Область техники, к которой относится изобретение
Настоящее изобретение относится к расходомерам, а более конкретно к способу и устройству для определения и применения переменных алгоритмов обнуления к вибрационному расходомеру в переменных условиях эксплуатации.
Уровень техники
Вибрационные датчики, такие как, например, вибрационные плотномеры и расходомеры Кориолиса, в целом, известны и используются, чтобы измерять массовый расход и другую информацию для веществ, протекающих через трубу в расходомере. Примерные расходомеры Кориолиса раскрываются в патенте США 4109524, патенте США 4491025 и деле 31450, все для Дж. Е. Смита и др. Эти расходомеры имеют одну или более труб прямой или изогнутой конфигурации. Конфигурация каждой трубы в кориолисовом массовом расходомере, например, имеет множество режимов свободных колебаний, которые могут иметь тип простого изгиба, торсионный или соединенный тип. Каждая труба может приводиться в колебание в предпочтительном режиме.
Вещество протекает в расходомер из подсоединенного трубопровода на впускной стороне расходомера, направляется через трубу(ы) и выходит из расходомера через выпускную сторону расходомера. Режимы свободного колебания вибрационной системы определяются частично посредством объединенной массы труб и вещества, протекающего в трубах.
Когда нет потока через расходомер, возбуждающая сила, прикладываемая к трубе(ам), вынуждает все точки вдоль трубы(труб) колебаться с идентичной фазой или небольшим "корректированием нуля", которое является временной задержкой, измеренной при нулевом расходе. Когда вещество начинает протекать через расходомер, кориолисовы силы вынуждают каждую точку вдоль трубы(труб) иметь различную фазу. Например, фаза на впускном конце расходомера отстает от фазы в централизованной позиции возбуждающего устройства, в то время как фаза на выпуске опережает фазу в централизованной позиции возбуждающего устройства. Тензодатчики на трубе(ах) формируют синусоидальные сигналы, характерные для движения трубы(труб). Сигналы, выводимые из тензодатчиков, обрабатываются, чтобы определять временную задержку между тензодатчиками. Временная задержка между двумя или более тензодатчиками пропорциональна массовому расходу вещества, протекающего через трубу(ы).
Измерительный электронный прибор, присоединенный к возбуждающему устройству, формирует возбуждающий сигнал, чтобы приводить в действие возбуждающее устройство и определять массовый расход и другие свойства вещества из сигналов, принимаемых от тензодатчиков. Возбуждающее устройство может содержать одну из многих хорошо известных компоновок; однако магнит и встречновключенная катушка возбуждения успешно применяются в отрасли расходомеров. Переменный ток передается катушке возбуждения для вибрации трубы(труб) с желаемой амплитудой и частотой расходомерной трубы. Также в области техники известно предоставление тензодатчиков в качестве компоновки магнита и катушки, очень похожей на конфигурацию возбуждающего устройства. Однако в то время как возбуждающее устройство получает ток, который индуцирует перемещение, тензодатчики могут использовать перемещение, обеспечиваемое возбуждающим устройством, чтобы индуцировать напряжение. Величина временной задержки, измеренной тензодатчиками, является очень маленькой; зачастую измеряется в наносекундах. Следовательно, необходимо, чтобы выход датчика был очень точным.
В целом, расходомер Кориолиса может быть первоначально откалиброван, и коэффициент калибровки расхода вместе с корректированием нуля может быть создан. При эксплуатации коэффициент калибровки расхода (FCF) может быть умножен на временную задержку, измеренную посредством тензодатчиков (ΔT), минус корректирование нуля (ΔT0), чтобы формировать массовый расход. Такие калибровки массового расхода могут быть представленными двумя калибровочными постоянными, которые эквивалентны наклону (FCF) и отсечению (корректирование нуля) прямой линии. Пример уравнения массового расхода, использующего коэффициент калибровки расхода (FCF) и корректирование нуля (ΔT0), описывается посредством Уравнения (1):

где 
FCF=коэффициент калибровки расхода;
ΔTmeasured=измеренная временная задержка;
ΔT0=первоначальное корректирование нуля.
В большинстве ситуаций расходомер первоначально калибруется, типично производителем, и предполагается, что он обеспечивает точные измерения без последующих требуемых калибровок. Хотя первоначально определенное корректирование нуля может адекватно корректировать измерения в ограниченных обстоятельствах, множество условий эксплуатации может влиять на корректирование нуля. Такие условия эксплуатации включают в себя давление, плотность жидкости, условия установки датчика и т.д. Один подход предшествующего уровня техники к калибровке расходомера подразумевает прекращение пользователем потока к расходомеру, чтобы обеспечивать измерительный прибор контрольным нулевым расходом в условиях процесса, в такой момент пользователь может инициировать процедуру калибровки нуля, которая определяет корректирование нуля для использования измерительным электронным прибором. Это может называться "обнулением по нажатию кнопки". Здесь, измерительный прибор калибруется в двух точках: 0% и 100% полной шкалы, где значение 0% задается посредством процедуры обнуления по нажатию кнопки. Однако использование подхода обнуления по нажатию кнопки может приводить в результате к нелинейностям на некоторых измерительных приборах. Подход обнуления по нажатию кнопки также приводит в результате к ошибкам до 1% при низких величинах расхода, что является неприемлемо высоким.
Поскольку кориолисовы измерители могут иметь небольшие нелинейности, которые вызывают ошибки при низких расходах, подход обнуления по нажатию кнопки может не всегда быть оптимальным решением калибровки. Тщательная регулировка постоянных наклона и отсечения с помощью "двухступенчатого обнуления", однако, приводит в результате к калибровочным данным, которые обычно лучше ±0,10%. Калибровка двухступенчатым обнулением просто использует расход больше 0%, типично 10%, вместе с более высокой точкой расхода, типично 100%, чтобы устанавливать две постоянные - наклон и отсечение. К сожалению, способ калибровки с двухступенчатым обнулением приводит в результате к указанию ненулевого расхода в условиях без расхода, которое зачастую находится за пределами спецификации значения устойчивости нуля изделия. Следовательно, ни один способ калибровки не является идеальным во всех ситуациях.
Следовательно, существует необходимость в уровне техники в устройстве и способе, чтобы предоставлять возможность выполнения калибровки с двухступенчатым обнулением, в то же время также предоставляя возможность выполнения стандартного обнуления по нажатию кнопки.
Настоящее изобретение преодолевает вышеупомянутые трудности и другие проблемы, и достигается прогресс в уровне техники.
Сущность изобретения
Способ эксплуатации расходомера предоставляется согласно варианту осуществления. Вариант осуществления содержит следующие этапы: измерение расхода текучей среды в расходомере; определение, по меньшей мере, одной характеристики текучей среды; определение предпочтительного алгоритма из множества алгоритмов на основе расхода текучей среды и, по меньшей мере, одной характеристики текучей среды; и применение предпочтительного алгоритма к рабочей процедуре, чтобы определять массовый расход.
Расходомер, выполненный с возможностью измерять расход и плотность текучей среды внутри него, предоставляется согласно варианту осуществления. Вариант осуществления содержит измерительный электронный прибор, имеющий систему обработки и систему хранения. Также предусматривается множество тензодатчиков, прикрепленных к трубам расходомера на связи с измерительным электронным прибором. Дополнительно, возбуждающее устройство прикрепляется к трубам расходомера на связи с измерительным электронным прибором, при этом измерительный электронный прибор выполнен с возможностью измерять расход технологической среды в узле датчика и определять, по меньшей мере, одну характеристику текучей среды для технологической среды. Наконец, измерительный электронный прибор выполнен с возможностью определять предпочтительный алгоритм из множества алгоритмов на основе расхода текучей среды и, по меньшей мере, одной характеристики текучей среды и применять предпочтительный алгоритм к рабочей процедуре.
Аспекты
Согласно аспекту предоставляется способ эксплуатации расходомера. Аспект содержит этапы: измерения расхода текучей среды в расходомере; определение, по меньшей мере, одной характеристики текучей среды; определение предпочтительного алгоритма из множества алгоритмов на основе расхода текучей среды и, по меньшей мере, одной характеристики текучей среды; и применение предпочтительного алгоритма к рабочей процедуре, чтобы определять массовый расход.
Предпочтительно, этап определения, по меньшей мере, одной характеристики текучей среды содержит этап определения плотности текучей среды.
Предпочтительно, этап определения плотности текучей среды содержит этапы: измерения плотности текучей среды; определения того, ниже ли плотность текучей среды предварительно определенного порогового значения; и определение того, выше ли плотность текучей среды предварительно определенного порогового значения.
Предпочтительно, предварительно определенное пороговое значение равно 800 кг/м3.
Предпочтительно, этап определения, по меньшей мере, одной характеристики текучей среды содержит этап определения температуры текучей среды.
Предпочтительно, способ содержит этап определения того, присутствует ли посткалибровочная компенсация.
Предпочтительно, множество алгоритмов содержит, по меньшей мере, первый алгоритм и второй алгоритм, при этом первый алгоритм содержит процедуру обнуления по нажатию кнопки, а второй алгоритм содержит процедуру двухступенчатого обнуления.
Предпочтительно, массовый расход определяется с помощью уравнения, содержащего:
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
при этом процедура обнуления по нажатию кнопки содержит определение первоначального корректирования нуля посредством прекращения потока к расходомеру, чтобы обеспечивать условие нулевого расхода, и инициирования процедуры калибровки нуля, чтобы определять первоначальное корректирование нуля в качестве расхода, измеренного во время условия нулевого расхода.
Предпочтительно, массовый расход определяется с помощью уравнения:
 , в котором:
, в котором:
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
ΔT03 - двухступенчатое корректирование; и
при этом процедура двухступенчатого обнуления содержит определение двухступенчатого корректирования посредством вычитания двухступенчатой временной задержки из корректирования нуля, при этом двухступенчатая временная задержка является значением расхода, измеренным во время состояния ненулевого расхода.
Предпочтительно, предпочтительный алгоритм содержит первый алгоритм, когда расход текучей среды в расходомере меньше значения отсечки низкого расхода.
Предпочтительно, значение отсечки низкого расхода находится между 40 нс и 1000 нс.
Предпочтительно, значение отсечки низкого расхода содержит пользовательские входные данные, диктующие значение отсечки низкого расхода.
Предпочтительно, предпочтительный алгоритм содержит первый алгоритм, когда плотность текучей среды в расходомере ниже предварительно определенного порогового значения.
Предпочтительно, предпочтительный алгоритм содержит первый алгоритм, когда присутствует посткалибровочная компенсация.
Предпочтительно, предпочтительный алгоритм содержит второй алгоритм, когда расход текучей среды в расходомере больше значения отсечки низкого расхода, плотность текучей среды в расходомере выше предварительно определенного порогового значения, и посткалибровочная компенсация отсутствует.
Согласно аспекту предоставляется расходомер, сконфигурированный, чтобы измерять расход и плотность текучей среды в нем. Аспект содержит: измерительный электронный прибор, содержащий систему обработки и систему хранения; множество тензодатчиков, прикрепленных к трубам расходомера на связи с измерительным электронным прибором; возбуждающее устройство, прикрепленное к трубам расходомера на связи с измерительным электронным прибором, при этом измерительный электронный прибор конфигурируется, чтобы измерять расход текучей среды для технологической среды в узле датчика и определять, по меньшей мере, одну характеристику текучей среды для технологической среды, и при этом измерительный электронный прибор конфигурируется, чтобы определять предпочтительный алгоритм из множества алгоритмов на основе расхода текучей среды и, по меньшей мере, одной характеристики текучей среды и применять предпочтительный алгоритм к рабочей процедуре.
Предпочтительно, по меньшей мере, одна характеристика текучей среды содержит фазу текучей среды.
Предпочтительно, по меньшей мере, одна характеристика текучей среды содержит плотность текучей среды, и измерительный электронный прибор конфигурируется, чтобы определять, что текучая среда является газом, если плотность ниже предварительно определенного порогового значения, и конфигурируется, чтобы определять, что текучая среда является жидкостью, если плотность выше предварительно определенного порогового значения.
Предпочтительно, предварительно определенное пороговое значение равно 800 кг/м3.
Предпочтительно, множество алгоритмов содержит, по меньшей мере, первый алгоритм и второй алгоритм, при этом первый алгоритм содержит процедуру обнуления по нажатию кнопки, а второй алгоритм содержит процедуру двухступенчатого обнуления.
Предпочтительно, алгоритм массового расхода содержит уравнение:
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
при этом процедура обнуления по нажатию кнопки содержит первоначальное корректирование нуля, определенное как расход, измеренный в то время, когда расходомер испытывает условие нулевого расхода.
Предпочтительно, алгоритм массового расхода содержит уравнение:
, в котором:
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
ΔT03 - двухступенчатое корректирование;
при этом процедура двухступенчатого корректирования содержит определение двухступенчатого корректирования посредством вычитания двухступенчатой временной задержки из корректирования нуля, при этом двухступенчатая временная задержка является значением расхода, измеренным во время условия ненулевого расхода.
Предпочтительно, предпочтительный алгоритм содержит первый алгоритм, когда расход текучей среды в расходомере меньше значения отсечки низкого расхода.
Предпочтительно, значение отсечки низкого расхода находится между 40 нс и 1000 нс.
Предпочтительно, значение отсечки низкого расхода содержит пользовательские входные данные, диктующие значение отсечки низкого расхода.
Предпочтительно, предпочтительный алгоритм содержит первый алгоритм, когда текучая среда в расходомере является газом.
Предпочтительно, предпочтительный алгоритм содержит первый алгоритм, когда присутствует посткалибровочная компенсация.
Предпочтительно, предпочтительный алгоритм содержит второй алгоритм, когда расход текучей среды в расходомере больше значения отсечки низкого расхода, текучая среда в расходомере является жидкостью, и посткалибровочная компенсация отсутствует.
Краткое описание чертежей
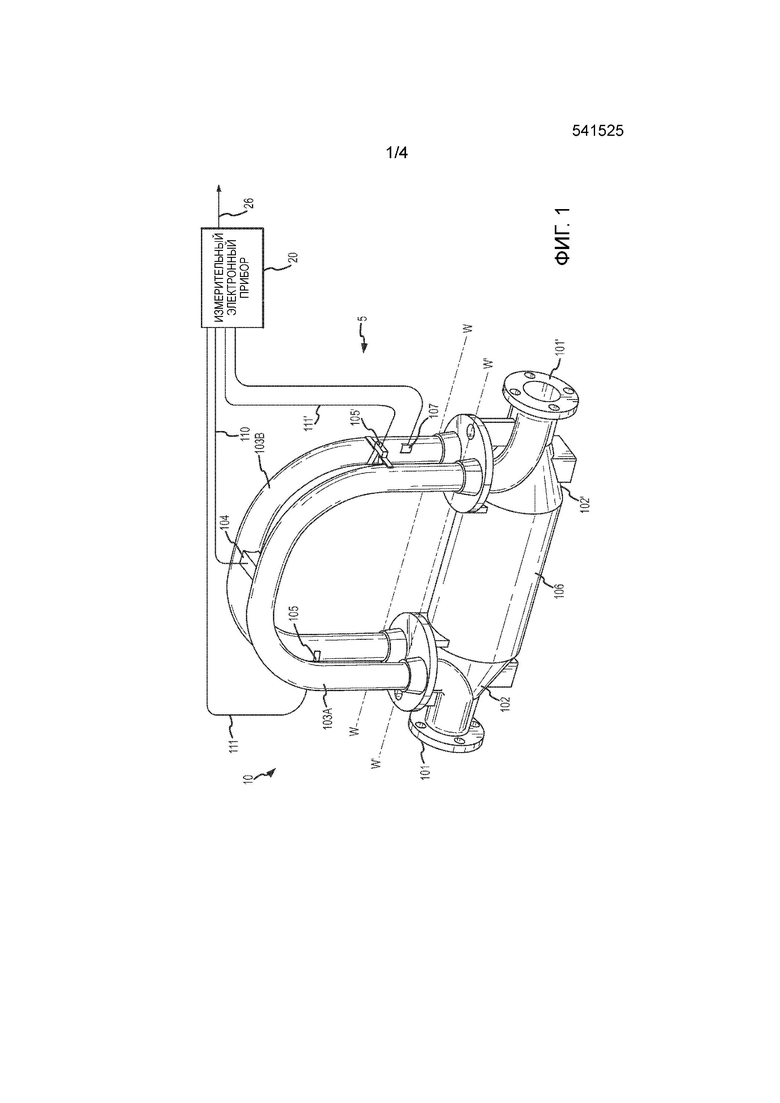
Фиг. 1 показывает узел вибрационного датчика согласно варианту осуществления изобретения.
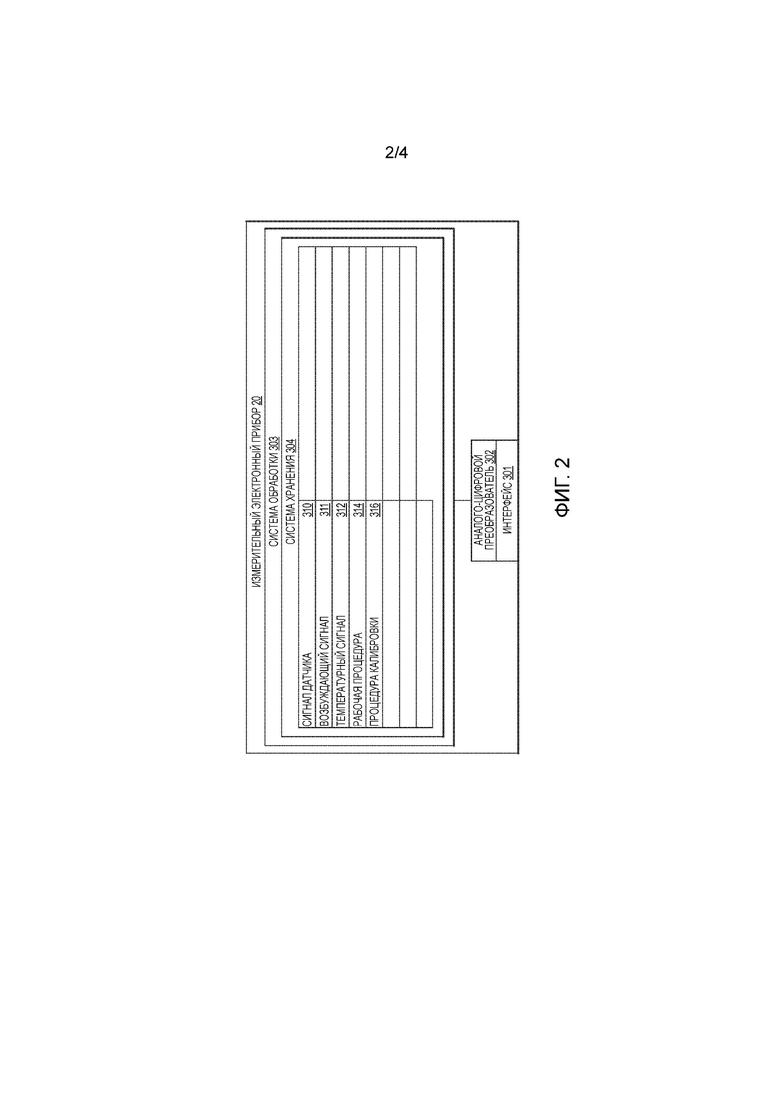
Фиг. 2 показывает измерительный электронный прибор согласно варианту осуществления изобретения.
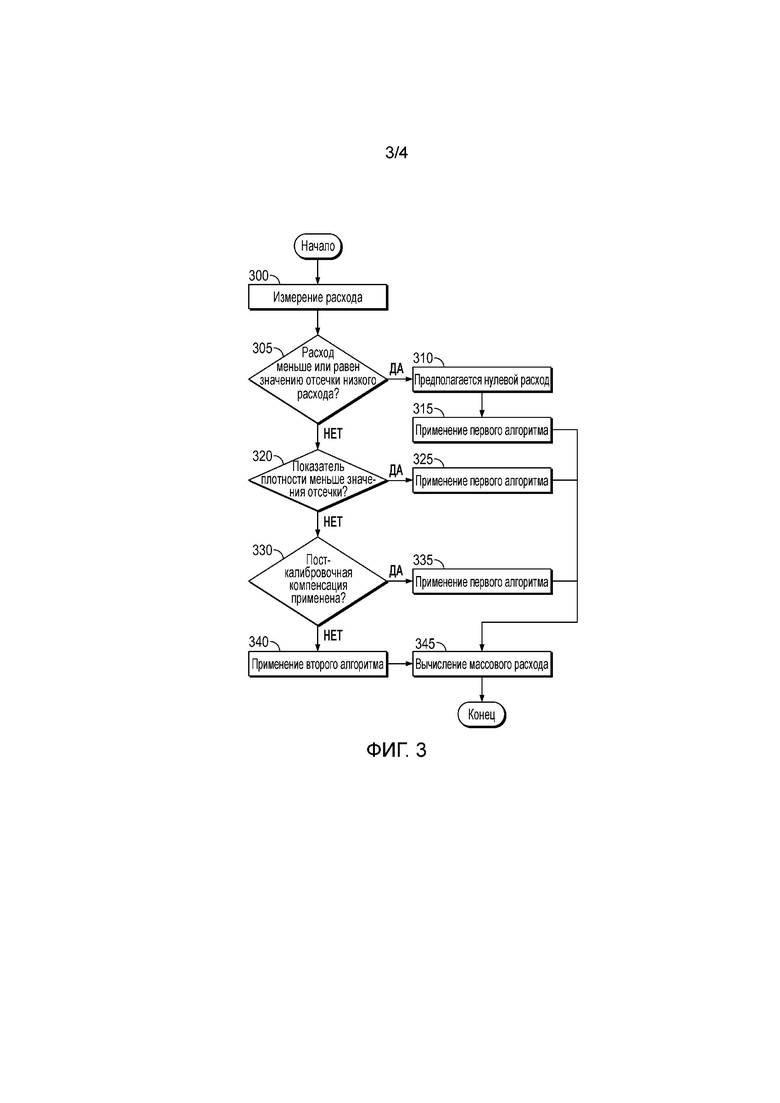
Фиг. 3 - это блок-схема последовательности операций, описывающая фрагмент процедуры калибровки согласно варианту осуществления изобретения.
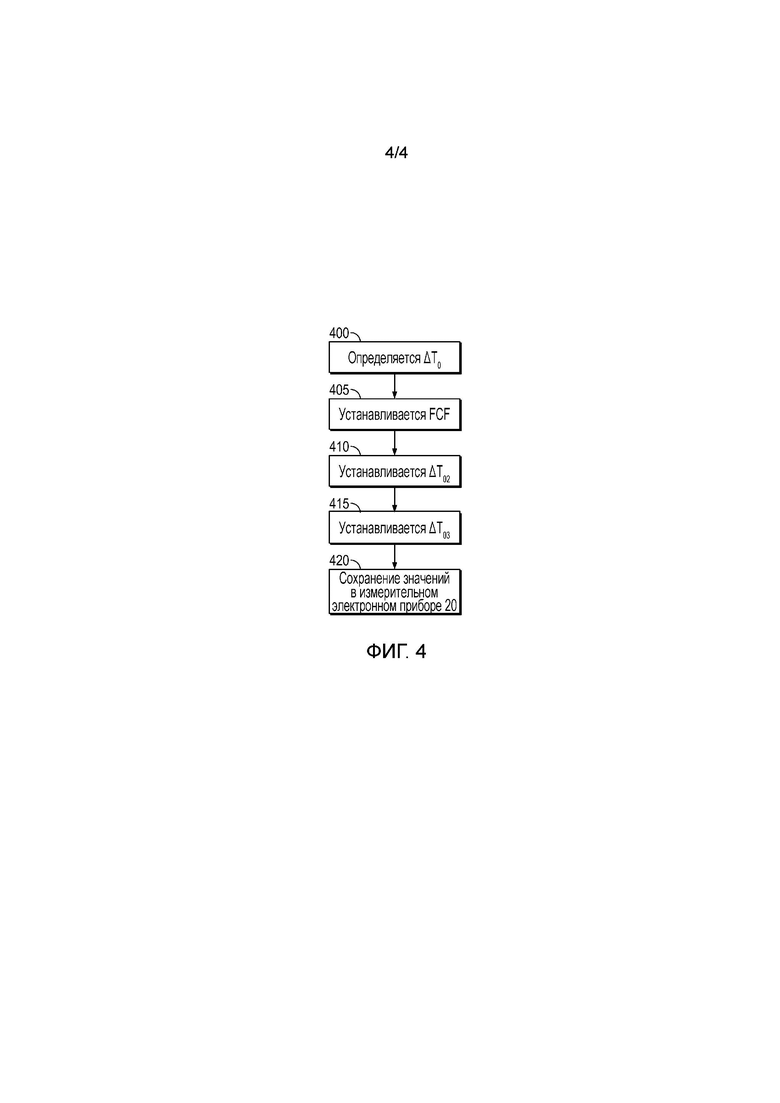
Фиг. 4 - это блок-схема последовательности операций первоначальной настройки расходомера согласно варианту осуществления изобретения.
Подробное описание изобретения
Фиг. 1-4 и последующее описание описывают конкретные примеры для изучения специалистами в области техники того, как создать и использовать лучший вариант изобретения. В целях обучения принципам изобретения некоторые традиционные аспекты были упрощены или опущены. Специалистам в области техники будут понятны разновидности этих примеров, которые попадают в рамки изобретения, и будет понятно, что отличительные признаки, описанные ниже, могут быть объединены различными способами, чтобы формировать множество разновидностей изобретения. В результате, изобретение не ограничивается конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
Фиг. 1 иллюстрирует пример расходомера 5 в форме расходомера Кориолиса, содержащего узел 10 датчика и один или более измерительных электронных приборов 20. Один или более измерительных электронных приборов 20 соединяются с узлом 10 датчика, чтобы измерять характеристику текучего вещества, такую как, например, плотность, массовый расход, объемный расход, суммарный массовый расход, температуру и другую информацию.
Узел 10 датчика включает в себя пару фланцев 101 и 101', коллекторов 102 и 102' и труб 103A и 103B. Коллекторы 102, 102' прикрепляются к противоположным концам труб 103A, 103B. Фланцы 101 и 101' из настоящего примера прикрепляются к коллекторам 102 и 102'. Коллекторы 102 и 102' из настоящего примера прикрепляются к противоположным концам разделителя 106. Разделитель 106 поддерживает промежуток между коллекторами 102 и 102' в настоящем примере, чтобы предотвращать нежелательные вибрации в трубах 103A и 103B. Трубы 103A и 103B протягиваются наружу от коллекторов 102 и 102' практически параллельным образом. Когда узел 10 датчика вставляется в трубопроводную систему (не показана), которая переносит текучее вещество, вещество поступает в узел 10 датчика через фланец 101, проходит через впускной коллектор 102, где общий объем вещества направляется, чтобы поступать в трубы 103A и 103B, протекает через трубы 103A и 103B и обратно в выпускной коллектор 102', где оно выходит из узла 10 датчика через фланец 101'.
Узел 10 датчика включает в себя возбуждающее устройство 104. Возбуждающее устройство 104 прикрепляется к трубам 103A и 103B в позиции, где возбуждающее устройство 104 может колебать трубы 103A, 103B в режиме возбуждения. Более конкретно, возбуждающее устройство 104 включает в себя первый компонент возбуждающего устройства (не показан), прикрепленный к трубе 103A, и второй компонент возбуждающего устройства (не показан), прикрепленный к трубе 103B. Возбуждающее устройство 104 может содержать одну из многих хорошо известных компоновок, таких как магнит, установленный на трубе 103A, и встречновключенная катушка, установленная на трубе 103B.
В настоящем примере режим возбуждения является первым из режима изгибания фазы, и трубы 103A и 103B предпочтительно выбираются и соответствующим образом устанавливаются на впускной коллектор 102 и выпускной коллектор 102' с тем, чтобы предоставлять сбалансированную систему, имеющую практически одинаковое распределение массы, моменты инерции и модули упругости относительно осей изгибания W-W и W-W', соответственно. В настоящем примере, когда режим возбуждения является первым из режимов изгибания фаз, трубы 103A и 103B возбуждаются возбуждающим устройством 104 в противоположных направлениях относительно их соответствующих осей изгибания W-W и W-W'. Возбуждающий сигнал в форме переменного тока, может быть предоставлен посредством одного или более измерительных электронных приборов 20, так, как, например, через провод 110, и проходить через катушку, чтобы вынуждать обе трубы 103A, 103B колебаться. Обычные специалисты в области техники поймут, что другие режимы возбуждения могут быть использованы в рамках настоящего изобретения.
Показанный узел 10 датчика включает в себя пару тензодатчиков 105, 105', которые прикрепляются к трубам 103A, 103B. Более конкретно, первый компонент тензодатчика (не показан) располагается на трубе 103A, а второй компонент тензодатчика (не показан) располагается на трубе 103B. В изображенном варианте осуществления тензодатчики 105, 105' могут быть электромагнитными датчиками, например, тензочувствительными магнитами и тензочувствительными катушками, которые создают сигналы тензодатчиков, которые представляют скорость и позицию труб 103A, 103B. Например, тензодатчики 105, 105' могут подавать сигналы тензодатчиков одному или более измерительным электронным приборам по каналам 111, 111'. Обычные специалисты в области техники поймут, что движение труб 103A, 103B является пропорциональным некоторым характеристикам текучего вещества, например, массовому расходу и плотности вещества, протекающего через трубы 103A, 103B.
Должно быть понятно, что, в то время как узел 10 датчика, описанный выше, содержит расходомер с двумя проточными трубами, целесообразно в рамках настоящего изобретения реализовать расходомер с одной трубой. Кроме того, в то время как расходомерные трубы 103A, 103B показаны как содержащие изогнутую конфигурацию расходомерной трубы, настоящее изобретение может быть реализовано с помощью расходомера, содержащего прямую конфигурацию расходомерной трубы. Следовательно, конкретный вариант осуществления узла 10 датчика, описанный выше, является просто одним примером и не должен никоим образом ограничивать рамки настоящего изобретения.
В примере, показанном на фиг. 1, один или более измерительных электронных приборов 20 принимают сигналы тензодатчиков от тензодатчиков 105, 105' Канал 26 предоставляет средство ввода и вывода, которое предоставляет возможность одному или более измерительным электронным приборам 20 взаимодействовать с оператором. Один или более измерительных электронных приборов 20 измеряют характеристику текучего вещества, такую как, например, разность фаз, частота, временная задержка, плотность, массовый расход, объемный расход, суммарный массовый расход, температура, проверка измерительного прибора и другая информация. Более конкретно, один или более измерительных электронных приборов 20 принимают один или более сигналов, например, от тензодатчиков 105, 105' и одного или более температурных датчиков 107, таких как температурный датчик сопротивления (RTD), и используют эту информацию, чтобы измерять характеристику текучего вещества.
Технические приемы, посредством которых узлы вибрационных датчиков, такие как, например, расходомеры Кориолиса или плотномеры, измеряют характеристику текучего вещества, хорошо понятны; следовательно, подробное обсуждение опускается ради краткости этого описания.
Как обсуждалось кратко выше, одной проблемой, ассоциированной с узлами датчиков, такими как расходомеры Кориолиса, является присутствие корректирования нуля, которое является измеренной временной задержкой тензометров 105, 105' при нулевом расходе текучей среды. Если корректирование нуля не принимается во внимание при вычислении расхода и различных других измерениях потока, измерения потока типично будут включать в себя погрешность. Как отмечено, типичным подходом предшествующего уровня техники, чтобы компенсировать корректирование нуля, является измерение первоначального корректирования нуля (Δt0) во время первоначального процесса калибровки, который обычно подразумевает закрытие вентилей и обеспечение исходного условия нулевого расхода. Такие процессы калибровки, в целом, известны в области техники, и подробное обсуждение опускается для краткости описания. После того как первоначальное корректирование нуля определено, измерения потока корректируются, во время эксплуатации измерительного прибора, посредством вычитания первоначального корректирования нуля из измеренной временной разницы согласно Уравнению(1). Должно быть понятно, что Уравнение (1) предоставляется просто в качестве примера, и не должно никоим образом ограничивать рамки настоящего изобретения, поскольку другие способы и/или уравнения рассматриваются. Хотя Уравнение (1) предоставляется, чтобы вычислять массовый расход, должно также быть понятно, что на различные другие измерения потока может влиять корректирование нуля, и, следовательно, они могут также быть скорректированы. Этот подход может предоставлять удовлетворительные результаты в ситуациях, когда условия эксплуатации практически такие же, что и условия, присутствующие во время первоначальной калибровки и определения корректирования нуля (Δt0). Во многих обстоятельствах, однако, условия эксплуатации во время использования значительно отличаются от условий эксплуатации, присутствующих во время калибровки.
Традиционно рекомендовалось, чтобы пользователи расходомера проверяли нулевое показание при нулевом расходе и обнуляли при необходимости. Однако если пользователь выполняет эту процедуру, обнуление измерительного прибора отменяет какую-либо калибровку с двухступенчатым обнулением, которая могла быть использована. Для того, чтобы использовать способ калибровки с двухступенчатым обнулением и предоставлять возможность пользователю повторно обнулять, когда необходимо, вариант осуществления изобретения предоставляет логику для измерительного электронного прибора массового расходомера. В устройствах предшествующего уровня техники массовый расход сообщается независимо от рабочей среды (газа в сравнении с жидкостью, например) или рабочего диапазона (низкий расход в сравнении с высоким расходом). В варианте осуществления, посредством применения более сложной, основанной на решении модели, реализуется точная характеристика измерительного прибора, в то же время предоставляя возможность стандартного обнуления измерительного прибора. Это обеспечивает выходной сигнал измерительного прибора, который точно сообщает нулевые показатели без потока, в то же время также предоставляя точные низкие показатели расхода.
Фиг. 2 показывает измерительный электронный прибор 20 согласно варианту осуществления изобретения. Измерительный электронный прибор 20 может включать в себя интерфейс 301 и систему 303 обработки. Система 303 обработки может включать в себя систему 304 хранения. Система 304 хранения может содержать внутреннюю память и/или может содержать внешнюю память. Измерительный электронный прибор 20 может формировать сигнал 311 возбуждения и подавать сигнал 311 возбуждения к возбуждающему устройству 104. Кроме того, измерительный электронный прибор 20 может принимать сигналы 310 датчиков от тензодатчиков 105, 105', такие как сигналы тензодатчика/датчика скорости, сигналы деформации, оптические сигналы или любые другие сигналы, известные в области техники. В некоторых вариантах осуществления сигналы 310 датчика могут быть приняты от возбуждающего устройства 104. Измерительный электронный прибор 20 может работать в качестве плотномера или может работать в качестве массового расходомера, включая в себя работу в качестве расходомера Кориолиса. Должно быть понятно, что измерительный электронный прибор 20 может также работать как некоторый другой тип узла вибрационного датчика, и конкретные предоставленные примеры не должны ограничивать рамки настоящего изобретения. Измерительный электронный прибор 20 может обрабатывать сигналы 310 датчиков для того, чтобы получать характеристики расхода вещества, протекающего через расходомерные трубы 103A, 103B. В некоторых вариантах осуществления измерительный электронный прибор 20 может принимать температурный сигнал 312 от одного или более чувствительных элементов температурных датчиков сопротивления (RTD) или температурных датчиков 107, например.
Интерфейс 301 может принимать сигналы 310 датчиков от возбуждающего устройства 104 или тензодатчиков 105, 105', через провода 110, 111, 111'. Интерфейс 301 может выполнять любое необходимое или желательное предварительное формирование сигнала, такое как любой способ форматирования, усиления, буферизации и т.д. Альтернативно, некоторое или все предварительное формирование сигнала может выполняться в системе 303 обработки. Кроме того, интерфейс 301 может разрешать связи между измерительным электронным прибором 20 и внешними устройствами. Интерфейс 301 может быть способен к любому способу электронной, оптической или беспроводной связи.
Интерфейс 301 в одном варианте осуществления может включать в себя аналого-цифровой преобразователь 302, в котором сигнал датчика содержит аналоговый сигнал датчика. Аналого-цифровой преобразователь 302 может дискретизировать и оцифровывать аналоговый сигнал датчика и создавать цифровой сигнал датчика. Аналого-цифровой преобразователь 302 может также выполнять любое необходимое разрежение данных, в котором цифровой сигнал датчика подвергается децимации для того, чтобы уменьшать объем необходимой обработки сигнала и уменьшать время обработки.
Система 303 обработки может проводить операции измерительного электронного прибора 20 и обрабатывать показания расхода от узла 10 датчика. Система 303 обработки может исполнять одну или более процедур обработки, таких как общая рабочая процедура 314 и процедура 316 калибровки, и тем самым обрабатывать входные данные для того, чтобы создавать один или более показателей расхода, которые являются точными в широком многообразии условий.
В качестве примера обзора варианта осуществления процедуры 316 калибровки, система может быть откалибрована с помощью заводского нулевого значения в условиях без расхода. Пользователь, в любое время, может дополнительно, и необязательно, выполнять обнуление по нажатию кнопки. Эти различные нулевые значения сохраняются в системе 304 хранения. Как часть рабочей процедуры 314, измерительный электронный прибор 20 может формировать и сохранять значения, ассоциированные с функциями процесса, такие как расход технологического материала, плотность технологического материала, также как любые указанные пользователем настройки, такие как какая-либо посткалибровочная компенсация, например, без ограничения.
Измерительный электронный прибор 20 вводит/измеряет сохраненные значения/константы, пользовательские настройки, сохраненные таблицы и т.д., которые могут быть использованы процедурой 316 калибровки. Процедура 316 калибровки наблюдает за условиями расходомера 5 и применяет алгоритм калибровки, считающийся наиболее подходящим для условий. Условия могут включать в себя введенные пользователем условия, например, без ограничения. Условия могут также включать в себя любую комбинацию температуры, плотности текучей среды, расхода, спецификаций измерительного прибора, вязкости, числа Рейнольдса, посткалибровочной компенсации и т.д. Может быть любое число алгоритмов, применяемых в качестве процедуры 316 калибровки. В одном варианте осуществления первый алгоритм содержит обнуление по нажатию кнопки, а второй алгоритм содержит калибровку с двухступенчатым обнулением. Они являются просто примерами алгоритмов, и другие алгоритмы рассматриваются. В этом примере рассматриваются два алгоритма, но рассматриваются поисковые таблицы различных алгоритмов, и наиболее подходящий алгоритм на основе условий может быть применен при необходимости. Дополнительно, помимо различающихся алгоритмов, различные константы, такие как коэффициент калибровки расхода (FCF), например, без ограничения, могут быть применены к выбранному алгоритму на основе условий эксплуатации или пользовательского предпочтения.
Система 303 обработки может содержать компьютер общего назначения, микропроцессорную систему, логическую схему или некоторое другое универсальное или специализированное процессорное устройство. Система 303 обработки может быть распределена между множеством устройств обработки. Система 303 обработки может включать в себя любой вид встроенного или независимого электронного носителя хранения, такого как система 304 хранения.
Система 303 обработки обрабатывает сигнал 310 датчика для того, чтобы формировать сигнал возбуждения, среди прочего. Сигнал возбуждения подается к возбуждающему устройству 104 через провод 110 для того, чтобы колебать ассоциативно связанную расходомерную трубу(ы), такую как расходомерные трубы 103A, 103B на фиг. 1.
Должно быть понятно, что измерительный электронный прибор 20 может включать в себя различные другие компоненты и функции, которые, в целом, известны в области техники. Эти дополнительные признаки опущены из описания и чертежей в целях краткости. Следовательно, настоящее изобретение не должно ограничиваться конкретными показанными и обсужденными вариантами осуществления.
Фиг. 3 - это блок-схема последовательности операций, которая иллюстрирует вариант осуществления фрагмента рабочей процедуры 314 согласно варианту осуществления. Этот фрагмент рабочей процедуры 314 помогает в определении того, какая процедура обнуления используется в определении массового расхода. На этапе 300 измеряется расход текучей среды в расходомерных трубах 103A, 103B. Если расход ниже значения отсечки низкого расхода, которое определяется на этапе 305, условие нулевого расхода предполагается на этапе 310. Если случится так, первый алгоритм применяется на этапе 315. Расход меньше или равный этому значению отсечки низкого расхода обрабатывается измерительным электронным прибором 20 как условие нулевого расхода.
Например, в варианте осуществления, если значение отсечки низкого расхода определяется как 1 мкс, и расход меньше или равен 1 мкс, предполагается условие нулевого расхода. В еще одном варианте осуществления значение отсечки низкого расхода может быть определено как процентное значение от максимального расхода. В еще одном варианте осуществления пользователь может прекращать поток к расходомеру 5, чтобы обеспечивать расходомеру контрольное условие нулевого расхода, в этот момент пользователь может инициировать процедуру калибровки нуля, которая является просто "обнулением по нажатию кнопки", как ранее описано.
Если текучая среда определяется протекающей через расходомер 5, тогда этап 305 переходит к этапу 320, на котором определяется, находится ли текучая среда выше или ниже значения отсечки плотности. Если текучая среда определяется как находящаяся ниже отсечки плотности, первый алгоритм применяется на этапе 325. Если, с другой стороны, текучая среда определяется как находящаяся выше отсечки плотности, тогда этап 320 переходит к этапу 330. В варианте осуществления значение отсечки плотности равно 800 кг/м3. Это только пример, и значение отсечки может быть больше или меньше 800 кг/м3. В варианте осуществления пользователь может вводить плотность текучей среды. В другом варианте осуществления температура жидкости измеряется, и предварительно определенная отсечка плотности регулируется выше или ниже на основе измеренной температуры. В еще одном варианте осуществления измеряется давление текучей среды, и предварительно определенная отсечка плотности регулируется выше или ниже на основе измеренного давления. Поисковая таблица с измерительным электронным прибором 20 может хранить значения температуры, давления и плотности, так что подходящее пороговое значение отсечки плотности применяется для процедуры 316 калибровки на основе условий процесса.
На этапе 330 опционально определяется, применяется ли посткалибровочная компенсация к вычислениям измерительного прибора. Например, без ограничения, текучие среды с более высокими плотностями могут нуждаться в дополнительных коэффициентах компенсации, применяемых во время рабочей процедуры 314. В другом варианте осуществления посткалибровочная компенсация содержит иной FCF. Поскольку не все алгоритмы компенсации калибровки будут давать точные результаты, когда спарены с конкретными посткалибровочными компенсациями, полезно принимать это во внимание. Например, измерительный прибор, испытывающий поток технологической среды, имеющей высокую плотность, может давать более точные показания расхода, если применяется алгоритм компенсации V/ρ. После того как соответствующий алгоритм применяется к рабочей процедуре 314, как на этапах 315, 325, 335 или 340, массовый расход вычисляется на этапе 345.
Фиг. 4 иллюстрирует блок-схему последовательности операций, которая описывает вариант осуществления первоначальной настройки расходомера 5. Согласно варианту осуществления изобретения корректирование нуля может содержать первоначально определенное на производстве корректирование нуля. Согласно другому варианту осуществления изобретения корректирование нуля может содержать определенное впоследствии корректирование нуля. Определенное впоследствии корректирование нуля может быть отличным от первоначального определенного корректирования нуля. Это может происходить, особенно в ситуациях, когда условия эксплуатации отличаются от условий эксплуатации, когда было определено первоначальное корректирование нуля, например. Впоследствии определяемые корректирования нуля, такие как процесс обнуления по нажатию кнопки, могут быть записаны пользователями, когда необходимость возникает вследствие изменения условий эксплуатации.
На этапе 400 определяется первоначальное корректирование нуля (ΔT0), которое может проводиться как часть первоначальной заводской настройки. Для конкретного, первоначально настраиваемого расходомера 5 это влечет за собой размещение расходомера 5 в условиях нулевого расхода и считывание измеренного расхода. Разница между нулевым и измеренным расходом сохраняется в системе 304 хранения в качестве первоначального корректирования нуля (ΔT0). После того как первоначальное корректирование нуля (ΔT0) определяется на этапе 400, устанавливается коэффициент калибровки расхода (FCF), который, как отмечено ранее, является наклоном линии, которая указывает соотношение между измеренной временной задержкой (Δtmeasured) и массовым расходом (
 (2)
(2)
где ΔT02=двухступенчатая временная задержка;
ΔT03=двухступенчатое корректирование;
ΔT0=первоначальное корректирование нуля.
Уравнение (2) предоставляется только в качестве примера, поскольку другие уравнения рассматриваются для вычисления двухступенчатого корректирования (ΔT03).
Первоначальное корректирование нуля (ΔT0), коэффициент калибровки расхода (FCF), двухступенчатая временная задержка (ΔT02) и двухступенчатое корректирование (ΔT03) сохраняются в измерительном электронном приборе 20 на этапе 420. В варианте осуществления измерительный электронный прибор 20 хранит эти значения в системе 304 хранения.
Значения, первоначально полученные как часть первоначальной настройки расходомера 5, применяются в алгоритмах для определения массового расхода. В варианте осуществления первый алгоритм содержит процедуру обнуления по нажатию кнопки. Вычисления массового расхода могут использовать первоначальное корректирование нуля (ΔT0), полученное посредством процедуры обнуления по нажатию кнопки или заводской калибровки, например, и могут быть вычислены согласно Уравнению (1). В варианте осуществления второй алгоритм содержит процедуру двухступенчатого обнуления, и массовый расход может быть вычислен согласно Уравнению (3):
(3)
где
FCF=коэффициент калибровки расхода;
ΔTmeasured=измеренная временная задержка;
ΔT0=первоначальное корректирование нуля;
ΔT03=двухступенчатое корректирование.
В варианте осуществления измерительный электронный прибор 20 оптимизирует калибровку на основе условий, испытываемых расходомером 5. Например, если обнаруживается условие нулевого расхода, тогда первый алгоритм применяется к рабочей процедуре 314. Это обеспечивает оптимальную точность нулевого расхода, и устойчивость нуля сохраняется в пределах эксплуатационных характеристик расходомера 5. Должно быть отмечено, что если пользователь повторно калибрует расходомер 5 в условиях нулевого расхода, это значение калибровки нуля по нажатию кнопки просто заменяет первоначальное корректирование нуля (ΔT0), полученное на этапе 400 на фиг. 4. Должно также быть понятно, что в варианте осуществления все данные калибровки записываются, так что пользовательская калибровка нуля не на постоянной основе перезаписывает прошлые калибровки нуля. Это предоставляет возможность пользователю возвращаться к ранее сохраненным калибровкам нуля.
Если существует условие ненулевого расхода текучей среды, плотность текучей среды определяется для того, чтобы устанавливать, находится ли технологическая среда ниже отсечки плотности. Поскольку газы типично приводят в результате к низким значениям ΔTmeasured, более точный массовый расход вычисляется с помощью первого алгоритма, который применяется к рабочей процедуре 314. Наоборот, если существует условие ненулевого расхода текучей среды, и плотность текучей среды указывает, что технологическая среда выше отсечки плотности, второй алгоритм может быть применен к рабочей процедуре 314. В варианте осуществления это считается правильным, только если не применяется несовместимая посткалибровочная компенсация, как показано на этапе 330 на фиг. 3. Должно быть отмечено, что если применяется посткалибровочная компенсация, тогда первый алгоритм может быть применен с тем, чтобы сохранять точность. В связанном варианте осуществления, если применяется посткалибровочная компенсация, тогда может быть применен полностью другой алгоритм, который не является первым или вторым алгоритмом.
Должно также быть отмечено, что на основе присутствия или отсутствия условия нулевого расхода, присутствия текучей среды высокой или низкой плотности и присутствия или отсутствия посткалибровочной компенсации или любого другого состояния или настройки расходомера, что иной FCF может быть использован вместо FCF, установленного на этапе 405 на фиг. 4, как описано выше.
Настоящее изобретение, как описано выше, предоставляет различные способы и устройства, чтобы определять и применять переменные алгоритмы обнуления к вибрационному расходомеру, такому как расходомер Кориолиса, в переменных условиях эксплуатации. Хотя различные варианты осуществления, описанные выше, направлены на расходомеры, в частности, расходомеры Кориолиса, должно быть понятно, что настоящее изобретение не должно ограничиваться расходомерами Кориолиса, а скорее способы, описанные в данном документе, могут быть использованы с другими типами расходомеров или других вибрационных датчиков, которые испытывают недостаток некоторых измерительных способностей расходомеров Кориолиса.
Подробные описания вышеупомянутых вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, рассматриваемых изобретателями как находящиеся в рамках изобретения. В действительности, специалисты в области техники поймут, что определенные элементы вышеописанных вариантов осуществления могут по-разному быть объединены или устранены, чтобы создавать дополнительные варианты осуществления, и такие дополнительные варианты осуществления попадают в рамки и учения изобретения. Также обычным специалистам в данной области техники будет очевидно, что вышеописанные варианты осуществления могут быть объединены в целом или частично, чтобы создавать дополнительные варианты осуществления в рамках и учениях изобретения. Соответственно, рамки изобретения должны быть определены из последующей формулы изобретения.
Изобретение относится к расходомерам, а более конкретно к способу и устройству для определения и применения переменных алгоритмов обнуления к вибрационному расходомеру в переменных условиях эксплуатации. Способ эксплуатации расходомера (5) содержит этапы, на которых: измеряют (300) расход текучей среды в расходомере; определяют (320) по меньшей мере одну характеристику текучей среды, причем этап определения по меньшей мере одной характеристики текучей среды содержит этап, на котором определяют плотность текучей среды; определяют предпочтительный алгоритм из множества алгоритмов на основе расхода текучей среды и плотности текучей среды; и применяют (345) предпочтительный алгоритм к рабочей процедуре (314), чтобы определять массовый расход. Технический результат - возможность выполнения калибровки с двухступенчатым обнулением, в то же время также предоставляя возможность выполнения стандартного обнуления по нажатию кнопки. 2 н. и 25 з.п. ф-лы, 4 ил.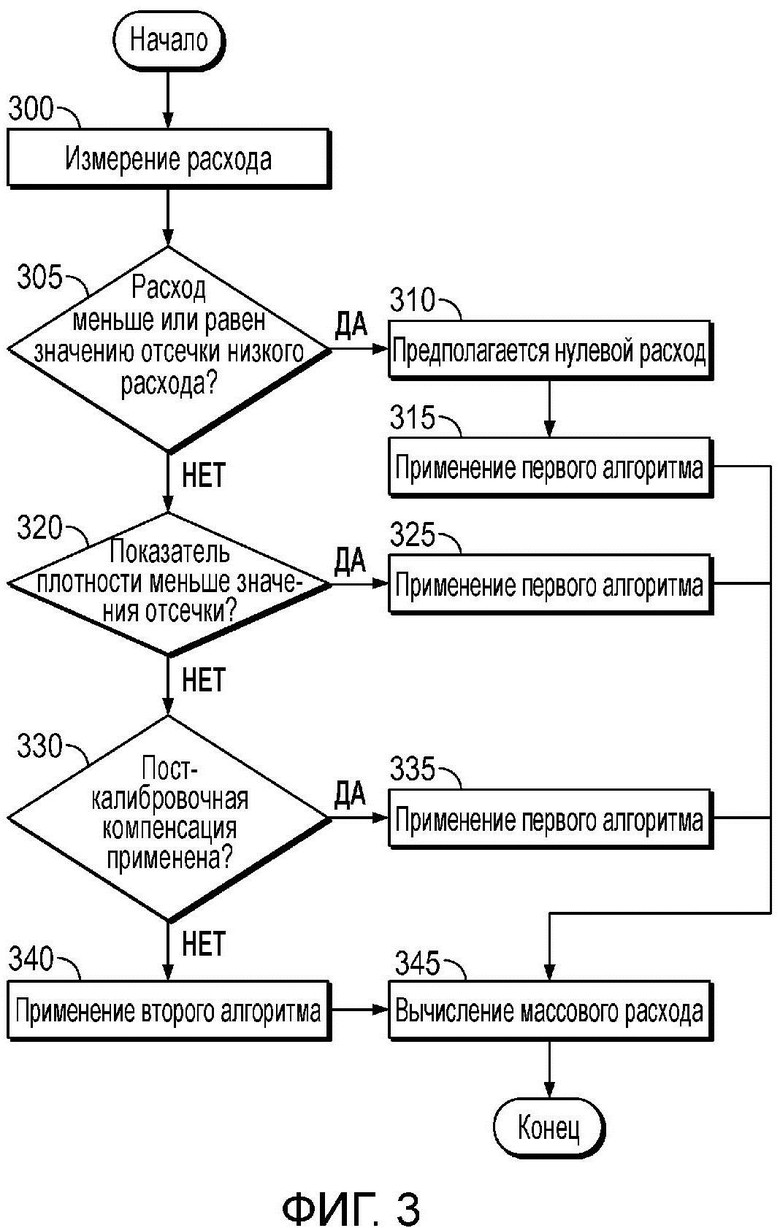
1. Способ эксплуатации расходомера (5), содержащий этапы, на которых:
измеряют (300) расход текучей среды в расходомере;
определяют (320) по меньшей мере одну характеристику текучей среды, причем этап определения по меньшей мере одной характеристики текучей среды содержит этап, на котором определяют плотность текучей среды;
определяют предпочтительный алгоритм из множества алгоритмов на основе расхода текучей среды и плотности текучей среды; и
применяют (345) предпочтительный алгоритм к рабочей процедуре (314), чтобы определять массовый расход.
2. Способ по п. 1, в котором этап определения плотности текучей среды содержит этапы, на которых:
измеряют плотность текучей среды;
определяют, ниже ли плотность текучей среды предварительно определенного порогового значения; и
определяют, выше ли плотность текучей среды предварительно определенного порогового значения.
3. Способ по п. 1, в котором предварительно определенное пороговое значение равно 800 кг/м3.
4. Способ по п. 1, в котором этап определения по меньшей мере одной характеристики текучей среды содержит этап, на котором определяют температуру текучей среды.
5. Способ по п. 1, содержащий этап, на котором определяют, присутствует ли посткалибровочная компенсация.
6. Способ по п. 1, в котором множество алгоритмов содержит по меньшей мере первый алгоритм и второй алгоритм, при этом:
первый алгоритм содержит процедуру обнуления по нажатию кнопки; и
второй алгоритм содержит процедуру двухступенчатого обнуления.
7. Способ по п. 6, в котором массовый расход определяется с помощью уравнения, содержащего: 
 - массовый расход;
- массовый расход;
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
при этом:
процедура обнуления по нажатию кнопки содержит определение первоначального корректирования нуля (ΔT0) посредством:
прекращения потока к расходомеру, чтобы обеспечивать условие нулевого расхода; и
инициирования процедуры калибровки нуля, чтобы определять первоначальное корректирование нуля (ΔT0) в качестве расхода, измеренного во время условия нулевого расхода.
8. Способ по п. 6, в котором массовый расход определяется с помощью уравнения, содержащего: 
- массовый расход;
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля; и
ΔT03 - двухступенчатое корректирование;
при этом:
процедура двухступенчатого обнуления содержит определение двухступенчатого корректирования (ΔT03) посредством:
вычитания двухступенчатой временной задержки (ΔT02) из корректирования нуля (ΔT0), при этом двухступенчатая временная задержка (ΔT02) является значением, измеренным во время условия ненулевого расхода.
9. Способ по п. 6, в котором предпочтительный алгоритм содержит первый алгоритм, когда расход текучей среды в расходомере меньше значения отсечки низкого расхода.
10. Способ по п. 9, в котором значение отсечки низкого расхода находится между 40 нс и 1000 нс.
11. Способ по п. 9, в котором значение отсечки низкого расхода содержит пользовательские входные данные, диктующие значение отсечки низкого расхода.
12. Способ по п. 1, в котором предпочтительный алгоритм содержит первый алгоритм, когда плотность текучей среды в расходомере ниже предварительно определенного порогового значения.
13. Способ по п. 1, в котором предпочтительный алгоритм содержит первый алгоритм, когда присутствует посткалибровочная компенсация.
14. Способ по п. 1, в котором предпочтительный алгоритм содержит второй алгоритм, когда расход текучей среды в расходомере больше значения отсечки низкого расхода, плотность текучей среды в расходомере выше предварительно определенного порогового значения и посткалибровочная компенсация отсутствует.
15. Расходомер (5), выполненный с возможностью измерять расход и плотность текучей среды в нем, содержащий:
измерительный электронный прибор (20), содержащий систему (303) обработки и систему (304) хранения;
множество тензодатчиков (105, 105'), прикрепленных к трубам (103A, 103B) расходомера (5) на связи с измерительным электронным прибором (20);
возбуждающее устройство (104), прикрепленное к трубам (103A, 103B) расходомера (5) на связи с измерительным электронным прибором (20);
при этом измерительный электронный прибор (20) выполнен с возможностью измерять расход текучей среды для технологической среды в узле (10) датчика и определять по меньшей мере одну характеристику текучей среды для технологической текучей среды, причем по меньшей мере одна характеристика текучей среды включает в себя плотность текучей среды; и
при этом измерительный электронный прибор (20) выполнен с возможностью определять предпочтительный алгоритм из множества алгоритмов на основе расхода текучей среды и плотности текучей среды и применять предпочтительный алгоритм к рабочей процедуре (314).
16. Расходомер (5) по п. 15, в котором по меньшей мере одна характеристика текучей среды включает в себя фазу текучей среды.
17. Расходомер (5) по п. 15, в котором по меньшей мере одна характеристика текучей среды включает в себя плотность текучей среды и в котором измерительный электронный прибор (20) выполнен с возможностью определять, что текучая среда является газом, если плотность ниже предварительно определенного порогового значения, и выполнен с возможностью определять, что текучая среда является жидкостью, если плотность выше предварительно определенного порогового значения.
18. Расходомер (5) по п. 17, в котором предварительно определенное пороговое значение равно 800 кг/м3.
19. Расходомер (5) по п. 15, в котором множество алгоритмов содержит по меньшей мере первый алгоритм и второй алгоритм, при этом:
первый алгоритм содержит процедуру обнуления по нажатию кнопки; и
второй алгоритм содержит процедуру двухступенчатого обнуления.
20. Расходомер (5) по п. 19, в котором алгоритм массового расхода содержит уравнение:  , в котором:
, в котором:
- массовый расход;
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
при этом:
процедура обнуления по нажатию кнопки содержит первоначальное корректирование нуля (ΔT0), определенное как расход, измеренный в то время, когда расходомер (5) испытывает условие нулевого расхода.
21. Расходомер (5) по п. 19, в котором алгоритм массового расхода содержит уравнение:
- массовый расход;
FCF - коэффициент калибровки расхода;
ΔTmeasured - измеренная временная задержка;
ΔT0 - первоначальное корректирование нуля;
ΔT03 - двухступенчатое корректирование;
при этом:
процедура двухступенчатого обнуления содержит двухступенчатое корректирование (ΔT03), определенное посредством вычитания двухступенчатой временной задержки (ΔT02) из корректирования нуля (ΔT0), при этом двухступенчатая временная задержка (ΔT02) является значением расхода, измеренным во время условия ненулевого расхода.
22. Расходомер (5) по п. 19, в котором предпочтительный алгоритм содержит первый алгоритм, когда расход текучей среды в расходомере меньше значения отсечки низкого расхода.
23. Расходомер (5) по п. 22, в котором значение отсечки низкого расхода находится между 40 нс и 1000 нс.
24. Расходомер (5) по п. 22, в котором значение отсечки низкого расхода содержит пользовательские входные данные, диктующие значение отсечки низкого расхода.
25. Расходомер (5) по п. 19, в котором предпочтительный алгоритм содержит первый алгоритм, когда текучая среда в расходомере является газом.
26. Расходомер (5) по п. 19, в котором предпочтительный алгоритм содержит первый алгоритм, когда присутствует посткалибровочная компенсация.
27. Расходомер (5) по п. 19, в котором предпочтительный алгоритм содержит второй алгоритм, когда расход текучей среды в расходомере больше значения отсечки низкого расхода, текучая среда в расходомере является жидкостью и посткалибровочная компенсация отсутствует.
| WO 2005031285 A1, 07.04.2005 | |||
| US 8239157 B2, 07.08.2012 | |||
| US 7617055 B2, 10.11.2009 | |||
| US 4109524 A1, 29.08.1978. |

