ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройствам расходомера Кориолиса и способам, и в частности к устройствам расходомера Кориолиса и способам для определения операционных порогов для потока многофазной текучей среды.
УРОВЕНЬ ТЕХНИКИ
Вибрационные трубопроводные датчики, такие как массовые расходомеры Кориолиса и вибрационные денситометры, обычно функционируют посредством регистрации движения колеблющегося трубопровода, который содержит текущий материал. Свойства, связанные с материалом в трубопроводе, такие как массовый расход, плотность и т.п., могут быть определены обработкой измерительных сигналов, принятых от преобразователей движения, связанных с трубопроводом. Колебательные моды колеблющейся заполненной материалом системы обычно подвергаются влиянию объединенной массы, жесткостью, и свойствами демпфирования заполненного трубопровода и свойствами содержащегося в нем материала.
Типичный массовый расходомер Кориолиса включает в себя один или несколько трубопроводов (также называемых расходомерными трубками), которые встраиваются в линию магистрального трубопровода или в другую транспортную систему, и пропускают через себя материал в системе, например, текучие среды, шлаки, эмульсии, и т.п.. Каждый трубопровод может рассматриваться как имеющий ряд собственных колебательных мод, включающих в себя, например, простые изгибные, крутильные, радиальные, и моды связанного типа. В обычном применении метода Кориолиса для измерения массового расхода, трубопровод возбуждается на одной или нескольких колебательных модах, когда материал течет через трубопровод, и движение трубопровода измеряется в точках, разнесенных вдоль трубопровода. Возбуждение обычно обеспечивается приводом, например, электромеханическим устройством, таким как привод с линейной обмоткой, который возмущает трубопровод периодическим образом. Массовый расход может быть определен измерением времени задержки или разности фаз между перемещениями в местоположениях преобразователя. Два или несколько таких преобразователей (или тензометрических датчиков) обычно используются для измерения колебательного отклика расходомерных трубопроводов, и обычно располагаются выше и ниже по потоку относительно привода. Аппаратура принимает сигналы от тензометрических датчиков и обрабатывает сигналы для получения измерения массового расхода.
Расходомеры могут использоваться для выполнения измерений массового расхода для самых разнообразных протекающих текучих сред. Одна из областей, в которой потенциально могут использоваться расходомеры Кориолиса - это измерения расхода в нефтяных и газовых скважинах. Продукт таких скважин может содержать многофазный поток, включающий в себя нефть или газ, но также и включающий в себя другие компоненты, включая воду и воздух, например, и/или твердые вещества. Естественно, очень желательно, чтобы измерение расхода было насколько возможно точным, даже для таких многофазных потоков.
Измерители Кориолиса обеспечивают высокую точность для однофазных потоков. Однако, когда расходомер Кориолиса используется для измерения многофазных текучих сред, например, текучих сред, включающих в себя вовлеченный газ, точность измерителя может быть значительно снижена. Это также справедливо для потоков с вовлеченными твердыми веществами и для потоков текучих сред со смешанными фазами, например, когда углеводородные текучие среды содержат воду.
Вовлеченный газ обычно присутствует в виде пузырьков в текущем материале. Размер пузырьков может варьироваться в зависимости от количества имеющегося воздуха, давления протекающего материала, и температуры. Соответственный и существенный источник ошибки возникает в результате нарушения сплошности текучей среды. Нарушение сплошности текучей среды возникает из-за движения газовых пузырьков относительно жидкости в результате колебаний трубопровода. Относительное движение газовых пузырьков в жидкости задается выталкивающей силой, которая подобна силе, заставляющей пузырьки подниматься к поверхности под влиянием гравитации. Однако, в колеблющемся трубопроводе, именно ускорение колеблющегося трубопровода заставляет пузырьки перемещаться с ускорением, большим гравитационного ускорения. Поскольку плотная текучая среда имеет большую массу, чем легкие пузырьки, пузырьки имеют большее ускорение, чем текучая среда в направлении ускорения трубопровода. Вследствие большего ускорения пузырьков, при каждом колебании расходомерного трубопровода, пузырьки двигаются дальше, чем расходомерный трубопровод. Кроме того, движение пузырьков заставляет некоторую часть текучей среды двигаться меньше, чем расходомерный трубопровод. В этом основа проблемы нарушения сплошности. В результате текучая среда, которая имеет меньшую амплитуду колебаний, имеет меньшее ускорение Кориолиса и передает меньшую силу Кориолиса на расходомерный трубопровод, чем это было бы в отсутствии пузырьков. Это приводит к занижаемым расходу и параметрам плотности (отрицательный расход и ошибки измерения плотности), когда присутствует вовлеченный газ. Компенсация нарушения сплошности текучей среды затруднена, поскольку имеется несколько факторов, которые определяют, насколько пузырьки перемещаются относительно текучей среды. Очевидный фактор - это вязкость текучей среды. В очень вязкой текучей среде, пузырьки (или частицы) фактически закрепляются на месте в текучей среде и приводят к небольшим ошибкам определения расхода. На подвижность пузырьков также влияет размер пузырьков. Сопротивление перемещению пузырька пропорционально площади поверхности, тогда как выталкивающая сила пропорциональна объему. Поэтому, очень маленькие пузырьки имеют высокое отношение сопротивления перемещению к выталкивающей силе и имеют тенденцию двигаться вместе с окружающей текучей средой. Маленькие пузырьки впоследствии приводят к малым ошибкам. И наоборот, большие пузырьки имеют тенденцию не двигаться вместе с текучей средой и приводят к большим ошибкам. То же самое справедливо для частиц. Малые частицы имеют тенденцию двигаться вместе с текучей средой и приводят к малым ошибкам.
Разность плотности между текучей средой и газом представляет собой другой фактор, который может давать вклад в погрешность измерений расходомера. Выталкивающая сила пропорциональна разности плотности между текучей средой и газом. Газ высокого давления может иметь достаточно высокую плотность, чтобы влиять на выталкивающую силу и уменьшить эффект нарушения сплошности.
В дополнение к ошибкам измерения, влияние многофазного потока на измерители Кориолиса усиливается демпфированием расходомерного трубопровода, приводя к уменьшению амплитуды колебаний расходомерного трубопровода. Как правило, электронный измеритель компенсирует это уменьшение амплитуды, увеличивая энергию привода, или усиление привода, для поддержания амплитуды. Даже очень малые количества газа могут привести к большому увеличению усиления привода.
Для коррекции ошибок, обусловленных многофазным потоком, используются измеренные для однофазного потока (только жидкость) переменные, включающие в себя плотность, массовый расход, и объемный расход - эти значения обозначаются как опорные значения. Опорные значения используются во время многофазного потока для замены или повышения точности измеряемых переменных. В настоящее время, опорные значения определяются в задаваемой пользователем точке до того, как появятся многофазные условия.
Ранее, усиление привода использовалось для определения того, действительно ли в измерителе имеется многофазный поток. Если усиление привода измерителя оказывается выше некоторого порога, то текучая среда в измерителе рассматривается как многофазный поток, и может быть предпринято корректирующее действие для улучшения точности измеренных значений. В измерителях техники предшествующего уровня используется значение по умолчанию для порога усиления привода. Практически, значение по умолчанию должно быть установлено умеренно высоким, так, чтобы оно работало для большинства применений. Это должно быть сделано по трем причинам: (1) Каждый измеритель Кориолиса имеет различное базовое усиление привода. Именно усиление привода требуется для управления расходомерным трубопроводом в случае исключительно однофазных потоков. Вследствие этого, усиление привода должно быть достаточно большим, чтобы действовать для каждого измерителя. Например, типичное номинальное усиление привода для одного семейства измерителей может быть 2%, тогда как номинальное значение для другого семейства измерителей может быть 20%. Это номинальное значение зависит от многих соображений, включающих в себя силу и конструкцию магнита, конструкцию катушки, и размер/жесткость измерителя; (2) Исключительно жидкие многокомпонентные смеси, составленные из одной или нескольких жидкостей различной плотности, будут иметь тот же самый эффект нарушения сплошности как газовые и жидкие текучие среды, хотя намного меньший. Ошибки, главным образом, незначительны в исключительно жидком многокомпонентном потоке, но могут все же иметься незначительные увеличения усиления привода, которые не должны быть приписаны газу. И снова, порог должен быть достаточно высоким, чтобы не принять исключительно жидкий поток как газовый и жидкий потоки; и (3) Для некоторых применений, может вообще не быть периодов чистой жидкости, на которых основывались бы опорные значения. Однако, часто имеются периоды с основной жидкостью, когда могут существовать только малые следы газа. Порог усиления привода устанавливается достаточно высоким, так, чтобы эти периоды были обработаны как чистая жидкость, чтобы могли быть созданы опорные значения, и периоды с очень высоким содержанием газа могли быть скорректированы. Значение по умолчанию работает для некоторых применений. Однако, для применений, где могут быть только малые количества газа, входящего в измеритель, порог значения по умолчанию может быть слишком высоким. Вследствие спорадического характера усиления привода, и того, что потенциал, который управляет порогом усиления, устанавливается слишком высоким, этот способ не всегда производит опорные значения из периодов с минимальным содержанием газа или вообще без газа. Для применений, где всегда имеется достаточно газа, так, что усиление привода никогда не падает ниже порога, порог значения по умолчанию оказывается слишком низким.
В случаях, где значение порога по умолчанию не является подходящим, оператор должен вручную сконфигурировать расходомер для использования более точного значения. Этот процесс требует, чтобы оператор собирал и осуществлял мониторинг данных от измерителя и вручную установил новое пороговое значение. Если технологические условия изменяются со временем, то этот порог может нуждаться в новой регулировке. Этот процесс требует периодичности и является дорогостоящим. Кроме потраченного впустую времени, имеются также правила техники безопасности, которые иногда препятствуют удобному использованию ноутбука для соединения с измерителями в поле.
В данной области техники сохраняется потребность в вибрационном расходомере, который уменьшает проблемы, связанные с установкой соответствующего порога усиления привода для работы с многофазным потоком. Данные варианты реализации предоставляют способы, используемые для определения идеального порога. Кроме того, эти варианты реализации раскрывают, как часто выводить данные, и как часто пробовать находить соответственные значения данных, таких как опорные значения, например.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с вариантом реализации предоставляется способ определения порога усиления привода для вибрационного расходомера. Способ содержит помещение технологической текучей среды в вибрационный расходомер и определение первого предварительно определенного порога усиления привода. Сигнал усиления привода контролируется в течение предварительно определенного периода времени, и в течение этого предварительно определенного периода времени определяются нижние точки в сигнале усиления привода. Второй порог усиления привода определяется на основании достижения предварительно определенного числа случаев нижних точек сигнала усиления привода.
Электронный измеритель для расходомера, выполненный с возможностью приема технологической текучей среды, предоставляется в соответствии с вариантом реализации. Электронный измеритель содержит интерфейс, выполненный с возможностью связи со сборкой датчика расходомера и приема колебательного отклика, и систему обработки, связанную с интерфейсом. Система обработки содержит программу определения порога усиления привода, выполненную с возможностью определения первого предварительно определенного порога усиления привода и мониторинга сигнала усиления привода в течение предварительно определенного периода времени. Нижние точки в сигнале усиления привода определяются в течение предварительно определенного периода времени. Второй порог усиления привода определяется на основании достижения предварительно определенного числа случаев нижних точек сигнала усиления привода.
АСПЕКТЫ ИЗОБРЕТЕНИЯ
В соответствии с аспектом, предоставляется способ определения порога усиления привода для вибрационного расходомера. Способ содержит: размещение технологической текучей среды в вибрационном расходомере; определение первого предварительно определенного порога усиления привода; мониторинг сигнала усиления привода в течение предварительно мониторинга времени; определение нижних точек в сигнале усиления привода в течение предварительно определенного периода времени; и определение второго порога усиления привода на основании достижения предварительно определенного числа случаев нижних точек сигнала усиления привода.
Предпочтительно, способ содержит этап замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода.
Предпочтительно, способ содержит этап регистрации, по меньшей мере, одного опорного значения в течение периодов, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода.
Предпочтительно, способ содержит этап усреднения значений сигналов усиления привода, зарегистрированных в течение каждого случая, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода.
Предпочтительно, способ содержит этап регистрации каждого случая, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода, только если сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода для предварительно определенного периода времени.
Предпочтительно, по меньшей мере, одно опорное значение содержит, по меньшей мере, одно из расхода и плотности технологической текучей среды.
Предпочтительно, предварительно определенный период времени для мониторинга сигнала усиления привода содержит скользящее окно.
Предпочтительно, способ содержит, этап добавления постоянного значения, по меньшей мере, к одному из первого предварительно определенного порога усиления привода и второго предварительно определенного порога усиления привода.
Предпочтительно, способ содержит этап: вычисления сигнала усиления привода, причем  , где: Drive Target - заданное значение амплитуды трубопровода; Max(LPO, RPO) - максимум тензометрического напряжения между левым и правым тензометрическими датчиками; и λ - частота колебаний расходомерных трубопроводов.
, где: Drive Target - заданное значение амплитуды трубопровода; Max(LPO, RPO) - максимум тензометрического напряжения между левым и правым тензометрическими датчиками; и λ - частота колебаний расходомерных трубопроводов.
Предпочтительно, этап замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так, что первый предварительно определенный порог усиления привода заменяется средним значением для второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
Предпочтительно, этап замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так, что первый предварительно определенный порог усиления привода заменяется минимумом из второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
В соответствии с аспектом, предоставляется электронный измеритель для расходомера. Расходомер выполнен с возможностью приема технологической текучей среды, и электронный измеритель содержит интерфейс, выполненный с возможностью связи со сборкой датчика расходомера и приема колебательного отклика. Система обработки, связанная с интерфейсом, содержит программу определения порога усиления привода, выполненную с возможностью: определения первого предварительно определенного порога усиления привода; мониторинга сигнала усиления привода в течение предварительно определенного периода времени; определения нижних точек в сигнале усиления привода в течение предварительно определенного периода времени; и определения второго порога усиления привода на основании достижения предварительно определенного числа случаев нижних точек сигнала усиления привода.
Предпочтительно, программа определения порога усиления привода выполнена с возможностью замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода.
Предпочтительно, программа определения порога усиления привода выполнена с возможностью регистрации, по меньшей мере, одного опорного значения в течение периодов, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода.
Предпочтительно, программа определения порога усиления привода выполнена с возможностью усреднения значений сигналов усиления привода, зарегистрированных в течение каждого случая, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода.
Предпочтительно, программа определения порога усиления привода выполнена с возможностью определения нижних точек в сигнале усиления привода в течение предварительно определенного времени, только если сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода для предварительно определенного периода времени.
Предпочтительно, по меньшей мере, одно опорное значение содержит, по меньшей мере, одно из расхода и плотности технологической текучей среды.
Предпочтительно, предварительно определенный период времени для мониторинга сигнала усиления привода содержит скользящее окно.
Предпочтительно, программа определения порога усиления привода выполнена с возможностью добавления постоянного значения, по меньшей мере, к одному из первого предварительно определенного порога усиления привода и второго предварительно определенного порога усиления привода.
Предпочтительно, программа определения порога усиления привода выполнена с возможностью вычисления сигнала усиления привода, причем , где: Drive Target - заданное значение амплитуды трубопровода; Max(LPO, RPO) - максимум тензометрического напряжения между левым и правым тензометрическими датчиками; и λ - частота колебаний расходомерных трубопроводов.
Предпочтительно, замена первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так, что первый предварительно определенный порог усиления привода заменяется средним значением для второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
Предпочтительно, замена первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так, что первый предварительно определенный порог усиления привода заменяется минимумом из второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 изображает расходомер, содержащий сборку измерителя и электронный измеритель.
Фиг.2 - блок-схема электронного измерителя в соответствии с вариантом реализации изобретения.
Фиг.3 - график определения порога усиления типового привода.
Фиг.4 - график типовой регистрации усиления привода со временем.
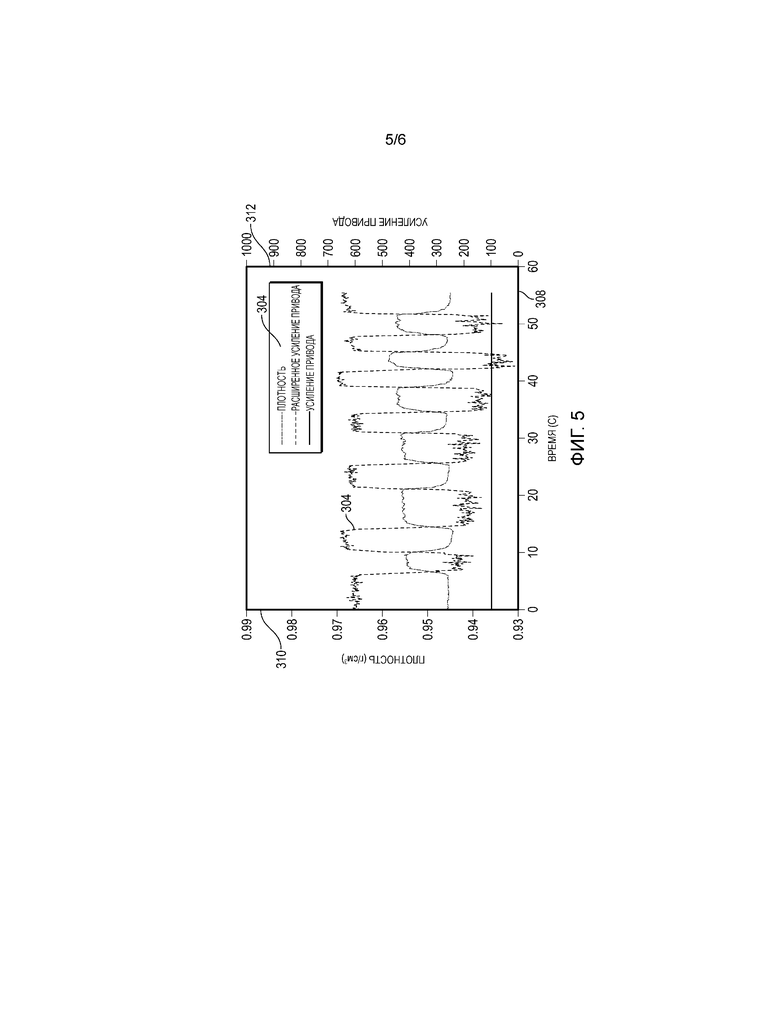
Фиг.5 - график типового выполнения расширенного усиления привода.
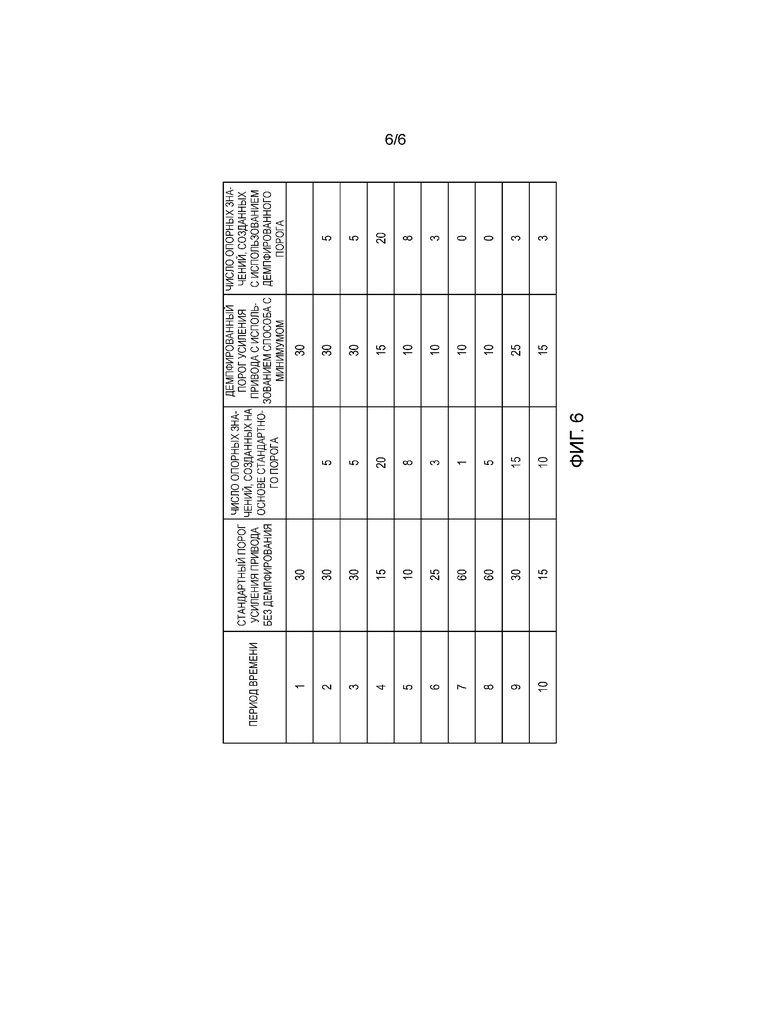
Фиг.6 - таблица варианта реализации с характерным демпфированием усиления привода.
ПОДРОБНОЕ ОПИСАНИЕ
Чертежи на Фиг.1-6 и нижеследующее описание демонстрируют конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант изобретения. С целью пояснения принципов изобретения, некоторые обычные объекты были упрощены или исключены. Специалистам в данной области техники будут очевидны возможные вариации этих примеров, которые находятся в пределах объема притязаний изобретения. Специалистам в данной области техники будет очевидно, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множественные вариации изобретения. Таким образом, изобретение не ограничивается описанными ниже конкретными примерами, но только пп. формулы и их эквивалентами.
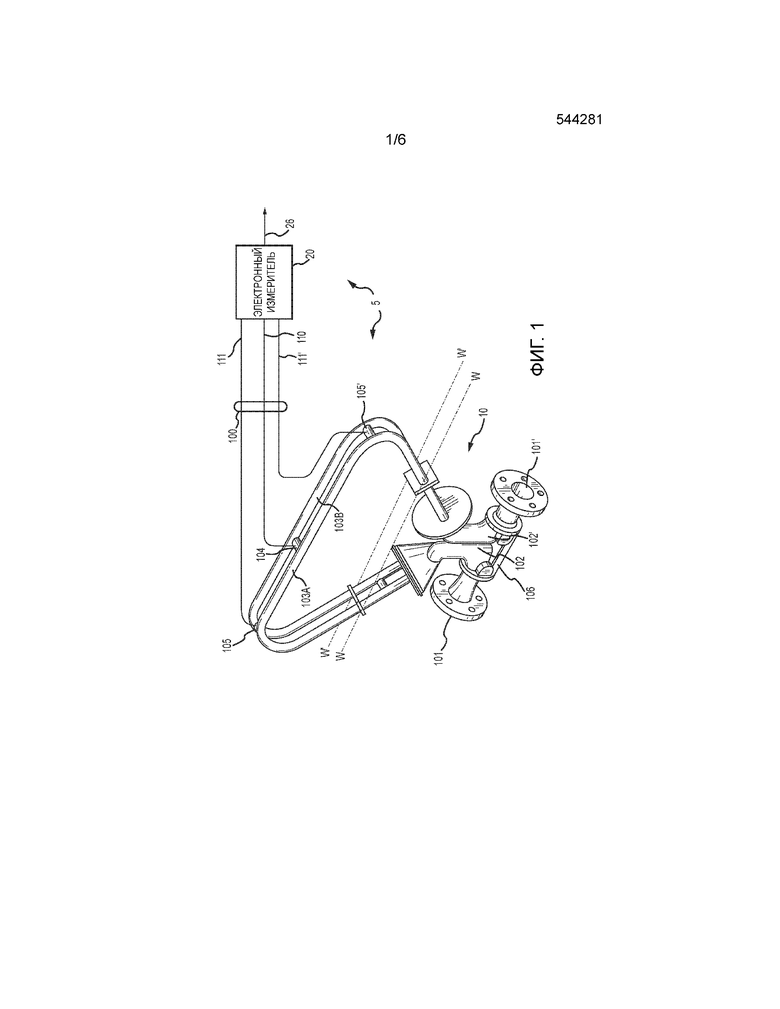
На Фиг.1 показан расходомер 5 в соответствии с вариантом реализации. Расходомер 5 содержит сборку 10 датчика и электронный измеритель 20. Электронный измеритель 20 соединяется со сборкой 10 датчика посредством кабельных соединений 100 и выполнен с возможностью предоставления измерений одного или нескольких из плотности, массового расхода, объемного расхода, суммарного массового расхода, температуры, или для предоставления других измерений или для получения другой информации по каналу 26 связи. Расходомер 5 может содержать массовый расходомер Кориолиса. Специалистам в данной области техники должно быть очевидным, что расходомер 5 может содержать расходомер 5 любого типа, независимо от числа приводов, тензометрических датчиков, расходомерных трубопроводов, или задействованной колебательной моды.
Сборка 10 датчика включает в себя пару фланцев 101 и 101', манифольды 102 и 102', привод 104, тензометрические датчики 105 и 105' и расходомерные трубопроводы 103A и 103B. Привод 104 и тензометрические датчики 105 и 105' присоединяются к расходомерным трубопроводам 103A, 103B.
Фланцы 101 и 101' прикреплены к манифольдам 102 и 102'. Манифольды 102 и 102' могут быть прикреплены к противоположным концам проставки 106 в некоторых вариантах реализации. Проставка 106 поддерживает интервал между манифольдами 102 и 102'. Когда сборка 10 датчика вставляется в систему магистрального трубопровода (не показана), которая транспортирует измеряемый технологическая текучая среда, то технологическая текучая среда входит в сборку 10 датчика через фланец 101, проходит через впускной манифольд 102, где весь технологическая текучая среда направляется в трубопроводы 103A и 103B, протекает через трубопроводы 103A и 103B, и назад в выпускной манифольд 102', где он выходит из сборки 10 датчика через фланец 101'.
Технологическая текучая среда может содержать жидкость. Технологическая текучая среда может содержать газ. Технологическая текучая среда может содержать многофазную текучую среду, такой как жидкость, включающая в себя вовлеченные газы и/или вовлеченные твердые вещества. Расходомерные трубопроводы 103A и 103B выбираются и соответственно устанавливаются на впускном манифольде 102 и на выпускном манифольде 102′ так, чтобы иметь по существу то же самое массовое распределение, моменты инерции, и упругие модули вокруг изгибных осей W-W и W′-W′, соответственно. Расходомерные трубопроводы 103A и 103B простираются наружу от манифольдов 102 и 102′ по существу параллельным образом.
Расходомерные трубопроводы 103A и 103B приводятся в движение приводом 104 в противоположных направлениях вокруг соответствующих изгибных осей W и W′ и на так называемой первой несинфазной изгибной моде вибрационного расходомера 5. Привод 104 может содержать одну из многих известных структур, например, магнит, установленный на расходомерном трубопроводе 103A и противостоящую катушку, установленную на расходомерном трубопроводе 103B. Переменный ток проходит через противостоящую катушку, заставляя оба трубопровода колебаться. Подходящий сигнал привода подается электронным измерителем 20 на привод 104 через проводное соединение 110. Другие устройства привода также предполагаются, и также находятся в пределах объема притязаний описания и формулы.
Электронный измеритель 20 принимает сигналы датчика по кабельным соединениям 111 и 111′, соответственно. Электронный измеритель 20 производит сигнал привода и подает его на соединение 110, что заставляет привод 104 возбуждать колебания расходомерных трубопроводов 103A и 103B. Другие устройства датчика также предполагаются, и также находятся в пределах объема притязаний описания и формулы.
Электронный измеритель 20 обрабатывает сигналы левой и правой скорости от тензометрических датчиков 105 и 105′ для вычисления расхода, среди прочего. Канал 26 связи предоставляет входное и выходное средство, которое позволяет электронному измерителю 20 взаимодействовать с оператором или с другими электронными системами. Описание Фиг.1 предоставляется только в качестве примера функционирования расходомера и не предназначено для ограничения принципов настоящего изобретения.
Электронный измеритель 20 в одном варианте реализации выполнен с возможностью возбуждения колебаний расходомерных трубопроводов 103A и 103B. Колебания возбуждаются приводом 104. Электронный измеритель 20 дополнительно принимает образующиеся сигналы колебаний от тензометрических датчиков 105 и 105′. Сигналы колебаний содержат колебательный отклик расходомерных трубопроводов 103A и 103B. Электронный измеритель 20 обрабатывает колебательный отклик и определяет частотный отклик и/или разность фаз. Электронный измеритель 20 обрабатывает колебательный отклик и определяет одно или несколько измерений расхода, включая массовый расход и/или плотность технологической текучей среды. Другие параметры колебательного отклика и/или измерений расхода также предполагаются и находятся в пределах притязаний описания и формулы.
В одном варианте реализации, расходомерные трубопроводы 103A и 103B содержат по существу U-образные расходомерные трубопроводы, как это показано. Альтернативно, в других вариантах реализации, устьевое измерительное устройство может содержать по существу прямые расходомерные трубопроводы. Дополнительные формы и/или конфигурации расходомера также могут использоваться и находятся в пределах притязаний описания и формулы.
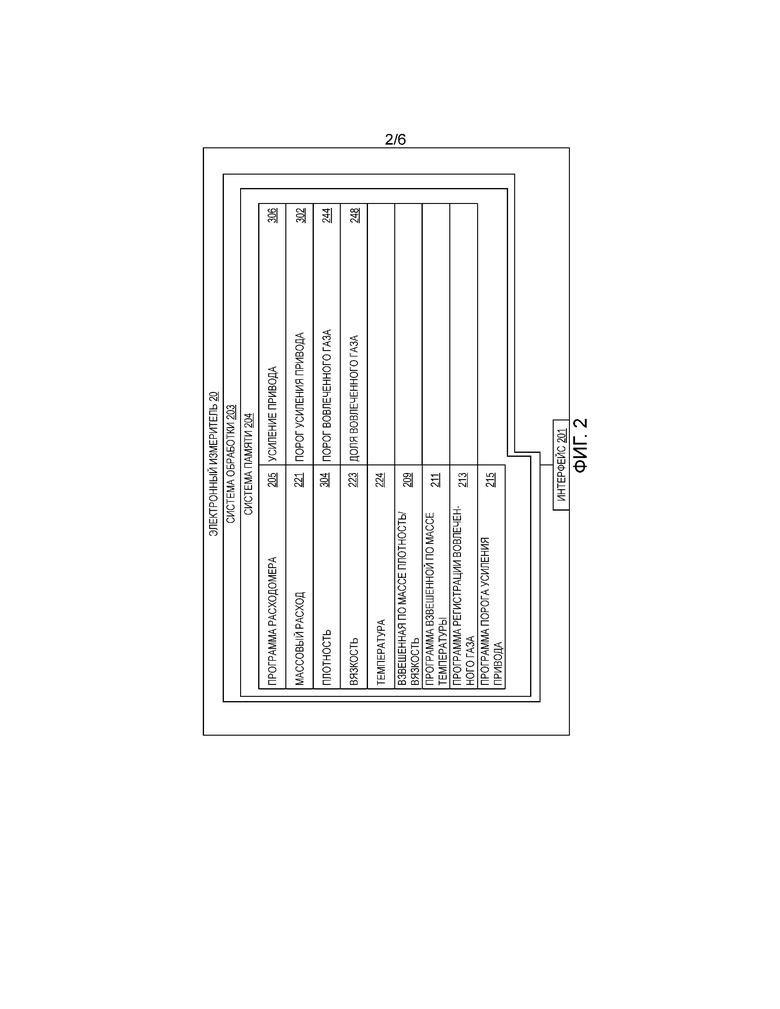
На Фиг.2 показана блок-схема электронного измерителя 20 расходомера 5 в соответствии с вариантом реализации. При работе, расходомер 5 предоставляет различные значения измерения, которые могут быть выведены, включая одно или несколько из измеренного или усредненного значения содержания воды, массового расхода, объемного расхода, массового и объемного расхода отдельного компонента, и полного расхода, включая, например, и объемный, и массовый расход.
Расходомер 5 создает колебательный отклик. Колебательный отклик принимается и обрабатывается электронным измерителем 20 для создания одного или нескольких значений измерения текучей среды. Значения могут быть проверены, зарегистрированы, просуммированы, и выведены.
Электронный измеритель 20 включает в себя интерфейс 201, систему 203 обработки, связанную с интерфейсом 201, и систему 204 памяти, связанную с системой 203 обработки. Хотя эти компоненты показаны как отдельные блоки, следует понимать, что электронный измеритель 20 может содержать различные комбинации интегрированных и/или дискретных компонентов.
Интерфейс 201 выполнен с возможностью связи со сборкой 10 датчика расходомера 5. Интерфейс 201 может быть выполнен с возможностью соединения с кабелями100 (см. Фиг.1), и может обмениваться сигналами с приводом 104 и тензометрическими датчиками 105 и 105'. Интерфейс 201 может быть дополнительно выполнен с возможностью связи по каналу 26 связи, например, с внешними устройствами.
Система 203 обработки может содержать любого вида систему обработки. Система 203 обработки выполнена с возможностью извлечения и выполнения сохраняемых программ для управления расходомером 5. Система 204 памяти может хранить программы, включая программу 205 расходомера, программу 209 взвешенной по массе плотности/вязкости, программу 211 взвешенной по массе температуры, программу 213 регистрации вовлеченного газа, и программу 215 определения порога усиления привода. Другие программы измерения/обработки также предполагаются и находятся в пределах объема притязаний описания и формулы. Система 204 памяти может хранить измерения, принятые значения, рабочие значения, и другую информацию. В некоторых вариантах реализации, система памяти хранит, по меньшей мере, одно - массовый расход ( ) 221, плотность (ρ) 304, вязкость (μ) 223, температуру (T) 224, усиление 306 привода, порог 302 усиления привода, порог 244 вовлеченного газа, и доля 248 вовлеченного газа.
) 221, плотность (ρ) 304, вязкость (μ) 223, температуру (T) 224, усиление 306 привода, порог 302 усиления привода, порог 244 вовлеченного газа, и доля 248 вовлеченного газа.
Программа 205 расходомера может производить и сохранять количественные параметры текучей среды и измерения расхода. Эти значения могут содержать по существу мгновенные значения измерения или могут содержать суммарные или накопленные значения. Например, программа 205 расходомера может создавать измерения массового расхода и сохранять их в памяти 221 массового расхода системной памяти204, например. Программа 205 расходомера может создавать измерения плотности и сохранять их в памяти 304 плотности, например. Массовый расход и значения плотности определяются из колебательного отклика, как ранее рассмотрено и как известно в данной области техники. Массовый расход и другие измерения могут содержать по существу мгновенное значение, могут содержать выборку, могут содержать усредненное по временному интервалу значение, или могут содержать накопленное значение по интервалу времени. Интервал времени может быть выбран для соответствия блоку времени, в течение которого регистрируются некоторые состояния текучей среды, например, только жидкое состояние текучей среды, или, альтернативно, состояние текучей среды, включающего в себя жидкости и вовлеченный газ. Кроме того, другой массовый расход и соответственные количественные параметры также предполагаются и находятся в пределах объема притязаний описания и формулы.
Способ для определения порога 302 усиления привода варьируется в зависимости от применения. В варианте реализации, свойства и расходы текучей среды предполагаются относительно постоянными во времени ("устойчивые применения"), и предполагается, что нет резких флуктуаций. Следует отметить, что для предоставленных здесь вариантов реализации термин усиление привода, в некоторых вариантах реализации, может относиться к току возбуждения, напряжению тензометрических датчиков, или любому сигналу, измеренному или выведенному, который указывает величину мощности, необходимую для приведения в движение расходомерных трубопроводов 103A, 103B с заданной амплитудой. В соответственных вариантах реализации, термин усиление привода может быть расширен для охвата любого показателя, используемого для регистрации многофазного потока, например, уровней шума, среднеквадратичного отклонения сигналов, измерений, связанных с демпфированием, и любых других средств известных в данной области техники для регистрации многофазного потока. Рабочий пример этого, без ограничения, естественно производящая нефтяная скважина, в которой расход задается подземным давлением скважины. Предполагается, что давление остается достаточно постоянным на коротких периодах времени (<1 дня, например). Искусственные лифтовые шахты, такие как управляемые электрическим скважинным насосом, также относятся к этому применению, поскольку расходы остаются достаточно постоянными. В результате достаточно постоянных условий оказывается необходимой соответственная чувствительность к малым увеличениям усиления привода и к сохранению корректирующего состояния большую часть времени. То есть, для применений, которые известны как имеющие постоянные расходы и плотности, часто желательно интерполировать данные для длинных промежутков времени, с целью получения точных измерений, выполняемых в периоды низкого содержания газа, таким образом, игнорируя большую часть ошибочных измерений, выполняемых между периодами с более высоким содержанием газа.
В этом варианте реализации предполагается, что объемный расход смеси (газ и жидкость) является постоянным, хотя газ присутствует. Поэтому, расход жидкости может быть вычислен на основании следующего уравнения, например, без ограничения:
 (1)
(1)
Где:
GVF - доля объема газа.
В условиях потока, когда газ отсутствует, объемный расход смеси равен объемному расходу жидкости. Однако, в одном варианте реализации, делается предположение, что объемный расход смеси не изменяется, когда газ присутствует.
В то время, когда усиление привода мало и стабильно, газ не присутствует в магистрали, и можно предполагать, что все измерения точны в пределах нормальных спецификаций расходомера. Много источников текучей среды имеют только неравномерный вовлеченный газ, и в течение часа, или дня, или в другой предварительно определенный период времени, вероятно, что существует интервал времени, когда имеется немного газа или газ отсутствует. В течение этого времени, усиление привода мало и стабильно, и расходу, плотности и любому другому измерению, выполняемому измерителем, можно доверять и выводить его пользователю или регистрировать для статистического анализа. Это может позволить точное определение расходов компонентов в этот период малого усиления привода, например, без ограничения.
Как отмечено выше, когда усиление привода расходомера 5 повышается выше определенного порога, тогда текучая среда в измерителе считается многофазным потоком, и предпринимается корректирующее действие для улучшения точности измеряемых значений. Таким образом, когда усиление привода оказывается выше порога, измеритель работает в корректирующем состоянии. Опорные значения (измеренные переменные, используемые из периода однофазного потока) для плотности, объемного расхода, и массового расхода от периодов малого усиления 306 привода (усиление 306 привода ниже порога 302 усиления привода), поэтому используются в течение корректирующего состояния для замены или улучшения точности измеряемых переменных. Поскольку расходы и плотность могут изменяться со временем, опорные значения должны периодически обновляться; однако для большинства периодов времени, программа 215 определения порога усиления привода может оставаться в корректирующем состоянии и интерполировать даже по малым количествам вовлеченного газа. Приемлемо оставаться в этом корректирующем состоянии в течение многих относительно длительных периодов времени, поскольку альтернатива заключается в допущении больших ошибок, связанных с вовлеченным газом в расходомере 5. Таким образом, более выгодно измерять точные значения, но только иногда, чем часто производить измерения, характеризующиеся большими ошибками. Если порог установлен слишком высоким, то измеряемые значения и опорные значения могут быть основанными на многофазных измерениях, и скорректированные значения для жидкости будут ошибочными.
Если порог усиления привода установлен слишком малым, то опорные значения никогда не могут быть определены в течение данного периода времени. Например, в применениях, где газ имеется все время/большую часть времени, так, что усиление привода никогда не падает ниже порога, то значение порога по умолчанию устанавливается заниженным. В варианте реализации, порог 302 усиления привода, таким образом, устанавливается таким, что опорные значения периодически определяются из периодов минимального усиления привода. Если минимальные усиления привода увеличиваются или уменьшаются со временем, то порог 302 усиления привода регулируется автоматически. В варианте реализации, значение порога 302 усиления привода определяется не на основании желания идентифицировать промежутки времени с газом и без газа, как в технике предшествующего уровня, а вместо этого порог 302 усиления привода выбирается специально для определения числа опорных значений, которые он создаст за данный период. Это число опорных значений и период времени могут быть заданы пользователем в варианте реализации, однако, это может также быть определено во время конструирования/тестирования расходомера 5. Например, для данного применения, может иметь смысл автоматическое определение порога 302 усиления привода, что позволит выполнить пять обновлений опорных значений в течение данного периода времени. Пять обновлений - это просто пример, и возможно больше или меньше обновлений в предварительно определенных временных рамках.
Эта концепция представляет собой отход от исторической идеи выбора порога 302 усиления привода как значения, выше которого программа 215 определения порога усиления привода предполагает, что газ был зарегистрирован. Расходомеры 5 имеют способность регистрировать даже малые количества вовлеченного газа в потоке жидкости посредством измерения мощности привода трубопровода, известного как диагностическое усиление 306 привода. Усиление 306 привода - это мера величины мощности привода, требуемой для поддержания колебаний расходомерных трубопроводов измерителя Кориолиса при постоянной амплитуде. Для измерения однофазного газа или жидкости, усиление 306 привода мало и устойчиво, поскольку относительно малая мощность требуется для колебаний структуры на ее собственной частоте. Однако, даже когда малые количества газа присутствуют в жидкости, или малые количества жидкости присутствуют в газе, мощность привода, требуемая для колебаний, значительно увеличивается. Это делает усиление 306 привода очень надежной регистрационной диагностикой наличия вовлеченного газа. Исторически, порог 302 усиления привода использовался просто как способ для идентификации периодов времени, когда газ присутствует. Это в основном использовалось как двойная индикация относительно наличия/отсутствия газа. Однако, в представленных вариантах реализации газ может присутствовать часто или всегда, таким образом, делая возможным осуществить наилучшие измерения, с наименьшим содержанием газа и с наименьшим усилением привода. Таким образом, порог 302 усиления привода автоматически определяется не просто на основании регистрации газа, а скорее при обнаружении периодов минимального содержания газа для отыскания лучших опорных значений, доступных для данного периода времени. Это уравновешивает потребность в точности и потребность в том, чтобы иногда обновлять значения для регистрации изменений технологического расхода и состава текучей среды.
Устойчивые Применения
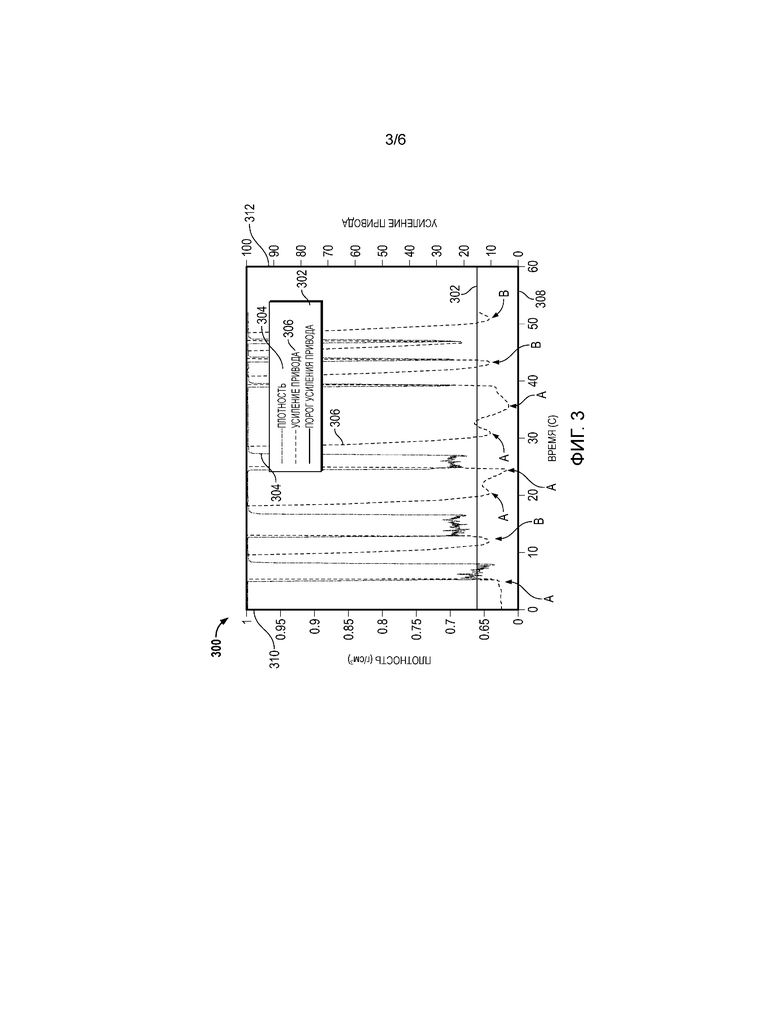
В отношении Фиг.3, для определения порога 302 усиления привода, контролируется предварительно определенный период времени сигнала усиления привода. Обновленный порог 302 усиления привода определяется на основании минимального требуемого порога, так, что усиление 306 привода падает ниже порога 302 усиления привода предварительно определенное число раз в течение предварительно определенного периода времени. На Фиг.3 показаны выборочные данные 300 от массового расходомера Кориолиса, представляющие плотность 304 и усиление 306 привода, взятые в течение некоторого времени. Ось X 308 отображает время, левая ось Y 310 отображает плотность 304, и правая ось Y 312 отображает усиление 306 привода. Во время выполнения регистрации данных, текучая среда была введена через расходомер 5, имеющая вовлеченный газ в различных временных точках и в различных объемах. Порог 302 усиления привода в 15,1% был определен для этого конкретного расходомера 5, который был основан на 50 секундном периоде порога усиления привода. Относительное местоположение пяти нижних периодов усиления привода, из которых был определен порог 302 усиления привода, помечено как точки "A".
В варианте реализации, имеется дополнительная опция требования падения усиления 306 привода ниже порога 302 усиления привода в течение предварительно определенного отрезка времени. Этот предварительно определенный отрезок времени представляет собой время, необходимое для того, чтобы усиление 306 привода стало ниже порога 302 усиления привода прежде, чем программа 215 определения порога усиления привода определит попадание в корректирующее состояние и получит новые опорные значения. Это защищает относительно мгновенных отклонений зашумленного сигнала усиления привода, который не точно отображает длительное падение при демпфировании вследствие меньшего количества газа в расходомерных трубопроводах. На Фиг.3, предварительно определенный отрезок времени был установлен до двух секунд, и число желаемых опорных значений установлено как пять. Имеется множество периодов малого усиления привода на графике (помечены как точки "B"), которые появляются ниже порога 302 усиления привода - однако, усиление 306 привода было не ниже пороговой линии в течение, по меньшей мере, двух секунд. Поэтому, эти точки игнорировались при определении порога 302 усиления привода.
Число опорных значений, желательных для предварительно определенного периода времени, определяется на основании применения и условий. Порог 302 усиления привода, который произвел бы желаемое число опорных значений для предварительно определенного периода времени, оценивается, и затем используется в течение последующего периода времени для определения опорных значений. Таким образом, в варианте реализации, новый порог определяется для конкретного периода времени на основании считываний из предыдущего периода времени. Поскольку технологические условия достаточно устойчивы в этих сценариях, предполагается, что порог, определенный из одного периода времени, будет соответственным и в течение следующего периода времени, когда он используется, таким образом, производя примерно то же самое число опорных значений. Однако, в альтернативном варианте реализации, программа 215 определения порога усиления привода основана на скользящем окне данных, а не на дискретных периодах времени. В этом случае, порог 302 усиления привода может непрерывно обновляться и может быть более соответственным для текущих условий.
Неустойчивые Применения
В других применениях, можно только предполагать, что плотность остается постоянной в течение периодов высокого усиления привода ("неустойчивые применения"). Вследствие этого, можно только предполагать, что измерения массового расхода точно измеряют массовый расход жидкости, когда имеется присутствующий газ. Это позволяет определить объемный расход жидкости из следующего уравнения, например, без ограничения:
 (2)
(2)
Для неустойчивых применений может оказаться так, что плотность жидкости также флуктуирует, возможно вследствие изменений содержания воды, например, без ограничения. Вследствие этого, порог 302 усиления привода устанавливается несколько выше, чем для устойчивых применений. Также, расходомер 5 не затрачивает так много времени в корректирующем состоянии, что отличается от вышеотмеченных устойчивых применений, где технологические условия являются достаточно постоянными, в идеале более консервативными, и остается в корректирующем состоянии чаще.
Следует отметить, что простое увеличение числа желаемых опорных значений не приведет к желаемому поведению измерения в реальном времени. Усиление 306 привода может быть малым и устойчивым большую часть времени в некоторых неустойчивых применениях, несмотря на флуктуации плотности, объемного расхода, и массового расхода. Следует также отметить, что хотя усиление привода мало, часто все же имеются очень малые флуктуации. Например, без ограничения, даже когда нет вовлеченного газа в технологической текучей среде, усиление привода не будет оставаться постоянным, например, 4%, но вместо этого будет беспорядочно флуктуировать между 3,9 и 4,1%. Эти флуктуации могут быть обусловлены шумами потока или колебаниями трубопровода. И снова - это просто пример в иллюстративных целях. Если используется описанная выше пороговая методология для устойчивых применений, порог может быть установлен относительно низким (например, 4%, в отношении вышеприведенного примера), и все же производятся многие опорные значения. Для неустойчивых применений, когда усиление привода мало, не является преимущественным поддерживать плотность, поскольку плотность может изменяться, и важно отметить и измерить это изменение для поддержания точных считываний. И опять, это не большая проблема для устойчивых применений, поскольку плотность не изменяется быстро.
В варианте реализации для неустойчивых применений, для предотвращения нежелательного поддержания плотности или других опорных значений в таких случаях, как описано выше, к автоматически определенному порогу 302 усиления привода может быть добавлена константа. Обращаясь снова к вышеупомянутому примеру, если порог был автоматически определен как 4%, учитывая пять опорных значений в течение данного периода времени, то он может быть увеличен на величину от 5% до 9%, например, без ограничения. Это позволяет выводить измеренную плотность большую часть времени, с исключениями для периодов с достаточным количеством вовлеченного газа для значительного увеличения усиления привода - много больше, чем на 5% выше, чем для периода без газа, например.
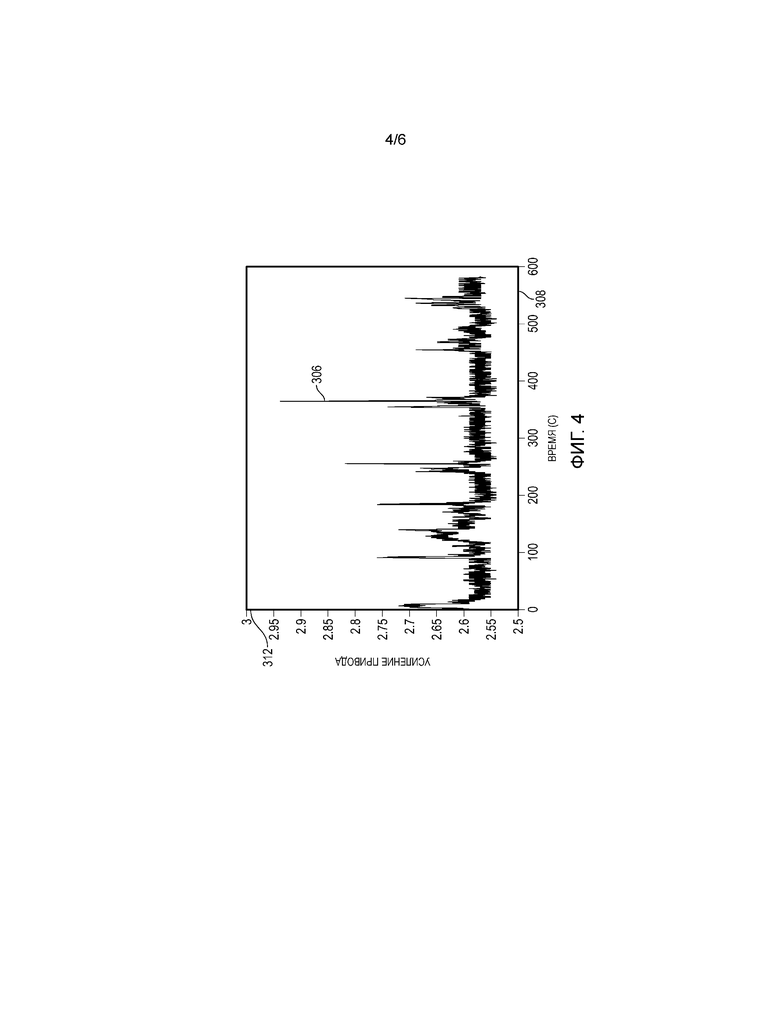
Для иллюстрации этой точки, Фиг.4 - это 600 секундный график, иллюстрирующий зарегистрированное усиление привода расходомера 5, принимающего поток жидкого нефтяного технологического материала от сепаратора газ-жидкость. Как можно видеть, усиление привода относительно мало (<3%) для продолжительности регистрации. Когда усиление привода мало, то имеется высокая степень достоверности, что в текучей среде нет газа. Несмотря на малость, все же имеются малые флуктуации усиления привода между 2,5 и 3%, что, вероятно, является артефактом, обусловленным шумом потока в системе, создаваемым включением и выключением клапана сепаратора. Программа 215 определения порога усиления привода определяет, что порог 302 усиления привода составляет 2,56% за 500 секундный период. Это просто пример тестирования расходомера, и другие текучие среды, применения, пороги, периоды времени, и т.д. также возможны. Это только малая выборка данных, и во многих применениях, пороговый период может быть установлен для определения порога 302 усиления привода за период, охватывающий от нескольких минут до нескольких часов, или даже длиннее, в зависимости от эксплуатационных условий. При работе программы 215 определения порога усиления привода, для этого примера, опция требования падения усиления 306 привода ниже порога 302 усиления привода в течение предварительно определенного отрезка времени была установлена как две секунды, и число желаемых опорных значений в течение этого периода было установлена пять. Иначе говоря, в течение первых 500 секунд данных, усиление привода падает ниже 2,56%, для минимума в 2 секунды, 5 раз, создавая 5 опорных значений.
Этот пример дополнительно иллюстрирует, что наибольшую часть времени усиление привода составляет выше 2,56%, что означает, что плотность и/или другие опорные значения поддерживается большую часть времени. Это было бы очень хорошо для устойчивых применений, поскольку не предполагается изменение технологических условий в масштабе малых времен, однако для неустойчивых применений, плотность может быть объектом изменения в этот период времени и, таким образом, чрезмерное поддержание значений может быть неоптимальным. Простым добавлением константы к порогу, например, 5%, без ограничения, программа 215 определения порога усиления привода никогда не введет корректирующее состояние, и любые изменения плотности будут измерены. В этом случае, если газовая пробка войдет в расходомер 5, усиление привода резко подскочит, много больше 8%, и плотность будет поддержана. Это приводит к объединенному преимуществу автоматического определения порога 302 усиления привода, обеспечивая все преимущества по времени и трудозатратам, упомянутым выше, по существу без изменения поведения измерителя при обычном применении.
Расширенное Усиление привода
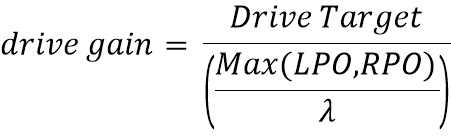
В типичных измерителях Кориолиса, величина мощности, предоставляемой на привод, часто ограничивается требованиями взрывоопасной зоны. Объем газа, необходимый для повышения усиления привода до 100%, таким образом, относительно мал, обычно меньше, чем 1% GVF. Поэтому возможно, что в периоды малого содержания газа имеется достаточно газа, чтобы вызвать усиление 306 привода до 100%, таким образом, эффективно завершая применимость диагностики усиления привода, нацеленную на различение изменения количества газа. В случае 100%-ого усиления 306 привода, порог 302 усиления привода может быть установлен как 100%, и не будет никакого варианта различить периоды с малым и большим содержанием газа. Это только может позволить оператору знать, что имеется достаточно присутствующего газа, чтобы привести к 100%-ому усилению привода, что не особенно полезно. Для решения этой проблемы, вариант реализации предоставляет диагностику расширенного усиления привода. Расширенное усиление привода - это то, чем было бы усиление привода, если бы больше мощности было доступно, со 100%-ым усилением привода все же равным максимальной разрешенной мощности. Например, 200%-ое усиление привода указывает, что в два раза больше доступной мощности необходимо для управления измерителем при заданной амплитуде. Таким образом, расширенное усиление привода может быть выше 100%. Расширенное усиление привода вычисляется, используя следующее уравнение:
 (3)
(3)
Где:
Drive Target - заданное значение амплитуды трубопровода в мВ/Гц;
Max(LPO, RPO) - максимум тензометрического напряжения между левым и правым тензометрическими датчиками
λ - частота колебаний расходомерных трубопроводов.
Количество  отображает истинную амплитуду трубопровода. Как только усиление привода достигает 100%, вследствие недостаточной мощности, истинная амплитуда трубопровода падает ниже установленного значения амплитуды трубопровода. Как только усиление привода достигает 100%, расширенное усиление привода продолжает увеличиваться, поскольку истинная амплитуда трубопровода продолжает падать ниже установленного значения амплитуды трубопровода.
отображает истинную амплитуду трубопровода. Как только усиление привода достигает 100%, вследствие недостаточной мощности, истинная амплитуда трубопровода падает ниже установленного значения амплитуды трубопровода. Как только усиление привода достигает 100%, расширенное усиление привода продолжает увеличиваться, поскольку истинная амплитуда трубопровода продолжает падать ниже установленного значения амплитуды трубопровода.
На Фиг.5 показана ситуация, где имеется достаточно вовлеченного газа в технологической текучей среде, который фактически никогда не понижает усиление привода ниже 100%. Это сценарий, типичный в устьевых применениях, но может присутствовать в других применениях также. Однако, должно быть ясно, что фиксируя плотность 304, все же имеются периоды высокого и низкого газового объема, соответствуя тому, когда плотность 304 мала и велика, соответственно. Хотя газ в расходомере 5 имеется всегда в этой ситуации, все же выгодно создать опорные значения из периодов, которые характеризуются более низкими уровнями вовлеченного газа, поскольку эти опорные значения могут быть использованы для улучшения измерений, накопленных в течение периодов с более высокими газовыми концентрациями. Это скорректированное измерение является все же ошибочным, но это есть существенное усовершенствование точности относительно измерений стандартным расходомером 5 техники предшествующего уровня. Используя стандартное усиление 306 привода, порог 302 усиления привода может быть установлен как 100%, и может быть невозможно различить периоды с высоким и низким содержанием газа. Расширенное усиление привода позволяет различать эти периоды.
Демпфирование Порога Усиления привода
Как было отмечено, программа 215 определения порога усиления привода автоматически определяет порог 302 усиления привода для предоставления некоторого числа обновленных опорных значений в течение данного периода времени. Однако, в некоторых применениях, GVF увеличивается и уменьшается в несогласованных интервалах времени. Как пример такого случая, быстрые колебания в газовой фракции могут произойти вследствие частичного разделения, поскольку газовая/жидкая смесь приходит из буровой скважины, что приводит к газовым пробкам в секундном масштабе времени. Однако, в других применениях, для газовой фракции могут быть тенденции к большим масштабам времени. В варианте реализации, порог 302 усиления привода регулируется для приспособления увеличения и уменьшения GVF в несогласованных интервалах времени. В примерном варианте реализации, источник текучей среды, имеющий частые гидродинамические закупорки в течение гипотетического первого периода времени, может заставить способ "делать лучшее из возможного" и находить предварительно определенное число обновленных опорных значений. Если гипотетический последующий период времени почти не содержит газа, порог 302 усиления привода, определенный из предыдущего периода (с большим содержанием газа), может обнаружить и зарегистрировать увеличенное число опорных значений, поскольку в системе имеется меньше газа. Это так, поскольку меньше полного газа приводит к падениям усиления 306 привода ниже предварительно определенного порога на более частом основании. Порог из этого периода малого содержания газа будет тогда установлен ниже для следующего периода. Третий гипотетический период времени может произойти, как имеющий относительно большой объем газа. Вследствие низкого порога от предыдущего периода времени, усиление 306 привода может никогда не понизиться ниже порога 302 усиления привода, когда опорные значения не были зарегистрированы в этот период времени. Поскольку опорные значения, определенные в предыдущем периоде времени, были определены от периодов с более низким содержанием газа, считывания в этот период времени будут более точными. Если в течение четвертого гипотетического периода времени, относительно высокое содержание газа останется тем же самым, что и в течение третьего гипотетического периода времени, то предварительно определенное число опорных значений будет произведено, поскольку порог 302 усиления привода был определен из периода с подобным содержанием газа. Эти новые опорные значения заменяют предшествующие опорные значения.
Успех или неудача при измерении, использующем этот способ, зависят в значительной степени от возможности эксплуатировать более точные данные, выбрасывая менее точные данные. В варианте реализации, предпочтение следует отдавать недавним данным относительно старых данных, для уверенности в том, что фактические изменения состояний технологической текучей среды не пропущены.
В варианте реализации, для преодоления вышеописанного неоптимального поведения, и для управления компромиссом между точностью и новизной, односторонний демпфирующий фильтр добавляется к программе 215 определения порога усиления привода. Односторонний - имеется в виду, что демпфирующий фильтр демпфирует значения порога усиления привода, когда они увеличиваются, но немедленно снижает их к новым более низким значениям. Этот вариант реализации имеет несколько существенных выгод: (1) более точные опорные значения сохраняются дольше, (2) опорные значения обновляются чаще, когда усиление привода мало, и (3) опорные значения, определенные в течение плохих периодов, быстро уничтожаются после того, как даже единственное новое хорошее значение найдено. Таким образом, демпфирующий фильтр делает программу 215 определения порога усиления привода более приспосабливаемой к изменяющимся условиям.
Снова обращаясь к вышеупомянутому гипотетическому примерному сценарию, было бы выгодно продолжить использовать опорные значения высокой точности от периода 2 и дольше, чем только в период 3. Чтобы сделать это, порог 302 усиления привода от периода 4 может быть основан на среднем или на минимуме предварительно определенного числа предыдущих порогов 302 усиления привода. Это фактически добавляет демпфирование к текущему порогу 302 усиления привода, и предотвращает его от быстрого увеличения вследствие более высокого содержания газа. Это гарантирует, что используются только те новые опорные значения, которые имеют более высокое относительное качество, поскольку в использовании уже есть относительно недавние и точные значения. Даже в случае, где нет новых хороших значений какой-то период времени, это оказывается приемлемым, поскольку в конечном счете демпфированный порог 302 усиления привода повысится достаточно, чтобы позволить использование более нового, хотя и менее точного, значения.
Для демпфирования увеличения порога 302 усиления привода, порог 302 усиления привода может быть основанным на минимуме из двух количеств: Первое, среднее или минимум текущего и некоторого предварительно определенного числа предшествующих порогов; и второе, порог 302 усиления привода в использовании. Число предшествующих порогов для использования, и действительно ли использовать среднее значение или минимум, влияет на то, как долго его можно использовать до создания нового порога. Например, без ограничения, если используется минимум предыдущих порогов, то текущий порог 302 усиления привода может оставаться низким для нескольких периодов времени и может требоваться время для создаваемого нового опорного значения. Если среднее значение предшествующих порогов 302 усиления привода использовать для сравнения, то с каждым периодом времени активный порог 302 усиления привода увеличивается, и число новых опорных значений также увеличивается.
На Фиг.6 показана таблица, иллюстрирующая то, как демпфирование увеличения порога 302 усиления привода уменьшает число опорных значений, определенных когда порог 302 усиления привода увеличивается, тем самым, давая тенденцию программе 215 определения порога усиления привода использовать более точные данные для более длинных периодов времени. Эти значения являются гипотетическими, и служат только иллюстративным целям. Как показано, используемый способ минимального демпфирования основан на текущем плюс три предшествующих порога. Если бы использовался способ среднего демпфирования, то демпфированный порог 302 усиления привода медленно увеличивался бы когда истинный порог 302 усиления привода увеличивался быстро. Минимальный способ вынуждает порог 302 усиления привода оставаться почти постоянным когда истинный порог увеличивается. Число опорных значений увеличивается в течение периода 4 времени. Это так потому, что порог, используемый в течение периода 4 (созданный в течение периода времени 3) выше, чем порог, созданный в течение периода 4. Поскольку низкий порог 302 усиления привода указывает на период с низким содержанием газа, это приводит к большему числу опорных значений. Число опорных значений уменьшается в течение периода 6 времени. Это так потому, что порог, используемый в течение периода 6 (созданный в течение периода 5), меньше чем порог, созданный в течение периода 6. Не только число опорных значений уменьшается, но также следует отметить, что и порог 302 усиления привода еще не повысился, что означает, что полученные опорные значения имеют более высокое качество. В течение периода 8, используя стандартный порог, находятся пять новых опорных значений. Это так потому, что порог 302 усиления привода, созданный в течение периода 8, тот же самый, что и порог, используемый в течение периода 8, что указывает на подобное содержание газа между этими двумя периодами. С другой стороны, демпфированный порог, используемый в течение периода 8, намного ниже, приводя к нулевым новым опорным значениям. Это дает вклад в точность, поскольку любые опорные значения, созданные в течение этого периода, вероятно будут ошибочными вследствие увеличенного содержания газа, так, что выгодно продолжить использование опорных значений от периода с низкими уровнями вовлеченного газа.
Настоящее описание показывает конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант изобретения. Например, нефтяные и газовые скважины используются в иллюстративных целях, но описанные здесь варианты реализации предполагают использование в любом применении потока текучей среды. С целью пояснения изобретательных принципов, некоторые обычные объекты были упрощены или исключены. Специалисты в данной области техники увидят вариации этих примеров, которые находятся в пределах объема притязаний изобретения.
Подробные описания вышеупомянутых вариантов реализации не являются исчерпывающими описаниями всех вариантов реализации, рассматриваемых изобретателями как находящиеся в пределах объема притязаний изобретения. Действительно, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов реализации могут быть по-разному объединены или устранены для создания дополнительных вариантов реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний и принципов изобретения. Специалистам в данной области техники также будет очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично для создания дополнительных вариантов реализации в пределах объема притязаний и принципов изобретения.
Таким образом, хотя конкретные варианты реализации и соответственные примеры изобретения описаны здесь в иллюстративных целях, различные эквивалентные модификации возможны в пределах объема притязаний изобретения, как увидят специалисты в данной области техники. Предоставленные здесь принципы могут быть применены к другим вариантам реализации, отличным от описанных выше и показанных на сопровождающих чертежах. Соответственно, объем притязаний изобретения определяется нижеследующей формулой.
Настоящее изобретение относится к устройствам расходомера Кориолиса и способам, и в частности к устройствам расходомера Кориолиса и способам для определения операционных порогов для потока многофазной текучей среды. Электронный измеритель (20) для расходомера (5), выполненного с возможностью приема технологической текучей среды, включает в себя интерфейс (201), выполненный с возможностью связи со сборкой расходомера (5) и приема колебательного отклика. Электронный измеритель (20) содержит программу (215) определения порога усиления привода, выполненную с возможностью определения первого предварительно определенного порога (302) усиления привода, мониторинга сигнала усиления привода в течение предварительно определенного периода времени и определения нижних точек в сигнале усиления привода в течение предварительно определенного периода времени. Второй порог усиления привода определяется на основании достижения предварительно определенного числа случаев появления нижних точек сигнала усиления привода. Технический результат - уменьшение проблем, связанных с установкой соответствующего порога усиления привода для работы с многофазным потоком. Данные варианты реализации предоставляют способы, используемые для определения идеального порога. 2 н. и 20 з.п. ф-лы, 6 ил.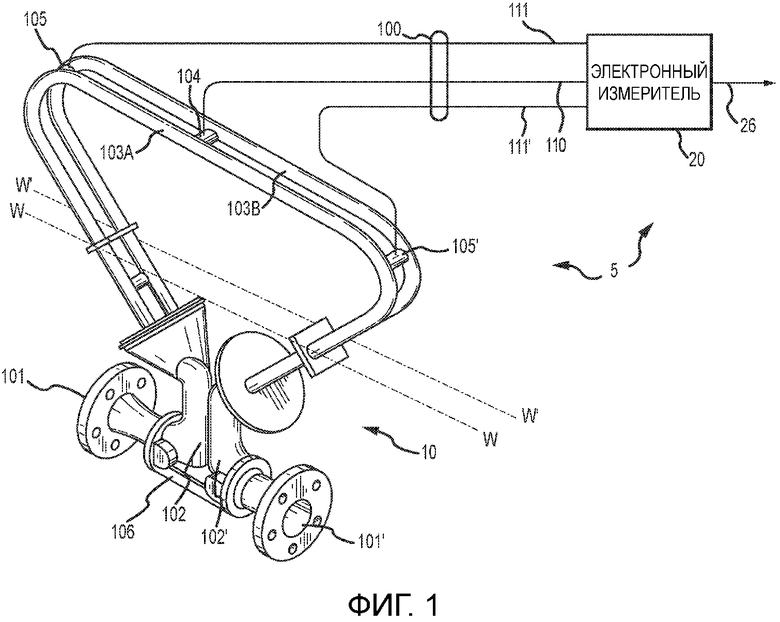
1. Способ определения порога усиления привода для вибрационного расходомера, содержащий:
размещение технологической текучей среды в вибрационном расходомере;
определение первого предварительно определенного порога усиления привода;
мониторинг сигнала усиления привода в течение предварительно определенного периода времени;
определение нижних точек в сигнале усиления привода в течение предварительно определенного периода времени; и
определение второго порога усиления привода на основании достижения предварительно определенного числа случаев нижних точек сигнала усиления привода.
2. Способ по п.1, содержащий этап замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода.
3. Способ по п.1, содержащий этап регистрации, по меньшей мере, одного опорного значения в течение периодов, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода.
4. Способ по п.1, содержащий этап усреднения значений сигналов усиления привода, регистрируемых в течение каждого случая, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода.
5. Способ по п.1, содержащий этап регистрации каждого случая, когда сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода, только если сигнал усиления привода падает ниже первого предварительно определенного порога усиления привода для предварительно определенного периода времени.
6. Способ по п.3, причем, по меньшей мере, одно опорное значение содержит, по меньшей мере, одно из расхода и плотности технологической текучей среды.
7. Способ по п.1, причем предварительно определенный период времени для мониторинга сигнала усиления привода содержит скользящее окно.
8. Способ по п.1, содержащий этап добавления постоянного значения, по меньшей мере, к одному из первого предварительно определенного порога усиления привода и второго предварительно определенного порога усиления привода.
9. Способ по п.1, содержащий этап: вычисления сигнала усиления привода, причем
 , где:
, где:
Drive Target - заданное значение амплитуды трубопровода;
Max(LPO, RPO) - максимум тензометрического напряжения между левым и правым тензометрическими датчиками; и
λ - частота колебаний расходомерных трубопроводов.
10. Способ по п.2, причем этап замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так что первый предварительно определенный порог усиления привода заменяется средним значением для второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
11. Способ по п.2, причем этап замены первого предварительно определенного порога усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так что первый предварительно определенный порог усиления привода заменяется минимумом из второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
12. Электронный измеритель (20) для расходомера (5), выполненный с возможностью приема технологической текучей среды, причем электронный измеритель (20) содержит интерфейс (201), выполненный с возможностью связи со сборкой (10) датчика расходомера (5) и приема колебательного отклика, и систему обработки (203), связанную с интерфейсом (201), содержащую:
программу (215) определения порога усиления привода, выполненную с возможностью:
определения первого предварительно определенного порога (302) усиления привода;
мониторинга сигнала усиления привода в течение предварительно определенного периода времени;
определения нижних точек в сигнале усиления привода в течение предварительно определенного периода времени; и
определения второго порога усиления привода на основании достижения предварительно определенного числа случаев нижних точек сигнала усиления привода.
13. Электронный измеритель (20) по п.12, причем программа (215) определения порога усиления привода выполнена с возможностью замены первого предварительно определенного порога (302) усиления привода вторым предварительно определенным порогом усиления привода.
14. Электронный измеритель (20) по п.12, причем программа (215) определения порога усиления привода выполнена с возможностью регистрации, по меньшей мере, одного опорного значения в течение периодов, когда сигнал усиления привода падает ниже первого предварительно определенного порога (302) усиления привода.
15. Электронный измеритель (20) по п.12, причем программа (215) определения порога усиления привода выполнена с возможностью усреднения значений сигналов усиления привода, зарегистрированных в течение каждого случая, когда сигнал усиления привода падает ниже первого предварительно определенного порога (302) усиления привода.
16. Электронный измеритель (20) по п.12, причем программа (215) определения порога усиления привода выполнена с возможностью определения нижних точек в сигнале усиления привода в течение предварительно определенного времени, только если сигнал усиления привода падает ниже первого предварительно определенного порога (302) усиления привода для предварительно определенного периода времени.
17. Электронный измеритель (20) по п.14, причем, по меньшей мере, одно опорное значение содержит, по меньшей мере, одно из расхода и плотности технологической текучей среды.
18. Электронный измеритель (20) по п.12, причем предварительно определенный период времени для мониторинга сигнала усиления привода содержит скользящее окно.
19. Электронный измеритель (20) по п.12, причем программа (215) определения порога усиления привода выполнена с возможностью добавления постоянного значения, по меньшей мере, к одному из первого предварительно определенного порога (302) усиления привода и второго предварительно определенного порога усиления привода.
20. Электронный измеритель (20) по п.12, причем программа (215) определения порога усиления привода выполнена с возможностью вычисления сигнала усиления привода, причем
, где:
Drive Target - заданное значение амплитуды трубопровода;
Max(LPO, RPO) - максимум тензометрического напряжения между левым и правым тензометрическими датчиками (105, 105'); и
λ - частота колебаний расходомерных трубопроводов (103A, 103B).
21. Электронный измеритель (20) по п.13, причем замена первого предварительно определенного порога (302) усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так что первый предварительно определенный порог (302) усиления привода заменяется средним значением для второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
22. Электронный измеритель (20) по п.13, причем замена первого предварительно определенного порога (302) усиления привода вторым предварительно определенным порогом усиления привода содержит демпфирование, так что первый предварительно определенный порог (302) усиления привода заменяется минимумом из второго предварительно определенного порога усиления привода и предварительно определенного числа предварительно зарегистрированных порогов усиления привода.
| WO 2011008307 A1, 20.01.2011 | |||
| РЕШЕТНЫЙ СТАН ОЧИСТКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2004 |
|
RU2275787C1 |
| EP 1845346 A2, 17.10.2007 | |||
| Вставка в рафинадные формы | 1929 |
|
SU19175A1 |

