ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к измерителям и, более конкретно, к способу и аппарату для аттестации сборки датчика измерителя.
УРОВЕНЬ ТЕХНИКИ
Вибрационные измерители, например вибрационные денситометры и расходомеры Кориолиса, хорошо известны и используются для измерения массового расхода и получения другой информации о веществах внутри трубопровода. Измеритель содержит сборку датчика и участок электроники. Вещество в пределах сборки датчика может течь или быть стационарным. Датчик каждого типа может иметь уникальные характеристики, которые измеритель должен учитывать для достижения оптимального рабочего режима. Например, для некоторых датчиков может быть необходимо, чтобы аппарат расходомерного трубопровода колебался с определенными уровнями смещения. Сборки датчиков других типов могут требовать специальных алгоритмов компенсации.
Электронный измеритель обычно включает в себя сохраняемые значения калибровки датчика для конкретного используемого датчика. Электронный измеритель использует эти значения калибровки датчика для точного измерения массового расхода и плотности. Значения калибровки датчика могут содержать значения калибровки, полученные из измерений в режиме его тестирования, например, при его изготовлении. Поэтому датчик каждого типа может иметь уникальные значения калибровки.
Примерные расходомеры Кориолиса раскрыты в Патенте США 4,109,524, Патенте США 4,491,025, и Re. 31,450, все на имя J.E.Smith и др. Эти расходомеры имеют один или несколько трубопроводов прямой или изогнутой конфигурации. Каждая конфигурация трубопровода в массовом расходомере Кориолиса имеет набор собственных колебательных мод, которые могут быть простыми изгибными модами, крутильными модами или модами связанного типа. В каждом трубопроводе могут быть возбуждены колебания на предпочтительной моде.
Вещество втекает в сборку датчика расходомера из присоединенного магистрального трубопровода со стороны впускного отверстия датчика, направляется через трубопровод(ы) и выходит из датчика со стороны выпускного отверстия датчика. Собственные колебательные моды колеблющейся и заполненной веществом системы отчасти определяются суммарной массой трубопроводов и вещества, текущего внутри трубопроводов.
Когда поток через датчик отсутствует, приводная сила, приложенная к трубопроводу(ам), заставляет все точки вдоль трубопровода(ов) осциллировать с одинаковой фазой, или с малым "смещением нуля", которое представляет собой временную задержку, измеренную при нулевом потоке. Как только вещество начинает течь через датчик, силы Кориолиса приводят к тому, что каждая точка вдоль трубопровода(ов) имеет отличающуюся фазу. Например, фаза у впускного конца датчика отстает от фазы в центрированном положении привода, тогда как фаза при выпуске опережает фазу в центрированном положении привода. Тензометрические датчики на трубопроводе(ах) производят синусоидальные сигналы, отображающие движение трубопровода(ов). Снимаемые с тензометрических датчиков сигналы обрабатываются для определения разности фаз между тензометрическими датчиками. Разность фаз между двумя или несколькими тензометрическими датчиками пропорциональна массовому расходу вещества, текущего через трубопровод(ы).
Массовый расход вещества может быть определен умножением разности фаз на Калибровочный Коэффициент Расхода (FCF). До установки сборки датчика расходомера в трубопроводную магистраль коэффициент FCF определяется посредством процесса калибровки. В процессе калибровки текучая среда проходит через расходомерную трубку при известном расходе и вычисляется соотношение между разностью фаз и расходом (то есть коэффициент FCF). Сборка датчика расходомера впоследствии определяет расход умножением FCF на разность фаз тензометрических датчиков. Кроме того, при определении расхода могут быть учтены и другие калибровочные коэффициенты.
Во многих приложениях вибрационный измеритель содержит сеть вибрационных датчиков, которая может включать в себя множество датчиков, работающих в пределах некоторой сети передачи данных. Сеть обычно включает в себя систему контроля датчиков, которая собирает измеренные данные расхода, управляет работой и координирует работу различных датчиков. Сеть может включать в себя вибрационные датчики различных размеров, моделей, годов выпуска и вариантов электронных и программных средств. Одна из проблем, с которой сталкиваются пользователи измерителей, заключается в необходимости правильной идентификации конкретной составляющей части датчика, используемой с электронным измерителем. Имеются различные решения в предшествующем уровне техники, например, ручной ввод модели/типа датчика в электронный измеритель, получение электронным измерителем данных типа датчика от датчика в форме считываемого кода или идентификатора, сохраняемого в памяти, включенной в датчик, получение данных калибровки для датчика, чтобы идентифицировать тип датчика, и т.д. Эти решения предшествующего уровня техники раскрыты в Патенте США 7523,639, переуступленном Micro Motion, Inc. и, тем самым, включенном в настоящий документ посредством ссылки. Однако хотя эти подходы предшествующего уровня техники могут идентифицировать различные типы датчиков, производители все же сталкиваются с конкуренцией "поддельных" сборок датчика, то есть неправомочных экземпляров сборок датчиков, которые используются с электронным измерителем производителя. Потребители могут быть обескуражены и могут думать, что они используют измеритель конкретного производителя, хотя фактически они используют только часть измерителя производителя. Например, пользователь может использовать электронный измеритель, изготовленный и проданный Micro Motion, Inc, тогда как сборка датчика вибрационного измерителя изготовлена другой компанией. В результате, вибрационный измеритель не будет функционировать в соответствии со стандартами Micro Motion. Это не только уменьшает продажи производителя, но также может и навредить признанию бренда производителя, если поддельный датчик не удовлетворяет стандартам качества и точности производителя.
До настоящего изобретения ограничение использования потребителями конкретного электронного измерителя с поддельным датчиком было затруднено, если не невозможно, пока потребитель имел возможность ввести в электронный измеритель правильную информацию калибровки для датчика. Даже в подходах предшествующего уровня техники, когда значения калибровки для датчика были получены, подход не ограничивал использование электронного измерителя. Например, вышеупомянутый патент '639 раскрывает идентификацию типа расходомера, когда значения калибровки для сборки датчика расходомера принимаются и сопоставляются с известными значениями калибровки датчика. На основании сопоставления идентифицируется тип датчика. Проблема этого подхода заключается в том, что тип датчика просто выбирается значениями калибровки, которые наиболее близко соответствуют сохраняемым значениям. Поэтому даже если значения калибровки, принятые электронным измерителем, не соответствуют сохраняемому значению, соответствующему конкретному типу датчика, система просто предполагает, что датчик содержит тип датчика с наиболее близкими значениями калибровки и что ошибка возникла вследствие некоторой аномалии в процессе изготовления или в процессе калибровки. Следовательно, поддельный датчик может быть использован даже с подходом, раскрытым в патенте '639.
Настоящее изобретение решает эту и другие проблемы и позволяет достичь преимущества в данной области техники. Настоящим изобретением аттестуется тип датчика посредством сравнения одного или нескольких принятых значений калибровки с известными значениями калибровки. Если одно или несколько принятых значений калибровки выходят за пределы заданного допустимого отклонения, электронный измеритель отклоняет датчик как содержащий недопустимый типа датчика. Например, датчик может содержать недопустимый тип датчика, если он изготовлен другой фирмой.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с вариантом осуществления изобретения обеспечивается способ для аттестации сборки датчика измерителя. Способ содержит этап приема одного или нескольких значений калибровки датчика. В соответствии с вариантом осуществления изобретения способ дополнительно содержит этап сравнения принятых значений калибровки датчика с одним или несколькими известными значениями калибровки датчика. В соответствии с вариантом осуществления изобретения способ также содержит этап аттестации сборки датчика, если одно или несколько принятых значений калибровки датчика находятся в пределах заданного допустимого отклонения одного или нескольких известных значений калибровки датчика.
В соответствии с вариантом осуществления изобретения обеспечивается электронный измеритель для измерителя. Измеритель включает в себя сборку датчика. В соответствии с вариантом осуществления изобретения электронный измеритель включает в себя систему обработки данных, сконфигурированную для приема одного или нескольких значений калибровки датчика. Система обработки данных дополнительно сконфигурирована для сравнения принятых значений калибровки датчика с одним или несколькими известными значениями калибровки датчика. В соответствии с вариантом осуществления изобретения система обработки данных дополнительно сконфигурирована для аттестации сборки датчика, если одно или несколько принятых значений калибровки датчика находятся в пределах заданного допустимого отклонения известного значения калибровки датчика одного или нескольких известных значений калибровки датчика.
АСПЕКТЫ ИЗОБРЕТЕНИЯ
В соответствии с аспектом изобретения способ для аттестации сборки датчика измерителя содержит этапы:
приема одного или нескольких значений калибровки датчика;
сравнения принятого значения калибровки датчика с одним или несколькими известными значениями калибровки датчика; и
аттестации сборки датчика, если одно или несколько принятых значений калибровки датчика находятся в пределах заданного допустимого отклонения одного или нескольких известных значений калибровки датчика.
Предпочтительно способ дополнительно содержит этап неаттестации сборки датчика, если одно или несколько принятых значений калибровки датчика превышают известные значения калибровки датчика больше чем на величину заданного допустимого отклонения.
Предпочтительно способ дополнительно содержит для электронного измерителя для измерителя, связанного со сборкой датчика, этап недопущения работы со сборкой датчика, если сборка датчика не аттестована.
Предпочтительно способ дополнительно содержит этап идентификации типа датчика для сборки датчика на основании сравнения принятых значений калибровки датчика и известных значений калибровки датчика.
Предпочтительно способ дополнительно содержит этап сохранения идентифицированного типа датчика наряду с идентификатором датчика.
Предпочтительно одно из одного или нескольких принятых значений калибровки датчика содержит Калибровочный Коэффициент Расхода (FCF).
Предпочтительно одно из одного или нескольких принятых значений калибровки датчика содержит значение невозмущенной гармонической частоты (Kl).
Предпочтительно сборка датчика содержит составляющую часть датчика расходомера Кориолиса.
В соответствии с другим аспектом изобретения электронный измеритель для измерителя, включающего в себя сборку датчика, включает в себя систему обработки данных, сконфигурированную для:
приема одного или нескольких значений калибровки датчика;
сравнения принятых значений калибровки датчика с одним или несколькими известными значениями калибровки датчика; и
аттестации сборки датчика, если одно или несколько принятых значений калибровки датчика находятся в пределах величины заданного допустимого отклонения одного или нескольких известных значений калибровки датчика.
Предпочтительно система обработки данных дополнительно сконфигурирована для неаттестации сборки датчика, если одно или несколько принятых значений калибровки датчика превышают известные значения калибровки датчика больше чем на величину заданного допустимого отклонения.
Предпочтительно система обработки данных дополнительно сконфигурирована так, чтобы не допустить работу электронного измерителя со сборкой датчика, если сборка датчика не аттестована.
Предпочтительно система обработки данных дополнительно сконфигурирована для идентификации типа датчика сборки датчика на основании сравнения принятых значений калибровки датчика и известных значений калибровки датчика.
Предпочтительно система обработки данных дополнительно сконфигурирована так, чтобы сохранить идентифицированный тип датчика наряду с идентификатором датчика.
Предпочтительно одно из одного или нескольких принятых значений калибровки датчика содержит Калибровочный Коэффициент Расхода (FCF).
Предпочтительно одно из одного или нескольких принятых значений калибровки датчика содержит значение невозмущенной гармонической частоты (Kl).
Предпочтительно сборка датчика содержит составляющую часть датчика расходомера Кориолиса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 изображает измеритель в соответствии с вариантом осуществления изобретения.
Фиг. 2 - электронный измеритель в соответствии с вариантом осуществления изобретения.
Фиг. 3 - диаграмма, показывающая соотношение между некоторыми типами датчика и значениями FCF И K1.
Фиг. 4 - блок-схема последовательности операций подпрограммы аттестации датчика в соответствии с вариантом осуществления изобретения.
ОСУЩЕСВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1-4 и нижеследующее описание демонстрируют конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант изобретения. С целью пояснения принципов изобретения некоторые обычные аспекты были упрощены или исключены. Специалистам в данной области техники будут понятны возможные вариации этих примеров, которые находятся в пределах объема изобретения. Специалистам в данной области техники будет понятно, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множество вариаций изобретения. Таким образом, изобретение не ограничивается описанными ниже конкретными примерами, но только пунктами формулы и их эквивалентами.
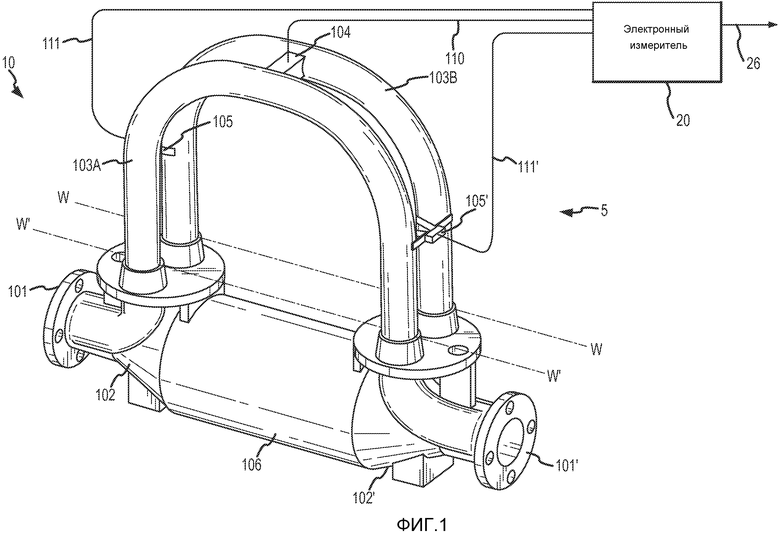
На Фиг. 1 показан вибрационный измеритель 5 в виде расходомера Кориолиса, содержащего сборку 10 датчика и электронный измеритель 20 в соответствии с вариантом осуществления изобретения. В показанном варианте осуществления сборка 10 датчика принимает текущую текучую среду; однако сборки датчика измерителей не обязательно ограничены структурой, в которой исследуемая текучая среда течет. Поэтому сборка датчика может содержать колеблющийся участок вибрационного денситометра, в котором текучая среда не течет, регистрирующий участок ультразвуковых расходомеров, регистрирующий участок магнитных объемных измерителей, и т.д. Кроме того, хотя настоящее изобретение описано в связи с расходомерами, в качестве примера, настоящее изобретение применимо к другим приложениям, когда измеритель содержит сборку датчика и участок электроники, в которых значения калибровки используются в связи со сборкой датчика измерителя, чтобы увеличить точность измерений.
В показанном варианте осуществления электронный измеритель 20 соединяется со сборкой 10 датчика для измерения одного или нескольких параметров протекающего вещества, например плотности, массового расхода, объемного расхода, суммарного массового расхода, температуры, и для получения другой информации. Хотя электронный измеритель 20 показан как связанный с единственным датчиком 10, следует отметить, что электронный измеритель 20 может быть связан с множественными сборками измерителя, включающими в себя один или несколько дополнительных электронных измерителей (не показано). Кроме того, следует отметить, что хотя вибрационный измеритель 5 описан как содержащий расходомер Кориолиса, вибрационный измеритель 5 с таким же успехом может содержать другой тип вибрационного измерителя, например вибрационный денситометр, вибрационный объемный расходомер или некоторый другой вибрационный расходомер, который не имеет всех возможностей измерения расходомеров Кориолиса. Поэтому настоящее изобретение не следует ограничивать расходомерами Кориолиса. Практически электронный измеритель 20 может быть связан с другими типами сборок датчика, с текущей текучей средой или стационарной текучей средой.
Датчик 10 включает в себя пару фланцев 101 и 101', манифольды 102 и 102' и трубопроводы 103A и 103B. Манифольды 102, 102' прикреплены к противоположным концам трубопроводов 103A, 103B. Фланцы 101 и 101' расходомера Кориолиса прикреплены к противоположным концам разделителя (проставки) 106. Проставка 106 поддерживает определенное расстояние между манифольдами 102 и 102', чтобы предотвратить нежелательные колебания в трубопроводах 103A и 103B. Трубопроводы 103A и 103B вытянуты наружу от манифольдов по существу параллельным образом. Когда датчик 10 вставляется в трубопроводную магистраль (не показана), которая переносит текучее вещество, вещество входит в датчик 10 через фланец 101, проходит через впускной манифольд 102, где суммарное количество вещества направляется в трубопроводы 103A и 103B, протекает через трубопроводы 103A и 103B, и назад, в выпускной манифольд 102', где вещество выходит из датчика 10 через фланец 101'.
Датчик 10 также может включать в себя привод 104. Привод 104 показан как прикрепленный к трубопроводам 103A, 103B в положении, где привод 104 может возбудить колебания трубопроводов 103A, 103B на приводной моде, например. Привод 104 может содержать одно из многих известных устройств, например катушку, установленную на трубопроводе 103A, и противостоящий магнит, установленный на трубопроводе 103B. Приводной сигнал в виде переменного тока может быть предоставлен электронным измерителем 20, например, по каналу 110 и пропущен через катушку, чтобы возбудить колебания обоих трубопроводов 103A, 103B относительно их соответствующих изгибных осей W-W и W'-W'.
Датчик 10 включает в себя пару тензометрических датчиков 105, 105', которые прикреплены к трубопроводам 103A, 103B. В соответствии с вариантом осуществления изобретения тензометрические датчики 105, 105' могут быть электромагнитными детекторами, например тензометрическими магнитами и тензометрическими индукционными катушками, которые производят тензометрические сигналы, отображающие скорость перемещения и положение трубопроводов 103A, 103B. Например, тензометрические датчики 105, 105' могут подавать тензометрические сигналы на электронный измеритель 20 по каналам 111, 111'. Специалисты в данной области техники увидят, что перемещение трубопроводов 103A, 103B пропорционально определенным параметрам текущего вещества, например массовому расходу и плотности вещества, текущего через трубопроводы 103A, 103B.
В соответствии с вариантом осуществления изобретения электронный измеритель 20 принимает тензометрические сигналы от тензометрических датчиков 105, 105'. Канал 26 может предоставить входное и выходное средство, которое позволяет одному или нескольким электронным измерителям 20 взаимодействовать с оператором. Электронный измеритель 20 может измерять один или несколько параметров исследуемой текучей среды, например разность фаз, частоту, временную задержку, плотность, массовый расход, объемный расход, суммарный массовый расход, температуру, поправки к измерениям, и может получать другую информацию.
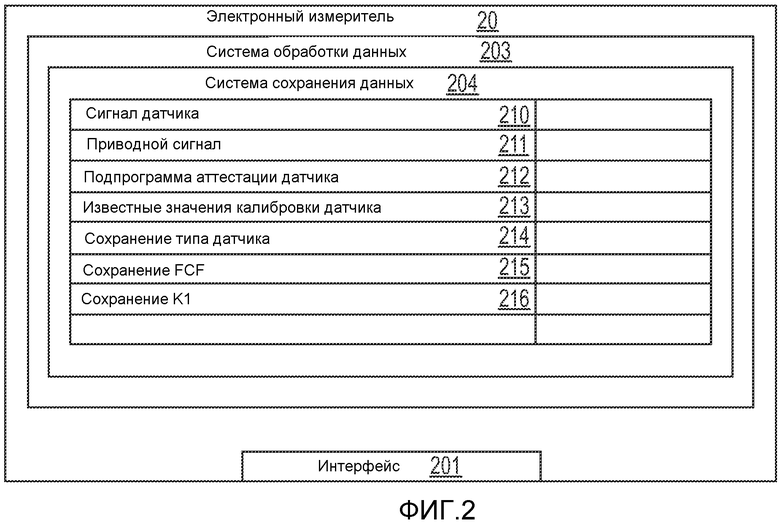
На Фиг. 2 показан электронный измеритель 20, обозначенный на Фиг. 1, в соответствии с вариантом осуществления изобретения. Электронный измеритель 20 может включать в себя интерфейс 201 и систему 203 обработки. Система 203 обработки может включать в себя систему 204 памяти. Система 204 памяти может содержать внутреннюю память, как это показано, или, альтернативно, может содержать внешнюю память. Электронный измеритель 20 может создавать приводной сигнал 211 и подавать приводной сигнал 211 на привод 104, показанный на Фиг. 1. Электронный измеритель 20 также может принимать сигналы 210 датчика от датчика 10, например от тензометрических датчиков 105, 105', через кабельные соединения 111, 111', показанные на Фиг. 1. В некоторых вариантах осуществления сигналы 210 датчика могут быть приняты от привода 104. Электронный измеритель 20 может функционировать как денситометр или может функционировать как массовый расходомер, включая в себя работу в качестве расходомера Кориолиса. Следует отметить, что электронный измеритель 20 также может работать как сборка вибрационного расходомера некоторого другого типа, и предоставленные конкретные примеры не должны ограничивать объем притязаний настоящего изобретения. Электронный измеритель 20 может обрабатывать сигналы 210 датчика для получения одного или нескольких параметров потока вещества, текущего через трубопроводы 103A, 103B.
Интерфейс 201 может принимать сигналы 210 датчика от привода 104 или от тензометрических датчиков 105, 105' через соединения 110, 111, 111'. Интерфейс 201 может выполнить любое необходимое или желаемое преобразование сигнала, например любого рода форматирование, усиление, буферизацию, и т.д. Альтернативно, некоторые или все преобразования сигнала могут быть выполнены в системе 203 обработки данных. Кроме того, интерфейс 201 может обеспечить обмен данными между электронным измерителем 20 и внешними устройствами. Интерфейс 201 может быть приспособлен для любого типа электронной, оптической или беспроводной связи.
Интерфейс 201 в одном варианте осуществления может включать в себя цифровой преобразователь (не показан), причем сигналы 210 датчика содержат аналоговые сигналы датчика. Цифровой преобразователь может осуществлять выборку и оцифровывать аналоговые сигналы датчика и производить цифровые сигналы датчика. Цифровой преобразователь может также выполнить любое необходимое прореживание, причем цифровой сигнал датчика прореживается, чтобы сократить объем необходимой обработки сигнала и сократить время обработки.
Система 203 обработки может управлять работой электронного измерителя 20 и обрабатывать измерения потока датчиком 10. Система 203 обработки может выполнять обработку данных, требуемую для выполнения одной или нескольких подпрограмм обработки, например подпрограммы 212 аттестации датчика, а также может обрабатывать данные измерений потока для получения одного или нескольких параметров потока.
Система 203 обработки может содержать универсальный компьютер, микропроцессорную систему, логическую схему или некоторое другое универсальное или специализированное устройство обработки данных. Система 203 обработки данных может быть распределена по множеству устройств обработки данных. Система 203 обработки данных может включать в себя любого вида составной или независимый электронный носитель данных, например систему 204 памяти.
Следует понимать, что электронный измеритель 20 может включать в себя различные другие составляющие части и функции, которые общеизвестны в данной области техники. Эти дополнительные признаки не включены в описание и чертежи для краткости. Поэтому настоящее изобретение не следует ограничивать конкретными показанными и рассмотренными вариантами осуществления.
Как рассмотрено выше, в соответствии с вариантом осуществления изобретения электронный измеритель 20 может осуществлять подпрограмму 212 аттестации датчика для аттестации сборки датчика. Подпрограмма 212 аттестации датчика может аттестовать тип датчика для одного или нескольких датчиков, связанных с электронным измерителем 20. Хотя на Фиг. 1 показан только единственный датчик 10, связанный с электронным измерителем 20, специалисты в данной области техники легко увидят, что множественные датчики могут быть связаны с электронным измерителем 20. Кроме того, электронный измеритель 20 может быть приспособлен для работы с множеством датчиков различных типов. Поэтому важно подтвердить, что конкретные датчики, связанные с электронным измерителем 20, содержат аттестованные датчики.
Каждый датчик, например датчик 10, связанный с электронным измерителем 20, имеет различные значения калибровки. Например, если датчик 10 содержит расходомер Кориолиса, значения калибровки могут содержать FCF и невозмущенное значение (Kl) гармонической частоты. Коэффициент FCF отображает геометрию расходомерного трубопровода конкретного аппарата датчика. Коэффициент FCF может учитывать вариации размеров расходомерного трубопровода во время изготовления и также может учитывать вариации колебательного отклика вследствие вариаций свойств вещества расходомерного трубопровода. Значение Kl отображает невозмущенную гармоническую частоту датчика, измеренную с воздухом в расходомерном трубопроводе(-ах) и при температуре калибровки 0°С. Значение Kl обычно приводится в единицах частоты или в единицах времени (то есть период волны). Другие значения калибровки датчика (не показаны) могут содержать, но без ограничений, значение K (то же самое, что и Kl, но для воды в датчике), значение K3 для влияния потока на плотность, значение температурной калибровки, и т.д. Другие значения калибровки датчика также предполагаются и находятся в пределах объема притязаний настоящего изобретения.
Как показано на Фиг. 2, система 204 памяти электронного измерителя 20 может хранить различные значения 215 FCF, различные значения 216 Kl, которые могут быть приняты во время выполнения подпрограммы 212 аттестации датчика, например, а также и другие известные значения 213 калибровки датчика. Известные значения 213 калибровки датчика могут содержать структуру данных, которая хранит известные значения, используемые для аттестации типа датчика (рассматривается ниже). Например, известные значения 213 калибровки датчика могут содержать таблицу данных. Однако следует понимать, что другие структуры данных могут использоваться для сохранения и сопоставления значений калибровки датчика, например таблицы соответствия, и т.д. Электронный измеритель 20 может сохранять определенный тип датчика в памяти 214 типа датчика, который может быть сопоставлен с одним или несколькими значениями калибровки, как объясняется более подробно ниже.
В одном варианте осуществления известные значения 213 калибровки датчика сохраняются в таблице 213 корреляции. Таблица 213 корреляции может включать в себя множественные записи типов датчика. Запись типа датчика таблицы 213 корреляции включает в себя набор известных значений калибровки датчика и соответствующий тип датчика для набора известных значений калибровки датчика. Поэтому для ввода конкретного набора значений калибровки датчика таблица 213 корреляции выводит уникальный тип датчика, соответствующий определенному набору значений калибровки датчика, в пределах заданного допустимого отклонения. Если входные значения калибровки датчика выходят за пределы заданного допустимого отклонения любого из сохраненных значений калибровки датчика, электронный измеритель 20 определяет, что входные значения соответствуют неаттестованному датчику, и в некоторых вариантах осуществления не разрешает работу электронного измерителя 20 с неаттестованным датчиком.
На Фиг. 3 показана диаграмма соотношения между некоторыми типами датчика и значениями FCF и K1. Следует отметить, что не все типы датчика показаны на диаграмме. Из диаграммы можно видеть, что значения FCF И K1 для каждого представленного типа датчика сильно кластеризованы. Поэтому, сравнивая значения калибровки данного датчика с этими известными параметрами и кластерами, тип данного датчика может быть утвержден. И наоборот, если входное значение превышает заданное допустимое отклонение наиболее близких соответствующих значений, то электронный измеритель 20 может отклонить датчик как недопустимый. Например, одна из немногих точек, видимых вследствие малых допустимых отклонений, находится в правом верхнем углу, помеченная как 340. Фактический коэффициент FCF для конкретного датчика составляет 1552,9, тогда как значение Kl составляет 18564. В соответствии с вариантом осуществления изобретения, различные точки показаны как окружающие фактические значения FCF И K1. Эти точки определяют заданные допустимые отклонения. Например, заданное допустимое отклонение для значения FCF может содержать +/-0,05%, тогда как заданное допустимое отклонение для значения Kl может содержать +/-0,75%. Эти значения представляют собой просто примеры и никоим образом не должны ограничивать объем притязаний настоящего изобретения. Поэтому если значения калибровки датчика, принятые электронным измерителем 20, находятся в пределах допустимого отклонения, определенного точками, окружающими фактические значения FCF И K1, датчик содержит допустимый датчик. И наоборот, в соответствии с вариантом осуществления изобретения, если значения калибровки, принятые электронным измерителем 20, превышают допустимые отклонения, или в положительном, или в отрицательном направлениях для каждого значения калибровки датчика, электронный измеритель 20 может отклонить датчик как недопустимый. Имеющиеся известные значения 213 калибровки датчика, таким образом, определяют допустимость конкретного аттестуемого датчика. В соответствии с вариантом осуществления изобретения, если электронный измеритель 20 определяет, что датчик недопустим, электронный измеритель 20 может не допустить работу с датчиком 10. Например, система 203 обработки может не допустить посылку приводного сигнала 211 электронным измерителем 20 на привод 104 и/или обработку принятых сигналов 210 датчика, если датчик считается не аттестованным.
Тип датчика диктуется факторами, включающими в себя, но без ограничения, производителя, класс точности датчика, номинальное давление, номинальную температуру, вещество или вещества, используемые при изготовлении датчика, и линейный размер трубопровода, формирующего датчик. Каждый из этих параметров датчика может влиять на значения калибровки датчика или задавать значения калибровки датчика, используемые при определении типа датчика. Например, единственный производитель может произвести тысячи датчиков определенного типа, причем датчиков, каждый из которых имеет коэффициент FCF в пределах до 0,05% один относительно другого, и значения Kl в пределах до 0,75% один относительно другого. И наоборот, другие производители, которые пытаются воспроизвести тип датчика, могут иметь значения FCF и K1 вполне вне этих допустимых отклонений. Следует отметить, что вышеупомянутые значения приведены исключительно для примера, и значения могут превышать эти допустимые отклонения для других производителей, а также и для других типов датчика, выполненных тем же самым производителем.
В соответствии с вариантом осуществления изобретения электронный измеритель может использовать возможности воспроизводства конкретного производителя, чтобы исключить датчики как недопустимые по значениям калибровки, которые превышают заданное допустимое отклонение от сохраняемых значений калибровки и, по-видимому, выполнены другим производителем. Если датчик имеет значения калибровки, которые превышают допустимое отклонение сохраняемых значений калибровки, но пользователь, или оператор, просто вводит другие значения, чтобы находиться в пределах заданного допустимого отклонения и, таким образом, аттестовать датчик, электронный измеритель 20 может принять датчик как приемлемый тип датчика, но любые производимые измерения будут неточны, поскольку используются неправильные значения калибровки для измерения одного или нескольких параметров текучей среды.
В соответствии с вариантом осуществления изобретения электронный измеритель 20 может удаленно считывать значения калибровки, например, получая значения калибровки датчика от дополнительных датчиков (не показаны) через линию 26 связи, например. Альтернативно, значения калибровки датчика могут быть введены в электронный измеритель 20 пользователем через пользовательский интерфейс 201. В качестве другой альтернативы значения калибровки датчика могут быть получены от дополнительных датчиков беспроводным образом через интерфейс 201 или через другие удаленные устройства через интерфейс 201 связи. В соответствии с другим вариантом осуществления изобретения датчик может включать в себя устройство памяти (не показано), которое может сохранять значения калибровки датчика. Электронный измеритель 20 может затем принять значения калибровки датчика, как только электронный измеритель 20 свяжется с датчиком и, таким образом, с устройством памяти, как это раскрыто в вышеупомянутом патенте '639.
Значения калибровки датчика используются в работе электроники измерителя для калибровки одного или нескольких параметров текучей среды. Значения калибровки датчика обычно получаются из измерений в тестовом режиме при его производстве. Значения калибровки датчика обычно сохраняются в электронном измерителе прежде, чем датчик будет отправлен с производства. Однако значения калибровки датчика могут быть запрограммированы или перепрограммированы в электронном измерителе пользователем уже при эксплуатации. Преимущественно, если электронный измеритель 20 реконфигурируется, то значения могут быть перепрограммированы так, чтобы конкретная сборка датчика еще могла подтверждаться как допустимый тип датчика. Это программирование обычно облегчается ярлыком, прикрепленным к датчику, с ярлыком проштампованным, выбитым или напечатанным с измеренными при производстве значениями калибровки датчика. Поэтому пользователь может перепрограммировать электронный измеритель с правильной калибровочной информацией, если это требуется, например, в случае потерь мощности, утери запоминания, реконфигурации, замены датчика, и т.д.
На Фиг. 4 показана подпрограмма аттестации датчика 212 в соответствии с вариантом осуществления изобретения. Подпрограмма 212 аттестации датчика может быть выполнена электронным измерителем 20, например. Система 203 обработки данных может быть сконфигурирована для выполнения необходимой обработки сигналов и данных, чтобы выполнить подпрограмму 212 аттестации датчика, например. Подпрограмма 212 аттестации датчика может быть реализована в программном продукте, выполняемом электронным измерителем 20.
Подпрограмма 212 аттестации датчика начинается на этапе 401, когда одно или несколько значений калибровки датчика могут быть получены электронным измерителем 20 для аттестуемой сборки датчика, например, датчика 10. Значения калибровки датчика могут быть определены из подпрограммы калибровки, например, которые являются общеизвестными в данной области техники. Как предварительно рассмотрено, значения калибровки датчика могут содержать значения FCF и Kl. Значения калибровки датчика могут быть одновременно или предварительно приняты от пользователя через пользовательский интерфейс или могут быть одновременно или предварительно приняты от удаленного терминала, например. Хотя показанная на Фиг. 3 диаграмма содержит два значения калибровки датчика, следует отметить, что в некоторых вариантах осуществления датчик может быть аттестован, используя только единственное значение калибровки датчика. Альтернативно, могут быть использованы больше чем два значения калибровки датчика.
На этапе 402 принятые значения калибровки датчика сравниваются с известными значениями 213 калибровки датчика, по существу представительных для различных типов датчиков, которые приняты как содержащие аттестованные типы датчиков. Известные значения калибровки датчика могут быть извлечены из графика, таблицы соответствия, и т.д. Если принятые значения калибровки датчика превышают наиболее близкое известное значение калибровки датчика больше чем на заданное допустимое отклонение, процесс переходит на этап 403, где аттестуемый датчик признается неаттестованным. И наоборот, если принятые значения калибровки датчика находятся в пределах заданного допустимого отклонения, процесс переходит на этап 404, где аттестуемый датчик проходит аттестацию и электронный измеритель 20 может работать с датчиком.
Процесс может дополнительно включать в себя дополнительный этап 405, где аттестованный тип датчика сохраняется. Тип датчика может быть сохранен в структуре данных некоторым образом наряду с идентификатором данного датчика 10. Идентификатор датчика может быть любого рода сетевым адресом, номером датчика, серийным номером датчика, присвоенным номером датчика, и т.д., что используется для идентификации данного датчика 10.
Система и способ аттестации датчика в соответствии с настоящим изобретением отличаются от техники предшествующего уровня тем, что значения калибровки датчика используются не только для идентификации типа датчика, но и для аттестации типа датчика как приемлемого датчика, используемого с электронным измерителем. Подходы техники предшествующего уровня не ограничивали использование электронного измерителя только с аттестованным датчиком. Фактически, электронный измеритель просто искал "наилучшее приближение" для датчика, связанного с электронным измерителем. Техника предшествующего уровня не препятствовала использованию поддельной сборки датчика с электронным измерителем 20.
Аттестация датчика в соответствии с настоящим изобретением может быть осуществлена в соответствии с любым из вариантов осуществления для получения некоторых преимуществ, если это желательно. Аттестация датчика предоставляет дешевую проверку допустимости использования датчика. Никакие дополнительные аппаратные средства не требуются в датчике, и изобретение может быть осуществлено с помощью дополнительных программных средств. Аттестация датчика предоставляет точную и надежную проверку допустимости датчика без привнесения дополнительных проблем с надежностью. В соответствии с вариантом осуществления изобретения аттестация датчика предоставляет проверку допустимости датчика, которая не требует никаких дополнительных действий или операций со стороны пользователя или системного оператора. Аттестация датчика предоставляет проверку допустимости датчика, которая использует информацию, заложенную в самом датчике или в сети датчиков.
Подробные описания вышеупомянутых вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, рассматриваемых авторами как находящиеся в пределах объема притязаний изобретения. Действительно, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов осуществления могут по-разному быть объединены или исключены, чтобы создать дополнительные варианты осуществления, и такие дополнительные варианты осуществления находятся в пределах объема притязаний и принципов изобретения. Специалистам в данной области техники также будет очевидно, что вышеописанные варианты осуществления могут быть объединены полностью или частично, чтобы создать дополнительные варианты осуществления в пределах объема притязаний и принципов изобретения.
Таким образом, хотя конкретные варианты осуществления и соответствующие примеры изобретения рассмотрены здесь в иллюстративных целях, различные эквивалентные модификации возможны в пределах объема притязаний изобретения, как будет видно специалистам в данной области техники. Представленные принципы могут быть применены к другим измерителям, а не только к описанным выше и показанным на сопровождающих чертежах вариантам осуществления. Соответственно, объем притязаний изобретения должен быть определен из нижеследующей формулы.

Предложен способ для аттестации сборки датчика измерителя. Способ содержит этап приема одного или нескольких значений калибровки датчика. Способ дополнительно содержит этап сравнения принятых значений калибровки датчика с одним или несколькими известными значениями калибровки датчика. Способ может затем аттестовать сборку датчика, если одно или несколько принятых значений калибровки датчика находятся в пределах величины заданного допустимого отклонения одного или нескольких известных значений калибровки датчика. Технический результат - возможность точной и надежной проверки допустимости датчика с использованием информации, заложенной в самом датчике или в сети датчиков. 2 н. и 14 з.п. ф-лы, 4 ил.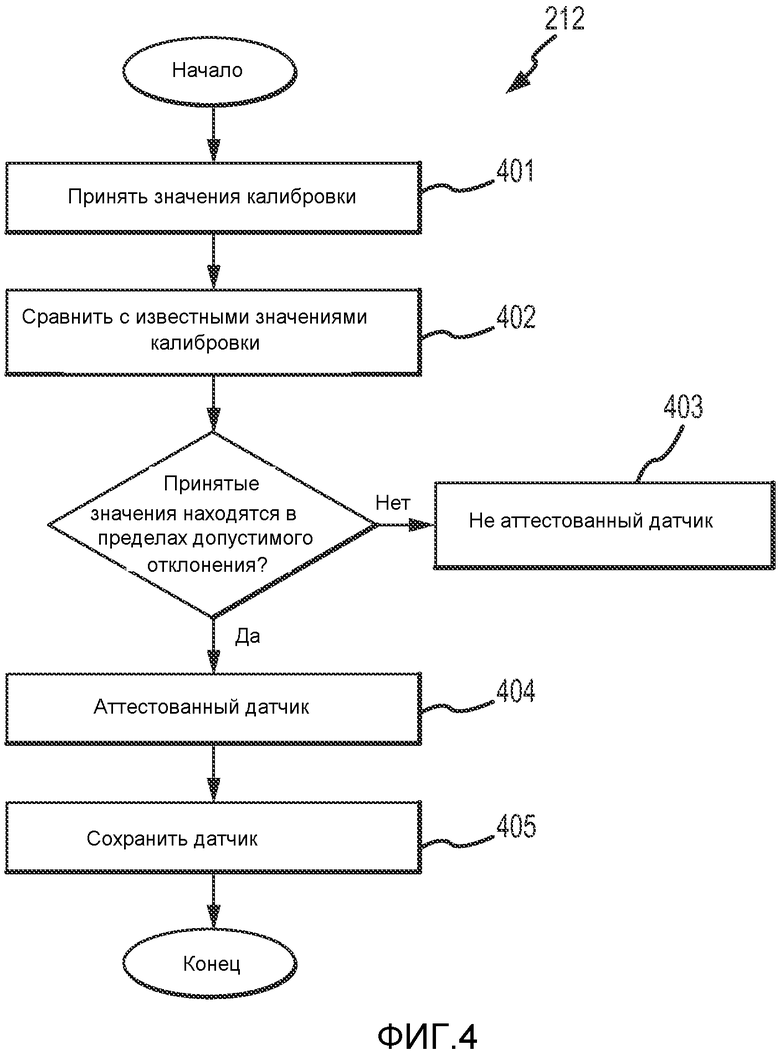
1. Способ для аттестации сборки датчика измерителя путем определения, является ли сборка датчика одним из по меньшей мере одного допустимого типа датчика, причем способ содержит этапы:
приема одного или нескольких значений калибровки датчика;
сравнения принятых значений калибровки датчика с одним или несколькими известными значениями калибровки датчика, причем каждое известное значение калибровки датчика соответствует одному из по меньшей мере одного допустимого типа датчика; и
аттестации сборки датчика, если одно или несколько принятых значений калибровки датчика находятся в пределах заданного допустимого отклонения одного или нескольких известных значений калибровки датчика, соответствующих одному из по меньшей мере одного допустимого типа датчика.
2. Способ по п. 1, дополнительно содержащий этап неаттестации сборки датчика, если одно или несколько принятых значений калибровки датчика превышают известные значения калибровки датчика больше чем на величину заданного допустимого отклонения.
3. Способ по п. 2, дополнительно содержащий этап недопущения для электронного измерителя для измерителя, связанного со сборкой датчика, работы со сборкой датчика, если сборка датчика не аттестована.
4. Способ по п. 1, дополнительно содержащий этап идентификации типа датчика для сборки датчика на основании сравнения принятых значений калибровки датчика и известных значений калибровки датчика.
5. Способ по п. 4, дополнительно содержащий этап сохранения идентифицированного типа датчика наряду с идентификатором датчика.
6. Способ по п. 1, в котором одно из одного или нескольких принятых значений калибровки датчика содержит Калибровочный Коэффициент Расхода (FCF).
7. Способ по п. 1, в котором одно из одного или нескольких принятых значений калибровки датчика содержит значение невозмущенной гармонической частоты (Kl).
8. Способ по п. 1, в котором сборка датчика содержит составляющую часть датчика расходомера Кориолиса.
9. Электронный измеритель (20) для измерителя (5), включающего в себя сборку (10) датчика, причем электронный измеритель (20) включает в себя систему (203) обработки, сконфигурированную для
приема одного или нескольких значений (215, 216) калибровки датчика;
сравнения принятых значений (215, 216) калибровки датчика с одним или несколькими известными значениями (213) калибровки датчика, причем каждое известное значение калибровки датчика соответствует одному из по меньшей мере одного допустимого типа датчика; и
аттестации сборки (10) датчика как одного из по меньшей мере одного допустимого типа датчика путем определения, если одно или несколько принятых значений (215, 216) калибровки датчика находятся в пределах заданного допустимого отклонения одного или нескольких известных значений калибровки датчика (213), соответствующих по меньшей мере одному допустимому типу датчика.
10. Электронный измеритель (20) по п. 9, в котором система (203) обработки дополнительно сконфигурирована для неаттестации сборки (10) датчика, если одно или несколько принятых значений (215, 216) калибровки датчика превышают известные значения (213) калибровки датчика больше чем на величину заданного допустимого отклонения.
11. Электронный измеритель (20) по п. 10, в котором система (203) обработки данных дополнительно сконфигурирована для недопущения работы электронного измерителя (20) со сборкой датчика (10), если сборка датчика (10) не аттестована.
12. Электронный измеритель (20) по п. 9, в котором система (203) обработки данных дополнительно сконфигурирована для идентификации типа датчика сборки (10) датчика на основании сравнения принятых значений (215, 216) калибровки датчика и известных значений (213) калибровки датчика.
13. Электронный измеритель (20) по п. 12, в котором система (203) обработки данных дополнительно сконфигурирована для сохранения идентифицированного типа датчика (214) наряду с идентификатором датчика.
14. Электронный измеритель (20) по п. 9, в котором одно из одного или нескольких принятых значений калибровки датчика содержит Калибровочный Коэффициент Расхода (FCF).
15. Электронный измеритель (20) по п. 9, в котором одно из одного или нескольких принятых значений калибровки датчика содержит значение невозмущенной гармонической частоты (Kl).
16. Электронный измеритель (20) по п. 9, в котором сборка датчика содержит составляющую часть датчика расходомера Кориолиса.
| US 5907104 A, 25.05.1999 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ИДЕНТИФИКАЦИЯ ТИПА РАСХОДОМЕРА | 2003 |
|
RU2323418C1 |

