Предлагаемое изобретение относится к оптическому и оптико-электронному приборостроению и может быть использовано для определения угла скручивания контролируемого объекта относительно некоторой базы в различных отраслях промышленности, в частности, в телескопо- и ракетостроении.
Системы углового контроля, как правило, строятся с использованием фотоэлектрических автоколлиматоров и отражающих элементов, устанавливаемых жестко на объектах контроля.
Известны также автоколлимационная система контроля [1], где в качестве отражателя также использован тетраэдр, и трехосная система углового контроля [2], где качестве отражающего элемента используются зеркала.
Эти системы могут обеспечить довольно высокий коэффициент передачи по углу скручивания, но при больших расстояниях между контролируемым объектом и базой расстояние между автоколлиматорами, установленными на базе, становится чрезвычайно большим, что, как правило, очень трудно реализовать в условиях узкой трассы, внутри которой должна быть реализована измерительная система.
Известны устройства пространственной ориентации объектов [3, 4], в которых в качестве отражающего элемента используются блоки прямоугольных призм. Они обеспечивают высокую точность измерения угла скручивания, но их оптические схемы сложны и трудоемки.
Наиболее близким техническим решением к заявляемому изобретению является оптико-электронная система измерения угла скручивания на основе анаморфирования [5].
Эта система имеет в своем составе устанавливаемый на базе автоколлиматор, содержащий марку (диафрагму), расположенную в фокальной плоскости объектива и подсвечиваемую через конденсор источником излучения, светоделительный кубик, приемник излучения, выполненный в виде ПЗС-матрицы, информация с которой обрабатывается компьютером. На контролируемом объекте располагается контрольный элемент, состоящий из анаморфотной системы и триппель-призмы.
К недостаткам известной системы следует отнести:
- низкий коэффициент передачи по углу скручивания;
- существенное влияние поворота вокруг оси У контрольного блока, приводящего к увеличению погрешности измерения угла скручивания.
Основной задачей, на решение которой направлено предполагаемое изобретение, является повышение коэффициента передачи по углу скручивания и увеличение точности работы всей системы.
Для решения поставленной задачи предлагается система измерения угла скручивания, которая, как и прототип, содержит установленные на блоке контроля контрольный элемент и триппель-призму, объектив, диафрагму, подсвеченную через конденсор источником излучения, приемник излучения, выполненный в виде ПЗС-матрицы, и блок обработки информации.
В отличие от прототипа система снабжена дополнительной триппель-призмой, установленной на блоке контроля, при этом вершины триппель-призм расположены симметрично относительно оптической оси системы, и дополнительной диафрагмой, установленной на базе, причем диафрагмы расположены симметрично относительно оптической оси системы, а расстояния между вершинами триппель-призм и центрами диафрагм равны друг другу, кроме того, объектив проецирует центры диафрагм в вершины триппель-призм с увеличением, равным единице.
Сущность предполагаемого изобретения заключается в наличии в данной системе двух триппель-призм, установленных на контрольном элементе, и двух диафрагм, установленных на базе и проектируемых в вершины триппель-призм с помощью объектива, имеющего увеличение, равное единице, что позволяет получить коэффициент передачи по углу скручивания, равный двум.
Таким образом, совокупность указанных выше признаков предлагаемой системы измерения угла скручивания позволяет решить поставленную задачу.
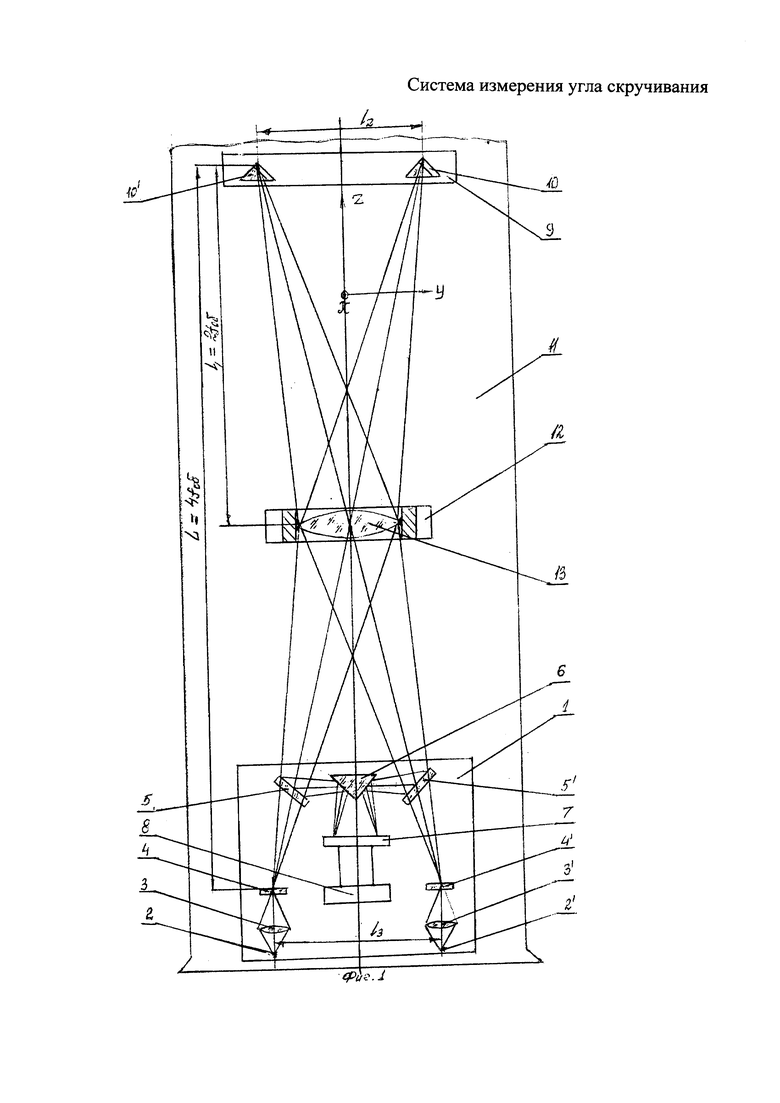
Предполагаемое изобретение иллюстрируется чертежом, где на фиг. 1 - представлена общая оптическая схема системы измерения угла скручивания.
Система измерения угла скручивания состоит из закрепляемого на базе кронштейна 1, на котором установлены два источника излучения 2 и 2', два конденсор 3 и 3', две диафрагмы 4 и 4', две светоделительные пластины 5 и 5', зеркальная призма 6, приемник излучения, выполненный в виде ПЗС-матрицы 7 и блок обработки информации 8, закрепляемого на контролируемом объекте кронштейна 9 с установленными на нем двумя триппель-призмами 10 и 10' и закрепленного на изделии 11 кронштейна 12 с установленным на нем объективом 13. При этом расстояние между вершинами триппель-призм 10 и 10' и диафрагм 4 и 4' вдоль оптической оси системы (Z) равно четырем фокусным расстояниям объектива 13 (L=4fоб), а сам объектив 13 находится между ними (L1=2fоб).
Вершины триппель-призм 10 и 10' расположены симметрично относительно оптической оси (Z) системы измерения угла скручивания. Аналогично расположены центры диафрагм 4 и 4'.
Так, например, если L=10 м, то fоб.=2,5 м и L1=5 м. Расстояния вдоль оси У L2 и L3 между вершинами триппель-призмам 10 и 10' и центрами диафрагм 4 и 4' соответственно друг другу и выбираются из необходимости обеспечить требуемую точность работы системы измерения угла скручивания.
Работа системы измерения угла скручивания осуществляется следующим образом.
Источники излучения 2 и 2' с помощью конденсоров 3 и 3' проектируются в плоскость диафрагм 4 и 4' соответственно. Диафрагм 4 и 4' представляют собой круглые отверстия диаметром 0,2-0,5 мм и находятся на двойном фокусном расстоянии от объектива 13. Излучение от диафрагм 4 и 4' проходит через светоделительные пластины 5 и 5' соответственно и попадает на объектив 13, который с увеличением, равным единице, проецирует их в вершины триппель-призм 10 и 10' соответственно. Отраженное от триппель-призм 10 и 10' излучение снова попадает на объектив 13, который с помощью полупрозрачных светоделительных пластин 5 и 5' и зеркальной призмы 6 строит два изображения диафрагм 4 и 4' в плоскости ПЗС-матрицы 7. Информация с приемника излучения, выполненного в виде ПЗС-матрицы 7, поступает в блок обработки информации 8, где и осуществляется вычисление величины угла скручивания контролируемого объекта.
Так, например, если расстояние между вершинами триппель-призм 10 и 10' l2=l3=100 мм, то при скручивании контролируемого объекта вокруг оси Z на угол ϕ=1" их вершины сместятся друг относительно друга вдоль оси X на величину δ1:
δ1=l2⋅ϕ=1⋅105⋅1⋅10-6=0,5 мкм, где l2 - в микрометрах, а ϕ - в радианах.
При этом изображения диафрагм 4 и 4' сместятся на ПЗС-матрице 7 вдоль оси X друг относительно друга на удвоенную величину δ2=1 мкм, что при определенных размерах пикселя ПЗС-матрицы и будет определено с высокой точностью.
В блоке обработки информации 8 вычисление угла скручивания ϕ осуществляется по формуле: 
Необходимо отметить, что при поворотах контролируемого объекта вокруг осей X и У изображения диафрагм 4 и 4' на ПЗС-матрице будут смещаться вдоль осей У и X на одинаковую величину и поэтому не будет оказывать влияния на определение угла скручивания.
Никакого существенного влияния на точность измерения скручивания не будет оказывать и возможные смещения и наклоны объектива 13.
Таким образом, в предлагаемой системе измерения угла скручивания достигается высокий коэффициент передачи по углу скручивания, равный двум, а поворот контролируемого объекта вокруг осей X и У не влияют на точность измерения угла скручивания.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. США, патент на изобретение №4721386, МПК: G01В 11/26, 1988 г.
2. РФ, патент на полезную модель №167011, МПК: G01В 11/26, 2016 г.
3. РФ, патент на изобретение №2182311, МПК: G01В 11/26, 2001 г.
4. РФ, патент на изобретение №2408840, МПК: G01В 11/26, 2011 г.
5. Коняхин И.А., Мерсон А.Д. Оптико-электронная система измерения угла скручивания на основе анаморфирования. Известия вузов. Приборостроение. 2008. Т. 51 №9 с. 10-14. – прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛИЗАТОР ПЛОТНОСТНЫХ НЕОДНОРОДНОСТЕЙ СРЕДЫ | 2007 |
|
RU2344409C1 |
| ТРЁХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2017 |
|
RU2650432C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ УГЛОМЕРНОГО ПОВОРОТНОГО СТОЛА | 2021 |
|
RU2779239C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2237865C2 |
Изобретение предназначено для определения угла скручивания контролируемого объекта относительно некоторой базы в различных отраслях промышленности, в частности в телескопо- и ракетостроении. Система измерения угла скручивания содержит установленные на блоке контроля контрольный элемент и триппель-призму, объектив, диафрагму, подсвеченную через конденсор источником излучения, приемник излучения, выполненный в виде ПЗС-матрицы, и блок обработки информации. При этом система снабжена дополнительной триппель-призмой, установленной на блоке контроля, при этом вершины триппель-призм расположены симметрично относительно оптической оси системы, и дополнительной диафрагмой, установленной на базе, причем диафрагмы расположены симметрично относительно оптической оси системы, а расстояния между вершинами триппель-призм и центрами диафрагм равны друг другу, кроме того, объектив проецирует центры диафрагм в вершины триппель-призм с увеличением, равным единице. Технический результат - повышение коэффициента передачи по углу скручивания и увеличение точности работы всей системы. 1 ил.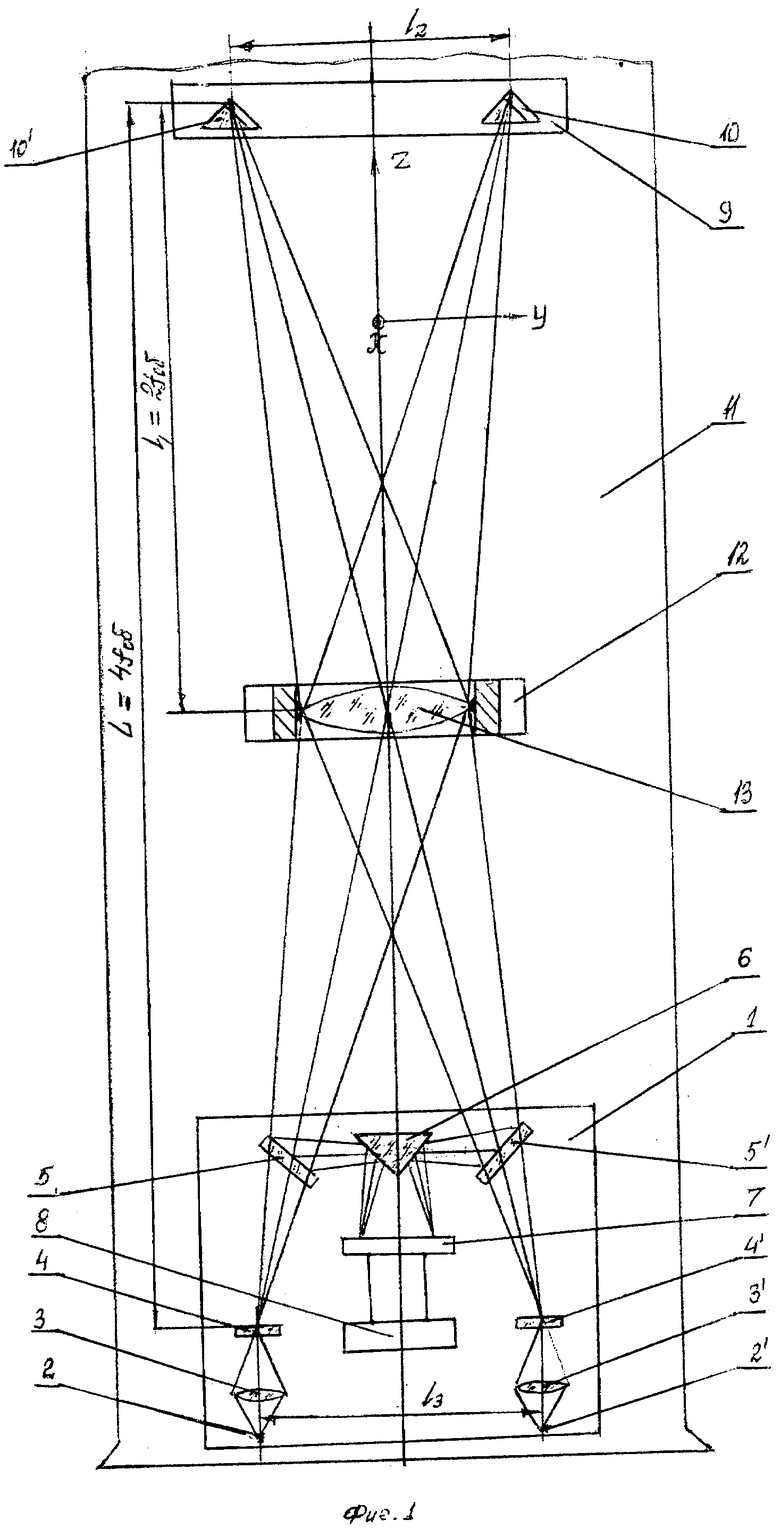
Система измерения угла скручивания, содержащая установленные на блоке контроля контрольный элемент и триппель-призму, объектив, диафрагму, подсвеченную через конденсор источником излучения, приемник излучения, выполненный в виде ПЗС-матрицы, и блок обработки информации, отличающаяся тем, что система снабжена дополнительной триппель-призмой, установленной на блоке контроля, при этом вершины триппель-призм расположены симметрично относительно оптической оси системы, и дополнительной диафрагмой, установленной на базе, причем диафрагмы расположены симметрично относительно оптической оси системы, а расстояния между вершинами триппель-призм и центрами диафрагм равны друг другу, кроме того, объектив проецирует центры диафрагм в вершины триппель-призм с увеличением, равным единице.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2011 |
|
RU2467285C1 |
| Датчик угла скручивания | 1990 |
|
SU1776989A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОВОРОТА ОБЪЕКТА | 2011 |
|
RU2471148C1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ НАПРАВЛЯЮЩИХ | 0 |
|
SU231848A1 |
| JP 63198806 A, 17.08.1988. | |||

