Способ относится к измерительной технике и может быть использован для контроля работоспособности средств измерения параметров вектора пространственной вибрации объекта непосредственно во время его эксплуатации.
Как правило, для измерения параметров вектора пространственной вибрации (модуля вектора, его направления в системе координат, связанной с объектом, фазы) в жестких условиях эксплуатации (широкие динамический и частотный диапазоны, высокие и низкие температуры, влажность и т.д.) применяются пьезоэлектрические вибропреобразователи, которые обладают рядом преимуществ перед вибропреобразователями, основанными на других физических принципах (индукционными, вихретоковыми, емкостными и т.д. [см., например, «Вибрации в технике: Справочник в 6-ти т./ред. совет В.Н. Челомей (пред.).- М.: Машиностроение, 1981. - т. 5. Измерения и испытания. - под. ред. М.Д. Генкина. -1981 - с 220-226]. По этой причине ниже, в качестве примеров, рассматриваются только пьезоэлектрические преобразователи пространственной вибрации, измеряющие виброускорение, однако все теоретические и практические выводы могут быть распространены как на преобразователи виброскорости и виброперемещения, так и на преобразователи вибрации, основанные на других физических принципах.
В процессе эксплуатации на пьезоэлектрические преобразователи параметров вектора пространственной вибрации (далее - преобразователи пространственной вибрации) действуют различные влияющие факторы как внешнего (температурные, электрические, магнитные поля, ударные нагрузки и т.д.) так и внутреннего характера (старение пьезокерамики, ослабление винтовых соединений, нарушение электрических контактов в чувствительном элементе вибропреобразователя и в соединительных кабелях и т.д.). Все это может привести к тому, что в процессе эксплуатации коэффициенты преобразования одного или нескольких чувствительных элементов преобразователя пространственной вибрации изменятся настолько, что выйдут за пределы, допускаемые условиями эксплуатации. Соответственно информация о параметрах действующей на него пространственной вибрации будет недостоверной. Оператор на основании полученных результатов измерений может принять решение, неадекватное возникшим обстоятельствам. Поэтому контроль исправности преобразователей пространственной вибрации, ответственных за безопасность работающих, особенно летающих, объектов является важной технико-экономической задачей.
Известен способ дистанционного тестирования блока акселерометров - «Способ дистанционного тестирования блока акселерометров в составе измерительного преобразователя и устройство для его осуществления», RU 2271015, G01P 21/00, 27.02.2006, в составе измерительного преобразователя вектора ускорения, в котором периодически тестируют блок акселерометров в месте установки преобразователя, для чего сначала исключают жесткую сцепку блока акселерометров с корпусом преобразователя, затем возбуждают в блоке акселерометров механические колебания, после чего посредством этих акселерометров измеряют уровень вызванных механических колебаний, а результат измерений сравнивают с известными номинальными значениями и определяют работоспособность и погрешность акселерометров, входящих в измерительный блок.
Известен способ проверки пьезоэлектрического датчика вибрации «Piezoelectric vibration sensor (Пьезоэлектрический датчик вибрации)» - CN 105277617 G01H 11/08, G01N 29/04. Для определения его работоспособности в качестве возбуждающего пьезоэлектрический чувствительный элемент датчика используется стальной молоток, имеющий источник возбуждающей энергии и схему управления. Отклик измерительной пьезоэлектрической системы на нормированное воздействие стального молотка анализируется и информация об отказах, таких как износ и разрушение детектируемой части пьезоэлектрического датчика могут быть определены в режиме реального времени.
К причинам, препятствующим применение известных способов для определения работоспособности пьезоэлектрического преобразователя пространственной вибрации, является усложнение конструкции, в которой должны быть введены дополнительные элементы (устройство возбуждения механических или импульсных (с помощью стального молотка) колебаний), при этом, конструкция дополнительных элементов, как правило, зависит от конструкции объекта, на котором устанавливаются средства измерений, т.е. к каждому типу объектов нужно разрабатывать специальные дополнительные элементы.
Известен способ бездемонтажного определения работоспособности однокомпонентного пьезоэлектрического вибропреобразователя на неработающем объекте - «Способ бездемонтажной поверки пьезоэлектрического вибропреобразователя на месте эксплуатации», RU 2524743, G01H 11/08, 10.08.2014, использующий возбуждение принудительных механических колебаний в пьезопакете исследуемого однокомпонентного пьезоэлектрического вибропреобразователя путем подачи на его электроды электрического гармонического сигнала переменной частоты.
Известен способ определения работоспособности пьезоэлектрического вибропреобразователя на объекте - «Full function test for in situ test of sensors and amplifiers (Полномасштабное испытание для в находящихся в эксплуатации датчиков и усилителей)», DK 2300790 (US 2009284263), G01P 15/09, G01P 21/00, G01H 3/00, G01R 31/28, 2014-10-13, в соответствии с которым испытания могут быть выполнены из удаленного центрального места без дополнительной проводки, а датчик находится в рабочей среде. Тестирование выполняется наложением тестовых и управляющих сигналов на выходной сигнал преобразователя. Тестовая сигнализация посредством дополнительной электронной схемы в преобразователе преобразуется и направляется на вход предварительного усилителя согласования, где отклики, генерируемые тестовыми сигналами, могут анализироваться из системы удаленного анализа для квалифицированного определения работоспособности преобразователя.
К причинам невозможности применения известных способов для определения работоспособности многокомпонентного (не менее трех компонент) пьезоэлектрического преобразователя пространственной вибрации относится то, что при электрическом возбуждении одной компоненты преобразователя пространственной вибрации при бездемонтажной поверке на неработающем объекте возникает взаимное влияние электрического возбуждения на все компоненты из-за их расположения в одном корпусе и происходит соответствующее искажение результатов измерений, не позволяющее правильно оценить работоспособное состояние даже проверяемой компоненты многокомпонентного преобразователя пространственной вибрации.
Известно также «Устройство резервирования акселерометров в системе управления летательного аппарата» (RU 2308068, G05D 1/00, Н05К 10/00, 27.05.2005), предназначенное для решения другой задачи - управления движением центра масс летательного аппарата за счет получения достоверной информации о величине и направлении линейного кажущегося ускорения или кажущейся скорости.
Для этого вычислитель кажущегося ускорения известного устройства всегда должен получать информацию как минимум с трех любых из четырех пространственно разнесенных акселерометров с однокомпонентными низкочастотными преобразователями ускорения, векторы осей чувствительности которых некомпланарны и неколлинеарны. Три из четырех преобразователей ускорения образуют ортогональную систему координат, а ось чувствительности четвертого - резервного преобразователя ускорения составляет с каждым из трех одинаковый угол.
Известное техническое решение предназначено для поддержания работоспособности устройства в случае выхода из строя одного из трех ортогональных компонентов за счет его функциональной замены резервным преобразователем ускорения.
В отличие от заявляемого способа контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте, известное устройство предназначено для решения другой задачи -резервирования акселерометров в системе управления летательного аппарата и, несмотря на сходную ориентацию преобразователей ускорения, по своему назначению, сущности и достигаемому результату не может быть признано аналогом заявляемого способа.
Известен способ контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте -«Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте», RU 2602408, G01P 15/09, 10.11.2016, который принят за прототип заявляемого способа.
Для контроля работоспособности известным способом в корпусе пьезоэлектрического преобразователя пространственной вибрации кроме трех ортогонально расположенных пьезоэлектрических однокомпонентных преобразователей (каналов) размещают дополнительно четвертый канал (контрольный), ось чувствительности которого располагают под известными углами к осям чувствительности ортогонально расположенных каналов; определяют значения проекций вектора пространственной вибрации объекта в ортогональной и косоугольных системах координат, последние приводят к ортогональной системе координат. Затем определяют модули вектора вибрации, их суммируют и определяют среднее арифметическое значение. Вычисляют отклонение вибрации от среднего арифметического значения, сравнивают эти отклонения с предварительно заданным предельным отклонением и определяют работоспособность преобразователя. Здесь и далее в минимальный состав каждого канала преобразователя пространственной вибрации включают чувствительный элемент (в пьезоэлектрическом преобразователе - пьезоэлемент) и согласующий усилитель (в пьезоэлектрическом преобразователе -усилитель заряда), на выходе каждого канала получают электрическое напряжение.
К недостаткам известного способа следует отнести его слабую чувствительность к определению неисправности тех каналов, проекции вектора пространственной вибрации на оси чувствительности которых существенно меньше проекций на оси чувствительности остальных каналов (не менее, чем на порядок). В этом случае работоспособность преобразователя пространственной вибрации будет подтверждаться даже в тех случаях, когда будет неисправным канал (или каналы), проекция вектора на ось чувствительности которого будет существенно меньше проекций на оси чувствительности остальных каналов. Как результат при последующих измерениях (когда проекция вектора на ось чувствительности может уже не быть существенно меньше проекций на оси чувствительности остальных каналов) преобразователь пространственной вибрации может выдавать неправильную информацию о модуле вектора пространственной вибрации до следующей проверки его работоспособности.
Такое положение связано с тем, что модуль вектора пространственной вибрации определяется квадратичным суммированием его ортогональных проекций под корнем квадратным, а из математики известно [см., например, А.А. Рыбкин, А.З. Рыбкин, Л.С. Хренов «Справочник по математике». М., Высшая школа, 1970 - с 354-356], что при квадратичном суммировании пренебрежение слагаемым (или слагаемыми), которое не менее, чем на порядок меньше максимального слагаемого (или суммы квадратов максимальных слагаемых), приводит к появлению погрешности не более, чем на 0,5%. Это получают следующим образом. При пренебрежимо малых значениях (далее - малые значения) одной ортогональной проекции по сравнению с остальными проекциями, например, проекции  модуль вектора пространственной вибрации определяется выражением:
модуль вектора пространственной вибрации определяется выражением:

где  - проекции вектора пространственной вибрации на оси декартовой системы координат X, 7 и Z, соответственно.
- проекции вектора пространственной вибрации на оси декартовой системы координат X, 7 и Z, соответственно.
Если пренебречь проекцией  то относительную погрешность определения модуля вектора можно получить в виде, %:
то относительную погрешность определения модуля вектора можно получить в виде, %:

Задачей, на решение которой направлен заявляемый способ, является обеспечение возможности контроля работоспособности каналов преобразователя пространственной вибрации непосредственно на работающем объекте при любых соотношениях проекций вектора пространственной вибрации на оси чувствительности отдельных каналов.
Технический результат, получаемый при осуществлении заявляемого способа, заключается в обеспечении возможности получения объективной информации о состоянии работоспособности измерительного преобразователя вектора пространственной вибрации в случае получения недостоверной информации о вибрационных параметрах работающего объекта при любом соотношении проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя пространственной вибрации.
Указанный технический результат достигается тем, что в заявляемом способе определения работоспособности преобразователя пространственной вибрации на работающем объекте одновременно измеряют и запоминают все значения проекций пространственного вектора вибрации, воздействующего на преобразователь вектора пространственной вибрации объекта, - в одной ортогональной и трех косоугольных пространственных системах координат, приводят значения проекций пространственного вектора вибрации объекта в трех косоугольных системах координат к значениям их проекций в ортогональной системе и определяют четыре значения модуля вектора вибрации в каждой из пространственных систем координат, среднее арифметическое значение, отклонения каждого из четырех значений модуля вектора пространственной вибрации от среднего арифметического значения, сравнивают с заданным предельным отклонением и по результатам этих сравнений предварительно определяют работоспособность исследуемого преобразователя пространственной вибрации на работающем объекте, при этом, дополнительно определяют абсолютные значения относительных разностей между средним арифметическим значением и измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя, сравнивают с заданным первым дополнительным предельным значением относительных разностей, по результатам сравнения определяют ортогональные проекции вектора пространственной вибрации с малыми значениями, определяют абсолютные значения относительных отклонений расчетных значений ортогональных проекций от своих измеренных значений, сравнивают эти отклонения с заданным вторым дополнительным предельным значением отклонений, определяют исправность ортогональных каналов с малыми значениями проекций, и делают окончательный вывод о работоспособности всех каналов преобразователя пространственной вибрации.
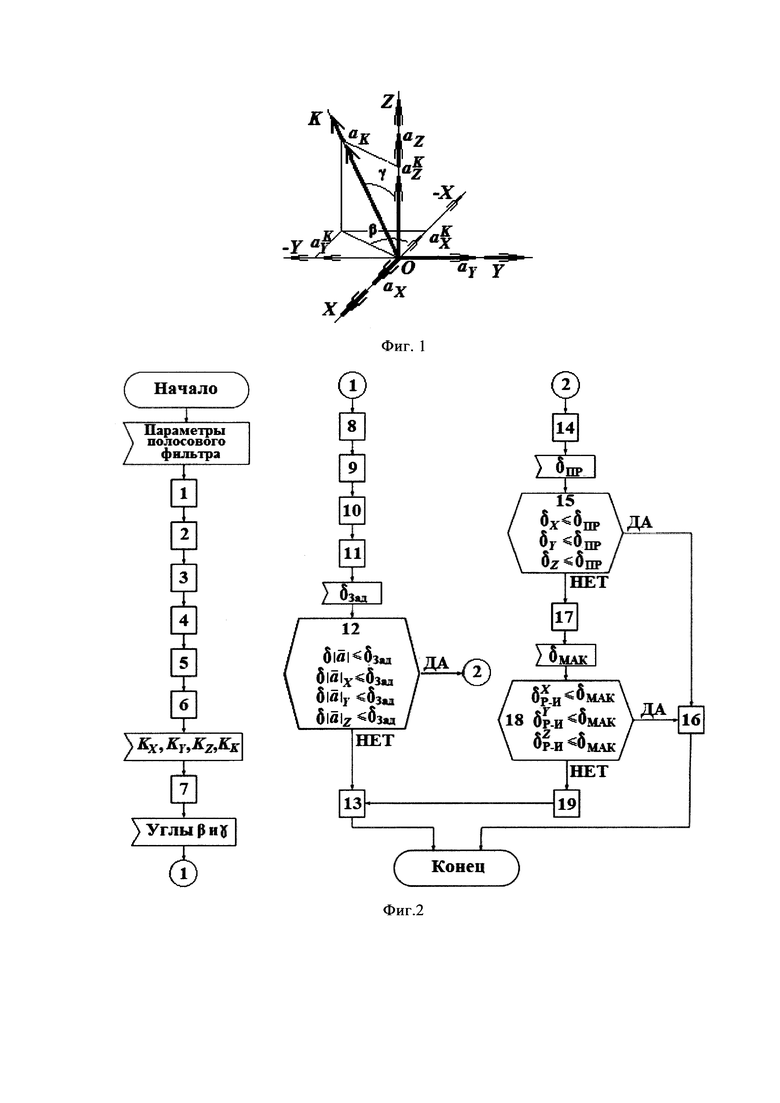
На фиг. 1 представлено пространственное расположение осей чувствительности отдельных каналов преобразователя пространственной вибрации. На фиг. 2 представлен алгоритм преобразования информации при реализации заявляемого способа.
На фиг. 1
OXYZ - декартова (прямоугольная) система координат;
OXYK, OXZK. OYZK - косоугольные системы координат;
 - ортогональные проекции вектора пространственной вибрации в декартовой системе координат;
- ортогональные проекции вектора пространственной вибрации в декартовой системе координат;
 - проекция вектора пространственной вибрации на ось чувствительности контрольного канала K;
- проекция вектора пространственной вибрации на ось чувствительности контрольного канала K;
 - проекции вектора
- проекции вектора  на ортогональные оси чувствительности каналов X.Y.Z;
на ортогональные оси чувствительности каналов X.Y.Z;
β - угол между отрицательным направлением ортогональной координаты X и проекцией вектора контрольного канала K на плоскость OXY;
γ - угол между вектором контрольного канала K и положительным направлением ортогональной координаты Z.
Заявляемый способ определения работоспособности преобразователя пространственной вибрации на работающем объекте основан на следующих положениях (фиг. 2).
Преобразователь пространственной вибрации устанавливают на объекте, подключают его каналы в соответствии с инструкцией по эксплуатации к источникам питания и аналого-цифровому преобразователю, а последний - к персональному компьютеру с установленной программой обработки информации. После включения компьютера в него вводят следующие параметры полосового фильтра:
- рабочую полосу частот;
- значение оборотной частоты работающего объекта;
- шаг по частоте при определении спектрального состава и направления действующего на преобразователь вектора пространственной вибрации в зависимости от частоты.
На преобразователь пространственной вибрации воздействуют вибрацией работающего объекта и на выходах каналов получают сигналы UX,UY,UZ,UK, пропорциональные проекциям вектора пространственной вибрации на оси чувствительности каналов X, Y, Z и K соответственно (блок 1, фиг. 2).
Преобразуют в цифровую форму с помощью аналого-цифрового преобразователя выходные сигналы Ux,Uy,Uz,Uk каналов X, Y, Z и K, соответственно, (блок 2, фиг. 2). Направляют выходные сигналы каналов UX,UY,UZ,UK в персональный компьютер (блок 3, фиг. 2).
Определяют спектры выходных сигналов каналов преобразователя пространственной вибрации X,Y,Z и K, соответственно (блок 4, фиг. 2), и направление вектора пространственной вибрации, то есть углы  между проекциями вектора пространственной вибрации на ось чувствительности канала Z и на оси чувствительности каналов X, Y и К, соответственно, в зависимости от частоты (блок 5, фиг. 2).
между проекциями вектора пространственной вибрации на ось чувствительности канала Z и на оси чувствительности каналов X, Y и К, соответственно, в зависимости от частоты (блок 5, фиг. 2).
Фильтруют выходные сигналы преобразователя пространственной вибрации с целью выделения оборотной частоты работающего объекта (блок 6, фиг. 2), и измеряют на оборотной частоте значения выходных сигналов каналов преобразователя пространственной вибрации 
Вводят в персональный компьютер коэффициенты преобразования каналов, определенные при поверке (первичной или периодической) и рассчитывают измеренные значения проекций вектора пространственной вибрации на оси чувствительности каналов преобразователя пространственной вибрации на оборотой частоте работающего объекта (блок 7, фиг. 2):

где  - измеренные на оборотной частоте значения проекций вектора пространственной вибрации на оси чувствительности каналов преобразователя пространственной вибрации X, Y, Z и K, соответственно;
- измеренные на оборотной частоте значения проекций вектора пространственной вибрации на оси чувствительности каналов преобразователя пространственной вибрации X, Y, Z и K, соответственно;
kX, kY, kZ и kK - коэффициенты преобразования каналов преобразователя пространственной вибрации X, Y, Z и К, соответственно, на оборотной частоте;
 - углы между проекциями вектора пространственной вибрации на ось чувствительности канала Z и на оси чувствительности каналов X, Y и K, соответственно.
- углы между проекциями вектора пространственной вибрации на ось чувствительности канала Z и на оси чувствительности каналов X, Y и K, соответственно.
Вводят в персональный компьютер значения углов β и γ, фиксирующие положение оси чувствительности контрольного канала преобразователя пространственной вибрации относительно направления осей чувствительности ортогональных каналов, и определяют расчетные значения проекций вектора пространственной вибрации на ортогональные оси чувствительности каналов преобразователя пространственной вибрации X, Y, Z на оборотной частоте (блок 8, фиг. 2):
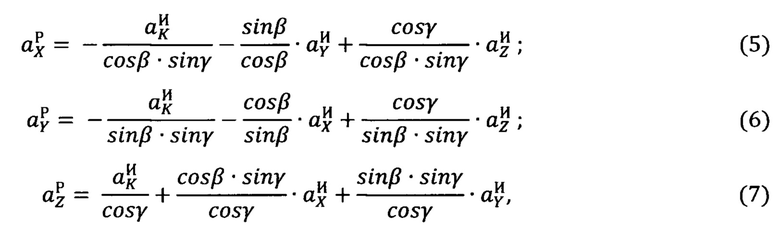
где  - расчетные значения проекций вектора пространственной вибрации на ортогональные оси чувствительности каналов преобразователя пространственной вибрации X, Y, Z на оборотной частоте.
- расчетные значения проекций вектора пространственной вибрации на ортогональные оси чувствительности каналов преобразователя пространственной вибрации X, Y, Z на оборотной частоте.
Определяют четыре расчетных значения модуля вектора пространственной вибрации (измеренное (действительное) значение и значения модуля с расчетными значениями проекций, определенными по формулам (5) - (7), блок 9, фиг. 2):
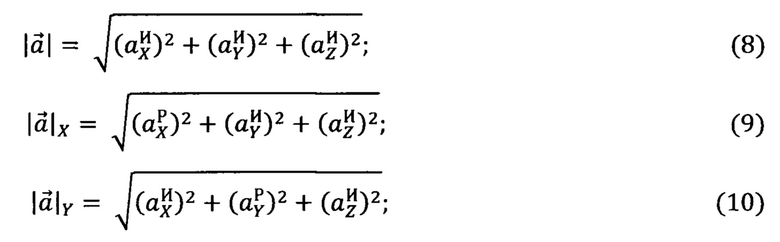

где  - измеренное и расчетные значения модуля вектора пространственной вибрации.
- измеренное и расчетные значения модуля вектора пространственной вибрации.
Определяют среднее арифметическое значение модуля вектора пространственной вибрации (блок 10, фиг. 2):

где  - среднее арифметическое значение модуля вектора пространственной вибрации.
- среднее арифметическое значение модуля вектора пространственной вибрации.
Определяют абсолютные значения относительных отклонений измеренного и расчетных значений модуля вектора пространственной вибрации от его среднего арифметического значения (блок 11, фиг. 2):
где  - абсолютные значения относительных отклонений измеренного и расчетных значений модуля вектора пространственной вибрации от его среднего арифметического значения.
- абсолютные значения относительных отклонений измеренного и расчетных значений модуля вектора пространственной вибрации от его среднего арифметического значения.
Вводят в персональный компьютер предельное (максимально допускаемое) отклонение δзад значений модуля вектора пространственной вибрации от его среднего арифметического значения и сравнивают с ним относительные отклонения четырех значений модуля вектора пространственной вибрации (блок 12, фиг. 2):

По результатам сравнения предварительно определяют работоспособное состояние преобразователя пространственной вибрации: если не выполняется хотя бы одно из условий (17) - (20), то работоспособность преобразователя пространственной вибрации не подтверждают (блок 13, фиг. 2). Если условия (17) - (20) выполняются, то дополнительно определяют абсолютные значения относительных разностей  между измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя X, Y, и Z, соответственно, и средним арифметическим значением (блок 14, фиг. 2), %:
между измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя X, Y, и Z, соответственно, и средним арифметическим значением (блок 14, фиг. 2), %:
где  - абсолютные значения относительных разностей между измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя X, Y, и Z, соответственно, и средним арифметическим значением.
- абсолютные значения относительных разностей между измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя X, Y, и Z, соответственно, и средним арифметическим значением.
Вводят в персональный компьютер первое дополнительное предельное (минимально допускаемое) значение δПР относительных разностей между измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя и средним арифметическим значением и сравнивают с ним полученные абсолютные значения относительных разностей (блок 15, фиг. 2). Если условия

выполняются, то значения проекций не считают пренебрежимо малыми и, при выполнении условий (17) - (20), работоспособность преобразователя пространственной вибрации подтверждают (блок 16, фиг. 2), и устанавливают, что неисправности в каналах преобразователя пространственной вибрации отсутствуют. Если не выполняются условия (24) - (26) (одно или два), то считают малыми значения проекций вектора пространственной вибрации на оси чувствительностей ортогональных каналов с невыполненными условиями, и определяют абсолютные значения относительных разностей расчетных и измеренных абсолютных значений проекций этих каналов (блок 17, фиг. 2), %:
где  - абсолютные значения относительных разностей расчетных и измеренных абсолютных значений проекций ортогональных каналов.
- абсолютные значения относительных разностей расчетных и измеренных абсолютных значений проекций ортогональных каналов.
Вводят в персональный компьютер второе дополнительное предельное (максимально допускаемое) значение δМАК отклонений расчетных значений модуля
вектора пространственной вибрации от измеренных и сравнивают с ним полученные абсолютные значения относительных разностей (блок 18, фиг. 2).

Если условия (30) - (32) выполняются, то неисправности во всех каналах преобразователя пространственной вибрации отсутствуют, и работоспособность преобразователя пространственной вибрации подтверждают (блок 16, фиг. 2), включая работоспособность каналов с малыми значениями проекций. Если не выполняется хотя бы одно из условий (30) - (32), то работоспособность каналов с малыми значениями проекций не подтверждают (блок 19, фиг. 2), соответственно, не подтверждают работоспособность преобразователя пространственной вибрации в целом (блок 13, фиг. 2).
Проверка способа определения работоспособности преобразователя пространственной вибрации проводилась с помощью математического моделирования ситуации, при которой измерение модуля вектора пространственной вибрации проводилось четырехкомпонентным преобразователем пространственной вибрации с исправными ортогональными и контрольным каналами, и ситуацией, в которой вводились неисправности в каналы.
Расчеты проведены при следующих исходных данных и метрологических характеристиках каналов преобразователя пространственной вибрации:
коэффициенты преобразования каналов X,Y,ZnK пьезоэлектрического преобразователя пространственной вибрации kX=4,9 мВ/мс-2, kY=5,15 мВ/мс-2, kZ=4,88 мВ/мс-2, kK=5,1 мВ/мс-2;
- углы β=30 угл. град.; γ=45 угл. град.;
- предельное (максимально допускаемое) значение отклонений δзад=2%;
- первое дополнительное предельное (минимально допускаемое) значение относительных разностей δ:ПР=90%;
- второе дополнительное предельное (максимально допускаемое) значение отклонений измеренных значений модуля вектора пространственной вибрации от расчетных δМАК=5%;
- напряжения на выходах каналов при отсутствии неисправностей (рассмотрены два варианта):
вариант 1: Ux=7,35 мВ, UY=61,8 мВ, Uz=97,6 мВ, UK=89,08 мВ, (в данном варианте у одного ортогонального канала (канал X) проекция вектора пространственной вибрации на ось чувствительности существенно меньше двух остальных ортогональных проекций);
вариант 2: напряжения на выходах каналов при отсутствии неисправностей: Ux=7,35 мВ, UY=7,725 мВ, Uz=97,6 мВ, UK=70,15 мВ, (в данном варианте у двух ортогональных каналов (каналы X и Y) проекции вектора пространственной вибрации на их оси чувствительности существенно меньше третьей ортогональной проекции).
При моделировании не рассматриваются операции, перечисленные в блоках 1 - 6 алгоритма (фиг. 2), т.к. они являются предварительными операциями и непосредственно не относятся к вопросам определения работоспособности преобразователя пространственной вибрации. Результаты расчетов, полученных в последующих после блоков 1-6 операциях, сведены в таблицы 1 - 9.
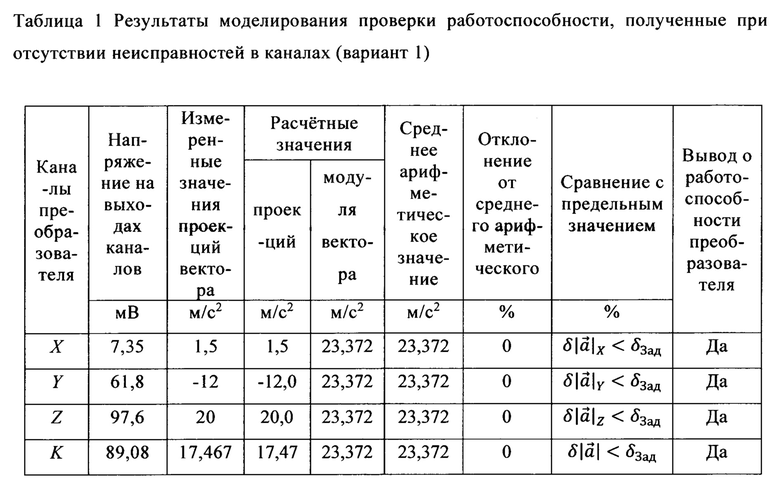
В последней графе каждой таблицы 1 - 9 приведены выводы или о работоспособности исследуемого преобразователя пространственной вибрации или о наличии малых значений ортогональных проекций вектора пространственной вибрации, при этом, термин «Да» подтверждает работоспособность исследуемого преобразователя пространственной вибрации или наличие ортогональных проекций с малыми значениями, термин «Нет» не подтверждает работоспособность исследуемого преобразователя пространственной вибрации или наличие ортогональных проекций с малыми значениями.
В таблицах (1-6) в качестве примера применено одно значение ортогональной проекции вектора пространственной вибрации (значение канала X), которое было существенно меньше двух других ортогональных проекций (вариант 1).
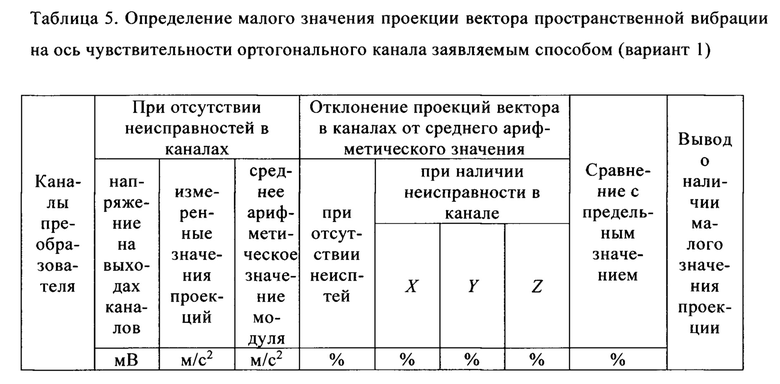
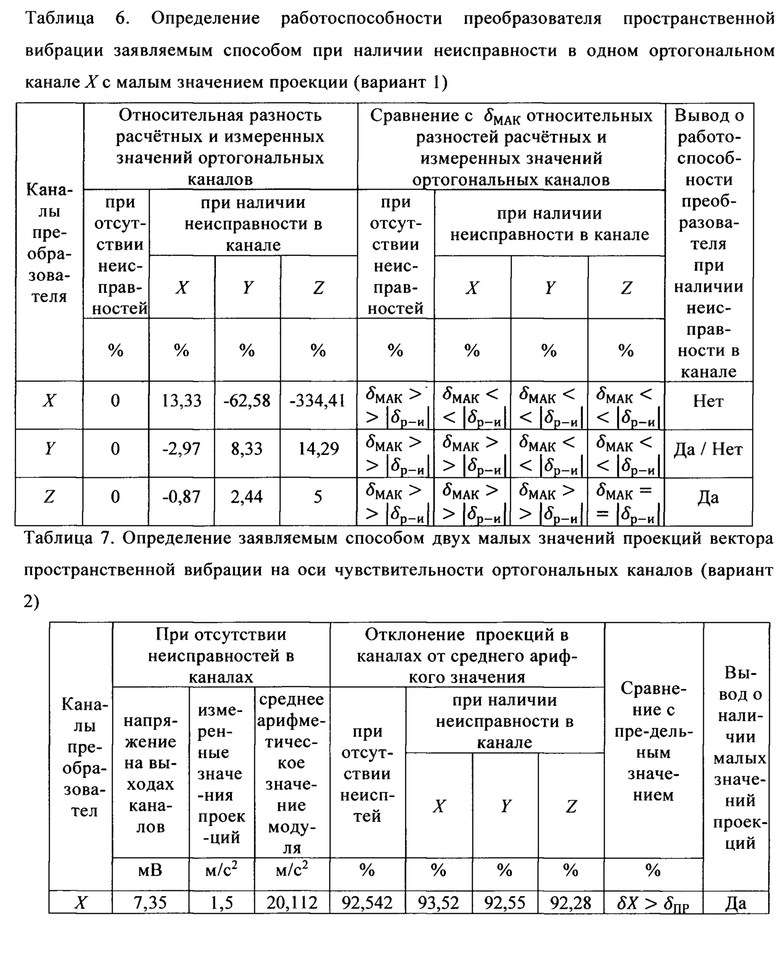
В таблицах (7-9) в качестве примера рассмотрен вариант влияния на работоспособность преобразователя пространственной вибрации двух ортогональных каналов с малыми значениями проекций вектора пространственной вибрации (значения проекций каналов X и Y существенно меньше значения третьей ортогональной проекции канала Z).
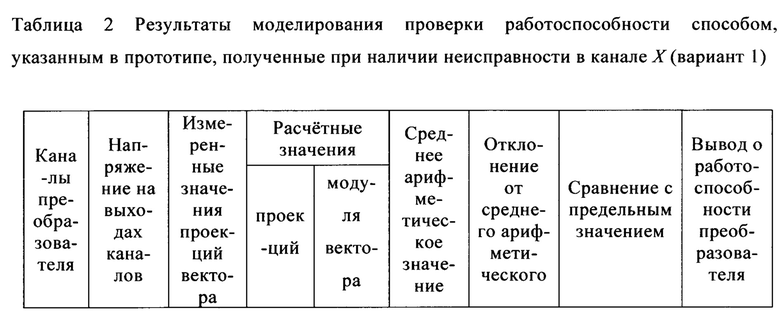
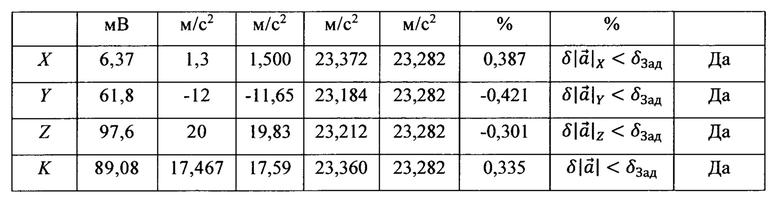
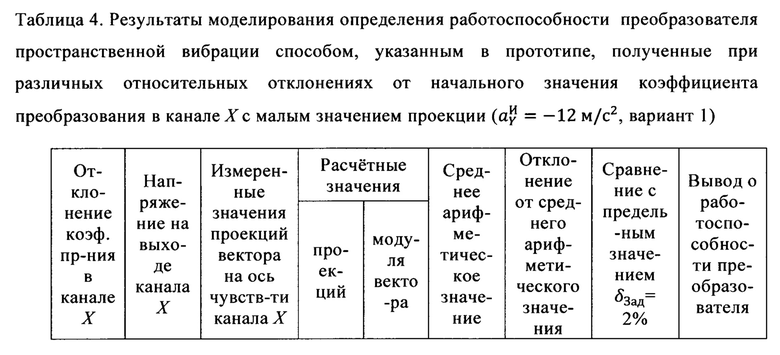
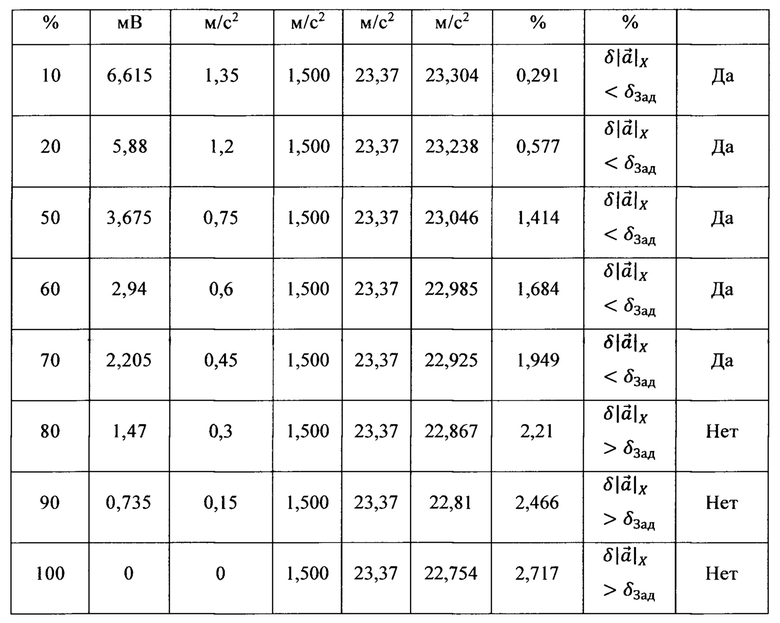
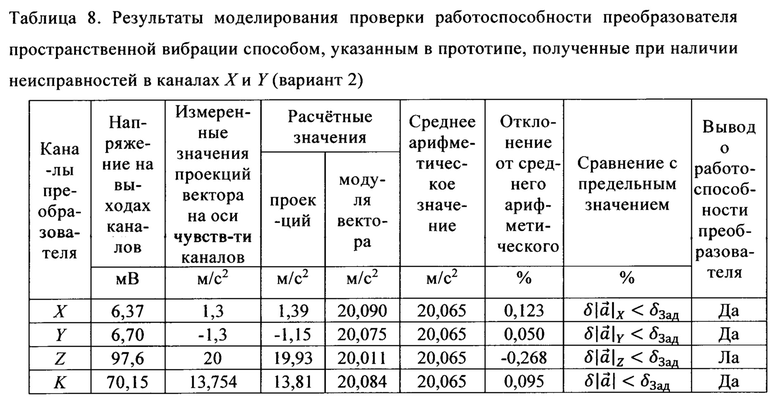
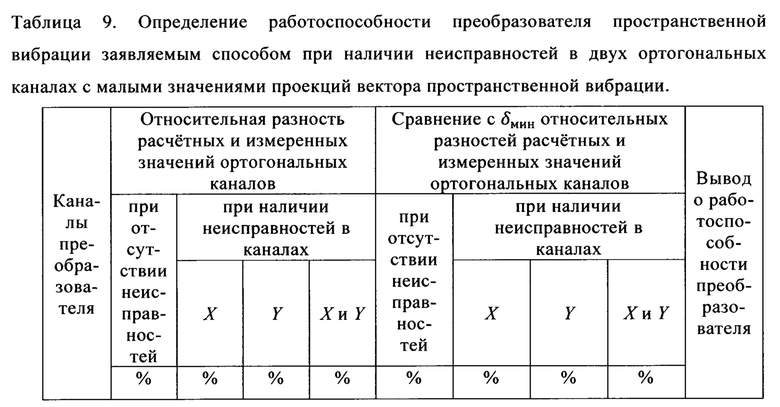
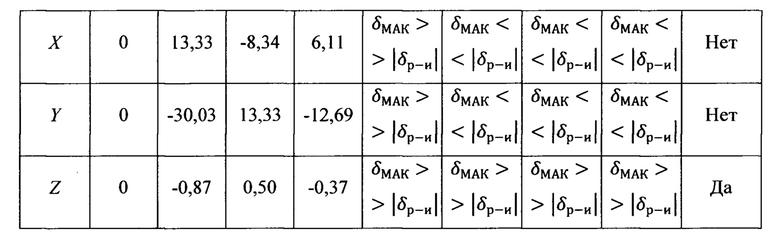
В таблице 1 приведены результаты, полученные при моделировании проверки работоспособности преобразователя пространственной вибрации с полностью исправными каналами преобразователя; в таблице 2-е неисправным каналом X (измеренное значение проекции изменено на -13,3%); в таблице 3-е неисправным каналом Z (измеренное значение проекции изменено на -5,0%); в таблице 4 -моделирование определения работоспособности преобразователя пространственной вибрации способом, указанным в прототипе, полученное при различных относительных отклонениях от начального значения коэффициента преобразования в канале X с малым значением проекции при  (вариант 1); в таблице 5 - моделирование определения малого значения проекции вектора пространственной вибрации на ось чувствительности ортогонального канала (вариант 1); в таблице 6 - моделирование определения работоспособности преобразователя пространственной вибрации при наличии неисправности в одном ортогональном канале X с малым значением проекции вектора пространственной вибрации на ось его чувствительности (вариант 1); в таблице 7 - моделирование определения малых значений проекций вектора пространственной вибрации на оси чувствительности двух ортогональных каналов (вариант 2); в таблице 8 моделирование проверки работоспособности преобразователя пространственной вибрации способом, указанным в прототипе, полученные при наличии неисправностей в каналах X и Y (вариант 2); в таблице 9 - моделирование проверки работоспособности преобразователя пространственной вибрации заявляемым способом, полученные при наличии неисправностей в двух ортогональных каналах с малыми значениями проекций вектора пространственной вибрации (вариант 2)
(вариант 1); в таблице 5 - моделирование определения малого значения проекции вектора пространственной вибрации на ось чувствительности ортогонального канала (вариант 1); в таблице 6 - моделирование определения работоспособности преобразователя пространственной вибрации при наличии неисправности в одном ортогональном канале X с малым значением проекции вектора пространственной вибрации на ось его чувствительности (вариант 1); в таблице 7 - моделирование определения малых значений проекций вектора пространственной вибрации на оси чувствительности двух ортогональных каналов (вариант 2); в таблице 8 моделирование проверки работоспособности преобразователя пространственной вибрации способом, указанным в прототипе, полученные при наличии неисправностей в каналах X и Y (вариант 2); в таблице 9 - моделирование проверки работоспособности преобразователя пространственной вибрации заявляемым способом, полученные при наличии неисправностей в двух ортогональных каналах с малыми значениями проекций вектора пространственной вибрации (вариант 2)


На основании результатов математического моделирования определения работоспособности преобразователя пространственной вибрации можно сделать следующие выводы:
- при отсутствии неисправностей в каналах преобразователя пространственной вибрации условия (17) - (20) выполняются, а работоспособность преобразователя подтверждается (таблица 1);
- минимальное влияние на результат определения работоспособности оказывают малые значения проекций вектора пространственной вибрации на оси чувствительности ортогональных каналов (например, способом, указанным в прототипе, работоспособность преобразователя пространственной вибрации подтверждается даже при наличии неисправностей в ортогональных каналах X (таблицы 2 и 4 до значения  т.е. изменение коэффициента преобразования ортогонального канала X на 70%, однако по сложившейся практике в области виброизмерений признается, что отклонение коэффициента преобразования канала более, чем на 5% указывает на его несоответствие Техническим условиям [см., например, ТЗ на составную часть ОКР «Разработка вибропреобразователя пьезоэлектрического трехкомпонентного со встроенным усилителем заряда MB - 52М для бортовой системы диагностики БСДВ - 28», ФГУП «ЦИАМ им. П.И. Баранова», 2019 - с 7-9]) или X и Y (таблица 8);
т.е. изменение коэффициента преобразования ортогонального канала X на 70%, однако по сложившейся практике в области виброизмерений признается, что отклонение коэффициента преобразования канала более, чем на 5% указывает на его несоответствие Техническим условиям [см., например, ТЗ на составную часть ОКР «Разработка вибропреобразователя пьезоэлектрического трехкомпонентного со встроенным усилителем заряда MB - 52М для бортовой системы диагностики БСДВ - 28», ФГУП «ЦИАМ им. П.И. Баранова», 2019 - с 7-9]) или X и Y (таблица 8);
- максимальное влияние на результаты определения работоспособности преобразователя пространственной вибрации оказывает проекция вектора с максимальным значением (таблица 3, расчеты показывают, что при отклонении коэффициента преобразования канала Z более, чем на 3,7% при δзад=2% работоспособность преобразователя пространственной вибрации уже не будет подтверждена, а при тех же условиях к аналогичному результату приводит отклонение коэффициента преобразования канала Г на 15%);
- заявляемый способ определения работоспособности преобразователя пространственной вибрации позволяет определить наличие малых значений проекций вектора пространственной вибрации на оси чувствительности ортогональных каналов (выражения (21) - (26), таблицы 5 и 7);
- заявляемый способ позволяет обнаружить неисправности в ортогональных каналах с малыми значениями проекций вектора пространственной вибрации на их оси чувствительности (таблицы 6 и 9).
Приведенные выше сведения подтверждают возможность осуществления изобретения, достижения указанного выше результата и решения поставленной задачи: обеспечения возможности определения работоспособности каналов преобразователя пространственной вибрации непосредственно на работающем объекте при любых соотношениях проекций вектора пространственной вибрации на оси чувствительности отдельных ортогональных каналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ ПОВЫШЕНИЯ ЕГО ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ | 2017 |
|
RU2667336C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ КОНТРОЛЯ ЕГО РАБОТОСПОСОБНОСТИ НА РАБОТАЮЩЕМ ОБЪЕКТЕ | 2015 |
|
RU2602408C1 |
| Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте | 2021 |
|
RU2764504C1 |
| СПОСОБ ПОВЕРКИ ТРЕХКОМПОНЕНТНЫХ ВИБРОПРЕОБРАЗОВАТЕЛЕЙ | 2014 |
|
RU2567987C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| БЕСПРОВОДНОЙ ТРЁХКАНАЛЬНЫЙ ДАТЧИК ВИБРАЦИИ | 2021 |
|
RU2765333C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ВИБРАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2658577C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
Изобретение относится к измерительной технике. Преобразователь пространственной вибрации устанавливают на объекте и подключают его каналы в соответствии с инструкцией по эксплуатации к источникам питания и аналого-цифровому преобразователю, а последний - к персональному компьютеру с предварительно установленной программой обработки информации. На преобразователь пространственной вибрации воздействуют вибрацией работающего объекта и на выходах каналов получают сигналы, которые измеряют и запоминают в одной ортогональной и трех косоугольных пространственных системах координат. После приведения значений проекций пространственного вектора вибрации объекта в трех косоугольных системах координат к значениям их проекций в ортогональной системе определяют четыре значения модуля вектора вибрации в каждой из пространственных систем координат, среднее арифметическое значение и отклонение значений модуля вектора пространственной вибрации от среднего арифметического значения. Сравнением с предварительно заданным предельно допускаемым отклонением предварительно определяют работоспособность преобразователя пространственной вибрации на работающем объекте. Затем определяют относительные разности между средним арифметическим значением вектора пространственной вибрации и измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя, сравнивают с заданным первым дополнительным предельным значением относительных разностей, по результатам сравнения определяют проекции вектора пространственной вибрации на ортогональные оси чувствительности с малыми значениями, после чего определяют абсолютные относительные отклонения расчетных значений ортогональных проекций от своих измеренных значений, сравнивают эти отклонения с заданным вторым дополнительным предельным значением отклонений, определяют исправность каналов с малыми значениями ортогональных проекций и делают окончательный вывод о работоспособности преобразователя пространственной вибрации. Технический результат - возможность получения объективной информации о состоянии работоспособности преобразователя. 2 ил., 9 табл.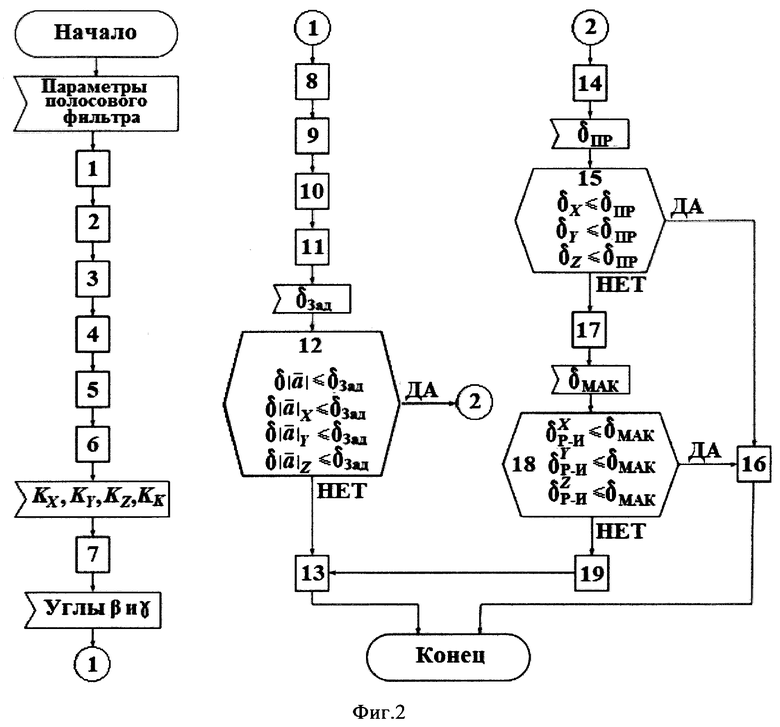
Способ определения работоспособности преобразователя пространственной вибрации на работающем объекте, заключающийся в том, что одновременно измеряют и запоминают все значения проекций воздействующего на преобразователь вектора пространственной вибрации объекта - в одной ортогональной и трех косоугольных пространственных системах координат, приводят значения проекций вектора пространственной вибрации объекта в трех косоугольных системах координат к значениям их проекций в ортогональной системе и определяют четыре значения модуля вектора вибрации в каждой из пространственных систем координат, среднее арифметическое значение, отклонение каждого из четырех значений модуля вектора пространственной вибрации от среднего арифметического значения, сравнивают с заданным предельным отклонением и по результатам этих сравнений предварительно определяют работоспособность исследуемого преобразователя пространственной вибрации на работающем объекте, отличающийся тем, что дополнительно определяют абсолютные значения относительных разностей между средним арифметическим значением и измеренными абсолютными значениями проекций вектора пространственной вибрации на ортогональные оси чувствительности преобразователя, сравнивают их с заданным первым дополнительным предельным значением относительных разностей, по результатам сравнения определяют ортогональные проекции вектора пространственной вибрации с малыми значениями, определяют абсолютные значения относительных отклонений расчетных значений ортогональных проекций от своих измеренных значений, сравнивают эти отклонения с заданным вторым дополнительным предельным значением отклонений, определяют исправность ортогональных каналов с малыми значениями проекций и делают окончательный вывод о работоспособности всех каналов преобразователя пространственной вибрации.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ КОНТРОЛЯ ЕГО РАБОТОСПОСОБНОСТИ НА РАБОТАЮЩЕМ ОБЪЕКТЕ | 2015 |
|
RU2602408C1 |
| Смирнов В.Я | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Смирнов В.Я., Блохин А.Л., Орлов А.В., Скворцов Д.В | |||
| ПРОВЕРКА РАБОТОСПОСОБНОСТИ ТРЁХКОМПОНЕНТНОГО ВИБРОПРЕОБРАЗОВАТЕЛЯ // Мир измерений | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| С | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ ПОВЫШЕНИЯ ЕГО ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ | 2017 |
|
RU2667336C1 |
| FR | |||

