Группа изобретений относится к измерительной технике и может быть использована для восстановления эксплуатационной работоспособности пьезоэлектрического преобразователя пространственной вибрации с возможно возникшей неисправностью одного из его измерительных каналов.
Как правило, для измерения пространственной вибрации в жестких условиях (широкие динамический и частотный диапазоны, высокие и низкие температуры, влажность и пр.) применяются пьезоэлектрические вибропреобразователи, которые обладают рядом преимуществ перед иными типами вибропреобразователей (индукционными, вихретоковыми, емкостными, маятниковыми и т.д.) [См., например, Вибрации в технике: Справочник. В 6-ти т. / Ред. совет: В.Н. Челомей (пред.). - М.: Машиностроение, 1981 - Т. 5. Измерения и испытания. - под ред. М.Д. Генкина. 1981. - с 220-226].
В процессе эксплуатации на пьезоэлектрический вибропреобразователь действует большое количество влияющих факторов как внешнего (температурные, электрические, магнитные поля, ударные нагрузки и т.д.) так и внутреннего характера (старение пьезокерамики, ослабление крепежных винтовых соединений, нарушение электрических контактов в самом вибропреобразователе и в соединительных кабелях и т.д.). Все это может привести к тому, что в процессе эксплуатации такой параметр пьезоэлектрического вибропреобразователя, как коэффициент преобразования изменится настолько, что выйдет за пределы, установленные эксплуатационными документами. В этом случае информация о действующей на него пространственной вибрации будет недостоверной. Поэтому контроль исправности средств измерения параметров вибрации, ответственных за безопасность работающих, особенно летающих объектов, является важной технико-экономической задачей.
В случае нарушения работоспособности этих средств измерений выдается искаженная информация о вибрационном состоянии работающего объекта, принуждающая операторов принимать решение, неадекватное возникшим обстоятельствам.
Известен четырехкомпонентный пьезоэлектрический преобразователь пространственной вибрации (RU 2602408, G01P 15/09, 20.11.2016, «Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте»), который по назначению и совокупности существенных признаков является наиболее близким аналогом заявляемого устройства.
Известный пьезоэлектрический преобразователь содержит корпус с разъемным контактным выводом, элементы крепления к объекту измерения и размещенную в корпусе ортогональную систему из трех однокомпонентных вибропреобразователей и идентичного четвертого - дополнительного контрольного вибропреобразователя. Ось чувствительности четвертого преобразователя проходит через центр ортогональной системы координат, ориентирована относительно каждой из осей под заданными углами, предпочтительно совмещена с плоскостью, проходящей через вертикальную ось и биссектрису угла между горизонтальными осями ортогональной системы координат, ориентирована под острым углом к вертикальной оси и образует с осями вибропреобразователей ортогональной системы три некомпланарные и неколлинеарные пространственные косоугольные системы координат.
Известен измерительный комплекс для навигационного управления полетом современных летательных аппаратов (RU 2050713, Н05K 10/00, 20.12.1995 «Устройство для контроля и резервирования акселерометров в системе управления летательного аппарата»), включающий пятикомпонентный измерительный комплекс (акселерометрический преобразователь) для измерения кажущегося пространственного ускорения летательного аппарата при изменениях его местоположения в пространстве.
Известное устройство включает пять низкочастотных акселерометров со своеобразной ориентацией осей чувствительности: оси чувствительности трех акселерометров образуют ортогональную систему координат, а оси чувствительности четвертого и пятого акселерометров ориентированы так, что образуют с осями чувствительности акселерометров ортогональной системы комплекса углы не равные нулю.
В отличие от заявляемого технического решения, известное навигационное устройство предназначено для решения другой задачи - снижения массы и габаритов измерительного комплекса и повышения надежности его работы по сравнению с прототипом путем уменьшения количества низкочастотных акселерометров в измерительном комплексе и, несмотря на сходство по количеству акселерометров и на их относительно сходную ориентацию, известное техническое решение по своему навигационному назначению, сущности и достигаемому результату не может быть признано аналогом заявляемого технического решения, предназначенного для измерения пространственной вибрации самого объекта.
Известен способ контроля работоспособности четырехкомпонентного пьезоэлектрического преобразователя пространственной вибрации непосредственно во время его эксплуатации (RU 2602408, G01P 15/09, 20.11.2016, «Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте»), который является наиболее близким аналогом заявляемого способа.
В известном способе контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте реализуются четыре системы координат - ортогональная и три косоугольных.
По известному способу, используемому при определении модуля пространственного вектора вибрации объекта, для контроля работоспособности пьезоэлектрического преобразователя одновременно измеряют и запоминают все значения проекций пространственного вектора вибрации объекта, воздействующего на все четыре компоненты преобразователя - одной ортогональной и трех косоугольных пространственных систем координат. Приводят значения проекций пространственного вектора вибрации объекта в трех косоугольных системах координат к значениям их проекций в ортогональных системах и определяют четыре значения модуля воздействующего вектора вибрации в каждой из этих пространственных систем. Определенные четыре значения модуля воздействующего вектора вибрации суммируют и определяют его среднее арифметическое значение. Определяют отклонение каждого из четырех значений модуля воздействующего вектора вибрации в соответствующей пространственной системе координат от среднего арифметического значения и сравнивают с предварительно заданным предельно допускаемым отклонением. По результатам этих сравнений определяют работоспособность исследуемого пьезоэлектрического преобразователя на работающем объекте.
По существу известный способ контроля работоспособности четырехкомпонентного пьезоэлектрического преобразователя на работающем объекте используется для получения информации о модуле вектора пространственной вибрации, действующей на работающий объект, и об эксплуатационной работоспособности преобразователя до обнаружения возможно возникшей неисправности одного из четырех его измерительных каналов.
К недостаткам известного способа контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте следует отнести его ограниченную эксплуатационную надежность, из-за прекращения получения достоверной информации о вибрационном состоянии работающего объекта после возможного возникновения неисправности любого из четырех измерительных каналов вибропреобразователя.
Задачей, на решение которой направлена заявляемая группа изобретений, является обеспечение возможности продолжения получения достоверной информации об эксплуатационном вибрационном состоянии работающего объекта после возникновения возможной неисправности какого-либо канала пьезоэлектрического преобразователя пространственной вибрации, что повышает его эксплуатационную надежность.
Технический результат, получаемый при осуществлении заявляемой группы изобретений, заключается в том, что после обнаружения возможной неисправности одного из каналов, приводящей к неработоспособности пьезоэлектрического преобразователя пространственной вибрации, обеспечивается возможность восстановления дальнейшей работоспособности преобразователя и продолжение получения достоверной информации об эксплуатационном вибрационном состоянии работающего объекта.
Указанный технический результат достигается при осуществлении заявляемой группы разнообъектных изобретений, образующих единый изобретательский замысел и представляющих собой пятикомпонентный пьезоэлектрический преобразователь пространственной вибрации и способ повышения его эксплуатационной надежности.
Указанный технический результат при осуществлении изобретения достигается тем, что заявляемый пьезоэлектрический преобразователь пространственной вибрации, включающий корпус с разъемным контактным выводом и элементами крепления к объекту измерения и размещенную в корпусе систему из четырех однокомпонентных пьезоэлектрических вибропреобразователей, оси чувствительности трех из которых образуют ортогональную систему координат, а ось чувствительности четвертого - контрольного, проходящая через центр ортогональной системы координат, совмещена с плоскостью, проходящей через вертикальную ось чувствительности преобразователя, ориентирована под известными углами относительно каждой из осей ортогональной системы и образует с ее вибропреобразователями дополнительные, некомпланарные и неколлинеарные пространственные косоугольные трехкомпонентные системы координат, в отличие от известного, заявляемый преобразователь снабжен установленным в корпусе дополнительным контрольным идентичным пятым однокомпонентным пьезоэлектрическим вибропреобразователем, ось чувствительности которого также проходит через центр ортогональной системы и совмещена со своей плоскостью, проходящей через вертикальную ось чувствительности преобразователя, при этом обе оси чувствительности контрольных вибропреобразователей проходят через третий октант, ориентированы относительно горизонтальных осей чувствительности вибропреобразователей ортогональной системы под известными несовпадающими углами, а относительно вертикальной оси - также под углами известными и предпочтительно одинаковыми и совместно с ортогональной системой образуют шесть, некомпланарных и неколлинеарных пространственных косоугольных трехкомпонентных систем координат.
Указанный технический результат при осуществлении изобретения достигается также тем, что заявляемый способ повышения эксплуатационной надежности пьезоэлектрического преобразователя пространственной вибрации, использующий для определения модуля пространственного вектора вибрации объекта одновременное измерение и запоминание всех значений проекций вектора вибрации, воздействующего на оси чувствительности всех компонент, образующих ортогональную и косоугольные пространственные системы координат, приведение расчетных значений проекций с использованием контрольного канала в косоугольных системах координат к значениям их проекций в ортогональной системе и контроль работоспособности преобразователя пространственной вибрации, в отличие от известного способа, расчетные значения проекций пространственного вектора вибрации объекта определяют с использованием двух контрольных каналов в одной ортогональной и шести приведенных косоугольных системах координат, сравнивают полученные приведенные расчетные значения, определенные с помощью двух контрольных каналов, между собой и с соответствующими измеренными значениями ортогональных каналов и по их равенству принимают решение о работоспособности преобразователя, если при сравнении обнаружено равенство между собой только двух приведенных расчетных значений одного из ортогональных каналов, определенных с помощью двух контрольных каналов, при их неравенстве измеренным значениям этого канала и приведенных расчетных значений остальных ортогональных каналов соответствующим измеренным значениям, то устанавливают неисправность ортогонального канала, расчетные значения которого, определенные с помощью двух контрольных каналов, равны друг другу, если же при сравнении обнаружено равенство всех приведенных расчетных значений ортогональных каналов, определенных с помощью одного из контрольных каналов, измеренным значениям этих каналов и соответствующее неравенство расчетных и измеренных значений, определенных с помощью второго контрольного канала, то устанавливают неисправность второго контрольного канала, отключение которого сохраняет эксплуатационную работоспособность пьезоэлектрического преобразователя, в случае установления возможной неисправности ортогонального канала при определении модуля пространственного вектора вибрации объекта для сохранения эксплуатационной работоспособности пьезоэлектрического преобразователя измеренное значение проекции вектора на ось чувствительности неисправного ортогонального канала меняют на его расчетное значение, определенное по измеренным значениям одного контрольного и остальных исправных ортогональных каналов.
В уровне техники заявитель не обнаружил известных технических решений для повышения эксплуатационной надежности пьезоэлектрических преобразователей пространственной вибрации с заявляемой совокупностью существенных признаков заявляемых устройства и способа для его осуществления.
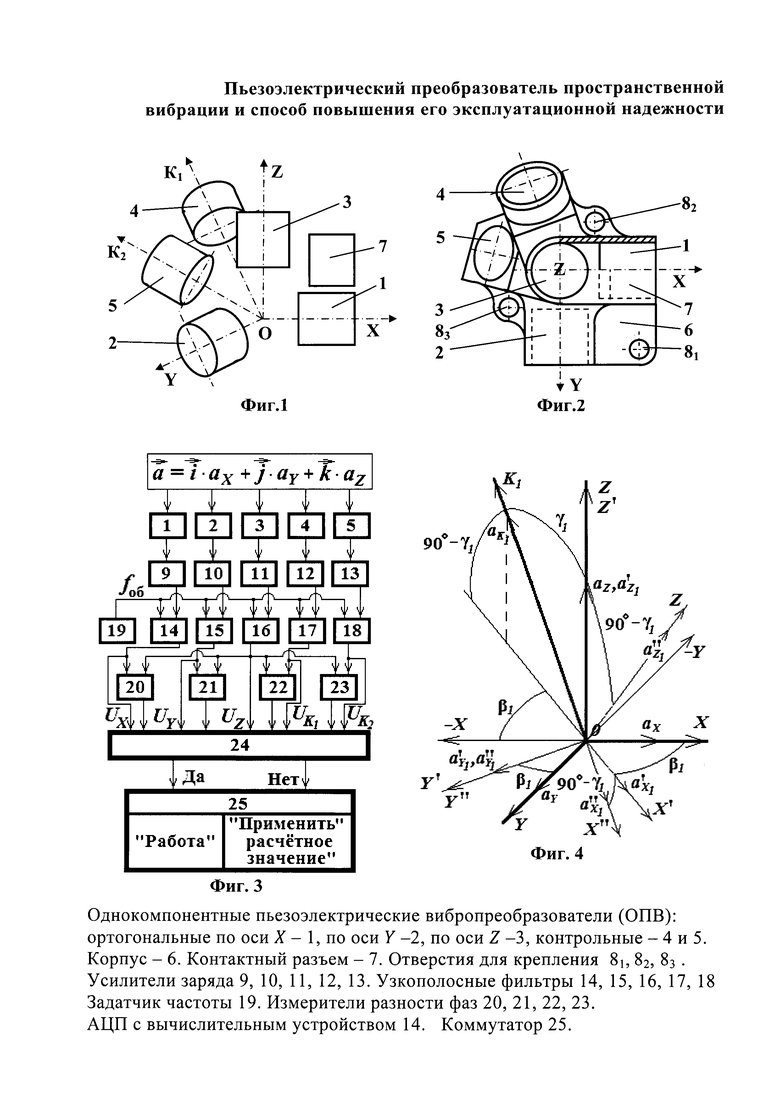
На фиг. 1 изображена схема пространственного расположения пяти однокомпонентных вибропреобразователей и их разъемным контактным выводом заявляемого пьезоэлектрического преобразователя пространственной вибрации (ПППВ). На фиг. 2 изображен корпус предпочтительного исполнения заявляемого ПППВ, вид сверху. На фиг. 3 представлена блок-схема, поясняющая алгоритм обработки информации в соответствии с заявляемым техническим решением. На фиг. 4 приведена схема преобразования координат при определении расчетного значения проекции вектора виброускорения на ось чувствительности X с помощью проекции вектора виброускорения на ось чувствительности контрольного канала K1.
Пьезоэлектрический преобразователь пространственной вибрации (фиг. 1) содержит ортогональную систему XYZ однокомпонентных пьезоэлектрических вибропреобразователей (ОПВ) - по оси X - ОПВ 1, по оси Y - ОПВ 2, по оси Z - ОПВ 3, контрольный четвертый - ОПВ 4 и контрольный пятый - ОПВ 5.
Обе оси чувствительности контрольных ОПВ 4 и ОПВ 5 проходят через третий октант, ориентированы относительно горизонтальных осей чувствительности ОПВ 1 и ОПВ 2 ортогональной системы под известными несовпадающими углами, а относительно вертикальной оси ОПВ 3 - также под углами известными и предпочтительно одинаковыми, например, равными 45°.
ОПВ 1-5 установлены (фиг. 2) в корпусе 6 ПППВ, который снабжен размещенным выше ОПВ 1 разъемным контактным выводом 7 электрических выходов ОПВ и тремя стандартизованно-расположенными отверстиями 81, 82, 83 для крепления к объекту измерения. Каждый из пяти каналов ОПВ 1, 2, 3, 4 и 5 включает (фиг. 3) усилители заряда 9, 10, 11, 12 и 13, узкополосные фильтры 14, 15, 16, 17 и 18, перестраиваемые с помощью задатчика частоты 19. Измерители разности фаз 20-23, измеряющие разность фаз между каналами ОПВ 1, 2, 4 и 5 и каналом ОПВ 3. Кроме того, ПППВ содержит блок 24, объединяющий АЦП и вычислительное устройство, и коммутатор 25.
Способ повышения эксплуатационной надежности пьезоэлектрического преобразователя пространственной вибрации основан на следующих положениях.
У установленного на объекте эксплуатации (на фиг. 1 не показан) ПППВ одновременно измеряют и запоминают значения проекций пространственного вектора вибрации объекта, воздействующего на все пять компонент преобразователя, образующих одну ортогональную и шесть косоугольных пространственных систем координат.
Амплитуды проекций вектора виброускорения, действующие на оси чувствительности ПППВ определяются по следующим формулам:





где  ,
,  ,
,  ,
,  ,
,  - амплитуды проекций вектора виброускорения на оси чувствительности ортогональных X, Y, Z и контрольных каналов ПППВ - K1 и K2 соответственно;
- амплитуды проекций вектора виброускорения на оси чувствительности ортогональных X, Y, Z и контрольных каналов ПППВ - K1 и K2 соответственно;
- kX, kY, kZ,  ,
,  - коэффициенты преобразования каналов X, Y, Z, K1 и K2 соответственно, (в каждый канал X, Y, K1 и K2 включают однокомпонентный пьезоэлектрический вибропреобразователь, согласующий усилитель и измеритель разности фаз, а в канал Z включают однокомпонентный пьезоэлектрический вибропреобразователь и согласующий усилитель);
- коэффициенты преобразования каналов X, Y, Z, K1 и K2 соответственно, (в каждый канал X, Y, K1 и K2 включают однокомпонентный пьезоэлектрический вибропреобразователь, согласующий усилитель и измеритель разности фаз, а в канал Z включают однокомпонентный пьезоэлектрический вибропреобразователь и согласующий усилитель);
-  ,
,  ,
,  ,
,  и
и  - амплитудные значения выходных напряжений каналов X, Y, Z, K1 и K2 соответственно (далее знак амплитудного значения «
- амплитудные значения выходных напряжений каналов X, Y, Z, K1 и K2 соответственно (далее знак амплитудного значения « » опущен, считая, что все расчеты могут проводиться при любых значениях проекций: амплитудных, средних квадратических, средних выпрямленных и т.д.);
» опущен, считая, что все расчеты могут проводиться при любых значениях проекций: амплитудных, средних квадратических, средних выпрямленных и т.д.);
- ϕZX, ϕZY,  ,
,  - значения разностей фаз между сигналами ОПВ каналов Z и X, Z и Y, Z и K1, Z и K2.
- значения разностей фаз между сигналами ОПВ каналов Z и X, Z и Y, Z и K1, Z и K2.
Приводят значения проекций пространственного вектора вибрации объекта в шести косоугольных системах координат (OXYK1; OYZK1, OXZK1, OXYK2; OYZK2; OXZK2) к значениям их проекций в ортогональной системе координат (OXYZ). Для этого с помощью проекций вектора виброускорения на оси чувствительности контрольных каналов  и
и  определяют расчетные значения проекций вектора виброускорения на оси чувствительности ортогональной системы координат (для косоугольных систем координат OXYK1 и OXYK2 на ось чувствительности Z -
определяют расчетные значения проекций вектора виброускорения на оси чувствительности ортогональной системы координат (для косоугольных систем координат OXYK1 и OXYK2 на ось чувствительности Z -  и
и  ; для косоугольных систем координат OYZK1 и OYZK2 на ось чувствительности X -
; для косоугольных систем координат OYZK1 и OYZK2 на ось чувствительности X -  и
и  ; для косоугольных систем координат OXZK1 и OXZK2 па ось чувствительности Y -
; для косоугольных систем координат OXZK1 и OXZK2 па ось чувствительности Y -  и
и  ). Ниже в качестве примера определено расчетное значение проекции вектора виброускорения на ортогональную ось чувствительности X в косоугольной системе координат OYZK1 -
). Ниже в качестве примера определено расчетное значение проекции вектора виброускорения на ортогональную ось чувствительности X в косоугольной системе координат OYZK1 -  (здесь и ниже индекс «1» относится к проекциям, полученным с помощью контрольного канала K1, а индекс «2» - к проекциям, полученным с помощью контрольного канала K2).
(здесь и ниже индекс «1» относится к проекциям, полученным с помощью контрольного канала K1, а индекс «2» - к проекциям, полученным с помощью контрольного канала K2).
Для определения расчетного значения проекции вектора виброускорения на ортогональную ось чувствительности X исходная ортогональная система координат OXYZ разворачивается относительно оси Z на угол β1 и образуется новая система координат OX'Y'Z' (см. фиг. 4) [см., например, Выгодский М.Я. Справочник по высшей математике.
М.: ГИ физико-математической литературы. 1963 - с 197; Иориш Ю.И. Виброметрия. М.: ГНТИ машиностроительной литературы. 1963 - с 69-74].
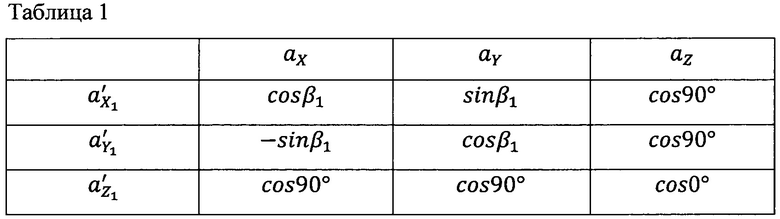
В новой ортогональной системе координат OX'Y'Z' проекции вектора виброускорения  ,
,  и
и  определяют с помощью углов между осями систем координат OXYZ и OX'Y'Z', которые приведены в таблице 1:
определяют с помощью углов между осями систем координат OXYZ и OX'Y'Z', которые приведены в таблице 1:
Следующий поворот осей координат осуществляется относительно оси Y' на угол (90° - γ1) до совмещения осей X' и K1 с образованием новой ортогональной системы координат OX"Y"Z". Проекции вектора виброускорения на оси ортогональной системы координат OX"Y"Z" определяются с помощью углов, приведенных в таблице 2.
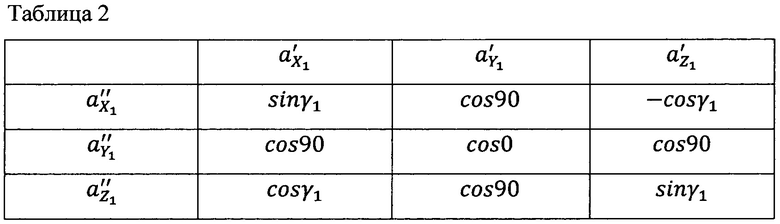
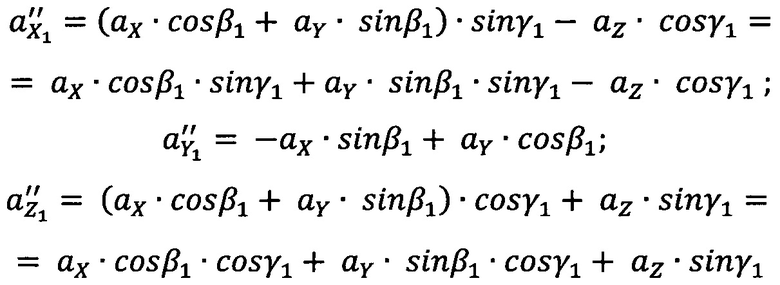
Аналитические выражения проекций вектора виброускорения на оси ортогональной системы координат OX"Y"Z", определенные с помощью таблиц 1 и 2, имеют вид:
Так как проекции вектора виброускорения на оси чувствительности контрольных каналов K1 и K2 ПППВ не зависят от системы координат, в которой они определяются (у всех конечных и промежуточных ортогональных систем координат начало координат в одной точке О), а с отрицательным направлением контрольного канала K1 совмещено положительное направление оси чувствительности X", то
 ,
,
откуда с помощью значения проекции вектора виброускорения на ось чувствительности контрольного канала K1 ( ) определяется расчетное значение проекции вектора виброускорения на ось чувствительности канала X (
) определяется расчетное значение проекции вектора виброускорения на ось чувствительности канала X ( ), определенное с помощью проекции вектора виброускорения на ось чувствительности первого контрольного канала K1:
), определенное с помощью проекции вектора виброускорения на ось чувствительности первого контрольного канала K1:

По аналогии получают расчетные значения проекций вектора виброускорения на оси чувствительности каналов Y и Z в косоугольных системах координат OXZK1 и OXYK1, а также на ось чувствительности K1.
Таким образом, расчетное значение проекции вектора виброускорения на ось чувствительности любого ортогонального канала определяют с помощью измеренных значений проекций на оси чувствительности одного из контрольных каналов и двух остальных ортогональных каналов (последние расчетные значения определяются с помощью измеренных значений проекций вектора виброускорения на оси чувствительности ортогональных каналов). Кроме выражения (6) в косоугольной системе координат OYZK1, в косоугольных системах координат OXZK1 и OXYK1 получаем:



а в трех косоугольных системах координат OYZK2, OXZK2 и OXYK2 -




Модуль вектора виброускорения объекта определяют с помощью измеренных значений проекций на оси чувствительности ортогональных каналов, а в случае возможного возникновения неисправности одного из ортогональных каналов для расчета модуля вектора виброускорения объекта используют расчетное значение этого неисправного канала и измеренные значения двух остальных исправных ортогональных каналов.
Результаты расчетов сравниваются между собой. При этом возможны следующие варианты.
1. Расчетные значения проекций ортогональных каналов и контрольных равны между собой, т.е.
 ;
;  ;
;  ;
;  ;
;  .
.
В этом случае работоспособность всех ОПВ подтверждается, неисправности каналов отсутствуют.
2. Расчетные значения проекций одного из ортогональных каналов (например, канала Y), полученных с помощью измеренных значений двух контрольных каналов равны между собой (так как при определении расчетного значения неисправного канала не используются измеренные значения самого неисправного канала), но не равны измеренному значению этого канала, при этом расчетные и измеренные значения остальных ортогональных каналов не равны между собой, т.е.
 ;
;
 ;
;
В этом случае принимается решение о наличии неисправности в ортогональном канале, расчетные значения которых, полученные с помощью измеренных значений двух контрольных каналов, равны друг другу (в данном примере неисправный канал Y). Для дальнейшего определения модуля вектора вибоускорения применяют вместо измеренных значений расчетные значения неисправного канала и измеренные значения остальных исправных ортогональных каналов, при этом с четырьмя исправными ОПВ (в варианте с неисправным каналом Y) возможно определение только работоспособности преобразователя пространственной вибрации, а возможность определения следующего (очередного) возможно неисправного канала будет отсутствовать.
3. Расчетные значения каналов, определенные с помощью одного из контрольных каналов (например, контрольного канала K2 по формулам (10)-(13)) равны измеренным значениям, а расчетные значения каналов, определенные с помощью второго контрольного канала (например, контрольного канала K1 по формулам (6)-(9)) отличаются от измеренных значений, т.е.
 ;
;
 .
.
В этом случае принимается решение о наличии неисправности в контрольном канале K1. и его отключении. Проверка работоспособности проводится только с помощью контрольного канала K2, при этом с четырьмя исправными ОПВ (в варианте с неисправным каналом K1) возможно определение только работоспособности преобразователя пространственной вибрации, а возможность определения следующего (очередного) возможно неисправного канала будет отсутствовать.
Если же расчетные значения каналов, определенные с помощью первого контрольного канала (по формулам (6)-(9)) равны измеренным значениям, а расчетные значения каналов, определенные с помощью второго контрольного канала (по формулам (10)-(13) отличаются от измеренных значений, т.е.
 ,
,
 ,
,
то принимается решение о наличии неисправности в контрольном канале K2 и его отключении. Проверка работоспособности проводится только с помощью контрольного канала K1, при этом с четырьмя исправными ОПВ (в варианте с неисправным каналом K2) возможно определение только работоспособности преобразователя пространственной вибрации, а возможность определения следующего (очередного) возможно неисправного канала будет отсутствовать.
Устройство, реализующее способ определения неисправного канала ПППВ с целью повышения эксплуатационной надежности (фиг. 3), работает следующим образом. При первичной поверке в соответствии с рекомендациями ГОСТ Р 8.669-2009 на методы и средства поверки определяются требуемые метрологические характеристики всех каналов ПППВ, в т.ч. и действительные значения коэффициентов преобразования каждого ОПВ, а также фиксируются углы между осями чувствительности ОПВ контрольных каналов K1, K2 и ортогональными осями чувствительности ОПВ каналов X, Y и Z (определяются значения углов β1, β2, γ1, γ2 см. фиг. 4).
После установки на объект в процессе эксплуатации объекта на ПППВ действует вектор виброускорения  , проекции которого aX, aY, aZ,
, проекции которого aX, aY, aZ,  и
и  на оси чувствительности ОПВ 1-5, то с помощью прямого пьезоэффекта на ОПВ 1-5 образуются заряды, пропорциональные воздействующим проекциям вектора виброускорения aX, aY, aZ, и , поступающим на входы соответствующих усилителей заряда 9-13, где преобразуются в пропорциональные значения напряжений, а с выходов усилителей заряда - на узкополосные перестраиваемые фильтры 14-18. Узкополосные перестраиваемые фильтры 14-18 с помощью задатчика частоты 19 выделяют близкий к гармоническому сигналу, как правило, на оборотной частоте ƒоб. Сигналы UX, UY, UZ,
на оси чувствительности ОПВ 1-5, то с помощью прямого пьезоэффекта на ОПВ 1-5 образуются заряды, пропорциональные воздействующим проекциям вектора виброускорения aX, aY, aZ, и , поступающим на входы соответствующих усилителей заряда 9-13, где преобразуются в пропорциональные значения напряжений, а с выходов усилителей заряда - на узкополосные перестраиваемые фильтры 14-18. Узкополосные перестраиваемые фильтры 14-18 с помощью задатчика частоты 19 выделяют близкий к гармоническому сигналу, как правило, на оборотной частоте ƒоб. Сигналы UX, UY, UZ,  и
и  с выходов узкополосных перестраиваемых фильтров 14-18 поступают на блок 24, объединяющий АЦП и вычислительное устройство, и на входы измерителей разности фаз 20-23 между сигналами каналов Z и X - ϕZX, Z и Y - ϕZX, Z и K1 -
с выходов узкополосных перестраиваемых фильтров 14-18 поступают на блок 24, объединяющий АЦП и вычислительное устройство, и на входы измерителей разности фаз 20-23 между сигналами каналов Z и X - ϕZX, Z и Y - ϕZX, Z и K1 -  , Z и K2 -
, Z и K2 -  (как правило, эти разности фаз должны быть близки или к 0° или 180°). В блоке 24 сигналы преобразуются с помощью АЦП в цифровой вид, и дальнейшая обработка информации проводятся в цифровом виде. Вначале в вычислительном устройстве блока 24 определяются по формулам (1)-(5) и фиксируются в заданный момент
(как правило, эти разности фаз должны быть близки или к 0° или 180°). В блоке 24 сигналы преобразуются с помощью АЦП в цифровой вид, и дальнейшая обработка информации проводятся в цифровом виде. Вначале в вычислительном устройстве блока 24 определяются по формулам (1)-(5) и фиксируются в заданный момент
времени значения амплитуд проекций aX, aY, aZ,  и
и  вектора виброускорения
вектора виброускорения  . С помощью проекции вектора виброускорения на оси чувствительности ОПВ контрольных каналов и определяются по формулам (6)-(13) расчетные значения проекций
. С помощью проекции вектора виброускорения на оси чувствительности ОПВ контрольных каналов и определяются по формулам (6)-(13) расчетные значения проекций  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  на оси чувствительности ПППВ X, Y и Z, которые используются для определения семи значений модуля вектора виброускорения:
на оси чувствительности ПППВ X, Y и Z, которые используются для определения семи значений модуля вектора виброускорения:







Рассчитывают среднее арифметическое значение модуля вектора виброускорения:

после чего определяют относительные отклонения рассчитанных значений модулей вектора виброускорения от среднего арифметического значения:







Сравнивают относительные отклонения (22)-(28) с заданным предельным значением:







Если результаты сравнения удовлетворяют требованиям (29)-(35), то вырабатывается положительная команда, направляемая на коммутатор 25 для продолжения работы ПППВ, т.к. работоспособность ПППВ подтверждается. Если результаты сравнения не удовлетворяют требованиям (29)-(35), то вырабатывается отрицательная команда, направляемая на коммутатор 25 для определения неисправного канала, т.к. работоспособность ПППВ не подтверждается.
Определение неисправного канала проводится последовательным сравнением расчетных и измеренных значений проекций ортогональных каналов  ,
,  ,
,  ,
,  ,
,  ,
,  на оси чувствительности ПППВ, при этом
на оси чувствительности ПППВ, при этом  сравнивается с
сравнивается с  и с измеренным значением aX,
и с измеренным значением aX,  сравнивается с
сравнивается с  и с измеренным значением aY,
и с измеренным значением aY,  сравнивается с
сравнивается с  и с измеренным значением aZ.
и с измеренным значением aZ.
Если  , при этом
, при этом  ,
,  , то делается вывод о том, что неисправный ортогональный канал X и вырабатывается команда на использование расчетного значения канала X. Дальнейшее определение модуля вектора виброускорения проводится по формуле (15) или по формуле (18).
, то делается вывод о том, что неисправный ортогональный канал X и вырабатывается команда на использование расчетного значения канала X. Дальнейшее определение модуля вектора виброускорения проводится по формуле (15) или по формуле (18).
Если  , при этом
, при этом  ,
,  , то делается вывод о том, что неисправный ортогональный канал Y и вырабатывается команда на использование расчетного значения канала Y. Дальнейшее определение модуля вектора виброускорения проводится по формуле (16) или по формуле (19).
, то делается вывод о том, что неисправный ортогональный канал Y и вырабатывается команда на использование расчетного значения канала Y. Дальнейшее определение модуля вектора виброускорения проводится по формуле (16) или по формуле (19).
Если  , при этом
, при этом  ,
,  , то делается вывод о том, что неисправный ортогональный канал Z и вырабатывается команда на использование расчетного значения канала Z. Дальнейшее определение модуля вектора виброускорения проводится по формуле (17) или по формуле (20).
, то делается вывод о том, что неисправный ортогональный канал Z и вырабатывается команда на использование расчетного значения канала Z. Дальнейшее определение модуля вектора виброускорения проводится по формуле (17) или по формуле (20).
Если  ,
,  ,
,  ,
,  , но
, но  ,
,  ,
,  ,
,  , то делается вывод о неисправности канала K2 и вырабатывается команда на его отключение. Дальнейшее определение работоспособности ПППВ и модуля вектора виброускорения проводится по формулам (14)-(17), с помощью которых определяется среднее арифметическое значение, относительные отклонения рассчитанных значений модулей вектора виброускорения от среднего арифметического значения по формулам (22)-(25) и сравнение с заданным предельным значением по формулам (29)-(32).
, то делается вывод о неисправности канала K2 и вырабатывается команда на его отключение. Дальнейшее определение работоспособности ПППВ и модуля вектора виброускорения проводится по формулам (14)-(17), с помощью которых определяется среднее арифметическое значение, относительные отклонения рассчитанных значений модулей вектора виброускорения от среднего арифметического значения по формулам (22)-(25) и сравнение с заданным предельным значением по формулам (29)-(32).
Если  ,
,  ,
,  ,
,  , но
, но  ,
,  ,
,  ,
,  , то делается вывод о неисправности канала K1 и вырабатывается команда на его отключение. Дальнейшее определение работоспособности ПППВ и модуля вектора виброускорения проводится по формулам (14), (18)-(20), с помощью которых определяется среднее арифметическое значение, относительные отклонения рассчитанных значений модулей вектора виброускорения от среднего арифметического значения по формулам (22), (26)-(28) и сравнение с заданным предельным значением по формулам (29), (33)-(35).
, то делается вывод о неисправности канала K1 и вырабатывается команда на его отключение. Дальнейшее определение работоспособности ПППВ и модуля вектора виброускорения проводится по формулам (14), (18)-(20), с помощью которых определяется среднее арифметическое значение, относительные отклонения рассчитанных значений модулей вектора виброускорения от среднего арифметического значения по формулам (22), (26)-(28) и сравнение с заданным предельным значением по формулам (29), (33)-(35).
После установки на место эксплуатации в соответствии с интервалом времени проверки работоспособности, установленным регламентированным руководством по эксплуатации, осуществляют проверку работоспособности пьезоэлектрического вибропреобразователя, и, при необходимости, определяют возможный неисправный канал, заменяют измеренное значение неисправного канала на расчетное и, таким образом, восстанавливают работоспособность ПППВ.
В процессе разработки и изготовления экспериментального образца макета корпуса ПППВ с пятью ОПВ выяснилось, что наиболее оптимальной конструкцией с технологической точки зрения является выполнение корпуса, в котором оси чувствительности четвертого и пятого контрольных (дополнительных) однокомпонентных вибропреобразователей в соответствии с первым пунктом формулы предпочтительно размещены в одном октанте (предпочтительно в третьем) ортогональной системы координат и ориентированы под острыми углами (предпочтительно одинаковыми) к вертикальной оси Z. В этом случае реализуется возможность выполнения наиболее компактного ПППВ с пятью ОПВ со стандартным фланцевым креплением на место эксплуатации (три отверстия под крепежные болты расположены под углами 120° друг к другу).
В изготовленном образце макета корпуса ПППВ с пятью ОПВ значения углов между отрицательным направлением оси чувствительности ортогонального канала X и положительными направлениями проекций двух контрольных каналов на плоскость XOY (см. фиг. 4) составили:
β1=18°;
β2=64°,
а между положительным направлением оси чувствительности ортогонального канала Z и положительными направлениями двух контрольных каналов
γ1=45°;
γ2=45°.
В таблице 3 приведены данные, полученные при исследовании пятикомпонентного ВИП математическим моделированием его работы. При моделировании рассмотрены варианты работы ПППВ при отсутствии и при наличии неисправности в ортогональных каналах (X, Y и Z) и контрольных (K1 и K2). Ускорения, действующие на оси чувствительности ОПВ, входящие в состав ПППВ, равны значениям, указанным в колонке 2 таблицы 3; в колонке 3 приведены заданные абсолютные значения отклонений проекций вектора виброускорений от действительных значений в неисправных каналах (при условии наличия неисправности в канале, вызывающего отклонение проекции вектора виброускорения от своего действительного значения 10%); в колонках 4-9 приведены расчетные значения проекций на оси чувствительности ортогональных каналов, определенные по формулам (6)-(13).
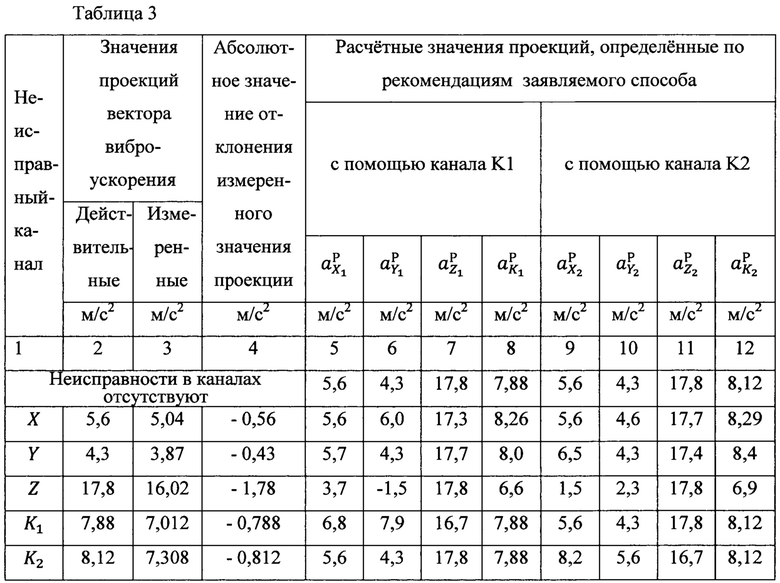
Из таблицы 3 следует, что при отсутствии неисправностей в каналах расчетные значения проекций вектора виброускорения на оси чувствительности ортогональных и контрольных каналов равны между собой (в строке «Неисправности в каналах отсутствуют» расчетные значения проекций вектора виброускорения равны соответствующим действительным значениям, указанным в столбце 2). В столбце 3 указаны измеренные значения проекций вектора виброускорения на оси чувствительности каналов, а в столбце 4 приведено абсолютное отклонение измеренного значения проекции вектора виброускорения от действительного (при наличии введенной неисправности в соответствующий канал).
При наличии введенной неисправности в одном из ортогональных каналов (строки X, Y, и Z) равенство расчетных значений, полученных с помощью контрольных каналов K1 и K2, наблюдается только в неисправном ортогональном канале (столбцы 5 и 9 для неисправного канала X; столбцы 6 и 10 для неисправного канала Y; столбцы 7 и 11 для неисправного канала Z).
При наличии введенного неисправности в одном из контрольных каналов (строки K1 и K2) наблюдается равенство расчетных значений измеренным только в ортогональных каналах, расчетные значения которого получены с помощью исправного контрольного канала, расчетные значения ортогональных каналов, полученные с помощью неисправного контрольного канала не равны измеренным (столбцы 5, 6 и 7 при неисправном контрольном канале K1 и столбцы 9, 10 и 11 при неисправном контрольном канале K2).
В столбцах 8 и 12 приведены расчетные значения проекций вектора виброускорения на оси чувствительности контрольных каналов K1 и K2 соответственно при введенных неисправностей в различные каналы.
Таким образом, видно, что приведенные выше сведения подтверждают возможность осуществления заявляемого технического решения - пьезоэлектрического преобразователя пространственной вибрации и способа повышения его эксплуатационной надежности, достижения указанного технического результата и решения поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ КОНТРОЛЯ ЕГО РАБОТОСПОСОБНОСТИ НА РАБОТАЮЩЕМ ОБЪЕКТЕ | 2015 |
|
RU2602408C1 |
| Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте | 2021 |
|
RU2764504C1 |
| Способ определения работоспособности преобразователя пространственной вибрации на работающем объекте | 2021 |
|
RU2775572C1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2729980C1 |
| СПОСОБ ПОВЕРКИ ТРЕХКОМПОНЕНТНЫХ ВИБРОПРЕОБРАЗОВАТЕЛЕЙ | 2014 |
|
RU2567987C1 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| СПОСОБ МОНИТОРИНГА МАШИН И СООРУЖЕНИЙ | 2008 |
|
RU2371691C1 |
| Комплекс устройств для измерения параметров механических колебаний высокотемпературных объектов | 2018 |
|
RU2705747C1 |
| Комплекс устройств для измерения параметров механических колебаний объектов с компенсацией температурной погрешности | 2023 |
|
RU2813636C1 |
| Комплекс устройств для измерения параметров механических колебаний объектов | 2019 |
|
RU2701207C1 |
Группа изобретений относится к измерительной технике и может быть использована для восстановления эксплуатационной работоспособности пьезоэлектрического преобразователя пространственной вибрации с возможно возникшей неисправностью одного из его измерительных каналов. Устройство содержит корпус с разъемным контактным выводом и элементами крепления к объекту измерения и размещенную в корпусе систему из пяти идентичных однокомпонентных пьезоэлектрических вибропреобразователей, оси чувствительности трех из которых образуют ортогональную систему координат, а двух контрольных вибропреобразователей, оси чувствительности которых проходят через центр ортогональной системы, совмещены со своими плоскостями, проходящими через вертикальную ось чувствительности преобразователя. При этом обе оси чувствительности контрольных вибропреобразователей проходят через третий октант, ориентированы относительно горизонтальных осей чувствительности вибропреобразователей ортогональной системы под известными несовпадающими углами, а относительно вертикальной оси - также под углами известными и предпочтительно одинаковыми и совместно с ортогональной системой образуют шесть некомпланарных и неколлинеарных пространственных косоугольных трехкомпонентных систем координат. Способ предполагает одновременное измерение и запоминание всех значений проекций вектора вибрации объекта, воздействующего на оси чувствительности всех компонент, приведение расчетных значений проекций с использованием контрольных каналов в шести косоугольных системах координат к значениям их проекций в ортогональной системе и по заявляемому алгоритму определяют работоспособность преобразователя пространственной вибрации, устанавливают измерительный канал с возможной неисправностью и по измеренным значениям остальных исправных измерительных каналов восстанавливают эксплуатационную работоспособность преобразователя. Технический результат заключается в возможности восстановления дальнейшей работоспособности преобразователя и продолжении получения достоверной информации об эксплуатационном вибрационном состоянии работающего объекта. 2 н.п. ф-лы, 3 табл., 4 ил. 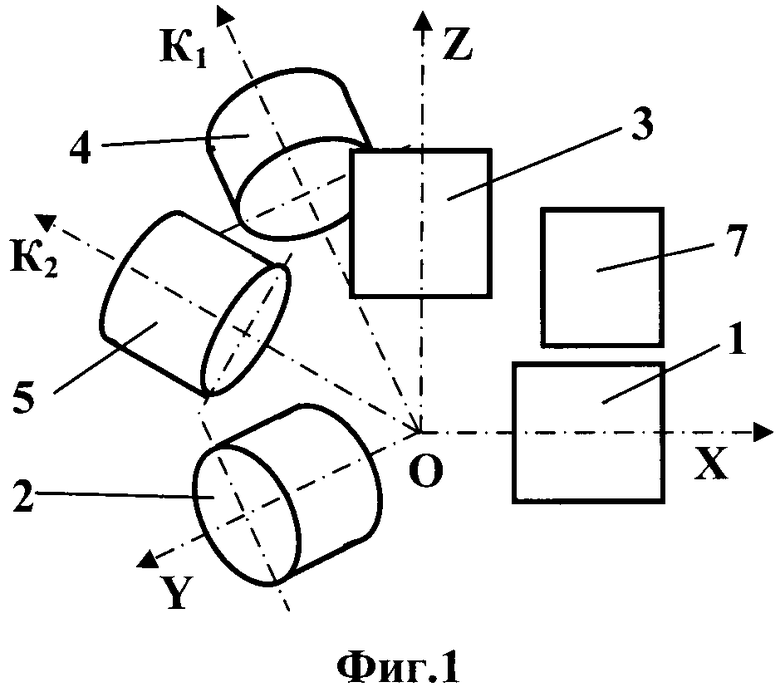
1. Пьезоэлектрический преобразователь пространственной вибрации, включающий корпус с разъемным контактным выводом и элементами крепления к объекту измерения и размещенную в корпусе систему из четырех однокомпонентных пьезоэлектрических вибропреобразователей, оси чувствительности трех из которых образуют ортогональную систему координат, а ось чувствительности четвертого - контрольного, проходящая через центр ортогональной системы координат, совмещена с плоскостью, проходящей через вертикальную ось чувствительности преобразователя, ориентирована под известными углами относительно каждой из осей ортогональной системы и образует с ее вибропреобразователями дополнительные некомпланарные и неколлинеарные пространственные косоугольные трехкомпонентные системы координат, отличающийся тем, что преобразователь снабжен установленным в корпусе дополнительным вторым контрольным идентичным однокомпонентным пьезоэлектрическим вибропреобразователем, ось чувствительности которого также проходит через центр ортогональной системы и совмещена со своей плоскостью, проходящей через вертикальную ось чувствительности преобразователя, при этом обе оси чувствительности контрольных вибропреобразователей проходят через третий октант, ориентированы относительно горизонтальных осей чувствительности вибропреобразователей ортогональной системы под известными несовпадающими углами, а относительно вертикальной оси - также под углами известными и предпочтительно одинаковыми, причем оси чувствительности контрольных вибропреобразователей совместно с ортогональной системой образуют шесть некомпланарных и неколлинеарных пространственных косоугольных трехкомпонентных систем координат.
2. Способ повышения эксплуатационной надежности пьезоэлектрического преобразователя пространственной вибрации, использующий для определения модуля пространственного вектора вибрации объекта одновременное измерение и запоминание всех значений проекций вектора вибрации, воздействующего на оси чувствительности всех компонент, образующих ортогональную и косоугольные пространственные системы координат, приведение расчетных значений проекций с использованием контрольного канала в косоугольных системах координат к значениям их проекций в ортогональной системе и контроль работоспособности преобразователя пространственной вибрации, отличающийся тем, что расчетные значения проекций пространственного вектора вибрации объекта определяют с использованием одной ортогональной системы координат и двух контрольных каналов в шести приведенных косоугольных системах координат, сравнивают полученные приведенные расчетные значения, определенные с помощью двух контрольных каналов, между собой и с соответствующими измеренными значениями ортогональных каналов и по их равенству принимают решение о работоспособности преобразователя, если при сравнении обнаружено равенство между собой только двух приведенных расчетных значений одного из ортогональных каналов, определенных с помощью двух контрольных каналов, при их неравенстве измеренным значениям этого канала и неравенстве приведенных расчетных значений остальных ортогональных каналов соответствующим измеренным значениям, то устанавливают неисправность ортогонального канала, расчетные значения которого, определенные с помощью двух контрольных каналов, равны друг другу, если же при сравнении обнаружено равенство всех приведенных расчетных значений ортогональных каналов, определенных с помощью одного из контрольных каналов, измеренным значениям этих каналов, и соответствующее неравенство расчетных и измеренных значений, определенных с помощью второго контрольного канала, то устанавливают неисправность второго контрольного канала, отключение которого сохраняет эксплуатационную работоспособность пьезоэлектрического преобразователя, в случае установления возможной неисправности ортогонального канала при определении модуля пространственного вектора вибрации объекта для сохранения эксплуатационной работоспособности пьезоэлектрического преобразователя измеренное значение проекции вектора на ось чувствительности неисправного ортогонального канала меняют на его расчетное значение, определенное по измеренным значениям одного контрольного и остальных исправных ортогональных каналов.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ КОНТРОЛЯ ЕГО РАБОТОСПОСОБНОСТИ НА РАБОТАЮЩЕМ ОБЪЕКТЕ | 2015 |
|
RU2602408C1 |
| СПОСОБ ПОВЕРКИ ТРЕХКОМПОНЕНТНЫХ ВИБРОПРЕОБРАЗОВАТЕЛЕЙ | 2014 |
|
RU2567987C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2050713C1 |
| US 7066004 B1 27.06.2006 | |||
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2308068C2 |

