Изобретение относится к области управления и организации перемещений объектов движения, в частности к способам управления автотранспортными потоками с помощью средств моделирования, и может применяться для прогнозирования автотранспортных потоков при решении транспортных проблем в мегаполисе, в частности, с применением к Московской агломерации.
В мегаполисах действуют десятки миллионов автомобилей различного типа с различными маршрутами, и картина движения развивается во времени, при этом наиболее интересным является то время, которое характеризуется как пробка. Для борьбы с ними затрачиваются финансовые средства и организуются разнообразные меры для улучшения движения. Поведение такой большой системы объектов является многопараметрической задачей. Отметим, что сегодня имеется значительный объем информации с видеокамер и других средств наблюдения. В чем сегодня необходимость и актуальность создания математической модели поведения транспортных потоков? Принятие управленческих решений (сотен в день) требует расчета их эффективности, сравнения в случае ограниченности ресурсов. Для примера приведем ряд из них: строительство виадуков, стоянок для авто, расширение и трансформация улиц и территорий, реагирование на аварии, организация ремонта дорог, борьба с нарушениями правил парковки, работа светофоров и многое другое. Очевидно, что не нужно требовать детального совпадения реальной транспортной обстановки с той, которая реализуется в модели. Модель должна в статистическом смысле отражать существующее положение дел и претендовать на достоверность сравнительных оценок при различных вариантах управленческих решений.
Математические модели, применяемые для анализа транспортных сетей, весьма разнообразны по решаемым задачам, математическому аппарату, используемым данным и степени детализации описания движения.
Известна комплексная модель работы транспортной системы крупного города или городской агломерации, позволяющая моделировать передвижения на всех видах транспорта (Моделирование транспортных потоков в крупном городе с применением к Московской агломерации, А.С.Алиев /Институт системного анализа РАН, Москва/, А.И.Стрельников /ЦНИИП градостроительства РААСН/, В.И.Швецов, /Институт системного анализа РАН, Москва/, Ю.З.Шершевский /Гос. институт проектирования городов/, опубликовано в журнале Автоматика и Телемеханика 2005, №11, с.113-125), предназначенная для прогнозирования транспортных и пассажирских потоков. Существенными чертами модели являются: моделирование различия в структуре передвижений в разное время суток, а также в зависимости от дня недели и времени года; последовательное использование концепции обобщенной цены передвижения в качестве критерия оценки путей и межрайонных транспортных дальностей. Модель практически откалибрована для транспортной сети Московской агломерации, включающей г.Москву и пригороды, в которых сконцентрирована значительная часть населения Московской области. Компьютерная реализация осуществлена с использованием интегрированной среды разработчика в области моделирования транспортных потоков TRANSNET. Для прогноза структуры передвижений производится расчет целого набора матриц корреспонденции между расчетными районами города, соответствующих передвижениям разного типа (пешеходным, автомобильным и совершаемым в системе общественного транспорта), с разными целями и в разное время суток. Для учета суточной неравномерности расчеты производятся отдельно для каждого периода суток (например, для утреннего и вечернего часа пик и на средний дневной час). Для моделирования загрузки улично-дорожной сети используется концепция равновесного распределения потоков. Расчет загрузки системы общественного транспорта может производиться по модели оптимальных стратегий, явно использующей систему маршрутов, а также приближенно в сетевой форме (по оптимальным путям). В качестве критерия оценки путей при расчете загрузки и для оценки межрайонных транспортных дальностей при расчете корреспонденции используется обобщенная цена передвижения, которая включает в себя факторы разной природы, такие как время или цена (денежные затраты) передвижения.
Предъявляемые аналитическими моделями требования к условиям проведения экспериментов (равновесие потока и взаимно однозначная зависимость скорости и плотности) делают область их применения ограниченной.
Также известна группа изобретений по патенту RU 2406158 (опубликовано: 10.12.2010 Бюл. №34), относящаяся к системам и/или способам, которые облегчают вероятностное предсказание пункта(ов) назначения. Могут быть получены входные данные, которые могут относиться к пользователю, истории пользователя (например, исторические данные), к отдельным пользователям, топографии географической области (например, данные о свойствах местности), оптимальным маршрутам, распределению времени передвижения, текущему передвижению (например, местоположению, изменению местоположения, времени) и т.д. Предполагается, что входные данные могут быть получены из любого источника (например, компонент местоположения, компонент таймера, хранилище данных, Интернет). Предсказание может быть совершено с использованием одних или более априорных данных и/или одной или более вероятностей. Например, априорными данными могут быть априорные данные о персональных пунктах назначения и/или априорные данные о свойствах местности. Дополнительно, вероятности могут быть вероятностью оптимального движения и/или вероятностью времени передвижения. Следует принимать во внимание, что одни или более априорных данных, одна или более вероятностей или комбинация априорных данных и вероятностей могут использоваться, чтобы сформировать предсказанный(ные) пункт(ы) назначения. В соответствии с различными аспектами заявленной сущности изобретения компонент оценки пункта назначения может вероятностно предсказать пункт назначения для передвижения на основе априорных данных и/или вероятности(ей). Компонент оценки пункта назначения может применяться, чтобы выбрать и/или объединить априорные данные и/или вероятность(и), чтобы вывести предсказанные пункты назначения. Согласно примеру любая комбинация априорных данных и/или вероятностей может применяться компонентом оценки пункта назначения посредством использования правила Байеса. Способ, который способствует определению пункта назначения пользователя, содержит этапы, на которых формируют вероятностную координатную сетку, связанную с географическим местоположением, оценивают данные, связанные с передвижением, чтобы определить одно или более из априорных данных и вероятностей, и предсказывают один или более пунктов назначения, относящихся к передвижению, с помощью координатной сетки посредством вероятностного объединения одних или более априорных данных и вероятностей. Способ дополнительно содержит этапы, на которых: выбирают одно или более из априорных данных и вероятности, чтобы объединить вероятностным образом; предсказывают один или более пунктов назначения в ходе передвижения; предоставляют релевантную информацию, связанную с одним или более предсказанными пунктами назначения; формируют априорные данные на основе одного или более из набора предыдущих пунктов назначения пользователя и вероятности того, что ячейка является пунктом назначения на основе свойств местности в ячейке.
Известный способ не может описать движение большого количества движущихся объектов (машин) в определенных транспортных магистралях, т.к. рассматривает построение маршрутов, в которых конечная точка может выбираться вероятностным образом, т.е учитывается только вероятностная конечная точка маршрута, при этом не учитываются транспортные потоки, смоделированные детальными объектами (машинами), которые движутся в зависимости от различных условий, и среди которых есть маршруты с фиксированной конечной точкой (автобусы).
Эффективным и информативным способом моделирования движения совокупности транспортных средств по магистрали являются клеточные автоматы. На основе подхода микромоделирования разработан ряд моделей, позволяющих отслеживать динамику как отдельно взятого автомобиля, так и потока в целом, и получать исходные данные для оценки времени передвижения, времени ожидания в пробке, средней скорости и т.д.
Известен способ прогнозирования перемещений объектов движения в мегаполисе, который наиболее близок предлагаемому изобретению, включающий многофакторное моделирование автотранспортных потоков на основе клеточных автоматов (Долгушин Д.Ю. Автореферат. Многофакторное моделирование автотранспортных потоков на основе клеточных автоматов. Государственное образовательное учреждение высшего профессионального образования "Сибирская государственная автомобильно-дорожная академия (СибАДИ)" 2011 г.). Способ включает построение имитационной модели многополосного движения разнородных потоков автотранспорта, основанной на стохастическом транспортном клеточном автомате. Данная модель позволяет представлять разнородный транспортный поток, образованный автомобилями различных типов (легковыми, грузовыми, автобусами) и обладает переменной разрешающей способностью, делающей возможным варьирование длины ячеек автомата. В модель введены дополнительные правила, позволяющие учитывать эксплуатационное состояние дороги и локальные скоростные ограничения, устанавливаемые знаками дорожного движения. Автомат представлен массивом ячеек. Длина и ширина автомата определяется по длине магистрали и числу полос. Длина ячейки характеризует разрешающую способность автомата и принимается равной определенному значению (значение ширины ячейки не оказывает влияния на обновление автомата и потому опущено). Т.к. время в модели дискретно и один шаг обновления соответствует 1 сек, то возможно моделирование движения машин со скоростью 20, 40, 60 км/ч и т.д. На массиве в произвольном порядке располагаются транспортные средства. Каждая ячейка массива представляет сегмент дорожного полотна. Число ячеек, необходимое для представления автомобиля, различается в зависимости от его типа. Обновление конфигурации автомата проводится последовательно, в два этапа: сначала определяется необходимость и возможность смены полосы для всех автомобилей; затем на каждой полосе проводится независимое обновление в соответствии с правилами для однополосной модели, при этом используется конфигурация, полученная на первом этапе. Оба этапа модифицированы и дополнены в соответствии с задачей учета состояния дороги и ограничений скорости. Представленная модель имитирует движение машин по линейному участку дороги, не связанному с другими магистралями. Для моделирования дорожного движения по сети дорог разработана модель улично-дорожной сетки (УДС). Дороги в ней связываются с помощью регулируемых и нерегулируемых перекрестков, а также узлов, позволяющих представлять нелинейные участки дороги (повороты и т.п.). В качестве основы модели пересечения магистралей применяется Т-образный перекресток - с каждой из четырех "сторон" к нему может примыкать до двух дорог (для каждого направления). Контроль потока транспорта на регулируемых перекрестках осуществляется с помощью светофоров. На нерегулируемых перекрестках или пересечениях с вышедшими из строя светофорами регулирование осуществляется на основе приоритетов первоочередного движения. Нередко на дорогах города встречаются нерегулируемые пересечения с пешеходными переходами. При этом часто такие пересечения имеют место на магистралях с высокой интенсивностью движения, снижая их пропускную способность. Моделирование таких случаев осуществляется с помощью соответствующей модели перехода, работа которого определяется вероятностью появления пешеходов и временем, необходимым для перехода. В случае появления пешехода участок блокируется в течение периода, имитируя ожидание водителей перехода дорожки пешеходами. Для проведения численных экспериментов была разработана программная реализация модели на языке С++. Благодаря объектно-ориентированному подходу основные сущности модели (автомобиль, дорожный сегмент, светофор и т.д.) представлены в виде набора атрибутов и методов, удобном для манипуляций. Собственно автомат реализован в виде массива массивов (англ. array of arrays). Способ позволяет: прогнозировать дорожные ситуации; осуществлять оценку задержек на участках УДС при заданных условиях; осуществлять оценку возможности и целесообразности внесения изменений в структуру УДС; осуществлять оценку влияния автотранспорта на экологическую ситуацию в пределах магистрали.
Недостатком известного способа является то, что для адекватного моделирования более сложных аспектов динамики транспортного потока необходимы дополнительные правила и корректировка предложенных.
Техническим результатом заявляемого изобретения является повышение достоверности и точности прогнозирования.
Указанный технический результат достигается за счет того, что в способ прогнозирования перемещений объектов движения в мегаполисе путем многофакторного моделирования перемещаемого транспортного потока, включающий структурную разбивку транспортного потока на различные типы объектов движения, к которым относятся грузовой автотранспорт, легковой автотранспорт и автобусы, построение привязанной к реальной геометрии города улично-дорожной сетки (УДС) с разбивкой ее на ячейки, параметры каждой из которых обеспечивают размещение в ней легкового транспортного средства, оценивают данные по перемещению объекта движения в другую ячейку, которые связаны с состоянием ячейки, типом объекта движения, правилами движения и реагирования на сигналы светофора, нерегулируемые перекрестки и пешеходные переходы с последующим заданием каждому объекту в рамках сетки маршрута и времени его начала с определенной ячейки в соответствии с начальным распределением объектов движения по ячейкам сетки, обновление конфигурации модели путем перемещения объектов по сетке, введен ряд отличительных признаков, а именно:
- для каждого транспортного средства определяют набор маршрутов с начальной и конечной точкой в течение суток, для чего
- при осуществлении структурной разбивки транспортного потока учитывают также такси, служебные автомобили различных организаций и не отнесенные к определенному типу прочие автотранспортные средства,
- кроме того грузовой автотранспорт подразделяют на внутренний и внешний транспорт, а легковой - на транспорт, въезжающий в мегаполис и личный легковой транспорт,
- осуществляют классификацию ячеек, которые подразделяют на ячейки движения, в которых может находиться объект и объект планирует двигаться дальше в соответствии со своим маршрутом,
- ячейки парковки, которые заняты под парковку,
- ячейки светофоры, нахождение в которых запрещено,
- ячейки, где движение запрещено, и
- новые ячейки, которые создают путем управленческих решений,
- при этом ячейки движения временно могут быть объявлены ячейками парковки,
- далее создают базы данных по ячейкам с описанием их параметров,
- в параметры включают номер ячейки, однозначно идентифицирующий ее на карте города, номер сопряженной ячейки, в которую может перейти объект движения, информацию о том занята или свободна ячейка и алгоритм перемещения, для ячеек светофоров включают информацию о том, сколько шагов по времени она закрыта и для каких ячеек, а для ячеек, пограничных с ячейками светофорами, включают информацию о закрытии или открытии светофора,
- оценку данных, связанных с передвижением осуществляют по параметрам ячеек,
- с помощью параметров определяют правила нахождения в ячейках объектов движения, формируя функцию распределения для каждого типа объекта движения в зависимости от времени суток, используя входные данные и вероятностные оценки на основе метода Монте-Карло,
- кроме этого учитывают возможность попадания объекта движения в аварию в соответствии с функцией распределения аварийных случаев, которую формируют с учетом годовой статистики и фактора погоды,
- причем маршрут объекта движения представляют в виде определенной последовательности номеров ячеек,
- при этом в расчете за нулевую точку принимают время, когда движение имеет минимальное напряжение,
- выбор шага обновления по времени осуществляют, поделив размер ячейки на максимально разрешенную скорость в мегаполисе.
Определение для каждого транспортного средства набора маршрутов с начальной и конечной точкой в течение суток позволяет отразить существующее положение дел и обеспечить достоверность сравнительных оценок при различных вариантах управленческих решений и выработки обоснованных стратегий развития.
Разбивка объектов движения на: маршрутные автобусы /троллейбусы, такси, служебные автомобили различных ведомств и организаций, грузовой внутренний транспорт, грузовой внешний транспорт, легковой транспорт, въезжающий в Москву, личный легковой транспорт, как правило, со спальных районов и прочие автотранспортные средства связана с тем, чтобы повысить достоверность описания их движения. Так, например, маршрутные автобусы /троллейбусы движутся по определенному маршруту и имеют определенные временные устои, которые пытаются выполнять. В периоды пробок по определенным маршрутам могут реализоваться отклонения, что и учитывает модель. Такси обычно группируются по районам, при этом функция распределения строится по данным парков и разыгрывается по методу Монте-Карло как по времени, так и по набору маршрутов. Служебные автомобили различных ведомств и организаций, как правило, имеют определенные места парковок и для ряда объектов можно установить функцию распределения, а для остальных применить на первых порах равномерную функцию по маршрутам и т.д.
Формирование ячеек указанных типов необходимо для соответствия с детальным планом города. Так, например, ячейки, которые заняты под парковку отражают детализацию дворов и специально организованных парковок. Ячейки движения могут на какой-то отрезок времени быть объявлены ячейками парковки, в частности, если это конечная точка маршрута или происходит авария. Нахождение в ячейках светофорах запрещено, и правило прохода через эти ячейки определяется специальным алгоритмом. Ячейки, где движение запрещено, нужны для создания непрерывной картины города при видеоизображении, а также они являются возможным материалом для создания других ячеек. Новые ячейки, которые могут создаваться за счет новых управленческих решений, нужны, например, при формировании новой развязки.
Формирование начальной функции распределения автотранспорта трудоемкая задача, но для нее имеются все данные и возможности уточнений и изменений в процессе эксплуатации модели. В соответствии с общим алгоритмом большое количество объектов должно быть помещено в ячейки в соответствии с начальным распределением. Занимаются места на парковках, части ячеек движения и на въездах в город. Так как задача имеет временную зависимость, то предполагается за нулевую точку отсчета принять, скажем, 3 часа ночи и движением в это время пренебрежем, так как очевидно, что это не влияет на основные характеристики движения, которые и характеризуют транспортную систему.
На фиг. проиллюстрирован способ, который позволяет прогнозировать перемещения транспортных средств в потоке применительно к мегаполису и может служить примером конкретной реализации предлагаемого способа. Общая схема расчета транспортных средств подразумевает временной расчет движения объектов (авто) в рамках определенным образом выбранной сетки, ячейки которой имеют градацию и определенные свойства.
Этап 1. Осуществляют структурную разбивку транспортного потока на различные подсистемы по типам маршрутов и правилам движения. Объекты движения делятся на: грузовой автотранспорт, легковой автотранспорт, автобусы, такси, служебные автомобили различных организаций и не отнесенные к определенному типу прочие автотранспортные средства. Кроме того, грузовой автотранспорт подразделяют на внутренний и внешний транспорт, а легковой - на транспорт, въезжающий в мегаполис и личный легковой транспорт.
Этап 2. В соответствии с детальным планом города строят сетку, однозначным образом связанную с геометрией города.
Этап 3. Формируют ячейки следующих типов:
- ячейки движения, т.е. ячейки, в которых может находиться объект и объект планирует двигаться дальше в соответствии со своим маршрутом. Объект точно знает, в какую следующую ячейку он хочет попасть и каковы правила попадания. Это приближение наиболее точно в условиях пробок;
- ячейки парковки, т.е. те ячейки, которые заняты под парковку, особенно это относится к дворам и специально организованным парковкам. Ячейки движения могут на какой-то отрезок времени быть объявлены ячейками парковки, в частности, если это конечная точка маршрута или происходит авария. Ячейки движения создаются в рамках полосы движения и имеют в длину определенный размер, обеспечивающий размещение в нем легкового транспортного средства;
- ячейки светофоры. Нахождение в этих ячейках запрещено и правило прохода через эти ячейки определяется специальным алгоритмом;
- ячейки, где движение запрещено. Эти ячейки нужны для создания непрерывной картины города при видеоизображении, а также они являются возможным материалом для создания ячеек первых трех типов;
- новые ячейки, которые могут создаваться за счет новых управленческих решений (скажем, новая развязка);
- ячейки парковки имеют конкретную нумерацию и подразделяются на легковые и грузовые (автобусные).
Этап 4. Создают базу данных с параметрами ячеек. Далее отметим параметры, которые имеет каждая ячейка:
- номер ячейки, который однозначно идентифицирует ее на карте города;
- номер ячейки, в которую может перейти объект (сопряженная ячейка);
- заняты ячейки или нет (два параметра);
- для ячеек, пограничных с ячейками светофорами, хранится информация, закрыт светофор или нет. При переходе через светофор должно быть два условия: открыт светофор и свободна ячейка, куда переходит объект.
В случае, если существует более одного претендента на переход в вакантную ячейку, действует алгоритм очередности.
К примеру, ячейки парковки имеют следующие параметры:
- номер ячейки;
- «свободна - занята»;
- номер ячейки, куда может переходить объект при получении приказа на начало движения;
-алгоритм перемещения, если в ячейку перехода есть претендент (как правило, номер ячейки конкурента и одноразовая уступка при наличии вакансии).
Ячейки светофоры имеют:
- информацию, сколько шагов по времени закрыто и для каких ячеек.
Остальные ячейки имеют номера для создания геометрической картины или в случае новых пополняют имеющиеся выше подсистемы ячеек.
Этап 5. Формируют начальное распределение транспортного потока. За нулевую точку отсчета принимают три часа ночи. В соответствии со структурной разбивкой транспортного потока каждому объекту выбирают определенную ячейку сетки.
Этап 6. Задают каждому объекту маршрут и время его начала с определенной ячейки сетки. Расчет имеет суточную продолжительность. В соответствии со структурной разбивкой транспортного потока на различные подсистемы по типам маршрутов и правилам движения в каждой подсистеме формируют функцию распределения, которая позволяет (иногда используя вероятностные зависимости) задать маршрут. Шаг расчета выбирается как деление размера ячейки на максимальную разрешенную скорость, при этом переход в следующую ячейку осуществляется по определенному алгоритму. В основе алгоритма находится анализ таких факторов как состояние ячейки, в которую планирует перейти объект, состояние светофорной ячейки, возможность попасть в аварию. Попадание в аварию объекта определяется в соответствии с функцией распределения аварийных случаев, которая учитывает годовую статистику с учетом факторов погоды. Таким образом, на каждом временном шаге известно количество аварий, которое должно произойти, и оно разыгрывается в соответствии с данными по плотности аварий в городе. При этом ячейки, в которых произошли аварии (как минимум два объекта), объявляются ячейками парковки на определенное время, а также близлежащие ячейки с ними по мере освобождения их на последующих шагах по времени. В этом случае, когда последующий объект натыкается на аварийную ячейку по своему маршруту, ему предоставляется право при наличии нескольких полос видоизменить маршрут для объезда, используя те же алгоритмы перехода в последующие ячейки.
Этап 7. Обновляют конфигурацию модели путем перемещения объектов по сетке.
Алгоритм перехода из одной ячейки в другую прост. На следующем временном шаге, если ячейка пуста, то объект может переместиться в нее, если нет претендентов на ее занятие другим объектом. Если этот претендент уже ждал один шаг, то он занимает эту ячейку и наш наблюдаемый объект вынужден перейти в эту ячейку только на следующем временном шаге. При всей этой процедуре необходимо учитывать также состояние светофорной ячейки, если она есть на пути перехода и запрещает переход в последующую ячейку в течение того времени, когда светофор закрыт.
Таким образом, если наблюдать какой-либо объект из определенной подсистемы, его история жизни будет состоять из следующей последовательности. В какой-то момент времени в ячейку, где он находится, приходит приказ к началу движения в определенную точку, причем маршрут рассчитывается и представляет собой определенную последовательность номеров ячеек. По этому маршруту есть определенное количество светофорных ячеек, режим работы которых задан. В процессе пути ряд ячеек может быть занят из-за аварий или парковки другим объектом. В этом случае представляется объезд, т.е. эту ячейку или ряд ячеек заменяют на другие. Переход из одной ячейки в другую определяется алгоритмом, описанным выше. После прихода в конечную ячейку маршрута объект может стать на парковку до следующей команды (в ряде случаев возвращение обратно) и завершает свой жизненный цикл либо выходом из системы через шлюзы, либо возвращаясь на место парковки на ночь.
Таким образом, каждое транспортное средство в течение суток имеет набор маршрутов с начальной и конечной точкой. В течение расчета проводится около 10000 шагов по времени с огромным количеством авто. Предлагаемый способ на основе описанной выше модели может широко использоваться как при анализе конкретных решений, так и для выработки обоснованных стратегий развития.
Изобретение относится к способам управления автотранспортными потоками, а именно к способу прогнозирования перемещений объектов движения в мегаполисе путем многофакторного моделирования перемещаемого транспортного потока. Способ включает структурную разбивку транспортного потока на различные типы объектов движения, построение привязанной к реальной геометрии города улично-дорожной сетки, разбивку этой сетки на ячейки, оценку данных по перемещению объекта движения по ячейкам, заданием каждому объекту маршрута и времени начала маршрута с определенной ячейки сетки, а также обновление конфигурации модели. Технический результат заключается в повышении достоверности и точности прогнозирования. 1 ил.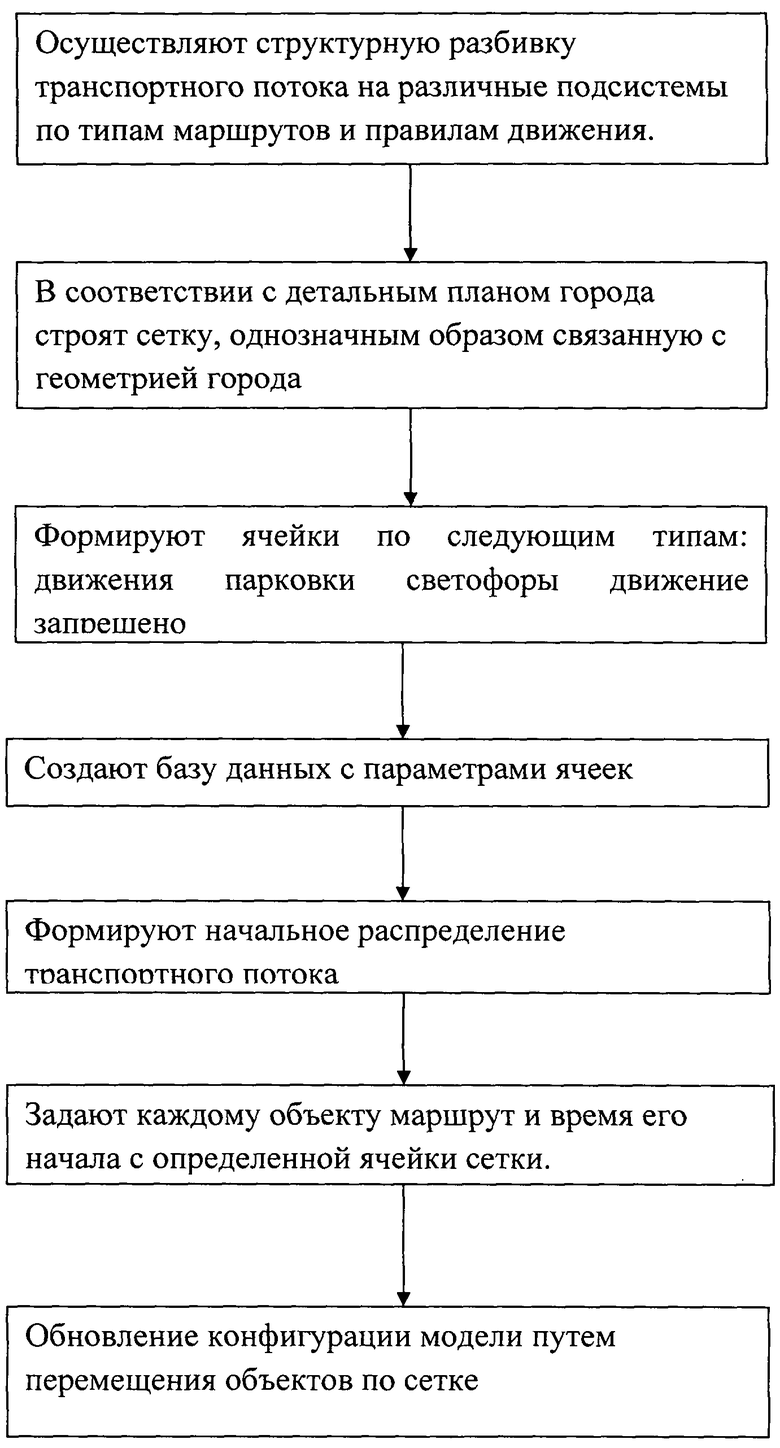
Способ прогнозирования перемещений объектов движения в мегаполисе путем многофакторного моделирования перемещаемого транспортного потока, включающий структурную разбивку транспортного потока на различные типы объектов движения, к которым относятся грузовой автотранспорт, легковой автотранспорт и автобусы, построение привязанной к реальной геометрии города улично-дорожной сетки (УДС) с разбивкой ее на ячейки, параметры каждой из которых обеспечивают размещение в ней легкового транспортного средства, оценивают данные по перемещению объекта движения в другую ячейку, которые связаны с состоянием ячейки, типом объекта движения, правилами движения и реагирования на сигналы светофора, нерегулируемые перекрестки и пешеходные переходы с последующим заданием каждому объекту в рамках сетки маршрута и времени его начала с определенной ячейки в соответствии с начальным распределением объектов движения по ячейкам сетки, обновление конфигурации модели путем перемещения объектов по сетке, отличающийся тем, что для каждого транспортного средства определяют набор маршрутов с начальной и конечной точкой в течение суток, для чего при осуществлении структурной разбивки транспортного потока учитывают также такси, служебные автомобили различных организаций и не отнесенные к определенному типу прочие автотранспортные средства, кроме того грузовой автотранспорт подразделяют на внутренний и внешний транспорт, а легковой - на транспорт, въезжающий в мегаполис, и личный легковой транспорт, осуществляют классификацию ячеек, которые подразделяют на ячейки движения, в которых может находиться объект и объект планирует двигаться дальше в соответствии со своим маршрутом, ячейки парковки, которые заняты под парковку, ячейки светофоры, нахождение в которых запрещено, ячейки, где движение запрещено и новые ячейки, которые создают путем управленческих решений, при этом ячейки движения временно могут быть объявлены ячейками парковки, далее создают базы данных по ячейкам с описанием их параметров, в которые включают номер ячейки, однозначно идентифицирующий ее на карте города, номер сопряженной ячейки, в которую может перейти объект движения, информацию о том, занята или свободна ячейка, и алгоритм перемещения, для ячеек светофоров включают информацию о том, сколько шагов по времени она закрыта и для каких ячеек, а для ячеек, пограничных с ячейками светофорами, включают информацию о закрытии или открытии светофора, оценку данных, связанных с передвижением осуществляют по параметрам ячеек, с помощью которых определяют правила нахождения в них объектов движения, формируя функцию распределения для каждого типа объекта движения в зависимости от времени суток, используя входные данные и вероятностные оценки на основе метода Монте-Карло, кроме этого учитывают возможность попадания объекта движения в аварию в соответствии с функцией распределения аварийных случаев, которую формируют с учетом годовой статистики и фактора погоды, причем маршрут объекта движения представляют в виде определенной последовательности номеров ячеек, при этом в расчете за нулевую точку принимают время, когда движение имеет минимальное напряжение, выбор шага обновления по времени осуществляют, поделив размер ячейки на максимально разрешенную скорость в мегаполисе.
| СПОСОБЫ ПРЕДСКАЗАНИЯ ПУНКТОВ НАЗНАЧЕНИЯ ИЗ ЧАСТИЧНЫХ ТРАЕКТОРИЙ, ПРИМЕНЯЮЩИЕ СПОСОБЫ МОДЕЛИРОВАНИЯ ОТКРЫТОГО И ЗАМКНУТОГО МИРА | 2006 |
|
RU2406158C2 |
| DE 102010041513 A1, 29.03.2012 | |||
| УСТРОЙСТВО РАСПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О ДВИЖЕНИИ ТРАНСПОРТА | 2007 |
|
RU2411587C2 |
| Устройство для контроля состояния сосудов высокого давления | 1983 |
|
SU1174843A1 |

