (34); и
по меньшей мере один сенсор (60) выполнен с возможностью, посредством поддержанию связи с по меньшей мере одним детектором (34), мониторинга функционирования по меньшей мере одного детектора (34) и определения рабочего состояния соответствующего конуса (30), кожуха (20) корпуса ротора или водяной рубашки (40), снабженных по меньшей мере одним детектором (34).
2. Система по п. 1, в которой по меньшей мере один детектор (34) содержит метку радиочастотной идентификации (RFID), а по меньшей мере один сенсор (60) содержит считывающее/опросное устройство.
3. Система по п. 1, в которой по меньшей мере один детектор (34) содержит магнит, а по меньшей мере один сенсор (60) содержит датчик на эффекте Холла.
4. Система по п. 1, в которой по меньшей мере один детектор (34) содержит вафлевидный пробник, имеющий печатную плату.
5. Система по п. 1, в которой по меньшей мере один детектор (34) содержит радионуклид, способный испускать альфа-частицы и/или мягкое гамма-излучение, а по меньшей мере один сенсор (60) содержит детектор/идентификатор радионуклидов.
6. Система по п. 1, в которой по меньшей мере один детектор (34) содержит беспроводной радиочастотный микропередатчик с автономным питанием, а по меньшей мере один сенсор (60) содержит приемник, настроенный на ту же частоту, что и беспроводной радиочастотный микропередатчик.
7. Система по п. 1, в которой по меньшей мере один детектор (34) связан с сенсором (60) по беспроводному каналу.
8. Система по п. 1, в которой по меньшей мере один детектор (34) имеет с по меньшей мере одним сенсором (60) проводное соединение для обеспечения связи между ними.
9. Система по п. 1, в которой несколько детекторов (34) установлены, соответственно, на конусе (30), кожухе (20) корпуса ротора и водяной рубашке (40), снабженных по меньшей мере одним детектором (34).
10. Система по п. 1, в которой по меньшей мере один детектор (34) установлен на нескольких элементах внутри центробежного гравитационного концентратора (10), выбираемых из группы, состоящей из: конуса (30), кожуха (20) корпуса ротора и водяной рубашки (40).
11. Узел для непрерывного мониторинга износа и/или давления в центробежных гравитационных концентраторах, включающий:
конус (30) и кожух (20) корпуса ротора, выполненные с возможностью использования в центробежном гравитационном концентраторе (10) для обогащения полезных ископаемых из пульпы, причем конус (30) и кожух (20) корпуса ротора выполнены с возможностью формирования в собранном состоянии водяной рубашки (40); и
по меньшей мере один детектор (34), установленный в конусе (30) или кожухе (20) корпуса ротора и выполненный с возможностью поддержания связи с по меньшей мере одним сенсором (60) посредством сигнала во время работы центробежного гравитационного концентратора (10);
причем износ или изменение локального давления в процессе работы, в конечном итоге, воздействует на функционирование по меньшей мере одного детектора (34); и
по меньшей мере один сенсор (60), посредством связи с по меньшей мере одним детектором (34), может обеспечивать в процессе работы мониторинг функционирования по меньшей мере одного детектора (34); и по меньшей мере один сенсор (60) может обеспечивать в процессе работы мониторинг и определение рабочего состояния по меньшей мере одного детектора (34).
12. Узел по п. 11, в котором по меньшей мере один детектор (34) содержит RFID метку.
13. Узел по п. 11, в котором по меньшей мере один детектор (34) содержит магнит.
14. Узел по п. 11, в котором по меньшей мере один детектор (34) содержит вафлевидный пробник, имеющий печатную плату.
15. Узел по п. 11, в котором по меньшей мере один детектор (34) содержит радионуклид, испускающий альфа-частицы и/или мягкое гамма-излучение.
16. Узел по п. 11, в котором несколько детекторов (34) установлены на конусе (30) или кожухе (20) корпуса ротора.
17. Узел по п. 16, в котором несколько детекторов (34) установлены на частях конуса (30) или кожуха (20) корпуса ротора, имеющих разное расположение по радиусу или по окружности.
18. Узел по п. 16, в котором по меньшей мере один детектор (34) установлен на конусе (30) или кожухе (20) корпуса ротора в виде отдельного компонента.
19. Узел по п. 16, также имеющий полость внутри конуса (30) или кожуха (20) корпуса ротора, а по меньшей мере один детектор (34) установлен внутри одной или более резьбовых вставок или заглушек, вставленных в эту полость.
20. Узел по п. 16, в котором по меньшей мере один детектор (34) залит в полость, сформированную в конусе (30) или кожухе (20) корпуса ротора.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 7172144 B1, 06.02.2007 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Дугогасмтельное устройство для коммутирующих аппаратов | 1954 |
|
SU103755A1 |

