Изобретение относится к области регулирования движения дорожного транспорта, а именно к системам и способам идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, и может быть использовано на спецтранспорте или пассажирском транспорте для фиксирования нарушений ПДД, связанных с выездом на выделенную полосу, в процессе движения пассажирского или спецтранспорта на всем протяжении его пути.
Отсутствие культуры и дисциплины водителей, особенно в случаях необходимости своевременно пропустить транспорт со спецсигналом на выделенной полосе - может стоить жизни, например из-за позднего прибытия реанимобиля и т.п. Поскольку доказать вину не уступившего водителя, также как и вину водителя, выехавшего на выделенную полосу движения общественного транспорта и создавшего препятствие для проезда общественного транспорта, достаточно сложно, отсутствует элемент неотвратимости наказания, что и подпитывает низкий уровень дисциплины на дорогах.
Известны варианты фиксации таких нарушений, связанных с выездом на выделенную полосу, со стационарных постов видеонаблюдения, которые оборудованы одной или двумя камерами видеонаблюдения (возможно применение поворотных камер). Такие системы постоянно контролируют участок дороги длиной от 50 до 200 м, с помощью наблюдателя или автоматически распознают номер нарушителя и регистрируют на данном участке нарушения. Однако эффективность таких систем невелика вследствие их стационарности - они способны контролировать только незначительный участок дороги.
Наиболее близким к предложенному изобретению является способ идентификации транспортных средств, описанный в KR 100812397 (В1), в котором предлагается установка фотокамеры, снимающей изображение впередиидущего транспортного средства, далее регистрационный знак этого транспортного средства распознают, определяют, является ли это транспортное средство общественным транспортом либо этот нарушитель - частное транспортное средство. Данный способ выбран в качестве прототипа изобретения.
Недостатком способа прототипа является его недостаточная универсальность, а именно то, что он предназначен для фиксирования нарушений при движении только по полосе, выделенной для общественного транспорта. Кроме того, предложенный способ не предусматривает применения на полосах, выделенных для преимущественного движения общественного транспорта, где также возможен проезд, и необщественного транспорта, при условии, что данное транспортное средство не создает помех общественному транспорту и производит перестроение.
Задачей предложенного изобретения является создание системы и способа идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, с улучшенной универсальностью за счет идентификации транспортных средств, движущихся по любой выделенной полосе, и за счет распознавания частных транспортных средств, движущихся по выделенной полосе в рамках правил при совершении маневра перестроения через выделенную полосу в разрешенных для этого местах.
Предложенные система и способ также позволяют производить учет как взаимного расстояния между транспортными средствами, так и длительности или протяженности участка, на котором создана помеха на выделенной полосе, что позволяет, при наличии законодательного регламента, учитывать или не учитывать данную ситуацию как нарушение, за счет постоянной видеозаписи дорожной ситуации на выделенной полосе перед пассажирским или специальным транспортным средством, на котором установлена предложенная система.
Еще одно преимущество предложенного изобретения заключается в его улучшенной эффективности. При обычном использовании выделенной полосы (в соответствии с правилами дорожного движения) дорога используется неэффективно. В большинстве случаев она пустует при напряженном движении по остальным полосам. Использование предложенного изобретения позволяет оптимизировать движение: допускать выезд на выделенную полосу частных транспортных средств в то время, когда нет автобусов, за счет фиксации транспортного средства нарушителя, не уступившего выделенную полосу подъехавшему пассажирскому или специальному транспортному средству, вручную водителем данного пассажирского или специального транспортного средства, на котором установлена предложенная система. При этом водители частных транспортных средств, находящихся на выделенной полосе, должны самостоятельно следить за появлением сзади общественного или специального транспортного средства и своевременно уступать ему полосу (по аналогии с существующим правилом поведения водителей при приближении автомобиля со спецсигналом: при приближении такого автомобиля, ему освобождают занимаемую полосу).
Предложенная система предназначена для установки на спецтранспорте или пассажирском транспорте, что позволяет фиксировать нарушения в процессе движения пассажирского или спецтранспорта на всем протяжении пути, что намного эффективнее «точечных» систем. Кроме этого, так как при установке на транспортном средстве нет необходимости наблюдать дальнюю зону обзора (до 50-200 м как у «точечных» систем), причем с высокой детализацией (для распознавания номера), а достаточно фиксировать только ближнюю зону обзора (5-20 м), достаточную для того, чтобы зафиксировать автомобиль (и его регистрационный знак) непосредственно создавший препятствие для движения спецтранспорта (при включенных поблесковых маячках и сирене) или для общественного транспорта на выделенной полосе, а значит требования к оптике и видеокамере значительно ниже, что существенно удешевляет предложенную систему и способ.
Поставленная задача решена путем создания системы идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, содержащей установленные на патрулирующем транспортном средстве видеорегистратор, соединенный с видеобуфером устройства хранения данных, отличающейся тем, что она также содержит блок анализа изображения, соединенный с видеорегистратором, устройством хранения данных и модулем принятия решения и фиксации, соединенный с видеорегистратором и блоком управления и инициализации, соединенным с устройством хранения данных, которое также содержит буфер распознанных номеров, причем видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных; блок анализа изображения выполнен с возможностью анализа видеоизображения и отдельных фотокадров, при этом выделения и распознавания дорожной разметки и дорожных знаков, впередиидущих транспортных средств и их данных, а также с возможностью передачи распознанных данных в модуль принятия решения и фиксации; блок управления и инициализации выполнен с возможностью получения выбранных пользователем внешних условий определения незаконного вторжения на выделенную полосу, а именно условия автоматического анализа или анализа вручную, а также с возможностью передачи выбранных пользователем внешних условий в модуль принятия решения и фиксации, который выполнен с возможностью определения факта движения патрулирующего транспортного средства по выделенной полосе автоматически путем анализа предустановленных координат или дорожной разметки и дорожных знаков, обозначающих выделенную полосу, а также с возможностью определения факта незаконного вторжения впередиидущего транспортного средства на выделенную полосу либо автоматически путем анализа набора признаков, включающего предустановленные координаты или дорожную разметку и дорожные знаки, обозначающие разрешенные/запрещенные для движения частного транспорта участки выделенной полосы, государственный регистрационный номер впередиидущего транспортного средства, обозначающий его тип (частное или нет), световые сигналы левого или правого поворота, обозначающие намерение впередиидущего транспортного средства покинуть выделенную полосу на ее участке, допустимом для перестроения, либо вручную по сигналу водителя патрулирующего транспортного средства; видеобуфер и буфер распознанных номеров выполнены с возможностью циклической записи в видеоданных, отдельных данных, включая временные метки, и метаданных, поступающих с видеорегистратора, а также с блоков и модулей системы.
В предпочтительном варианте осуществления системы патрулирующее транспортное средство выбрано из набора транспортных средств, содержащего специальное транспортное средство (полицейский автомобиль, автомобиль скорой помощи, пожарный автомобиль) или общественное транспортное средство (автобус, троллейбус, трамвай).
В предпочтительном варианте осуществления системы устройство хранения данных выбрано из набора устройств хранения данных, содержащего флеш-память и жесткий диск.
В предпочтительном варианте осуществления системы видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора, составляющей 5-20 метров от патрулирующего транспортного средства.
В предпочтительном варианте осуществления системы видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных, выбранных из набора данных, включающего в себя цвет, государственный регистрационный номер, скорость движения, время движения без изменения полосы, включенные световые указатели левого или правого поворота.
В предпочтительном варианте осуществления система также содержит навигационный Глонасс/GPS модуль, соединенный с модулем принятия решения и фиксации и с устройством хранения данных и выполненный с возможностью определения и протоколирования текущих координат патрулирующего транспортного средства а также с возможностью контроля маршрута патрулирующего транспортного средства.
В предпочтительном варианте осуществления система также содержит удаленный центр обработки и обеспечения безопасности движения, соединенный с устройством хранения данных по каналу беспроводной связи и выполненный с возможностью считывания данных с устройства хранения данных.
В предпочтительном варианте осуществления системы она запускается автоматически при въезде на выделенную полосу, при этом запуск системы осуществляется по координатам начала и конца выделенной полосы.
В предпочтительном варианте осуществления системы устройство хранения данных выполнено с возможностью постоянной циклической записи временных меток и данных с видеорегистратора, а также блоков и модулей системы.
Поставленная задача решена также путем создания способа идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, в системе, содержащей установленные на патрулирующем транспортном средстве видеорегистратор, устройство хранения данных с видеобуфером и буфером распознанных номеров, блок анализа изображения, модуль принятия решения и фиксации и блок управления и инициализации, отличающегося тем, что формируют посредством видеорегистратора видеоизображение и отдельные фотокадры передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных; анализируют посредством блока анализа изображения видеоизображение и отдельные фотокадры, при этом выделяют и распознают дорожную разметку и дорожные знаки, а также впередиидущие транспортные средства и их данные, и передают распознанные данные в модуль принятия решения и фиксации; получают посредством блока управления и инициализации выбранные пользователем внешние условия определения незаконного вторжения на выделенную полосу, а именно условия автоматического анализа или анализа вручную, а также передают выбранные пользователем внешние условия в модуль принятия решения и фиксации, посредством которого определяют факт движения патрулирующего транспортного средства по выделенной полосе автоматически путем анализа предустановленных координат или дорожной разметки и дорожных знаков, обозначающих выделенную полосу, а также определяют факт незаконного вторжения впередиидущего транспортного средства на выделенную полосу, либо автоматически путем анализа набора признаков, включающего предустановленные координаты или дорожную разметку и дорожные знаки, обозначающие разрешенные/запрещенные для движения частного транспорта участки выделенной полосы, государственный регистрационный номер впередиидущего транспортного средства, обозначающий его тип (частное или нет), световые сигналы левого или правого поворота, обозначающие намерение впередиидущего транспортного средства покинуть выделенную полосу на ее участке, допустимом для перестроения, либо вручную по сигналу водителя патрулирующего транспортного средства; записывают в видеобуфер и буфер распознанных номеров видеоданные, отдельные данные и метаданные, поступающие с видеорегистратора, а также с блоков и модулей системы.
В предпочтительном варианте осуществления способа формируют посредством видеорегистратора, установленного на патрулирующем транспортном средстве, выбранном из набора транспортных средств, содержащего специальное транспортное средство (полицейский автомобиль, автомобиль скорой помощи, пожарный автомобиль) или общественное транспортное средство (автобус, троллейбус, трамвай), видеоизображение и отдельные фотокадры передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных.
В предпочтительном варианте осуществления способа формируют посредством видеорегистратора, установленного на патрулирующем транспортном средстве, видеоизображение и отдельные фотокадры передней ближней зоны обзора, составляющей 5-20 метров от патрулирующего транспортного средства.
В предпочтительном варианте осуществления способа формируют посредством видеорегистратора, установленного на патрулирующем транспортном средстве, видеоизображение и отдельные фотокадры передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных, выбранных из набора данных, включающего в себя цвет, государственный регистрационный номер, скорость движения, время движения без изменения полосы, включенные световые указатели левого или правого поворота.
В предпочтительном варианте осуществления способа система также содержит соединенный с модулем принятия решения и фиксации и с устройством хранения данных навигационный Глонасс/GPS модуль, посредством которого определяют и протоколируют текущие координаты патрулирующего транспортного средства, а также контролируют маршрут патрулирующего транспортного средства.
В предпочтительном варианте осуществления способа система также содержит удаленный центр обработки и обеспечения безопасности движения, посредством которого по каналу беспроводной связи считывают данные с устройства хранения данных.
В предпочтительном варианте осуществления способа систему запускают автоматически при въезде на выделенную полосу, при этом запуск системы осуществляют по координатам начала и конца выделенной полосы.
В предпочтительном варианте осуществления способа постоянно циклически записывают в видеобуфер и буфер распознанных номеров видеоданные, отдельные данные, включая временные метки, и метаданные, поступающие с видеорегистратора, а также с блоков и модулей системы.
Для лучшего понимания предложенной полезной модели далее приводится ее подробное описание с соответствующими графическими материалами.
Для лучшего понимания предложенного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
Фиг. Схема варианта выполнения системы идентификации транспортных средств, противоправно вторгшихся на выделенную полосу согласно изобретению.
Элементы:
видеорегистратор - 1;
устройство хранения данных - 2;
видеобуфер - 3;
буфер распознанных номеров - 4;
блок анализа изображения - 5;
модуль принятия решения и фиксации - 6;
блок управления и инициализации - 7;
Глонасс/GPS модуль - 8.
Рассмотрим функционирование варианта выполнения предложенных системы и способа идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, показанного на фигуре.
Предложенная система идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, содержит установленные на патрулирующем транспортном средстве видеорегистратор 1, устройство 2 хранения данных с видеобуфером 3 и буфером 4 распознанных номеров, блок 5 анализа изображения, модуль 6 принятия решения и фиксации, блок 7 управления и инициализации и Глонасс/GPS модуль 8.
Система работает следующим образом. Сначала формируют посредством видеорегистратора 1 видеоизображение и отдельные фотокадры передней ближней зоны обзора патрулирующего транспортного средства с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных. Затем анализируют посредством блока 5 анализа изображения видеоизображение и отдельные фотокадры, при этом выделяют и распознают дорожную разметку и дорожные знаки, а также впередиидущие транспортные средства и их данные, и передают распознанные данные в модуль 6 принятия решения и фиксации. Получают посредством блока 7 управления и инициализации выбранные пользователем внешние условия определения незаконного вторжения на выделенную полосу, а именно условия автоматического анализа или анализа вручную, а также передают выбранные пользователем внешние условия в модуль 6 принятия решения и фиксации. Посредством модуля 6 принятия решения и фиксации определяют факт движения патрулирующего транспортного средства по выделенной полосе автоматически путем анализа предустановленных координат или дорожной разметки и дорожных знаков, обозначающих выделенную полосу, а также определяют факт незаконного вторжения впередиидущего транспортного средства на выделенную полосу, либо автоматически путем анализа набора признаков, включающего предустановленные координаты или дорожную разметку и дорожные знаки, обозначающие разрешенные/запрещенные для движения частного транспорта участки выделенной полосы, государственный регистрационный номер впередиидущего транспортного средства, обозначающий его тип (частное или нет), световые сигналы левого или правого поворота, обозначающие намерение впередиидущего транспортного средства покинуть выделенную полосу на ее участке, допустимом для перестроения, либо вручную по сигналу водителя патрулирующего транспортного средства. Записывают в видеобуфер 3 и буфер 4 распознанных номеров видеоданные, отдельные данные и метаданные, поступающие с видеорегистратора, а также с блоков и модулей системы. Посредством навигационного Глонасс/GPS модуля определяют и протоколируют текущие координаты патрулирующего транспортного средства, а также контролируют маршрут патрулирующего транспортного средства.
Далее приведено описание работы предложенных системы и способа в других возможных вариантах выполнения. Посредством видеорегистратора 1 фиксируют зону непосредственно перед движущимся патрульным транспортным средством (общественным транспортным средством или спецтранспортом) и сохраняют видеоданные в видеоархив в видеобуфере 3 (также как и в известных видеорегистраторах). В случае выделения блоком 5 анализа изображения любого впередиидущего транспортного средства в ближней зоне обзора (5-20 метров от патрулирующего транспортного средства) посредством модуля 6 принятия решения и фиксации распознают регистрационный номер и тип впередиидущего транспортного средства (общественный транспорт, спецтранспорт и т.д.). При выявлении нарушения посредством блока 6 принятия решения и фиксации автоматически либо непосредственно водителем (например, посредством нажатия кнопки), формируют карточку нарушения, производят сохранение видеофрагмента, кадров с четко различимым номером нарушителя и сопровождающей информации (время, координаты глонасс-GPS) в отдельном архиве в видеобуфере 3 и буфере распознанных номеров 4. В дальнейшем эту информацию в качестве доказательной базы передают в центр обеспечения безопасности дорожного движения (или другой уполномоченный центр обработки данных) для последующего анализа и принятия решения о мерах административного воздействия. Передача информации возможна как по беспроводным каналам связи (например, 3G сетям, Wi-Fi в зоне стоянок и пр.), так и путем непосредственной передачи устройства 2 хранения данных, выполненного в виде съемного носителя (например, флеш-памяти и жесткого диска).
Хотя указанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.
Изобретение относится к области регулирования движения дорожного транспорта, а именно к системам и способам идентификации транспортных средств, противоправно вторгшихся на выделенную полосу. Система состоит из видеорегистратора, устройства хранения данных, блока анализа изображения, блока управления и инициализации, модуля принятия решения и фиксации, а также глонасс/GPS модуля. Устройство хранения данных содержит видеобуфер и буфер распознанных номеров. Технический результат изобретения заключается в улучшении универсальности системы и способа идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, в учете взаимного расстояния между транспортными средствами, в учете длительности и протяженности участка, на котором создана помеха на выделенной полосе, а также в улучшении эффективности. 2 н. и 15 з.п. ф-лы, 1 ил.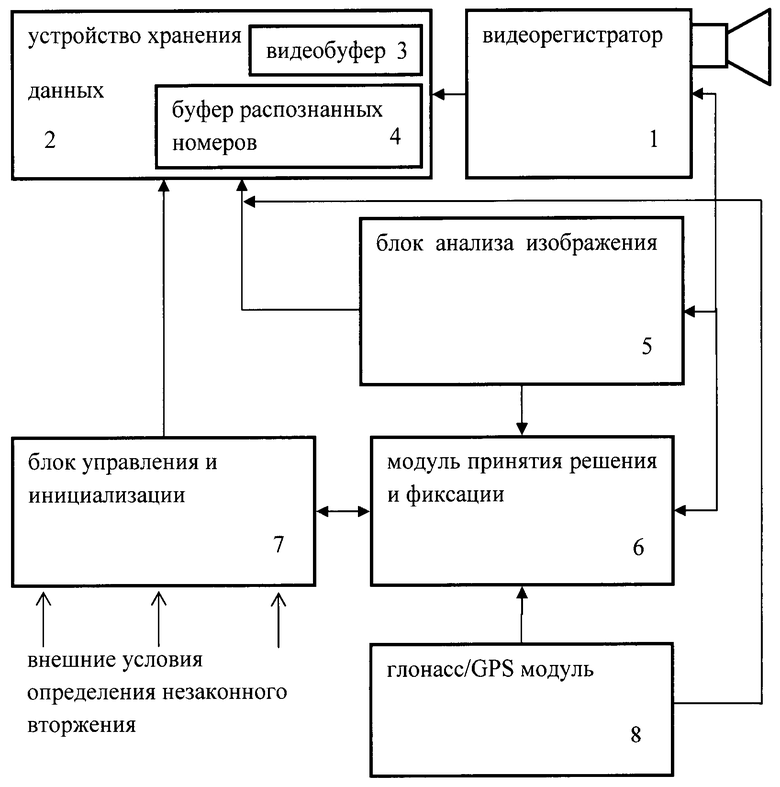
1. Система идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, содержащая установленные на патрулирующем транспортном средстве видеорегистратор, соединенный с видеобуфером устройства хранения данных, отличающаяся тем, что она также содержит блок анализа изображения, соединенный с видеорегистратором, устройством хранения данных и модулем принятия решения и фиксации, соединенный с видеорегистратором и блоком управления и инициализации, соединенным с устройством хранения данных, которое также содержит буфер распознанных номеров, причем видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных; блок анализа изображения выполнен с возможностью анализа видеоизображения и отдельных фотокадров, при этом выделения и распознавания дорожной разметки и дорожных знаков, впередиидущих транспортных средств и их данных, а также с возможностью передачи распознанных данных в модуль принятия решения и фиксации; блок управления и инициализации выполнен с возможностью получения выбранных пользователем внешних условий определения незаконного вторжения на выделенную полосу, а именно условия автоматического анализа или анализа вручную, а также с возможностью передачи выбранных пользователем внешних условий в модуль принятия решения и фиксации, который выполнен с возможностью определения факта движения патрулирующего транспортного средства по выделенной полосе автоматически путем анализа предустановленных координат или дорожной разметки и дорожных знаков, обозначающих выделенную полосу, а также с возможностью определения факта незаконного вторжения впередиидущего транспортного средства на выделенную полосу, либо автоматически путем анализа набора признаков, включающего предустановленные координаты или дорожную разметку и дорожные знаки, обозначающие разрешенные/запрещенные для движения частного транспорта участки выделенной полосы, государственный регистрационный номер впередиидущего транспортного средства, обозначающий его тип, а именно частное транспортное средство или нет, световые сигналы левого или правого поворота, обозначающие намерение впередиидущего транспортного средства покинуть выделенную полосу на ее участке, допустимом для перестроения, либо вручную по сигналу водителя патрулирующего транспортного средства; видеобуфер и буфер распознанных номеров выполнены с возможностью циклической записи в видеоданных, отдельных данных, включая временные метки, и метаданных, поступающих с видеорегистратора а также с блоков и модулей системы.
2. Система по п.1, отличающаяся тем, что патрулирующее транспортное средство выбрано из набора транспортных средств, содержащего специальное транспортное средство (полицейский автомобиль, автомобиль скорой помощи, пожарный автомобиль) или общественное транспортное средство (автобус, троллейбус, трамвай).
3. Система по п.1, отличающаяся тем, что устройство хранения данных выбрано из набора устройств хранения данных, содержащего флеш-память и жесткий диск.
4. Система по п.1, отличающаяся тем, что видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора, составляющей 5-20 метров от патрулирующего транспортного средства.
5. Система по п.1, отличающаяся тем, что видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных, выбранных из набора данных, включающего в себя цвет, государственный регистрационный номер, скорость движения, время движения без изменения полосы, включенные световые указатели левого или правого поворота.
6. Система по п.1, отличающаяся тем, что содержит навигационный Глонасс/GPS модуль, соединенный с модулем принятия решения и фиксации и с устройством хранения данных и выполненный с возможностью определения и протоколирования текущих координат патрулирующего транспортного средства, а также с возможностью контроля маршрута патрулирующего транспортного средства.
7. Система по п.1, отличающаяся тем, что содержит удаленный центр обработки и обеспечения безопасности движения, соединенный с устройством хранения данных по каналу беспроводной связи и выполненный с возможностью считывания данных с устройства хранения данных.
8. Система по п.1, отличающаяся тем, что она запускается автоматически при въезде на выделенную полосу, при этом запуск системы осуществляется по координатам начала и конца выделенной полосы.
9. Система по п.1, отличающаяся тем, что устройство хранения данных выполнено с возможностью постоянной циклической записи временных меток и данных с видеорегистратора, а также блоков и модулей системы.
10. Способ идентификации транспортных средств, противоправно вторгшихся на выделенную полосу, в системе, содержащей установленные на патрулирующем транспортном средстве видеорегистратор, устройство хранения данных с видеобуфером и буфером распознанных номеров, блок анализа изображения, модуль принятия решения и фиксации и блок управления и инициализации, отличающийся тем, что формируют посредством видеорегистратора видеоизображение и отдельные фотокадры передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных; анализируют посредством блока анализа изображения видеоизображение и отдельные фотокадры, при этом выделяют и распознают дорожную разметку и дорожные знаки, а также впередиидущие транспортные средства и их данные, и передают распознанные данные в модуль принятия решения и фиксации; получают посредством блока управления и инициализации выбранные пользователем внешние условия определения незаконного вторжения на выделенную полосу, а именно условия автоматического анализа или анализа вручную, а также передают выбранные пользователем внешние условия в модуль принятия решения и фиксации, посредством которого определяют факт движения патрулирующего транспортного средства по выделенной полосе автоматически путем анализа предустановленных координат или дорожной разметки и дорожных знаков, обозначающих выделенную полосу, а также определяют факт незаконного вторжения впередиидущего транспортного средства на выделенную полосу либо автоматически путем анализа набора признаков, включающего предустановленные координаты или дорожную разметку и дорожные знаки, обозначающие разрешенные/запрещенные для движения частного транспорта участки выделенной полосы, государственный регистрационный номер впередиидущего транспортного средства, обозначающий его тип, а именно частное транспортное средство или нет, световые сигналы левого или правого поворота, обозначающие намерение впередиидущего транспортного средства покинуть выделенную полосу на ее участке, допустимом для перестроения, либо вручную по сигналу водителя патрулирующего транспортного средства; записывают в видеобуфер и буфер распознанных номеров видеоданные, отдельные данные и метаданные, поступающие с видеорегистратора а также с блоков и модулей системы.
11. Способ по п.10, отличающийся тем, что формируют посредством видеорегистратора, установленного на патрулирующем транспортном средстве, выбранном из набора транспортных средств, содержащего специальное транспортное средство (полицейский автомобиль, автомобиль скорой помощи, пожарный автомобиль) или общественное транспортное средство (автобус, троллейбус, трамвай), видеоизображение и отдельные фотокадры передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных.
12. Способ по п.10, отличающийся тем, что формируют посредством видеорегистратора, установленного на патрулирующем транспортном средстве, видеоизображение и отдельные фотокадры передней ближней зоны обзора, составляющей 5-20 метров от патрулирующего транспортного средства.
13. Способ по п.10, отличающийся тем, что формируют посредством видеорегистратора, установленного на патрулирующем транспортном средстве, видеоизображение и отдельные фотокадры передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впередиидущих транспортных средств и их данных, выбранных из набора данных, включающего в себя цвет, государственный регистрационный номер, скорость движения, время движения без изменения полосы, включенные световые указатели левого или правого поворота.
14. Способ по п.10, отличающийся тем, что система также содержит соединенный с модулем принятия решения и фиксации и с устройством хранения данных навигационный Глонасс/GPS модуль, посредством которого определяют и протоколируют текущие координаты патрулирующего транспортного средства, а также контролируют маршрут патрулирующего транспортного средства.
15. Способ по п.10, отличающийся тем, что содержит удаленный центр обработки и обеспечения безопасности движения, посредством которого по каналу беспроводной связи считывают данные с устройства хранения данных.
16. Способ по п.10, отличающийся тем, что систему запускают автоматически при въезде на выделенную полосу, при этом запуск системы осуществляют по координатам начала и конца выделенной полосы.
17. Способ по п.10, отличающийся тем, что постоянно циклически записывают в видеобуфер и буфер распознанных номеров видеоданные, отдельные данные, включая временные метки, и метаданные, поступающие с видеорегистратора, а также с блоков и модулей системы.
| KR100812397 B1, 10.03.2008 | |||
| Многосекционный вертикальный режущий аппарат | 1959 |
|
SU127504A1 |
| Приспособление для испытания роторных систем в аэродинамической трубе | 1929 |
|
SU23115A1 |

