Изобретение относится к области метрологии и приборостроения и может быть использовано в испытаниях угломерных поворотных столов (ПС).
Известна система измерения угла скручивания (патент RU 2663297 С1). Изобретение предназначено для определения угла скручивания контролируемого объекта относительно некоторой базы в различных отраслях промышленности, в частности в телескопо- и ракетостроении. Система измерения угла скручивания содержит установленные на блоке контроля контрольный элемент и триппель-призму, объектив, диафрагму, подсвеченную через конденсор источником излучения, приемник излучения, выполненный в виде ПЗС-матрицы, и блок обработки информации. При этом система снабжена дополнительной триппель-призмой, установленной на блоке контроля, при этом вершины триппель-призм расположены симметрично относительно оптической оси системы, и дополнительной диафрагмой, установленной на базе, причем диафрагмы расположены симметрично относительно оптической оси системы, а расстояния между вершинами триппель-призм и центрами диафрагм равны друг другу, кроме того, объектив проецирует центры диафрагм в вершины триппель-призм с увеличением, равным единице. Недостатком аналога является его применимость только для для крупногабаритных объектов. Для высокоточных поворотных столов приборостроения схема трудно реализуема.
За прототип принят способ измерений в патенте «Устройство базирования многогранных призм» (патент RU 2711610 С1). Прототип является проверкой угломерных приборов и, в частности, углозадающих поворотных столов. В проверке используются автоколлиматор, многогранная призма и массивное основание. Для реализации измерений необходимо соосно и без перекосов установить на платформе образцовую многогранную призму ГОСТ 8.016-8/1. Автоколлиматор установить на общем массивном основании совместно с проверяемым прибором. Проверка осуществляется путем сравнения горизонтальных углов поворота платформы испытуемого (проверяемого) стола с углами образцовой многогранной призмы. Недостатком прототипа является то, что он определяет величину погрешности, но не выявляет в полном объеме составляющие систематической погрешности и причины их возникновения, характерные для угломерных ПС, что затрудняет анализ модели погрешности и поиск путей снижения составляющих погрешности.
Задачей изобретения является определение погрешности поворотного стола, обусловленной деформацией кручения корпуса стола.
Указанная задача выполняется в способе определения погрешности угломерного поворотного стола (ПС), основанном на сравнении горизонтальных плоских углов поворота ПС с углами образцовой многогранной призмы (МП), в котором устанавливают ПС и автоколлиматор (АК) на массивное основание; на ось поворотного стола устанавливают МП в устройстве базирования; осуществляют юстирование призмы, согласно изобретению, на корпус ПС устанавливают зеркало контроля (ЗК), выставляют его перпендикулярно оптической оси АК, минимизируя показания АК, и закрепляют ЗК; выбирают первую грань МП и выполняют два цикла измерений, в каждом цикле выполняют поворот в положительном направлении, наводят АК на первую грань МП, снимают показания углов коллиматора с призмы и зеркала, и с датчика угла ПС, выполняют поворот в отрицательном направлении, наводят АК на первую грань МП, аналогично снимают показания, получают разности углов призмы с датчика угла и коллиматора, и разности углов зеркала с коллиматора, деформацию корпуса ПС определяют путем сравнения полученных разностей.
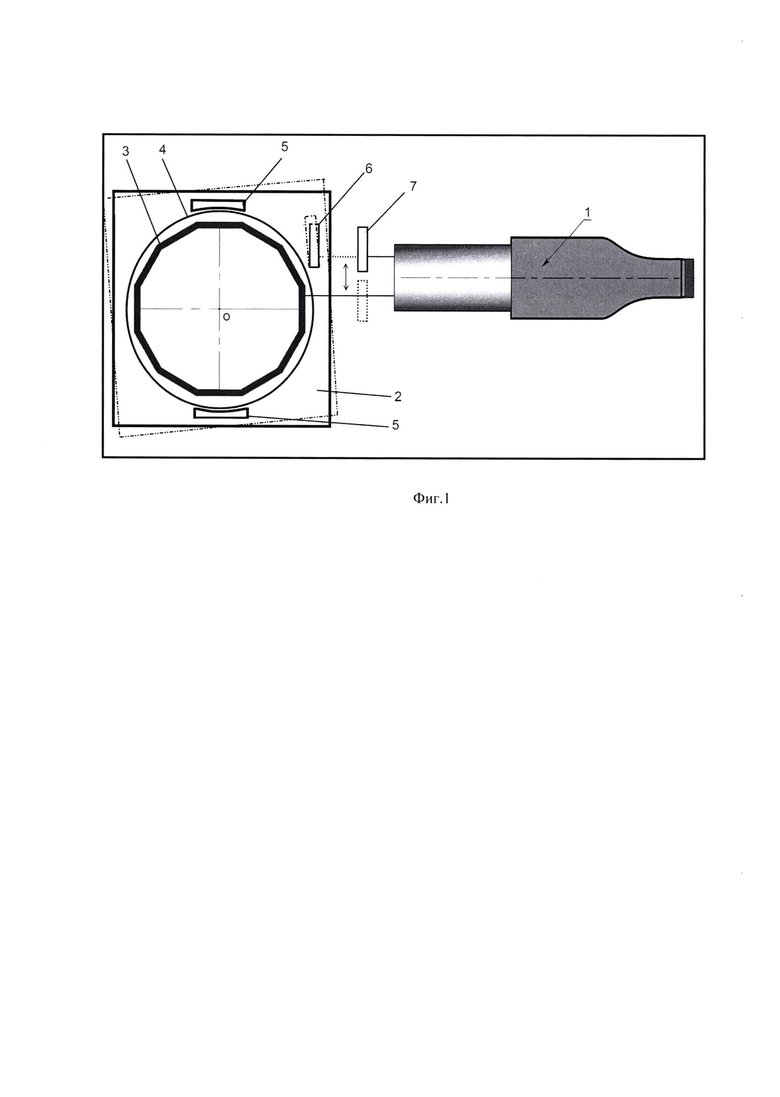
На фиг. 1 показано устройство проверки ПС.
АК (1) и ПС (2) установлены на общем массивном основании, ось вала ПС перпендикулярна плоскости чертежа (точка О). На валу платформы стола (вал ПС) закрепляют МП (3) в устройстве базирования и осуществляют юстирование призмы.
ПС имеет типичное устройство, в него входит полноповоротный датчик угла и привод. Ротор (4) полноповоротного датчика угла прикреплен на валу ПС, а статор (5) - к корпусу ПС. На корпусе ПС, в месте прикрепления статора полноповоротного датчика угла на время проверки устанавливают новый элемент устройства проверки - зеркало контроля (ЗК) (6), плоскость которого вертикальна. АК наведен одновременно на зеркала МП и ЗК. Шторка (7) позволяет закрыть любое из них, с другого зеркала АК может снимать отсчеты.
Проводят подготовку проверки. Согласуют шкалу АК со шкалой ПС в одном (положительном) направлении возрастания углов при повороте вала ПС.Устанавливают вал ПС в исходное положение проверки, пусть это будет угол 330° круговой шкалы полноповоротного датчика угла ПС. Устанавливают шторку в положение, при котором закрыто ЗК, и поворотом трубы АК направляют АК на первую грань МП. При этом обеспечивают на отсчетном устройстве АК минимальное значение горизонтального угла. Фиксируют АК на плите испытаний. Устанавливают шторку в положение, при котором закрыто зеркало МП, раскрепляют и регулируют угловое положение ЗК до достижения минимума горизонтального угла на отсчетном устройстве АК, и закрепляют ЗК.
Для первой грани МП выполняют два цикла измерений i=1, 2. В первом цикле i=1:
- устанавливают грань МП в исходное положение (например, 330° по датчику угла ПС);
- выполняют поворот вала ПС в положительном направлении, наводят АК на первую грань МП и снимают показание угла α1+ датчика угла ПС;
- снимают показание угла β1+ с АК на грани МП;
- снимают показание угла γ1+ с АК на ЗК, затем закрывают шторкой ЗК;
- вычисляют разность углов (α1+-β1+);
- выполняют поворот вала ПС в отрицательном направлении, наводят АК на грань МП и производят аналогичные измерения углов α1-, β1- и γ1-;
- вычисляют разность углов (α1--β1-) и разность ΔΓ±1=γ1+-γ1-.
Выполняют аналогично второй цикл измерений i=2 и получают результаты
измерений α2+, β2+и γ2+; α2-, β2- и γ2-; и вычислений α2+-β2+, α2--β2-, ΔΓ±2=γ2+-γ2-
Затем вычисляют изменение разности углов в первом и втором циклах, вызванное сменой направления поворотов по показаниям МП ΔΦ±i - (αi+-βi+) - (α1--βi-);
Определяют изменение разности углов в первом и втором циклах, независящее от смены направления поворотов:
- для положительного направления ΔΦ+=(α1+-β1+)-(α2+-β2+);
- для отрицательного направления ΔΦ-=(α1--β1-)-(α2--β2-).
Выполняют перечисленные измерения и предварительную выставку ЗК для остальных граней призмы. Если хотя бы на одной грани значения ΔΦ±i и ΔΓ±i по величине превышают значения ΔΦ+и ΔΦ-, делают вывод о наличии погрешности, обусловленной деформацией кручения корпуса; если на всех гранях значения ΔΦ±i и ΔΓ±i не превышают значения ΔΦ+и ΔΦ-, делают вывод об отсутствии погрешности, обусловленной деформацией кручения корпуса.
Для поворотных столов с приводом, имеющим червячный редуктор, это объясняется следующим образом. На корпус ПС действует реактивный момент (пара сил) червячного привода. Одна из них - сила (Fпр) является осевой силой червяка, равной приложенной к червячному колесу (движущей) силе. Другая сила пары (-Fпр) - сила опоры червячного колеса, передающаяся к корпусу ПС. К нему приложен также момент трения подшипников вала ПС (Мтр). Изменение направления моментов при смене направления разворотов вала ПС приводит к малой величине смещения верхней части корпуса ПС (на рис. 1 а показано условно штриховой линией) относительно нижней, прикрепленной к плите, что регистрируется на ЗК. На этот же угол поворачивается статор полноповоротного датчика угла, размещенного на выходе вала ПС из корпуса ПС. Прецизионный ПС, имеющий высокую дискретность (0,01''), отрабатывает этот угол поворотом вала при позиционировании углов. МП поворачивается с валом в ту же сторону, в которую сместился корпус ПС. Показания ПС не изменяются, а в отсчетах АК на гранях МП, появляется изменение ΔΦ±.
В высокоточных ПС достаточно самых малых смещений корпуса для возникновения существенной погрешности сравнения с углами МП. Угловому смещению 0,3'' корпуса ПС при радиусе 100 мм, на котором установлены элементы статора 6, соответствуют линейные смещения величиной 0,15 мкм, косвенно обнаруживаемые на зеркале ЗК. Необходимой мерой является рациональная компоновка силовых узлов ПС, при которой прикладываемые ими моменты сведены в одну плоскость и минимально смещают корпус. Комплекс мер по снижению указанной погрешности при разработке ПС включает в себя расчет конструкции ПС и ее доводку по результатам конструкторских испытаний, проводимых с применением описанного способа.
Таким образом, заявлен способ определения погрешности угломерного поворотного стола (ПС), основанный на сравнении горизонтальных плоских углов поворота ПС с углами образцовой многогранной призмы (МП), в котором устанавливают ПС и автоколлиматор (АК) на массивное основание; на ось поворотного стола устанавливают МП в устройстве базирования; осуществляют юстирование призмы. Отличительная особенность способа заключается в том, что на корпус ПС устанавливают зеркало контроля (ЗК), выставляют его перпендикулярно оптической оси АК, минимизируя показания АК, и закрепляют ЗК; выбирают первую грань МП и выполняют два цикла измерений, в каждом цикле выполняют поворот в положительном направлении, наводят АК на первую грань МП, снимают показания: угла αi+ с датчика угла ПС, угла βi+ с АК на грани МП и угла γi+ с АК на ЗК; вычисляют разность углов αi+-βi+; выполняют поворот вала ПС в отрицательном направлении, наводят АК на первую грань МП, снимают показания: угла αi- с датчика угла ПС, угла βi- с АК на грани МП и угла γi- с АК на ЗК; вычисляют разность углов αi--βi-, где i - номер цикла; выполняют вычисления величины разности углов Г*i=γi+-γi- и величин изменения разностей углов:
ΔΦ±i=(αi+-βi+) - (αi--βi-),
ΔΦ+=(α1+-β1+)-(α2+-β2+),
ΔФ-=(α1--β1-)-(α2--β2-);
выполняют перечисленные измерения и вычисления для остальных граней МП, если хотя бы на одной грани МП значения ΔΦ±i и Г±i по величине превышают значения ΔΦ+и ΔΦ-, делают вывод о наличии погрешности, обусловленной деформацией кручения корпуса ПС; если на всех гранях МП значения ΔΦ±i и Γ±i не превышают значения ΔΦ+ и ΔΦ-, делают вывод об отсутствии погрешности, обусловленной деформацией кручения корпуса ПС.
Техническим результатом изобретения является определение погрешности поворотного стола, обусловленной деформацией кручения корпуса стола.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ ПОГРЕШНОСТЕЙ КРУГОВОЙ ШКАЛЫ ПОВОРОТНОГО СТОЛА | 2022 |
|
RU2790074C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ОХЛАЖДАЮЩИХ СЕКЦИЙ ТУННЕЛЬНОЙ ПЕЧИ ДЛЯ ПЛОСКОГО СТЕКЛА | 2007 |
|
RU2417960C2 |
| УСТРОЙСТВО БАЗИРОВАНИЯ МНОГОГРАННЫХ ПРИЗМ | 2019 |
|
RU2711610C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| СПОСОБ ВНЕШНЕЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2005 |
|
RU2286598C1 |
| СПОСОБ ПЕРЕДАЧИ ЕДИНИЦЫ ПЛОСКОГО УГЛА ВЫСОКОТОЧНЫМ ГЕОДЕЗИЧЕСКИМ УГЛОМЕРНЫМ ПРИБОРАМ | 2024 |
|
RU2831792C1 |
| Способ определения угловых ошибок поворотного гидропривода | 2023 |
|
RU2817574C1 |
| СПОСОБ ПЕРЕДАЧИ ЕДИНИЦЫ ПЛОСКОГО УГЛА ГЕОДЕЗИЧЕСКИМ УГЛОМЕРНЫМ ПРИБОРАМ | 2020 |
|
RU2768243C2 |
| СПОСОБ БАЗИРОВАНИЯ И КРЕПЛЕНИЯ СПУТНИКА И СТАНОК С ПЛАВАЮЩЕЙ СИСТЕМОЙ БАЗИРОВАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2157307C2 |
| Способ коррекции углов визирования на точку | 2020 |
|
RU2758860C1 |
Изобретение относится к области метрологии и приборостроения и может быть использовано в испытаниях угломерных поворотных столов (ПС). В способе определения погрешности угломерного поворотного стола (ПС), основанный на сравнении горизонтальных плоских углов поворота ПС с углами образцовой многогранной призмы (МП), в котором устанавливают ПС и автоколлиматор (АК) на массивное основание; на ось поворотного стола устанавливают МП в устройстве базирования; осуществляют юстирование призмы, согласно изобретению, на корпус ПС устанавливают зеркало контроля (ЗК), выставляют его перпендикулярно оптической оси АК, минимизируя показания АК, и закрепляют ЗК; выбирают первую грань МП и выполняют два цикла измерений, в каждом цикле выполняют поворот в положительном направлении, наводят АК на первую грань МП, снимают показания углов коллиматора с призмы и зеркала, и с датчика угла ПС, выполняют поворот в отрицательном направлении, наводят АК на первую грань МП, аналогично снимают показания, получают разности углов призмы с датчика угла и коллиматора, и разности углов зеркала с коллиматора, деформацию корпуса ПС определяют путем сравнения полученных разностей. Техническим результатом является определение погрешности поворотного стола, обусловленной деформацией кручения корпуса стола. 1 ил.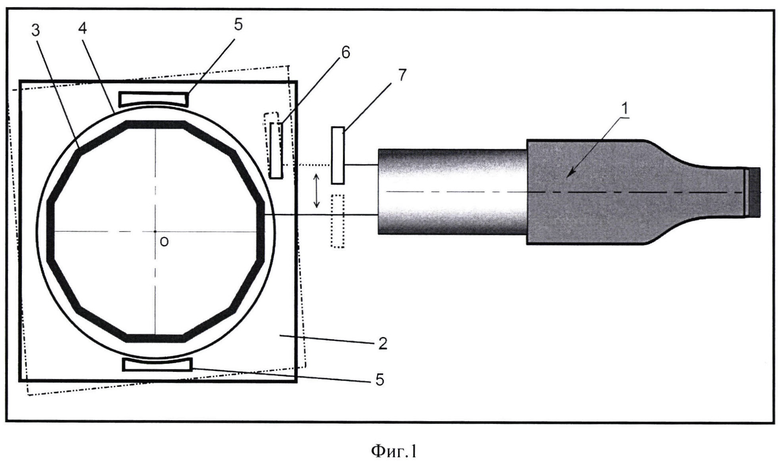
Способ определения погрешности угломерного поворотного стола (ПС), основанный на сравнении горизонтальных плоских углов поворота ПС с углами образцовой многогранной призмы (МП), в котором устанавливают ПС и автоколлиматор (АК) на массивное основание; на ось поворотного стола устанавливают МП в устройстве базирования; осуществляют юстирование призмы; отличающийся тем, что на корпус ПС устанавливают зеркало контроля (ЗК), выставляют его перпендикулярно оптической оси АК, минимизируя показания АК, и закрепляют ЗК; выбирают первую грань МП и выполняют два цикла измерений, в каждом цикле выполняют поворот в положительном направлении, наводят АК на первую грань МП, снимают показания: угла αi+ с датчика угла ПС, угла βi+с АК на грани МП и угла γi+ с АК на ЗК; вычисляют разность углов αi+-βi+; выполняют поворот вала ПС в отрицательном направлении, наводят АК на первую грань МП, снимают показания: угла αi- с датчика угла ПС, угла βi- с АК на грани МП и угла γi- с АК на ЗК; вычисляют разность углов αi--βi-, где i - номер цикла; выполняют вычисления величины разности углов Г±=γi+-γi- и величин изменения разностей углов:
ΔФ±i=(αi+-βi+)-(αi--βi-),
ΔФ+=(α1+-β1+)-(α2+-β2+),
ΔФ -=(α1--β1-)-(α2-β2-);
выполняют перечисленные измерения и вычисления для остальных граней МП, если хотя бы на одной грани МП значения ΔФ±i и Г±i по величине превышают значения ΔФ+ и ΔФ-, делают вывод о наличии погрешности, обусловленной деформацией кручения корпуса ПС; если на всех гранях МП значения ΔФ±i и Г±i не превышают значения ΔФ+и ΔФ-, делают вывод об отсутствии погрешности, обусловленной деформацией кручения корпуса ПС.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| Устройство для аттестации пентагонального блока | 1987 |
|
SU1456775A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| US 10495452 B2, 03.12.2019 | |||
| JP 60113103 A, 19.06.1985 | |||
| CN 111595271 A, 28.08.2020. | |||

