ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к устройству (например, к пылесосу или воздухоочистителю), содержащему воздушный фильтр, и к способу мониторинга воздушного фильтра.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Пылесосы имеют недостаток, состоящий в том, что фильтры засоряются после использования в течение некоторого времени. Этот эффект является трудноразличимым пользователями, поскольку загрязнение фильтров является медленным процессом. При обычном использовании может пройти более полугода, прежде чем производительность пылесоса уменьшится.
Некоторые пылесосы снабжены реле давления, измеряющим перепад давления на фильтре. Недостаток этого принципа состоит в том, что при изменении потока перепад давления не связан прямо с загрязнением фильтра. При уменьшении потока посредством изменения установочного параметра регулятора скорости перепад давления уменьшится и, таким образом, сигнал, генерируемый реле давления, может измениться с «загрязненный» на «чистый», тогда как загрязнение фильтра не изменилось. Также, будет наблюдаться существенная разница в потоке, при использовании пылесоса на ковре, по сравнению с его использованием на твердом полу.
EP 0479609 описывает пылесос, в котором статическое давление и диапазон изменения статического давления, возникающие при работе порта всасывания, детектируются с помощью датчика давления, обеспеченного на задней стороне фильтра, и качество воздуха у порта всасывания вычисляют на основании тока, скорости вращения двигателя вентилятора и статического давления.
JP 2008301878 обеспечивает пылесос, способный детектировать засорение фильтра, через который воздух из пылеуловительной камеры проходит к электрическому вентилятору. Пыль, засасываемая при работе электрического вентилятора, накапливается внутри пылесборника, и воздух из пылесборника проходит через фильтр к электрическому вентилятору. Количество пыли, накопленной в пылесборнике, детектируется посредством пылевого датчика, а скорость воздушного потока электрического вентилятора детектируется посредством части детектирования скорости воздушного потока на основе изменения электрического тока в электрическом вентиляторе. Когда результат детектирования посредством пылевого датчика предполагает, что количество пыли не превышает предписанного количества, и когда результат детектирования посредством части детектирования скорости воздушного потока предполагает, что скорость воздушного потока не превышает предписанную малую скорость воздушного потока, часть определения загрязнения фильтра определяет, что фильтр засорен.
US 4294595 раскрывает устройство автоматического выключения для пылесоса типа «чистый воздух», в котором вентилятор пылесоса находится сзади по ходу от канала загрязненного воздуха и фильтра пылесоса. Реле перепада давления или реле воздушного потока присоединено между входным отверстием сопла канала загрязненного воздуха пылесоса и каналом чистого воздуха, после прохода этого воздушного потока через мешочный фильтр. Реле перепада давления срабатывает в качестве реакции на изменение потока воздуха через систему и обеспечивает прерывание питания двигателя пылесоса и, одновременно, предупреждает оператора о том, что фильтр заполнен, или о том, что имеется засорение где-то вдоль, по существу, всей длины канала загрязненного воздуха.
US 5294872 раскрывает пылесос, в котором посредством детектирования скорости вращения двигателя вентилятора с переменной скоростью вращения, выполненного с возможностью обеспечения всасывающей силы для пылесоса и некоторого диапазона ее изменения, распознают состояние засорения фильтра и состояние очищаемой поверхности и команду регулирования скорости двигателя вентилятора корректируют на основе результата распознавания и, посредством обеспечения оптимальной силы всасывания, может быть выполнена качественная очистка.
Системы мониторинга предшествующего уровня техники не справляются эффективно с изменением потока и установочными параметрами мощности. Это приводит тому, что системы, которые правильно сигнализируют о загрязненном фильтре, после уменьшения мощности снова покажут, что фильтр не загрязнен, тогда как фильтр загрязнен так же, как и раньше. С другой стороны, эти устройства слишком рано покажут, что фильтр загрязнен, при высоких потоках, например, когда сопло не находится на полу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Среди прочего, задачей изобретения является обеспечение улучшенного мониторинга воздушного фильтра. Данное изобретение определено независимыми пунктами формулы изобретения. Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения.
В способе мониторинга загрязнения воздушного фильтра в устройстве, в котором воздушный поток, генерируемый вентилятором, сцепленным с двигателем, проходит воздушный фильтр, загрязнение определяют с использованием данных, представляющих
перепад давления на вентиляторе,
перепад давления на воздушном фильтре, и
ток двигателя для двигателя.
Показано, что комбинация измерения перепада давления на вентиляторе и тока двигателя обеспечивает достоверное предсказание потока независимо от установочного параметра мощности.
Комбинация предсказания потока и падения давления на фильтре может быть объединена с параметром, связанным с сопротивлением фильтра, и, таким образом, загрязнением.
Воздушный фильтр может быть фильтром двигателя, выпускным фильтром или любым другим фильтром на пути потока.
Эти и другие аспекты данного изобретения явствуют из вариантов осуществления, описанных ниже, и будут объяснены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
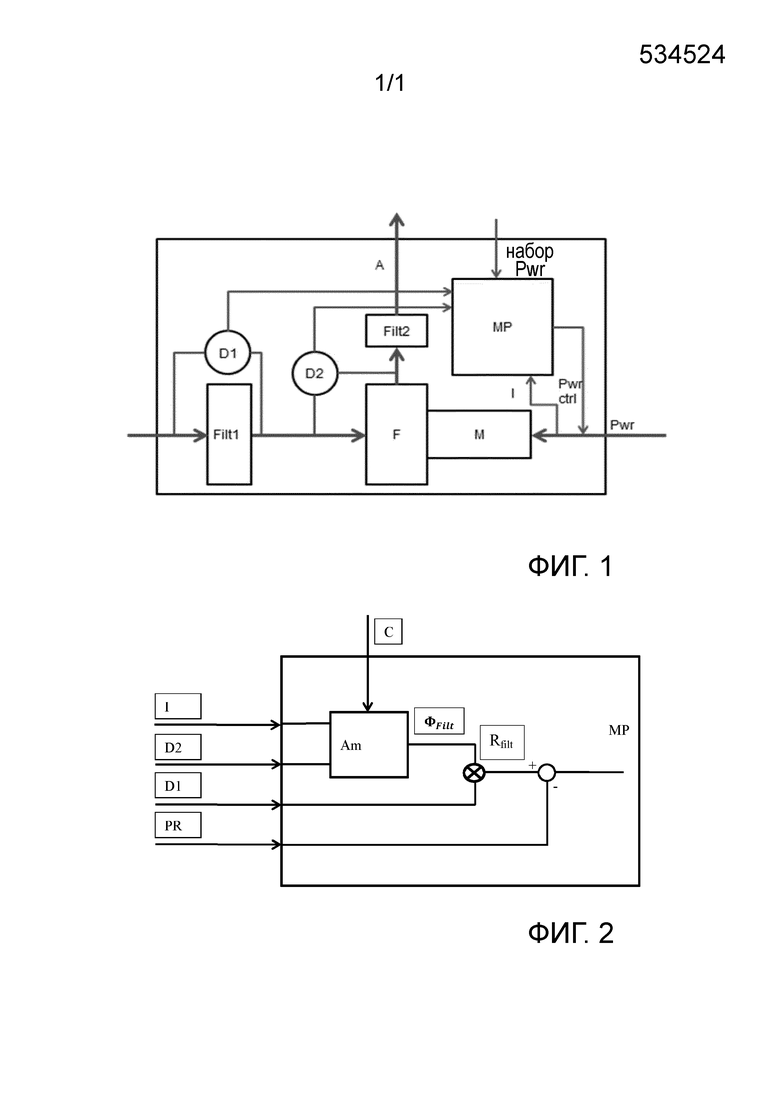
Фиг. 1 показывает вариант устройства согласно данному изобретению;
Фиг. 2 показывает вариант осуществления работы микропроцессора в устройстве фиг. 1.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 показывает вариант устройства согласно данному изобретению. Воздушный поток А проходит фильтр двигателя Filt1, вентилятор F, который сцеплен с двигателем M, принимающим электрический сигнал мощности Pwr, и выпускной фильтр Filt2. Первый датчик перепада давления D1 измеряет перепад давления на фильтре двигателя Filt1, а второй датчик перепада давления измеряет перепад давления на вентиляторе F. Микропроцессор MP принимает сигналы от датчиков перепада давления D1 и D2, а также набор сигналов установочного параметра мощности Pwr, ток I через двигатель M, для создания сигнала управления мощностью Pwr Ctrl для двигателя M.
Данное изобретение основано на следующих соображениях. Сопротивление фильтра увеличится при загрязнении фильтра. Сопротивление фильтра может быть известно из знания воздушного потока и перепада давления на фильтре двигателя Filt1. Известным решением является измерение только перепада давления на фильтре Filt1 в качестве указания на загрязнение фильтра. Однако, поскольку набор установочных параметров мощности Pwr устройства может регулироваться конечным пользователем, поток будет изменяться и, таким образом, перепад давления на фильтре Filt1 будет изменяться. Таким образом, при условии этих изменений необходимо знать как воздушный поток, так и перепад давления, для установления сопротивления фильтра. Прямое измерение потока является относительно дорогостоящим и сложным. Было исследовано получение потока на основании комбинации входных и выходных параметров комбинации двигатель-вентилятор. Показано, что комбинация измерения увеличения давления Δp на вентиляторе F и тока двигателя I обеспечивает достоверное предсказание потока независимо от набора установочных параметров мощности Pwr. Измерение напряжения двигателя является менее перспективным, поскольку двигатель является относительно термочувствительным при постоянном напряжении. Измерение скорости вращения двигателя возможно, но оно является более дорогостоящим, чем измерение тока двигателя.
В устройстве, имеющем воздушный фильтр, доступны следующие параметры:
U=Сетевое напряжение
I=Ток двигателя
Ũ=Напряжение для двигателя, обеспеченное регулятором скорости
ω=Скорость вращения двигателя и вентилятора
T=Крутящий момент двигателя и вентилятора
Φ=Воздушный поток, создаваемый вентилятором
Δр=давление, создаваемое вентилятором.
В то время как измерение воздушного потока является довольно сложным в домашних пылесосах, часть данного изобретения предназначена для получения приближения потока на основании других параметров из списка, приведенного выше, посредством вычисления. Предпочтительным способом является вычисление потока в виде функции Δр и I. Другим способом является вычисление потока в виде функции Δр и ω или (хотя и сложнее) использование T вместо I; ω или T могут быть, таким образом, использованы в качестве данных, представляющих I в определении формулы изобретения.
Измерения, включающие в себя перепад давления на фильтре, подают в микропроцессор, который выполнит вычисление посредством определенного алгоритма и сгенерирует параметр, связанный с уровнем загрязнения фильтра. В зависимости от значения этого параметра будет сгенерирована информация, которая может быть использована для обеспечения обратной связи с пользователем относительно состояния фильтра. Эта информация может быть также использована для управления функциями в пылесосе, например для управления потоком.
Математический подход состоит в следующем. Если фильтр двигателя загрязняется через некоторое время, то его сопротивление увеличивается. Сопротивление фильтра может быть описано с помощью общей динамики текучих сред следующим образом:
RFilt=ΔрFilt/Φ2Filt,
где RFilt=Сопротивление фильтра;
ΦFilt=Воздушный поток через фильтр;
ΔрFilt=Перепад давления на фильтре.
Это означает, что сопротивление может быть вычислено, если знать поток и перепад давления. Перепад давления ΔрFilt может быть измерен посредством датчика давления.
Поток ΦFilt может быть измерен, но это является относительно сложным, поэтому идея состоит в том, чтобы вычислить поток из известных или легко измеряемых системных параметров.
Эксперименты показали, что комбинация тока двигателя и давления, создаваемого двигателем, может обеспечить математическую модель, описывающую поток с достаточной точностью.
В общем, это соотношение может быть записано следующим образом:
ΦFilt=ΦMotor=f(IMotor, ΔрMotor),
где IMotor=Ток двигателя;
ΔрMotor=Давление, создаваемое двигателем.
Эта функция f описывает поверхность в пространстве (ΦFilt, IMotor, ΔрMotor).
Посредством измерений можно найти многочисленные точки на этой поверхности. Посредством обработки измеренных данных с использованием множественной нелинейной регрессии можно найти приближение этой поверхности в виде трехмерной полиномиальной функции.
Процесс вычисления:
Измеренные значения

где q=количество измерений.
Посредством множественных нелинейных регрессий это может быть преобразовано в полиномиальное приближение:

где N=Степень многочлена;
amn=Коэффициенты многочлена.
В общем, приближение будет более точным при более высоких степенях. На практике, степень (N) выбирают таким образом, чтобы точность была в пределах требований.
Пример такого приближения:
Измерения показали, что приближение второй степени, с N=2, как представляется, являются достаточными для оценки потока с точностью в пределах 5%.
В случае N=2, многочлен записывается следующим образом:
Φapproximated=a00+a10· I+a20 · I2+a11 · I · Δр+a01 · Δp+a02 · Δp2 [4].
Коэффициенты amn могут быть определены посредством описанного способа и могут быть введены в виде фиксированных чисел в микропроцессор. При введении также формулы в виде алгоритма в микропроцессор поток может быть вычислен с использованием измеренного тока и создаваемого давления в качестве входных данных.
Для обеспечения возможности ввода коэффициентов в виде фиксированных значений в микропроцессор следует обеспечить, чтобы точность для отдельных пылесосов все же соответствовала требованиям. Для обеспечения этого алгоритм вычисляют на основе измерений многочисленных устройств и этот «средний» алгоритм сравнивают с отдельными измерениями.
Следует понимать, что коэффициенты зависят от фактического исполнения пылесоса. Характеристики двигателя и вентилятора будут изменяться в некоторой степени, но в пределах одной конструкции продукта предполагается, что эти изменения являются достаточно малыми для удовлетворения техническим условиям в отношении точности. На практике это будет означать, что все разные конструкции продукта будут иметь одинаковый алгоритм, в котором разными будут только коэффициенты. Эти коэффициенты могут быть загружены в микропроцессор после загрузки алгоритма. Посредством формулы [1] и измерения перепада давления на фильтре может быть вычислено сопротивление фильтра. Как только сопротивление превысит предварительно заданное значение, будет сгенерирован сигнал о загрязненном фильтре.
В тестовой среде хорошие результаты были получены с использованием следующей формулы (где Φ измеряется в [1/с], Δр в [гПа], а I в [A]):
Φapproximated=-15,612+13,434 · I–0,29 · Δр+0,039 · I · Δр–0,877 · I2-0,00013 · Δр2 [5].
В реальной среде подходящие коэффициенты могут быть найдены посредством измерения фактического потока и настройки коэффициентов до тех пор, пока приближенный поток не будет достаточно соответствовать фактическому потоку. Эти коэффициенты могут быть затем запрограммированы в микропроцессоре MP.
Ввиду вышеупомянутых соображений, фиг. 2 показывает работу микропроцессора MP в устройстве фиг. 1. В микропроцессоре MP посредством алгоритма Am с использованием коэффициентов C поток ΦFilt вычисляют на основании тока двигателя I и перепада давления на вентиляторе, определяемого вторым датчиком перепада давления D2. Сопротивление фильтра RFilt вычисляют на основании ΦFilt и перепада давления на фильтре двигателя Filt1, определяемого первым датчиком перепада давления D1. Сопротивление фильтра представляет загрязнение воздушного фильтра: чем выше загрязнение, тем выше будет сопротивление фильтра.
Если необходимо наличие двоичного выходного сигнала о том, что воздушный фильтр должен быть заменен или очищен (например, для включения предупредительного светового сигнала), то предварительно заданное сопротивление PR может быть вычтено из сопротивления фильтра RFilt: если разность является положительной, то фильтр является слишком загрязненным и должен быть заменен или очищен, в то время как если результат является отрицательным, то фильтр еще не является слишком загрязненным и еще не должен быть заменен или очищен.
Следует отметить, что вышеупомянутые варианты осуществления иллюстрируют, а не ограничивают данное изобретение и что специалисты в данной области техники могут разработать многие альтернативные варианты осуществления, не выходя за рамки объема прилагаемой формулы изобретения. В формуле изобретения любые ссылочные позиции, расположенные в скобках, не должны толковаться в качестве ограничения формулы изобретения. Слово «содержащий» не исключает наличия элементов или этапов, отличных от элементов или этапов, перечисленных в формуле изобретения. Слово «один» или «некоторый», предшествующее элементу, не исключает наличия множества таких элементов. Данное изобретение может быть реализовано посредством аппаратного обеспечения, содержащего некоторые отдельные элементы, и/или посредством соответствующим образом запрограммированного процессора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЧИСТКИ ФИЛЬТРА ПЫЛЕСОСНОГО АППАРАТА И ПЫЛЕСОСНЫЙ АППАРАТ | 2014 |
|
RU2654420C2 |
| ПЫЛЕСОС | 2010 |
|
RU2533092C2 |
| СПОСОБ ОПТИМИЗАЦИИ СРОКА СЛУЖБЫ ФИЛЬТРА МЕЖДУ ЗАМЕНАМИ И СИСТЕМА ДЛЯ ТЕКУЩЕГО КОНТРОЛЯ СОСТОЯНИЯ ФИЛЬТРОВЕНТИЛЯЦИОННОЙ СИСТЕМЫ | 2017 |
|
RU2720221C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2604456C2 |
| Подвеска вентиляторного блока | 2020 |
|
RU2770249C1 |
| ПЫЛЕСОС ДЛЯ ВЛАЖНОЙ УБОРКИ | 2021 |
|
RU2832876C1 |
| ЦИКЛОННЫЙ БЛОК ДЛЯ ИСПОЛЬЗОВАНИЯ В ПЫЛЕСОСЕ ДЛЯ ВЛАЖНОЙ УБОРКИ | 2021 |
|
RU2834219C1 |
| УСТРОЙСТВО И СПОСОБ ВЛАЖНОЙ УБОРКИ | 2021 |
|
RU2840260C1 |
| УЗЕЛ ДЛЯ НАГНЕТАНИЯ ВОЗДУХА, СОДЕРЖАЩЕГО ЧАСТИЦЫ, И ДЛЯ ОТДЕЛЕНИЯ ЧАСТИЦ ОТ ВОЗДУХА | 2010 |
|
RU2542561C2 |
| ПЫЛЕСОС | 2017 |
|
RU2664227C1 |
В способе мониторинга загрязнения воздушного фильтра (Filt1) в устройстве, в котором воздушный поток (A), генерируемый вентилятором (F), сцепленным с двигателем (M), проходит воздушный фильтр (Filt1), загрязнение определяют с использованием данных, представляющих перепад давления (D2) на вентиляторе (F), перепад давления (D1) на воздушном фильтре и ток двигателя (I) для двигателя (M). Этот способ предусматривает этапы: оценку потока через воздушный фильтр на основании данных, представляющих перепад давления (D2) на вентиляторе (F) и ток двигателя (I) для двигателя (M), оценку сопротивления воздушного фильтра на основании данных, представляющих поток через воздушный фильтр и перепад давления (D1) на воздушном фильтре, и оценку загрязнения воздушного фильтра на основании данных, представляющих сопротивление фильтра воздушного фильтра. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ мониторинга загрязнения воздушного фильтра (Filt1) в устройстве, в котором воздушный поток (A), генерируемый вентилятором (F), сцепленным с двигателем (M), проходит воздушный фильтр (Filt1), отличающийся тем, что предусматривает этапы:
оценки потока через воздушный фильтр на основании данных, представляющих перепад давления (D2) на вентиляторе (F) и ток двигателя (I) для двигателя (M),
оценки сопротивления фильтра воздушного фильтра на основании данных, представляющих поток через воздушный фильтр и перепад давления (D1) на воздушном фильтре, и
оценки загрязнения воздушного фильтра на основании данных, представляющих сопротивление фильтра воздушного фильтра.
2. Способ по п. 1, в котором загрязнение воздушного фильтра оценивают на основании сравнения сопротивления фильтра воздушного фильтра с пороговым значением (PR).
3. Устройство, содержащее:
воздушный фильтр (Filt1),
двигатель (M), соединенный с вентилятором (F), для генерации воздушного потока (A) через воздушный фильтр (Filt1), и
процессор (MP) для определения загрязнения воздушного фильтра (Filt1), отличающееся тем, что процессор выполнен с возможностью
оценки потока через воздушный фильтр на основании данных, представляющих перепад давления (D2) на фильтре (F) и ток двигателя (I) для двигателя (M),
оценки сопротивления фильтра воздушного фильтра на основании данных, представляющих поток через воздушный фильтр и перепад давления (D1) на воздушном фильтре, и
оценки загрязнения воздушного фильтра на основании данных, представляющих сопротивление фильтра воздушного фильтра.
4. Устройство по п. 3, в котором процессор выполнен с возможностью оценки загрязнения воздушного фильтра на основании
сравнения сопротивления фильтра воздушного фильтра с пороговым значением (PR).
| Установка для сборки изделий | 1974 |
|
SU479609A1 |
| US 4983895 A, 08.01.1991 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

