ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Представленное изобретение относится к системе тяги для гибридных транспортных средств, которая содержит по меньшей мере одну бесступенчатую трансмиссию, относящуюся к типу с тороидальным отношением, описанному в преамбуле основного пункта формулы изобретения, и к способу приведения в действие системы тяги для гибридных транспортных средств.
УРОВЕНЬ ТЕХНИКИ
В области автомашин и области промышленного оборудования известно множество гибридных систем тяги, содержащих двигатель внутреннего сгорания, электрический двигатель, трансмиссию для соединения двигателей с колесами транспортного средства и устройство управления для управления двигателями и трансмиссией.
Среди известных гибридных систем некоторые используют бесступенчатую трансмиссию (CVT - continuously variable transmission) тороидального типа. Обычно, в этих системах тороидальная CVT относится к типу с вибрирующим роликом, направление заряда которого в месте контакта колеблется единым образом с самим роликом. Это представляет собой огромный недостаток, потому что крутящий момент, который может быть передан из этой тороидальной CVT, с увеличением скорости ведущего вала постепенно уменьшается асимптотическим образом и, следовательно, слабо приспособлен к напряжениям, которые поступают из транспортного средства от эндотермического двигателя или от электрического двигателя. Для того, чтобы компенсировать этот типичный недостаток указанной выше существующей тороидальной CVT, некоторые конструкторы были вынуждены реализовать некоторые вспомогательные системы, которые являются очень дорогими и не очень надежными, для ограничения крутящего момента, вводимого в тороидальную CVT, и другие системы для изменения нормального усилия между вращающимися элементами данных тороидальных CVT. В частности, система изменения нагрузки между элементами данных тороидальных CVT предусматривает использование масляного насоса, пропорционального клапана и сложного блока управляющего программного обеспечения. Использование гидравлического насоса является крайне неблагоприятным, потому что это приводит к непрерывному потреблению энергии.
Обычно, в данных существующих гибридных системах тяги электрический двигатель соединен с колесами посредством фиксированного передаточного отношения, вследствие этого, система управления неспособна управлять частотой вращения электрического двигателя независимо от скорости транспортного средства. Это является недостатком общей эффективности транспортного средства, потому что частота вращения электрического двигателя зависит от скорости транспортного средства и, вследствие этого, не может поддерживаться на значении, соответствующем максимальной мощности электрического двигателя.
Кроме того, в тех же самых известных гибридных системах тяги эндотермический двигатель соединен с колесами посредством ряда фиксированных передаточных отношений, следовательно, необходимо использовать сложную систему управления эндотермическим двигателем, которая выполнена с возможностью управления как частотой вращения, так и доставляемым крутящим моментом. Поскольку крутящий момент, доставляемый эндотермическим двигателем, может повреждать тороидальную CVT непосредственно на выходе, это приводит к необходимости взаимодействия и сообщения друг с другом как систем управления, так и системы двигателя, и системы ограничения момента, вводимого в CVT. Сложность данных вспомогательных систем управления неизбежно является источником высоких затрат и ненадежности.
В известных гибридных системах тяги, которые не используют CVT, еще один недостаток является причиной того, что в двигателе внутреннего сгорания применяется редуктор с дискретными передаточными отношениями, что является причиной значительного рассеивания энергии во время этапов зажигания. Кроме того, двигатель внутреннего сгорания должен непрерывно изменять свою частоту вращения для того, чтобы приспосабливаться к условиям движения транспортного средства, действуя таким образом с частотой вращения, соответствующей минимальному конкретному потреблению топлива только в течение ограниченных периодов. Это влечет за собой еще одно снижение общей эффективности транспортного средства.
Кроме того, в известных гибридных системах тяги предусмотрены рабочие условия, обычно при низкой скорости, в которых двигатель внутреннего сгорания находится в нейтральном состоянии или отсоединен от трансмиссии. В этих условиях, колеса транспортного средства получают мощность исключительно от электрического двигателя, который, вследствие этого, соответственно должен иметь избыточные параметры с получаемым в результате увеличением размеров и стоимости.
Для того, чтобы решить задачу, некоторые гибридные системы тяги предусматривают устройство торможения на выходе двигателя внутреннего сгорания для предотвращения рабочих условий с нейтральным действием. Однако, это устройство имеет недостаток рассеивания кинетической энергии каждый раз, когда оно приводится в действие; с получаемым в результате уменьшением общей эффективности транспортного средства.
В других гибридных системах тяги, в которых двигатель внутреннего сгорания всегда соединен с трансмиссией, в указанных выше рабочих условиях при низкой скорости, когда речь идет о полной остановке транспортного средства, элемент трансмиссии, соединенный с двигателем внутреннего сгорания, не включает рабочее состояние, в котором передаточное отношение указанного выше элемента таково, чтобы определять нулевое значение скорости данного элемента. В этих системах, применяется трение для отсоединения эндотермического двигателя от остальной трансмиссии и торможения для остановки указанного выше элемента в указанных выше операциях остановки. Использование трения и торможения приводит к значительному увеличению затрат, потребностей трансмиссии в пространстве и мощности, рассеиваемой без выполнения полезной работы для продвижения транспортного средства.
В этих системах, если используется дополнительное тормозное устройство, которое соединено с колесами транспортного средства, когда транспортное средство выключается, предпочтительно имеется возможность запуска двигателя внутреннего сгорания за счет приведения в действие и вращения электрического двигателя. Фактически, поскольку указанное выше передаточное отношение элемента, соединенного с двигателем внутреннего сгорания, не всегда принимает нулевое значение в каких-либо рабочих условиях, а скорость элемента никогда не бывает нулевой, движение электрического двигателя передается непосредственно в двигатель внутреннего сгорания для того, чтобы его запустить. Однако, данные гибридные системы тяги имеют недостаток в том, что во время этапа замедления транспортного средства часть кинетической энергии транспортного средства неизбежно передается от колес в двигатель внутреннего сгорания посредством соединенного с ним элемента, потому что элемент не всегда принимает нулевое значение для скорости вращения. Как известно, двигатель внутреннего сгорания является нереверсивным и, следовательно, энергия, передаваемая ему во время этапа замедления транспортного средства, полностью рассредоточивается посредством рассеивания, а общая эффективность транспортного средства является неудовлетворительной.
Среди тороидальных CVT, которые имеют некоторые из недостатков, изложенных выше, среди тех, в которых направление вращения вторичного вала и ведущего вала являются противоположными, в частности изложена тороидальная CVT, описанная в патенте EP1061286 A1 Torotrak Dev LTD, озаглавленном «Приводной механизм для бесступенчатой трансмиссии» («Drive mechanism for infinitely variable transmission»). В этой тороидальной CVT направление нагрузки между вращающимися элементами колеблется вместе с вибрацией ролика. Такая геометрия создает значение крутящего момента на вторичном валу, которое постепенно асимптотически уменьшается с увеличением скорости вращения вторичного вала и, следовательно, становится хуже адаптированной к напряжениям, возникающим в самом транспортном средстве, электрическом двигателе и эндотермическом двигателе.
Еще один пример гибридного двигателя, снабженного тороидальной CVT, также описан в международной патентной заявке WO 2008/095116.
WO2011092643 описывает систему тяги для гибридных транспортных средств согласно преамбуле пункта 1.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Решение технической задачи посредством настоящего изобретения состоит в предоставлении системы тяги для гибридных транспортных средств, содержащей по меньшей мере одну новую CVT, которая не имеет редуктора с дискретными передаточными отношениями, трением или тормозами и которая конструктивно выполнена с возможностью преодоления всех недостатков, изложенных со ссылкой на известный предшествующий уровень техники, обеспечивая увеличение общей эффективности транспортного средства во всех условиях работы.
Решение еще одной технической задачи посредством настоящего изобретения состоит в предоставлении способа приведения в действие системы тяги для гибридных транспортных средств, которая функционально выполнена с возможностью обеспечения оптимальной общей эффективности транспортного средства во всех условиях работы.
Данные проблемы и другие задачи, которые будут изложены более ясно ниже, решаются посредством изобретения посредством системы тяги, относящейся к типу, содержащему по меньшей мере одну тороидальную CVT, которая сконструирована в соответствии с приложенной формулой изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества изобретения будут более четко понятны из подробного описания некоторых вариантов осуществления, которые проиллюстрированы посредством неограничивающего примера со ссылкой на приложенные чертежи, на которых:
- фигура 1 представляет собой функциональную схему системы тяги для гибридных транспортных средств, которая содержит по меньшей мере одну тороидальную CVT согласно настоящему изобретению;
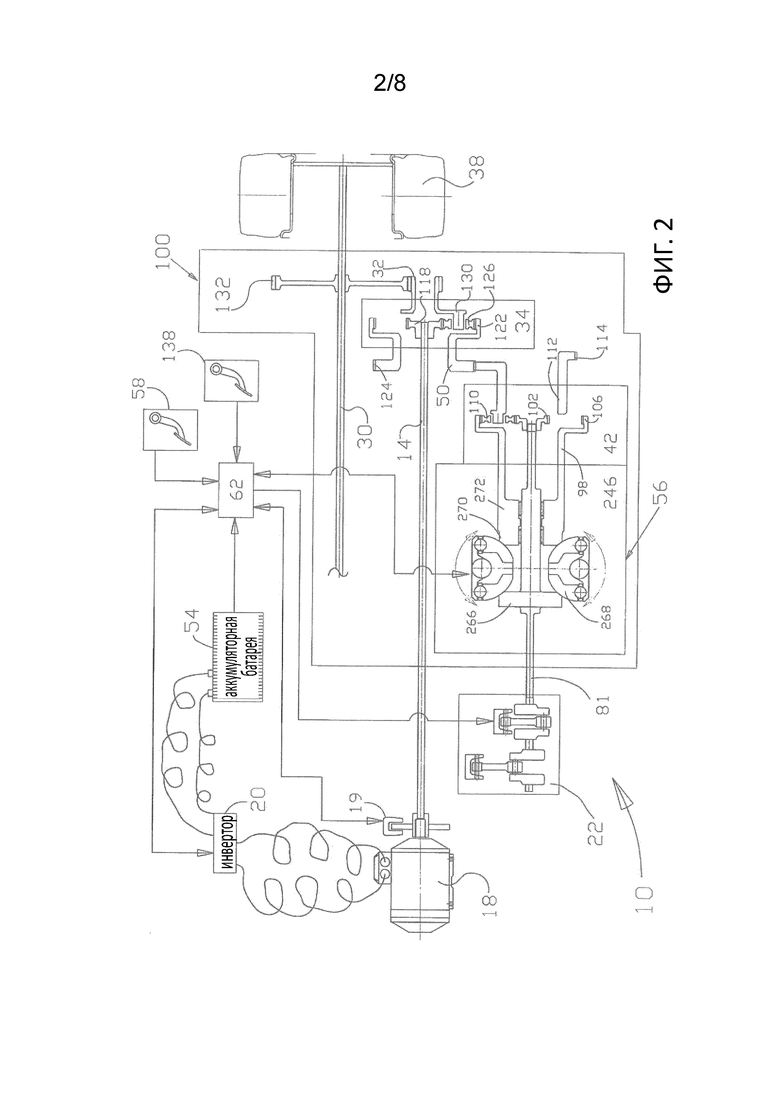
- фигура 2 представляет собой схематичное изображение варианта конструкции системы тяги для гибридных транспортных средств, который содержит по меньшей мере одну тороидальную CVT, при этом относительно фигуры 1 некоторые функции были опущены;
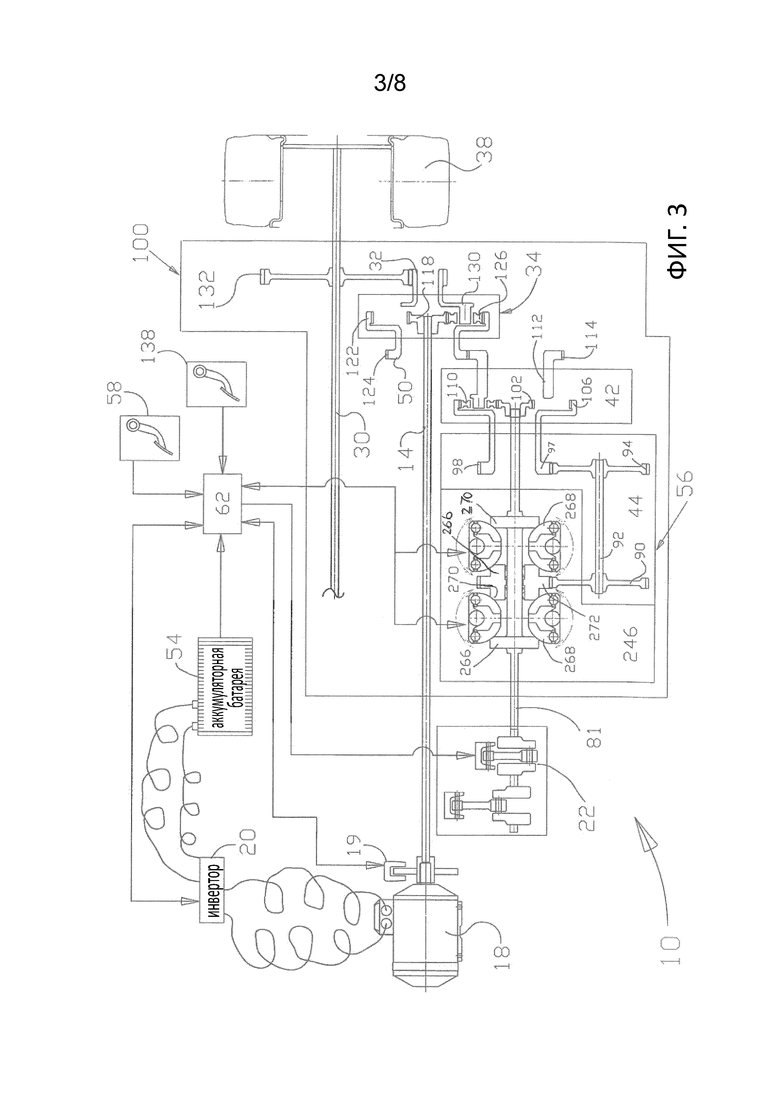
- фигура 3 представляет собой схематичное изображение системы тяги для гибридных транспортных средств, которая содержит по меньшей мере одну тороидальную CVT, согласно настоящему изобретению, которая содержит все функции фигуры 1;
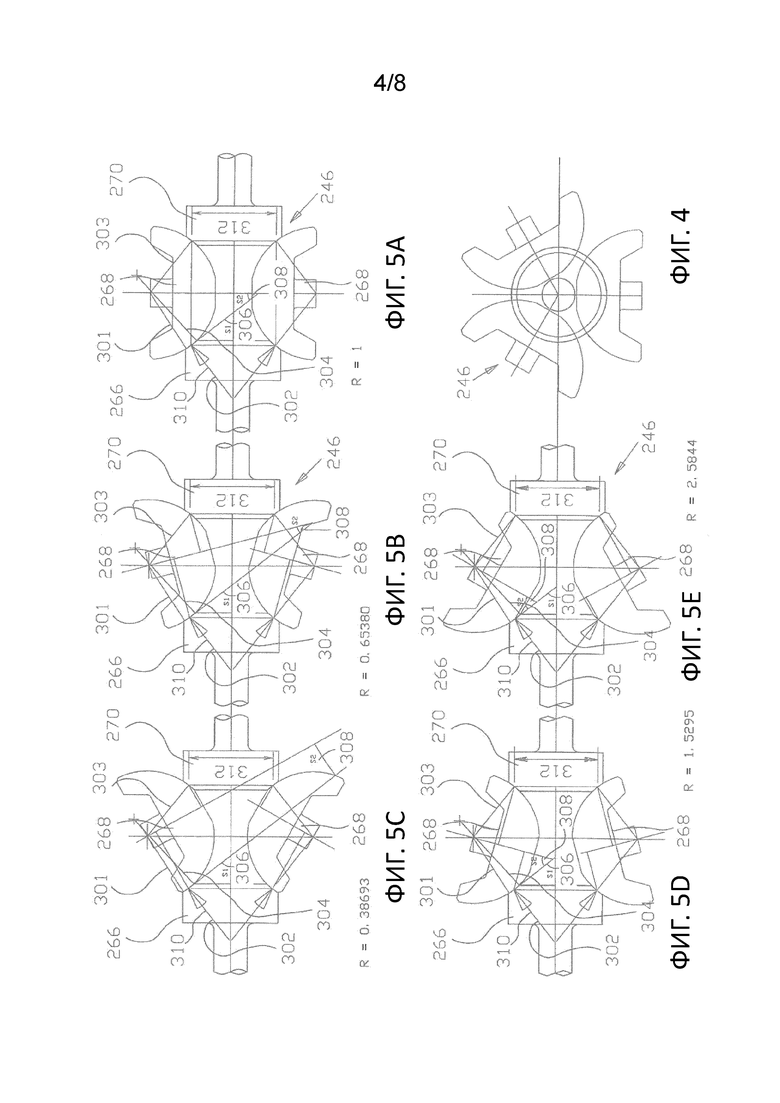
- фигура 4 представляет собой схематичный вид спереди геометрии тороидальной CVT согласно настоящему изобретению;
- фигуры 5A-5E представляют собой схематичные изображения в соответствии с видом сбоку геометрии тороидальной CVT фигуры 3 с различными передаточными отношениями;
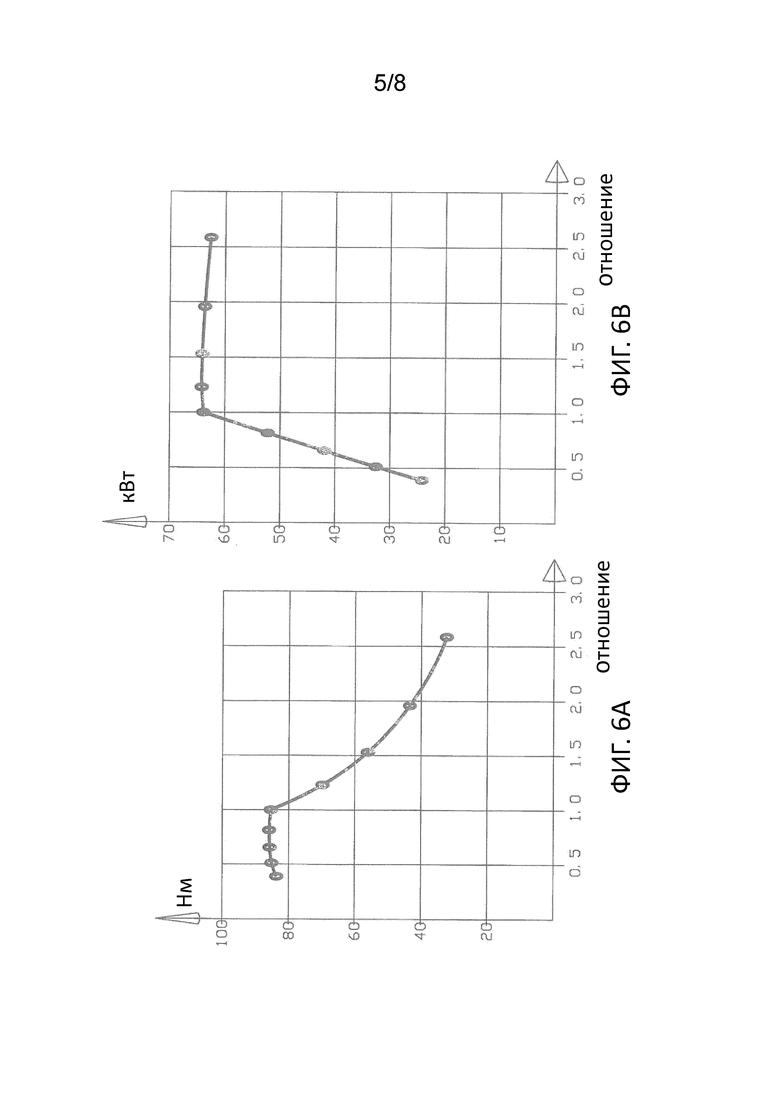
- фигуры 6A и 6B представляют собой два графика, которые иллюстрируют корреляцию между передаваемым крутящим моментом и передаточным отношением и между передаваемой мощностью и передаточным отношением в тороидальной CVT согласно настоящему изобретению, соответственно;
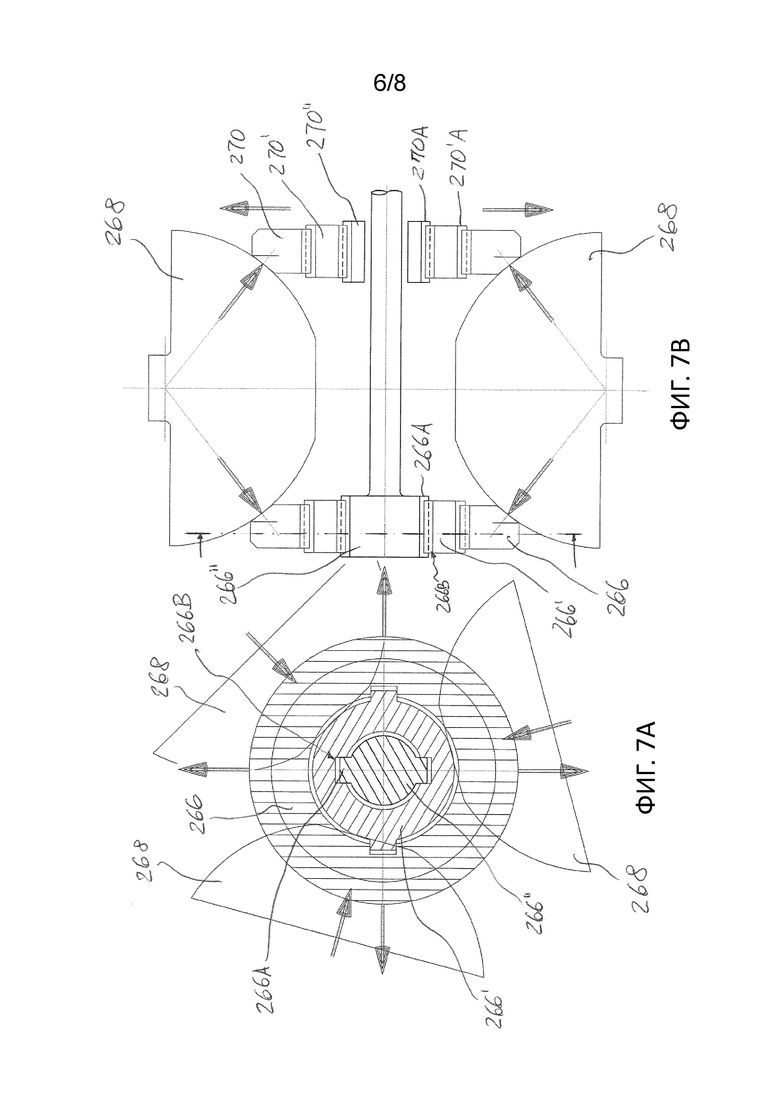
- фигуры 7A и 7B представляют собой схематичный вид спереди и схематичный вид сбоку, соответственно, геометрии тороидальной CVT настоящего изобретения согласно альтернативному варианту осуществления;
- фигуры 8A и 8B представляют собой схематичный вид спереди и схематичный вид сбоку, соответственно, геометрии тороидальной CVT настоящего изобретения согласно дополнительному варианту осуществления;
- фигуры 9A и 9B представляют собой два схематичных частичных вида спереди тороидальной CVT фиг.8A, показывающих CVT в освобожденном состоянии и с приложенным крутящим моментом, соответственно; а
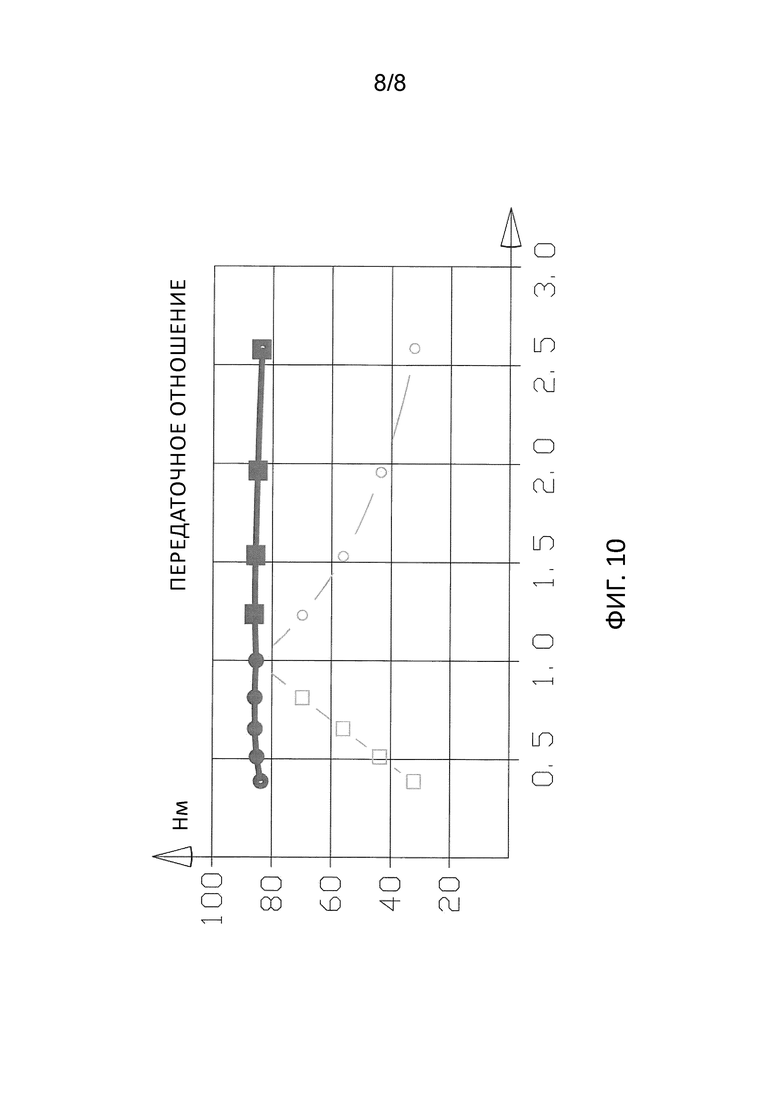
- фигура 10 представляет собой график, который иллюстрирует корреляцию между крутящим моментом, приложенным к первому и второму тороидальным фрикционным дискам, и передаточным отношением согласно настоящему изобретению.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фигурах 1, 2 и 3 система тяги для транспортных средств в общем обозначена позицией 10. Система 10 тяги содержит первый источник 22 мощности, второй источник 18 мощности и трансмиссию 100, которая соединена с первым и вторым источниками 22, 18 мощности.
Первый источник 22 мощности относится к нереверсивному типу и, например, в вариантах конструкции фигур 2 и 3 состоит из двигателя внутреннего сгорания, который соединен с передаточным валом 81 для движения, обеспечиваемого в трансмиссии 100.
В других возможных вариантах конструкции изобретения первый источник 22 мощности состоит из газовой турбины, паровой турбины или другого нереверсивного источника мощности.
Второй источник 18 мощности относится к реверсивному типу и , например, в вариантах конструкции фигур 2 и 3 состоит из электрического двигателя переменного тока, который соединен с трансмиссией 100 посредством ведомого выходного вала 14. В других возможных вариантах конструкции второй источник 18 мощности состоит из электрического двигателя постоянного тока, или из воздушного компрессора или узла двигателя и гидродинамического насоса или любого другого реверсивного источника мощности. Между вторым источником 18 мощности и валом 14 возможно помещен ряд шестерней 26 (только схематично проиллюстрированных на фигуре 1).
Второй источник 18 может быть задействован как для передачи мощности в трансмиссию 100, так и для получения мощности от нее, посредством вала 14. В этом втором способе действия мощность, передаваемая от трансмиссии 100 во второй источник 18, используется для подзарядки аккумулятора 54 энергией.
В вариантах фигур 2 и 3 аккумулятор 54 состоит из батареи, которая электрически соединена с электрическим двигателем 18 посредством инвертора 20, который помещен между ними. На практике электрический двигатель 18 питается от батареи 54 посредством инвертора 20, когда он передает мощность в трансмиссию 100, и работает в качестве электрического генератора, когда он получает мощность от трансмиссии 100, подзаряжая батарею 54.
В других возможных вариантах конструкции аккумулятор 54 выбирают так, чтобы он был совместим со вторым источником 18 мощности. Например, если вторым источником 18 мощности является воздушный компрессор или узел двигателя и гидродинамический насос, будет использоваться гидродинамический аккумулятор.
Трансмиссия 100 содержит первое дифференциальное устройство 34 с первым элементом 50, который соединен с первым источником 22 мощности посредством вариатора 56 скорости, вторым элементом 118, который соединен со вторым источником 18 мощности, и третьим элементом 130, который соединен с осью 30 наземного транспортного средства (не проиллюстрированного).
В других возможных вариантах конструкции первый элемент 50 соединен со вторым источником 18 мощности, тогда как второй элемент 118 соединен с первым источником 22 мощности.
Ось 30 соединена с одним или более ведущими колесами 38.
Каждый из элементов 50, 118 и 130 дифференциала 34 может быть использован как в качестве входа, так и в качестве выхода движения для приема или передачи мощности от вала, с которым он, соответственно, соединен, или на него.
Трансмиссия 100 содержит вариатор 56 скорости, который помещен между первым элементом 50 дифференциала 34 и первым источником 22 мощности. Посредством вариатора 56 скорости можно непрерывным образом изменять передаточное отношение между валом 81 и первым элементом 50 дифференциала 34. Вариатор 56 скорости в своей наиболее полной конфигурации содержит по меньшей мере две передачи 44 и 48, которые соединены параллельно друг другу, коробку передач с бесступенчатым тороидальным регулированием (обозначаемую ниже, как тороидальная CVT для краткости изложения) 246, которая соединена последовательно с передачей 44 и, следовательно, параллельно с передачей 48, и второй дифференциал 42.
Второй элемент 118 соединен непосредственно с валом 14.
Третий элемент 130 содержит наружный зубчатый венец 32, который входит в зацепление с зубчатым колесом 132, которое неподвижно соединено с осью 30.
В примере конструкции фигур 2 и 3 дифференциал 34 относится к эпициклическому типу, в котором первый элемент 50 состоит из коронной шестерни, которая снабжена внутренним зубчатым венцом 122, второй элемент 118 состоит из солнечной шестерни, а третий элемент 130 состоит из несущей сателлиты планетарной передачи, на которой поддерживается с возможностью вращения множество зубчатых планетарных шестерней 126. Планетарные шестерни 126 сцеплены как с внутренним зубчатым венцом 122, так и с шестерней 118.
Указанный дифференциал 34 дополнительно образован первым соединительным элементом 50 между эпициклическим кольцом 122 и двигателем 22 внутреннего сгорания, вторым соединительным элементом 118 между солнечной шестерней и электрическим двигателем 18 и третьим соединительным элементом 130 между несущей сателлиты планетарной передачей самого дифференциала и осью 30, как проиллюстрировано на фигурах 2 и 3.
В возможном варианте конструкции дифференциала 34 (не представленном на фигурах 2 и 3) первый элемент 50 соединен с солнечной шестерней, второй элемент 118 соединен с эпициклическим кольцом 122, а третий элемент 130 соединен с несущей сателлиты планетарной передачей самого дифференциала.
В обоих возможных вариантах конструкции третий элемент 130 соединяет несущую сателлиты планетарную передачу дифференциала 34 с осью 30.
В других возможных вариантах конструкции изобретения дифференциал 34 относится к другому типу конструкции, например, с коническими шестернями или эпициклическими шестернями, имеющими более чем одну ступень.
Для известных свойств эпициклических дифференциалов характерные величины дифференциала 34 связаны отношениями A, B, C, D и E, изложенными ниже:
B) Z118N118+Z122N50=(Z118+Z122)N130,
где:
Z118 представляет собой количество зубьев шестерни 118,
Z122 представляет собой количество зубьев внутреннего зубчатого венца 122,
N118 представляет собой скорость вращения солнечной шестерни 118 и вала 14,
N50 представляет собой скорость вращения коронной шестерни 50,
N130 представляет собой скорость вращения несущей сателлиты планетарной передачи 130.
F) T130=T118(Z118+Z122)/Z118,
G) T50=T130 - T118,
H) T50=T118(Z122/Z118),
I) P50+P118=P130
где:
T130представляет собой крутящий момент несущей сателлиты планетарной передачи 130,
T50 представляет собой крутящий момент эпициклической коронной шестерни 50,
T118 представляет собой крутящий момент солнечной шестерни 118,
P50 представляет собой мощность, передаваемую элементом 50,
P118 представляет собой мощность, передаваемую элементом 118,
P130 представляет собой мощность, передаваемую элементом 130.
В зависимостях A, B, C и D направление скорости вращения и крутящего момента каждого элемента обычно считается положительным в направлении по часовой стрелке для наблюдателя, расположенного вдоль осей вращения элемента 50 и элемента, 118, которое направлено в сторону дифференциала 34. Скорость вращения и крутящий момент элемента 130 обычно считаются положительными в направлении по часовой стрелке для наблюдателя, который расположен вдоль оси 130 вращения и смотрит в сторону от дифференциала 34 в направлении элемента 130. Мощность считается положительной, когда она передается от элемента 50 и от элемента 118 дифференциалу 34, а от него элементу 130.
Значение мощности, передаваемой от каждого элемента, является положительным, когда скорость вращения и крутящий момент имеют одинаковое направление. Например, когда как N130, так и T130 имеют направление по часовой стрелке, или обе имеют направление против часовой стрелки, мощность, передаваемая дифференциалом 34 элементу 130, является положительной. Однако, когда N130 имеет противоположное направление относительно T130, мощность, передаваемая элементом 130 дифференциалу 34, является отрицательной, или передается дифференциалу 34 от вала 30. Известно, что первый способ действия обычно осуществляется, когда все источники 18 и 22 мощности передают мощность транспортному средству для его ускорения, тогда как второй способ действия осуществляется, когда транспортное средство, во время операции уменьшения скорости, высвобождает свою кинетическую энергию, подзаряжая аккумулятор 54.
Аналогичные соображения могут быть применены к элементам 50 и 118, или когда скорость вращения и крутящий момент имеют один и тот же знак, мощность, передаваемая одним элементом, вводится в дифференциал 34, а, с другой стороны, когда скорость вращения и крутящий момент имеют противоположные направления, мощность, передаваемая каждым элементом, высвобождается из дифференциала и перемещается в источники 22 и 18 мощности.
Как можно видеть на фигуре 2 тороидальная CVT 246 соединена с валом 81, который относительно CVT 246 выступает в качестве входного или выходного вала для передвижения.
Вариатор 56 скорости дополнительно содержит передачу 44, которая последовательно соединена с тороидальной CVT 246. Такая передача 44 предпочтительно относится к типу только с одним дискретным передаточным отношением.
Вариатор 56 скорости содержит передачу 48, которая параллельно соединена с элементом, который состоит из последовательного соединения между передачей 44 и устройством 246. Такая передача 48 относится к типу только с одним дискретным передаточным отношением.
Тороидальная CVT содержит по меньшей мере первый тороидальный фрикционный диск 266, который механически соединен с валом 81 и который, соответственно, будет также дальше обозначаться, как входной тороидальный фрикционный диск, и второй тороидальный фрикционный диск 270, который соединен с первым тороидальным фрикционным диском 266 посредством по меньшей мере двух роликовых элементов 268, имеющих сферическую поверхность, относящуюся к типу с вибрирующим положением. Второй тороидальный фрикционный диск 270 соединен с валом 272 для передачи мощности, входным или выходным, в соответствии со способами действия вариатора 56. Соответственно, второй тороидальный фрикционный диск будет также дальше обозначаться, как выходной тороидальный фрикционный диск. Тороидальные фрикционные диски 266 и 270 расположены соосно и имеют противоположное направление вращения относительно друг друга.
Необходимо заметить, что согласно предпочтительному варианту осуществления CVT настоящего изобретения содержит по меньшей мере три роликовых элемента 268.
Это особенно предпочтительно, поскольку это улучшает стабильность системы.
В действительности, использование трех или более роликов в контакте с фрикционным диском позволяет создавать динамическое ограничение для того, чтобы избегать передвижения фрикционного диска в перпендикулярном направлении, упоминаемом как радиальная нагрузка ролика.
В этом случае фрикционный диск будет вынужден оставаться в своем вращающемся центральном положении, и не будет возможно никакого перпендикулярного движения.
Согласно дополнительному предпочтительному варианту осуществления три ролика расположены между ними под углом 120 градусов.
Снова со ссылкой на фигуры 4 и 5 устройство 246 выполнено с возможностью изменения передаточного отношения между валами 81 и 272 с колебаниями роликовых элементов 268, имеющих сферическую поверхность. Устройство 246 является реверсивным или выполнено с возможностью передачи мощности как от вала 81 на вал 272, так и наоборот от вала 272 на вал 81.
В более полном варианте конструкции фигуры 3 вариатор 56 скорости содержит передачу 44 с дискретным передаточным отношением, которая расположена последовательно с устройством 246, содержащим по меньшей мере первое зубчатое колесо 90, вал 92 и второе зубчатое колесо 94, которые соединены последовательно с валом 272 и которые выполнены с возможностью передачи мощности, являющейся входной или выходной, от вала 272 в соответствии со способами работы вариатора 56.
Как уже указывалось выше, фигура 1 схематичным образом иллюстрирует устройство, которое схематично иллюстрирует систему согласно настоящему изобретению в наиболее полном варианте, в котором передача 48, которая всегда относится к типу, имеющему дискретное передаточное отношение, расположена параллельно устройствам 246 и 44, соединена с валом 81 и выполнено с возможностью передачи мощности, являющейся входной или выходной, от вала 81 в соответствии со способами работы вариатора 56.
Передачи 44 и 48 могут быть реверсивными или выполнены с возможностью передачи мощности как от устройства 246 или вала 81 на дифференциал 42, так и наоборот, от дифференциала 42 на устройство 246 или вал 81.
Как уже указано, вариант фигуры 3 представляет собой отдельный случай фигуры 1 настоящего изобретения, в котором устройства 26 и 48 опущены.
Однако вариант фигуры 2 представляет собой отдельный случай фигуры 1 настоящего изобретения, в котором устройства 26, 44 и 48 опущены.
По аналогии с правилом, принятым для дифференциала 34, передача мощности от тороидальной CVT 246 на дифференциал 42 осуществляется, когда направления скорости вращения и крутящего момента вала 272 являются синхронными, и наоборот, от дифференциала 42 в тороидальную CVT 246, когда указанные выше направления являются противоположными.
Со ссылкой на соотношения B, C и D, изложенные выше, крутящий момент на элементе 112 дифференциала 42, следовательно, является положительным, когда транспортное средство ускоряется или имеет постоянную скорость, и является отрицательным, когда оно замедляется. Таким же образом, крутящий момент на валу 272 является положительным в первых двух рабочих состояниях и отрицательным в третьем рабочем состоянии транспортного средства.
В вариантах конструкции фигур 2 и 3 направление вращения вала 272 всегда является противоположным направлению вращения вала 81 и тороидального фрикционного диска 266. В результате, направление вращения элемента 98 является всегда противоположным направлению вращения элемента 102.
В примерах всех фигур 1, 2, 3, 4 и 5 тороидальная CVT 246 изменяет на обратное направление движения тороидального фрикционного диска 270 относительно тороидального фрикционного диска 266.
В примерах фигур 2 и 3 второй дифференциал 42 относится к эпициклическому типу и снабжен тремя элементами 98, 102, 112, которые соединены с передачей 44 (с валом 272 в примере фигуры 2), с валом 81 и с первым элементом 50 дифференциала 34, соответственно. Передача 44 содержит два зубчатых колеса 90, 94, которые неподвижно соединены с противоположными осевыми концами вала 92, которые сцеплены с зубчатым колесом 272, которое неподвижно соединено с тороидальным фрикционным диском 270 и с зубчатым венцом 97, который предоставлен на элементе 98 эпициклического дифференциала, соответственно.
В примерах фигур 2 и 3 вариатор 246 соединен с эпициклической коронной шестерней дифференциала 42, а несущая сателлиты планетарная передача представляет собой соединительный элемент между вторым дифференциалом 42 и первым дифференциалом 34.
В других возможных вариантах конструкции (не проиллюстрированных) примеров фигур 2 и 3 элемент 98 дифференциала 42 соединен с валом 81, тогда как элемент 102 соединен с передачей 44 (с валом 272 в примере фигуры 2).
В этих других возможных вариантах конструкции (не проиллюстрированных) примеров фигур 2 и 3 вариатор 246 соединен с солнечной шестерней дифференциала 42, тогда как несущая сателлиты планетарная передача все также представляет собой соединительный элемент между дифференциалом 42 и дифференциалом 34.
В примерах фигур 2 и 3 элемент 98 второго эпициклического дифференциала 42 состоит из соосной коронной шестерни на валу 272, содержащей на ее осевом конце наружную цилиндрическую поверхность, на которой создан наружный зубчатый венец 97, и внутреннюю цилиндрическую поверхность, а на стороне, противоположной в осевом направлении наружному зубчатому венцу 97, внутренний зубчатый венец 106. Элемент 102 состоит из солнечной шестерни, которая неподвижно соединена с валом 81, а элемент 112 состоит из несущей сателлиты планетарной передачи, с которой соединено с возможностью вращения множество планетарных шестерней 110. Планетарные шестерни 110 сцеплены как с шестерней 102, так и с внутренним зубчатым венцом 106.
В других возможных вариантах конструкции (не проиллюстрированных) эпициклический дифференциал 42 может относиться к типу с иной конструкцией, такому как например, с шестернями, являющимися коническими, или к эпициклическому типу с множеством ступеней.
Для известных кинематических свойств эпициклических дифференциалов характерные величины дифференциала 34 связаны отношением F, изложенным ниже:
F) Z102N102+Z106N98=(Z102+Z106)N112,
где:
Z102 представляет собой количество зубьев солнечной шестерни 102,
Z106 представляет собой количество зубьев внутреннего зубчатого венца 106,
N102 представляет собой скорость вращения солнечной шестерни 102,
N98 представляет собой скорость вращения коронной шестерни 98,
N112 представляет собой скорость вращения несущей сателлиты планетарной передачи 112.
Первый элемент 50 дифференциала 34 содержит наружный зубчатый венец 124, который входит в зацепление с наружным зубчатым венцом 114, который предоставлен на несущей сателлиты планетарной передаче 112 дифференциала 42. Посредством зубчатой передачи, содержащей зубчатые венцы 114, 124, первый элемент 50 принимает или передает движение от вариатора 56 посредством дифференциала 42 или на него, соответственно.
Фигуры 4 и 5A-E иллюстрируют тороидальную CVT 246 более подробно.
Тороидальная CVT 246 допускает изменение передаточного отношения между валами 81 и 272 непрерывным образом посредством колебаний роликовых элементов 268 со сферической поверхностью.
На фигурах 5A-5E два главных радиуса кривизны сферической поверхности роликовых элементов 268 в месте контакта с тороидальным фрикционным диском 266 и 270 обозначены, соответственно, 301 и 303. Поскольку фрикционная поверхность роликовых элементов 268 относится к сферическому типу, два главных радиуса 301 и 303 имеют одинаковые параметры. На одних и тех же Фигурах два главных радиуса кривизны поверхности контакта тороидального фрикционного диска 266 (также соответствующего радиусам кривизны диска 270) в месте контакта с роликовыми элементами 268 обозначены 302 и 304. Радиус 302 относится к выпуклому типу, тогда как радиус 304 может быть вогнутый (как показано на фигурах) или выпуклый, или может принимать неопределенное значение, когда поверхность тороидального фрикционного диска (дисков) 266 и/или 270 относится к коническому типу.
В примере фигур 4 и 5 тороидальные фрикционные диски 266 и 270 имеют симметричные фрикционные поверхности, для которых радиусы 302 и 304 имеют одинаковые размеры и вогнутость как для тороидальных фрикционных дисков 266, так и для 270. В других возможных вариантах тороидальной CVT 246 (не проиллюстрированных на фигурах), радиусы 302 и 304 могут иметь различные значения, если тороидальные фрикционные диски 266 и 270 имеют фрикционную поверхность различной геометрии.
На фигуре 4 между линией, которая расположена по касательной к фрикционной поверхности в месте контакта, и осью вращения тороидального фрикционного диска 266 обозначен 306 угол s1. Между линией, касательной к фрикционной поверхности в месте контакта, и осью вращения роликового элемента 268 обозначен 308 угол s2.
Для наблюдателя, который расположен вдоль оси вращения тороидального фрикционного диска 266 и который смотрит на тороидальную CVT 246, вращение указанного выше диска 266 традиционно считается положительным, если диск 266 вращается в направлении по часовой стрелке. Для второго наблюдателя, который расположен в вершине угла 308, по причине того, что отсутствует проскальзывание между контактными поверхностями диска 266 и роликовым элементом 268, положительное направление соответствует положительному направлению вращения диска 266, то есть направлению вращения роликового элемента 268 по часовой стрелке. Для того же самого первого наблюдателя вдоль оси вращения тороидального фрикционного диска 266, который смотрит на тороидальную CVT 246, вследствие того, что отсутствует проскальзывание между контактными поверхностями роликового элемента 268 и диска 270, отрицательное направление соответствует положительному направлению вращения роликового элемента 268, другими словами, направлению вращения диска 270 против часовой стрелки. Поскольку диски 266 и 270 расположены coосно, функциональная особенность представленной тороидальной CVT 246 состоит в том, что указанные выше диски имеют противоположные друг другу направления вращения.
На фигурах 5A-E усилие, прикладываемое к месту контакта между диском 266 и роликовым элементом 268, обозначено 310. В тороидальной CVT 246 настоящего изобретения предполагается, что усилие 310 является постоянным фактором независимо от изменения передаточного отношения устройства 246.
Дополнительно следует отметить, что в тороидальной CVT 246 системы согласно настоящему изобретению угол 306 между линией, касательной к фрикционной поверхности в месте контакта и осью вращения тороидального фрикционного диска 266 остается постоянным для каждого передаточного отношения CVT, тогда как угол 308 между указанной выше линией и осью вращения роликового элемента 268 изменяется в соответствии с изменением передаточного отношения CVT.
На фигурах 5A-5E обозначен 312 диаметр контакта между роликовым элементом 268 и тороидальным диском 266 или 270, который расположен на самом диске, который не изменяется в соответствии с изменением передаточного отношения тороидальной CVT.
Поскольку главные радиусы 301, 302, 303 и 304, как и в случае контактного усилия в месте контакта фрикционных поверхностей 310, остаются неизменными в соответствии с изменением передаточного отношения тороидальной CVT 246, как описано выше, очевидно, что напряжение по Герцу в месте контакта (конкретное давление в месте контакта) будет оставаться постоянным при любом значении передаточного отношения, которое принимает тороидальная CVT 246. В результате, преимущественно, при постоянном значении контактного усилия 310, оно будет соответствовать постоянному напряжению по Герцу, которое имеет подходящие параметры выше предела усталости материала роликового элемента 268 и тороидальных фрикционных дисков 266 и 270; распределяясь, как объяснено выше, с использованием сложных и дорогих вспомогательных устройств для изменения усилия 310.
В известных тороидальных CVT, а также в представленном изобретении 246, существует допустимый коэффициент трения между контактными поверхностями, который остается принципиально неизменным. Указанный выше коэффициент трения устанавливает максимальную касательную нагрузку и крутящий момент, который может передаваться тороидальными фрикционными дисками 266 и 270. В результате сказанного выше, данное максимальное значение крутящего момента, который может передаваться тороидальными фрикционными дисками 266 и 270, остается постоянным независимо от передаточного отношения тороидальной CVT 246.
В примере фигур 5A-5E передаточные отношения, указанные между R=0,38693 и R=1,0, показывают уменьшение скорости вращения тороидального фрикционного диска 270 относительно диска 266. В результате закона сохранения энергии, крутящий момент, передаваемый диском 270, относительно крутящего момента, передаваемого диском 266, является обратно пропорциональным передаточному отношению, изложенному выше, для которого он является более высоким по абсолютному значению. В результате, максимальный момент, который может передаваться тороидальной CVT 246, измеренный на диске 270, соответствует максимальному крутящему моменту, который может передаваться тем же самым тороидальным диском 270. На примере графика фигуры 6A, где крутящий момент обозначен в Нм на диске 270 в зависимости от передаточного отношения тороидальной CVT 246 настоящего изобретения, для уменьшаемых значений передаточного отношения (от R=0,38 до R=1,0), значение крутящего момента является постоянным и равно максимально допустимому на самом диске 270.
Аналогичные соображения могут быть применены для передаточных отношений между R=1,0 и R=2,5844, которые, вследствие этого, показывают кратное значение скорости вращения тороидального фрикционного диска 270 относительно диска 266. В результате закона сохранения энергии, крутящий момент, передаваемый диском 270, относительно крутящего момента, передаваемого диском 266, является обратно пропорциональным передаточному отношению, изложенному выше, для которого он является более низким по абсолютному значению. В результате, максимальный момент, который может передаваться тороидальной CVT 246, измеренный на диске 270, соответствует максимальному крутящему моменту, который может передаваться тороидальным диском 266, разделенному на передаточное отношение R выше. На примере графика Фигуры 6A для уменьшающихся значений передаточных отношений (от R=1,0 до R=2,59), значение крутящего момента на диске 270 уменьшается обратно пропорционально передаточному отношению R.
В других возможных вариантах тороидальной CVT 246 (не проиллюстрированных), передаточные отношения R могут принимать различные числовые значения.
Как проиллюстрировано на фигуре 6A, крутящий момент, который может передаваться тороидальной CVT настоящего изобретения, имеет первую часть постоянного значения, упоминаемую как понижающее отношение, и вторую часть постоянной мощности, другими словами, с уменьшающимся крутящим моментом, упоминаемую как повышающее отношение.
Значительное преимущество настоящего изобретения состоит в том, что форма графика разрешенного крутящего момента тороидальной CVT 246, показанного на фигуре 6, предпочтительно относится к тому же самому типу, что и обычные усилия, которые вводятся крутящим моментом, который доставляется электрическим двигателем 18 переменного тока, и за счет одного и того же обычного способа использования гибридного транспортного средства, другими словами, с первой частью с постоянным крутящим моментом и второй частью с постоянной мощностью. В результате, тороидальная CVT 246 настоящего изобретения имеет линию разрешенного крутящего момента с постоянным коэффициентом надежности относительно вводимых усилий.
Дополнительное преимущество, связанное с использованием CTV согласно настоящему изобретению, состоит в том, что использование фрикционных дисков с фрикционной поверхностью тороидальной формы, которая представляет собой выпуклую поверхность, улучшает стабильность системы.
В связи с этим, необходимо заметить, что фрикционный диск на поперечном сечении точки контакта между диском и роликом может быть двух различных типов: вогнутый или выпуклый.
В соответствии с контактным напряжением согласно теории Герца, вогнутая поверхность является подходящей для получения более широкой контактной конфигурации. Однако, чем шире контактная конфигурация, тем на большее расстояние центральная точка контакта может двигаться в одном направлении и в противоположном направлении. Следовательно, если поверхность качения фрикционного диска имеет вогнутую форму, положение центральной точки контакта является более нестабильным.
В отличие от настоящего изобретения, известные типы тороидальных CVT имеют фрикционный диск с вогнутой поверхностью. Из-за этой конкретной геометрии, возникает неустойчивость в работе вплоть до возникновения большой вибрации и полного разрушения самой тороидальной CVT.
Вместо этого, тороидальная CVT согласно настоящему изобретению имеет только выпуклую поверхность фрикционного диска на поперечном сечении в точке контакта. Поверхность диска будет содержать выпуклость при любом рабочем состоянии и передаточном отношении представленной тороидальной CVT, достигая таким образом упомянутого выше преимущества.
Со ссылкой на фигуры 7A и 7B согласно альтернативному варианту осуществления роликовые элементы 268 являются плавающими и самовыравнивающимися между собой.
Тороидальные CVT согласно предшествующему уровню техники имеют элементы качения в фиксированном положении. Каждый роликовый элемент и фрикционный диск поддерживаются таким образом, чтобы не было возможности совпадения в наилучшем относительном положении между ними. Большинство из них поддерживаются несколькими очень точными и дорогими подшипниками.
В этих существующих тороидальных CVT требуется некоторая необычайно точная и дорогая механическая обработка для того, чтобы как можно больше ограничить допуски геометрического положения элементов качения.
Кроме того, всякое геометрическое смещение данных элементов будет обеспечивать различную контактную нагрузку между элементами качения и различных скоростей точки контакта (вследствие различных радиусов качения). Будет возникать износ и большое контактное напряжение.
Напротив, в тороидальной CVT согласно варианту осуществления фигур 7A и 7B по меньшей мере один из роликовых элементов плавает в радиальном направлении и является самовыравнивающимся по отношению к другому.
Это достигается за счет использования пары промежуточных дисков 266' и 266'' и, необязательно, дополнительной пары промежуточных дисков 270' и 270''. Каждый из промежуточных дисков 266' и 266'' (и аналогичных дисков 270' и 270'', для которых применяются аналогичные концепции) выполнен с возможностью передвижения вдоль радиального направления. Предпочтительно, чтобы диск 266' был выполнен с возможностью передвижения вдоль направления, которое перпендикулярно одному из других промежуточных дисков 266''. Таким образом, фрикционный диск 266, который поддерживается промежуточными дисками 266' и 266'', выполнен с возможностью передвижения вдоль плоскости, перпендикулярной его оси.
Согласно предпочтительному варианту осуществления способность двигаться может достигаться за счет обеспечения соединения с люфтом между промежуточными дисками и между самым крайним наружным промежуточным диском 266' и фрикционным диском 266, а также за счет предоставления выступа 266A, помещенного в соответствующее гнездо 266B для того, чтобы передавать крутящий момент между последовательными дисками. В любом случае очевидно, что для того, чтобы достигнуть данный результат может быть использовано дополнительное решение.
Фрикционный диск 266, который, соответственно, снабжен плавающей способностью, будет соответствовать непосредственно оптимальному положению по отношению к другим элементам.
Следствие данного варианта осуществления состоит в том, что тороидальная CVT согласно настоящему изобретению не требует какой-либо дорогостоящей опоры.
Далее со ссылкой на фигуры 8A и 8B согласно дополнительному варианту осуществления, который также может быть использован в связи с представленным вариантом осуществления, по меньшей мере на одном из фрикционных дисков применен механический осевой кулачок.
С этой целью, фрикционный диск соединен с комплементарным диском, который фактически находится в контакте с роликовыми элементами 268.
Крутящий момент между фрикционным диском и комплементарным диском достигается посредством сферического или цилиндрического элемента, который помещен между двумя гнездами, образованными на противоположных поверхностях фрикционного диска и комплементарного диска, соответственно. Согласно настоящему изобретению сферический или цилиндрический элемент вместе с гнездами образуют осевой кулачок.
Форма гнезда такова, что при передаче крутящего момента комплементарный диск смещается в таком направлении, чтобы на роликовые элементы предоставлялась предварительная нагрузка.
Фигуры 9A и 9B представляют пример (но не эксклюзивный) механического осевого кулачка, наложенного на фрикционный диск тороидальной CVT настоящего изобретения.
Необходимо заметить, что подобный механический осевой кулачок прикладывает к системе CVT осевую предварительную нагрузку в качестве линейной функции передаваемого крутящего момента, как показано на фигуре 9B.
Однако, также необходимо заметить, что подобный механический осевой кулачок подходит для использования только на тех тороидальных CVT, где передаваемый крутящий момент на боковом диске не изменяется с самим передаточным числом CVT, как в CVT согласно настоящему изобретению.
Также целесообразно, чтобы боковой диск сохранял передаваемый крутящий момент постоянным при всех передаточных числах CVT для того, чтобы добиться оптимальной производительности подобного управляющего устройства.
В предпочтительном варианте осуществления тороидальной CVT настоящего изобретения, оба фрикционных диска (входной и выходной) приводятся в действие посредством механического осевого кулачка.
Вследствие этого, значительное преимущество тороидальной CVT состоит в том, что ее геометрия такова, что передаваемый крутящий момент имеет ровный и постоянный крутящий момент при всех передаточных числах CVT, как показано на фигуре 10.
Преимущества настоящего варианта осуществления могут быть понятны с учетом того, что каждая тороидальная CVT передает крутящий момент посредством контактного давления между поверхностями качения. Однако высокое контактное давление является причиной больших потерь мощности (потерь при качении), а при низком контактном давлении нельзя избежать проскальзывания в точке контакта, если возникает неожиданный пиковый крутящий момент.
С другой стороны, в некоторых вариантах применения, т.е. на сельскохозяйственных тракторах, иногда транспортное средство может доставлять мощность только для механизма отбора мощности и без мощности для продвижения. В этом случае, было бы желательно не создавать предварительную нагрузку и не прикладывать какого-либо давления на поверхности качения тяговой CVT.
Следовательно, для регулирования правильной предварительной нагрузки системы полной CVT могло бы подойти специальное устройство, которое способно управлять давлением между поверхностями качения в качестве линейной функции требуемого передаваемого крутящего момента.
В предшествующем уровне техники было сделано множество гипотез подобного устройства. Конечно, электронное, пневматическое или гидравлическое устройство не может выполнять все требования приведенных выше вариантов применения. Известно, что все данные устройства имеют некоторую задержку управления правильной предварительной нагрузкой системы CVT. В случае крутильных колебаний (и пика крутящего момента) коленчатого вала двигателя, приведение в действие электронного, пневматического или гидравлического устройства происходило бы слишком поздно. Кроме того, они являются слишком дорогими.
Вместо этого осевой кулачок согласно настоящему варианту осуществления гарантирует быстрое и мгновенное приведение в действие, поскольку он создает давление в системе в качестве непосредственной функции требуемого передаваемого крутящего момента.
Вследствие этого, основными преимуществами применимости подобного механического осевого кулачкового устройства в тороидальной CVT являются: мгновенное приведение в действие, автоматическое приведение в действие, дешевое и легкое изготовление, отсутствие потерь мощности вследствие излишней предварительной нагрузки, когда для продвижения не требуется никакого крутящего момента, отсутствие риска проскальзывания в точке контакта и отсутствие износа поверхностей качения.
Снова со ссылкой на фигуру 1 система 10 тяги содержит устройство 62 управления для трансмиссии 100 и источников 18, 22 мощности.
Устройство 62 управления воздействует на рабочие параметры второго источника 18 мощности посредством инвертора 20 и первого источника 22 мощности, устанавливая только скорость его вращения. Устройство 62 управления воздействует на параметры второго реверсивного источника 18 мощности, устанавливая скорость вращения, крутящий момент, а также направление и скорость его вращения.
Для известных свойств дифференциалов 34 и 42, используемых в трансмиссии 100, после того, как устройство 62 управления устанавливает значение крутящего момента второго реверсивного источника 18 мощности, автоматически определяется значение крутящего момента, воздействующего на тороидальную CVT 246 и на эндотермический двигатель 22. Аналогичным образом, на тороидальной CVT 246 и на эндотермическом двигателе 22 в виде графика усилия пропорционально воспроизводится такая же форма графической характеристики электрического двигателя 18 переменного тока, другими словами, первая часть с постоянным крутящим моментом и вторая часть с постоянной мощностью. Результатом описанного являются два другие преимущества представленной трансмиссии 100 для гибридных транспортных средств: нет необходимости в регулировании крутящего момента, доставляемого эндотермическим двигателем 22, и можно полностью обойтись без использования какого-либо трудного и ненадежного устройства для ограничения крутящего момента, вводимого в тороидальную CVT 246.
Устройство 62 управления дополнительно влияет на вариатор 56 для установки передаточного отношения между первым источником 22 мощности и первым элементом 50 первого эпициклического дифференциала 34.
В примере Фигур 2 и 3 устройство 62 управления воздействует на пару роликовых элементов 268 для того, чтобы изменять положение и место их контакта с тороидальными фрикционными дисками 266 и 270. В результате изменяется скорость соединенного с ним вала 272.
Вследствие этого, посредством устройства 62 управления можно воздействовать на вариатор 56 для того, чтобы устанавливать значение скорости вала 272 независимо от значения скорости вала 81, соединенного с первым источником 22 мощности.
Устройство 62 управления получает в качестве входных сигналов:
- положение педали 138 газа, которая может быть задействована пользователем;
- положение педали 58 тормоза, которая может быть задействована пользователем;
- положение или передаточное отношение вариатора 246 скорости;
- энергетический заряд аккумулятора 54;
- рабочие параметры инвертора 20;
- скорость вращения нереверсивного источника 22 мощности.
Педаль 138 газа, посредством которой водитель сообщает намерение ускорять, замедлять или удерживать транспортное средство в состоянии с постоянной скоростью, соединена с устройством 62 управления посредством соединения, которое относится к электрическому, механическому, гидравлическому или какому-то другому типу.
Педаль 58 тормоза, посредством которой водитель сообщает намерение замедлять или удерживать транспортное средство в состоянии с постоянной скоростью, соединена с устройством 62 управления посредством соединения, которое относится к электрическому, механическому, гидравлическому или какому-то другому типу.
В других возможных вариантах конструкции средство 62 управления также получает в качестве комплементарного входного сигнала частоту вращения валов и элементов.
Согласно способу управления системой 10 тяги можно приводить в действие вариатор 56 посредством устройства 62 управления для того, чтобы устанавливать значение скорости солнечной шестерни 102, равное:
G) N102=- (Z106/Z102 )N98
Данное значение, которое зависит только от скорости коронной шестерни N98, устанавливает нулевое значение скорости N112 несущей сателлиты планетарной передачи 112, как очевидно из замены отношения G в отношении F.
Когда несущая сателлиты планетарная передача 112 является неподвижной, первый элемент 50 дифференциала 34, который входит в зацепление непосредственно с ней, также имеет скорость, равную нулю, и, следовательно, не передает мощность.
Отношение H, изложенное ниже, очевидно из замены нулевого значения мощности, передаваемой элементом 50 в отношении E:
H) P118=P130
В данной ситуации в дифференциале 34 мощность передается вторым элементом 118 третьему элементу 130, или наоборот. В частности, в случае, в котором транспортное средство замедляется, энергия торможения, передаваемая колесами 38 на ось 30, передается полностью, за вычетом механических потерь, на вал 14, а от него во второй реверсивный источник 18 и в аккумулятор 54. Вследствие этого, на стадии торможения транспортного средства для подзарядки аккумулятора 54 можно использовать всю энергию торможения.
Чтобы несущая сателлиты планетарная передача 112 могла оставаться неподвижной независимо от скорости вращения нереверсивного источника 22, необходимо, чтобы солнечная шестерня 102, расположенная на том же самом элементе 102, была в состоянии принимать направление вращения, противоположное направлению вращения эпициклической коронной шестерни 106, расположенной на элементе 98, как ясно устанавливается отношением G.
Предпочтительно, система согласно настоящему изобретению обеспечивает возможность получения данной характеристики, потому что характеристики тороидальной CVT 246, описанные выше, обеспечивают возможность изменения направления вращения диска 270 на обратное относительно диска 266. Противоположное направление вращения входных элементов 102 и 98 дифференциала 42, которое устанавливает нулевую скорость несущей сателлиты планетарной передачи 112, является причиной предварительно заданного дискретного значения передаточного отношения бесступенчатого вариатора 246. Вследствие этого, элементы 102 и 98 также принимают противоположные направления вращения для значений передаточного отношения бесступенчатого вариатора 246, которые отличаются от значений, для которых несущая сателлиты планетарная передача 112 остается неподвижной. В этом последнем рабочем состоянии из анализа соотношений от A до F, прикладываемых к дифференциалу 42, видно, что вследствие того, что крутящие моменты в элементах 102 и 98 являются синхронными, значения мощностей данных элементов также имеют противоположные направления. Из отношения E, прикладываемого к дифференциалу 42, следует, что по меньшей мере один из двух входных элементов 102 и 98, передает значение мощности больше, чем значение мощности, передаваемое выходным элементом 112. Вследствие этого, выходная мощность от элемента 112 остается той же самой категории, что и мощность, доставляемая из нереверсивного источника 22, для которого по меньшей мере один из двух элементов 102 и 98, следовательно, передает значение мощности больше, чем значение мощности доставляемой источником 22. В случае Фигур 2 и 3 независимо от различных вариантов его конструкции бесступенчатый вариатор 246, находящийся в соединении с элементом 98, передает значение мощности больше, чем значение мощности, доставляемой источником 22.
Следовательно, чтобы выходной элемент 112 дифференциала 42 мог оставаться неподвижным в предварительно заданном рабочем состоянии, соответствующем передаточному отношению бесступенчатого вариатора 246, необходимое условие состоит в том, чтобы геометрия вариатора 56 обеспечивала возможность противоположного направления вращения элементов 102 и 98 и чтобы бесступенчатый вариатор 246 передавал значение мощности больше, чем значение мощности, доставляемой источником 22.
В состоянии, в котором первый элемент 50 является неподвижным, первый источник 22 мощности, соединенный с ним через вариатор 56, может выключаться без подвергания транспортного средства каким-либо изменениям условий его движения.
Согласно еще одному способу управления системой 10 тяги скорость оси 14 и первого элемента 50 устанавливают таким образом, чтобы электрический двигатель 18 работал приблизительно с максимальной частотой вращения электрического двигателя 18, инвертора 20 и батареи 54 до максимально возможной степени, с очевидной пользой для общей эффективности системы 10.
Согласно еще одному способу управления системы 10 тяги, когда аккумулятор 54 имеет высокий уровень заряда, устройство 62 управления действует так, чтобы увеличить мощность, доставляемую вторым источником 18 мощности. И наоборот, когда аккумулятор 54 имеет низкий уровень заряда, устройство 62 управления действует так, чтобы увеличить мощность, доставляемую первым источником 22 мощности, и уменьшает мощность, доставляемую вторым источником 18. В частности, первый источник 22 мощности может выключаться, когда аккумулятор 54 имеет высокий уровень заряда. Данный способ управления содействует минимизации колебаний заряда аккумулятора 54 с последующим увеличением его эксплуатационного ресурса.
Системе 10 тяги удается обеспечивать замедление транспортного средства без необходимости использования механизмов рассеивания, таких как например, тормоза.
Вследствие этого, система тяги настоящего изобретения решает задачи, изложенные со ссылкой на известный предшествующий уровень техники, имея в то же самое время большое количество преимуществ.
Они включают в себя возможность регулирования скорости первого элемента 50 дифференциала 34 независимым образом от эндотермического двигателя, который обычно используется в качестве первого нереверсивного источника 22 мощности, так, чтобы он работал приблизительно на уровне максимальной эффективности и на уровне самого низкого потребления топлива в наиболее возможной степени. Данная характеристика в сочетании с использованием тороидальной CVT, допускающей реверсивное движение, обеспечивает возможность управления движением транспортного средства оптимальным образом.


Изобретение относится к системе тяги для транспортных средств. Система тяги содержит первый источник мощности нереверсивного типа, второй источник мощности реверсивного типа и трансмиссию. Трансмиссия содержит первое дифференциальное устройство. Трансмиссия дополнительно содержит вариатор скорости, который помещен между первым источником и первым дифференциальным устройством и который содержит устройство бесступенчатого регулирования скорости и второе дифференциальное устройство. Устройство бесступенчатого регулирования скорости относится к типу тороидального фрикционного колеса и содержит входной диск бокового движения, выходной диск бокового движения и два холостых вибрирующих фрикционных роликовых элемента. Входной и выходной диски бокового движения имеют фрикционную поверхность тороидальной формы, а холостые вибрирующие роликовые элементы имеют фрикционную поверхность с формой в виде сферического купола. Достигается повышение эффективности транспортного средства во всех условиях работы.19 з.п. ф-лы, 10 ил.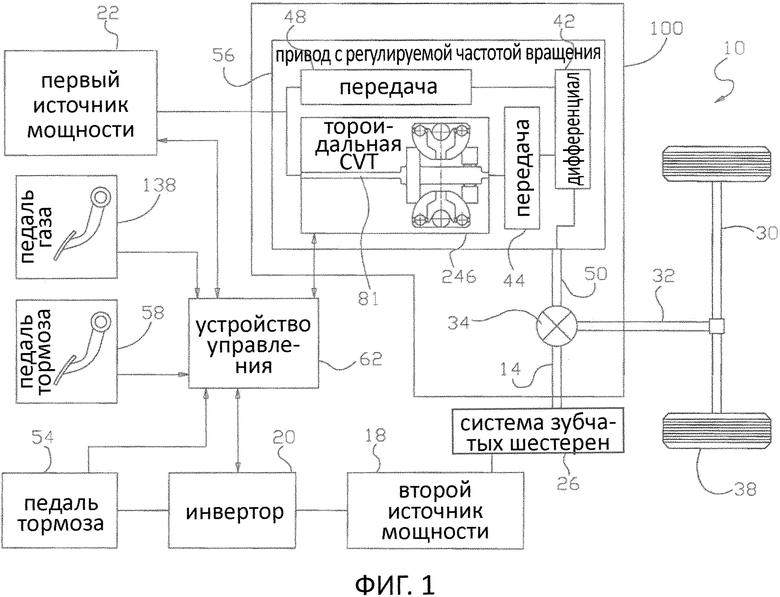
1. Система (10) тяги для транспортных средств, содержащая:
- первый источник (22) мощности нереверсивного типа;
- второй источник (18) мощности реверсивного типа;
- трансмиссию (100), которая соединена с первым источником (22) и вторым источником (18) и которая содержит первое дифференциальное устройство (34), соединенное или соединяемое с первым источником (22) мощности и вторым источником (18) мощности и с осью (30) транспортного средства;
при этом трансмиссия (100) содержит вариатор (56) скорости, помещенный между первым источником (22) мощности и первым дифференциальным устройством (34), который содержит:
- устройство (246) бесступенчатого регулирования скорости;
- второе дифференциальное устройство (42), соединенное с устройством (246) бесступенчатого регулирования скорости, с первым источником (22) и с первым дифференциальным устройством (34);
при этом устройство (246) бесступенчатого регулирования скорости относится к типу тороидального фрикционного колеса и содержит:
- входной фрикционный диск (266), соединенный с первым источником (22),
- выходной фрикционный диск (270), соединенный со вторым дифференциальным устройством (42), и
- по меньшей мере два холостых вибрирующих фрикционных роликовых элемента (268);
входной и выходной фрикционные диски (266, 270), имеющие фрикционную поверхность тороидальной формы, и холостые вибрирующие роликовые элементы (268), имеющие фрикционную поверхность с формой в виде сферического купола;
отличающаяся тем, что по меньшей мере один из фрикционных дисков (266, 270) выполнен с возможностью передвижения вдоль радиального направления и тем, что она дополнительно содержит пару промежуточных дисков (266', 266''), при этом каждый из промежуточных дисков (266', 266'') выполнен с возможностью передвижения вдоль радиального направления, причем один промежуточные диск (266') выполнен с возможностью передвижения вдоль направления, которое перпендикулярно одному из других промежуточных дисков (266'').
2. Система (10) тяги по п.1, в которой входной фрикционный диск (266) и выходной диск (270) с боковым движением имеют фрикционную поверхность тороидальной формы.
3. Система (10) тяги по п.1 или 2, в которой холостые роликовые элементы (268) находятся в контакте с входным фрикционным диском (266) и выходным фрикционным диском (270) в местах контакта, находящихся в положениях друг напротив друга относительно оси вращения холостого роликового элемента (268).
4. Система (10) тяги по п.3, в которой ось вращения холостых роликовых элементов (268) по существу перпендикулярна оси вращения входного и выходного фрикционных дисков (266, 270), когда устройство (246) бесступенчатого регулирования скорости имеет передаточное отношение, равное 1.
5. Система (10) тяги по п.1, в которой входной и выходной фрикционный диски (266, 270) соединены с соответствующим элементом (102, 110) второго дифференциального устройства (42).
6. Система (10) тяги по п.5, в которой первое дифференциальное устройство (34) содержит первый элемент (50), соединенный со вторым дифференциальным устройством (42), второй элемент (118), соединенный со вторым источником (18), и третий элемент (130), соединенный с осью (30) транспортного средства.
7. Система (10) тяги по п.1, содержащая устройство (62) управления, связанное для работы с устройством (246) бесступенчатого регулирования скорости таким образом, что передаточное отношение между входным и выходным фрикционными дисками (266, 270) изменяется в зависимости от условий движения транспортного средства.
8. Система (10) тяги по п.1, содержащая по меньшей мере три роликовых элемента (268).
9. Система (10) тяги по п.8, в которой три ролика (268) расположены между собой под углом 120 градусов.
10. Система (10) тяги по п.1, дополнительно содержащая комплементарный диск (269, 271), помещенный между фрикционным диском (266, 270) и роликовыми элементами (268), и осевой кулачок (280), передающий крутящий момент между фрикционным диском (266, 270) и комплементарным диском (269, 271) и имеющий такую форму, что при передаче крутящего момента на роликовые элементы (268) предоставляется предварительная нагрузка.
11. Система (10) тяги по п.2, в которой входной и выходной фрикционные диски (266, 270) соединены с соответствующим элементом (102, 110) второго дифференциального устройства (42).
12. Система (10) тяги по п.11, в которой первое дифференциальное устройство (34) содержит первый элемент (50), соединенный со вторым дифференциальным устройством (42), второй элемент (118), соединенный со вторым источником (18), и третий элемент (130), соединенный с осью (30) транспортного средства.
13. Система (10) тяги по п.2, содержащая устройство (62) управления, связанное для работы с устройством (246) бесступенчатого регулирования скорости таким образом, что передаточное отношение между входным и выходным фрикционными дисками (266, 270) изменяется в зависимости от условий движения транспортного средства.
14. Система (10) тяги по п.2, содержащая по меньшей мере три роликовых элемента (268).
15. Система (10) тяги по п.2, дополнительно содержащая комплементарный диск (269, 271), помещенный между фрикционным диском (266, 270) и роликовыми элементами (268), и осевой кулачок (280), передающий крутящий момент между фрикционным диском (266, 270) и комплементарным диском (269, 271) и имеющий такую форму, что при передаче крутящего момента на роликовые элементы (268) предоставляется предварительная нагрузка.
16. Система (10) тяги по п.4, в которой входной и выходной фрикционный диски (266, 270) соединены с соответствующим элементом (102, 110) второго дифференциального устройства (42).
17. Система (10) тяги по п.16, в которой первое дифференциальное устройство (34) содержит первый элемент (50), соединенный со вторым дифференциальным устройством (42), второй элемент (118), соединенный со вторым источником (18), и третий элемент (130), соединенный с осью (30) транспортного средства.
18. Система (10) тяги по п.4, содержащая устройство (62) управления, связанное для работы с устройством (246) бесступенчатого регулирования скорости таким образом, что передаточное отношение между входным и выходным фрикционными дисками (266, 270) изменяется в зависимости от условий движения транспортного средства.
19. Система (10) тяги по п.4, содержащая по меньшей мере три роликовых элемента (268).
20. Система (10) тяги по п.4, дополнительно содержащая комплементарный диск (269, 271), помещенный между фрикционным диском (266, 270) и роликовыми элементами (268), и осевой кулачок (280), передающий крутящий момент между фрикционным диском (266, 270) и комплементарным диском (269, 271) и имеющий такую форму, что при передаче крутящего момента на роликовые элементы (268) предоставляется предварительная нагрузка.
| WO 2011092643 A1, 04.08.2011 | |||
| US 6416439 B1, 09.07.2002 | |||
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2464182C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ (ВАРИАНТЫ) | 2011 |
|
RU2483940C1 |

