ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области техники железнодорожного транспорта, и относится к технологиям формирования поезда, в частности к устройству и способу формирования тяжелого грузового поезда и к электроуправляемой пневматической тормозной системе, которые в основном применяются при формировании тяжелых грузовых поездов.
ПРЕДПОСЫЛКИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Перевозка тяжелых грузов является направлением развития железнодорожных грузоперевозок. В настоящее время режим тяжелых грузов для поездов в основном развивается согласно двум приведенным ниже подходам.
(1) Увеличение осевой нагрузки. Однако увеличение осевой нагрузки будет оказывать влияние на рабочие линии поездов и мосты, по которым проходят поезда, в результате чего вложения в строительство железнодорожной инфраструктуры и стоимость технического обслуживания являются высокими.
(2) Увеличение длины состава. Этот подход имеет следующие преимущества: увеличение длины состава является простым и выполнимым, существующее железнодорожное оборудование может быть использовано в полной мере и рабочие линии поездов и мосты, по которым проходят поезда, не будут подвержены влиянию. Однако подход увеличения длины состава также имеет очевидные недостатки. Увеличение длины состава увеличит продольный импульс поезда, в результате чего вероятность разрушения сцепного устройства и случаев схода поездов с рельс будет повышенной, и, таким образом, это влияет на транспортировочную безопасность поездов. Поскольку продольный импульс длинносоставного поезда в основном вызван «асинхронностью» передней и задней частей поезда, вызванной передачей команд пневматического тормоза и медленного расцепления посредством изменения давления в трубе поезда, эта проблема станет все более и более серьезной по мере увеличения длины состава, в результате чего безопасность транспортировки серьезно ухудшается и развитие перевозки тяжелых грузов ограничивается.
В настоящее время, для железнодорожного вагона, синхронное торможение и медленное расцепление всего поезда осуществляется электроуправляемой пневматической тормозной системой (обозначенной далее по тексту как ECP). Системе ECP необходимо собрать точное расположение вагонных узлов, а затем она осуществляет точное управление и анализ ошибок, таким образом улучшая эксплуатационные характеристики и безопасность поезда.
В настоящее время система ECP собирает информацию о формировании поезда путем соединения с переключаемой нагрузкой для подсчета количества импульсов. Однако, в таком случае, длительность формирования является большой, способ формирования является сложным, и тому подобное.
Существующее устройство формирования поезда содержит головной узел (HEU), систему питания системы связи (TPS), хвостовой узел, вагонный узел управления, переключаемую нагрузку и датчик тока для обнаружения тока источника питания вагонной системы управления. Способ формирования является следующим:
1. HEU передает инструкцию формирования в каждый вагон поезда, и все вагоны начинают считать количество импульсов;
2. для каждого вагона (i) (где i=1, …, порядковый номер базы данных хвостового вагона),
(1) HEU обнаруживает, подсоединен ли вагон (i) к нагрузке;
(2) HEU получает информацию, указывающую, что вагон (i) был подсоединен к нагрузке;
(3) вагонный узел управления обнаруживает ток шины поезда с помощью датчика тока, и количество импульсов увеличивается на 1 в случае, если присутствует ток импульса; и
(4) HEU получает информацию, указывающую, что вагон (i) был отсоединен от нагрузки; и
3. HEU передает команду остановки формирования всем вагонам поезда, и все вагоны прекращают отсчитывать количество импульсов.
Например, со ссылкой на примерное устройство для вагонов поезда, показанное на фиг. 1, данный поезд содержит четыре вагона, и HEU в режиме повторения осуществляет процесс составления схемы поезда четыре раза. Во время каждого повторения только один вагон соединяет нагрузку с шиной поезда для обнаружения присутствия или отсутствия тока в каждом вагоне и подсчета количества обнаружений тока. Информация о присутствии или отсутствии тока и количестве обнаружений хранится в «счетчике импульсов» каждого вагона. Количество импульсов поезда представлено в таблице 1. Действительное местоположение каждого вагона основано на значении «счетчика импульсов» и общем количестве сформированных вагонов поезда.
Таблица 1
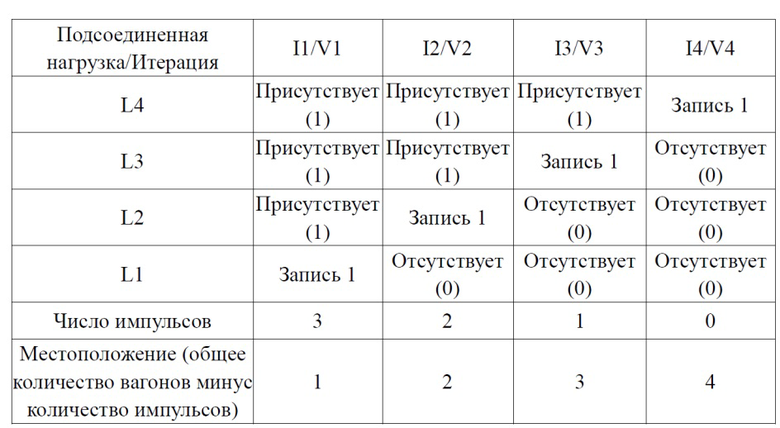
В таблице 1 «Запись 1» обозначает, что количество импульсов не обновлено в вагоне, присоединенном к нагрузке.
Данный подход к формированию поезда может быть осуществлен с помощью существующей шины поезда, представленной в поезде, но необходимо осуществлять переключение источника питания на шину поезда, и подсоединение к переключаемой нагрузке и отсоединение от переключаемой нагрузки необходимо осуществлять в каждом вагоне поезда. Таким образом, способ формирования является сложным и требует длительного времени.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В виду проблем сложного способа формирования, длительного времени формирования и тому подобного при формировании существующего железнодорожного грузового поезда, настоящим изобретением предусмотрены устройство для формирования тяжелого грузового поезда и способ формирования, а также электроуправляемая пневматическая тормозная система, которая реализует простое и быстрое формирование поезда, и при этом при формировании грузового железнодорожного поезда может сократить время формирования поезда, понизить сложность формирования поезда, снизить частоту возникновения ошибок формирования поезда и улучшить надежность формирования поезда.
Для этой цели настоящим изобретением предусмотрено устройство для формирования тяжелого грузового поезда, содержащее головной узел (HEU) и множество вагонных узлов управления, причем HEU связан с каждым из вагонных узлов управления; каждый вагонный узел управления содержит вагонный модуль управления, и модуль позиционирования Бейдоу, и модуль связи, соответственно соединенные с вагонным модулем управления; дополнительно в вагонном узле управления, выступающем в качестве первого транспортного средства, предусмотрен терминал идентификации первого транспортного средства; вагонный модуль управления собирает данные о статусе первого транспортного средства посредством терминала идентификации первого транспортного средства; модуль позиционирования Бейдоу выполнен с возможностью сбора данных о широте и долготе соответствующего вагонного узла управления; и вагонный модуль управления получает, посредством модуля связи, команду, переданную HEU, и передает на HEU и посредством модуля связи данные о широте и долготе вагонного узла управления, считанные с модуля позиционирования Бейдоу, и данные о статусе первого транспортного средства вагонного узла управления.
Также в конструкции устройства для вагонов поезда согласно настоящему изобретению в HEU предусмотрен вычислительный модуль для вычисления расстояния между вагонными узлами управления. Вычислительный модуль выполняет свою вычислительную функцию на основе программирования программного обеспечения, и вычисляет расстояния между вагонными узлами управления путем использования собранных данных о широте и долготе каждого вагонного узла управления. Более конкретно, при вычислении расстояния между любыми двумя вагонными узлами управления, для вычисления могут быть использованы разные расчетные формулы. Расчетные формулы включают без ограничения следующую формулу:
D=R* arccos(siny1siny2+cosy1cosy2cos(x1-x2)), где R – это радиус Земли и его среднее значение составляет 6370 км; долгота и широта одного вагонного узла управления обозначены как x1 и y1 соответственно, и долгота и широта другого вагонного узла управления обозначены как x2 и y2 соответственно; и при этом восточная долгота является положительной величиной, западная долгота является отрицательной величиной, северная широта является положительной величиной, и южная широта является отрицательной величиной. Расстояние между двумя вагонными узлами управления может быть вычислено по этой формуле. Поскольку долгота и широта являются углами, при вычислении значения синуса или косинуса значения долготы и широты должны быть переведены в радианы.
В предпочтительной конструкции устройства для вагонов поезда согласно настоящему изобретению HEU содержит процессор формирования и модуль связи, соединенный с процессором формирования. процессор формирования передает команду на вагонный модуль управления каждого вагонного узла управления соответственно посредством модуля связи. При получении команды вагонный модуль управления считывает данные о широте и долготе вагонного узла управления, собранные модулем позиционирования Бейдоу, и передает на процессор формирования и посредством модуля связи считанные данные о широте и долготе вагонного узла управления и данные о статусе первого транспортного средства вагонного узла управления.
В предпочтительной конструкции устройства для вагонов поезда согласно настоящему изобретению вычислительный модуль предусмотрен в составе процессора формирования, и выполнен с возможностью вычисления расстояния между каждым вагонным узлом управления после того, как процессор формирования получил данные о широте и долготе и данные о статусе первого транспортного средства каждого вагонного узла управления.
В предпочтительной конструкции устройства для вагонов поезда согласно настоящему изобретению процессор формирования передает команду формирования на вагонный модуль управления каждого вагонного узла управления посредством модуля связи.
В предпочтительной конструкции устройства для формирования поезда согласно настоящему изобретению используется беспроводная связь или проводная связь между модулем связи HEU и модулем связи каждого вагонного узла управления, и беспроводная связь или проводная связь реализована между модулями связи вагонных узлов управления.
Для этой цели настоящим изобретением дополнительно предусмотрен способ формирования тяжелого грузового поезда, в котором формирование реализовывают с помощью устройства для формирования тяжелого грузового поезда, и который включает следующие этапы:
(1) запись общего количества вагонных узлов управления как M, статуса первого транспортного средства вагонного узла управления, выступающего в качестве первого транспортного средства, как «ИСТИННЫЙ», а статуса первого транспортного средства остальных вагонных узлов управления как «НЕДЕЙСТВИТЕЛЬНЫЙ»;
(2) передача посредством головного узла (HEU) команд формирования на все вагонные узлы управления посредством модуля связи и переключение HEU в режим формирования поездов;
(3) ответ на команду формирования для вагонного модуля управления каждого вагонного узла управления; сбор, с помощью модуля позиционирования Бейдоу, данных о широте и долготе вагонного узла управления, и сбор, путем обнаружения терминала идентификации первого транспортного средства, данных статуса первого транспортного средства вагонного узла управления;
(4) передача от M вагонных узлов управления данных о широте и долготе и данных статуса первого транспортного средства M вагонных узлов управления на HEU посредством модулей связи с образованием массива A[M];
(5) обход HEU массива A[M] для поиска вагонного узла управления  , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», запись местоположения вагонного узла управления
, статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», запись местоположения вагонного узла управления  , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», как Location=1, изъятие вагонного узла управления из массива A[M] и хранение его как FirstUnit, удаление вагонного узла управления из массива A[M], реорганизация с получением массива A[M-1], обозначенного как BaseOrder;
, статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», как Location=1, изъятие вагонного узла управления из массива A[M] и хранение его как FirstUnit, удаление вагонного узла управления из массива A[M], реорганизация с получением массива A[M-1], обозначенного как BaseOrder;
(6) используя FirstUnit в качестве начальной точки, вычисление расстояния от FirstUnit до каждого вагонного узла управления в BaseOrder для обнаружения вагонного узла управления  , характеризующегося минимальным расстоянием от начальной точки, и запись местоположения вагонного узла управления как Location=Location+1;
, характеризующегося минимальным расстоянием от начальной точки, и запись местоположения вагонного узла управления как Location=Location+1;
(7) использование вагонного узла управления в качестве нового FirstUnit, и удаление вагонного узла управления из BaseOrder; и
(8) повторение действий этапов (6) и (7) для успешного определения местоположения остальных M-2 вагонных узлов управления, пока BaseOrder не станет пустым, в результате чего формирование тяжелых грузовых поездов завершается.
В предпочтительном исполнении способа формирования поездов согласно настоящему изобретению, полученное расстояние от FirstUnit до каждого вагонного узла управления в BaseOrder образует набор расстояний, и в наборе расстояний производится поиск вагонного узла управления, характеризующегося минимальным расстоянием от начальной точки.
С этой целью настоящим изобретением также предусмотрена электроуправляемая пневматическая тормозная система, предусматривающая ведущий локомотив и множество вагонных единиц, причем каждая вагонная единица состоит из по меньшей мере одного вагона; при этом электроуправляемая пневматическая тормозная система дополнительно содержит устройство для формирования тяжелого грузового поезда; и HEU предусмотрен в ведущем локомотиве, и вагонные узлы управления предусмотрены в вагонных единицах.
В предпочтительной конструкции электроуправляемой пневматической тормозной системы согласно настоящему изобретению каждая вагонная единица состоит из пяти вагонов.
В сравнении с известным уровнем техники настоящее изобретение обладает следующими преимуществами и полезными эффектами.
(1) Устройство для формирования тяжелого грузового поезда, предусмотренное настоящим изобретением, содержит вагонные узлы управления, в которых предусмотрены модули позиционирования Бейдоу, в результате чего данные о широте и долготе (т. е. данные о местоположении) каждого вагонного узла управления собираются с помощью позиционирования Бейдоу; кроме того, терминал идентификации первого транспортного средства предусмотрен в вагонном узле управления, выступающем в качестве первого транспортного средства, и HEU собирает данные о статусе первого транспортного средства путем обнаружения терминала идентификации первого транспортного средства; и вагонным узлам управления требуется только передать собранные данные о местоположении и данные о статусе первого транспортного средства на HEU с помощью модулей связи. Соответственно количество информационных сообщений между вагонными узлами управления и HEU является уменьшенным, сложный способ соединения вагонных узлов управления с переключаемой нагрузкой и отключения от нее не применяется, длительность формирования является сокращенной, и сложность формирования является сниженной.
(2) В устройстве для формирования тяжелого грузового поезда, предусмотренном настоящим изобретением, система управления источником питания и переключаемая нагрузка не используются, отсутствует необходимость в осуществлении переключения источника питания и в присоединении или отсоединении переключаемой нагрузки, и при этом количество точек вероятной неисправности является уменьшенным, в результате чего частота возникновения ошибок формирования поезда является сниженной и надежность формирования является улучшенной.
(3) В устройстве для формирования тяжелого грузового поезда, предусмотренном настоящим изобретением, в модулях связи может быть использована беспроводная связь или проводная связь, в результате чего оно является привычным в использовании, диапазон применений является широким, зависимость устройства для формирования тяжелого грузового поезда от шин поезда и кабелей является сниженной, и режим связи тяжелого грузового поезда является расширенным.
(4) В способе формирования тяжелого грузового поезда, предусмотренном настоящим изобретением, данные о местоположении и данные о статусе первого транспортного средства каждого вагонного узла управления соответственно собираются с помощью позиционирования Бейдоу и посредством обнаружения терминала идентификации первого транспортного средства для образования массива для вагонного узла управления. HEU совершает обход всего массива, чтобы найти вагонный узел управления, статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», и местоположение вагонного узла управления, статус первого транспортного средства которого помечено как «ИСТИННЫЙ», записывается как 1. Путем вычисления расстояния от вагонного узла управления в местоположении 1 до каждого из остальных вагонных узлов управления обнаруживается вагонный узел управления, характеризующийся минимальным расстоянием от вагонного узла управления в местоположении 1, и местоположение этого вагонного узла управления записывается как 2. Таким образом успешно собираются местоположения всех остальных вагонных узлов управления, и формирование поезда завершается. Соответственно сложный способ соединения каждого вагонного узла управления с переключаемой нагрузкой и отсоединения от нее каждого вагонного узла управления не используется. Способ формирования поезда упрощается, и управляемость и безопасность эксплуатации поезда улучшаются.
(5) В способе формирования тяжелого грузового поезда, предусмотренном настоящим изобретением, в связи с низкими требованиями к источнику питания поезда, сложность системы может быть снижена и стабильность системы поезда может быть улучшена.
(6) В электроуправляемой пневматической тормозной системе, предусмотренной настоящим изобретением, на основе реализации синхронного торможения и медленного расцепления, поскольку электроуправляемая пневматическая тормозная система содержит устройство для формирования тяжелого грузового поезда, причем устройство для формирования тяжелого грузового поезда получает информацию о формировании вагонных узлов управления с помощью системы спутникового позиционирования Бэйдоу и путем обнаружения терминала идентификации первого транспортного средства, может быть получено точное местоположение вагонных узлов управления, могут быть осуществлены точное управление и анализ ошибок, и могут быть улучшены эксплуатационные характеристики и безопасность эксплуатации поезда. В то же время при формировании, поскольку устройство для формирования тяжелого грузового поезда не производит переключение источника питания и подсоединение или отсоединение от переключаемой нагрузки, длительность формирования является сокращенной, сложность формирования является сниженной, и проблемы длительного времени формирования и сложного способа формирования, присутствующие в уровне техники, являются решенными.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
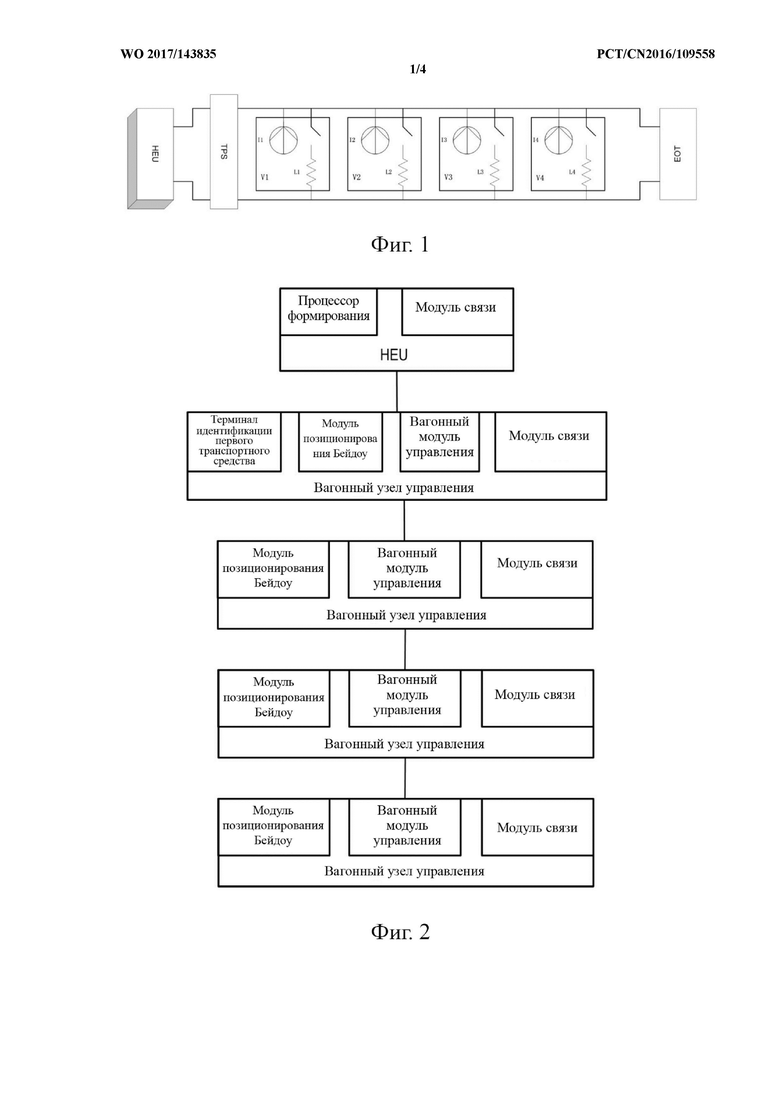
Фиг. 1 представляет собой структурную схему устройства для формирования поезда в соответствии с текущим уровнем техники;
фиг. 2 представляет собой структурную схему устройства для формирования тяжелого грузового поезда согласно варианту осуществления 1 настоящего изобретения;
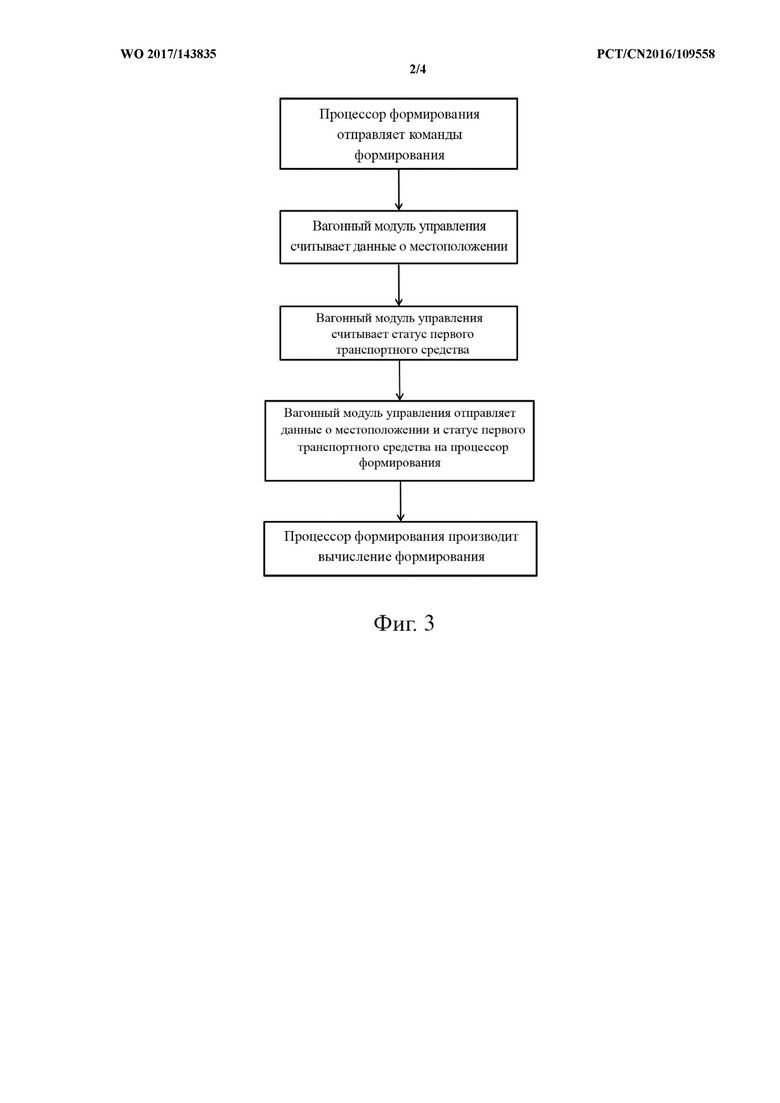
фиг. 3 представляет собой схему способа формирования для устройства для формирования тяжелого грузового поезда согласно варианту осуществления 1 настоящего изобретения;
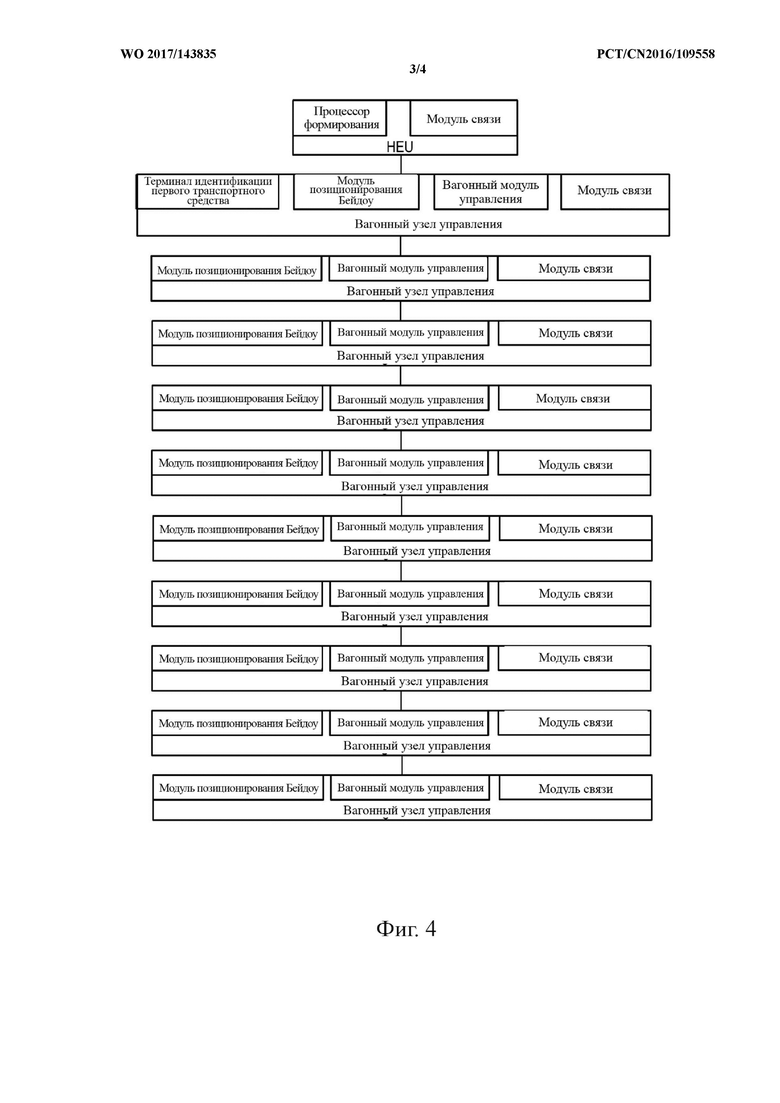
фиг. 4 представляет собой структурную схему устройства для формирования тяжелого грузового поезда согласно варианту осуществления 5 настоящего изобретения; и
фиг. 5 представляет собой блок-схему формирования с помощью процессора формирования способом формирования тяжелого грузового поезда согласно варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение будет подробно описано ниже в соответствии с приведенными в качестве примера вариантами осуществления. Однако следует понимать, что элементы, конструкции и признаки одного варианта осуществления могут быть преимущественным образом реализованы в других вариантах осуществления в пределах объема изобретения. В дополнение, термины «первый», «второй», «третий», «четвертый», «пятый» и «одиннадцатый» являются сугубо описательными, и не могут быть расценены как относительно значимые признаки в плане указания или осуществления.
Вариант осуществления 1. Как показано на фиг. 2, этот вариант осуществления предусматривает устройство для формирования тяжелого грузового поезда, содержащее головной узел (HEU) и четыре вагонных узла управления. HEU связан с каждым из вагонных узлов управления, и каждый из вагонных узлов управления содержит вагонный модуль управления, модуль позиционирования Бейдоу и модуль связи. Четыре вагонных узла управления представляют собой первый вагонный узел управления, второй вагонный узел управления, третий вагонный узел управления и четвертый вагонный узел управления соответственно. Первый вагонный узел управления содержит первый вагонный модуль управления, и первый модуль позиционирования Бейдоу и первый модуль связи, оба из которых соединены с первым вагонным модулем управления. Первый модуль позиционирования Бейдоу выполнен с возможностью сбора данных о широте и долготе первого вагонного узла управления. Второй вагонный узел управления содержит второй вагонный модуль управления, и второй модуль позиционирования Бейдоу и второй модуль связи, оба из которых соединены со вторым вагонным модулем управления. Второй модуль позиционирования Бейдоу выполнен с возможностью сбора данных о широте и долготе второго вагонного узла управления. Третий вагонный узел управления содержит третий вагонный модуль управления, и третий модуль позиционирования Бейдоу, и третий модуль связи, оба из которых соединены с третьим вагонным модулем управления. Третий модуль позиционирования Бейдоу выполнен с возможностью сбора данных о широте и долготе третьего вагонного узла управления. Четвертый вагонный узел управления содержит четвертый вагонный модуль управления, и четвертый модуль позиционирования Бейдоу и четвертый модуль связи, оба из которых соединены с четвертым вагонным модулем управления. Четвертый модуль позиционирования Бейдоу выполнен с возможностью сбора данных о широте и долготе четвертого вагонного узла управления. Из четырех вагонных узлов управления только один вагонный узел управления используется в качестве первого транспортного средства. Первое транспортное средство может быть любым из первого вагонного узла управления, второго вагонного узла управления, третьего вагонного узла управления и четвертого вагонного узла управления. Терминал идентификации первого транспортного средства дополнительно предусмотрен в вагонном узле управления, выступающем в качестве первого транспортного средства. Вагонный модуль управления каждого вагонного узла управления собирает данные о статусе первого транспортного средства путем обнаружения терминала идентификации первого транспортного средства.
Как показано на фиг. 2, HEU содержит процессор формирования и модуль связи, соединенный с процессором формирования. Модуль связи является пятым модулем связи. процессор формирования передает одну команду на вагонный модуль управления каждого вагонного узла управления соответственно с помощью пятого модуля связи. При получении команды вагонный модуль управления считывает данные о широте и долготе вагонного узла управления, собранные модулем позиционирования Бейдоу, и передает на процессор формирования и посредством модуля связи считанные данные о широте и долготе вагонного узла управления и данные о статусе первого транспортного средства вагонного узла управления.
Для определения местоположения каждого вагонного узла управления, в HEU предусмотрен вычислительный модуль для вычисления расстояния между вагонными узлами управления.
Вычислительный модуль реализован на основе программирования программного обеспечения. При вычислении расстояния между любыми двумя вагонными узлами управления вычисление осуществляется по следующей расчетной формуле:
D=R* arccos(siny1siny2+cosy1cosy2cos(x1-x2)) (1)
где R это радиус Земли, и его среднее значение составляет 6370 км; долгота и широта одного вагонного узла управления обозначены как x1 и y1 соответственно, и долгота и широта другого вагонного узла управления обозначены как x2 и y2 соответственно; и при этом восточная долгота является положительной величиной, западная долгота является отрицательной величиной, северная широта является положительной величиной, и южная широта является отрицательной величиной.
Расстояние между любыми двумя вагонными узлами управления может быть вычислено с помощью вышеприведенной формулы. Поскольку долгота и широта являются углами, при вычислении значения синуса или косинуса значения долготы и широты должны быть переведены в радианы.
Для осуществления передачи информации между HEU и вагонными узлами управления, пятый модуль связи связан с первым модулем связи, вторым модулем связи, третьим модулем связи и четвертым модулем связи по шине поезда.
При формировании, как показано на фиг. 3, процессор формирования передает одну команду формирования на каждый вагонный узел управления соответственно посредством пятого модуля связи; первый вагонный модуль управления, второй вагонный модуль управления, третий вагонный модуль управления и четвертый вагонный модуль управления получают соответственно посредством первого модуля связи, второго модуля связи, третьего модуля связи и четвертого модуля связи команды, переданные пятым модулем связи, и считывают соответственно с первого модуля позиционирования Бейдоу, второго модуля позиционирования Бейдоу, третьего модуля позиционирования Бейдоу и четвертого модуля позиционирования Бейдоу данные о широте и долготе первого вагонного узла управления, второго вагонного модуля управления, третьего вагонного модуля управления и четвертого вагонного модуля управления; первый вагонный модуль управления, второй вагонный модуль управления, третий вагонный модуль управления и четвертый вагонный модуль управления собирают информацию о статусе первого транспортного средства каждого вагонного узла управления путем обнаружения терминала идентификации первого транспортного средства; данные о местоположении и данные о статусе первого транспортного средства каждого вагонного узла управления передаются на процессор формирования посредством модуля связи каждого вагонного узла управления и пятого модуля связи; и процессор формирования производит вычисление и формирование с использованием полученных данных о местоположении и статусе первого транспортного средства для завершения формирования поезда.
Устройство для формирования тяжелого грузового поезда в этом варианте осуществления является применимым для формирования малоразмерного тяжелого грузового поезда. При установке и применении устройства для формирования тяжелого грузового поезда в этом варианте осуществления, HEU устанавливают в ведущем локомотиве, вагонные узлы управления устанавливают в вагоны, и разные вагонные узлы управления устанавливают в разных вагонах.
Вариант осуществления 2. Структурный состав и способ формирования тяжелого грузового поезда устройства для формирования тяжелого грузового поезда, предусмотренного в этом варианте осуществления, являются подобными таковым в варианте осуществления 1. Разница между этим вариантом осуществления и вариантом осуществления 1 заключается в том, что в этом варианте осуществления для осуществления доставки информации между HEU и вагонными узлами управления пятый модуль связи связан с первым модулем связи, вторым модулем связи, третьим модулем связи и четвертым модулем связи соответственно с использованием беспроводной связи. В сравнении с системой связи, использующей шину поезда в варианте осуществления 1, этот вариант осуществления не зависит от шины поезда и кабелей, и модуль связи тяжелого грузового поезда является расширенным.
При формировании поезда с помощью устройства для формирования тяжелого грузового поезда в этом варианте осуществления, способ формирования является таким же, как в варианте осуществления 1.
Устройство для формирования тяжелого грузового поезда в этом варианте осуществления является применимым для формирования малоразмерного тяжелого грузового поезда. При установке и применении устройства для формирования тяжелого грузового поезда в этом варианте осуществления способ установки является таким же, как в варианте осуществления 1.
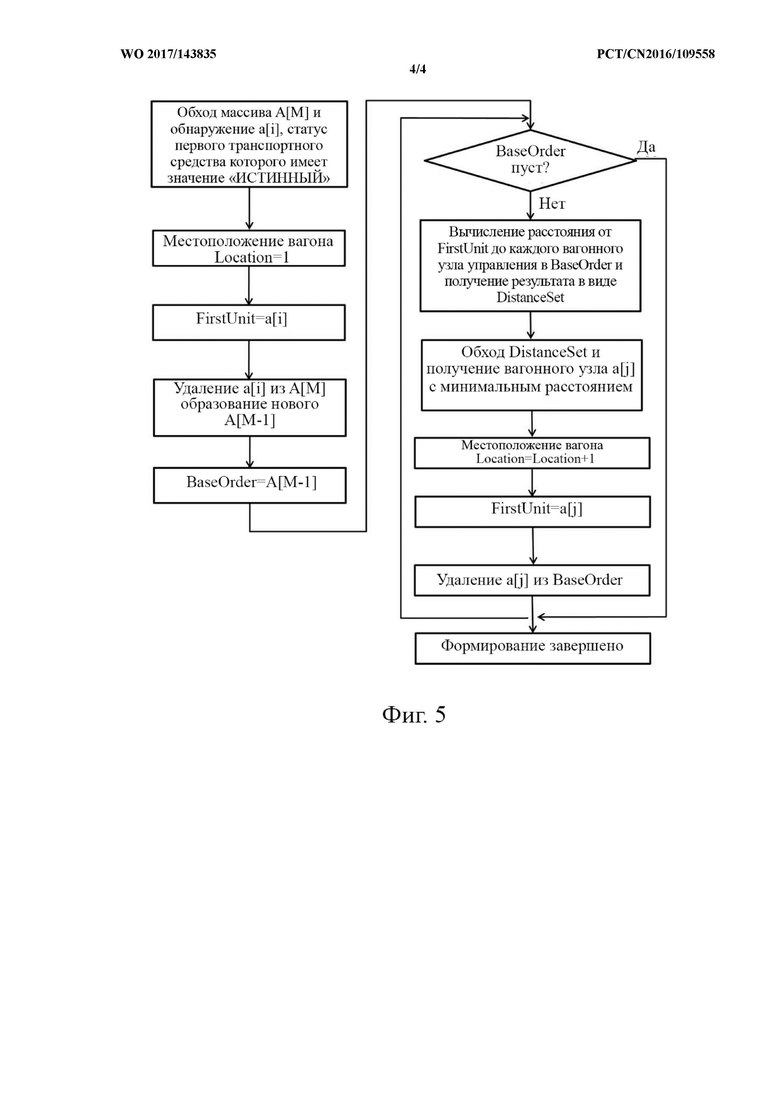
Вариант осуществления 3. Данный вариант осуществления предусматривает способ формирования тяжелого грузового поезда, который реализуется с помощью устройства для формирования тяжелого грузового поезда из варианта осуществления 1 или 2. Со ссылкой на фиг. 5, способ формирования тяжелого грузового поезда включает следующие этапы.
(1) Общее количество вагонных узлов управления записывается как M, причем M=4, статус первого вагона вагонного узла управления, выступающего в качестве первого транспортного средства, записывается как «ИСТИННЫЙ», а статус первого вагона остальных вагонных узлов управления записывается как «НЕДЕЙСТВИТЕЛЬНЫЙ».
(2) процессор формирования передает команды формирования на все вагонные узлы управления с помощью пятого модуля связи, и процессор формирования переключается в режим формирования поезда.
(3) Поездные модули управления четырех вагонных узлов управления отвечают на команды формирования; данные о широте и долготе каждого вагонного узла управления собираются модулем позиционирования Бейдоу каждого вагонного узла управления, и данные о статусе первого вагона каждого вагонного узла управления собираются путем обнаружения терминала идентификации первого транспортного средства.
(4) Четыре вагонных узла управления передают данные о широте и долготе и данные о статусе первого вагона на процессор формирования с помощью пятого модуля связи, образуя массив A[M].
(5) процессор формирования производит обход массива A[M] для поиска вагонного узла управления , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ»; местоположение вагонного узла управления , статус первого вагона которого имеет значение «ИСТИННЫЙ», записывается как 1; вагонный узел управления изымается из массива A[M] и сохраняется как FirstUnit, вагонный узел управления удаляется из массива A[M], и массив A[M] реорганизуется с получением массива A[M-1], который обозначен как BaseOrder.
(6) Используя FirstUnit в качестве начальной точки, расстояние от FirstUnit до каждого вагонного узла управления в BaseOrder вычисляется с образованием набора, обозначенного как Distanceset; производится обход Distanceset и обнаружение вагонного узла управления , характеризующегося минимальным расстоянием от начальной точки, и местоположение этого вагонного узла управления записывается как 2.
(7) Вагонный узел управления  используется в качестве нового FirstUnit, и вагонный узел управления удаляется из BaseOrder.
используется в качестве нового FirstUnit, и вагонный узел управления удаляется из BaseOrder.
(8) Действия этапов (6) и (7) повторяются для успешного определения местоположения остальных двух вагонных узлов управления в местоположениях 3 и 4, следовательно, BaseOrder становится пустым, в результате чего формирование тяжелого грузового поезда завершается.
Более конкретно, на этапе (8), используя вагонный узел управления в местоположении 2 в качестве начальной точки, расстояние от этого вагонного узла управления и двух остальных вагонных узлов управления вычисляется для обнаружения вагонного узла управления, имеющего минимальное расстояние от этого вагонного узла управления. Если местоположение вагонного узла управления, характеризующегося минимальным расстоянием от вагонного узла управления в местоположении 2, равно 3, местоположение последнего вагонного узла управления равно 4.
Способ формирования в этом варианте осуществления является применимым для формирования малоразмерного тяжелого грузового поезда.
Вариант осуществления 4. Этот вариант осуществления предусматривает электроуправляемую пневматическую тормозную систему, содержащую ведущий локомотив и четыре вагонные единицы. Каждая вагонная единица состоит из пяти вагонов. Электроуправляемая пневматическая тормозная система дополнительно содержит устройство для формирования тяжелого грузового поезда согласно варианту осуществления 1 или 2. HEU предусмотрен в ведущем локомотиве, и при этом в каждой вагонной единице предусмотрен один вагонный узел управления.
В этом варианте осуществления реализуется формирование поезда, состоящего из 20 вагонов.
Вариант осуществления 5. Как показано на фиг. 4, этот вариант осуществления предусматривает устройство для формирования тяжелого грузового поезда, содержащее головной узел (HEU) и десять вагонных узлов управления. HEU связан с каждым из вагонных узлов управления, и каждый из вагонных узлов управления содержит вагонный модуль управления, модуль позиционирования и модуль связи. Каждый вагонный узел управления собирает свои данные о широте и долготе с помощью модуля позиционирования. Из десяти вагонных узлов управления только один вагонный узел управления используется в качестве первого транспортного средства. Первое транспортное средство может быть любым из десяти вагонных узлов управления. Терминал идентификации первого транспортного средства дополнительно предусмотрен в вагонном узле управления, выступающем в качестве первого транспортного средства, и вагонный модуль управления каждого вагонного узла управления собирает данные о статусе первого транспортного средства путем обнаружения терминала идентификации первого транспортного средства.
HEU содержит процессор формирования и модуль связи, соединенный с процессором формирования. Модуль связи является одиннадцатым модулем связи. процессор формирования передает одну команду на вагонный модуль управления каждого вагонного узла управления соответственно с помощью одиннадцатого модуля связи. При получении команды вагонный модуль управления считывает данные о широте и долготе вагонного узла управления, собранные модулем позиционирования, и передает на процессор формирования и посредством модуля связи считанные данные о широте и долготе вагонного узла управления и данные о статусе первого транспортного средства вагонных узлов управления.
При формировании поезда с помощью устройства для формирования тяжелого грузового поезда в этом варианте осуществления, способ формирования является таким же, как в варианте осуществления 1.
Устройство для формирования тяжелого грузового поезда в этом варианте осуществления является применимым для формирования среднеразмерного тяжелого грузового поезда. При установке и применении устройства для формирования тяжелого грузового поезда в этом варианте осуществления способ установки является таким же, как в варианте осуществления 1.
Вариант осуществления 6. Данный вариант осуществления предусматривает способ формирования тяжелого грузового поезда, который реализуется с помощью устройства для формирования тяжелого грузового поезда из варианта осуществления 5. Со ссылкой на фиг. 5, способ формирования тяжелого грузового поезда включает следующие этапы.
(1) Общее количество вагонных узлов управления записывается как M, причем M=10, статус первого вагона вагонного узла управления, выступающего в качестве первого транспортного средства, записывается как «ИСТИННЫЙ», а статус первого вагона остальных вагонных узлов управления записывается как «НЕДЕЙСТВИТЕЛЬНЫЙ».
(2) процессор формирования передает команды формирования на все вагонные узлы управления с помощью одиннадцатого модуля связи, и процессор формирования переключается в режим формирования поезда.
(3) Поездные модули управления десяти вагонных узлов управления отвечают на команды формирования; данные о широте и долготе каждого вагонного узла управления собираются модулем позиционирования каждого вагонного узла управления, и данные о статусе первого вагона каждого вагонного узла управления собираются путем обнаружения терминала идентификации первого транспортного средства.
(4) Десять вагонных узлов управления передают данные о широте и долготе и данные о статусе первого вагона на процессор формирования с помощью одиннадцатого модуля связи, образуя массив A[M].
(5) процессор формирования производит обход массива A[M] для поиска вагонного узла управления , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ»; местоположение вагонного узла управления , статус первого вагона которого имеет значение «ИСТИННЫЙ», записывается как Location=1; вагонный узел управления изымается из массива A[M] и сохраняется как FirstUnit, вагонный узел управления удаляется из массива A[M], и массив A[M] реорганизуется с получением массива A[M-1], который обозначен как BaseOrder.
(6) Используя FirstUnit в качестве начальной точки, расстояние от FirstUnit до каждого вагонного узла управления в BaseOrder вычисляется с образованием набора, обозначенного как Distanceset; производится обход Distanceset и обнаружение вагонного узла управления , характеризующегося минимальным расстоянием от начальной точки, и местоположение этого вагонного узла управления записывается как Location=Location+1, т. е. местоположение вагонного узла управления равно 2.
(7) Вагонный узел управления используется в качестве нового FirstUnit, и вагонный узел управления удаляется из BaseOrder.
(8) Действия этапов (6) и (7) повторяются для успешного определения местоположения остальных M-2 вагонных узлов управления, пока BaseOrder не станет пустым, в результате чего формирование тяжелого грузового поезда завершается.
Более конкретно, на этапе (8) остаются восемь вагонных узлов управления, и действия на этапе (6) и (7) повторяются для успешного определения вагонных узлов управления в местоположениях 3, 4, 5, 6, 7, 8, 9 и 10.
Способ формирования в этом варианте осуществления является применимым для формирования среднеразмерного тяжелого грузового поезда.
Вариант осуществления 7. Данный вариант осуществления предусматривает электроуправляемую пневматическую тормозную систему, содержащую ведущий локомотив и десять вагонных единиц. Каждая вагонная единица состоит из шести вагонов. Электроуправляемая пневматическая тормозная система дополнительно содержит устройство для формирования тяжелого грузового поезда согласно варианту осуществления 5. HEU предусмотрен в ведущем локомотиве, и при этом в каждой вагонной единице предусмотрен один вагонный узел управления.
В этом варианте осуществления реализована формирование поезда, состоящего из 60 вагонов.
В качестве дополнения к данным вариантам осуществления, количество вагонных узлов управления в устройстве для формирования тяжелого грузового поезда и количество вагонных единиц в электроуправляемой пневматической тормозной системе при желании может быть выбрано в соответствии с общим числом вагонов тяжелого грузового поезда, и устройство для формирования тяжелого грузового поезда и способ формирования могут применяться для осуществления формирования различных грузовых поездов и являются применимыми для тяжелых грузовых поездов различных размеров.
Приведенные выше варианты осуществления использованы для объяснения настоящего изобретения и не предназначены для ограничения настоящего изобретения. Любые модификации и изменения, произведенные в отношении настоящего изобретения в пределах сути настоящего изобретения и объема правовой охраны прилагаемой формулы изобретения, попадают в объем правовой охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕСУРСОВ В ПРЕДЕЛАХ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2006 |
|
RU2473443C2 |
| Устройство мониторинга и диагностики грузового вагона | 2020 |
|
RU2745168C1 |
| АДАПТЕР И СИСТЕМА РАЗМЕЩЕНИЯ И ДОСТАВКИ ГРУЗА БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2020 |
|
RU2739508C1 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ, МЕСТОНАХОЖДЕНИЯ И СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2419980C2 |
| АВТОМАТИЧЕСКИЙ ИДЕНТИФИКАТОР НОМЕРА ВАГОНА | 2012 |
|
RU2508216C1 |
| СПОСОБ ОБНОВЛЕНИЯ СПУТНИКОВОГО ОТСЛЕЖИВАНИЯ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2020 |
|
RU2789853C1 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ ПРЕДОСТАВЛЕНИЕМ УСЛУГИ | 2015 |
|
RU2682313C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УКЛАДКИ ЖЕЛЕЗНОДОРОЖНОГО БАЛЛАСТА | 2005 |
|
RU2381321C2 |
Изобретение относится к железнодорожной автоматике для формирования грузовых поездов. Устройство содержит головной узел HEU и множество вагонных узлов управления, HEU связан с каждым из вагонных узлов управления; каждый вагонный узел управления содержит вагонный модуль управления и модуль позиционирования Бейдоу и модуль связи, соответственно соединенные с вагонным модулем управления; терминал идентификации первого транспортного средства дополнительно предусмотрен в вагонном узле управления, выступающем в качестве первого транспортного средства. Причем вагонный модуль управления собирает данные о статусе первого транспортного средства посредством терминала идентификации первого транспортного средства; вагонный модуль управления получает команду, переданную HEU, и передает на HEU данные о широте и долготе вагонного узла управления, считанные с модуля Бейдоу, и данные о статусе первого транспортного средства вагонного узла управления. Достигается повышение скорости и упрощение формирования тяжелого грузового поезда. 3 н. и 7 з.п. ф-лы, 5 ил., 1 табл.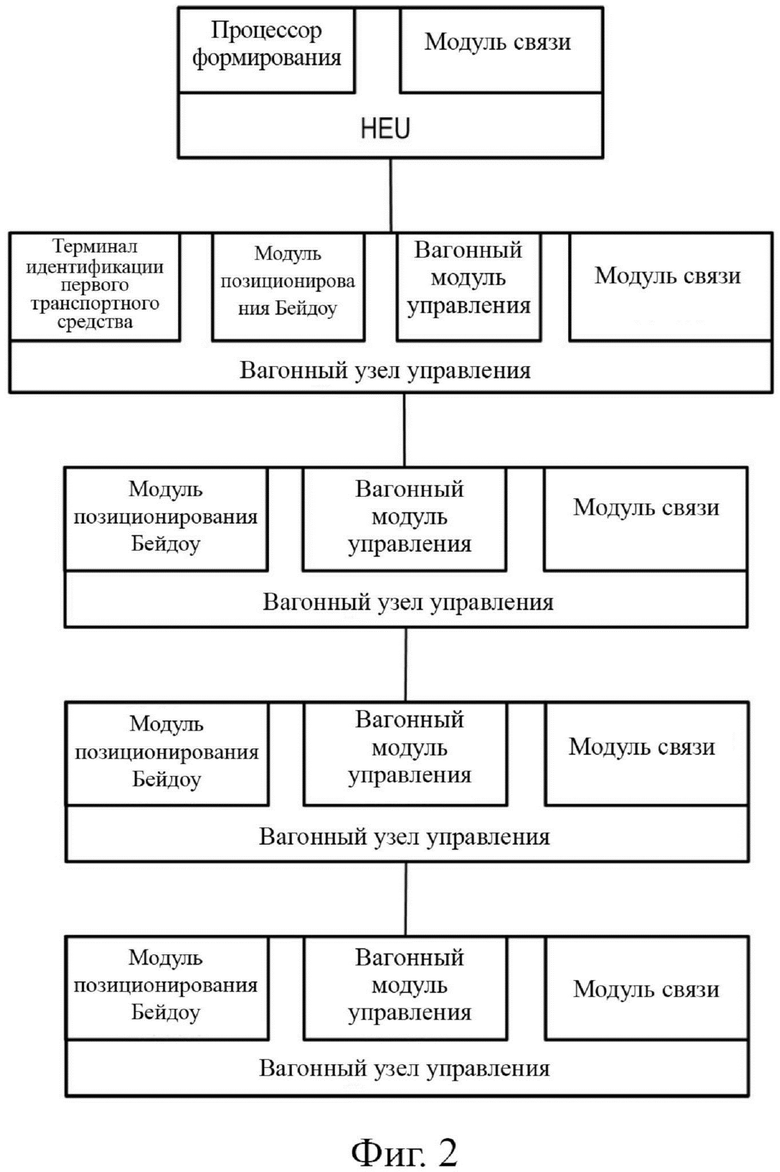
1. Устройство для формирования тяжелого грузового поезда, содержащее головной узел HEU и множество вагонных узлов управления, причем
HEU связан с каждым из вагонных узлов управления;
каждый вагонный узел управления содержит вагонный модуль управления и модуль позиционирования Бейдоу и модуль связи, соответственно соединенные с вагонным модулем управления;
терминал идентификации первого транспортного средства дополнительно предусмотрен в вагонном узле управления, выступающем в качестве первого транспортного средства;
вагонный модуль управления собирает данные о статусе первого транспортного средства посредством терминала идентификации первого транспортного средства;
модуль позиционирования Бейдоу выполнен с возможностью сбора данных о широте и долготе соответствующего вагонного узла управления; и
вагонный модуль управления получает посредством модуля связи команду, переданную HEU, и передает на HEU и посредством модуля связи данные о широте и долготе вагонного узла управления, считанные с модуля позиционирования Бейдоу, и данные о статусе первого транспортного средства вагонного узла управления.
2. Устройство для формирования тяжелого грузового поезда по п. 1, отличающееся тем, что в HEU предусмотрен вычислительный модуль для вычисления расстояния между вагонными узлами управления.
3. Устройство для формирования тяжелого грузового поезда по п. 2, отличающееся тем, что HEU содержит процессор формирования и модуль связи, соединенный с процессором формирования; при этом процессор формирования передает команду на вагонный модуль управления каждого вагонного узла управления соответственно посредством модуля связи; при получении команды вагонный модуль управления считывает данные о широте и долготе вагонного узла управления, собранные с помощью модуля позиционирования Бейдоу, и передает на процессор формирования и посредством модуля связи считанные данные о широте и долготе вагонного узла управления и данные о статусе первого транспортного средства вагонного узла управления.
4. Устройство для формирования тяжелого грузового поезда по п. 3, отличающееся тем, что вычислительный модуль предусмотрен в составе процессора формирования и выполнен с возможностью вычисления расстояния до каждого вагонного узла управления после того, как процессор формирования получил данные о широте и долготе и данные о статусе первого транспортного средства каждого вагонного узла управления.
5. Устройство для формирования тяжелого грузового поезда по п. 3, отличающееся тем, что процессор формирования передает команду формирования на вагонный модуль управления каждого вагонного узла управления посредством модуля связи.
6. Устройство для формирования тяжелого грузового поезда по любому из пп. 3-5, отличающееся тем, что беспроводная связь или проводная связь реализована между модулем связи HEU и модулем связи каждого вагонного узла управления; и беспроводная связь или проводная связь реализована между модулями связи вагонных узлов управления.
7. Способ формирования тяжелого грузового поезда, применяющийся совместно с устройством для формирования тяжелого грузового поезда по любому из пп. 1-6, отличающийся тем, что включает следующие этапы:
(1) запись общего количества вагонных узлов управления как M, статуса первого транспортного средства вагонного узла управления, выступающего в качестве первого транспортного средства, как «ИСТИННЫЙ», а статуса первого транспортного средства остальных вагонных узлов управления как «НЕДЕЙСТВИТЕЛЬНЫЙ»;
(2) передача посредством головного узла (HEU) команд формирования на все вагонные узлы управления посредством модуля связи и переключение HEU в режим формирования поезда;
(3) ответ на команду формирования для вагонного модуля управления каждого вагонного узла управления; сбор, с помощью модуля позиционирования Бейдоу, данных о широте и долготе вагонного узла управления и сбор, путем обнаружения терминала идентификации первого транспортного средства, данных статуса первого транспортного средства вагонного узла управления;
(4) передача от M вагонных узлов управления данных о широте и долготе и данных статуса первого транспортного средства M вагонных узлов управления на HEU посредством модулей связи с образованием массива A[M];
(5) обход HEU массива A[M] для поиска вагонного узла управления  , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ»; запись местоположения вагонного узла управления , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», как Location=1; изъятие вагонного узла управления из массива A[M] и сохранение его как FirstUnit; удаление вагонного узла управления из массива A[M]; реорганизация с получением массива A[M-1], обозначенного как BaseOrder;
, статус первого транспортного средства которого имеет значение «ИСТИННЫЙ»; запись местоположения вагонного узла управления , статус первого транспортного средства которого имеет значение «ИСТИННЫЙ», как Location=1; изъятие вагонного узла управления из массива A[M] и сохранение его как FirstUnit; удаление вагонного узла управления из массива A[M]; реорганизация с получением массива A[M-1], обозначенного как BaseOrder;
(6) используя FirstUnit в качестве начальной точки, вычисление расстояния от FirstUnit до каждого вагонного узла управления в BaseOrder для обнаружения вагонного узла управления  , имеющего минимальное расстояние от начальной точки, и запись местоположения вагонного узла управления как Location=Location+1;
, имеющего минимальное расстояние от начальной точки, и запись местоположения вагонного узла управления как Location=Location+1;
(7) использование вагонного узла управления в качестве нового FirstUnit и удаление вагонного узла управления из BaseOrder; и
(8) повторение действий этапов (6) и (7) для успешного определения местоположения остальных M-2 вагонных узлов управления, пока BaseOrder не станет пустым, с завершением, таким образом, формирования тяжелого грузового поезда.
8. Способ формирования тяжелого грузового поезда по п. 7, отличающийся тем, что полученное расстояние от FirstUnit до каждого вагонного узла управления в BaseOrder образует набор расстояний, и производят поиск вагонного узла управления, имеющего минимальное расстояние от начальной точки, в наборе расстояний.
9. Электроуправляемая пневматическая тормозная система, предусматривающая ведущий локомотив и множество вагонных единиц, причем каждая вагонная единица состоит из по меньшей мере одного вагона, при этом электроуправляемая пневматическая тормозная система дополнительно содержит устройство для формирования тяжелого грузового поезда по любому из пп. 1-6; и при этом HEU предусмотрен в ведущем локомотиве, и вагонные узлы управления предусмотрены в вагонных единицах.
10. Электроуправляемая пневматическая тормозная система по п. 9, отличающаяся тем, что каждая вагонная единица состоит из пяти вагонов.
| CN 104442901 A, 25.03.2015 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| CN 101022985 A, 22.08.2007 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОЕЗДОВ ИЗ ОТДЕЛЬНЫХ ВАГОНОВ | 2005 |
|
RU2460653C2 |

