Область техники, к которой относится изобретение
Изобретение относится к навигационной системе автотранспортного средства и, в частности, к способу вероятностного определения текущей полосы движения и формирования рекомендаций но своевременному перестроению при следовании по заданному маршруту.
Уровень техники
В настоящее время существует большое количество навигационных программ, предназначенных для использования в автотранспортных средствах и служащих в качестве помощника при выборе маршрута движения и следовании по нему. Подобные навигационные программы установлены на мобильных пользовательских устройствах (планшетах и смартфонах), автономных устройствах, а также во встроенные непосредственно в автомобиль компьютеры. Наиболее популярными из подобных программ являются Яндекс. Навигатор (от компании «Яндекс»), Google Maps (от компания «Google»), Навител (от компании «Navitel»), СитиГИД (от компании «МИТ») и другие. Как правило, данные программы имеют схожие функциональные возможности - построение маршрутов из одной точки в другую и ведение по заданному маршруту, отображение текущей скорости, расчет времени прибытия в конечную точку. При этом, маршрут представляет собой совокупность связанных между собой крупных ключевых точек дорожного графа (перекрестки, примыкания дорог, многоуровневые развязки и т.д).
Расчет текущего положения на маршруте основывается на получении координат транспортного средства от глобальных спутниковых систем определения местоположения: GPS (США), ГЛОНАСС (РФ), Галлилео (ЕС). Навигационные устройства, установленные в автотранспортные средства, имеют аппаратную поддержку одной или одновременно нескольких подобных систем. Наиболее распространенными в использовании являются устройства, поддерживающие системы навигации GPS или GPS и ГЛОНАСС одновременно.
Следует заметить, что в настоящее время все навигационные программы «привязывают» полученные координаты двигающегося транспортного средства к единому сегменту (ребру), связывающему узлы дорожного графа. Визуализация маршрута и текущего местоположения автомобиля на экране навигационной программы представлена, как правило, в виде широкой полосы и крупного маркера соответственно. При этом, для лучшего визуального восприятия, ширина полосы соответствует ширине всей или почти всей проезжей части. Другими словами, отсутствует информация о движение по той или иной полосе. Эта проблема особенно актуальна в крупных мегаполисах, где существует большое количество многополосных дорог и сложных транспортных развязок. Многие программы для навигации иногда вводят в заблуждение или дают неполную и несвоевременную информацию, что зачастую приводит к невозможности осуществления необходимого маневра (поворота, разворота и т.д.) и ухода с маршрута. Следствием ухода с заданного маршрута является необходимость его перестроения, что влечет за собой существенную потерю времени и увеличение пробега транспортного средства.
Программа Google Maps имеет возможность отображения информации о полосах перед некоторыми перекрестками. Программа в графическом виде (в виде знака) отображает полосу, которую необходимо занять для выполнения маневра. Однако, при этом, она не предоставляет и никак не учитывает информацию о том, какую именно полосу занимает транспортное средство в текущий момент времени.
Помимо вышесказанного, немаловажным фактором для успешного и безопасного движения является своевременное получение информации о проводимых на маршруте движения ремонтных работах, случившихся дорожно-транспортных происшествиях и других ситуациях, так или иначе влияющих на принятие водителем различных решений. Некоторые существующие программы позволяют вручную установить предупреждающее других водителей сообщение, указав приблизительное место. Однако, используемая при этом градация полос (которых, как правило, три - «левый ряд», «средний ряд», «правый ряд») не всегда является достаточной. На дорогах с более чем тремя полосами термин "средний ряд" может указывать сразу на несколько соседних полос движения. Этот факт не позволяет водителю своевременно принять решение о необходимости перестроения в соседнюю полосу.
Альтернативный способ определения положения транспортного средства относительно линий дорожной разметки описан в патенте РФ на изобретение RU 2422772 С1, которое основано на использовании иных физических принципов - измерении расстояния от линии дорожной разметки до транспортного средства и угла отклонения продольной оси транспортного средства относительно линий дорожной разметки с использованием оптико-локационных блоков. Данный способ может работать в ограниченном количестве случаев, например, когда разметка присутствует и она видна визуальна. В зимний период времени, когда дороги в большинстве регионов покрыты снегом, данный способ работать не будет.
Другим, близким к настоящей заявке, патентом является RU 2404409 С1. Однако, следует отметить, что он описывает только лишь устройство отображения карты для транспортного средства и предоставление способа визуального отображения полос движения на карте в навигационном устройстве, не раскрывая при этом непосредственно сам принцип формирования "цифровой разметки".
Сущность изобретения
Данное изобретение призвано решить перечисленные выше проблемы, связанные с определением и визуализацией количества полос на проезжей части, текущей полосы, на которой находится транспортное средство, а также рекомендаций, направленных на своевременное перестроение в другие полосы. В основе предложенного решения лежат процессы сбора, хранения и обработки данных, соответствующих большому количеству наблюдений от множества транспортных средств с установленным в них навигационным устройством.
Рассмотрим данные процессы более подробно. Как определение количества полос, текущей занимаемой полосы, так и рекомендаций по ее смене вычисляются на основе набора данных (наблюдений), полученных ранее от других транспортных средств и обработанных с использованием совокупности математических алгоритмов. При этом, каждый отдельный участок (сегмент) дорожно-уличной сети характеризуется своим набором значений математической модели, которую можно назвать «цифровой разметкой». Эта математическая модель описывает реальное расположение полос движения на проезжей части данного участка с точностью, необходимой для адекватного вычисления занимаемой автомобилем полосы.
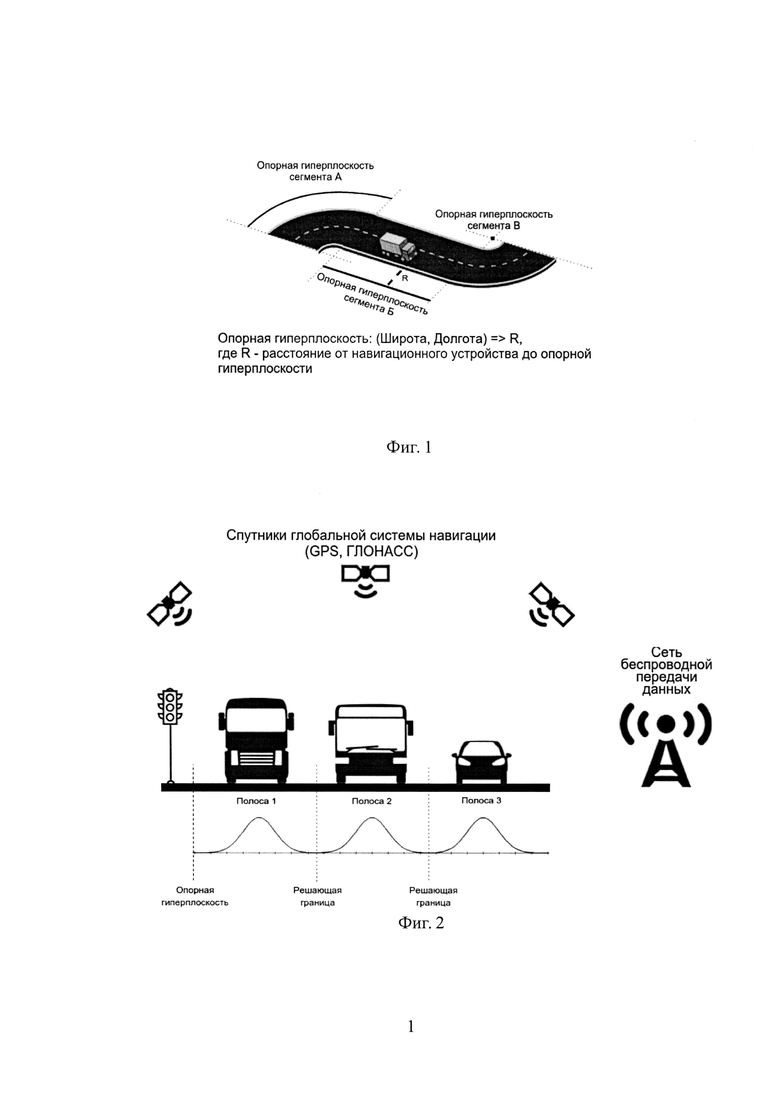
Ключевой идеей предлагаемого способа является преобразование координат местоположения транспортного средства, которые представляют собой пару значений «широта-долгота», в одно значение - расстояние до опорной гиперплоскости, соответствующей данному сегменту дороги. Опорной гиперплоскостью в данном случае называется либо географическая точка с известными координатами, либо условная прямая или кривая линии, проходящие через данную точку и имеющие следующее свойство - двигающийся в пределах данного сегмента дороги транспортное средство по одной полосе (без перестроения) сохраняет свое расстояние до этой гиперплоскости (см. фиг. 1). В качестве примера гиперплоскости можно привести разделительную линию на прямом участке дороги или центр закругления (поворота).
Отметим, что термин "опорная гиперплоскость" никак не связан с двумерным геометрическим объектом в трехмерном пространстве. Данное название позаимствовано из теории машинного обучения, где понятие гиперплоскости используется для обозначения разделяющего пространства признаков, размерность которого меньше размерности исходного пространства. В данном случае, опорная гиперплоскость используется для снижения пространства признаков - два признака, задающих координаты автомобиля (широта и долгота), заменяются одним - расстоянием до опорной гиперплоскости.
Получаемые от системы глобальной навигации данные о координатах транспортного средства, его скорости и направлении, в силу множества факторов являются неточными. К таким факторам относятся: метеоусловия, наличие или отсутствие жилой застройки, рельеф местности, текущее положение спутников, ошибки округления во время вычисления и т.д. Другими словами, в получаемых данных присутствует полезный сигнал и некая случайная шумовая составляющая.
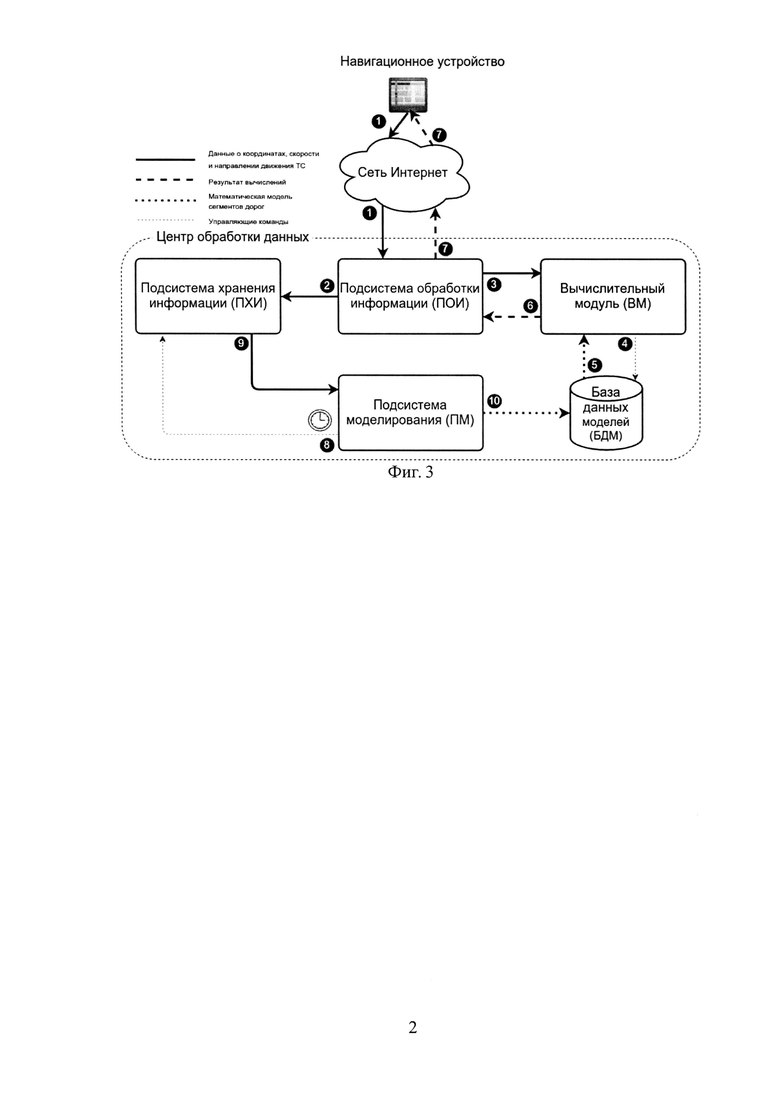
Рассмотрим частный случай, когда проезжая часть содержит только одну полосу для движения. Можно допустить, что по аналогии со многими другими физическими процессами, происходящими в природе, наблюдаемые данные (то есть, расстояния от проезжающих транспортных средств до опорной гиперплоскости) будут описываться нормальным распределением (распределением Гаусса), причем его математическое ожидание будет соответствовать центру рассматриваемой полосы. Расширив данное утверждение на случай многополосной дороги, можно сказать, что наблюдаемое распределение расстояний до опорной гиперплоскости в этом случае будет представлять собой сумму (смесь) нормальных распределений, каждая из которых описывает движение по отдельной полосе (см. фиг. 2). Причем, в общем случае, вес каждого из распределений в общей сумме будет различен. Например, выделенные для общественного транспорта полосы движения будут иметь небольшой вес относительно соседних полос. Показанное на фиг. 2 распределение является весьма схематичным и предназначено лишь для пояснения базовых принципов, лежащих в основе предложенного способа. В реальности, данное распределение будет выглядеть гораздо сложнее. Значения расстояний, где нормальные распределения «сменяют» друг друга, являются границами принятия решений. При использовании в расчетах достаточного количества независимых наблюдений, данные границы принятия решений будут соответствовать реальной дорожной разметке, разделяющей полосы движения. По сути, данные значения границ будут составлять «цифровую разметку» рассматриваемого сегмента дороги. Безусловно, данная математическая модель сильно упрощена, так как не учитывает, например, движение транспортного средства относительно центра полос, частые перестроения из одной полосы в другую, расположение навигационного приемника внутри салона и другие факторы. В связи с вышеуказанным решение рассматриваемой задачи носит вероятностный характер. Предложенный способ не гарантирует стопроцентную точность определения текущей полосы движения. В качестве ответа она лишь возвращает вероятности, которые соответствуют движению по той или иной полосе.
Разделение сегментов дорог на отдельные «цифровые полосы» открывает возможности по улучшению качества информационного обслуживания, связанного, например, с навигацией по заданному маршруту и сообщением о заторах на дорогах. В частности, среднюю скорость движения можно рассчитывать не для всего сегмента или его части, а для отдельных полос. В связи с этим появляется возможность обнаружения кратковременного перекрытия на отдельных полосах (из-за неисправности транспортного средства или случившегося дорожно-транспортного происшествия). Подобное обнаружение возможно при наличии достаточной интенсивности движения и получаемых данных от проезжающих автомобилей, а также при частом перестроении математической модели сегмента дороги и пересчете средней скорости движения по отдельным полосам. Как правило, перекрытая полоса будет характеризоваться:
- резким уменьшением средней скорости движения на данной полосе во времени;
- меньшей средней скоростью движения по сравнению с другими полосами на данном сегменте.
Для определения долгосрочного перекрытия полос движения (например, из-за проводимых ремонтных работ) может также использоваться сравнение нескольких «цифровых разметок» одного и того же участка дорог за разные промежутки времени. Перекрытая полоса будет выделяться резким снижением плотности наблюдений, соответствующих данному участку.
Кроме этого, «цифровые полосы» открывают перспективы для микронавигации при движении по заданному маршруту. В отличие от глобальной навигации, где ведение осуществляется через отдельные узлы дорожно-уличной сети (перекрестки, многоуровневые транспортные развязки и т.д), микронавигация используется для определения необходимости своевременного перестроения в нужную полосу. На многополосных дорогах для движения по различным маршрутам используются различные полосы. Своевременное перестроение в ту или иную полосу является важным условием для корректного движения по выбранному маршруту. Современные навигационные программы не предупреждают о необходимости перестроения в нужную полосу, что зачастую приводит к невозможности осуществления необходимого маневра (поворота, разворота и т.д.) и ухода с маршрута. Следствием ухода с заданного маршрута является необходимость его перестроения и движения по новому маршруту, что влечет за собой существенную потерю времени владельца автомобиля и увеличение пробега транспортного средства.
Возможность отслеживания текущей полосы движения позволяет своевременно предупредить водителя о необходимости перестроения. В этом случае, система подобна рекомендательным системам - свое решение она принимает исходя из «опыта», полученного по данным от других транспортных средств, ранее выполнявших заданный маневр. В случае обнаружения аномалии при сравнении текущего положения автомобиля и математической модели, описывающей нужный маневр на данном сегменте дороги, вычислительный модуль выдает рекомендации сменить полосу. При этом, следует заметить, что точность определения текущей полосы в данном случае не важна. Для рекомендации достаточно выявить аномалию, то есть существенное отклонение текущего расстояния до опорной гиперплоскости от совокупности полученных ранее значений.
Визуализация расположения транспортного средства относительно полос движения, обнаруженных заторов, а также рекомендаций по смене полосы, может включать в себя как вывод информации в графическом виде на экран навигационной программы, так и в виде голосовых сообщений.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на сопровождающие чертежи, на которых:
- Фиг. 1 описывает общие принципы, лежащие в основе определения занимаемой транспортным средством полосы движения.
- Фиг. 2 описывает понятие опорной гиперплоскости.
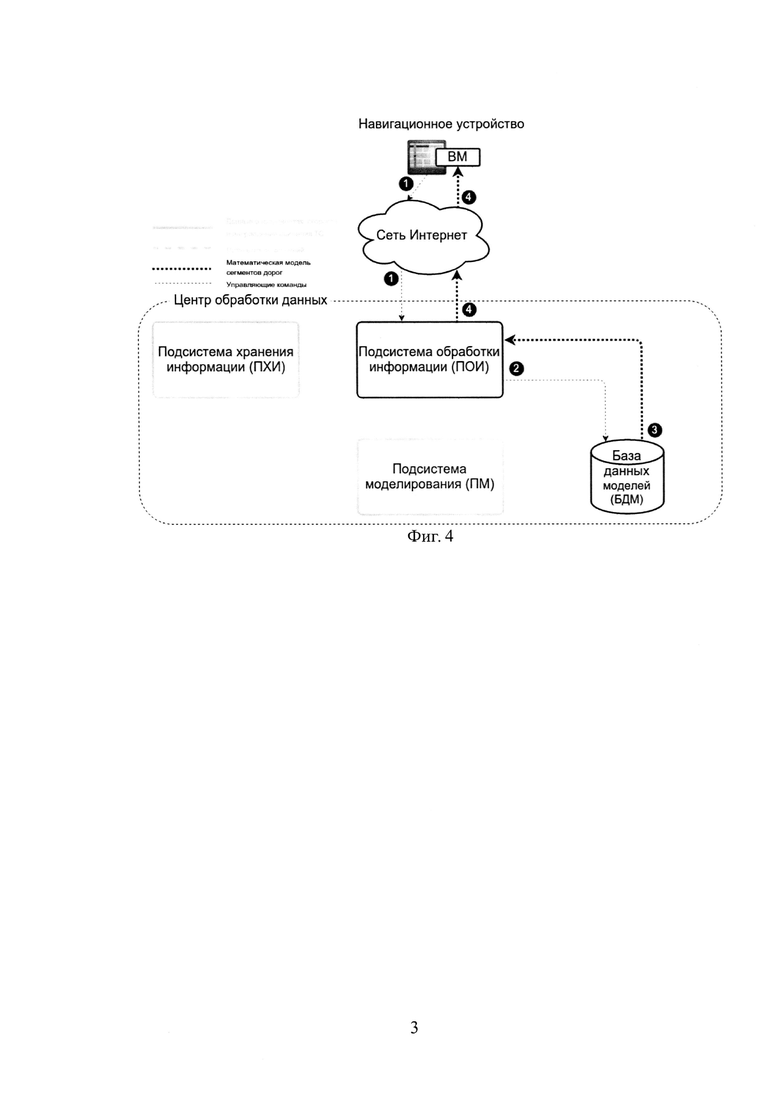
- Фиг. 3 описывает состав и схему взаимодействия компонентов системы при работе в онлайн-режиме.
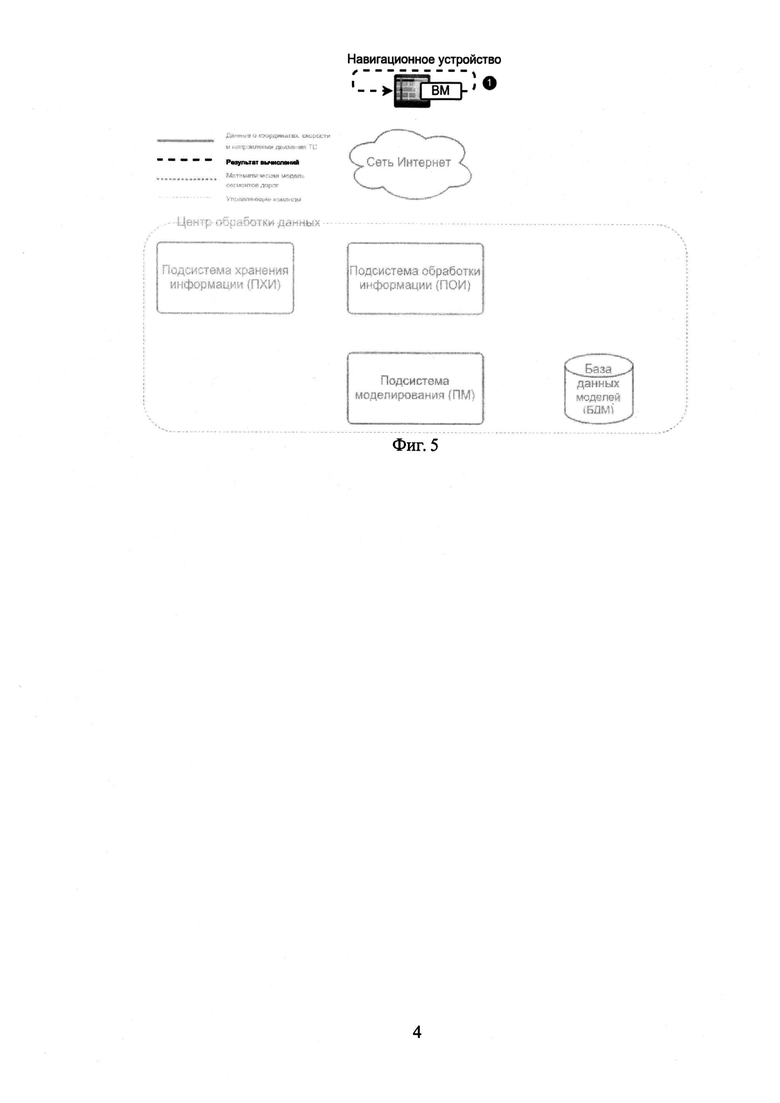
- Фиг. 4 описывает состав и схему взаимодействия компонентов системы при работе в оффлайн-режиме на этапе планирования маршрута движения.
- Фиг. 5 описывает состав и схему взаимодействия компонентов системы при работе в оффлайн-режиме во время движения автомобиля.
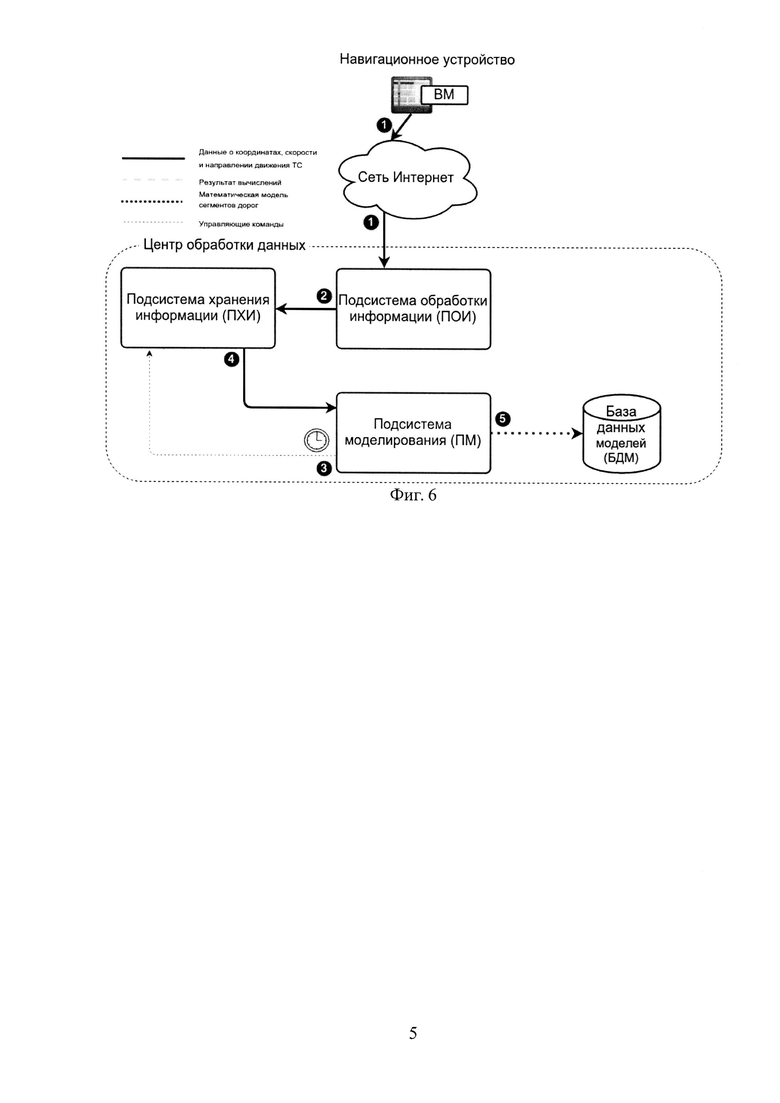
- Фиг. 6 описывает состав и схему взаимодействия компонентов системы при работе в оффлайн-режиме после поездки.
Подробное описание предпочтительных вариантов осуществления изобретения
В данном разделе приведено подробное описание двух вариантов осуществления изобретения. Первый вариант предполагает наличие функционирующего во время движения транспортного средства сетевого соединения навигационного устройства с серверной частью системы. В этом случае все вычисления производятся на стороне сервера, навигационное устройство лишь визуализирует полученные результаты расчетов. Альтернативный вариант предусматривает размещение вычислительного модуля в составе навигационного устройства, что позволяет использовать предложенный способ определения текущей полосы в местах, где недоступно соединение с сервером.
Во время движения по дороге навигационное оборудование, установленное в транспортном средстве, получает данные со спутников глобальной навигационной системы и вычисляет координаты текущего положения транспортного средства, его мгновенную скорость и направление движения. Эта совокупность данных, относящихся к одному моменту времени и характеризующая движение транспортного средства в этом момент времени, далее будем называть наблюдением. Вычисленные данные с использованием глобальной коммуникационной сети (в частности, сети Интернет) передаются в центр обработки данных на один из серверов подсистемы обработки информации (ПОИ). Для повышения пропускной способности системы, обеспечения ее отказоустойчивой работы и снижения времени задержки на передачу и обработку информации могут использоваться несколько центров обработки данных, территориально удаленных друг от друга.
Кроме подсистемы обработки информации в состав центра обработки данных также входят: подсистема хранения (ПХ), вычислительный модуль (ВМ), подсистема моделирования (ПМ) и база данных моделей (БДМ). Следует заметить, что данный состав подсистем является весьма условным. Возможно применение различных сочетаний перечисленных подсистем внутри одного центра обработки данных. Например, один центр обработки данных может целиком отвечать за хранение «сырых» данных и моделирование, а другой - за хранение готовых математических моделей и вычисление вероятности полос двигающихся в текущий момент времени транспортных средств.
Далее приведено более подробное описание основных принципов взаимодействия этих подсистем, как если бы они располагались в одном центре обработки данных.
Подсистема обработки одновременно передает получаемые с транспортного средства данные в подсистему хранения (стадия 2) и вычислительный модуль (стадия 3). Пакет данных может включать в себя одно или одновременно несколько наблюдений, относящихся соответственно к одному или нескольким моментам времени. Хранение данных о координатах, мгновенной скорости и направлении движения транспортных средств необходимо для первоначального расчета математической модели отдельных сегментов дорожно-уличной сети («цифровой разметки»), а также ее дальнейшего уточнения. Вычислительный модуль обращается к базе данных моделей (стадия 4), которая возвращает математические модели сегментов дорог, по которым двигается транспортное средство (стадия 5). Вычислительный модуль производит расчет вероятности движения по той или иной полосе и, при необходимости, вырабатывает рекомендации по перестроению. Сформированные ответ возвращается подсистеме обработки информации (стадия 6), откуда через глобальную коммуникационную систему в составе пакета данных передаются обратно на пользовательское устройство (стадия 7), где происходит визуализация - путем графического отображения и/или голосового оповещения.
За формирование актуальной «цифровой разметки» отвечает подсистема моделирования, которая на регулярной основе запрашивает в подсистеме хранения «сырые данные» (стадия 8), получает эти данные (стадия 9) и строит математические модели отдельных сегментов дорог. Периодичность актуализации модели может быть различной и зависит от таких факторов, как: пропускная способность сегмента дороги, частота возникновения дорожно-транспортных происшествий, проводимые ремонтные работы, связанные с перекрытием полос и т.д.
Качество математической модели для каждого сегмента определяется количеством полученных измерений от транспортных средств, двигавшихся по этим сегментам. В случае отсутствия измерений построить математическую модель сегмента, а значит, и определить текущую полосу, невозможно. При накоплении некого порогового количества наблюдений «цифровая разметка» будет с большой точностью соответствовать реальной. Эта точность будет достигнута, несмотря на случайные ошибки, заложенные в каждом таком наблюдении, что достигается за счет эффекта больших данных. Точность определения координат зависит от множества факторов - метеоусловий, рельефа местности, наличия застройки и т.д. Поэтому пороговое значение для каждого сегмента будет различным.
Сформированные модели сохраняются в базе данных (стадия 10), откуда по запросу извлекаются вычислительным модулем.
Количество наблюдений в пакете данных и интервал передачи может быть различным в зависимости от предъявляемой точности и энергопотребления устройства. Наименее точным и одновременно энергозатратным будет являться вариант передачи одной пары координат (широта-долгота) один раз в несколько секунд. В случае передачи в едином пакете нескольких пар координат, полученных каждую секунду, с интервалом 5 секунд, точность определения должна существенно возрасти. Возможен вариант передачи пар координат с перекрытием, например, каждые 5 секунд передается пакет данных, содержащий наблюдения за предыдущие 10 секунд движения. Предполагается, что режим работы будет выбирать производитель навигационной программы. При этом интервал должен выбираться таким образом, чтобы вероятность перестроения из одной полосы в другую за данный промежуток времени была минимальной.
Альтернативным вариантом является использование вычислительного модуля в составе программного обеспечения на пользовательском устройстве. В этом случае «цифровая разметка» загружается заранее при составлении маршрута движения или по запросу при приближении к сегменту дороги. Однако необходимость в передаче координат транспортного средства остается из-за необходимости уточнения математической модели сегмента дороги. При этом требование оперативной передачи данных может быть смягчено. Передача и обработка всего или части трека может быть осуществлена в пакетном режиме позднее, при появлении возможности передачи данных о движении автомобиля через доступные коммуникационные сети.
Взаимодействие навигационного устройства с другими компонентами системы можно разделить на три стадии - стадия загрузки маршрута (см. фиг. 4), движение по маршруту (см. фиг. 5) и выгрузка трека (см. фиг. 6). На стадии загрузки маршрута навигационное устройство через глобальную коммуникационную сеть обращается к подсистеме обработки информации, расположенной в центре обработки данных (стадия 1 на фиг. 4). Подсистема обработки данных обращается в базу данных математических моделей (стадия 2), которая возвращает «цифровые разметки» сегментов дорог, соответствующих предполагаемому маршруту движения (стадия 3). Данные математические модели через глобальную коммуникационную сеть загружаются в навигационную программу на пользовательском устройстве (стадия 4). Во время следования автомобиля по маршруту вычислительный модуль, входящий в состав навигационного устройства, производит необходимые вычисления, связанные с расчетом текущей полосы движения и выработке рекомендаций по перестроению (стадия 1 на фиг. 5). Учитывая, что «цифровая разметка» уже была загружена ранее, доступ к центру обработки данных через каналы связи не требуется. После завершения поездки или в других случаях, когда появляется доступ к коммуникационной сети, навигационное устройство передает накопленные за время движения автомобиля наблюдения (стадия 1 на фиг. 6). Данные наблюдения сохраняются в подсистеме хранения информации (стадия 2). Подсистема моделирования на регулярной основе запрашивает «сырые» данные в подсистеме хранения (стадия 3), а полученные данные использует для уточнения математических моделей (стадия 4). Уточненные «цифровые разметки» сохраняются в базе данных моделей (стадия 5), откуда позднее вновь загружаются в навигационные устройства пользователей.
Изобретение относится к области навигационного приборостроения и может найти применение в системах навигации автотранспортных средств. Технический результат – расширение функциональных возможностей на основе повышения качества навигации транспортного средства и улучшения информационного обслуживания пользователей, использующих навигационные программы и устройства. Для этого способ определения текущей полосы движения основан на применении получаемых от глобальной навигационной спутниковой системы координат двигающегося автомобиля и так называемой «цифровой разметки». «Цифровая разметка» представляет собой математическую модель отдельных участков дорожно-уличной сети, построенную по совокупности наблюдений о движении множества других транспортных средств, ранее проезжавших на данном участке дороги, и описывающие реальное расположение полос движения на проезжей части, относительно выбранных опорных гиперплоскостей. Определение полосы движения, которое занимает транспортное средство, при этом носит вероятностный характер. Для повышения точности вычисления может использоваться последовательность наблюдений, соответствующих различным, но близким друг к другу моментам времени. При этом способ позволяет оценивать относительную загруженность отдельных полос на участках дорожно-уличной сети, а также обнаруживать перекрытые полосы из-за проводимых ремонтных работ или случившихся дорожно-транспортных происшествий. Используя введенное понятие «микронавигации», которое представляет собой процесс выработки и визуализации рекомендаций по своевременному перестроению в нужную полосу при следовании по заранее заданному маршруту с целью успешного выполнения маневров - поворотов на перекрестках и транспортных развязках, объездов препятствий и т.д. Кроме самого способа определения полосы движения предложены варианты реализации программно-аппаратной системы, обеспечивающей возможность вычисления текущей полосы движения и выработки рекомендаций по ее изменению как с доступом через глобальные коммуникационные сети (онлайн-режим), так и без такого доступа (оффлайн-режим). 7 н. и 5 з.п. ф-лы, 6 ил.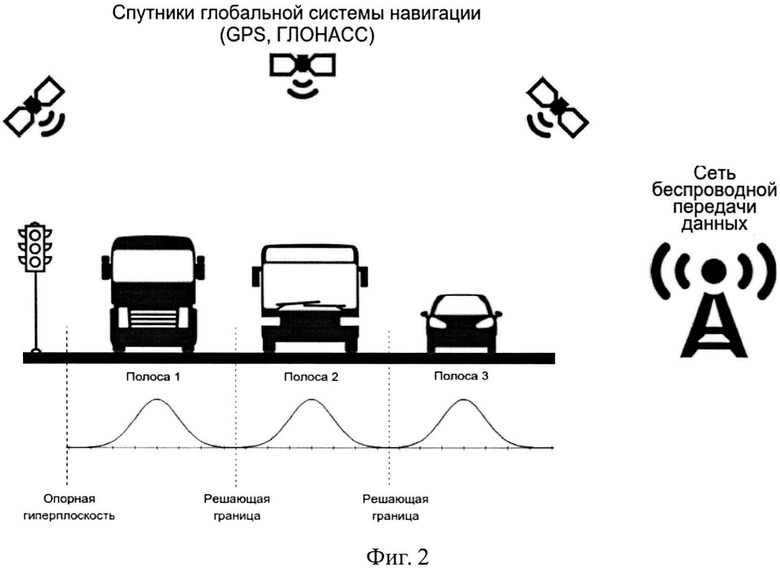
1. Способ определения полосы движения на проезжей части, занимаемой транспортным средством, заключающийся в преобразовании полученных от системы спутниковой навигации координат навигационного устройства, установленного в транспортном средстве, в расстояние до опорной гиперплоскости, представляющей собой условную линию, проходящую через географическую точку с известными координатами и имеющую свойство сохранения расстояния от транспортного средства до этой гиперплоскости для двигающегося в пределах данного сегмента дороги транспортного средства по одной полосе без выполнения маневра перестроения, сравнении данного расстояния с решающими границами, соответствующими математической модели («цифровой разметке») сегмента дорожно-уличной сети, полученной путем выбора оптимальной функции распределения, наиболее точно соответствующей совокупности наблюдений о движении других транспортных средств, находившихся ранее на данном сегменте дороги, вычислении вероятности движения по той или иной полосе и выборе наиболее вероятного варианта.
2. Способ определения полосы движения на проезжей части, занимаемой транспортным средством, заключающийся в преобразовании полученных от системы спутниковой навигации координат навигационного устройства, установленного в транспортном средстве, в расстояние до географической точки с известными координатами, имеющей свойство сохранения расстояния от транспортного средства до этой точки для двигающегося в пределах данного сегмента дороги транспортного средства по одной полосе без выполнения маневра перестроения, сравнении данного расстояния с решающими границами, соответствующими математической модели («цифровой разметке») сегмента дорожно-уличной сети, полученной путем выбора оптимальной функции распределения, наиболее точно соответствующей совокупности наблюдений о движении других транспортных средств, находившихся ранее на данном сегменте дороги, вычислении вероятности движения по той или иной полосе и выборе наиболее вероятного варианта.
3. Способ по п. 1, отличающийся тем, что для принятия решения дополнительно используется совокупность независимых наблюдений, соответствующих положениям транспортного средства в различные моменты времени в прошлом.
4. Способ по п. 3, отличающийся тем, что для принятия решения состав совокупности независимых наблюдений дополняется частью использованной при предыдущем расчете совокупности независимых наблюдений, а сама совокупность наблюдений используется в следующем расчете.
5. Способ по п. 3, отличающийся тем, что для принятия решения состав совокупности независимых наблюдений дополняется частью использованной при предыдущем расчете совокупности независимых наблюдений, а часть самой совокупности наблюдений используется в следующем расчете.
6. Система для определения текущей полосы движения транспортного средства, включающей в себя навигационное устройство, расположенное в транспортном средстве, а также подсистему обработки, хранения, моделирования, базу данных моделей и вычислительный модуль, входящие в состав центра обработки данных, доступный навигационному устройству с использованием глобальной коммуникационной сети, и которая осуществляет сбор и передачу в центр обработки данных наблюдений о координатах, скорости и направлении движения транспортного средства, накопление наблюдений, полученных от различных транспортных средств, расчет и хранение математических моделей, соответствующих различным сегментам улично-дорожной сети («цифровой разметки»), сравнение текущих наблюдений с параметрами математической модели, соответствующей сегменту дороги, вычисление вероятностей движения по отдельным полосам проезжей части и выработку рекомендаций по перестроению транспортного средства в другие полосы.
7. Система по п. 6, отличающаяся тем, что вычислительный модуль, рассчитывающий вероятность движения по отдельным полосам и выработку рекомендаций по перестроению транспортного средства в другие полосы, входит в состав навигационной программы, расположенной в транспортном средстве, что обеспечивает возможность определения текущей занимаемой полосы движения и выработки рекомендаций о необходимости занятия других полос без доступа к центру обработки данных через глобальную коммуникационную сеть.
8. Способ определения относительной загруженности отдельных полос сегментов дорожно-уличной сети, заключающийся в разбиении совокупности наблюдений, полученных от навигационных устройств транспортных средств за определенный интервал времени, на группы, соответствующие наиболее вероятным полосам движения для каждого транспортного средства, вычислении и сравнении между собой средних скоростей движения транспортных средств, отнесенных к каждой такой группе.
9. Способ определения перекрытия отдельной полосы движения на проезжей части, заключающийся в формировании на основе совокупности наблюдений, полученных от навигационных устройств транспортных средств за определенный интервал времени, оптимальной функции распределения расстояний от транспортных средств до опорной гиперплоскости, наиболее точно соответствующей совокупности наблюдений о движении всей совокупности транспортных средств на участке дорожно-уличной сети и представляющих собой сумму (смесь) таких нормальных распределений, что математическое ожидание каждого из которых соответствует центру отдельной полосы движения, вычислении относительных значений (весов) полученных функций распределения, сравнении их между собой и выбора в качестве потенциально перекрытой полосы движения той, которой соответствует распределение расстояний до опорной гиперплоскости с минимальным относительно других распределений весом.
10. Способ по п. 9, отличающийся тем, что в дополнение к сравнению относительных значений (весов) для каждого распределения, соответствующего отдельной полосе движения, применяется сравнение динамики изменений относительных значений (весов) во времени.
11. Способ выработки рекомендаций пользователям навигационных программ по своевременной смене полосы движения транспортного средства для успешного выполнения необходимого маневра при следовании по заданному маршруту, заключающийся в сравнении текущей полосы движения с полосами движения, которые занимали другие транспортные средства, ранее находившиеся на данном сегменте дороги и выполнившие аналогичный маневр, обнаружении отклонений выше заданного порога в результатах данного сравнения, формировании и передаче пакета данных, содержащих рекомендацию в машиночитаемом виде, и визуализации путем вывода рекомендации на экран навигационной программы и голосового оповещения.
12. Способ выработки рекомендаций пользователям навигационных программ по своевременной смене полосы движения транспортного средства для успешного выполнения необходимого маневра при следовании по заданному маршруту, заключающийся в сравнении расстояний до опорной гиперплоскости, соответствующей сегменту дороги, на котором находится транспортное средство, с расстоянием до той же самой опорной гиперплоскости для других транспортных средств, ранее находившихся на данном сегменте дороги и выполнявших аналогичный маневр, обнаружении отклонений вышезаданного порога в результатах данного сравнения, формировании и передаче пакета данных, содержащих рекомендацию в машиночитаемом виде, и визуализации путем вывода рекомендации на экран навигационной программы и голосового оповещения.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ ЗА АВТОТРАНСПОРТНЫМ ДВИЖЕНИЕМ "РЕАЛ-ТОТАЛЬ" | 2010 |
|
RU2409868C1 |
| Прибор для нагревания воздуха | 1929 |
|
SU17679A1 |
| US 2003210806 A1, 13.11.2003 | |||
| US 5982298 A, 09.11.1999 | |||
| US 20090326752 A1, 31.12.2009. | |||

