Изобретение относится к электротехнике, а именно к электродвигателям и к механизмам с его использованием.
Известен электродвигатель, см. патент на полезную модель РФ №126533. Электродвигатель с номинальной мощностью 37, 55, 75 и 90 кВт, частотой вращения 250 об/мин, с размерами активных частей: диаметр расточки статора D1 с числом пазов статора диаметр бочки ротора D2 с числом пазов ротора Z2, соотношение диаметров цилиндрической поверхности магнитопровода статора D1/DH1=0,82…0,83, соотношение внутреннего диаметра и числа пазов статора D1/Z1=4,2…4,3 может быть использовано в асинхронных электродвигателях.
К недостаткам можно отнести низкий КПД, связанный с наличием добавочных потерь. Так, ротор имеет направление движения в одну сторону, а сила противодействия действует на статор и направлена, согласно закону Ньютона, в противоположную сторону и уменьшает тем самым КПД.
Известен трехфазный асинхронный двигатель - прототип, который состоит из корпуса с запрессованным в него сердечником, неподвижного статора с обмотками, присоединенных к коробке выводов по схеме звезда или треугольник, и ротора.
К недостаткам известного электродвигателя можно отнести низкий КПД, поскольку статор неподвижно смонтирован в корпусе, то возникающая сила противодействия направлению движения ротора неизбежно уменьшает эффективность его работы, так как согласно третьему закону Ньютона - взаимодействия двух тел друг на друга между собою равны и направлены в противоположные стороны, то сила противодействия есть всегда. Это относится ко всем электродвигателям, сконструированным на одной оси корпуса двигателя и рабочего вала.
Так же, к недостаткам можно отнести, ненадежность конструкции, связанную с неспособностью поддерживать постоянную частоту вращения вала при изменяющихся нагрузках.
Техническим результатом предполагаемого изобретения является устранение недостатков прототипа, в частности создание электродвигателя такой конструкции, которая обеспечивает больший КПД и способна поддерживать постоянную частоту вращения вала при изменяющейся нагрузке, которая работает без возникновения силы противодействия.
Поставленный технический результат достигается использованием сочетания известных, общих с прототипом, признаков включающих корпус со смонтированным в нем, по меньшей мере, одним валом и ротором с обмоткой и новых признаков, заключающихся в том, что корпус электродвигателя выполнен в виде кубической конструкции в которой с каждой стороны корпуса на валах смонтированы роторы в виде усеченного конуса, с основанием меньшего диаметра, при этом образующие боковых поверхностей роторов расположены в корпусе эквидистантно друг другу с зазором между ними, роторы связаны друг с другом внутри корпуса при помощи дополнительного блока-корпуса посредством зубчатых конических зацеплений.
Каждый ротор выполнен в виде каркасной конструкции снабженной кольцом-ограничителем в верхней части усеченного конуса и образующими формирующими сегменты в виде трапеций соединяющими его с основанием.
Каждый ротор выполнен, по меньшей мере, из восьми рабочих электромагнитных сегментов в виде трапеций, широким основанием вверх, последовательно связанных друг с другом и выполненными радиусом равным радиусу ротора.
Зубчатое коническое зацепление внутри дополнительного блока-корпуса выполнено посредством конических шестерен, смонтированных на валах роторов во взаимосвязи друг с другом при помощи, по меньшей мере, четырех промежуточных конических шестерен установленных внутри блока-корпуса на своих валах со свободным вращением вокруг своих осей.
Дополнительный блок-корпус изготовлен в виде кубической конструкции с выполненными отверстиями по центру каждой стороны корпуса для валов роторов, с опорными гнездами для подшипников каждого вала ротора, выполненными с внешних сторон корпуса.
Дополнительный блок-корпус выполнен по величине равной 10-15% от величины корпуса электродвигателя.
Корпус электродвигателя снабжен с каждой стороны крышкой с отверстием по центру для валов, отверстием для монтажа блока электрощеток, и опорным гнездом с внутренней стороны для подшипника.
Каждый ротор выполнен с образующими боковых поверхностей формирующих, относительно друг друга, угол равный 90°.
Новизной предложенного технического решения является выполнение корпуса электродвигателя в виде кубической конструкции в которой с каждой стороны корпуса на валах смонтированы роторы в виде усеченного конуса, с основанием меньшего диаметра, при этом образующие боковых поверхностей роторов расположены в корпусе эквидистантно друг другу с зазором между ними, роторы связаны друг с другом внутри корпуса при помощи дополнительного блока-корпуса посредством зубчатых конических зацеплений.
Так выполнение корпуса электродвигателя в виде кубической конструкции, в которой с каждой стороны корпуса на валах смонтированы роторы, позволяет осуществить саму возможность работы электродвигателя без силы противодействия, так как при движении соседних сторон роторов в противоположные стороны - силы действия роторов складываются, таким образом, благодаря предлагаемой конструкции и расположению роторов силы противодействия нет - она «уходит» в КПД повышая его.
При этом связь роторов друг с другом внутри корпуса при помощи дополнительного блока-корпуса посредством подшипников и зубчатых конических зацеплений, обеспечивает работу предлагаемой конструкции: центрирует валы роторов, синхронизирует их работу надежно фиксирует всю конструкцию, при этом предотвращает вибрацию и смещение валов во время работы электродвигателя, что в совокупности с расположением образующих боковых поверхностей роторов в корпусе эквидистантно друг другу с зазором между ними, позволяет увеличить площадь взаимодействия соседних роторов и поддерживать постоянную скорость вращения валов даже при изменяющихся нагрузках.
При этом выполнение каждого ротора в виде усеченного конуса с основанием меньшего диаметра, образующие боковых поверхностей которых расположены в корпусе эквидистантно друг другу с зазором между ними, позволяет увеличить площадь активной рабочей зоны и обеспечить необходимое расстояние для полноценной магнитной связи и взаимодействия прилегающих друг к другу поверхностей роторов предлагаемой конструкции электродвигателя.
Взаимосвязь роторов друг с другом внутри корпуса при помощи дополнительного блока-корпуса посредством подшипников и зубчатых конических зацеплений обеспечивает синхронное взаимодействие всех роторов и их надежную осевую фиксацию внутри корпуса электродвигателя.
Выполнение каждого ротора, по меньшей мере, из восьми рабочих электромагнитных сегментов в виде трапеций, широким основанием вверх, последовательно установленных друг с другом и выполненными радиусом равным радиусу ротора, позволяет осуществить работу электродвигателя - формировать механическую силу действия, направлять и осуществлять движение ротора посредством подачи электропитания с электронных блоков управления (ЭБУ) в катушки электромагнитных сегментов.
Выполнение каждого ротора в виде каркасной конструкции, снабженной кольцом-ограничителем в верхней части усеченного конуса и образующими формирующими сегменты в виде трапеций соединяющими его с основанием, обеспечивает надежную фиксацию электромагнитных сегментов и усиливает конструкцию, обеспечивая взаимодействие роторов между собой с внешней стороны усеченного конуса.
Выполнение зубчатого зацепления внутри дополнительного блока-корпуса посредством конических шестерен, смонтированных на валах роторов во взаимосвязи друг с другом при помощи, по меньшей мере, четырех промежуточных конических шестерен установленных внутри блока-корпуса на своих валах со свободным вращением вокруг своих осей, обеспечивает синхронное вращение всех роторов, при этом именно промежуточные шестерни обеспечивают реверсную связь и перевод направления вращения шестерен для получения встречного направления вращения соседних сторон роторов. Таким образом, механические силы вращения валов роторов складываются в дополнительном блоке-корпусе в одном направлении, обеспечивая саму возможность работы предлагаемой конструкции электродвигателя.
Выполнение каждого ротора с образующими боковых поверхностей формирующих, относительно друг друга, угол равный 90° обеспечивает взаимодействие всех поверхностей соседних роторов между собой и исключает возможность возникновения сопротивления в работе электродвигателя.
Так выполнение дополнительного блока-корпуса по величине равной 10-15% от величины корпуса электродвигателя обеспечивает оптимальную работу электродвигателя, поскольку если величина дополнительного блока-корпуса будет меньше 10% от величины корпуса электродвигателя, то его технологично сложно изготовить и сложно выдерживать нагрузку на зубья шестерен, которая создается при работе электродвигателя, при этом, если размер дополнительного блока-корпуса больше 15% от величины корпуса электродвигателя, то это уменьшает рабочую поверхность роторов и соответственно уменьшает тягу.
Признаки выполнения дополнительного блока - корпуса в виде кубической конструкции с выполненными отверстиями по центру каждой стороны для валов роторов, с опорными гнездами для подшипников каждого вала ротора, выполненными с внешней стороны корпуса, снабжение корпуса электродвигателя с каждой стороны крышкой с отверстием по центру для валов, отверстием для монтажа блока электрощеток, и опорным гнездом с внутренней стороны для подшипника - являются признаками дополнительными, направленными на раскрытие основных признаков и способствующие достижению поставленного технического результата, а так же способствуют увеличению КПД электродвигателя.
Проведенные патентно-информационные исследования по источникам патентной и научно-технической информации показали отсутствие предложенного в объекте сочетания известных и новых признаков предполагаемого изобретения, что позволяет отнести предложенные признаки к существенным и обладающим новизной.
В связи с тем, что предложенное сочетание признаков не известно из существующего уровня техники и не вытекает из него явным образом и позволяет получить более высокий, неожиданный технический результат, а также неочевидность синергетического эффекта, поскольку только совокупность и взаимосвязь приведенных ранее признаков дает такой положительный эффект, то предлагаемые существенные признаки и их сочетание можно считать имеющими изобретательский уровень. Описание конструкции и работы предлагаемого электродвигателя, в том числе на конкретном примере, позволяет отнести его к промышленно выполнимым.
На фиг. 1 изображена схема расположения валов по сторонам наружного и внутреннего корпусов без роторов и шестерен.
На фиг. 2 схематично изображены четыре ротора, соединенные друг с другом при помощи конических шестерен.
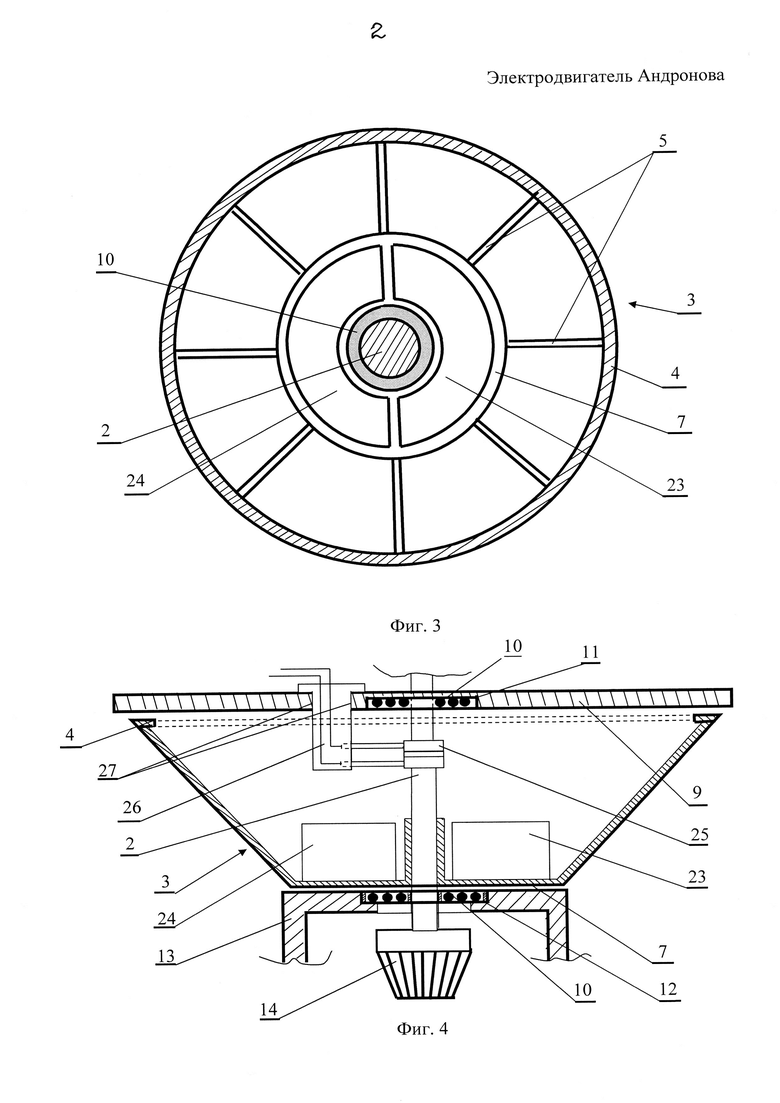
На фиг. 3 показан ротор вид сверху
На фиг. 4 изображен разрез ротора с показом внутренней электрической части.
На фиг 5 представлена схема расположения роторов ориентированных по осям X, Y и Z.
На фиг. 6 представлена схема расположения четырех промежуточных шестерен на валах внутри дополнительного блока-корпуса.
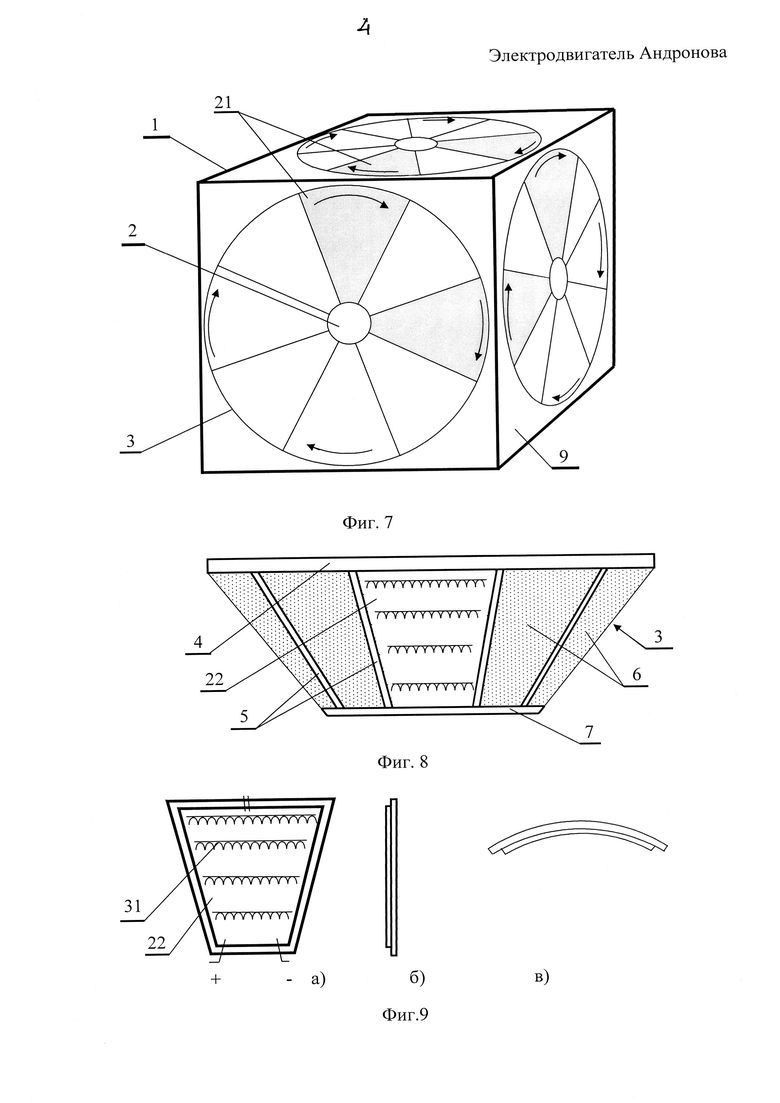
На фиг. 7 схематично показан корпус электродвигателя с роторами.
На фиг. 8 схематично изображен каркас ротора с кольцом-ограничителем.
На фиг. 9 схематично показан электромагнитный сегмент: а) вид спереди, б) вид с боку, в) вид сверху.
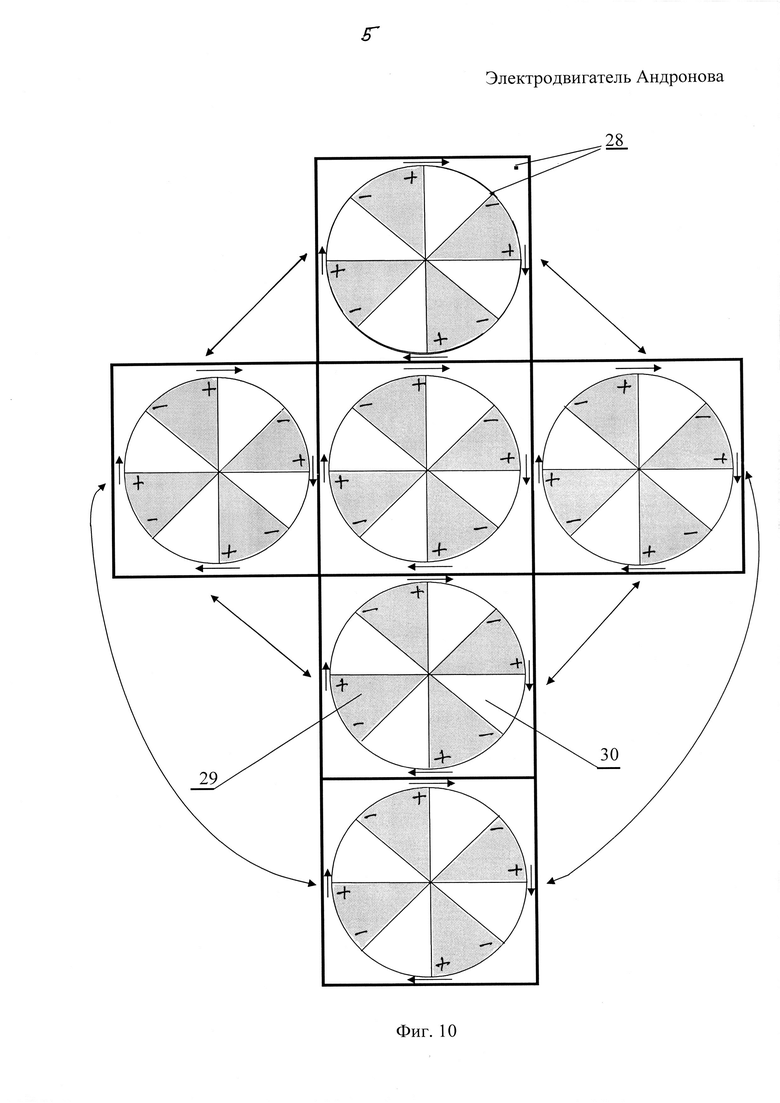
На фиг. 10 показана развертка плоскостей кубической конструкции с указанием взаимодействующих электромагнитных сегментов по сторонам роторов.
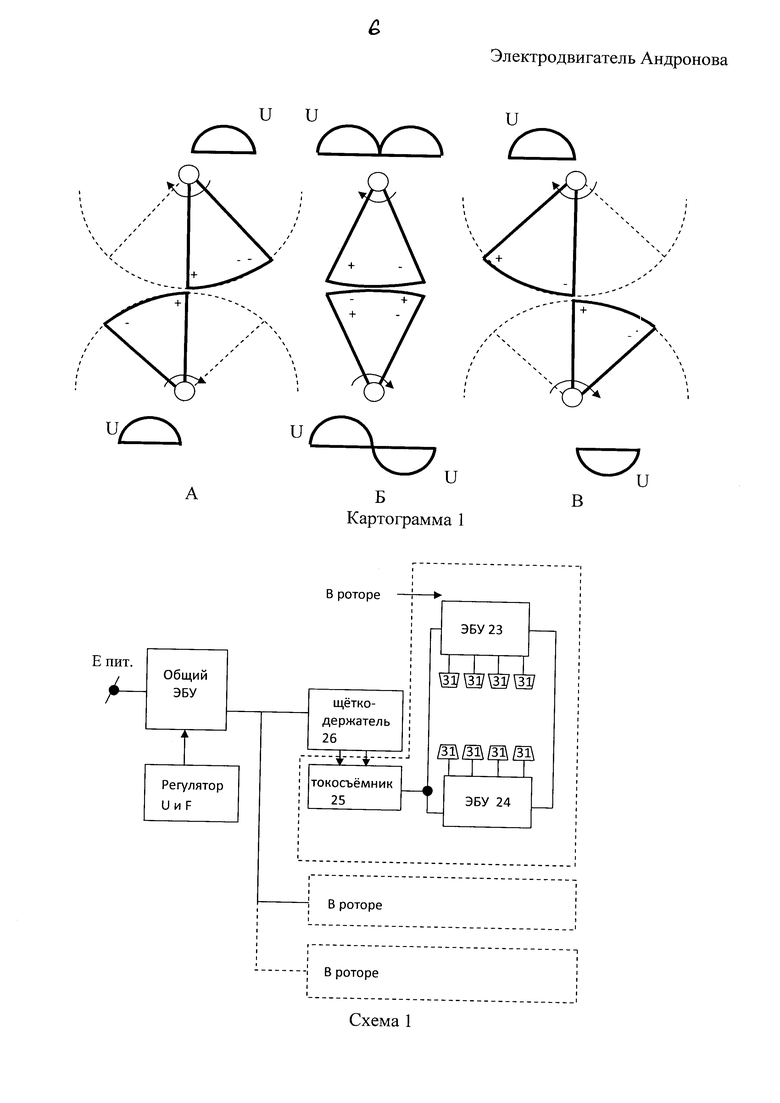
На картограмме 1 показано расположение рабочих сегментов роторов в циклах взаимодействия магнитных потоков.
На схеме 1 показана общая модульная электросхема управления электромагнитными потоками в роторах электродвигателя.
Предлагаемый электродвигатель состоит из корпуса 1 выполненного из прочного материала (латунь, алюминий и др.), выполненного в виде кубической конструкции, в которой с каждой стороны на валах 2 жестко смонтированы роторы 3 в виде каркасной конструкции с кольцом-ограничителем 4 и образующими 5 формирующие окна 6 - в виде трапеций, соединяющими кольцо - ограничитель 4 с основанием 7, при этом валы 2 с роторами 3 вместе с подшипниками 10 с одной стороны, установлены в посадочные гнезда 11, через отверстия 8 в крышках 9 с внутренней стороны. Другая сторона валов роторов с подшипниками 10 и шестернями 14 вставлены в отверстия с посадочными гнездами 12 с внешних сторон дополнительного блока корпуса 13, где шестерни валов роторов сочленяются с промежуточными шестернями 15 на валах 16, которые исходят из внутренних вершин дополнительного блока корпуса 17, и жестко соединены в его центре 18. Шестерни промежуточные свободно вращаются вокруг своих осей и не имеют продольного перемещения по своим валам. В блоке-корпусе происходит сочленение каждой промежуточной шестерни с тремя шестернями роторов, а каждая шестерня ротора с двумя промежуточными шестернями.
При такой комбинации сочлененных всех шестерен между собой, позволяет передавать механическую силу вращения валов роторов друг другу в любом порядке одновременно, при этом вращение валов роторов в одну сторону и синхронно. При этом боковые стороны роторов 19 относительно друг друга передвигаются в противоположные стороны.
Боковые стороны каждого ротора постоянно связаны с другими роторами по образующим расположенным эквидистантно друг другу с зазором  20, который обусловлен техническими возможностями электродвигателя - образующими при подаче напряжения магнитного поля в активную рабочую зону 21 электромагнитных сегментов нечетных групп, 29, роторов. Каждый ротор 3 выполнен, по меньшей мере, с восьмью окнами 6, в которые монтируют электромагнитные сегменты 22 в виде трапеций и изготавливается из электростали с катушками из медного провода в них, 31.
20, который обусловлен техническими возможностями электродвигателя - образующими при подаче напряжения магнитного поля в активную рабочую зону 21 электромагнитных сегментов нечетных групп, 29, роторов. Каждый ротор 3 выполнен, по меньшей мере, с восьмью окнами 6, в которые монтируют электромагнитные сегменты 22 в виде трапеций и изготавливается из электростали с катушками из медного провода в них, 31.
В полости каждого ротора 3 закреплены - электронный блок 23 и электронный блок 24 управления нечетными и четными электромагнитными сегментами роторов. На валах роторов смонтированы токосъемники 25. Блок щеток 26, вставлен в окно 27 в крышках 9 корпуса двигателя 1.
Схема включения электромагнитных сегментов 22 построена таким образом блоками ЭБУ 23 и ЭБУ 24, что электромагнитные поля всегда встречно направлены, и активизированы только в зонах 21 между роторами.
Предлагаемое устройство работает следующим образом:
Первоначально осуществляют сборку электродвигателя механическую и электрическую части, согласно чертежей и электрической схемы. Собранный электродвигатель с подключенным к нему внешнего ЭБУ, схема 1, должен иметь свободное синхронное вращение валов роторов в одну сторону.
Исходное положение электромагнитных сегментов роторов показано на фигуре 10. Зоны электромагнитных сегментов в роторах затонированы и показывают этим нечетные группы 29, а незатонированные - четные группы 30
При включении электродвигателя, с общего ЭБУ напряжение переменного тока синусоидальной формы через ЭБУ 23 подается на катушки нечетных электромагнитных сегментов 29 во всех роторах, фигура 10. Схема 1.
На картограмме 1 показана одна пара затонированных электромагнитных сегментов в двух роторах. Напряжение с ЭБУ 23, поданное на катушки нечетных электромагнитных сегментов (положение А) с небольшим механическим угловым опережением создает магнитные поля между электромагнитными сегментами, которые противоположны по своему значению. Магнитные потоки между ними начнут двигать нечетные электромагнитные сегменты с роторами, навстречу друг другу. Дойдя до положения Б магнитные потоки равны нулю, также, как и синусоидальное напряжение. Далее в одном из пары электромагнитного сегмента происходит перефазирование напряжения, которое возрастает вместе с магнитным потоком. Магнитные потоки опять противоположны по значению.
Стороны роторов продолжат движение до положения электромагнитных сегментов В, по картограмме 1. Электропитание с нечетных электромагнитных сегментов снимается. Все ротора передвинулись на одну восьмую круга.
В активную зону вступают четные 30 электромагнитные сегменты всех роторов. Электропитание на них с переключением полярности в зоне Б картограммы 1 обеспечивает ЭБУ 24. По окончании прохождения зон А, Б, В питание с четных электромагнитных сегментов снимается. В зону 21 снова вступают следующие нечетные электромагнитные сегменты всех роторов. Валы роторов вращаются. Так происходят переключения до завершения полного оборота всех роторов с валами, восемь раз, четыре нечетных и четыре четных, по очереди. Управление магнитными потоками электромагнитных сегментов роторов поддерживает заданную скорость вращения валов роторов при изменяющихся нагрузках. Внутреннее программное обеспечение ЭБУ 23 и ЭБУ 24 контролирует вращение роторов от исходной точки 28 положения роторов, со своевременным включением, перефазировкой, выключением, всех магнитных полей по замкнутому циклу программы и так многократно. Скорость вращения валов роторов зависит от частоты F генерируемого тока на электромагнитные сегменты роторов по формуле:  , где
, где
F - частота генерации синусоидальных напряжений за 1 сек., 8 - количество синусоидальных значений на 1 оборот вала ротора.
Для S 1500 об/мин F ген=200 гц, для S 3000 об/мин F ген.=400 гц.
Повышенная частота генерации тока, создающего магнитные поля между сторонами роторов, положительно сказывается на добротность магнитного поля в электродвигателе между роторами. Параметр мощности определяет внешний ЭБУ величиной напряжения, регулируемой так же, как и частотой генерации. Остановка электродвигателя - снятие электропитания. Следующий пуск электродвигателя только от исходного положения электромагнитных сегментов роторов (фиг. 10) при совмещении установочной метки 28 с меткой на крышке 9 данного ротора, во избежание неправильной работы программ ЭБУ 23 и ЭБУ 24. Сбой в программе ЭБУ 23 из-за нерегламентированного запуска двигателя (не выставлены ротора относительно контрольной метки 28), вызовет непредсказуемое поведение магнитных полей между роторами с резкими скачками тока, что приведет к автоматическому аварийному отключению электропитания двигателя.
В предлагаемой конструкции электродвигателя силы противодействия между рабочим валом и корпусом двигателя нет, нет механической силы противодействия между роторами, нет ее и в дополнительном блоке-корпусе. Механическая сила вращения роторов в электродвигателе полностью направлена на рабочий вал путем сложения механических сил вращения валов роторов посредством шестерен валов, связанных между собой через промежуточные конические шестерни в дополнительном блоке-корпусе. Встречное вращение сторон роторов полностью совпадает с направленным действием электромагнитных полей между сторонами роторов. Основанием для утверждения отсутствия механических сил противодействия служит расположение электромагнитных роторов конической формы в виде усеченного конуса в корпусе электродвигателя на осях X, Y, Z (фиг. 6). Таким образом, электродвигатель такой конструкции обеспечивает больший КПД, способен поддерживать постоянную частоту вращения рабочего вала при изменяющихся нагрузках, и при этом работает без возникновения силы противодействия.
Существующие конструкции электродвигателей на одной оси не учитывают силу противодействия, потому что нет альтернативной механической конструкции электродвигателя. В предлагаемой конструкции электродвигателя совершенно новый вид взаимодействия роторов между собой, данная конструкция показывает, что здесь нет механической силы противодействия равной силе действия роторов.
Область назначения данного электродвигателя: для работы в электротранспорте как с проводным электропитанием, так и с автономным электропитанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель Андронова II | 2024 |
|
RU2841115C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВИХРЕВОЙ ТЕПЛОГЕНЕРАТОР (ВАРИАНТЫ) | 2012 |
|
RU2527545C1 |
| СПОСОБ СЛАБОВИБРАЦИОННОГО СЛУЧАЙНОГО СМЕЩЕНИЯ ГРУЗОВ | 2013 |
|
RU2541579C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПИЩЕВЫХ ПРОДУКТОВ С МАГНИТНЫМ ПРИВОДОМ | 2003 |
|
RU2340274C2 |
| РУЧНОЙ КУЛЬТИВАТОР | 2004 |
|
RU2273975C1 |
| Роторно-поршневой двигатель с неравномерным пульсирующе-вращательным движением главных рабочих органов и механизмом преобразования данного движения в равномерное на основе магнетизма, с функцией предохранения, и с вариантами | 2020 |
|
RU2757083C1 |
| СПОСОБ УПРАВЛЕНИЯ АКСИАЛЬНО-ПОРШНЕВЫМ ДВИГАТЕЛЕМ И АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2016 |
|
RU2628831C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2019 |
|
RU2715952C1 |
| Станок для изготовления пружин | 1985 |
|
SU1256838A1 |
| СПОСОБ УПРАВЛЕНИЯ АКСИАЛЬНО-ПОРШНЕВЫМ ДВИГАТЕЛЕМ И АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2016 |
|
RU2634974C2 |


Изобретение относится к электротехнике, а именно к электродвигателям и к механизмам с его использованием. Технический результат – повышение КПД и обеспечение возможности поддержания постоянной частоты вращения вала при изменяющейся нагрузке. Корпус электродвигателя выполнен в виде кубической конструкции, в которой с каждой стороны корпуса на валах смонтированы роторы в виде усеченного конуса с основанием меньшего диаметра. Образующие боковых поверхностей роторов расположены в корпусе эквидистантно друг другу с зазором между ними. Роторы связаны друг с другом внутри корпуса при помощи дополнительного блока-корпуса посредством зубчатых конических зацеплений. 8 з.п. ф-лы, 12 ил.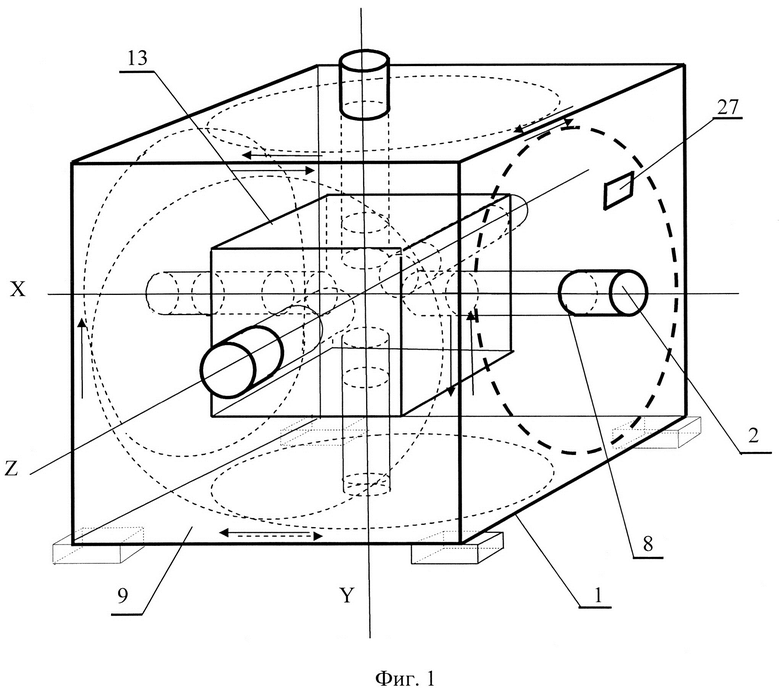
1. Электродвигатель, включающий корпус со смонтированным в нем по меньшей мере одним валом и ротором с обмоткой, отличающийся тем, что корпус электродвигателя выполнен в виде кубической конструкции, в которой с каждой стороны корпуса на валах смонтированы роторы в виде усеченного конуса с основанием меньшего диаметра, при этом образующие боковых поверхностей роторов расположены в корпусе эквидистантно друг другу с зазором между ними, роторы связаны друг с другом внутри корпуса при помощи дополнительного блока-корпуса посредством зубчатых конических зацеплений.
2. Электродвигатель по п. 1, отличающийся тем, что каждый ротор выполнен в виде каркасной конструкции, снабженной кольцом-ограничителем в верхней части усеченного конуса и образующими, формирующими сегменты в виде трапеций, соединяющими его с основанием.
3. Электродвигатель по п. 1, отличающийся тем, что каждый ротор выполнен по меньшей мере из восьми рабочих электромагнитных сегментов в виде трапеций, широким основанием вверх, последовательно связанных друг с другом и выполненных радиусом, равным радиусу ротора.
4. Электродвигатель по п. 1, отличающийся тем, что зубчатое коническое зацепление внутри дополнительного блока-корпуса выполнено посредством конических шестерен, смонтированных на валах роторов во взаимосвязи друг с другом при помощи по меньшей мере четырех промежуточных конических шестерен, установленных на своих валах внутри блока-корпуса со свободным вращением вокруг своих осей.
5. Электродвигатель по п. 1, отличающийся тем, что дополнительный блок-корпус изготовлен в виде кубической конструкции с выполненными отверстиями по центру каждой стороны для валов роторов, с опорными гнездами для подшипников каждого вала ротора, выполненными с внешней стороны корпуса.
6. Электродвигатель по п. 1, отличающийся тем, что дополнительный блок-корпус выполнен по величине, равной 10-15% от величины корпуса электродвигателя.
7. Электродвигатель по п. 1, отличающийся тем, что корпус электродвигателя снабжен с каждой стороны крышкой с отверстием по центру для валов, отверстием для монтажа блока электрощеток и опорным гнездом с внутренней стороны для подшипника.
8. Электродвигатель по п. 1, отличающийся тем, что каждый ротор выполнен с образующими боковых поверхностей, формирующих, относительно друг друга, угол равный 90°.
9. Электродвигатель по п. 1, отличающийся тем, что роторы с валами, расположенными на осях X,Y, Z, складывают все силы действий вращения в одну сторону на выходе из электродвигателя.
| US 6232671 B1, 15.05.2001 | |||
| US 8853977 B1, 07.10.2014 | |||
| US 8759992 B1, 24.06.2014 | |||
| US 4498015 A1, 05.02.1985 | |||
| RU 2015119949 A, 20.12.2016 | |||
| Электродвигатель с электромагнитным подвесом ротора | 1983 |
|
SU1163422A1 |

