Изобретение относится к области измерительной техники, а конкретно - к средствам топогеодезического обеспечения, и может быть использовано для повышения точности определения углов наклона специализированного мобильного объекта относительно его продольной и поперечной осей в ходе геодезических работ, например, при описании профиля горных дорог и определении наиболее опасных участков на них, а также для оценки рельефа картографируемой местности при топогеодезических работах.
Известен датчик наклона [1. RU 15603 от 09.06.2000 г.], содержащий корпус, в котором подвешен маятник с магнитами, и размещен датчик Холла таким образом, что магниты расположены на свободном конце маятника разноименными полюсами навстречу друг другу с некоторым зазором, корпус выполнен в виде полого цилиндра, заполненного демпфирующей жидкостью, с крышкой и основанием, а датчик Холла помещен в зазоре между магнитами.
Известен датчик угла наклона [2. SU 1364876 от 30.01.1984 г.], содержащий установленный на валу резервуар с кольцеобразной полостью, заполненной жидкостью, помещенный в нее поплавок таким образом, что образует дросселирующие каналы со стенками резервуара, и вставки с зазорами относительно стенок полости.
Недостатком известных датчиков угла наклона является возможность определения угла наклона только в одной плоскости - в плоскости плоской подвески маятника в первом известном датчике [1], и в плоскости кольцеобразной полости резервуара - во втором известном датчике [2], то есть оба известных датчика не позволяют одновременно определять углы крена и тангажа.
Наиболее близким заявляемому изобретению, взятым за прототип, является малогабаритное устройство измерения углов наклона и азимута [3. RU 68672 от 04.07.2007 г.], в котором угол наклона объекта к плоскости горизонта измеряется датчиком, выполненным в виде шарообразного корпуса-резервуара, заполненного жидкостью, а азимут измеряется с помощью магнитной стрелки, свободно плавающей внутри резервуара на поверхности жидкости. На концах и на поперечной оси магнитной стрелки установлены малогабаритные источники света. Снаружи резервуара размещена матрица или линейки фотоприемников (фоторезисторов). Устройство представляет собой совмещенные датчики горизонта и направления. Уровень жидкости соответствует плоскости горизонта. При наклонах объекта источники света, освещают фотоприемники, соответствующие текущему значению угла наклона объекта. Магнитная стрелка расположена на поверхности жидкости и всегда направлена на «север». При повороте объекта относительно данного направления поворачивается и корпус устройства с размещенными на нем фотоприемниками. При этом фотоприемники линейки перемещаются относительно магнитной стрелки и фиксируют угловое отклонение объекта.
Недостатками прототипа является сложность конструкции за счет наличия не менее четырех источников оптического излучения, а также возможность определения углов крена и тангажа относительно только одного направления - на «север», которые не соответствуют истинным углам крена и тангажа мобильного объекта при несовпадении продольной оси объекта с направлением на «север».
Задачей изобретения является повышение точности определения угловой ориентации мобильного объекта относительно местной вертикали в продольной (тангаж) и поперечной (крен) плоскостях в движении.
Технический результат достигается тем, что в датчик углов крена и тангажа, представляющий собой шарообразный корпус-резервуар, наполовину заполненный оптически прозрачной жидкостью, введены функционально и конструктивно связанные чувствительный элемент (поплавок) со светоотражающей нижней поверхностью, фотоприемная матрица и источник оптического излучения, размещенный в центре фотоприемной матрицы, а также вычислительное устройство, при этом корпус-резервуар выполнен в виде полого шара, а чувствительный элемент выполнен в виде диска, нижняя поверхность которого является отражающей для заданного диапазона оптического излучения, корпус-резервуар заполнен оптически прозрачной жидкостью таким образом, что нижняя - отражающая - поверхность поплавка проходит через центр корпуса-резервуара, источник и приемник оптического излучения установлены в нижней части корпуса, а определение величины углов крена и тангажа выполняется вычислительным устройством в зависимости от положения проекции отраженного поплавком оптического луча на фотоприемной матрице. При этом с целью повышения точности определения углов крена и тангажа в вычислительное устройство с датчиков ускорений вводятся данные о линейных ускорениях мобильного объекта в продольном и в боковом направлениях, что обеспечивает исключение погрешностей определения углов тангажа и крена при поворотах и ускорениях мобильного объекта; для привязки данных по углам крена и тангажа к координатам местности в вычислительное устройство вводятся текущие координаты мобильного объекта из навигационного модуля; предупреждение оператора (водителя) о достижении мобильным объектом критических углов крена и тангажа (например, на крутых склонах или сильно пресеченной местности) вычислительное устройство датчика выдает электрический сигнал на срабатывание звуковой сигнализации, которая прекращается при возврате углов в диапазон некритических значений.
Датчик тангажа и крена представлен на чертежах:
фиг. 1 - схема взаимного расположения элементов конструкции устройства;
фиг. 2 - системы координат мобильного объекта: (связанная) подвижная X1Y1Z1 и нормальная (неподвижная) XYZ;
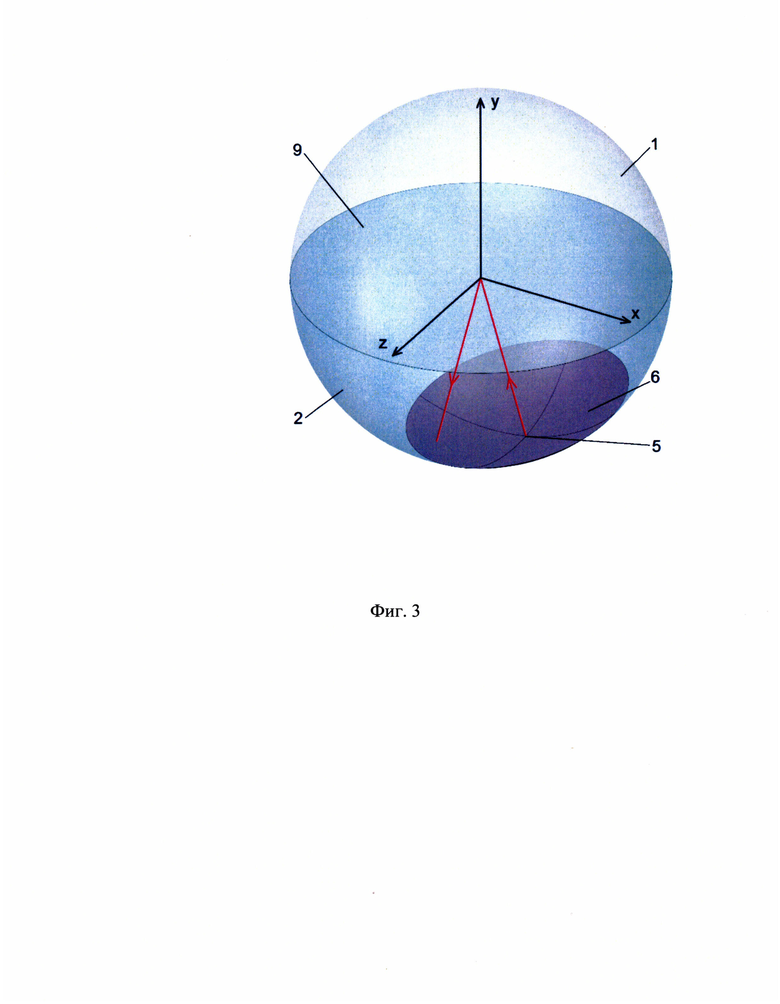
фиг. 3 - общий вид измерения углов крена и тангажа.
Конструкция заявляемого датчика углов крена и тангажа изображена на фигуре 1, где использованы следующие обозначения: 1 - корпус-резервуар; 2 - жидкость; 3 - поплавок; 4 - отражающая поверхность поплавка; 5 - источник оптического излучения; 6 - приемник оптического излучения; 7 - вычислительное устройство; 8 - местная вертикаль; 9 - плоскость горизонта, при этом луч от источника оптического излучения 5, попадает на нижнюю часть поплавка 3 и, отражаясь от поверхности 4, попадает на приемник оптического излучения 6, который световой поток преобразует в электрический сигнал, приходящий в вычислительное устройство 7, которое и формирует данные по углам крена и тангажа относительно угла смещения луча источника излучения от местной вертикали.
Устройство работает следующим образом. Отсчетной системой координат является нормальная (неподвижная) система координат XYZ, в которой ось OY является местной вертикалью и перпендикулярна горизонтальной плоскости (фиг.2). При этом в начальный момент времени ось ОХ совпадает с продольной осью мобильного объекта, а ось OZ совпадает с поперечной осью мобильного объекта. Мобильный объект, на котором размещен датчик углов крена и тангажа, связан с подвижной системой координат X1Y1Z1. Центры подвижной и неподвижной систем совпадают. Объект, а следовательно, и подвижная система координат, может перемещаться относительно отсчетной горизонтальной плоскости по углам крена ±γ (плоскость Z1OY1) и углам тангажа ±υ (плоскость X1OY1). Величины этих углов будут равны углам отклонений луча источника оптического излучения от местной вертикали.
В начальный момент оси неподвижной и подвижной, связанной с мобильным объектом, систем координат совпадают и направление сфокусированного в центр корпуса-резервуара луча источника оптического излучения, выполненного в виде, например, светодиода, совпадает с местной вертикалью 8, нижняя поверхность 4 поплавка 3 совпадет с плоскостью 9 горизонта, а угол между лучом источника излучения 5 (или лучом отраженного сигнала, попадающего на приемник 6) и местной вертикалью 9, будет равен нулю (углы крена и тангажа также будут равны нулю).
При движении мобильного объекта подвижная система координат будет менять свое угловое положение относительно неподвижной системы, и жестко связанный с подвижной системой координат датчик углов крена и тангажа также будет менять свое угловое положение относительно местной вертикали. Соответственно, будут менять свое угловое положение относительно местной вертикали все геометрические точки, расположенные внутри полости шара, в том числе точки расположения источника излучения и фотоприемной матрицы, отклоняясь от местной вертикали на один и тот же угол. В то же время поплавок датчика останется в горизонтальном положении и будет перпендикулярен местной вертикали при любых угловых перемещениях датчика.
Угловые перемещения источника излучения и фотоприемной матрицы относительно местной вертикали возможны в продольной и в поперечной плоскостях (см. фиг.2) по углу тангажа (угол между осями ОХ и OX1) и по углу крена (угол между осями OZ и OZ1). Соответственно, за счет отклонения от местной вертикали зеркально отраженный поверхностью поплавка луч от источника излучения в точке, совпадающей с центром шара корпуса-резервуара и попадающий на фотоприемную матрицу, также может характеризовать величины углов крена и тангажа, так как каждый элемент фотоприемной матрицы связан с величинами углов тангажа и крена (см. фиг. 3).
Электрический сигнал с выхода приемника 6 фотоприемной матрицы поступает в вычислительное устройство 7, в котором регистрируется положение центра отраженного сигнала оптического излучения, угловые координаты которого будут соответствовать углам крена и тангажа. Изменения проекции луча отраженного сигнала на фотоприемную матрицу будут соответствовать приращениям углов крена и тангажа.
Размещенная внутри полости корпуса фотоприемная матрица, состоящая из светочувствительных элементов с размером пикселя, например, 12 мкм, в горизонтальной плоскости имеет форму круга. Плотность пикселей по всей площади матрицы одинаковая. Каждый пиксель матрицы соответствует строго определенным величинам углов крена и тангажа.
Уменьшение размера пикселя (менее 12 мкм), с одной стороны, снижает светочувствительность матрицы и, с другой стороны, повышает уровень шумов. Отраженный поплавком оптический луч от источника излучения облучает сразу несколько пикселей фотоприемной матрицы. В связи с этим для увеличения точности определения углов крена и тангажа вычислительным устройством производится усреднение электрического сигнала по пятну рассеивания падающего луча и вычисление координат в угловых единицах центра пятна в развернутой в плоскость фотоприемной матрицы, что обеспечивает увеличение точности определения углов тангажа и крена.
Кроме того, с целью повышения точности определения углов крена и тангажа в вычислитель, наряду с данными по углам крена и тангажа, от датчиков ускорений вводятся данные о линейных ускорениях мобильного объекта в продольном и в боковом направлениях (на фигурах не показано), что обеспечивает исключение погрешностей определения углов тангажа и крена при поворотах мобильного объекта и ускорениях при его движении.
Привязка данных по углам крена и тангажа к координатам местности проводится с помощью введения текущих координат мобильного объекта из навигационного модуля в вычислитель (на фигурах не показано).
С целью предупреждения оператора (водителя) о достижении мобильным объектом критических углов крена и тангажа (например, на крутых склонах или сильно пресеченной местности) вычислительное устройство датчика выдает электрический сигнал на срабатывание звуковой сигнализации, которая прекращается при возврате углов в диапазон некритических значений (на фигурах не показано).
Заявляемое изобретение является промышленно применимым в наземных мобильных геодезических комплексах при выполнении топографических и геодезических работ.
Технический результат заключается в обеспечении возможности одновременного определения углов крена и тангажа мобильного объекта и их приращений в движении, в том числе при ускорениях и поворотах мобильного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| СПОСОБ ВНУТРЕННЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2712367C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| ГРАВИМЕТР С ЖИДКИМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 1992 |
|
RU2069880C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2016 |
|
RU2629539C1 |


Изобретение относится к области измерительной техники, а именно к средствам топогеодезического обеспечения. Сущность заявленного изобретения состоит в следующем. В датчик углов крена и тангажа, представляющий собой полый шарообразный корпус-резервуар, наполовину заполненный оптически прозрачной жидкостью, введены чувствительный элемент (поплавок) со светоотражающей нижней поверхностью; фотоприемная матрица, в центре которой размещён источник оптического излучения; вычислительное устройство. При этом поплавок выполнен в виде диска, нижняя поверхность которого является отражающей для заданного диапазона оптического излучения. Корпус-резервуар заполнен оптически прозрачной жидкостью таким образом, что отражающая поверхность поплавка проходит через центр корпуса-резервуара, источник и приемник оптического излучения установлены в нижней части корпуса. Определение величины углов крена и тангажа выполняется вычислительным устройством в зависимости от положения проекции отраженного поплавком оптического луча на фотоприемной матрице. Технический результат заявленного изобретения заключается в обеспечении возможности одновременного определения углов крена и тангажа мобильного объекта и их приращений в движении. 3 з.п. ф-лы, 3 ил.
1. Датчик углов крена и тангажа, представляющий собой корпус-резервуар, наполовину заполненный оптически прозрачной жидкостью, отличающийся тем, что в него введены функционально и конструктивно связанные поплавок, фотоприемная матрица, источник оптического излучения, размещенный в центре фотоприемной матрицы, с выхода которой электрический сигнал поступает в вычислительное устройство, при этом корпус-резервуар выполнен в виде полого шара, а поплавок выполнен в виде диска, размещенного на поверхности жидкости, нижняя поверхность которого является отражающей для заданного диапазона оптического излучения, корпус-резервуар заполнен оптически прозрачной жидкостью таким образом, что плоскость, совпадающая с нижней отражающей поверхностью поплавка, проходит через центр корпуса-резервуара, а источник оптического излучения и фотоприемная матрица установлены в нижней части корпуса, определение углов крена и тангажа выполняется вычислительным устройством посредством регистрации положения центра отражённого сигнала оптического излучения.
2. Датчик углов крена и тангажа по п. 1, отличающийся тем, что для повышения точности определения углов в вычислитель вводят данные о линейных ускорениях в продольном и боковом направлениях с датчиков ускорений.
3. Датчик углов крена и тангажа по п. 1, отличающийся тем, что привязку к координатам местности по углам крена и тангажа осуществляют путем введения в вычислитель координат мобильного объекта от системы глобального спутникового позиционирования.
4. Датчик углов крена и тангажа по п. 1, отличающийся тем, что при достижении мобильным объектом критически допустимых значений углов крена и/или тангажа вычислительное устройство датчика выдает электрический сигнал на срабатывание звуковой сигнализации, которая выключается при возврате углов крена и/или тангажа в диапазон некритических значений.
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| КУРСОГОРИЗОНТ | 1990 |
|
RU2024823C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| US 9581444 B2, 28.02.2017 | |||
| US 6988321 B2, 24.01.2006. | |||

