Область техники
Изобретение относится к авиационной технике, более конкретно - к аппаратам тяжелее воздуха, а именно, выполненным по аэродинамическим схемам «утка» или «тандем», оно может быть использовано в конструкции самолетов, в основном, транспортного назначения, для упрощения технологии их производства.
Предшествующий уровень техники
Несмотря на то, что первый летающий самолет был выполнен именно по схеме «утка», эта схема не получила широкого распространения по настоящее время. Причиной тому служит чрезвычайная сложность, а порой, и невозможность использования средств для увеличения подъемной силы крыла или, иначе говоря, механизации крыла. Достаточно заметить, что во всех удачно осуществленных проектах «уток» знаменитого конструктора Рутана (Elbert Rutan) крыло не имело даже такой элементарной механизации, как простой закрылок. В скоростных маневренных реактивных самолетах схемы "утка", например, "Гриппен" (Швеция), "Рафаль" (Франция), "Тайфун" (Европа) и других, этот недостаток схемы «утка» устраняется за счет использования весьма сложных автоматических систем управления и устойчивости.
Помимо того, что эти системы обладают весьма внушительной стоимостью, они требуют для их обслуживания персонала с очень высокой квалификацией. Достаточно сказать, что только аппаратура для тестирования таких систем обходится в миллион долларов США.
Пассажирские и транспортные самолеты должны обязательно обладать определенным запасом статической устойчивости и это обстоятельство в настоящее время препятствует использованию в «утках» современных средств механизации крыла.
В дальнейшем будем рассматривать только статически устойчивые самолеты. Причины невозможности использования механизации крыла в статически устойчивых «утках» заключаются в следующем.
Момент тангажа подъемной силы крыла относительно центра масс самолета должен уравновешиваться моментом тангажа подъемной силы дестабилизатора.
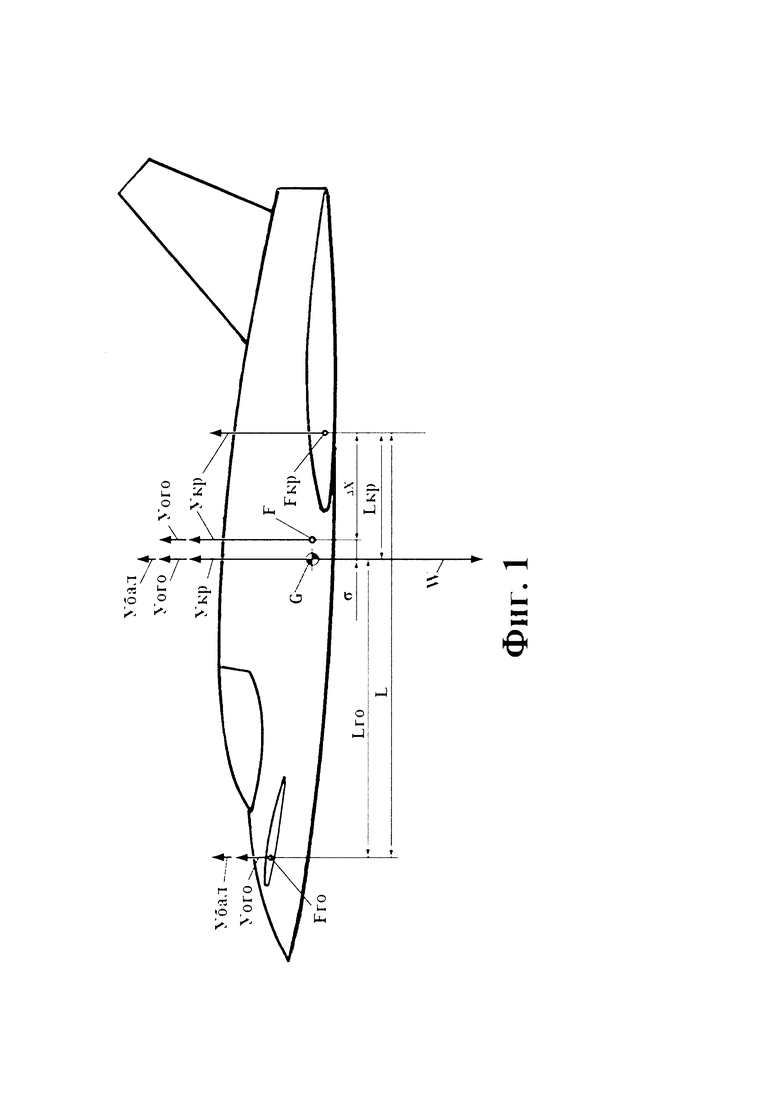
На фиг. 1 представлена схема подъемных сил, действующих на самолет в установившемся крейсерском горизонтальном полете.
Здесь литерой Укр обозначена подъемная сила крыла, приложенная в фокусе Fкp крыла. Фокусом называется точка приложения приращений подъемных сил, вызванных изменением угла атаки аэродинамической поверхности или летательного аппарата.
Подъемная сила дестабилизатора Уго складывается из силы УOго, возникающей при угле атаки, равном углу атаки крыла (самолета) и приложенной в фокусе Fгo дестабилизатора. Сила УОго является частью равнодействующей силы У, приложенной в точке F, являющейся фокусом самолета. Другой составляющей силы У является подъемная сила Укр крыла. Силы Укр и УОго имеют одну и ту же природу, а именно являются следствием увеличения угла атаки крыла и дестабилизатора с угла, при котором крыло и дестабилизатор имеют нулевую подъемную силу, до крейсерского угла атаки крыла.
Поскольку угол установки дестабилизатора превышает угол установки крыла, то за счет разности углов атаки дестабилизатора и самолета, на дестабилизаторе возникает дополнительная сила, обозначаемая, Как Убал, именующаяся балансировочной, и приложена она в фокусе Fгo дестабилизатора. Эта сила не входит в равнодействующую силу У, приложенную в фокусе F самолета.
Центр G масс самолета расположен впереди фокуса F самолета на расстоянии σ, составляющем 5-10 процентов от средней аэродинамической хорды (САХ) крыла. Это расстояние называют запасом устойчивости по перегрузке. В центре G масс приложена направленная вниз сила W тяжести самолета.
В связи с тем, что сила У и сила W тяжести самолета разнонаправлены и приложены в разных точках, возникает пикирующий момент, и этот момент компенсируется моментом балансировочной силы Убал. Этот же момент дополнительно компенсирует и нулевой пикирующий момент крыла (момент крыла при его нулевой подъемной силе).
Сумма сил Укр, УОго и Убал по модулю равна силе W тяжести самолета.
Эти данные приведены с целью максимально прояснить физику балансировки самолета схемы «утка».
Соотношение плеча Lгo подъемной силы дестабилизатора и плеча Lкр крыла у рассматриваемой «утки» таково, что оно накладывает ограничение на максимальную подъемную силу крыла. При этом на больших углах атаки, например, посадочных и маневренных, т.е. при полностью отклоненных рулях высоты, подъемная сила дестабилизатора используется полностью. Использовать подъемную силу крыла настолько, насколько это допускают современные средства механизации крыла, не позволяет слишком большое плечо подъемной силы крыла.
Учитывая, что
и подавляющую часть плеча Lкр подъемной силы крыла составляет расстояние  между фокусами крыла и самолета, подробно рассмотрим эту величину, которую обычно называют смещением фокуса.
между фокусами крыла и самолета, подробно рассмотрим эту величину, которую обычно называют смещением фокуса.
В первом приближении смещение фокуса прямо пропорционально произведению расстояния между фокусами крыла и дестабилизатора на отношение площадей дестабилизатора и крыла. Дополнительно, и это очень важно, смещение фокуса растет вместе с ростом производной по углу атаки коэффициента подъемной силы дестабилизатора. Сказанное математически выражается следующей формулой:
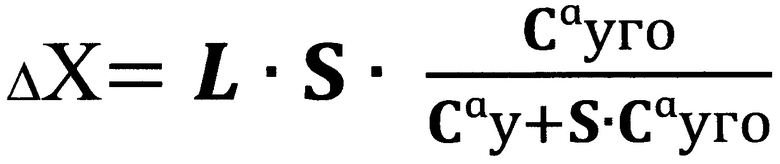
где - расстояние между фокусами крыла и самолета (смещение фокуса);
L - расстояние между фокусами крыла и дестабилизатора
S - отношение площадей дестабилизатора и крыла;
Сαуго; Сαу - производные по углу атаки коэффициентов подъемной силы для дестабилизатора и крыла соответственно. Они показывают на сколько возрастает коэффициент подъемной силы поверхности при увеличении ее угла атаки на один градус. В дальнейшем для краткости будем их называть производная дестабилизатора и производная крыла.
Из приведенной формулы ясно видно, что ни увеличением площади дестабилизатора, ни увеличением расстояния между фокусами крыла и дестабилизатора ситуацию не улучшить, поскольку с их увеличением растет и смещение фокуса, а значит, и плечо крыла. Но также явно следует: если существенно уменьшить производную по углу атаки коэффициента подъемной силы дестабилизатора, то существенно уменьшается плечо подъемной силы крыла; и если удастся значительно снизить указанную производную дестабилизатора, то это позволит использовать современные средства механизации крыла.
Для снижения указанной производной Сαуго предложено выполнять дестабилизатор по бипланной схеме согласно патентам РФ №№2000251, 2256587, 2547101. Но бипланная схема приводит к увеличению индуктивного сопротивления дестабилизатора.
В качестве ближайшего аналога принят самолет по патенту РФ №2609644 «Летательный аппарат схемы «флюгерная утка» (КРАСНОВ-УТКА)», стр. 11 строки 33-48, в котором дестабилизатор выполнен во флюгерном варианте, и имеет производную, близкую к нулю. Крыло данного аппарата, как и положено для «утки», размещенное позади центра масс, снабжено средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата. Такое выполнение крыла уменьшает до нуля его производную по углу атаки.
Но, если обе поверхности имеют близкую к нулю производную, то стабилизирующий момент летательного аппарата также будет равен нулю и аппарат будет неустойчив. Кроме того, флюгерный вариант дестабилизатора требует усложнения технология производства самолетов, поскольку дестабилизатор должен быть связан с фюзеляжем шарнирно, а не, как обычно - жестко.
Таким образом, можно заключить, что известные летательные аппараты с двумя несущими поверхностями и малой производной передней несущей поверхности обладают статической неустойчивостью, а технология их производства обладает увеличенной сложностью.
Раскрытие изобретения
Задачей настоящего изобретения является создание такого летательного аппарата с двумя несущими поверхностями, который обладал бы статической устойчивостью и вследствие упрощения его конструкции позволил бы существенно упростить технологию его производства.
Эта задача решается тем, что в летательном аппарате, содержащем две несущие поверхности, связанные с фюзеляжем, при этом, по крайней мере, одна из них снабжена средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата, обе несущие поверхности жестко связаны с фюзеляжем; поверхность, снабженная средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата, размещена впереди центра масс летательного аппарата; при этом производная по углу атаки коэффициента подъемной силы поверхности, расположенной позади центра масс, равна или не более чем в двадцать раз меньше производной у аналогичной поверхности, не имеющей средства регулирования подъемной силы, зависящего от изменения угла атаки.
Это позволяет надежно обеспечить устойчивость полета и значительно упростить технологию производства летательного аппарата.
Краткое описание чертежей
В дальнейшем патентуемое изобретение поясняется конкретными примером его осуществления и прилагаемыми чертежами.
Фиг. 1 представляет схему подъемных сил, действующих на самолет в установившемся крейсерском горизонтальном полете;
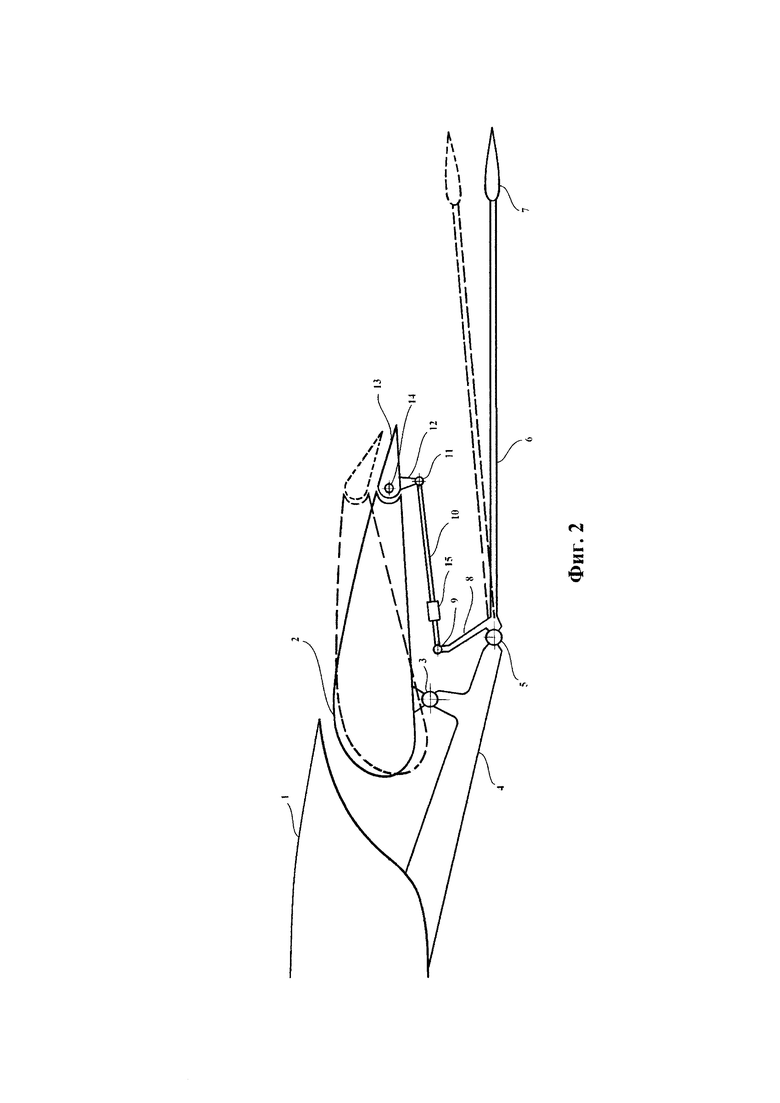
на фиг. 2 представлен вариант дестабилизатора, снабженного средством регулирования его подъемной силы в виде руля высоты, изменение угла отклонения которого, находится в функциональной зависимости от изменения угла атаки летательного аппарата.
Лучший вариант осуществления изобретения
Заявляемый летательный аппарат выполнен по аэродинамической схеме «утка», он содержит две несущие поверхности в виде механизированного крыла, размещенного позади центра масс летательного аппарата, и дестабилизатора, размещенного впереди центра масс. Обе несущие поверхности жестко связаны с фюзеляжем. Дестабилизатор снабжен средством регулирования его подъемной силы в виде руля высоты, изменение угла отклонения которого, находится в функциональной зависимости от изменения угла атаки летательного аппарата
На фиг. 2 представлен жестко связанный с фюзеляжем (на чертеже не показанном) дестабилизатор 1 предлагаемого летательного аппарата. Он снабжен средством изменения его подъемной силы в виде руля 2 высоты, который с помощью шарнира 3 укреплен на кронштейне 4, жестко связанном с дестабилизатором 1. На этом же кронштейне 4 с помощью шарнира 5 размещена штанга 6, на заднем конце которой жестко закреплен серворуль 7. На переднем конце штанги 6, рядом с шарниром 5 жестко закреплен рычаг 8, верхний конец которого посредством шарнира 9 связан с тягой 10. На заднем конце тяги 10 размещен шарнир 11, связывающий ее с рычагом 12 триммера 13 руля 2 высоты. При этом триммер 13 с помощью шарнира 14 укреплен на задней части руля 2 высоты. Муфта 15 изменяет длину тяги 10 под управлением летчика для управления по тангажу.
Представленный дестабилизатор работает следующим образом. При случайном увеличении угла атаки летательного аппарата, например, при входе его в восходящий поток, серворуль 7 отклоняется вверх, что влечет за собой смещение тяги 10 влево, т.е. вперед и приводит к отклонению триммера 13 вниз, в результате руль 2 высоты отклоняется вверх. Положение руля 2 высоты, серворуля 7 и триммера 13 в описанной ситуации представлено на чертеже штриховыми линиями. В итоге увеличение подъемной силы дестабилизатора 1 вследствие увеличения угла атаки будет до некоторой степени снивелировано отклонением вверх руля 2 высоты. Степень этого нивелирования зависит от соотношения углов отклонения серворуля 7 и руля 2 высоты. И это соотношение задается длиной рычагов 8 и 12. При уменьшении угла атаки руль 2 высоты отклоняется вниз, и подъемная сила дестабилизатора 1 увеличивается, нивелируя уменьшение угла атаки.
Таким образом достигается снижение производной Сαуго дестабилизатора по сравнению с классической «уткой».
В связи с тем, что серворуль 7 и триммер 13 кинематически связаны между собой, они балансируют друг друга. Если этой балансировки недостаточно, то необходимо включить в конструкцию балансировочный груз, который необходимо разместить либо внутри серворуля 7, либо на продолжении штанги 6 впереди шарнира 5. Руль 2 высоты также должен быть отбалансирован.
Поскольку производная по углу атаки несущей поверхности примерно в два раза превышает производную по углу отклонения закрылка, то при двукратном превышении угла отклонения руля 2 высоты по сравнению с углом отклонения серворуля 7 возможно достичь значения производной Сαуго дестабилизатора близкого к нулю.
Как можно видеть, возможно получить такие же результаты, как и у «флюгерной утки» используя лишь традиционные технологии производства самолетов.
Величина производной дестабилизатора должна выбираться в зависимости от параметров крыла и желательного положения центра масс конкретного самолета. Анализ расчетов самолета классической «утки» показывает, что для достижения оптимальной загрузки дестабилизатора, т.е. примерно равной загруженности крыла, необходимо снизить производную классического дестабилизатора до уровня в 40-70 процентов.
В случае применения гидропривода, триммер 13 исключают из конструкции, а серворуль 7 соединяют с управляющим клапаном гидросистемы, которая и отклоняет руль 2 высоты.
Серворуль 7 не обязательно размещать позади дестабилизатора, он может быть расположен, например, и впереди его; главное, чтобы была обеспечена его связь с рулем 2 высоты.
Изобретение возможно использовать не только в схеме «утка», но, и в схеме «тандем». В этом случае роль руля 2 высоты будет выполнять закрылок или элевон переднего крыла. При выполнении закрылка в многозвенном варианте кронштейн 4 следует крепить к предпоследнему звену, а роль руля 2 высоты будет выполнять последнее звено.
Может оказаться целесообразным выполнить самолет, у которого обе несущие поверхности имеют очень маленькую производную. В этом случае передняя поверхность должна иметь производную, близкую к нулю, а значение производной задней поверхности должно быть не более чем в двадцать раз меньше производной аналогичной поверхности, не имеющей средства регулирования подъемной силы, зависящего от изменения угла атаки. Такой самолет будет практически полностью игнорировать вертикальные потоки воздушных масс, и его пассажиры не будут ощущать «болтанки» даже при интенсивной турбулентности атмосферы.
Оценка показывает, что указанная разность производных задней и передней поверхностей обеспечивает необходимый стабилизирующий момент тангажа для устойчивого полета, т.е. обеспечивает продольную статическую устойчивость.
Как можно видеть, на задней несущей поверхности может оказаться целесообразным применять снижение ее производной, а может оказаться - не применять.
Промышленная применимость
Производная передней поверхности патентуемого летательного аппарата аналогична таковой в схеме «флюгерная утка», но предлагаемый аппарат не требует усложнения технологии для его производства.
Сравнительная оценка предлагаемого летательного аппарата с современными самолетами нормальной схемы дает увеличение коммерческой нагрузки на 30% и одновременно с этим экономию горючего в 23%.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СХЕМЫ "ФЛЮГЕРНАЯ УТКА" (КРАСНОВ-УТКА) | 2015 |
|
RU2609644C1 |
| Игнорирующий турбулентность самолет и датчик изменения угла атаки самолета | 2019 |
|
RU2710955C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЛЮГЕРНЫМ ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ | 2015 |
|
RU2609620C1 |
| ФЛЮГЕРНОЕ ГОРИЗОНТАЛЬНОЕ ОПЕРЕНИЕ (КРАСНОВ-ФЛЮГЕР) | 2017 |
|
RU2651959C1 |
| САМОЛЕТ-ТРИПЛАН | 1998 |
|
RU2172706C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288435C1 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| САМОЛЕТ С ПЛАВАЮЩИМИ ЭЛЕРОНАМИ | 1993 |
|
RU2114028C1 |
| САМОЛЁТ С ПЕРЕДНИМ ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ | 2003 |
|
RU2243131C1 |
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
Изобретение относится к летательным аппаратам, выполненным по аэродинамическим схемам «утка» или «тандем». Летательный аппарат содержит две несущие поверхности, связанные с фюзеляжем, одна из которых снабжена средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата. Обе несущие поверхности жестко связаны с фюзеляжем. Поверхность, снабженная средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата, размещена впереди центра масс летательного аппарата. Производная по углу атаки коэффициента подъемной силы поверхности, расположенной позади центра масс, равна или не более чем в двадцать раз меньше производной у аналогичной поверхности, не имеющей средства регулирования подъемной силы, зависящего от изменения угла атаки. Изобретение направлено на обеспечение продольной устойчивости и упрощение технологии производства самолетов. 2 ил.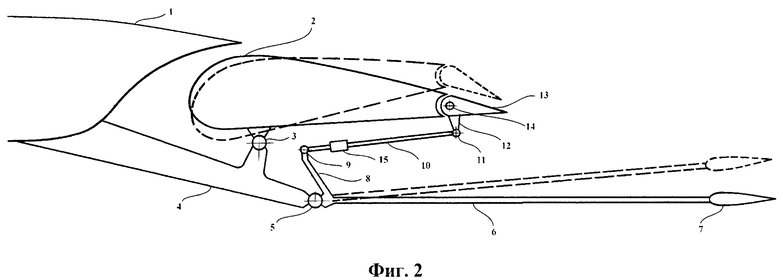
Летательный аппарат, содержащий две несущие поверхности, связанные с фюзеляжем, при этом по крайней мере одна из них снабжена средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата, отличающийся тем, что обе несущие поверхности жестко связаны с фюзеляжем; поверхность, снабженная средством регулирования подъемной силы, находящимся в функциональной зависимости от изменения угла атаки летательного аппарата, размещена впереди центра масс летательного аппарата; при этом производная по углу атаки коэффициента подъемной силы поверхности, расположенной позади центра масс, равна или не более чем в двадцать раз меньше производной у аналогичной поверхности, не имеющей средства регулирования подъемной силы, зависящего от изменения угла атаки.
| Устройство для передачи на расстояние показаний измерительных приборов | 1947 |
|
SU84686A1 |
| САМОЛЕТ | 1993 |
|
RU2087384C1 |
| US 20160207625 A1, 21.07.2016 | |||
| УСТРОЙСТВО ПРИНУДИТЕЛЬНОГО ПЕРЕДВИЖЕНИЯ НОГ | 2009 |
|
RU2402311C1 |

