Изобретение относится к выдвижному направляющему механизму для подвижных мебельных компонентов, в частности выдвижных ящиков. Предлагаемый выдвижной направляющий механизм имеет корпусный рельс, С-образный средний рельс и рельс скольжения, выполненный с возможностью закрепления на мебельном компоненте, причем С-образный средний рельс имеет обращенные внутрь ходовые дорожки тел качения для роликообразных тел качения, расположенных между средним рельсом и корпусным рельсом, и по меньшей мере две обращенные наружу и наклонные наружные ходовые дорожки тел качения, отделенные друг от друга горизонтальным сегментом среднего рельса, для дополнительных роликообразных тел качения, расположенных между средним рельсом и рельсом скольжения.
Такие выдвижные направляющие механизмы, имеющие корпусный рельс, средний рельс и рельс скольжения, то есть три направляющих рельса, перемещаемые относительно друг друга, дают возможность, среди прочего, устанавливать подвижный мебельный компонент, например, выдвижной ящик, также называемый отделением или носителем устройства, так что его можно плавно и полностью выдвинуть из мебельного корпуса. Выдвижные направляющие механизмы тремя направляющими рельсами называются также выдвижными механизмами полного выдвижения. В мебельной отрасли в качестве тел качения выдвижных направляющих механизмов используются шарики, катящиеся по ходовым дорожкам в виде полых профилей. Если в качестве тел качения используются шарики, то между шариком и ходовой дорожкой обычно имеется лишь точечный контакт, из-за которого ходовая дорожка может быть повреждена в случае сильной нагрузки на выдвижной направляющий механизм. Для выдвижных направляющих механизмов, предназначенных под повышенную нагрузку, целесообразно применять вышеупомянутые роликообразные тела качения, например, цилиндрические или бочкообразные, в которых по существу вся длина роликов используется для передачи усилия на ходовую поверхность, называемую также ходовой дорожкой.
Из документа DE 4204067 A1 известен выдвижной направляющий механизм полного выдвижения, имеющий три направляющих рельса, перемещаемых относительно друг друга, со средним С-образным рельсом и двумя обращенными внутрь и двумя обращенными наружу ходовыми дорожками тел качения, каждая для роликообразных тел качения. Ходовые дорожки тел качения, обращенные внутрь к корпусному рельсу, подобно ходовым дорожкам, обращенным наружу к рельсу скольжения, сформированы в парах наклонными друг относительно друга приблизительно на 90°. Направляющая тел качения такой геометрической конфигурации называется также призматической направляющей. Она позволяет, используя лишь две дорожки тел качения, как амортизировать действующую вертикально вниз силу, так и создать боковую направляющую. При этом выравнивание осей вращения тел качения, также с наклоном вследствие наклонного расположения ходовой дорожки тел качения, в случае большего диаметра тела качения, имеет результатом малое вертикальное расстояние между направляющими рельсами и, тем самым малую вертикальную высоту конструкции выдвижного направляющего механизма.
В выдвижном направляющем механизме из документа DE 4204067 A1 каждый из концевых сегментов направляющих рельсов изогнут так, что концевые поверхности роликообразных тел качения, по меньшей мере частично, закрыты. Тем самым в осевом направлении роликообразных тел качения также может достигаться передача сил между отдельными направляющими рельсами, что с одной стороны не позволяет среднему рельсу или рельсу скольжения подняться вверх с корпусного рельса, а с другой стороны - позволяет амортизировать, в определенной степени, опрокидывающий крутящий момент, действующий на направляющий рельс при выдвижении мебельного компонента. Однако, в случае тяжелых нагрузок, опрокидывающие крутящие моменты могут приводить к изгибу профилей направляющих рельсов вследствие сил, передаваемых по оси через тела качения, что ограничивает несущую способность выдвижного направляющего механизма.
Настоящее изобретение направлено на создание выдвижного направляющего механизма вышеуказанного типа, имеющего меньшую высоту конструкцию и способного как амортизировать высокий опрокидывающий крутящий момент, так и обеспечивать направление сильно нагруженных мебельных компонентов по всей траектории выдвижения.
Указанная задача решена посредством выдвижного направляющего механизма вышеуказанного типа, охарактеризованного совокупностью признаков, приведенных в независимом пункте прилагаемой формулы изобретения. Предпочтительные варианты осуществления и усовершенствования изобретения изложены в зависимых пунктах прилагаемой формулы изобретения.
В соответствии с изобретением, выдвижной направляющий механизм отличается тем, что на С-образном среднем рельсе сформирована свободная полка, которая частично охватывает корпусный рельс, причем на внутренней стороне данной полки сформирована дополнительная ходовая дорожка тел качения для роликовых тел качения, расположенных между средним рельсом и корпусным рельсом.
Роликообразные тела качения, расположенные между охватывающей полкой среднего рельса и корпусным рельсом, используются для передачи сил, действующих вверх на средний рельс, к корпусному рельсу. Такие силы проявляются, в частности, в выдвинутом выдвижном направляющем механизме, в виде опрокидывающего крутящего момента. В данном случае использование роликообразных тел качения позволяет распределять силы не только на точечной, но и по линейной зоне контакта между телом качения и ходовой дорожкой тел качения, тем самым давая возможность амортизации высокого опрокидывающего крутящего момента. Роликообразные тела качения или дополнительные роликообразные тела качения могут быть, например, цилиндрическими, бочкообразными, иглообразными или дискообразными.
Для достижения компактной высоты конструкции предпочтительно, чтобы вертикальное расстояние между горизонтальным сегментом среднего рельса и горизонтальным сегментом рельса скольжения, расположенным над горизонтальным сегментом, было меньше диаметра тел качения, перемещающихся по наклоненным наружу наружным ходовым дорожкам тел качения среднего рельса. Тем самым может быть достигнута исключительно малая высота конструкции призматической направляющей, сформированной между средним рельсом и рельсом скольжения.
В одном предпочтительном варианте осуществления выдвижного направляющего механизма ходовые дорожки тел качения выполнены в виде прямолинейных поверхностей. Такое исполнение позволяет использовать цилиндрические тела качения, которые имеют особенно длинную зону контакта по отношению к своему радиусу, В результате достигается высокая несущая способность при малой высоте конструкции.
В другом предпочтительном варианте осуществления выдвижного направляющего механизма корпусный рельс имеет горизонтальную ходовую стенку, имеющую по меньшей мере одну ориентированную вниз горизонтальную ходовую дорожку тел качения, при этом роликообразные тела качения расположены между дополнительной ходовой дорожкой тел качения, сформированной на полке среднего рельса, и сориентированной вниз горизонтальной ходовой дорожкой тел качения. Благодаря наличию на среднем рельсе ориентированной вниз горизонтальной ходовой дорожки тел качения, в случае действия на средний рельс опрокидывающего крутящего момента, направленная вниз сила передается перпендикулярно на оси качения роликообразных тел качения. Тем самым устранены силы, действующие по оси на тело качения и его опору.
В другом предпочтительном варианте осуществления выдвижного направляющего механизма корпусный рельс имеет вертикальную ходовую стенку, имеющую по меньшей мере одну вертикальную ходовую дорожку тел качения. По этой по меньшей мере одной вертикальной ходовой дорожке тел качения предпочтительно перемещаются дискообразные тела качения и/или иглообразные тела качения. Поверхность вертикальной ходовой стенки использована, с одной или с обоих сторон, в качестве вертикальной ходовой дорожки или дорожек. С помощью дискообразных и/или иглообразных тел качения можно создать боковую направляющую между корпусным рельсом и средним рельсом. В частности, если вертикальная ходовая стенка не расположена по центру внутри среднего рельса, то в этом случае весьма подходящей является комбинация иглообразных тел качения с одной стороны и дискообразных тел качения с другой стороны вертикальной ходовой стенки.
В альтернативном, также предпочтительном варианте осуществления выдвижного направляющего механизма корпусный рельс имеет треугольный профиль, на котором сформирована ориентированная вниз горизонтальная ходовая дорожка тел качения и две дополнительные наклонные ходовые дорожки тел качения, которые ориентированы вверх. В данном варианте боковое направление и амортизация действующих вниз сил достигаются за счет дополнительных наклонных ходовых дорожек тел качения, которые ориентированы вверх, и/или катящихся по ним тел вращения. Как и между средним рельсом и рельсом скольжения, здесь между средним рельсом и корпусным рельсом использована компактная, в частности, в отношении вертикальной высоты конструкции, призматическая направляющая.
В другом предпочтительном варианте осуществления выдвижного направляющего механизма на горизонтальный сегмент и/или полку среднего рельса нанесен, по меньшей мере на участке, утолщающий материал для укрепления среднего рельса. Утолщающий материал предпочтительно сформирован посредством операций раскатывания пластины, из которой изготовлен средний рельс, или нанесением полос материала. Это позволяет изготовить выдвижной направляющий механизм с особенно высокой несущей способностью, обойдясь без значительного общего утолщения материала, выбранного для среднего рельса. Тем самым достигается экономия материала и, следовательно, массы и затрат.
В другом предпочтительном варианте осуществления выдвижного направляющего механизма на среднем рельсе установлен, в фиксированном местоположении, по меньшей мере один вращаемый опорный ролик, взаимодействующий с рельсом скольжения. Опорные ролики могут использоваться в дополнение к телам качения для установки рельса скольжения на среднем рельсе, например, для передачи опрокидывающего крутящего момента от рельса скольжения на средний рельс. Опорные ролики предпочтительно расположить попарно на одной из сторон выдвижного направляющего механизма и установить так, чтобы обеспечить возможность их вращения на нем посредством цапф, например, в неподвижном местоположении относительно среднего рельса.
Далее изобретение описано более подробно на основе примеров его осуществления, со ссылкой на прилагаемые фигуры чертежей, где:
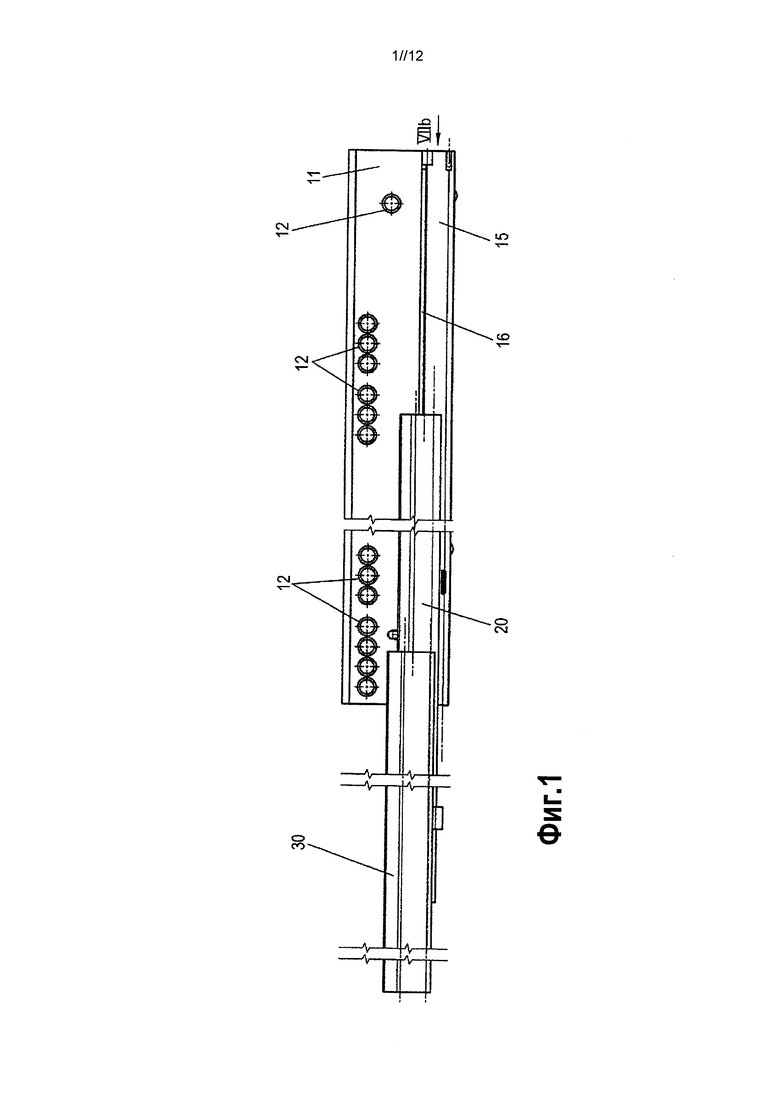
на фиг. 1 показан, на виде сбоку, пример осуществления выдвижного направляющего механизма, который имеет корпусный рельс, средний рельс и рельс скольжения;
на фиг. 2а-2d показан корпусный рельс выдвижного направляющего механизма с фиг. 1 с соответствующими телами качения в аксонометрической проекции (а), на виде (b) с торца, на виде (с) сбоку и на виде (d) сверху;
на фиг. 3а-3d показан средний рельс выдвижного направляющего механизма с фиг. 1 с соответствующими телами качения в аксонометрической проекции (а), на виде (b) с торца, на виде (с) сбоку и на виде (d) сверху;
на фиг. 4а-4d показан рельс скольжения выдвижного направляющего механизма с фиг. 1 с соответствующими телами качения в аксонометрической проекции (а), на виде (b) с торца, на виде (с) сбоку и на виде (d) сверху;
на фиг. 5а, b показаны внутренние обоймы тел качения в аксонометрической проекции (а) и на виде (b) с торца;
на фиг. 6а, b показаны наружные обоймы тел качения в аксонометрической проекции (а) и на виде (b) с торца;
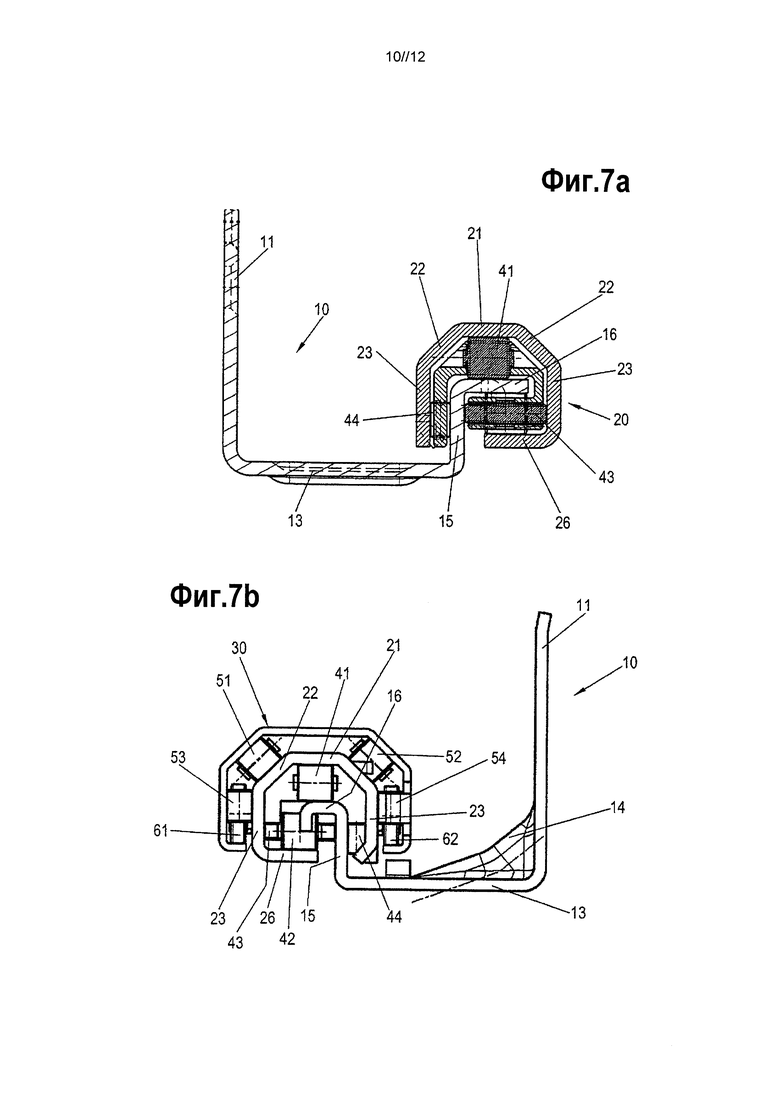
на фиг. 7а, b показан в упрощенном виде выдвижной направляющий механизм с фиг. 1 в разрезе (а) и на виде (b) с торца;
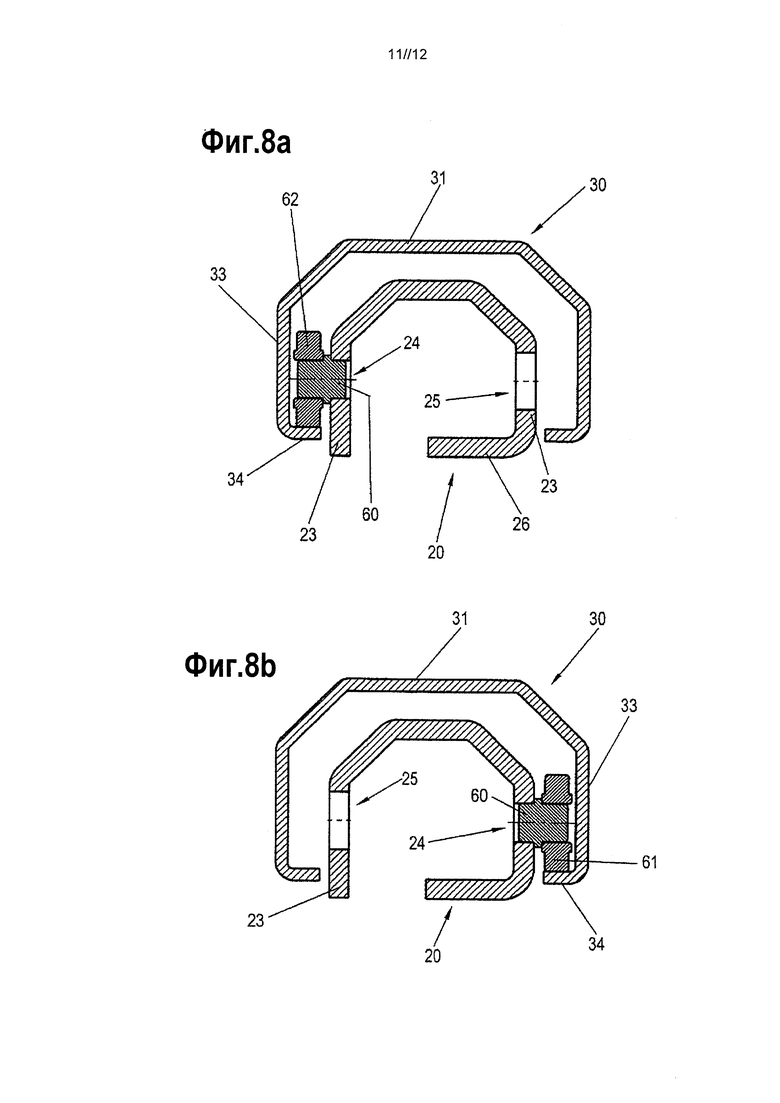
на каждой фигуре из фиг. 8а, b показан в упрощенном виде выдвижной направляющий механизм с фиг.1 в разрезе;
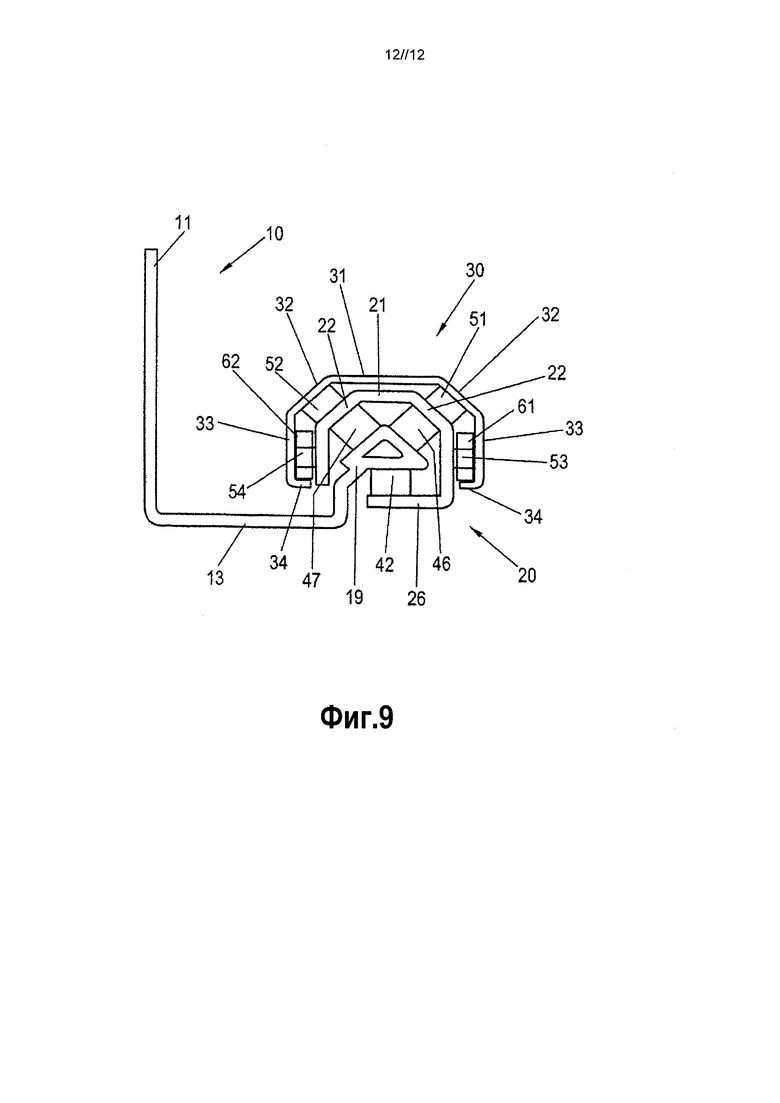
на фиг. 9 показан в разрезе другой пример осуществления выдвижного направляющего механизма.
Далее, со ссылкой на данные фигуры чертежей, подробно описаны два примера осуществления выдвижного направляющего механизма. Фиг. 1-8 относятся к первому примеру осуществления, а фиг.9 показывает второй пример осуществления, модифицированный по отношению к первому. На всех фигурах чертежей одинаковые обозначения идентифицируют идентичные или идентично работающие элементы.
На фиг.1 в общем виде показан сбоку первый пример осуществления выдвижного направляющего механизма, который находится в частично выдвинутом положении. Выдвижной направляющий механизм имеет три рельса - корпусный рельс 10, средний рельс 20 и рельс 30 скольжения.
Средний рельс 20 направляется так, что он смещается относительно корпусного рельса 10 и относительно рельса 30 скольжения, в каждом случае посредством роликообразных тел качения (не видны на фиг. 1). Используемые тела качения предпочтительно удерживаются в обоймах тел качения. Для каждой из рельсовых пар (корпусный рельс 10/средний рельс 20 или средний рельс 20/рельс 30 скольжения) можно предусмотреть одну или более таких обойм тел качения. Помимо тел качения для направления направляющих рельсов относительно друг друга можно предусмотреть ходовые или скользящие элементы, отличающиеся от тел качения тем, что их положение зафиксировано по отношению к одному из указанных направляющих рельсов.
Корпусный рельс 10 имеет вертикальную установочную секцию 11, используя которую его можно фиксировать, например, на внутренней стенке мебельного корпуса, например, кухонного шкафа. Для этой цели в установочной секции 11 выполнены крепежные отверстия 12. Рельс 30 скольжения зафиксирован на перемещаемом мебельном компоненте, например, на выдвижном ящике. Для этой цели он снабжен крепежным средством, которое как таковое известно и не показано в данной примере осуществления. Данное крепежное средство может содержать, например, вставной крючок и/или средства захвата или ответные отверстия для средств захвата.
Все три направляющих рельса предпочтительно изготовлены из металлической пластины, которая может иметь равномерную толщину материала для всех трех рельсов, или же разную толщину материала, приспособленную под соответствующую нагрузку. По отдельности каждый из направляющих рельсов изготовлен, особо предпочтительно, в виде цельного фасонно-прокатного профиля. Однако они могут быть изготовлены и единственно путем штампования и гибки, или же комбинацией обоих указанных способов.
Если требуется увеличение толщины материала для достижения особой устойчивости для варианта высокой нагрузки внутри направляющего рельса в выбранных зонах, это можно реализовать, используя так называемую специальную заготовку, в которой увеличение толщины материала получают локально в ходе предшествующего процесса раскатывания. В альтернативном варианте в качестве материала укрепления в укрепляемых зонах можно использовать дополнительный пластинчатый элемент, нанесенный, например, процедурой точечной сварки.
В проиллюстрированных здесь примерах осуществления выдвижной направляющий механизм показан без дополнительных функциональных элементов. При этом очевидно, что проиллюстрированный выдвижной направляющий механизм можно снабдить известными сами по себе устройствами отведения или выдвижения для одного или обоих конечных положений, а также демпфирующими блоками, отдельным от них или в комбинации с ними. Кроме того, можно предусмотреть средства синхронизации для обеспечения зеркального синхронного перемещения корпусного рельса 10 и рельса 30 скольжения по отношению к среднему рельсу 20.
Далее со ссылкой на описываемые далее фигуры подробно описана форма, в частности, профиль направляющих рельсов, а также расположение и выполнение тел качения, расположенных между направляющими рельсами.
С этой целью на каждой из фиг. 2-4 показан один из направляющих рельсов - корпусный рельс 10 на фиг. 2, средний рельс 20 на фиг. 3 и рельс 30 скольжения на фиг. 4, без соответствующих других направляющих рельсов, но с соответствующими телами качения. Они, в свою очередь, для наглядности показаны без вмещающих их обойм тел качения. Каждая из фиг. 2-4 содержит частичные изображения а-d, где соответствующий направляющий рельс показан в аксонометрической проекции на частичном изображении а, сверху с торца - на частичном изображении b, сбоку - на частичном изображении с и сверху - на частичном изображении d. Обоймы тел качения, не показанные на фиг. 2-4, показаны на фиг. 5 и 6, относящиеся к описанию отдельных направляющих рельсов.
Как показано на фиг. 2, нижний конец установочной секции 11 корпусного рельса 10 выполнен с отогнутой горизонтальной консольной стенкой 13. В переходной зоне между установочной секцией 11 и консольной стенкой 13 сформированы, в данном примере, два ребра 14 жесткости. Для случаев с тяжелой нагрузкой количество ребер 14 жесткости может быть увеличено. Опционально, в выдвижных направляющих механизмах, не предназначенных для таких высоких нагрузок, ребра 14 жесткости могут и не использоваться. На конце консольной стенки 13, противоположном установочной секции 11, корпусный рельс 10 снова загнут перпендикулярно, образуя вертикальный сегмент, который, в свою очередь еще раз отогнут и переходит в горизонтальный сегмент.
Далее вертикальный и горизонтальный сегменты корпусного рельса 10 называются вертикальной ходовой стенкой 15 и горизонтальной ходовой стенкой 16 соответственно, поскольку они создают ходовые дорожки для тел качения, расположенных между корпусным рельсом 10 и средним рельсом 20. Далее ходовые дорожки тел качения для краткости называются ходовыми дорожками, каждой из которых присвоен символ соответствующего сегмента направляющего рельса, дополненный одним (') или двумя ('') апострофами. Один апостроф означает обращенные внутрь ходовые дорожки, а два апострофа означают обращенные наружу ходовые дорожки направляющих рельсов.
В корпусном рельсе 10 вертикальная ходовая стенка 15 имеет первую ходовую дорожку 15'' на стороне, обращенной от установочной секции 11, и вторую ходовую дорожку 15'' на стороне, обращенной к установочной секции 11. Горизонтальная ходовая стенка 16 имеет на своей верхней стороне первую ходовую дорожку 16'' и вторую ходовую дорожку 16'' на своей нижней стороне.
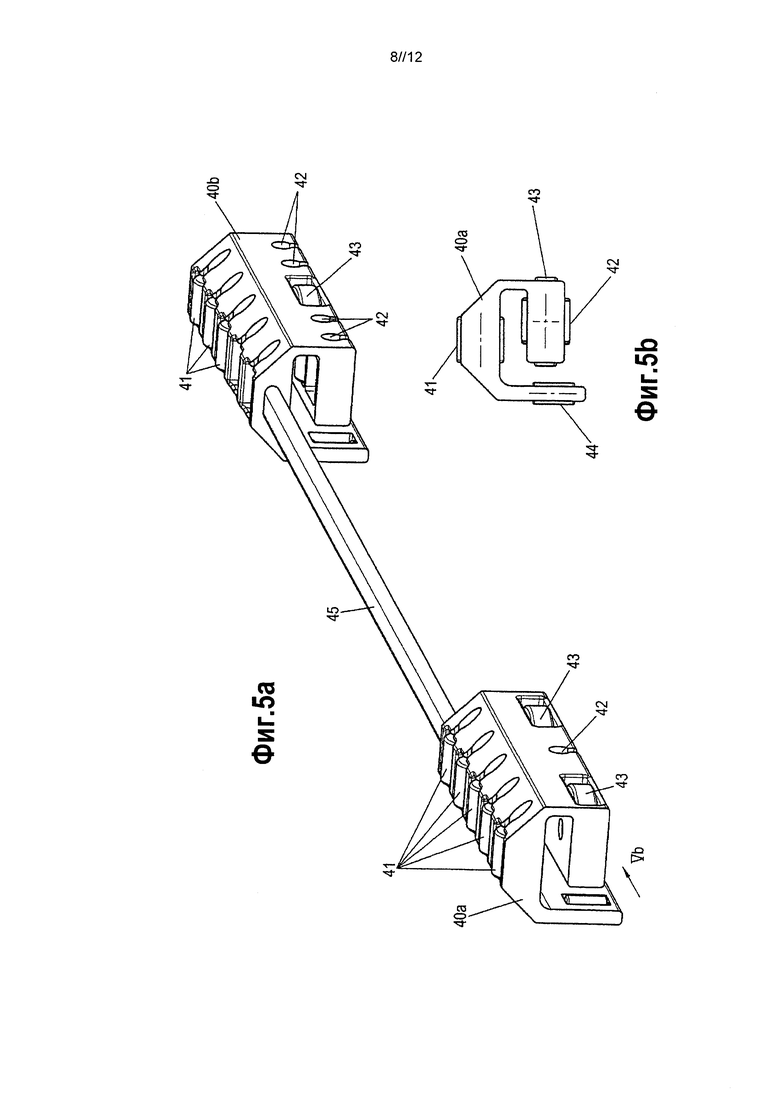
По ходовым дорожкам 15'', 16'' перемещаются различные тела 41-44 качения, которые разделены на две группы, связанные, соответственно, с передней обоймой 40а тел качения и задней обоймой 40b тел качения. Обоймы 40а и 40b тел качения, вместе с телами 41-44 качения, показаны на фиг. 5а в аксонометрической проекции, а на фиг.5b - с торца (при обзоре в направлении стрелки Vb с фиг. 5а).
Две обоймы 40а, 40b тел качения отделены друг от друга разделителем 45. Вместо отдельно сформированных клеток 40а, 40b и разделителя 45 также может использоваться соответственно более длинная единая обойма тел качения или сборная обойма тел качения, составляемая из множества частей. Далее тела 41-44 качения также называются внутренними телами качения, поскольку они расположены внутри среднего рельса 20. Обоймы 40а, 40b тел качения также называются внутренними обоймами тел качения. В качестве тел качения на ходовых дорожках 16'' горизонтальной ходовой стенки 16 использованы цилиндрические тела 41, 42 качения. В проиллюстрированном примере осуществления цилиндрические тела 41 качения, перемещающиеся по верхней ходовой дорожке 16'', и цилиндрические тела 42 качения, перемещающиеся по нижней ходовой дорожке 16'', имеют аналогичную конструкцию. При этом они могут иметь и различные диаметры. Цилиндрические тела 41, 42 качения передают силы, действующие вертикально на горизонтальную ходовую стенку 16. По существу они возникают в результате силы веса нагрузки, несомой направляющим рельсом, и опрокидывающего крутящего момента вокруг горизонтальной оси, появляющегося при выдвижении выдвижного направляющего механизма под нагрузкой, несомой выдвижным направляющим механизмом. Цилиндрические тела 41, 42 качения хорошо подходят для передачи увеличенных сил веса и результирующих опрокидывающих крутящих моментов вследствие широкой линии их контакта с ходовыми дорожками 16''. Соответственно ходовые дорожки 16'' выполнены ровными для расширения контакта с цилиндрическими телами 41, 42 качения. В альтернативных вариантах осуществления выдвижного направляющего механизма могут быть использованы и бочкообразные тела качения или тела качения, имеющие удлинение в другой геометрической конфигурации. В данном случае соответствующую ходовую дорожку можно приспособить к форме тела качения, с кривизной поперек продольного направления.
На концах ходовой стенки 15, 16, расположенных в продольном направлении, имеются изгибы и/или рельефы и/или отклонения, формирующие ограничители. Ограничители 17, 18 предотвращают выкатывание тел качения за концы ходовых стенок. Ограничители 17, 18 взаимодействуют непосредственно с телами качения или же с обоймой тел качения, или же с ограничителями, сформированными на среднем рельсе 20. Ограничители 27, 28 в среднем рельсе 20 (см. фиг. 3) и ограничитель 35 в рельсе 30 скольжения (см. фиг. 4) выполняют эту же функцию.
Для бокового направления использованы иглообразные роликовые подшипники 44, взаимодействующие с вертикальной ходовой стенкой 15 и ее ходовыми дорожками 15'', и дискообразные тела 43 качения. Вследствие значительно меньших сил, передаваемых в боковую направляющую, каждое из них предусмотрено лишь в количестве двух штук в передней обойме 40а тел качения, а одной штуки - в задней обойме 40b тел качения. В общем, в каждой из обойм 40а, 40b тел качения (то есть, в каждой группе тел качения) находится по меньшей мере шесть цилиндрических тел 41, 42 качения. Однако их распределение среди тел 41 качения, перемещающихся по верхней ходовой дорожке 16'', и тел 42 качения, перемещающихся по нижней ходовой дорожке 16', отличается в передней и задней группах тел качения. В убранной зоне силы веса действуют приблизительно одинаково на переднюю и заднюю группы тел качения. Однако, из-за опрокидывающего крутящего момента в выдвинутом положении выдвижного направляющего механизма увеличивается нагрузка на верхнюю ходовую дорожку 16'' в передней группе тел качения и увеличивается нагрузка на нижнюю ходовую дорожку 16' в задней группе тел качения. Соответственно, в передней обойме 40а тел качения предусмотрены по меньшей мере пять верхних цилиндрических тел 41 качения и по меньшей мере одно нижнее цилиндрическое тело 42 качения. В отличите от этого, в каждом случае в задней обойме 40b тел качения расположены по меньшей мере три верхних цилиндрических тела 41 качения и по меньшей мере три нижних цилиндрических тела 42 качения.
На фиг. 3 показаны различные изображения среднего рельса 20, аналогично фиг. 2. Помимо среднего рельса 20, показаны предназначенные для него тела качения. Как можно видеть на частичных изображениях с торца на фиг. 3b, сбоку на фиг. 3с и сверху на фиг.3d (показаны штриховыми линиями в качестве скрытых элементов), это внутренние тела 41-44 качения, которые обеспечивают возможность смещения относительно корпусного рельса 10. Кроме этого, показаны наружные тела 51-54 качения, соединенные функционально с рельсом 30 скольжения и катящиеся по наружной ходовой дорожке среднего рельса 20.
Средний рельс 20 выполнен С-образным в профиле, с верхним средним горизонтальным сегментом 21, к которому по обеим сторонам примыкают наклонные сегменты 22. Наружными поверхностями наклонных сегментов 22 образованы наружные ходовые дорожки 22'' для наружных тел 51 или 52 качения соответственно. К двум наклонным секциям 22 снаружи примыкают боковые секции 23, наружная поверхностей каждой из которых опять же образует ходовую дорожку 23'. По ним, соответственно, катятся наружные тела 53 или 54 качения.
В боковых сегментах 23 выполнены приемные отверстия 24 под дополнительные опорные ролики. Такое приемное отверстие 24 выполнено в каждом из двух боковых сегментов 23, причем приемное отверстие 24 смещено по отношению к своему продольному положению в двух боковых сегментах 23. Напротив соответствующего приемного отверстия 24 расположено установочное отверстие 25, имеющее диаметр немного больше диаметра приемного отверстия 24. Функция приемного отверстия 24 и установочного отверстия 25 описана далее более подробно со ссылкой на фиг. 8.
В то время как боковой сегмент 23 образует свободную полку С-образного профиля на одной стороне профиля среднего рельса 20, боковой сегмент 23 идет под углом горизонтально внутрь на противоположной стороне профиля, так что на этой стороне сформирована горизонтально расположенная полка 26 ориентированной внутрь ходовой дорожкой 26'. В то время как одной стороной С-образного профиля среднего рельса 20 образована открытая ʺСʺ, на противоположной стороне сформирована закрытая ʺСʺ.
Более подробно взаимодействие корпусного рельса 10 со средним рельсом 20 через внутренние тела 41-44 качения показано на фиг. 7а в поперечном разрезе этих двух рельсов.
Силы, действующие вертикально вниз на средний рельс 20, поглощаются внутренними цилиндрическими телами 41 качения, расположенными между ходовой дорожкой 16'' на верхней стороне горизонтальных ходовых стенок 16 корпусного рельса 10, и внутренней стороной горизонтального сегмента 21 среднего рельса 20. Силы, действующие вертикально вверх на средний рельс 20, передаются от внутренних цилиндрических тел 42 качения, расположенных между нижней стороной горизонтальной ходовой стенки 16 корпусного рельса 10 (нижняя ходовая дорожка 16''), и верхней стороной полки 26 среднего рельса 20 (ходовая дорожка 26'). Как хорошо видно из изображения в разрезе, таким образом полка 26 частично охватывает корпусный рельс 10 и, следовательно, позволяет амортизировать высокий опрокидывающий крутящий момент.
Как уже отмечено, для бокового направления среднего рельса 20 на корпусном рельсе 10 используются внутренние дискообразные тела 43 качения на одной стороне вертикальной ходовой стенки 15 и внутренние иглообразные тела 44 качения на другой стороне вертикальной ходовой стенки 15.
Каждое из внутренних тел 43, 44 качения перемещается по внутренней стороне двух боковых сегментов 23 на ходовых дорожках 23' среднего рельса 20. Вследствие использования иглообразного внутреннего тела 44 качения на стороне вертикальной стенки 15, обращенной к установочной секции 11, в данной точке между вертикальной ходовой стенкой 15 корпусного рельса 10 и соответствующим боковым сегментом 23 среднего рельса 20 достигается меньшее расстояние. Следовательно, консольная стенка 13 должна быть лишь незначительно длиннее расстояния, необходимого между установочной секцией 11 и направляющими рельсами. Это положительно влияет на статическое равновесие корпусного рельса 10. В проиллюстрированном примере осуществления между установочным сегментом 11 и направляющими рельсами имеет место относительное увеличение расстояния. Таким образом, показанный пример выдвижного направляющего механизма подходит, в частности, для так называемого ''подпольного'' выдвижного направляющего механизма, часто используемого вместе с деревянными выдвижными ящиками. В этом случае боковая стена выдвижного ящика расположена в зазоре, сформированном между установочной секцией 11 и рельсом 30 скольжения. Здесь выдвижной ящик опирается своим днищем на рельс 30 скольжения.
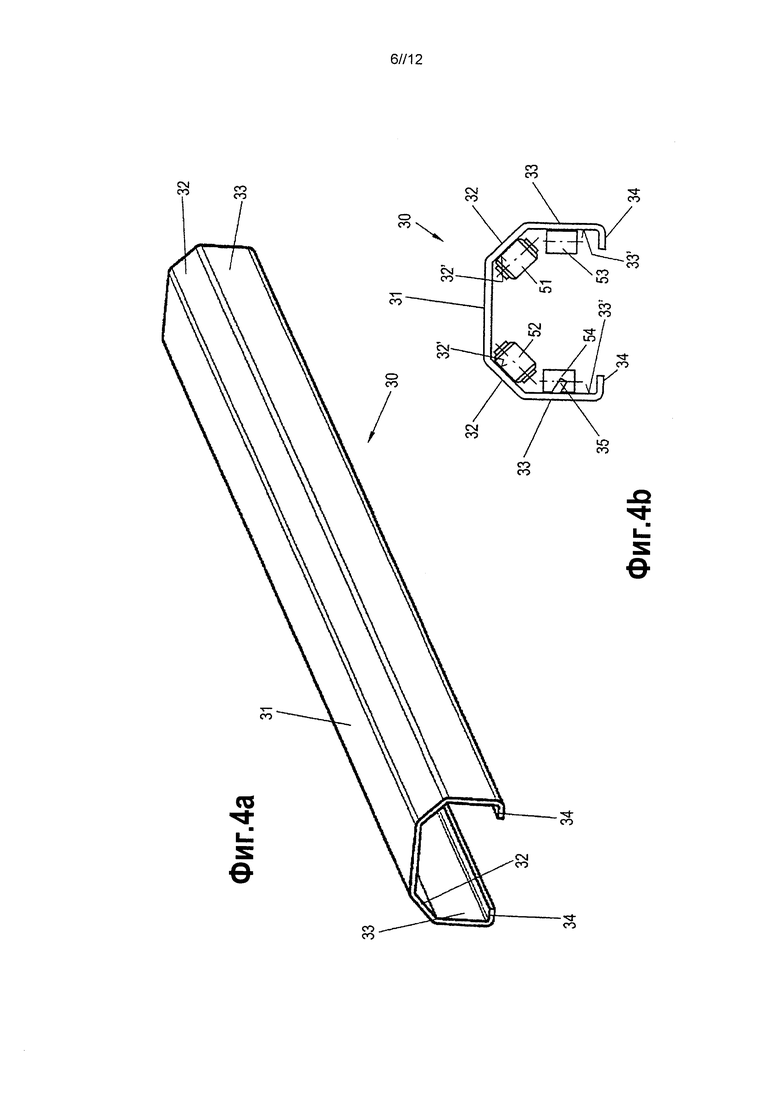
На фиг. 4, аналогично фиг. 2 и 3, показан более подробно рельс 30 скольжения.
Аналогично среднему рельсу 20, рельс 30 скольжения выполнен С-образным и имеет верхний средний горизонтальный сегмент 31, к которому с обеих сторон примыкают наклонные сегменты 32, переходящие, в свою очередь, в вертикальные боковые сегменты 33. Каждый из концов боковых сегментов 33 изогнут внутрь таким образом, что на обоих сторонах сформированы горизонтальные концевые сегменты 34. В отличие от среднего рельса 20, рельс 30 скольжения симметричен относительно своего профиля. Как хорошо показано, в частности на виде сбоку с частичной фиг.4 с, ограничитель 35 поставлен вертикально по меньшей мере на одном конце рельса 30 скольжения. Ориентированные внутрь поверхности наклонных сегментов 32 и боковых сегментов 33 представляют собой, каждая, соответственно ходовую дорожку 32' или 33'.
Взаимодействие среднего рельса 20 с рельсом 30 скольжения через наружные тела 51-54 качения визуализировано на фиг.7b, где показан вид с торца выдвижного направляющего механизма в продольном направлении. На фиг. 1 направление обзора обозначено стрелкой VIIb.
Передача силы, действующей вертикально сверху на рельс 30 скольжения, происходит через наружные тела 51 и 52 качения, катящиеся по соответствующим ходовым дорожкам 22'' наклонных сегментов 22 среднего рельса 20 или на ходовых дорожках 32' наклонных сегментов 32 рельса 30 скольжения, соответственно. Данные тела 51, 52 качения выполнены, подобно несущим вертикальную нагрузку внутренним телам 41 качения, цилиндрическими, так что они имеют максимально большую линию контакта с соответствующими ходовыми дорожками 22'', 32'. Вместо цилиндрических тел 51, 52 качения в данном случае могут быть использованы и бочкообразные тела качения, или же тела качения с удлинением в другой геометрической конфигурации.
В соответствии с наклонным положением наклонных сегментов 22, 32, оси вращения наружных цилиндрических тел 51, 52 качения наклонены в виде призмы относительно друг друга, в данном случае примерно на 90°°. В дополнение к амортизации вертикальной нагрузки, это наклонное положение обеспечивает хорошее боковое направление рельса 30 скольжения по среднему рельсу 20. Кроме этого, достигнута маленькая конструкционная высота.
Дополнительно для бокового направления предусмотрены цилиндрические наружные тела 53, 54 качения, перемещающиеся по существу перпендикулярно оси вращения по соответствующим ходовым дорожкам 23'' или 33' боковых сегментов 23 или 33, соответственно. В данном примере осуществления наружные цилиндрические тела 53, 54 качения выполнены с немного меньшим диаметром, чем наружные цилиндрические тела 51, 52 качения.
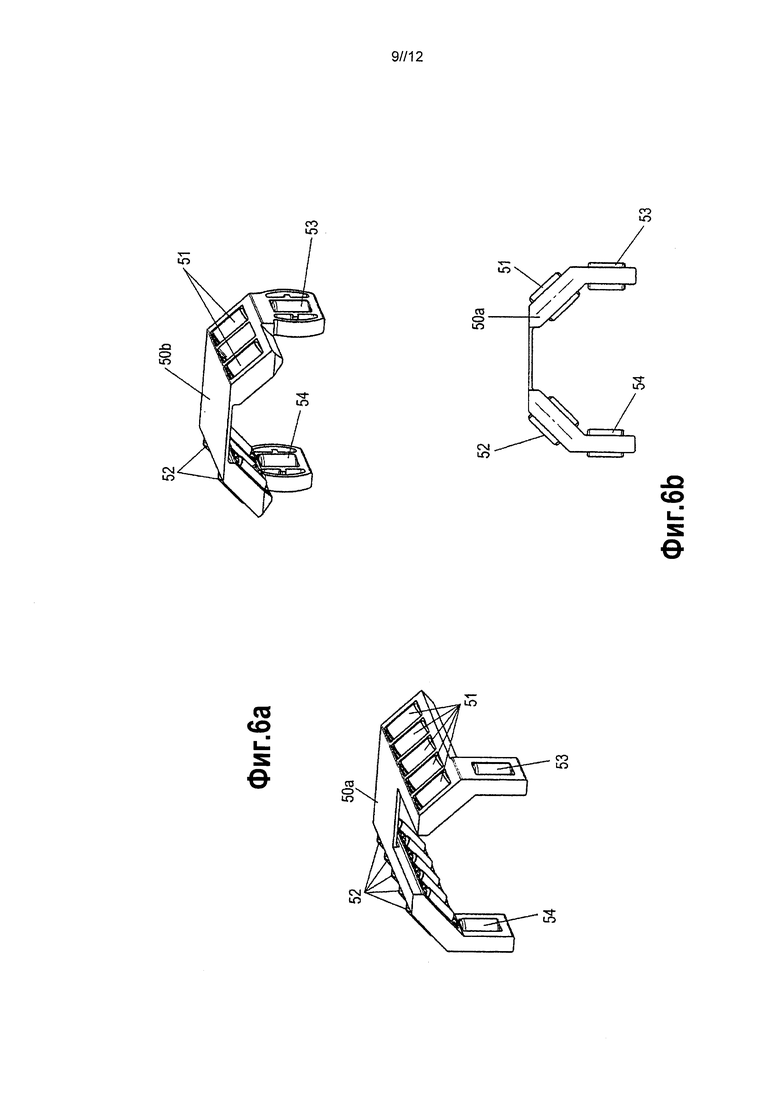
Аналогично внутренним телам 41-44 качения, наружные тела 51-54 качения также организованы в две группы, для каждой из которых предназначена, соответственно, наружная обойма 50а тел качения или наружная обойма 50b тел качения. На фиг. 6а показаны обоймы 50а и 50b тел качения вместе с телами качения в аксонометрической проекции, а на фиг. 6b - с торца (при обзоре в направлении стрелки VIb с фиг. 6а).
Из-за опрокидывающего крутящего момента в выдвинутом выдвижном направляющем механизме, в передней наружной обойме 50 тел качения предусмотрено большее количество наружных цилиндрических тел 51, 52 качения, которые амортизируют действующих вертикально сверху силы, по сравнению с задней обоймой 50b тел качения. В проиллюстрированном примере осуществления в задней обойме 50b тел качения в каждом случае имеются три гнезда для наружных цилиндрических 51, 52 тел качения. При этом в данном примере в каждом случае заняты лишь два из трех гнезд. Опционально, для выдвижного направляющего механизма, предназначенного для амортизации еще больших нагрузок, задняя обойма 50b тел качения может быть в каждом случае снабжена также по меньшей мере тремя наружными цилиндрическими телами 51, 52 качения.
В рассматриваемом случае две наружные обоймы 50а, 50b тел качения сформированы отдельно друг от друга. Как описано со ссылкой на фиг. 5, между двумя наружными обоймами 50а, 50b тел качения также можно предусмотреть, в опциональном варианте, разделитель, или же единственную, соответственно более длинную обойму тел качения, которая имеет гнезда тел качения в своей передней или, соответственно, задней зоне.
В проиллюстрированном примере осуществления все тела 41-44 и 51-54 качения снабжены на своих концевых сторонах опорными цапфами, посредством которых они установлены в обоймах 40а, 40b, 50а, 50b тел качения. Согласно альтернативным вариантам, можно разместить опорные цапфы на стороне обойм тел качения и использовать подходящие фронтальные углубления в телах качения.
Используемые тела 41, 44, 51, 54 качения предпочтительно изготовлены из твердой стали. В этом случае для всех тел качения можно использовать один и тот же материал. В альтернативном варианте некоторые тела качения могут быть изготовлены и из другого материала, в частности, с другой твердостью. Например, некоторые тела качения можно изготовить из значительно более мягкого материала, в частности, из пластикового материала. Это может положительно повлиять на ходовые свойства, в частности, снизить шум при перемещении.
В общем случае все тела качения, катящиеся по одной ходовой дорожке или соответствующим друг другу ходовым дорожкам (например, наружные цилиндрические тела 51 качения и наружные цилиндрические тела 52 качения), имеют одинаковый диаметр. Однако отдельные тела качения, катящиеся по одной и той же дорожке или соответствующим друг другу ходовым дорожкам, могут иметь и немного отличающийся диаметр. Это также может иметь положительный эффект в отношении ходовых свойств, в частности, приводить к уменьшению шума при перемещении.
В проиллюстрированном здесь примере осуществления не происходит передачи сил, действующих вертикально снизу на рельс 30 скольжения, возникающих, например, вследствие опрокидывающего крутящего момента при выдвинутом выдвижном направляющем механизме, через наружные тела 51 -54 качения в средний рельс 20. Принципиально возможно, аналогично среднему рельсу 20, который, по меньшей мере частично, охватывает корпусный рельс 10 своей отогнутой полкой 26, выполнить и рельс 30 скольжения так, чтобы он охватывал средний рельс 20 своими горизонтальными концевыми элементами 34. Между этим охватывающим концевым сегментом рельса 30 скольжения и охватывающей полкой 26 среднего рельса 20 можно разместить дополнительные наружные тела качения, надлежащим образом способные амортизировать опрокидывающий крутящий момент.
В данном примере осуществления реализована альтернатива. В данном случае отогнутые концевые сегменты 34 сформированы так, что они не охватывают средний рельс 20, а находятся сбоку по отношению к среднему рельсу 20. Верхние стороны отогнутых концевых сегментов 34 использованы в качестве ходовых дорожек 34', по которым катятся дополнительные опорные ролики 61, 62.
Это проиллюстрировано на фиг. 8 на двух упрощенных изображениях в разрезе через средний рельс 20 и рельс 30 скольжения. Дополнительные опорные ролики 61, 62, в каждом случае расположенные на одной из сторон выдвижного направляющего механизма, установлены по месту в положении фиксированно относительно среднего рельса 20 посредством цапф 60 так, что они могут на них вращаться. В данном случае цапфы 60 вставлены, в частности, запрессованы, в приемных отверстиях 24, описанные выше со ссылкой на фиг. 3. Напротив каждого приемного отверстия 24 в каждом случае в противоположном боковом сегменте 23 среднего рельса 20 выдавлено установочное отверстие 25 большего диаметра. Через установочное отверстие 25 в средний рельс 20 может быть вставлена вспомогательная оправка, посредством которой на боковой сегмент 23 в зоне кромки приемного отверстия 24 может быть оказано противодавление при запрессовке цапфы 60 в приемное отверстие 24. Соответственно, два дополнительных опорных ролика 61 и 62 на обеих сторонах выдвижного направляющего механизма находятся не в одном продольном местоположении, а немного сдвинуты друг относительно друга в продольном направлении. В рассматриваемом примере осуществления на каждой из двух сторон расположен один подобный дополнительный опорный ролик 61, 62. При необходимости амортизации более значительных опрокидывающих крутящих моментов можно предусмотреть множество пар таких опорных роликов 61, 62. В качестве альтернативы вместо приемного отверстия в данном месте можно вытянуть непосредственно из основного материала осевой выступ в виде прохода, или же прикрепить болт интегрально к поверхности.
С точки зрения своего положения в продольном направлении, опорные ролики находятся приблизительно в середине на среднем рельсе 20, так что при полном выдвижении выдвижного направляющего механизма они поддерживают рельс 30 скольжения, в частности, на заднем его конце. Положение дополнительных опорных роликов 61, 62 явно следует из местоположения приемного отверстия 24 или установочного отверстия 25 на фиг. 3а.
На фиг. 9 показан второй пример осуществления выдвижного направляющего механизма, на схематичном виде сверху в продольном направлении, аналогично первому примеру осуществления с фиг. 7b. Средний рельс 20 и рельс 30 скольжения, равно как и направление этих двух рельсов относительно друг друга посредством наружных тел 51-54 качения и дополнительных опорных колес 61, 62 по существу соответствуют первому примеру осуществления, на который здесь делается ссылка.
Второй пример осуществления отличается, в частности, исполнением корпусного рельса 10. Он снова имеет вертикальный установочный сегмент 11 и выступающий перпендикулярно из него горизонтальный консольный сегмент 13. Опционные ребра жесткости (обозначены 14 на фиг. 7b) здесь не показаны.
Имеется несущий сегмент, проходящий сначала вертикально, а затем диагонально, и скошенный на конце консольного сегмента 13. Данный несущий сегмент переходит в треугольный профиль 19, имеющий основание, обращенное горизонтально вниз, и расположенные над ним две наклонные полки. Треугольный профиль 19 может быть сформирован в виде единой детали путем соответствующего отгибания вышеуказанных сегментов корпусного рельса 10. В альтернативном варианте треугольный профиль 19 может представлять собой элемент, изготовленный сначала отдельно, а затем присоединенный, например, приваренный к несущему сегменту. Основание треугольного профиль 19 создает ходовую дорожку, которая по своей функции соответствует ходовой дорожке 16'' на нижней стороне горизонтальной ходовой стенки 16 из первого примера осуществления. Внутренние цилиндрические тела 42 качения снова расположены соответственно между этой ходовой дорожкой и охватывающей полкой 26 среднего рельса 20.
Вместо внутренних цилиндрических тел 41 качения, внутренних иглообразных тел 43 качения и внутренних дискообразных тел 44 качения в данном случае предусмотрены внутренние цилиндрические тела 46 и 47 качения, катящиеся по ходовым дорожкам, сформированным на наклонных полках треугольного профиля 19. На среднем рельсе 20 указанные внутренние цилиндрические тела 46, 47 качения перемещаются по внутренней стороне наклонных сегментов 22 среднего рельса 20, то есть по внутренним ходовым дорожкам, расположенным прямо напротив наружных ходовых дорожек 22'' для наружных цилиндрических тел 51, 52 качения.
Таким образом, в рассматриваемом примере осуществления между корпусным рельсом 10 и средним рельсом 20, как и между средним рельсом 20 и рельсом 30 скольжения, реализована призматическая направляющая, посредством почти перпендикулярных друг другу наклонных осей вращения наружных цилиндрических тел 51, 52 качения.
Перечень ссылочных обозначений
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫТЯЖНАЯ НАПРАВЛЯЮЩАЯ ДЛЯ ЧАСТЕЙ МЕБЕЛИ, ПЕРЕМЕЩАЕМЫХ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2015 |
|
RU2681595C2 |
| РЕЛЬС ДЛЯ АРМАТУРЫ РАЗДВИЖНЫХ ДВЕРЕЙ | 2015 |
|
RU2683967C2 |
| МЕБЕЛЬНЫЙ ЭЛЕМЕНТ | 2020 |
|
RU2810366C2 |
| ШАРИКОВАЯ ЦИЛИНДРИЧЕСКАЯ ПЕРЕДАЧА | 2002 |
|
RU2232318C2 |
| ЭЛЕМЕНТ МЕБЕЛИ, ПРЕДМЕТ МЕБЕЛИ, СОДЕРЖАЩИЙ ЭЛЕМЕНТ МЕБЕЛИ (ВАРИАНТЫ) | 2020 |
|
RU2806990C2 |
| ВЫДВИЖНАЯ НАПРАВЛЯЮЩАЯ | 2020 |
|
RU2810353C1 |
| НАПРАВЛЯЮЩАЯ ДЛЯ ВЫДВИЖЕНИЯ ЯЩИКА | 2012 |
|
RU2560330C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КАРЬЕРНОГО ЭКСКАВАТОРА | 2008 |
|
RU2425193C2 |
| Направляющая для выдвижного блока | 1990 |
|
SU1757623A1 |
| ДВИГАТЕЛЬНАЯ СИСТЕМА | 2018 |
|
RU2731347C1 |





Изобретение относится к выдвижному направляющему механизму для подвижных мебельных компонентов и направлено на уменьшение высоты механизма. Выдвижной направляющий механизм имеет корпусный рельс, С-образный средний рельс и рельс скольжения, выполненный с возможностью закрепления на мебельном компоненте, причем С-образный средний рельс имеет обращенные внутрь внутренние ходовые дорожки тел качения для роликообразных тел качения, расположенных между средним рельсом и корпусным рельсом, и по меньшей мере две наружные ходовые дорожки тел качения, отделенные друг от друга горизонтальным сегментом среднего рельса и наклоненные наружу, для дополнительных роликообразных тел качения, расположенных между средним рельсом и рельсом скольжения. На С-образном среднем рельсе сформирована свободная полка, частично охватывающая корпусный рельс, причем на внутренней стороне полки сформирована дополнительная внутренняя ходовая дорожка тел качения для роликообразных тел качения, расположенных между средним рельсом и корпусным рельсом. Вертикальное расстояние между горизонтальным сегментом среднего рельса и расположенным над ним горизонтальным сегментом рельса скольжения меньше, чем диаметр тел качения, перемещающихся по наклоненным наружу наружным ходовым дорожкам тел качения среднего рельса. 8 з.п. ф-лы, 22 ил.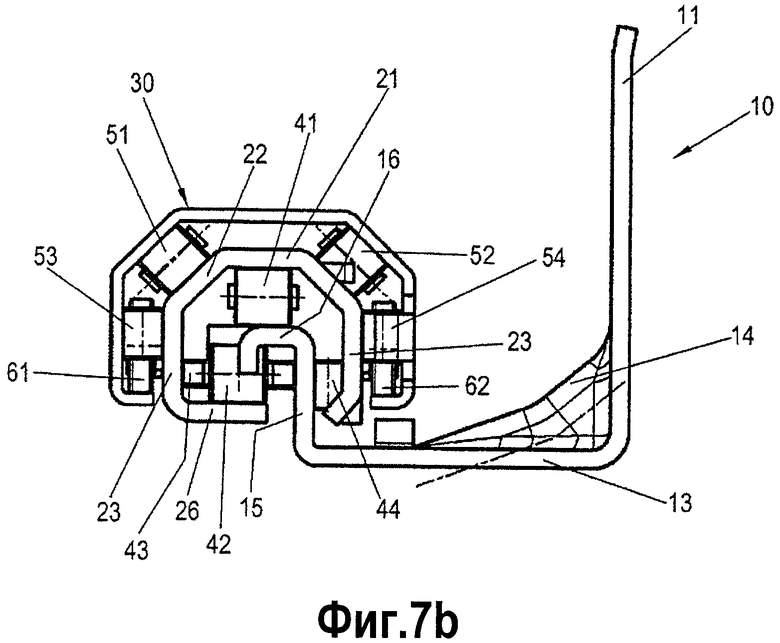
1. Выдвижной направляющий механизм для подвижных мебельных компонентов, в частности выдвижных ящиков, имеющий корпусный рельс (10), С-образный средний рельс (20) и рельс (30) скольжения, выполненный с возможностью закрепления на мебельном компоненте, причем С-образный средний рельс (20) имеет обращенные внутрь внутренние ходовые дорожки (21', 22') тел качения для роликообразных тел (41, 43, 44, 46, 47) качения, расположенных между средним рельсом (20) и корпусным рельсом (10), и по меньшей мере две наружные ходовые дорожки (22'') тел качения, отделенные друг от друга горизонтальным сегментом (21) среднего рельса (20) и наклоненные наружу, для дополнительных роликообразных тел (51, 52, 53, 54) качения, расположенных между средним рельсом (20) и рельсом (30) скольжения, отличающийся тем, что на С-образном среднем рельсе (20) сформирована свободная полка (26), частично охватывающая корпусный рельс (10), причем на внутренней стороне полки (26) сформирована дополнительная внутренняя ходовая дорожка (26') тел качения для роликообразных тел (42) качения, расположенных между средним рельсом (20) и корпусным рельсом (10),
причем вертикальное расстояние между горизонтальным сегментом (21) среднего рельса (20) и расположенным над ним горизонтальным сегментом рельса (30) скольжения меньше, чем диаметр тел (51, 52) качения, перемещающихся по наклоненным наружу наружным ходовым дорожкам (22'') тел качения среднего рельса (20).
2. Направляющий механизм по п. 1, отличающийся тем, что ходовые дорожки (21', 22'', 26') тел качения выполнены в виде линейных поверхностей.
3. Направляющий механизм по любому из пп. 1, 2, отличающийся тем, что корпусный рельс (10) имеет горизонтальную ходовую стенку (16), имеющую по меньшей мере одну ориентированную вниз горизонтальную ходовую дорожку (16'') тел качения, причем роликообразные тела (42) качения расположены между дополнительной внутренней ходовой дорожкой (26') тел качения, сформированной на полке (26) среднего рельса (20), и ориентированной вниз горизонтальной ходовой дорожкой (16'') тел качения.
4. Направляющий механизм по п. 3, отличающийся тем, что корпусный рельс (10) имеет вертикальную ходовую стенку (16), имеющую по меньшей мере одну вертикальную ходовую дорожку (15'') тел качения.
5. Направляющий механизм по п. 4, отличающийся тем, что по указанной по меньшей мере одной вертикальной ходовой дорожке (15'') тел качения перемещаются дискообразные тела (43) качения и/или иглообразные тела (44) качения.
6. Направляющий механизм по п. 3, отличающийся тем, что корпусный рельс (10) имеет треугольный профиль (19), на котором сформирована ориентированная вниз горизонтальная ходовая дорожка (16') тел качения, а также две дополнительные, ориентированные вверх, диагональные ходовые дорожки тел качения.
7. Направляющий механизм по любому из пп. 1, 2, 4-6, отличающийся тем, что по меньшей мере на участке на горизонтальном сегменте (21) и/или полки (26) среднего рельса (20) нанесен утолщающий материал для укрепления среднего рельса (20).
8. Направляющий механизм по п. 7, отличающийся тем, что утолщающий материал сформирован посредством операций раскатывания пластины, из которой изготовлен средний рельс (20), или посредством нанесения полос материала.
9. Направляющий механизм по любому из пп. 1, 2, 4-6, 8, отличающийся тем, что роликообразные тела (41, 43, 44, 46, 47) качения и/или дополнительные роликообразные тела (51, 52, 53, 54) качения являются цилиндрическими, бочкообразными, иглообразными или дискообразными.
10. Направляющий механизм по любому из пп. 1, 2, 4-6, 8, отличающийся тем, что на среднем рельсе (20) установлен в фиксированном местоположении по меньшей мере один вращаемый опорный ролик (61, 62), взаимодействующий с рельсом (30) скольжения.
| DE 4204067 A1, 19.08.1993 | |||
| Поворотное устройство | 1982 |
|
SU1066773A1 |
| DE 202009003883 U1, 16.07.2009 | |||
| DE 202009004867 U1, 29.10.2009 | |||
| УСТРОЙСТВО РОЛИКОВОЕ ДЛЯ ВЫДВИЖНОГО ЯЩИКА | 2000 |
|
RU2191534C2 |

