Изобретение относится к контрольно-измерительной технике и может быть использовано для визуализации и регистрации механических воздействий (ударов, вибраций) сложной пространственной формы и временной зависимости.
Во многих практических задачах возникает потребность в регистрации и записи характеристик быстроизменяющихся механических воздействий сложной пространственной формы и временной зависимости (например, пространственного распределения и временной зависимости величины напряжений и деформаций возникающих в результате механического воздействия на материалы)
Традиционно для контроля и измерения напряжений и деформаций используют проволочные тензодатчики резистивного типа. В ряде современных методов контроля используются пьезопленочные датчики, которые значительно расширяют динамический и частотный диапазон измерения деформаций по сравнению с резистивными тензодатчиками, а также повышают точность измерений. Примером таких датчиков может служить датчик, в котором в качестве чувствительного элемента используется пьезоэлемент, изготовленный из пьезополимерной пленки на основе поливинилиденфторида (1).
Однако с помощью тензорезистивных и пьезопленочных датчиков можно контролировать деформации только в "локальных" участках поверхности, а для того чтобы иметь информацию о распределении механических воздействий на достаточно большой площади поверхности нагружаемого объекта, необходимо использовать одновременно большое число датчиков, к тому же трудно обеспечить надежный контакт с поверхностью обьекта.
Известны оптические-интерференционные (2) и оптические-проекционные (3) методы контроля и измерения распределения деформаций. В этих методах на поверхность исследуемого обьекта наносится определенная система меток. Изображение поверхности с системой меток проецируется на CCD камеру и запоминается. После нагружения обьекта поверхность с метками снова проецируется и запоминается CCD-камерой. Далее проводят сравнение положения меток и по степени их искажения определяют величину деформации. Недостатком указанных оптических методов является то, что эти методы пригодны в основном для плоских поверхностей, а точность измерений зависит от точности совмещения изображений и точности последующих расчетов.
Известен также способ регистрации ударных нагрузок с помощью пленочного механолюминесцентного датчика, чувствительным элементом в котором является суспензия из механолюминесцирующего в видимой области спектра мелкодисперсного порошка ZnS:Mn2+ и прозрачного связующего (4).
В работе [5] для регистрации и измерения динамических деформаций был предложен пленочный механолюминесцентный сенсорный элемент на основе композита SrAl2O4:Eu2+/полимер, полученный в результате полимеризации суспензии из механолюминесцирующего мелкодисперсного порошка SrAl2O4:Eu2+ и смолы. Было установлено, что интенсивность свечения такого сенсорного элемента пропорциональна величине деформации, поэтому по интенсивности свечения элемента можно было судить о величине напряжений и деформаций поверхности обьекта.
Недостатком указанных способов изготовления сенсора для регистрации механических воздействий является то, что чувствительным элементом (сенсором) является механолюминесцирующая пленка, которая наносится на поверхность подложки (или объекта), при этом важно чтобы пленка обладала хорошей адгезией с поверхностью подложки (или обьекта), в противном случае пленка может отслоиться и потрескаться при механическом воздействии. Использование гибких (или пластичных) механолюминесцирующих пленок нецелесообразно ввиду малой эффективности возбуждения механолюминесценции в таких пленках.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является способ описанный в работе [6].
В этом способе слой механолюминесцирующего порошка находится между двумя прозрачными в видимой области спектра тонкими пластинами из этилентерефталата. На внутренние поверхности этих пластин наносились пленки из липкого материала (термопластичный этиленвинилацетатный сополимер) которые выполняли роль связующих для фиксации порошка люминофора между пластинами. Механические воздействия осуществляются с внешней стороны пластины.
Недостатком указанного способа создания механолюминесцентных сенсоров для визуализации и регистрации механических воздействий является то, что толщина слоя порошка при механическом воздействии может меняться, так как липкая пленка (термопластик) недостаточно жестко фиксирует весь слой порошка люминофора, что приведет к неконтролируемому изменению интенсивности свечения механолюминесцирующего порошка. Кроме того, защитная пластика, связующая пленка и слой порошка люминофора образуют многослойную структуру, в которой происходят дополнительное поглощение и отражение на границах раздела сред, что приводит к потери интенсивности механолюминесценции. Также возможно разрушение гранул порошка люминофора при механическом воздействии, что приводит к изменению чувствительности и интенсивности свечения механолюминесцирующего порошка.
Целью предлагаемого изобретения является разработка способа создания механолюминесцирующих покрытий (сенсоров) для визуализации и измерения механических воздействий, который лишен указанных недостатков.
Техническим результатом является получение надежных, имеющих большой рабочий ресурс механолюминесцирующих покрытий (сенсоров) для визуализации и измерения механических воздействий произвольной формы и временной зависимости.
Поставленная цель и полученный технический результат достигаются в результате того, что в способе создания механолюминесцирующих сенсорных элементов для визуализации и измерения полей динамических механических напряжений и ударных нагрузок, заключающимся в том, что чувствительный к механическим воздействиям механолюминесцирующий композиционный слой формируют путем растворения поверхностного слоя прозрачной в видимой области спектра подложки из полиметилметакрилата в дихлорэтане и внедрения в получившейся раствор микрочастиц порошка люминофора SrAl2O4:(Eu2+,Dy3+), через 10-15 минут после образования жидкого слоя полиметилметакрилата в дихлорэтане на поверхность названного раствора наносят тонкий слой механолюминесцирующего мелкодисперсного порошка люминофора SrAl2O4:(Eu2+,Dy3+) толщиной 20-200 мкм. Затем накрывают этот слой ровной и гладкой пластиной из материала, не растворяющегося в дихлорэтане, обеспечивая тем самым в результате диффузии микрочастиц люминофора в раствор в поверхностном слое прозрачной подложки из полиметилметакрилата формирование чувствительного к механическим воздействиям механолюминесцирующего композиционного слоя на основе полиметилметакрилата и механолюминесцирующего порошка люминофора SrAl2O4:(Eu2+,Dy3+) толщиной 30-250 мкм, после затвердевания жидкого поверхностного слоя пластину снимают. В качестве гладкой пластины возможно применение пластины из стекла, например оконного. Средний размер использованных частиц порошка люминофора составляет 15-20 мкм.
Применение предлагаемого способа иллюстрируется фиг. 1 и 2.
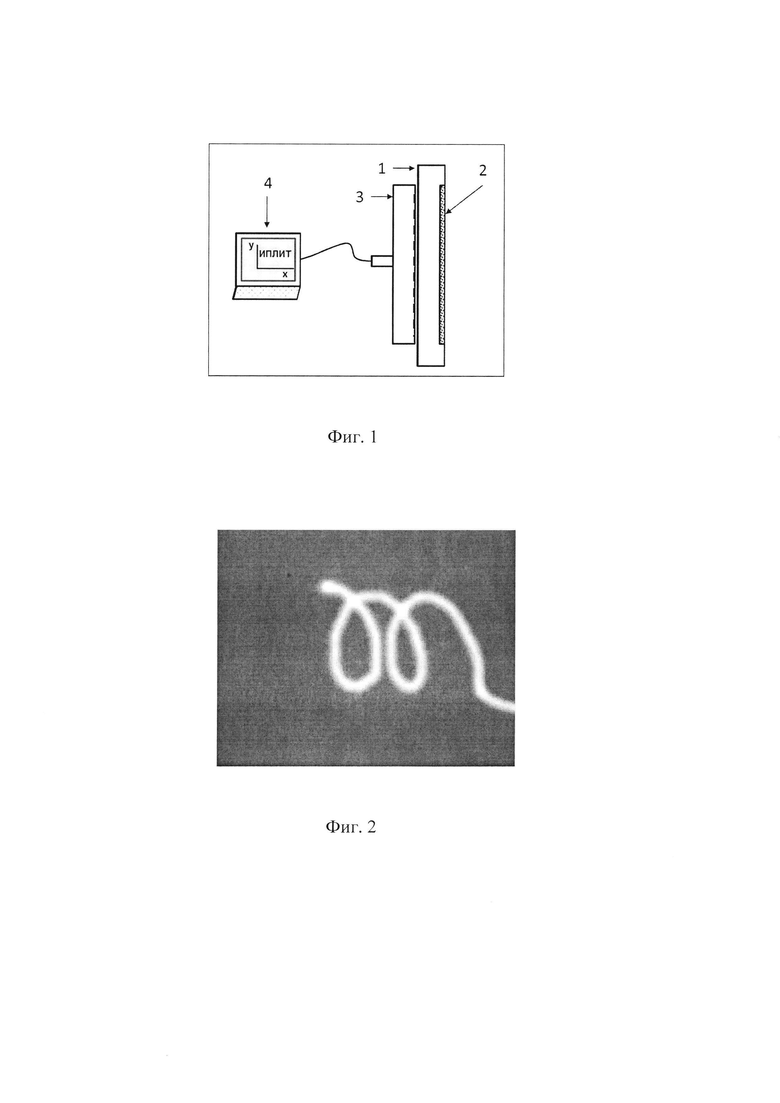
Фиг. 1. Схема устройства для визуализации и регистрации механических воздействий, в котором поверхностный слой композиционного материала получен предлагаемым способом.
Фиг. 2. Фотография светящейся траектории скольжения стилуса по поверхности механолюминесцирующего (сенсорного) слоя.
На Фиг. 1 - выполняющая функцию подложки пластинка 1 из полиметилметакрилата содержит слой 2, являющийся сенсором механических воздействий, сигнал от которой поступает на ПЗС матрицу 3. Полученная от ПЗС матрицы информация обрабатывается на компьютере 4.
На Фиг. 2 в качестве примера показана визуализация траектории скольжения (следа) по поверхности механолюминесцирующего слоя 2 предмета подобного стилусу или обычной шариковой ручке при воздействии рукой. Свечение (механолюминесценция) регистрируется с помощью ПЗС матрицы установленной с обратной стороны подложки. Результаты измерений выводятся на компьютер для дальнейшей обработки.
Пример реализации предлагаемого способа.
Чувствительный к механическим воздействиям механолюминесцирующий композиционный слой формируют непосредственно в поверхностном слое прозрачной в видимой области спектра материала самой подложки (т.е. не так как в прототипе). Материалом подложки был выбран прозрачный в видимой области спектра полиметилметакрилат. Формирование механолюминесцирующего слоя выполняли следующим образом.
Предварительно на поверхность пластины была наклеена рамка размерами 50×50 мм и толщиной Δh2≈2 мм, (возможно использование рамок других размеров) из материала, не растворяющегося в дихлорэтане. В результате была образована ванна глубиной Δh2≈2 мм. В эту ванну залили слой дихлорэтана толщиной Δh2≈1-2 мм. В результате этого начиналось растворение поверхностного слоя полиметилметакрилата в дихлорэтане и на поверхности твердой полиметилметакрилатной пластины был образован жидкий слой раствора полиметилметакрилата в дихлорэтане. Через 10-15 минут на поверхность жидкого слоя раствора полиметилметакрилата равномерно наносили тонкий слой механолюминесцирующего мелкодисперсного порошка люминофора SrAl2O4:(Eu2+,Dy3+). Сверху названный слой накрыли ровной и гладкой пластиной из материала не растворяющегося в дихлорэтане (можно использовать пластинку из обычного оконного стекла) и слегка прижали пластину небольшим грузиком. Размеры частиц порошка люминофора составляли 0.5-35 мкм. Целесообразно выбирать объем наносимого порошка таким, чтобы толщина слоя порошка на ровной твердой поверхности составляла бы не меньше одного слоя частиц среднего размера (т.е. 15-20 мкм) и не больше 10-15 слоев. Уменьшение средней толщины слоя меньше указанного предела приводит к резкому уменьшению интенсивности сигнала механолюминесценции. Увеличение, также приводит к падению сигнала из-за рассеяния и поглощения света в самом слое.
В результате диффузии микрочастиц люминофора в раствор в поверхностном слое прозрачной подложки из полиметилметакрилата был сформирован чувствительный к механическим воздействиям механолюминесцирующий композиционный слой на основе полиметилметакрилата и механолюминесцирующего порошка люминофора SrAl2O4:(Eu2+,Dy3+) толщиной ≈ 30-250 мкм. После затвердевания жидкого поверхностного слоя пластина была снята.
Так как подложка прозрачная, то свечение (механолюминесценцию), возникающее при воздействии на механолюминесцирующий слой можно регистрировать с обратной стороны подложки, что значительно удобней по сравнению с регистрацией со стороны механолюминесцирующего слоя. В предлагаемом способе механолюминесцирующий сенсорный слой находится в поверхностном слое самого материала подложки, в результате достигается прочная адгезия сенсорного слоя с подложкой и не возникает разрушения чувствительного слоя при механическом воздействии, например ударе, а также нет многослойной структуры создающей дополнительные потери полезного сигнала. Кроме того, материал подложки (полиметилметакрилат) устойчив к воздействию различных газов и жидкостей. Это позволяет использовать сенсоры полученные предлагаемым способом для визуализации и измерения значительно больших механических воздействий (ударов, деформаций) и в разных внешних условиях - на воздухе, в различных газах и в различных жидкостях.
Проведенные испытания устройств, в которых механолюминесцирующий слой был получен предлагаемым способом, показали его промышленную применимость.
Источники информации.
1. Патент RU №2160428, МПК. G01B 7/16, опубл., 10.12.2000.
2. Патент RU №1245875, МПК. G01B 11/16, опубл. 23.07.1986)
3. Патент RU №2162591, МПК. G01B 11/24, G01B 11/16, опубл. 27.01.2001).
4. Патент RU 2305847, МПК. G01P 13/093, опубл., 10.09.2007
5. W.X. Wang, Т. Matsubara, Y. Takao, Y. Imai and C.N. Xu, Smart strain sensor using SrAl2O4:Eu2+/polymer composite film, Proceedings of The 8th China-Japan Joint Conference on Composite Materials, pp 357-360 (2008)., 2008. 10
6. Xiandi Wang, Hanlu Zhang, et al. Dynamic pressure mapping of personalized handwriting by a flexible sensor matrix based on the mechanoluminescence process. Adv. Mater., 2015, vol. 27, Issue 14, p. 2324-2331
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛИЗАЦИИ И КОНТРОЛЯ ДИНАМИЧЕСКИХ ДЕФОРМАЦИЙ ПОВЕРХНОСТИ И УДАРНЫХ НАГРУЗОК | 2010 |
|
RU2443975C1 |
| БЕЛОЕ СВЕТОДИОДНОЕ УСТРОЙСТВО ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2541425C2 |
| МЕХАНОЛЮМИНЕСЦЕНТНЫЙ ДАТЧИК УДАРА | 2006 |
|
RU2305847C1 |
| ФОТОСТИМУЛИРУЕМЫЙ ЛЮМИНОФОР СИНЕ-ЗЕЛЕНОГО ЦВЕТА СВЕЧЕНИЯ НА ОСНОВЕ АЛЮМИНАТА СТРОНЦИЯ | 2012 |
|
RU2516657C2 |
| ХЕМОСЕНСОР ДЛЯ ОПРЕДЕЛЕНИЯ АММИАКА, МЕТИЛАМИНА И ДИМЕТИЛАМИНА В АТМОСФЕРЕ ВОЗДУХА | 2023 |
|
RU2812665C1 |
| КОМПОЗИЦИОННЫЙ ЛЮМИНЕСЦИРУЮЩИЙ МАТЕРИАЛ ДЛЯ ТВЕРДОТЕЛЬНЫХ ИСТОЧНИКОВ БЕЛОГО СВЕТА | 2009 |
|
RU2511030C2 |
| ТЕРМОЛЮМИНЕСЦЕНТНАЯ И СУПЕРПАРАМАГНИТНАЯ КОМПОЗИЦИОННАЯ ЧАСТИЦА И МАРКИРОВКА, СОДЕРЖАЩАЯ ЕЕ | 2016 |
|
RU2712685C2 |
| ЛЮМИНОФОРЫ НА ОСНОВЕ СИЛИКАТА ЩЕЛОЧНОЗЕМЕЛЬНОГО МЕТАЛЛА И СПОСОБ ПОВЫШЕНИЯ ИХ ДОЛГОВРЕМЕННОЙ СТАБИЛЬНОСТИ | 2010 |
|
RU2507233C2 |
| ПОЛИМЕРНАЯ ЛЮМИНЕСЦЕНТНАЯ КОМПОЗИЦИЯ ДЛЯ УВЕЛИЧЕНИЯ ЭФФЕКТИВНОСТИ РАБОТЫ ФОТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2019 |
|
RU2747603C2 |
| Способ обнаружения ударных повреждений конструкции | 2016 |
|
RU2645431C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для создания элементов визуализации, записи и исследования механических воздействий сложной пространственной формы в зависимости от времени. Заявленный способ создания механолюминесцирующих сенсорных элементов для визуализации и измерения полей динамических механических напряжений и ударных нагрузок заключается в том, что чувствительный к механическим воздействиям механолюминесцирующий композиционный слой формируют путем растворения поверхностного слоя прозрачной в видимой области спектра подложки из полиметилметакрилата в дихлорэтане и внедрения в получившийся раствор микрочастиц порошка люминофора SrAl2O4:(Eu2+, Dy3+). При этом через 10-15 минут после образования жидкого слоя полиметилметакрилата в дихлорэтане на поверхность названного раствора наносят тонкий слой механолюминесцирующего мелкодисперсного порошка люминофора SrAl2O4:(Eu2+, Dy3+) толщиной 20-200 мкм, а затем сверху накрывают этот слой ровной и гладкой пластиной из материала, не растворяющегося в дихлорэтане, обеспечивая тем самым в результате диффузии микрочастиц люминофора в раствор в поверхностном слое прозрачной подложки из полиметилметакрилата формирование чувствительного к механическим воздействиям механолюминесцирующего композиционного слоя на основе полиметилметакрилата и механолюминесцирующего порошка люминофора SrAl2O4:(Eu2+, Dy3+) толщиной 30-250 мкм. После затвердевания жидкого поверхностного слоя пластину снимают. Технический результат - получение надежных, имеющих большой рабочий ресурс механолюминесцирующих покрытий (сенсоров) для визуализации и измерения механических воздействий произвольной формы и временной зависимости. 2 з.п. ф-лы, 2 ил.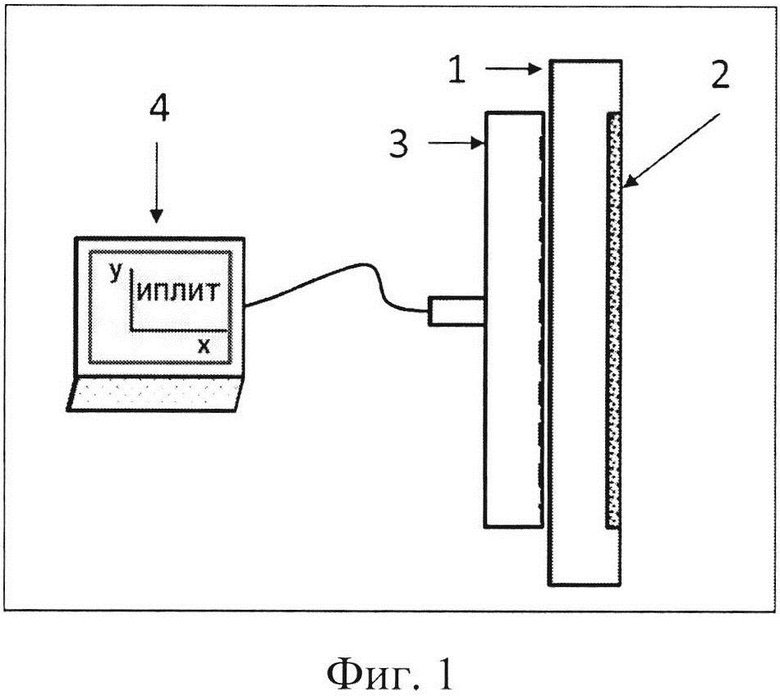
1. Способ создания механолюминесцирующих сенсорных элементов для визуализации и измерения полей динамических механических напряжений и ударных нагрузок, заключающийся в том, что чувствительный к механическим воздействиям механолюминесцирующий композиционный слой формируют путем растворения поверхностного слоя прозрачной в видимой области спектра подложки из полиметилметакрилата в дихлорэтане и внедрения в получившийся раствор микрочастиц порошка люминофора SrAl2O4:(Eu2+, Dy3+), отличающийся тем, что через 10-15 минут после образования жидкого слоя полиметилметакрилата в дихлорэтане на поверхность названного раствора наносят тонкий слой механолюминесцирующего мелкодисперсного порошка люминофора SrAl2O4:(Eu2+, Dy3+) толщиной 20-200 мкм, а затем сверху накрывают этот слой ровной и гладкой пластиной из материала, не растворяющегося в дихлорэтане, обеспечивая тем самым в результате диффузии микрочастиц люминофора в раствор в поверхностном слое прозрачной подложки из полиметилметакрилата формирование чувствительного к механическим воздействиям механолюминесцирующего композиционного слоя на основе полиметилметакрилата и механолюминесцирующего порошка люминофора SrAl2O4:(Eu2+, Dy3+) толщиной 30-250 мкм, после затвердевания жидкого поверхностного слоя пластину снимают.
2. Способ по п. 1, отличающийся тем, что в качестве гладкой пластины применяют пластину из стекла, например оконного.
3. Способ по п. 1, отличающийся тем, что средний размер частиц порошка люминофора составляет 15-20 мкм.
| СПОСОБ ВИЗУАЛИЗАЦИИ И КОНТРОЛЯ ДИНАМИЧЕСКИХ ДЕФОРМАЦИЙ ПОВЕРХНОСТИ И УДАРНЫХ НАГРУЗОК | 2010 |
|
RU2443975C1 |
| US 20010017059 A1, 30.08.2001 | |||
| RU 2006150355 C1, 20.02.2006 | |||
| US 20010008445 A1, 19.07.2001 | |||
| JP 10130639 A, 19.05.1998 | |||
| Способ определения механических напряжений | 1989 |
|
SU1656319A1 |

