Изобретение относится к области измерительной техники, к измерительным устройствам, характеризующимся оптическими средствами измерений, и может быть использовано для решения широкого круга технических задач, таких как юстировка оптико-электронных систем, сборка крупногабаритных конструкций, определение параметров жесткости валов, дистанционное измерение и дистанционная передача значения угла скручивания и др.
Известно автоколлимационное устройство для передачи горизонтального направления с одного горизонта на другой [Пат. RU, №2204116, МПК G01C 15/00, приор. 14.06.2001 г.], состоящее из расположенных на оптической оси, совпадающей с осью вращения объекта, источника излучения, формирователя марки в виде матрицы круглых окон (МКО), светоделительной призмы, разделяющей осветительный и измерительный каналы, объектива, отражателя в виде призмы АР-90, расположенного на объекте, и ПЗС-матрицы, при этом марка и ПЗС-матрица установлены в фокальной плоскости объектива, а ПЗС-матрица связана с блоком обработки информации.
Источник излучения подсвечивает марку в виде МКО, излучение проходит светоделительную призму, затем параллельный пучок света после прохождения объектива попадает на установленный на объекте отражатель в виде призмы АР-90, отражается от него, проходит в обратном ходе объектив, светоделительную призму и попадает на ПЗС-матрицу. На ПЗС-матрице появляется изображение МКО, поворот которой вокруг оптической оси равен удвоенному углу поворота отражателя. Поворот изображения МКО приводит к повороту изображения марки относительно координат ПЗС-матрицы. По смещению изображения МКО в блоке обработки информации рассчитывают угол скручивания. Алгоритм расчета угла скручивания по смещению изображения марки известен.
Автоколлиматор позволяет вести измерения при существенных продольных смещениях отражателя вдоль оптической оси (изменения расстояния от фотоприемного устройства до объекта) без перефокусировки объектива и с постоянной погрешностью измерений (без учета влияния возмущений в воздушном тракте).
Однако такое устройство имеет сложную конструкцию и включает высококачественный длиннофокусный объектив с большим полем зрения, высококачественную светоделительную призму-куб и высококачественную призму АР-90.
Известно выбранное нами в качестве прототипа устройство для измерения угла скручивания [Пат. RU №2152591, МПК G01C 15/00, приор. 09.06.1999 г.], состоящее из размещенных на объекте источника излучения и марки в виде матрицы круглых окон (МКО) и расположенного соосно с маркой фотоприемного устройства, состоящего из объектива и установленной за ним ПЗС-матрицы, причем ПЗС-матрица установлена так, что изображение марки спроецировано на ПЗС-матрице, при этом оптическая ось системы совпадает с осью скручивания.
Марку в виде матрицы круглых окон (МКО) проецируют объективом в плоскость ПЗС-матрицы. В блоке обработки информации определяют координаты центров изображения окон, координаты центров изображения окон приводят к центру изображения матрицы круглых окон. При развороте МКО вокруг оси происходит разворот изображения на тот же угол, который можно определить по изменению координат окон.
Недостатком устройства является переменная погрешность измерения угла скручивания при применении объектива фотоприемного устройства с постоянным фокусным расстоянием. В случае увеличения расстояния от фотоприемного устройства до объекта погрешность измерения увеличивается пропорционально увеличению расстояния, так как погрешность измерений зависит от диаметра изображения матрицы окон на ПЗС-матрице, т.е. от масштаба изображения. Другим недостатком является сложность устройства из-за наличия системы фокусировки объектива при изменении расстояния до объекта. Объектив при перефокусировке не должен изменять аберрационные характеристики и положение оптической оси в пространстве.
Нами предложено высокоточное устройство для измерения с постоянной погрешностью угла скручивания, работающее при изменении расстояния до объекта в больших пределах и не требующее перестройки (фокусировки, изменения масштаба). Устройство просто в изготовлении и содержит стандартные унифицированные узлы.
Такой технический результат достигнут нами, когда в устройстве для измерения угла скручивания, включающем размещенный на объекте излучатель, установленный на оптической оси устройства, совпадающей с осью вращения объекта, матричный фотоприемник и связанный с ним вычислительный блок, новым является то, что на объекте по ходу луча излучателя дополнительно установлен формирователь марки, формирующий марку в виде линейной интерференционной структуры высокого контраста, локализованной в пространстве между формирователем и фотоприемником и лежащей в плоскости, перпендикулярной оптической оси, а излучатель выполнен в виде когерентного источника излучения.
Подходы к решению задачи формирования марки в виде линейной интерференционной структуры высокого контраста с заданными свойствами известны.
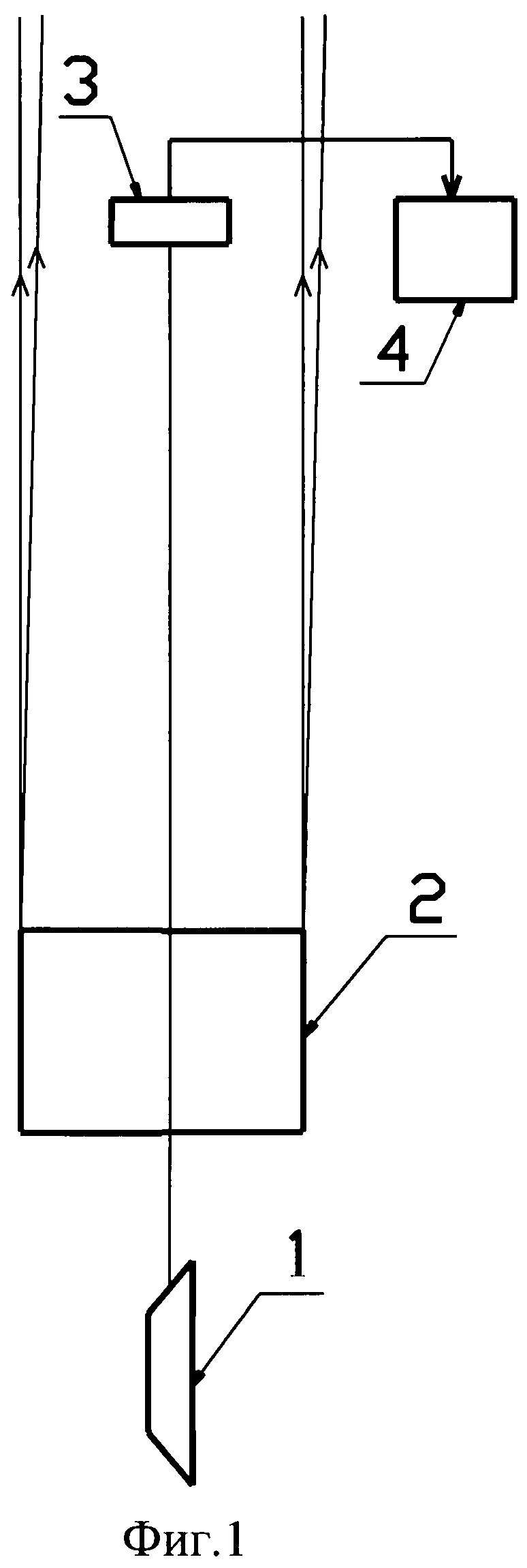
На фиг.1 приведена принципиальная схема измерителя угла скручивания, где: размещенные на вращающемся вокруг оптической оси объекте когерентный источник 1 излучения и формирователь 2 линейной интерференционной структуры, матричный фотоприемник 3, вычислительный блок 4.
На фиг.2 приведена иллюстрация примера конкретного выполнения устройства, где: размещенные на объекте, вращающемся вокруг оптической оси, источник 1 когерентного излучения и формирователь 2 линейной интерференционной структуры, матричный фотоприемник 3, вычислительный блок 4, одномодовое оптоволокно 5, разветвитель 6, объектив 7. Объектив 7, разветвитель 6 и одномодовое оптоволокно 5 образуют формирователь 2 линейной интерференционной структуры.
Устройство работает следующим образом.
Излучение когерентного источника 1 вводят в формирователь 2 линейной интерференционной структуры, на выходе которого в перпендикулярных оси плоскостях создаются интерференционные полосы, которые изображаются на матричном фотоприемнике 3.
Формирователем 2 линейной интерференционной структуры (марки) служит устройство, на выходе которого интерферируют два плоских волновых фронта, наклоненных друг относительно друга на определенный угол, от которого зависит частота интерференционных полос. При пространственной и временной когерентности источника излучения интерференционная структура высокого контраста будет существовать на любой дистанции в зоне пересечения апертур интерферирующих фронтов.
Как было сказано выше, подходы к решению задачи формирования марки в виде линейной интерференционной структуры высокого контраста с заданными свойствами известны и могут быть выполнены, например, при помощи волоконных, голограммных, поляризационных и других оптических элементов.
Принципиальным является то, что изображение интерференционных полос на матричном фотоприемнике 3 при переменном расстоянии до объекта получается без применения фокусирующего объектива. Это исключает дополнительную погрешность измерений, связанную с аберрациями и дисторсией объектива с большим полем зрения, определяемым форматом матрицы, а также наклоном оптической оси при его перефокусировке. Диапазон рабочих расстояний до объекта зависит от диаметра формирователя и частоты интерференционных полос, формата приемника и может быть рассчитан для выбранных параметров системы.
Благодаря тому, что формирователь размещен на объекте и меняет свое положение вместе с ним, угол поворота изображения полос будет соответствовать углу поворота объекта с установленным на нем блоком формирования линейной интерференционной структуры. В вычислительном блоке 4 происходит расчет угла поворота изображения интерференционных полос относительно координат матричного фотоприемника 3. Алгоритм расчета угла поворота (скручивания) известен.
Пример конкретного исполнения
По схеме, приведенной на фиг.1, создан макет устройства для измерения угла скручивания (фиг.2). Из соображений минимизации когерентных шумов в качестве формирователя интерференционной структуры выбрана схема с волоконным источником света, дающим практически идеальный сферический фронт. В качестве когерентного источника света был выбран полупроводниковый лазер (λ=0,635 мкм) с волоконным выводом, в качестве фотоприемника - цифровая ПЗС-матрица формата 1280×1024 элементов с размером элемента 5 мкм. В качестве вычислительного блока 4 используют компьютер типа Пентиум-4.
Излучение полупроводникового лазера 1 с одномодовым световодом на выходе делится на два канала при помощи разветвителя 6. Торцы выходных одномодовых световодов 5 являются точечными источниками, которые расположены в фокальной плоскости объектива 7 на определенном расстоянии друг от друга. Разветвитель 6, одномодовые световоды 5 и объектив 7 образуют формирователь линейной интерференционной структуры в сечении, перпендикулярном оси объектива. Каждый точечный источник (торец световодов 5), помещенный в фокальную плоскость объектива 7, дает на выходе плоский волновой фронт. Частота интерференционной структуры, получаемой при интерференции двух плоских волновых фронтов, вышедших из объектива под углом друг к другу, зависит от расстояния между точечными источниками (торцами световодов) и фокусного расстояния объектива, и в данном случае составляет 3.1 мм-1 (угол 7 угл. мин).
Интерференционная структура локализована во всех плоскостях между объективом 7 и фотоприемником 3 в зоне пересечения плоских волновых фронтов. Зона пересечения фронтов определяет максимальную дистанцию работы устройства. В данном случае при световом диаметре объектива, равном 30 мм, максимальная дистанция составляет порядка 4 м (с запасом по поперечному смещению матричного фотоприемника).
Начальный угол ориентации изображения интерференционных полос на ПЗС-матрице устанавливается близким к нулю градусов относительно столбцов матрицы.
Лазеры с оптоволоконным выводом и разветвители являются серийно выпускаемыми изделиями. Требования к объективу 7 формирователя значительно ниже, чем к объективу фотоприемного устройства прототипа. Объектив формирователя, например, по сравнению с объективом прототипа, имеет значительно меньшее линейное поле зрения (0,25 мм и 10 мм), меньшее фокусное расстояние (100 мм и 500 мм при дистанции 4 м), у него отсутствуют требования к наличию фокусировочной подвижки.
Задачу изменения масштаба изображения при переменном расстоянии до объекта для сохранения постоянной погрешности измерений в устройствах, таких как прототип, можно было бы решить, применяя высококачественный объектив с переменным фокусным расстоянием. Однако к нему существуют высокие технические требования. Объектив должен иметь большое поле зрения, определяемое используемой матрицей, маленькие аберрации, малую дисторсию, сохранение маленьких аберраций и дисторсии при перефокусировке и изменении фокусного расстояния, сохранение направления оптической оси при перефокусировке и изменении фокусного расстояния. Стоимость такого объектива несоизмеримо выше суммарной стоимости остальных элементов устройства.
Диапазон измерений устройства составил ±6 угл. град, погрешность измерения угла скручивания в лабораторных условиях составила 4 угл. сек при изменении дистанции до объекта от 0,1 м до 4 м.
В настоящее время ведется конструкторская проработка системы. Предполагается использование предложенного технического решения в системе дистанционной передачи угловой координаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронное устройство для контроля положения объекта | 1985 |
|
SU1307230A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА | 2010 |
|
RU2447410C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| УСТРОЙСТВО КОНТРОЛЯ ПОЛОЖЕНИЯ ОБЪЕКТА НАНО- И СУБНАНОМЕТРОВОЙ ТОЧНОСТИ | 2012 |
|
RU2502951C1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОГО АНАЛИЗА ВЗВЕШЕННЫХ ЧАСТИЦ | 2014 |
|
RU2558279C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2474787C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СИСТЕМ ПОИСКА ПОГРУЖЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388013C2 |
| СПОСОБ ВИДЕНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ ЛАЗЕРНОЙ ПОДСВЕТКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2207591C1 |
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2019 |
|
RU2705177C1 |
Изобретение может быть использовано для юстировки оптико-электронных систем, сборки крупногабаритных конструкций, определения параметров жесткости валов, дистанционного измерения и передачи значения угла скручивания и др. Устройство включает размещенный на объекте излучатель, установленный на оптической оси устройства, совпадающей с осью вращения объекта, матричный фотоприемник и связанный с ним вычислительный блок. На объекте по ходу луча излучателя дополнительно установлен формирователь марки, формирующий марку в виде линейной интерференционной структуры высокого контраста, локализованной в пространстве между формирователем и фотоприемником и лежащей в плоскости, перпендикулярной оптической оси. Излучатель выполнен в виде когерентного источника излучения. Технический результат - обеспечение высокоточного измерения с постоянной погрешностью при изменении расстояния до объекта в больших пределах без перестройки (фокусировки, изменения масштаба), а также простота изготовления и использование стандартных унифицированных узлов. 2 ил.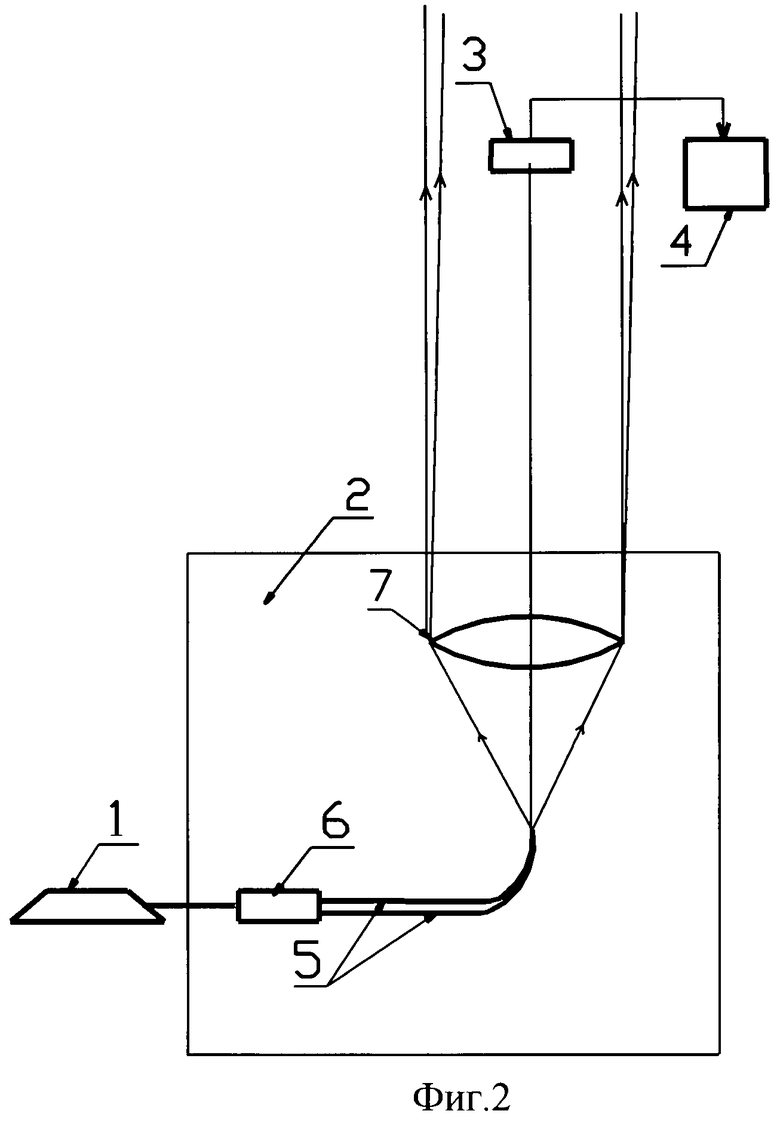
Устройство для измерения угла скручивания, включающее размещенный на объекте излучатель, установленный на оптической оси устройства, совпадающей с осью вращения объекта, матричный фотоприемник и связанный с ним вычислительный блок, отличающееся тем, что на объекте по ходу луча излучателя дополнительно установлен формирователь марки, формирующий марку в виде линейной интерференционной структуры высокого контраста, локализованной в пространстве между формирователем и фотоприемником и лежащей в плоскости, перпендикулярной оптической оси, а излучатель выполнен в виде когерентного источника излучения.
| УСТРОЙСТВО ПЕРЕДАЧИ ГОРИЗОНТАЛЬНОГО НАПРАВЛЕНИЯ С ОДНОГО ГОРИЗОНТА НА ДРУГОЙ | 1999 |
|
RU2152591C1 |
| Устройство для измерения углов скручивания | 1977 |
|
SU1019235A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА НЕСКОЛЬКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2075727C1 |
| US 3955083 А, 04.05.1976 | |||
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |

