Изобретение относится к электрическим машинам, в частности к машинам с магнитными опорами.
Цель изобретения заключается в упрощении конструкции, снижении веса и габаритов двигателя.
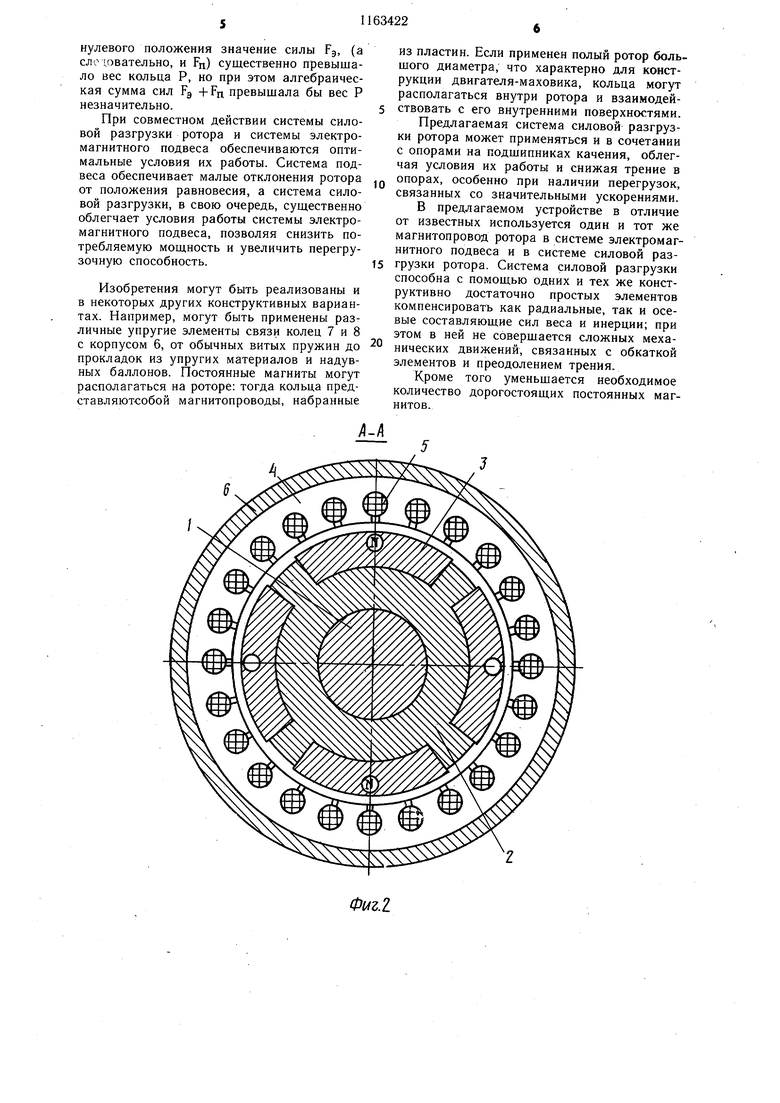
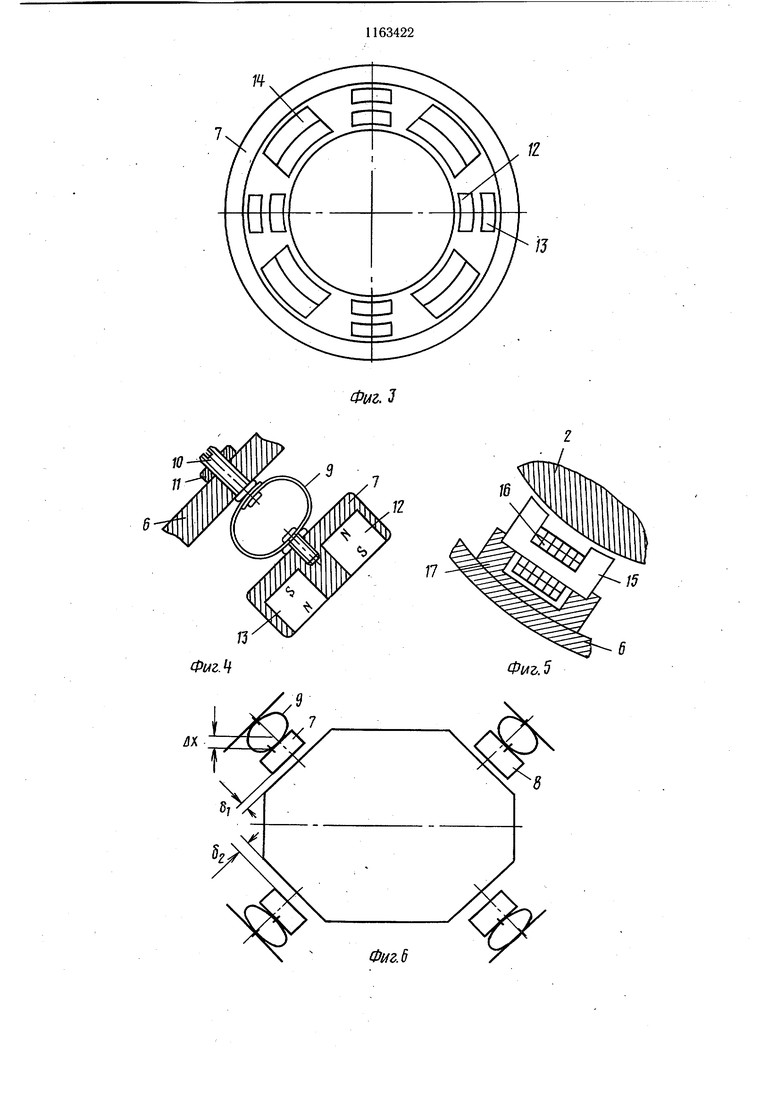
На фиг. 1 представлено предлагаемое устройство, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - подвижный элемент системы силовой разгрузки ротора - кольцо с конической рабочей поверхностью, вид изнутри; на фиг. 4 - вариант упругой связи конического кольца с корпусом устройства при помощи пружины эллиптической формы; на фиг. 5 - положение электромагнита системы подвеса по отношению к ротору; на фиг. 6 - схема взаимного положения активных элементов системы силовой разгрузки ротора при радиальной силе веса; на фиг. 7 - то же, при осевом направлении действия силы веса; на фиг. 8 - графики силы веса ротора, а также электромагнитных и упругих сил, действующих в системе силовой разгрузки ротора, как функции перемещения подвижных элементов этой системы.
На валу 1 электродвигателя закреплен магнитопровод 2, который может быть набран из кольцевых пластин, причем средняя часть магнитопровода, являющаяся активным элементов ротора собственно двигателя, выполнена с цилиндрической рабочей поверхностью, а боковые части - с конической. В пазах цилиндрической части магнитопровода помещены радиально намагниченные постоянные магниты 3, образующие переменно-полюсную систему возбуждения собственно электродвигателя (на фиг. 2 отмечены полюса магнитов 3, обращенные к внутренней поверхности статора). Магнитопровод 4 с помещенной в его пазах обмоткой 5 образуют статор собственно электродвигателя и закреплены в корпусе 6. С корпусом упруго связаны также кольца 7 и 8 с конической поверхностью, обращенной к ротору. Упругая связь осуществляется с помощью пружин 9 эллиптической формы, находящихся в предваритедьно сжатом состоянии и в противоположных точках, прикрепленных к кольцам 7 и 8 и к корпусу 6. Один из вариантов такого закрепления представлен на фиг. 4. Регулировка сжатия пружин 9 может производиться с помощью нажимного винта 10, положение которого затем фиксируется стопорной гайкой 11. Количество пружин, связывающих каждое кольцо с корпусом, ограничено только конструктивными соображениями. Пружины должны, по .возможности, обладать одинаковыми характеристиками и располагаться равномерно по окружности кольца. Можно ограничиться четырьмя пружинами на кольце. Во внутренних пазах кольца располагаются распределенные равномерно по его окружности пары постоянных магнитов 12 и 13, намагниченные так, как это показано на фиг. 4. Между пазами с магни5 тами в кольцах выполнены отверстия 14, через которые пропущены магнитопроводы 15 с катушками 16, принадлежащие к системе электромагнитного подвеса ротора. С помощью переходной немагнитной детали 17
Q магнитопровод 15 крепится к корпусу 6. Раз меры отверстий 14 в кольцах 7 и 8 выбираются таким образом, чтобы в пределах рабочих перемещений колец не было касаний с ними магнитопроводов 15 и обмоток 16. Сами кольца лущче выполнять из немагнит5 ных материалов во избежание появления силового взаимодействия между кольцами и электромагнитами.
Электродвигатель с электромагнитным подвесом ротора работает следующим образом.
Собственно электродвигатель обеспечивает создание крутящего момента и представляет собой вентильный электродвигатель с бесконтактной коммутацией токов в обмотках статора и системой возбуждения,
5 использующей постоянные магниты 3 на роторе. В данной конструкции в системе возбуждения использованы высококоэрцитивные постоянные магниты, что позволяет существенно увеличить воздущный зазор между ротором и магнитопроводом 4, так что
0 этот воздушный зазор много больше максимально возможного радиального отклонения ротора от его центрированного положения, поскольку это отклонение ограничено величиной зазора между магнитопроводом 2 ротора и магнитопроводами 15 системы подвеса. Указанная особенность конструкции обеспечивает условия, когда при незначительных радиальных смещениях ротора относительно его центрированного положения односторонние силы притяжения между ротором и статором собственно электродвигателя практически отсутствуют. В то же время магнитный поток возбуждения в основном замыкается по ротору и магнитопроводу 4, так что не возникает и нежелательного электромагнитного взаимодействия между магнитами системы возбуждения и магнитами колец.
Система электромагнитного подвеса ротора, использующая в качестве силовых
элементов электромагниты с магнитопроводами 15 и обмотками Ш, работает как замкнутая система автоматического регулирования и строится по известным схемам резонансного или активного подвеса.
Система силовой разгрузки ротора содержит упруго связанные с корпусом кольца 7 и 8 с постоянными магнитами 12 и 13, создающими электромагнитные силы притяжения между кольцами и коническими поверхностями магнитопровода ротора. Таким образом, магнитопроводы ротора системы электромагнитиого подвеса и системы силовой разгрузки в этом устройстве полностью конструктивно совмещены. Основные принципы работы системы силовой разгрузки ротора иллюстрируются на фиг. 6 и 7, где схематически изображены только те элементы конструкции, которые имеют отношение к работе этой системы. Ротор изображен в центрированном положении (или, во всяком случае, при наличии только незначительных отклонений от этого положения). В рабочих системах электромагнитного подвеса удержание ротора в таком положении обеспечивается только за счет регулируемых сил притяжения, развиваемых силовыми электромагнитами системы подвеса. Если сила веса ротора действует перпендикулярно к оси вращения (горизонтальное положение осей - фиг. 6), то аналогичное направление имеют и силы веса, действующие на кольца 7 и 8 и заставляющие их перемещаться на расстояние лХ относительно их соосного с ротором положения, так что зазоры Si между кольцами и ротором в верхней части кольца и в нижней части не равны один другому. По мере такого смещения кольца возникают и растут силы одностороннего притяжения между кольцом и ротором, способные в конечном итоге полностью или частично компенсировать силу веса ротора. Указанному смещению колец под действием силы их веса и электромагнитных сил притяжения препятствуют также растущие по мере смещения колец упругие силы сопротивления со стороны пружин 9. В идеальном случае геометрические весовые и электромагнитные параметры элементов системы разгрузки могут быть так рассчитаны, что в установивщемся положении вес ротора может быть полностью скомпенсирован. Механизм работы системы разгрузки аналогичен при вертикальном положении оси вращения ротора (фиг. 7) или при любом Другом промежуточном положении. Примененные в конструкции эллиптические пружины позволяют создавать упругие силы сопротивления смещениям колец и в радиальном, и в осевом направлениях по отнощению к ротору. Таким образом, система силО: вой разгрузки с помощью одних и тех же простых элементов способна уравновешивать и радиальные, и осевые составляющие сил веса, что выгодно отличает ее от известного устройства. Это относится и к компенсации сил инерции,-связанных с наличием механических ускорений, если только силы инерции не изменяются во времени по величине и направлению с достаточно высокой скоростью. Таким образом, система силовой разгрузки ротор:а работает как разомкнутая система автоматического регулирования, реагирующая на вариации возмущающих воздействий - сил веса и инерции, и притом без потребления электроэнергии. Условие нормальной работы системы силовой разгрузки ротора, использующей электромагнитные силы притяжения между ротором и подвижными элементами системы разгрузки, заключается в том, что воздущные зазоры между ротором и магнитопроводами 15 должны быть существенно меньще, чем зазоры между кольцами 7 и 8 и ротором. В этом случае обеспечивается эффективность работы системы электромагнитного подвеса, и в то же время возможные малые отклонения ротора от центрированного положения не приводят к сколько-нибудь заметному изменению сил притяжения, действующих между кольцами и ротором. Применение же высококоэрцитивных постоянных магнитов позволяет получить больщие значения электромагнитных сил даже при значительных зазорах. В таком случае силы одностороннего притяжения, действующие между кольцами и ротором при их несоосном положении, практически воспринимаются как постоянные или медленно меняющиеся составляющие сил, определяющих работу системы силовой разгрузки ротора. На фиг. 8 нулевому значению отклонения ДХ колец 7 и 8 соответствует их центрированное положение относительно ротора. Значения электромагнитной силы Fj, силы веса кольца Р и упругой силы пружин FH считаются положительными, если их направление совпадает с направлением отклонения АХ. Сила F9 является силой притяжения кольца к ротору, сила Fn- противоположная по направлению упругая сила сопротивления пружин, которая при любом отклонении ДХ должна по абсолютной величине превышать Fg. Условие равновесия кол ьца РЭ, Ч- Fn + Р 0. В этом соотношении слагаемые могут иметь различные знаки и представляют собой проекции соответствующих сил на направление перемещения. В таком случае установившееся значение перемещения Д X кольца соответствует точке а на фиг. 8 при значениях упругой силы Fg и электромагнитной силы FJ. Следовательно, обратная по направлению .сила притяжения ротора к кольцу также равна F.. Она и компенсирует частично силу веса ротора и может существенно превышать вес кольца Р. Последнее необходимо, так как кольца должны быть легче самого ротора. Сумг 1арное воздействие двух колец на ротор может привести и к полному его уравновешиванию. Для того, чтобы электромагнитная сила, уравновешивающая ротор, была существенно больще веса кольца, требуется, чтобы при предельно допустимом отклонении кольца от нулевого положения значение силы Fg, (а ело ювательно, и Гц) существенно превышало вес кольца Р, но при этом алгебраическая сумма сил РЭ +FH превышала бы вес Р незначительно. При совместном действии системы силовой разгрузки ротора и системы электромагнитного подвеса обеспечиваются оптимальные условия их работы. Система подвеса обеспечивает малые отклонения ротора от положения равновесия, а система силовой разгрузки, в свою очередь, существенно облегчает условия работы системы электромагнитного подвеса, позволяя снизить потребляемую мощность и увеличить перегрузочную способность. Изобретения могут быть реализованы и в некоторых других конструктивных вариантах. Например, могут быть применены различные упругие элементы связи колец 7 и 8 с корпусом 6, от обычных витых пружин до прокладок из упругих материалов и надувных баллонов. Постоянные магниты могут располагаться на роторе: тогда кольца представляютсобой магнитопроводы, набранные из пластин. Если применен полый ротор большого диаметра, что характерно для конструкции двигателя-маховика, кольца могут располагаться внутри ротора и взаимодействовать с его внутренними поверхностями. Предлагаемая система силовой разгрузки ротора может применяться и в сочетании с опорами на подшипниках качения, облегчая условия их работы и снижая трение в опорах, особенно при наличии перегрузок, связанных со значительными ускорениями. В предлагаемом устройстве в отличие от известных используется один и тот же магнктопровод ротора в системе электромагнитного подвеса и в системе силовой разгрузки ротора. Система силовой разгрузки способна с помощью одних и тех же конструктивно достаточно простых элементов компенсировать как радиальные, так и осевые составляющие сил веса и инерции; при этом в ней не соверщается сложных механических движений, связанных с обкаткой элементов и преодолением трения. Кроме того уменьшается необходимое количество дорогостоящих постоянных магнитов.
П
Фиг. 3
/IX
Фмг.6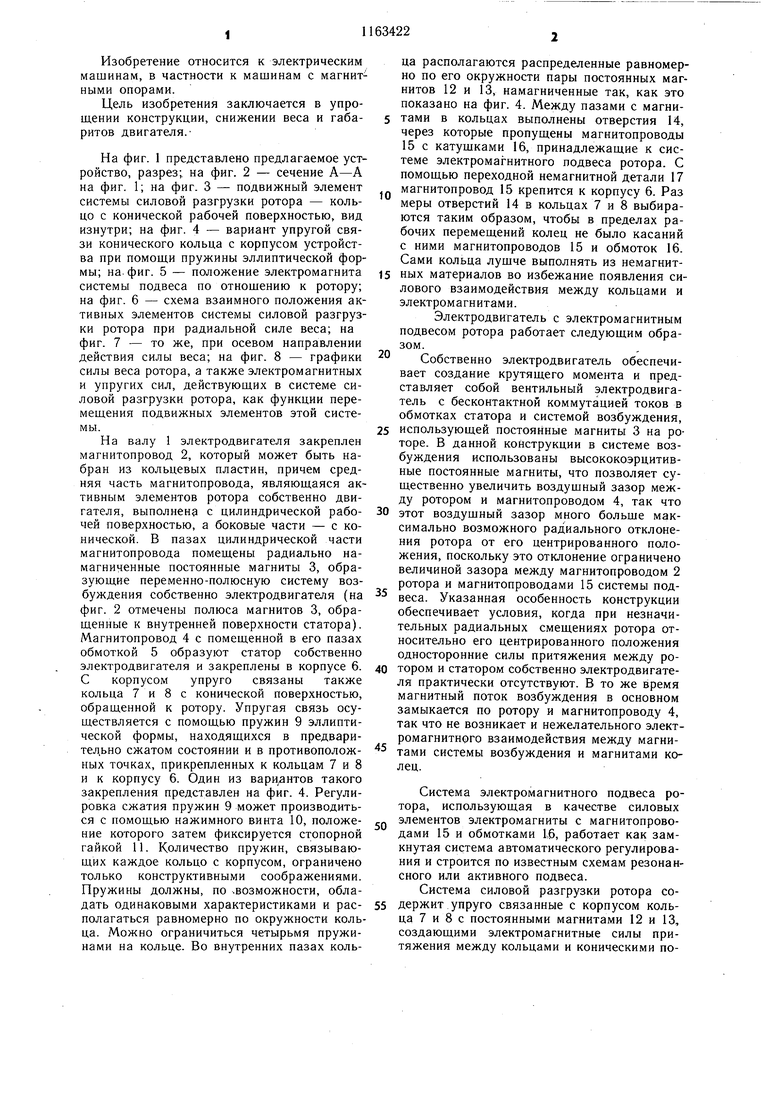

| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель | 1988 |
|
SU1658284A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| РЕГУЛИРУЕМАЯ МАГНИТОДИНАМИЧЕСКАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2009 |
|
RU2398977C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| Электромагнитный подвес двигателя-маховика | 1986 |
|
SU1394334A1 |
| Дисковый насос | 2019 |
|
RU2716100C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
1. ЭЛЕКТРОДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА, содержащий корпус, статор, ферромагнитный ротор с постоянными магнитами, систему электромагнитного подвеса ротора, имеющую электромагниты с полюсами, и систему разгрузки подвеса от сил веса и инерции, включающую в себя подвижные элементы и установленные на них магниты, отличающийся тем, что, с целью упрощения конструкции, снижения веса и габаритов двигателя, подвижные элементы выполнены в виде расположенных снаружи ротора колец, связанных с корпусом при помощи упругих элементов, а образенные одна к другой поверхности колец и ротора выполнены коническими. 2.Электродвигатель по п. 1, отличающийся тем, что упругие элементы выполнены в виде эллиптических пружин, связанных с корпусом регулировочными винтами. 3.Электродвигатель по п. 1, отличающийся тем, что в кольцах между постоянными магнитами выполнены отверстия, в которых р размещены полюса электромагнитов системы (Л электромагнитного подвеса ротора. 05 оо NU to tN3
| Электродвигатель | 1978 |
|
SU748702A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
