ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству и способу для генерирования цифровых последовательных частотных выходных сигналов, в частности для генерирования цифровых последовательных частотных выходных сигналов для индикации расхода в расходомере Кориолиса (кориолисовом расходомере).
ПОСТАНОВКА ЗАДАЧИ
В прошлые годы, в чисто механических устройствах, частотные выходные сигналы создавались с помощью вращающихся основных колес, которые действовали на переключатель при каждом повороте. Такого типа получение выходного сигнала стало общепринятым и теперь широко востребовано в различных промышленных применениях.
Частотный выходной сигнал (FO) - это цифровой выходной сигнал от устройства, которое производит прерывание однопроводной линии для получения частотного сигнала. В технологии измерения расхода, частота обычно оказывается пропорциональной желаемой переменной, такой как массовый расход. Методики измерения расхода подробно описаны для массовых расходомеров Кориолиса.
Массовые расходомеры Кориолиса измеряют массовый расход и другую информацию относительно материалов, текущих через магистральный трубопровод, как раскрыто в Патенте США No.4,491,025 и Re. 31,450. Эти расходомеры обычно содержат участок электронной схемы расходомера и участок датчика расходомера. Датчики расходомера имеют один или несколько расходомерных трубопроводов прямой или изогнутой конфигурации. Каждая конфигурация расходомерного трубопровода имеет набор собственных колебательных мод, которые могут быть простыми изгибными модами, крутильными, радиальными или модами смешанного типа. В каждом расходомерном трубопроводе возбуждаются резонансные колебания на одной из этих собственных колебательных мод. Собственные колебательные моды колеблющейся и заполненной материалом системы задаются, отчасти, общей массой расходомерных трубопроводов и материала в пределах расходомерных трубопроводов. Когда материал не течет через датчик расходомера Кориолиса, все точки по расходомерным трубопроводам колеблются по существу с идентичной фазой. Когда материал течет через расходомерный трубопровод, ускорения Кориолиса приводят к тому, что точки вдоль расходомерных трубопроводов приобретают различную фазу. Фаза на впускной стороне датчика расходомера отстает от привода, тогда как фаза на выпускной стороне датчика расходомера опережает привод.
Датчики расходомера Кориолиса обычно включают в себя два тензометрических датчика для получения синусоидальных сигналов, соответствующих перемещению расходомерных трубопроводов в различных точках вдоль расходомерных трубопроводов. Разность фаз синусоидальных сигналов, принимаемых от тензометрических датчиков, вычисляется электронной схемой расходомера. Разность фаз между тензометрическими сигналами пропорциональна массовому расходу материала, текущего через датчик расходомера. Пример расходомера Кориолиса показан на Фиг.1.
Электронная схема расходомера принимает тензометрические сигналы от тензометрических датчиков. Электронная схема расходомера обрабатывает тензометрические сигналы для вычисления массового расхода, плотности или другого свойства материала, проходящего через датчик расходомера.
Микроконтроллеры, которые реализуются на интегральной схеме со многими сложными внешними устройствами, обычно используются во всех расходомерах. Широко доступные микроконтроллеры являются универсальными и, поэтому, имеют малую стоимость и не проектируются специально для расходомеров. Пример микроконтроллера показан на Фиг.2.
Для измерения мгновенного расхода, важен малый "джиттер" (дрожание фазы). Дрожание фазы задается точностью периода любого данного импульса. Например, если бы частота следования импульсов с нечетным номером была 99,9 Гц и частота четно пронумерованных импульсов - 100,1 Гц, то средняя частота была бы 100 Гц, но выходной сигнал при этом будет иметь дрожание 0,1/100, или 0,1%.
Для измерения общего интегрального расхода важна высокая точность (в отношении разрешающей способности). Например, если положить 1 импульс на 1 грамм, то если создано 998 импульсов, но устройством были измерены 1000 грамм, то выходной сигнал характеризуется точностью 998/1000, или 0,2%.
Относительно других аспектов частотных выходных сигналов, имеется класс двойных частотных выходных сигналов (обычно называемых квадратурными сигналами), когда одни частотные выходные сигналы опережают другие на 90 градусов по фазе для положительного расхода или отстают на 90 градусов по фазе для отрицательного расхода. Другой аспект - это требования режима с не 50%-м коэффициентом заполнения. Частотные выходные сигналы должны функционировать в пределах широкого диапазона, обычно между 0,001 Гц и 10000 Гц; хотя иногда необходимы и более высокие и более низкие частоты.
Как отмечено выше, один вариант создания частотного выходного сигнала - это вариант со схемами таймера из "универсальных" цифровых аппаратных средств, которых имеется множество типов, и обычно они доступны на микроконтроллерах. В этом подходе, таймер аппаратных средств (обычно с делением на n и возможностью прерывания) запрограммирован для вывода определенной частоты за определенное время. Однако этот подход имеет несколько недостатков. Поскольку образующаяся частота следует из алгоритма деления на n, значительное дрожание фазы возникает даже с высокочастотными входными тактовыми сигналами. Например, при частоте входного тактового сигнала 10 МГц, и частоте желаемого выходного сигнала - 9999 Гц, таймер должен чередоваться между 10000 Гц (делением на 1000) и 9990,01 Гц (делением на 1001). Кроме того, также перспективно создать алгоритм, который может поддерживать точное отслеживание числа выводимых импульсов, поскольку фазовая синхронизация выходного сигнала таймера аппаратных средств не совпадает со временами обновления счетчика таймера. Третий недостаток - это то, что универсальные таймеры - максимум 32-разрядные; предоставляя приблизительно пять декад диапазона, где необходимо восемь декад. Соответственно, должны быть введены различные входные тактовые сигналы и пороги пересечения; и с этим привносится нарушение непрерывности, увеличенное фазовое дрожание ниже порога, и добавленная сложность поддержания точности временного положения импульса. Наконец, в зависимости от индивидуальных признаков "универсального" таймера, может оказаться очень затруднительным осуществление "других аспектов" частотных выходных сигналов, например квадратуры, длительности импульса, и т.д.
Менее общий вариант создания частотного выходного сигнала - это вариант создания с помощью "умножителя частоты". Это аппаратное средство обычно не доступно в микроконтроллерах, но может быть встроено в ASIC (Прикладная Специализированная Интегральная схема), FPGA (Программируемая Вентильная матрица) или другую заказную микросхему. Умножитель частоты преодолевает некоторые из недостатков способа с "универсальным" таймером, включая простоту охвата необходимого диапазона (так, чтобы никакие пересечения не вводились), и простоту поддержания временной точности импульса (поскольку фазовая синхронизация времени обновления всегда соответствует выходному сигналу). Кроме того, поскольку он осуществляется с заказными аппаратными средствами, "другие аспекты" частотных выходных сигналов, такие как квадратура и длительность импульса, легко достижимы. Вместе с тем, умножитель частоты требует внешних аппаратных средств и недостаточно оптимален (и не вполне определен) при сохранении малого дрожания фазы.
В дополнение к умножителю частоты, несколько других вариантов для создания частотного выходного сигнала могут быть предложены и осуществлены на заказных аппаратных средствах (например, на ASIC, FPGA, и т.д.). Однако все такие опции совместно имеют тот же самый основной недостаток схемы умножителя частоты вследствие наличия дополнительных компонентов, уменьшенной надежности и увеличенной стоимости.
Наконец, частотный выходной сигнал может быть создан с использованием аналоговой электроники. Это было общим предпочтением в период перехода между чисто механическими и цифровыми электронными устройствами. Пример аналоговой схемы - это управляемый напряжением генератор, который преобразовывает напряжение в частоту. Вследствие аналоговой природы, преобразование осуществляется не точно на 100% (например 1 В, может быть предназначен для преобразования в 1000 Гц, но это может быть и 999,9 Гц или 1000,1 Гц из-за допусков аналоговых компонентов). В аналоговой электронике, хотя частотный выходной сигнал имеет почти нулевое дрожание фазы, выходной сигнал также имеет плохую точность счета импульсов. Кроме того, хотя цифровая обратная связь может быть интегрирована в аналоговую электронику для компенсации точности счета импульсов, это приводит к запаздыванию и уменьшает абсолютную точность измерения частоты.
Поэтому, в данной области техники имеется потребность в устройстве микроконтроллера и в способе для преодоления вышеупомянутых проблем, предоставляя цифровой последовательный частотный выходной сигнал, который: обеспечивает учет дрожания фазы при данном входном тактовом сигнале, точность отсчета импульсов, абсолютную точность, имеет возможность для осуществления "других аспектов", включая квадратуру и длительность импульса, и не требует никаких специализированных внешних аппаратных средств.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение преодолевает выделенные выше проблемы, и продвигает данную область техники, предоставляя теоретически самое низкое дрожание фазы для данного входного тактового сигнала, наибольшую возможную точность счета импульсов, наибольшую возможную абсолютную точность, легко осуществляемые "другие аспекты" (квадратура, длительность импульса, и т.д.) и не требует никаких специализированных внешних аппаратных средств.
АСПЕКТЫ ИЗОБРЕТЕНИЯ
В одном аспекте изобретения, способ для создания частотного выходного сигнала на микроконтроллере, содержащий: инициализацию входного тактового сигнала, имеющего предварительно заданный период; вычисление параметра на основании предварительно заданного периода; вычисление желаемой частоты на основании вычисленного параметра и предварительно заданного масштабирования расход-частота; вычисление множества дробных импульсов, причем каждый дробный импульс из множества дробных импульсов вычисляется на основании желаемой частоты, предварительно заданного периода входного тактового сигнала, и значения предыдущего дробного импульса, и вывод желаемой частоты, переключая выходное состояние, когда вычисленный дробный импульс больше чем или равен половине периода выходного импульса.
Предпочтительно то, что если предыдущий дробный импульс - это начальный дробный импульс, значение предыдущего дробного импульса устанавливается на нуль.
Предпочтительно то, что период выходного импульса вычисляется на основании предварительно заданного периода входного тактового сигнала, вычисленного параметра, и предварительно заданного масштабирования расход-частота.
Предпочтительно то, что электронная схема измерителя выполнена с возможностью измерения мгновенного расхода.
Предпочтительно то, что электронная схема измерителя выполнена с возможностью измерения общего интегрального расхода на основании числа переключаемых выходных состояний и предварительно заданного масштабирования расход-частота.
Предпочтительно то, что параметр включает в себя расход.
В одном объекте изобретения, вибрационный расходомер (5) содержит: сборку (10) расходомера, включающую в себя один или несколько расходомерных трубопроводов (103A, 103B) и первый и второй тензометрические датчики (105, 105'); привод (104), выполненный с возможностью возбуждения колебаний одного или нескольких расходомерных трубопроводов (103A, 103B); и электронную схему (20) измерителя, связанную с первым и вторым тензометрическими датчиками (105, 105') и связанную с приводом (104), причем электронная схема (20) измерителя генерирует частотный выходной сигнал благодаря своей конфигурации для: инициализации входного тактового сигнала, имеющего предварительно заданный период; вычисления параметра на основании предварительно заданного периода; вычисления желаемой частоты на основании вычисленного параметра и заданном масштабировании расход-частота; вычисления множества дробных импульсов, причем каждый дробный импульс из множества дробных импульсов вычисляется на основании желаемой частоты, предварительно заданного периода входного тактового сигнала, и значения предыдущего дробного импульса, и выводит сигнал желаемой частоты, переключая выходное состояние, когда вычисленный дробный импульс больше чем или равен половине периода выходного импульса.
Предпочтительно то, что если предыдущий дробный импульс - это начальный дробный импульс, значение предыдущего дробного импульса устанавливается на нуль.
Предпочтительно то, что период выходного импульса вычисляется на основании предварительно заданного периода входного тактового сигнала, вычисленного параметра, и предварительно заданного масштабирования расход-частота.
Предпочтительно то, что электронная схема измерителя выполнена с возможностью измерения мгновенного расхода.
Предпочтительно то, что электронная схема измерителя выполнена с возможностью измерения общего интегрального расхода на основании числа переключенных выходных состояний и предварительно заданного масштабирования расход-частота.
Предпочтительно то, что параметр включает в себя расход.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Одно и то же цифровое обозначение отображает тот же самый элемент на всех чертежах. Чертежи не обязательно представлены в масштабе.
Фиг.1 изображает расходомер Кориолиса в технике предшествующего уровня.
Фиг.2 - блок-схема микроконтроллера в технике предшествующего уровня.
Фиг.3 - примерный частотный выходной сигнал в соответствии с вариантом реализации изобретения.
Фиг.4 - блок-схема последовательности операций в соответствии с вариантом реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Чертежи на Фиг.1-4 и нижеследующее описание демонстрируют конкретные примеры электронной схемы расходомера для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант изобретения. С целью пояснения принципов изобретения, некоторые обычные аспекты электронной схемы расходомера были упрощены или исключены. Специалистам в данной области техники будут очевидны возможные вариации этих примеров, которые находятся в пределах объема притязаний изобретения. Специалистам в данной области техники должно быть очевидно, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множественные вариации изобретения. Таким образом, изобретение не ограничивается описанными ниже конкретными примерами, но только пунктами формулы и их эквивалентами.
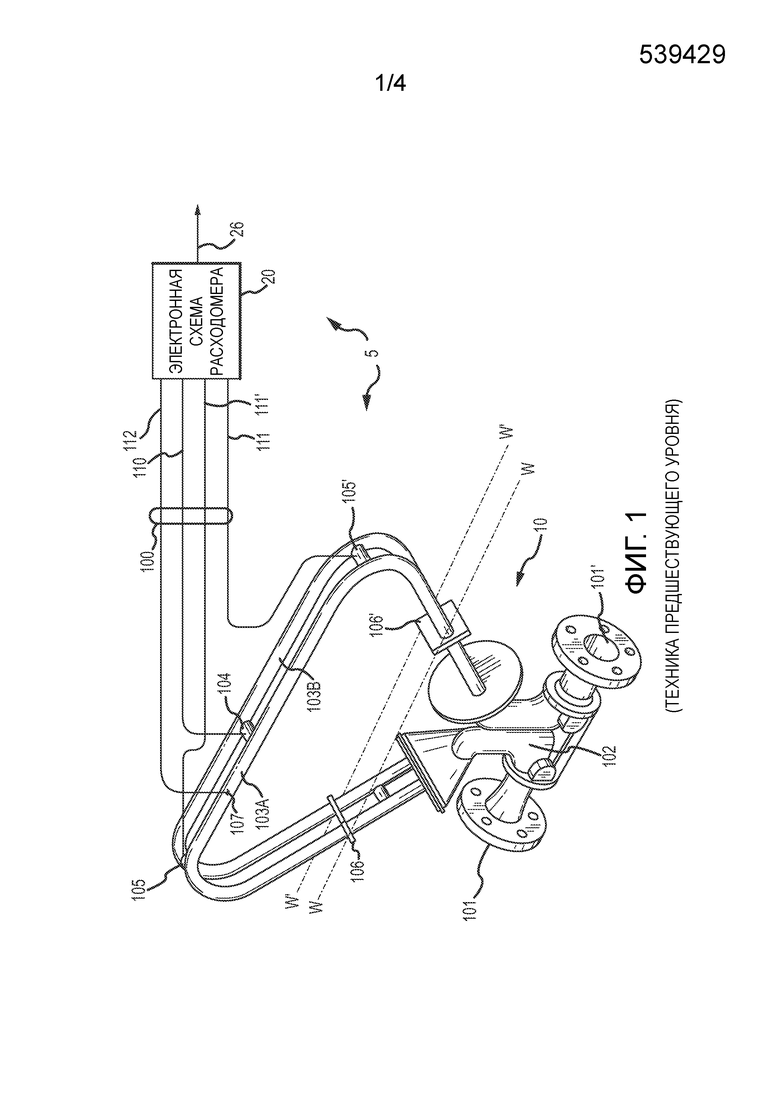
На Фиг.1 показан расходомер 5 Кориолиса техники предшествующего уровня. В качестве неограничительного примера, в данном случае предполагается, что варианты реализации настоящего изобретения могут быть вибрационными трубопроводными датчиками, включающими в себя массовые расходомеры Кориолиса и вибрационные денситометры. Как пример варианта реализации, расходомер 5 Кориолиса содержит сборку 10 датчика расходомера Кориолиса и электронную схему 20 измерителя. Электронная схема 20 измерителя соединяется со сборкой 10 датчика посредством канала 100 для предоставления массового расхода, плотности, объемного расхода, общей информации о массовом расходе, и другой информации по каналу 26. Канал 26 отображает множественные выходные порты, переносящие информацию по множественным каналам связи в соответствии с известными конструкциями расходомера (не показано на Фиг.1).
Сборка 10 датчика расходомера включает в себя пару фланцев 101 и 101′, манифольд 102 и расходомерные трубопроводы 103A и 103B. К расходомерным трубопроводам 103A и 103B присоединяется привод 104 и тензометрические датчики 105 и 105′ и датчик 107 температуры. Стягивающие скобы 106 и 106′ служат для задания осей W и W′, вокруг которых колеблется каждый из расходомерных трубопроводов 103A и 103B.
Когда сборка 10 датчика расходомера вставлена в магистральную трубопроводную систему (не показана на Фиг.1), которая транспортирует измеряемый материал, материал входит в сборку датчика расходомера 10 через фланец 101, проходит через манифольд 102, где материал направляется на вход расходомерных трубопроводов 103A и 103B, истекает через расходомерные трубопроводы 103A и 103B и назад в манифольд 102, откуда он выходит из сборки 10 датчика расходомера через фланец 101′. Расходомерные трубопроводы 103A и 103B подобраны и соответственно установлены на манифольде 102 так, чтобы иметь по существу то же самое массовое распределение, моменты инерции, и упругие модули относительно изгибных осей W-W и W′-W′ соответственно. Расходомерные трубопроводы 103A, 103B вытянуты от манифольда 102 по существу параллельным образом. Расходомерные трубопроводы 103A, 103B приводятся в движение приводом 104 в противоположных направлениях вокруг их соответственных изгибных осей W и W′, на которых локализуется первая несинфазная изгибная мода расходомера. Привод 104 может содержать любую из многих хорошо известных конфигураций, например магнит, смонтированный на расходомерном трубопроводе 103A, и противостоящая индукционная катушка, смонтированная на расходомерном трубопроводе 103B и через которую проходит переменный ток для возбуждения колебаний обоих расходомерных трубопроводов. Подходящий приводной сигнал подается электронной схемой 20 измерителя через кабельные соединения 110 на привод 104.
Тензометрические датчики 105 и 105′ прикреплены, по меньшей мере, к одному из расходомерных трубопроводов 103A и 103B на противоположных концах расходомерного трубопровода для измерения колебаний расходомерных трубопроводов. Когда расходомерные трубопроводы 103A, 103B колеблются, тензометрические датчики 105, 105′ создают первый тензометрический сигнал и второй тензометрический сигнал. Первый и второй тензометрические сигналы подаются на кабельные соединения 111 и 111′.
Датчик 107 температуры прикреплен, по меньшей мере, к одному из расходомерных трубопроводов 103A и 103B. Датчик 107 температуры измеряет температуру расходомерного трубопровода для модификации уравнений для температуры системы. По каналу 112 передается сигнал температуры от температурного датчика 107 на электронную схему 20 измерителя.
Электронная схема 20 измерителя принимает первый и второй тензометрические сигналы, появляющиеся на кабельных соединениях 111 и 111′ соответственно. Электронная схема 20 расходомера обрабатывает первый и второй тензометрические сигналы для вычисления массового расхода, плотности или другого свойства материала, проходящего через сборку 10 датчика расходомера. Эта вычисленная информация подается электронной схемой 20 измерителя по каналу 26 на средство использования (не показано на Фиг.1). В примерных вариантах реализации электронная схема 20 расходомера включает в себя примерный микроконтроллер (как показано на Фиг.2) для создания частотного выходного сигнала.
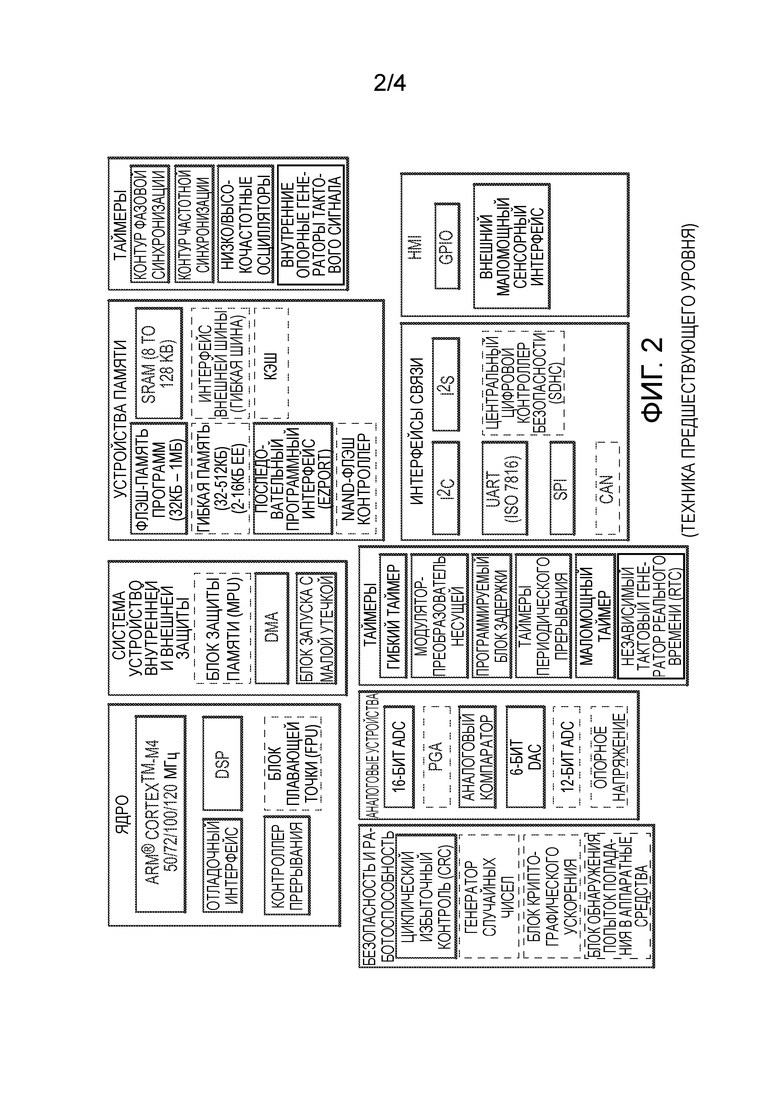
На Фиг.2 показана блок-схема микроконтроллера примера техники предшествующего уровня. В варианте реализации, примерный микроконтроллер включает в себя ядро и различные периферийные устройства. В вариантах реализации, ядро - это секция микроконтроллера, где осуществляются вычисления. В вариантах реализации, периферийные устройства могут включать в себя компоненты для систем, различные блоки памяти, генераторы тактовых сигналов, устройства безопасности и работоспособности, аналоговые устройства, таймеры, интерфейсы связи, и пользовательский машинный интерфейс (HMI) (также известный как человеческий машинный интерфейс (MMI)). Как часть примерного микроконтроллера, периферийные устройства, которые могут использоваться для создания частотного выходного сигнала, включают в себя: таймер/счетчик, универсальные штырьки ввода-вывода сигнала (GPIO), и разнообразие последовательных потоковых интерфейсов, таких как UARTS, SPORTS, I2C, SPI, и I2S. В соответствии с объектами настоящего изобретения, частотные выходные сигналы могут физически появляться на GPIO или на одном из последовательных интерфейсов связи (например. I2C, i2S или SPI).
На Фиг.3 показан примерный вариант реализации частотного выходного сигнала в соответствии с настоящим изобретением. При работе параметр, например расход, вычисляется известными способами периодически, с частотой 1 Гц в этом примере. Поскольку T (секунд)=1/f (Гц), известные вычисления могут быть использованы для определения параметра, например, расхода, для периодов времени (T)=0-1, 1-2, и 2-3 секунд.
При вычислении желаемой частоты выходного сигнала, используется выбранная пользователем норма (m) вычисления расхода (как описано ниже). В примере на Фиг.3 в течение первого периода (T=0-1 секунд), пользователь выбирает норму (m) вычисления расхода как 100 грамм/секунда. Каждый раз, когда определяется расход, желаемая частота, соответствующая этому расходу, также определяется, и эта частота выводится до следующего периода определения расхода. В примере первого периода, желаемая частота 10 Гц определена на основании вычисленного расхода (m) и введенного пользователем предварительно заданного масштабирования (x) расход-частота или отношения частоты к норме расхода. Например, для получения желаемой частоты 10 Гц с известным расходом 100 грамм/секунда, введенная пользователем предварительно заданное масштабирование (x) расход-частота составляет 0,1.
Как показано на Фиг.3, в течение первого периода, желаемая частота 10 Гц приводит к 10 целым выводимым импульсам, где каждый фронт импульса отображает переключение выходного состояния (например, от высокого уровня к низкому уровню или от низкого уровня к высокому уровню).
В течение второго периода, (T=1-2 секунды), например, используя известные способы вычисления, расход вычисляется повторно как 8 грамм/секунда. В примере второго периода, желаемая частота 0,8 Гц определена на основании вычисленного расхода (m) 8 грамм/секунда и введенного пользователем предварительно заданного масштабирования расход-частота ((x), также известное как отношение частоты к расходу) 0,1.
Как показано на Фиг.3, в течение второго периода, поскольку пользователь требует расход, вычисляемый при частоте 0,8 Гц, то выводится "0,8" всех импульсов. В этом примере, возникает только один фронт импульса (соответствующий переключенному выходному состоянию), и 1 целый импульс должен все же быть выведен. Соответственно, в T=2 секунды, дробный участок импульса "остается" и должен быть учтен в третьем периоде (T=2-3 секунды). В вариантах реализации настоящего изобретения, эта ситуация обозначается как дробные периоды импульсов (FP). Как описано ниже в алгоритме и таблице, дробные периоды импульсов (FP) могут быть вычислены на основании желаемой частоты (m*x), периода (p) инициализированного входного тактового сигнала, и предыдущего дробного импульса (FP); (FP=FP+(m*x*p)).
Более подробно на Фиг.3 в примерном варианте реализации период (p) инициализированного входного тактового сигнала устанавливается при 20 Гц. При 20 случаях в секунду, следующий алгоритм выполняется примерным микроконтроллером в расходомере для определения и последующей установки желаемого выходного состояния на каждый период (p) входного тактового сигнала.
Основной алгоритм задается следующим вычислением:
Период входного тактового сигнала = р
(например, 20Гц, р = 0,05 с)
Дробные импульсы
<для каждого периода входного тактового сигнала>
Дробные импульсы = Дробные импульсы + (m*x*p)
Если (Дробные импульсы>=0,5) {
Дробные импульсы = Дробные импульсы - 0,5;
Переключить состояние выхода
}
Нижеследующая таблица - это период входного тактового сигнала в примере, показывающем вычисления и вывод алгоритма в применении к Фиг.3.
Как пример дробного импульса (FP), "остаток" в 0,8 Гц, который не был произведен во второй период (T=1-2 секунды) отслеживается в третьем периоде (T=2-3 секунды) через значение "0,30" в сумматоре. Используемая как начальное значение в периоде (T=2-3 секунды), "0,30" - это величина, остающаяся при 1,95 секундах.
Кроме того, как показано в вышеприведенной таблице и на Фиг.3, время между фронтами (где выходное состояние остается или низкого уровня или высокого уровня) - это период желаемой частоты выходного сигнала.
Используя период желаемой частоты выходного сигнала, расходомер может измерять мгновенный расход. Например, для примерного периода выходного сигнала, используя уравнение: T (секунда)=1/f (Гц) и отношение частоты к норме расхода (x), мгновенный расход может быть определен из следующего уравнения: мгновенный расход (г/с)=желаемая частота (Гц)/отношение частоты к норме расхода (x).
Кроме того, общий интегральный расход также может быть определен, считая число переключаемых выходных состояний и учитывая отношение частоты к норме расхода (x). Например, на Фиг.3 в первый период (T=0-1 секунда), 10 переключенных выходных состояний, умноженные на отношение частоты к норме расхода (x) в 0,1=100 грамм/секунда полного интегрального расхода.
В отличие от вышеприведенного примера на Фиг.3, где 10 Гц отображают 100 грамм/секунда, в другом варианте реализации, например, 100 Гц могут отображать 100 грамм/секунда. В этом новом примере, каждый целый импульс теперь отображает 1 грамм. Соответственно, настоящее изобретение не предполагает ограничение каким-либо конкретным значением отношения частоты к норме расхода (x).
Аналогично, изобретение также не ограничено значением периода (p) входного тактового сигнала. Как пример, и как отмечено выше, настоящее изобретение предоставляет точное отображение дрожания фазы за данный период (p) входного тактового сигнала. Настоящее изобретение может использовать следующее уравнение для определения процента максимального дрожания фазы:
Макс. Дрожание фазы (%)=Макс. Частота Выходного сигнала (Гц)/Частота Входного Тактового сигнала (Гц)
Используя вышеупомянутое уравнение, если желательна частота выходного сигнала от 0 до 10 кГц с дрожанием фазы меньше чем 0,1%, то требуется входной тактовый сигнал (p) 10 МГц.
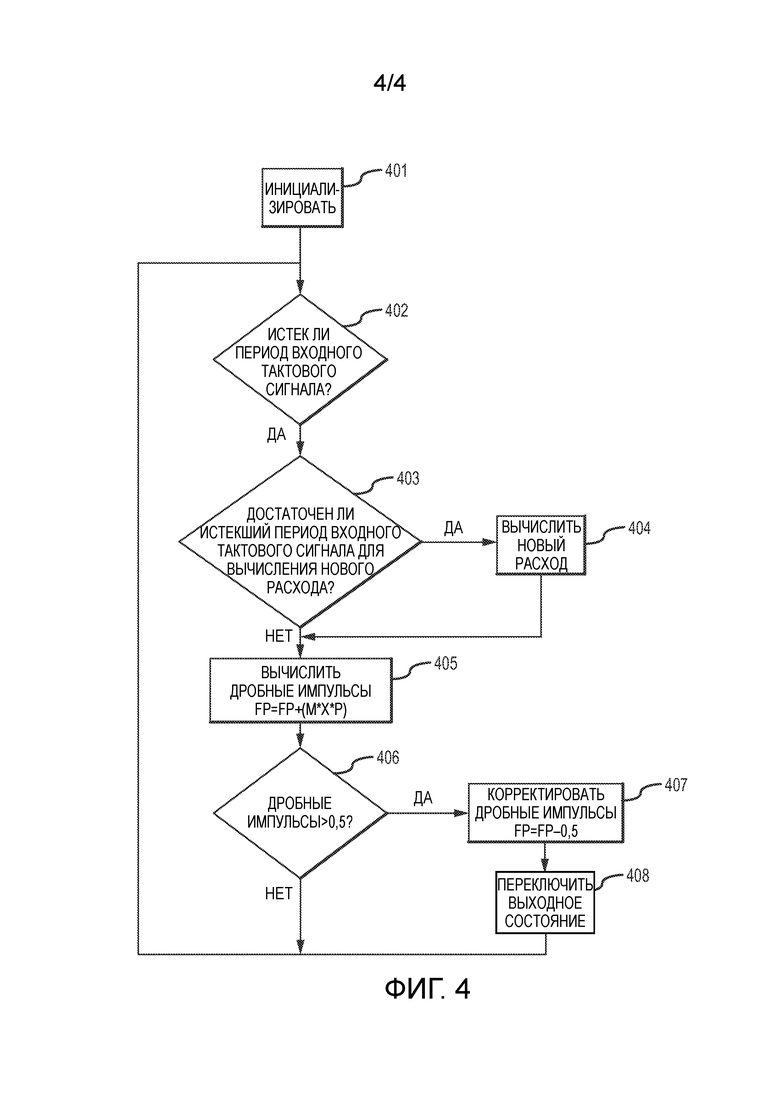
На Фиг.4 представлена блок-схема последовательности операций в соответствии с вариантом реализации настоящего изобретения. На Этапе 401 инициализируется входной тактовый сигнал, имеющий предварительно заданный период из множества периодов. Затем на Этапе 402 выполняется определение, истек ли период входного тактового сигнала. При этом входной тактовый сигнал устанавливается как предварительно заданная, фиксированная частота. Например, если бы входной тактовый сигнал имел частоту 1 MГц, каждый период входного тактового сигнала составлял бы 1 мкс. Соответственно, входной тактовый сигнал представляет собой выбираемую пользователем часть схемы и, поэтому, является предварительно заданным. В определенных вариантах реализации настоящего изобретения, входной тактовый сигнал - это самый быстрый тактовый сигнал в расходомере. Если при работе входной тактовый сигнал не был самым быстрым тактовым сигналом, то различные способы могут быть использованы для определения того, когда входной тактовый сигнал истекает, например, опрос или программное прерывание.
Если период входного тактового сигнала истек, на Этапе 403 выполняется определение того, достаточно ли периодов входного тактового сигнала истекло, так, чтобы новый расход мог быть вычислен. Это имеет отношение к "выбираемой пользователем норме вычисления расхода (m)". Например, если входной тактовый сигнал - 10 000 Гц и пользователь хочет вычислять расход при 10 Гц, то (10000 Гц/10 Гц=100), 100 входных тактовых сигналов должны истечь при вычислении расхода.
Если на Этапе 403 определяется "ДА", на Этапе 404 вычисляется новый расход. Вычислением нового расхода, желаемая частота (m*x) может быть вычислена на основании вычисленного расхода (m) и введенной пользователем предварительно заданного масштабного отношения расход-частота (x). Если на Этапе 403 определяется "НЕТ", на Этапе 405 дробные периоды импульсов (FP) вычисляются на основании желаемой частоты (m*x), периода инициализированного входного тактового сигнала, и предыдущего дробного импульса (FP); (FP=FP+(m*x*p)). Однако, если предыдущий дробный импульс - это начальный дробный импульс, то предыдущий дробный импульс может быть установлен на нуль.
На Этапе 406 выполняется определение, больше ли дробные периоды импульсов, или равны половине периода выходного импульса, или 0,5, где период выходного импульса определяется относительно частоты (p=1/f). Если так, то дробный период импульсов соответствует такой длительности, чтобы период выходного сигнала истек. Если дробные импульсы не больше чем или равны 0,5, то результирующий период импульса является входным сигналом для Этапа 402.
Если дробные импульсы на Этапе 406 больше чем или равны 0,5, на Этапе 407, дробные импульсы корректируются следующим уравнением, FP=FP-0,5. Дробный импульс теперь представляет собой значение остатка и вызывает переключение выходного состояния.
На Этапе 408 желаемая частота теперь предоставляется для конкретного расхода, переключая выходное состояние, когда дробные периоды импульсов больше чем или равны половине периода выходного импульса. Операция тогда продолжается в цикле, поскольку результирующий дробный импульс является вводом на Этап 402.
В примерных вариантах реализации, аппаратные средства последовательного выхода, обычно "встроенные" в микроконтроллер, могут быть использованы для облегчения нагрузки обработки. Этот тип аппаратных средств включает в себя, но без ограничения I2S, SPI, USARTS/ARTS, "SPORTS", и даже некоторые порты JTAG. Кроме того, DMA также может быть использовано для облегчения нагрузки обработки.
Для введения различных типов аппаратных средств последовательного выхода (например, SPI, DMA, и т.д), "блоки" выходных состояний должны быть предварительно вычислены и затем предоставлены аппаратным средствам для выведения при "входной тактовой частоте". Это – преимущественно, потому что уменьшает требования к полосе пропускания, уменьшая заголовок каждого выходного вычисления. Например, с SPI, блок 8, 16 или 32 выходных состояний может быть предварительно вычислен и затем "автоматически" выведен стандартными аппаратными средствами SPI. Средство DMA может быть использовано для дополнительного увеличения размера блока до любого желаемого размера.
Преимущественно то, что настоящее изобретение может легко быть расширено до введения какого-либо из "других аспектов" (квадратура, длительность импульса и т.д.).
Преимущественно то, что настоящее изобретение может быть полностью масштабируемым по любому желаемому диапазону частот выходного сигнала, ограниченному только разрешающей способностью определенных типов данных, выбранных для осуществления расчетов, и входной частотой тактового сигнала. В вариантах реализации стандартные типы данных включают в себя целые числа (например 8, 16, 32 или 64 бита) или с плавающей запятой (обычно IEEE534 с одинарной или двойной точностью).
Настоящее описание показывает конкретные примеры для демонстрации специалистам в данной области техники того, как наилучшим образом использовать изобретение. С целью демонстрации принципов изобретения, некоторые обычные объекты были упрощены или опущены. Специалисты в данной области техники увидят вариации этих примеров, которые находятся в пределах объема притязаний изобретения.
Подробные описания вышеупомянутых вариантов реализации не являются исчерпывающими описаниями всех вариантов реализации, рассматриваемых авторами как находящиеся в пределах объема притязаний изобретения. Действительно, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов реализации могут быть по-разному объединены или устранены для создания дополнительных вариантов реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний и принципов изобретения. Специалистам в данной области техники будет также очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично для создания дополнительных вариантов реализации в пределах объема притязаний и принципов изобретения.
Таким образом, хотя конкретные варианты реализации и примеры для изобретения описаны здесь в иллюстративных целях, в пределах объема притязаний изобретения возможны различные эквивалентные модификации, как должно быть ясно специалистам в данной области техники. Предоставленные здесь принципы могут быть применены к другим вариантам реализации, отличным от описанных выше и показанных на сопровождающих чертежах. Соответственно, объем притязаний изобретения определяется из нижеследующей формулы.

Предоставляются устройство и способ для создания цифровых последовательных частотных выходных сигналов в расходомере Кориолиса. Способ генерирования частотного выходного сигнала на микроконтроллере содержит: инициализацию входного тактового сигнала, имеющего предварительно заданный период; вычисление параметра на основании предварительно заданного периода; вычисление желаемой частоты на основании параметра и предварительно заданного масштабирования расход-частота; вычисление множества дробных импульсов, каждый дробный импульс из множества дробных импульсов вычисляется на основании желаемой частоты, предварительно заданного периода входного тактового сигнала и значения предыдущего дробного импульса; и вывод желаемой частоты посредством переключения выходного состояния, когда вычисленный дробный импульс больше или равен половине периода выходного импульса. Технический результат - обеспечение низкого уровня дрожания фазы для данного входного тактового сигнала, наибольшей возможной точности счета импульсов, наибольшей возможной абсолютной точности, упрощение осуществления других настроек (включая квадратуру, длительность импульса и т.д.) и исключение специализированных внешних аппаратных средств, т.е. осуществление обычными доступными аппаратными средствами с последовательным выходом, имеющимися в большинстве микроконтроллеров. 2 н. и 10 з.п. ф-лы, 4 ил.
1. Способ генерирования частотного выходного сигнала на микроконтроллере, содержащий:
инициализацию входного тактового сигнала, имеющего предварительно заданный период;
вычисление параметра на основании предварительно заданного периода;
вычисление желаемой частоты на основании параметра и предварительно заданного масштабирования расход-частота;
вычисление множества дробных импульсов, причем
каждый дробный импульс из множества дробных импульсов вычисляется на основании желаемой частоты, предварительно заданного периода входного тактового сигнала и значения предыдущего дробного импульса, и
вывод желаемой частоты посредством переключения выходного состояния, когда вычисленный дробный импульс больше или равен половине периода выходного импульса.
2. Способ по п. 1, в котором, если предыдущий дробный импульс является начальным дробным импульсом, значение предыдущего дробного импульса устанавливается равным нулю.
3. Способ по п. 1, в котором период выходного импульса вычисляется на основании предварительно заданного периода входного тактового сигнала, вычисленного параметра и предварительно заданного масштабирования расход-частота.
4. Способ по п. 1, в котором электронная схема измерителя выполнена с возможностью измерения мгновенного расхода.
5. Способ по п. 1, в котором электронная схема измерителя выполнена с возможностью измерения общего интегрального расхода на основании числа переключенных выходных состояний и предварительно заданного масштабирования расход-частота.
6. Способ по п. 1, в котором параметр включает в себя расход.
7. Вибрационный расходомер (5), содержащий:
сборку (10) датчика расходомера, включающую в себя один или несколько расходомерных трубопроводов (103A, 103B) и первый и второй тензометрические датчики (105, 105');
привод (104), выполненный с возможностью возбуждения колебаний одного или нескольких расходомерных трубопроводов (103A, 103B); и электронную схему (20) измерителя, связанную с первым и вторым тензометрическими датчиками (105 105') и связанную с приводом (104), причем электронная схема (20) измерителя генерирует частотный выходной сигнал, будучи выполненной с возможностью:
инициализации входного тактового сигнала, имеющего предварительно заданный период;
вычисления параметра на основании предварительно заданного периода;
вычисления желаемой частоты на основании вычисленного параметра и предварительно заданного масштабирования расход-частота;
вычисления множества дробных импульсов, причем
каждый дробный импульс из множества дробных импульсов вычисляется на основании желаемой частоты, предварительно заданного периода входного тактового сигнала и значения предыдущего дробного импульса, и
вывода желаемой частоты посредством переключения выходного состояния, когда вычисленный дробный импульс больше или равен половине периода выходного импульса.
8. Устройство по п. 7, в котором, если предыдущий дробный импульс является начальным дробным импульсом, значение предыдущего дробного импульса устанавливается равным нулю.
9. Устройство по п. 7, в котором период выходного импульса вычисляется на основании предварительно заданного периода входного тактового сигнала, вычисленного параметра и предварительно заданного масштабирования расход-частота.
10. Устройство по п. 7, в котором электронная схема измерителя выполнена с возможностью измерения мгновенного расхода.
11. Устройство по п. 7, в котором электронная схема измерителя выполнена с возможностью измерения общего интегрального расхода на основании числа переключенных выходных состояний и предварительно заданного масштабирования расход-частота.
12. Устройство по п. 7, в котором параметр включает в себя расход.
| JP 3679389 B2, 03.08.2005 | |||
| US 4843890 A1, 04.07.1989 | |||
| US 4491025 A1, 01.01.1985 | |||
| US 4192184 A1, 11.03.1980. |

