Изобретение относится к системам формирования сигнала спутниковой радионавигационной системы ГЛОНАСС, а именно к средствам управления передачей сигнала и его коррекции.
Из уровня техники известны способы формирования навигационного сигнала ГЛОНАСС, в частности способ формирования группового сигнала ГЛОНАСС (см. статья А.Ю.Середа, К.В. Детюк «Бортовой информационно-навигационный комплекс КА «ГЛОНАСС-К». Инженерный вестник Дона №3, том.21, 2012, стр.115-119, Издательство Северо-Кавказский научный центр высшей школы федерального государственного автономного образовательного учреждения высшего профессионального образования Южный федеральный университет) [1] при помощи которого осуществляется формирование и излучение навигационных сигналов с частотным разделением в диапазонах L1, L2, а именно сигналов с открытым доступом L1OF, L2OF, и сигналов с санкционированным доступом L1SF, L2SF, также при помощи него осуществляется формирование и излучение навигационного сигнала с кодовым подразделением в диапазоне L3, а именно сигнала с открытым доступом L3OC.
Недостатком указанного в качестве наиболее близкого аналога способа [1] является то, что при помощи него невозможно формировать и излучать сигнал с кодовым разделением в диапазонах L1, L2, что порождает дополнительные взаимные задержки между формируемыми сигналами с частотным и кодовым разделением, приводя к погрешности формирования сигнала.
Техническим результатом заявленного изобретения является обеспечение уменьшения погрешностей формирования сигнала посредством цифрового формирования групповых навигационных радиосигналов диапазонов L1, L2, которые излучаются одной антенной.
Технический результат достигается за счет создания способа формирования группового навигационного сигнала ГЛОНАСС включающего формирование навигационных сигналов с кодовым и частотным разделением в диапазонах L1, L2 и сигнала с кодовым разделением L3, их усиление и излучение через одну антенну, при котором сигналы в диапазонах L1, L2 с кодовым и частотным разделением суммируются на входе усилителя мощности, при этом образуется суммарный сигнал, имеющий амплитудную модуляцию, далее групповой сигнал синтезируют методом оптимального выравнивания, для этого все сигналы представляются в комплексной форме, далее сигнал преобразуется в выравнивателе, который исключает амплитудную модуляцию и в основе которого лежит преобразование комплексного сигнала в соответствии с определением функции sign:
далее конвертер переносит групповой сигнал на несущую частоту.
В частном варианте выполнения для комплексных чисел используют следующую аппроксимацию для вычисления 
где I и Q являются скалярными значениями действительной и мнимой частей комплексного числа x.
В другом частном варианте выполнения для комплексных чисел используют следующую аппроксимацию для вычисления

где I и Q являются скалярными значениями действительной и мнимой части комплексного числа x.
Заявленное изобретение проиллюстрировано следующими схемами:
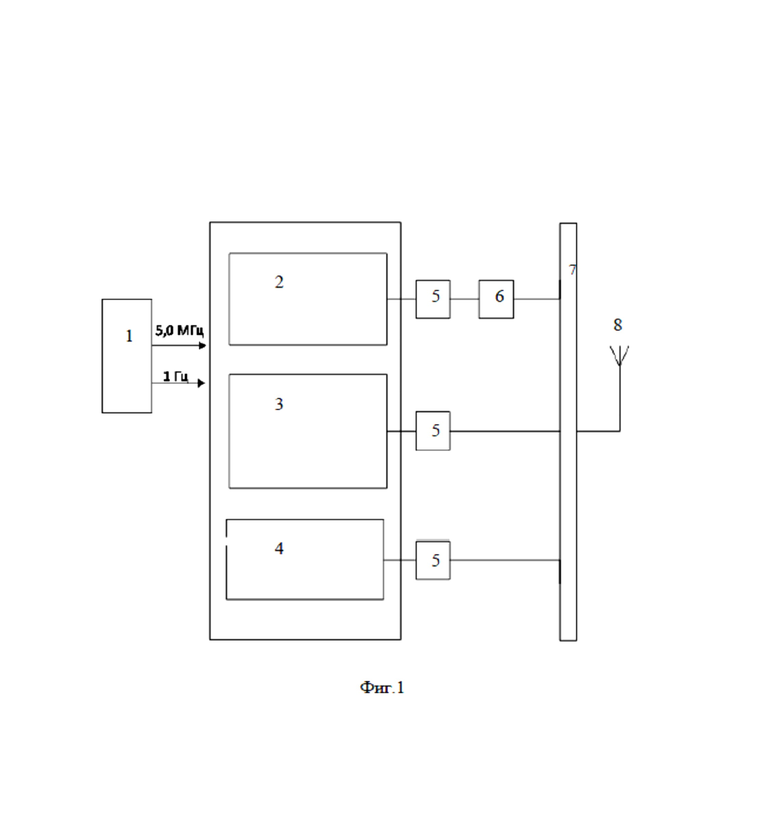
Фиг.1 –структурная схема формирователя группового навигационного сигнала ГЛОНАСС.
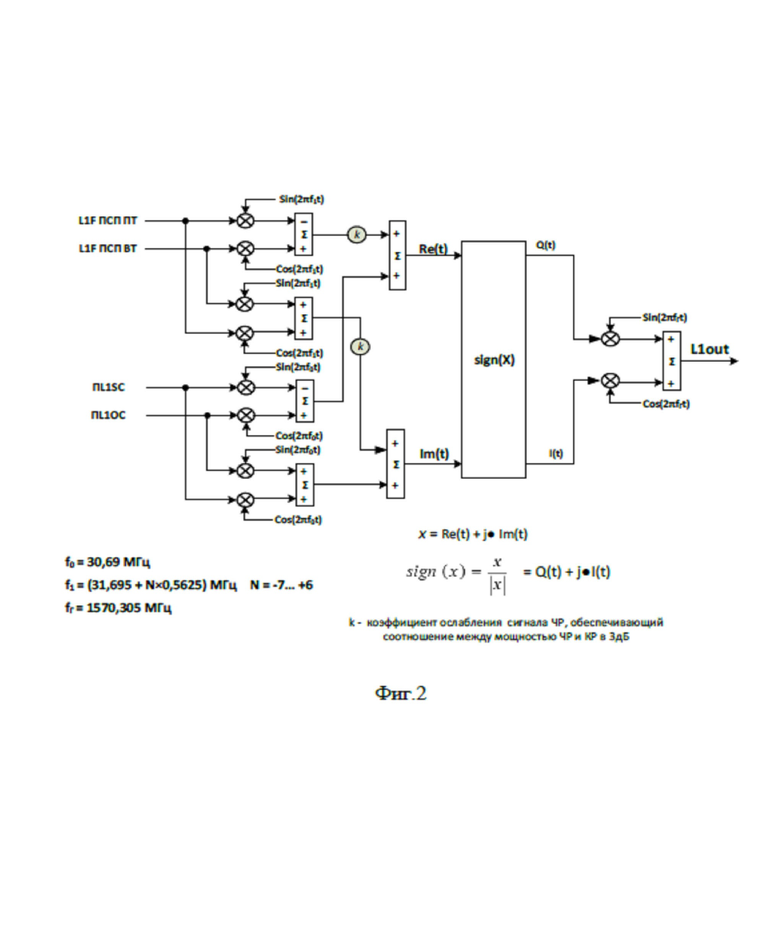
Фиг. 2–схема формирования выровненного сигнала.
На чертежах обозначено следующее:
1 - Бортовое синхронизирующее устройство;
2 - Цифровой формирователь навигационного радиосигнала L1 с частотным и кодовым разделениями;
3 - Цифровой формирователь навигационного радиосигнала L2 с частотным и кодовым разделениями;
4 - Цифровой формирователь навигационного радиосигнала L3 с кодовым разделениями;
5 - Усилитель мощности;
6 - Режекторный фильтр;
7 - Триплексер;
8 - Антенна.
Заявленный способ формирования группового навигационного сигнала ГЛОНАСС может быть реализован следующим образом.
Общая ширина полосы, в которой расположены все навигационные сигналы системы ГЛОНАСС, составляет более 400 МГц. Для формирования сигналов ГЛОНАСС предлагается формировать и усиливать групповые сигналы в каждом частотном диапазоне по отдельности.
Заявленный способ реализуется посредством излучения сигнала через одну антенну и базируется на принципиально новом методе формирования группового навигационного сигнала, объединяющего кодовые и частотные радиосигналы, характеризующегося неглубокой амплитудной модуляцией и незначительными энергетическими потерями (фиг.1).
Метод формирования группового радиосигнала, объединяющего сигналы с кодовым и частотным разделениями, рассматривается на примере радиосигнала диапазона L1 как наиболее сложного. Спектры сигналов перекрываются, поэтому сложить их на входе антенны после УМ без потерь мощности невозможно.
Для минимизации потерь сигналы суммируются на входе УМ. При этом образуется суммарный сигнал, имеющий амплитудную модуляцию. При отношении мощностей кодового и частотного сигналов 2:1 отношение максимальной амплитуды к минимальной будет равно 6. Следовательно, усилитель мощности должен иметь линейную амплитудную характеристику в диапазоне 16 дБ. Такой усилитель будет иметь КПД не лучше 20 процентов.
Теоретически показано, что синтезированный методом оптимального выравнивания суммарный групповой сигнал обеспечивает минимум потерь мощности формируемого сигнала. Групповой сигнал с неглубокой амплитудной модуляцией (АМ) может быть реализован ценой потери мощности не более 20%. Необходимо оценить, какие искажения и потери возникнут при аппаратной реализации метода на реальных схемах с учётом ограничений по быстродействию и разрядности цифроаналоговых устройств.
Основные операции происходят в преобразователе, который убирает АМ, и конвертере, который переносит групповой сигнал на несущую частоту. Все сигналы представляются в комплексной форме. Преобразователь, далее называемый выравнивателем, построенный на ПЛИС, должен свести АМ к минимуму, сохранив структуру обоих сигналов. Естественно, при этом возникнут комбинационные составляющие сигнала как следствие нелинейного преобразования. Спектр этих составляющих будет накладываться на спектр основных сигналов. Поэтому при усилении группового сигнала в УМ часть мощности перераспределится на них. Отсюда следует первый критерий оптимизации структуры выравнивателя – минимизация потерь. При преобразовании сигнала в конвертере может возникнуть второй источник потерь – зеркальный канал, который при невысокой частоте Fпч, может оказаться в полосе пропускания УМ. Поэтому структура конвертера в сочетании с выравнивателем должна обеспечить подавление зеркального канала не менее 23 дБ, чтобы потери на зеркальный канал были менее 1%.
После прохождения группового сигнала через УМ отношение может измениться, если после выравнивателя останется какая-то амплитудная модуляция. Степень изменения будет зависеть от глубины остаточной модуляции.
Рассмотрим схему формирования выровненного сигнала (фиг.2), в основе которой лежит преобразование комплексного сигнала x в соответствии с определением функции sign:
При реализации такой схемы выравнивания сигналов возможна проблема, связанная с вычислительной сложностью операции sign для комплексных чисел. Для этой цели предлагается использовать следующую аппроксимацию для вычисления
Величины I и Q являются скалярными значениями действительной и мнимой частей комплексного числа x. Таким образом, модуль этих величин определяется простой операцией отброса знака.
Если точности этой аппроксимации недостаточно, то значение
В этом случае вычислительную трудность будет представлять операция вычисления квадратного корня. Эту операцию, как и операцию деления, можно выполнять табличным способом.
Предложенный способ формирования группового навигационного сигнала ГЛОНАСС позволяет решить задачу использования метода цифрового формирования групповых навигационных радиосигналов диапазонов L1 и L2, которые можно излучать одной антенной, уменьшить погрешность измерений, повысить пропускную способность межспутниковой радиолинии, совершенствовать радиосигнал межспутниковой радиолинии и аппаратуру приёма сигнала, что обеспечивает повышение скорости передачи по радиолинии в несколько раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС | 2018 |
|
RU2686660C1 |
| СПОСОБ РАСШИРЕНИЯ ПОЛОСЫ НАВИГАЦИОННЫХ СИГНАЛОВ ГЛОНАСС | 2021 |
|
RU2791443C1 |
| Способ расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции | 2017 |
|
RU2663807C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| Бортовой информационно-навигационный комплекс | 2019 |
|
RU2706835C1 |
| Способ формирования сигнала спутниковой навигационной системы | 2016 |
|
RU2646315C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2110149C1 |
| Бортовой информационно-навигационный комплекс | 2017 |
|
RU2663680C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
Изобретение относится к системам формирования сигнала спутниковой радионавигационной системы ГЛОНАСС, а именно к средствам управления передачей и её коррекцией. Техническим результатом является уменьшение погрешностей формирования сигнала посредством цифрового формирования групповых навигационных радиосигналов диапазонов L1, L2, которые излучаются одной антенной. Способ формирования группового навигационного сигнала ГЛОНАСС включает формирование навигационных сигналов с кодовым и частотным разделением в диапазонах L1, L2 и сигнала с кодовым разделением L3, их усиление и излучение через одну антенну, при котором сигналы в диапазонах L1, L2 с кодовым и частотным разделением суммируются на входе усилителя мощности, при этом образуется суммарный сигнал, имеющий амплитудную модуляцию, далее групповой сигнал синтезируют методом оптимального выравнивания, для этого все сигналы представляются в комплексной форме, далее сигнал преобразуется в выравнивателе, который исключает амплитудную модуляцию и в основе которого лежит преобразование комплексного сигнала в соответствии с определением функции sign:

далее конвертер переносит групповой сигнал на несущую частоту. 2 з.п. ф-лы, 2 ил.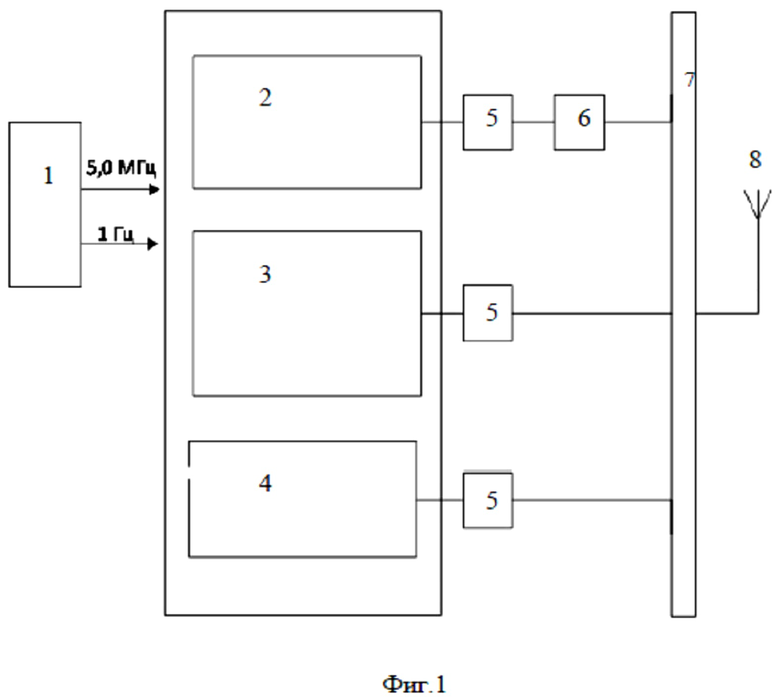
1. Способ формирования группового навигационного сигнала ГЛОНАСС, включающий формирование навигационных сигналов с кодовым и частотным разделением в диапазонах L1, L2 и сигнала с кодовым разделением L3, их усиление и излучение через одну антенну, при котором сигналы в диапазонах L1, L2 с кодовым и частотным разделением суммируются на входе усилителя мощности, при этом образуется суммарный сигнал, имеющий амплитудную модуляцию, далее групповой сигнал синтезируют методом оптимального выравнивания, для этого все сигналы представляются в комплексной форме, далее сигнал преобразуется в выравнивателе, который исключает амплитудную модуляцию и в основе которого лежит преобразование комплексного сигнала в соответствии с определением функции sign:

далее конвертер переносит групповой сигнал на несущую частоту.
2. Способ формирования группового навигационного сигнала ГЛОНАСС по п.1, отличающийся тем, что для комплексных чисел используют следующую аппроксимацию для вычисления 
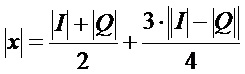
где I и Q являются скалярными значениями действительной и мнимой части комплексного числа x.
3. Способ формирования группового навигационного сигнала ГЛОНАСС по п.1, отличающийся тем, что для комплексных чисел используют следующую аппроксимацию для вычисления
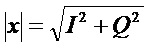
где I и Q являются скалярными значениями действительной и мнимой частей комплексного числа x.
| Универсальный съемник | 1961 |
|
SU155151A1 |
| US 2010073226 A1, 25.03.2010 | |||
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| US 2017139053 A1, 18.05.2017 | |||
| Способ повышения несущей способности армированного ледяного покрова | 1959 |
|
SU123976A1 |
| ПЕРЕДАЧА СИГНАЛОВ С ПЕРЕМЕННОЙ СКОРОСТЬЮ В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ С ИСПОЛЬЗОВАНИЕМ ГРУППОВОГО КОДИРОВАНИЯ | 1994 |
|
RU2142201C1 |

