Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте.
Группа изобретений относится к измерительной технике и может быть использована для обеспечения контроля работоспособности средства измерения пространственной вибрации объекта непосредственно во время его работы.
Как правило, для измерения пространственной вибрации в жестких условиях (широкие динамический и частотный диапазоны, высокие и низкие темпреатуры, влажность и т.д.) применяются пьезоэлектрические вибропреобразователи, которые обладают рядом преимуществ перед иными вибропреобразователями (индукционными, вихретоковыми, емкостными и т.д.) [См., например, Вибрации в технике: Справочник. В 6-ти т. / Ред. совет: В.Н. Челомей (пред.). - М.: Машиностроение, 1981 - Т. 5. Измерения и испытания. - под ред. М.Д. Генкина. 1981. - с 220-226]. Однако в процессе эксплуатации на пьезоэлектрический вибропреобразователь действует большое количество влияющих факторов как внешнего (температурные, электрические, магнитные поля, ударные нагрузки и т.д.) так и внутреннего характера (старение пьезокерамики, ослабление винтовых соединений, нарушение электрических контактов в самом вибропреобразователе и в соединительных кабелях и т.д.). Все это может привести к тому, что в процессе эксплуатации такой параметр пьезоэлектрического вибропреобразователя, как коэффициент преобразования изменится настолько, что выйдет за пределы, допускаемые условиями эксплуатации. В этом случае информация о действующей на него пространственной вибрации будет недостоверной. Поэтому контроль исправности средств измерения параметров вибрации, ответственных за безопасность работающих, особенно летающих объектов, является важной технико-экономической задачей.
В случае нарушения работоспособности этих средств измерения выдается искаженная информация о вибрационном состоянии работающего объекта по неизвестной причине, принуждающая операторов принимать решение, неадекватное возникшим обстоятельствам.
Известен пьезоэлектрический вибропреобразователь АРЗ8 АБКЖ.433641.005, зарегистрированный в Госреестре под номером 16601-05 и предназначенный для одновременного измерения трех составляющих пространственного вибрационного ускорения для систем вибродиагностики машинного оборудования и для лабораторных исследований.
Известный вибропреобразователь содержит корпус, размещенную в корпусе ортогональную систему однокомпонентных вибропреобразователей, выходной разъем и отверстие в центре корпуса для крепления к объекту измерения.
Известен также «Пьезоэлектрический вибропреобразователь» (RU 72076 U1, G01P 15/09, 27.03.2008), который предназначен для измерения пространственных деформационных параметров силовых агрегатов и конструкций и может быть использован при диагностике машин и оборудования в том числе и в авиационной промышленности и является аналогом заявляемого устройства и может быть принять за прототип.
Известный вибропреобразователь содержит корпус с элементом инвариантного крепления к объекту, размещенный в корпусе пакетник с ортогональной системой однокомпонентных вибропреобразователей и выходной разъем для вывода проводников съема заряда.
Известен способ бездемонтажного определения работоспособности однокомпонентного пьезоэлектрического вибропреобразователя на неработающем объекте - «Способ бездемонтажной поверки пьезоэлектрического вибропреобразователя на месте эксплуатации», RU 2524743, G01H 11/08, 10.08.2014, использующий возбуждение принудительных механических колебаний в пьезопакете исследуемого однокомпонентного пьезоэлектрического вибропреобразователя путем подачи на его электроды электрического гармонического сигнала переменной частоты.
К причинам невозможности применения известного способа для определения работоспособности трехкомпонентного пьезоэлектрического вибропреобразователя относится то, что при электрическом возбуждении одного из компонентов трехкомпонентного вибропреобразователя при бездемонтажной поверке только на неработающем объекте возникает взаимное влияние на все компоненты из-за их расположения в одном корпусе и соответствующее искажение результатов измерений, не позволяющих правильно оценить состояние даже проверяемого компонента вибропреобразователя.
Известно также, например, «Устройство резервирования акселерометров в системе управления летательного аппарата» (RU 2308068, G05D 1/00, H05K 10/00, 27.05.2005), предназначенного для решения другой задачи - управления движением центра масс летательного аппарата за счет получения достоверной информации о величине и направлении линейного кажущегося ускорения или кажущейся скорости.
Для этого вычислитель кажущегося ускорения известного устройства всегда должен получать информацию как минимум с трех любых из четырех пространственно разнесенных акселерометров с однокомпонентными низкочастотными преобразователями ускорения, векторы осей чувствительности которых некомпланарны и неколлинеарны. Три из четырех вибропреобразователей образуют ортогональную систему координат, а ось чувствительности четвертого - резервного вибропреобразователя составляет с каждым из трех одинаковый угол.
Известное техническое решение предназначено для поддержания работоспособности устройства в случае выхода из строя одного из трех ортогональных компонентов за счет его функциональной замены резервным вибропреобразователем.
В отличие от заявляемого технического решения для контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте, известное устройство предназначено для решения другой задачи - резервирования акселерометров в системе управления летательного аппарата и, несмотря на сходную ориентацию датчиков акселерометров, по своему назначению, сущности и достигаемому результату не может быть признано аналогом заявляемого технического решения.
Заявитель в уровне техники в отечественных и зарубежных источниках не обнаружил средств для решения задачи по контролю работоспособности пьезоэлектрических преобразователей пространственной вибрации непосредственно на работающих объектах.
Задачей, на решение которой направлена заявляемая группа изобретений, является обеспечение возможности проверки непосредственно на работающем объекте работоспособности каналов пространственного пьезоэлектрического вибропреобразователя.
Технический результат, получаемый при осуществлении заявляемой группы изобретений, заключается в обеспечении возможности в случае получения недостоверной информации о вибрационных параметрах работающего объекта получить объективную информацию о состоянии работоспособности измерительного преобразователя вектора пространственной вибрации объекта.
Указанный технический результат достигается при осуществлении заявляемой группы разнообъектных изобретений, образующих единый изобретательский замысел и представляющих собой четырехкомпонентный пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте.
Указанный технический результат при осуществлении изобретения достигается тем, что заявляемый пьезоэлектрический преобразователь пространственной вибрации, содержащий размещенную в корпусе ортогональную систему из трех однокомпонентных пьезоэлектрических вибропреобразователей, разъемный контактный вывод и элементы крепления к объекту измерения, в отличие от известного преобразователя, снабжен установленным в корпусе дополнительным четвертым идентичным однокомпонентным вибропреобразователем, ось чувствительности которого проходит через центр ортогональной системы, предпочтительно совмещена с плоскостью, проходящей через вертикальную ось чувствительности преобразователя и биссектрису угла между его горизонтальными осями чувствительности ортогональной системы, ориентирована под известным острым углом относительно вертикальной оси ортогональной системы и известными углами относительно каждой из горизонтальных осей, при этом ось чувствительности дополнительного вибропреобразователя совместно с ортогональной системой образует три дополнительные, некомпланарные и неколлинеарные пространственные косоугольные трехкомпонентные системы координат.
Указанный технический результат при осуществлении изобретения достигается тем, что заявляемый способ определения работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте заключается в том, что одновременно измеряют и запоминают все значения проекций пространственного вектора вибрации объекта, воздействующего на все четыре компоненты преобразователя - одной ортогональной и трех косоугольных пространственных систем координат, приводят значения проекций пространственного вектора вибрации объекта в трех косоугольных системах координат к значениям их проекций в ортогональных системах и определяют четыре значения модуля воздействующего вектора вибрации в каждой из этих пространственных систем, определенные четыре значения модуля воздействующего вектора вибрации суммируют и определяют его среднее арифметическое значение, затем определяют отклонение каждого из четырех значений модуля воздействующего вектора вибрации в соответствующей пространственной системе координат от среднего арифметического значения, сравнивают с предварительно заданным предельно допускаемым отклонением и по результатам этих сравнений определяют работоспособность исследуемого пьезоэлектрического преобразователя на работающем объекте.
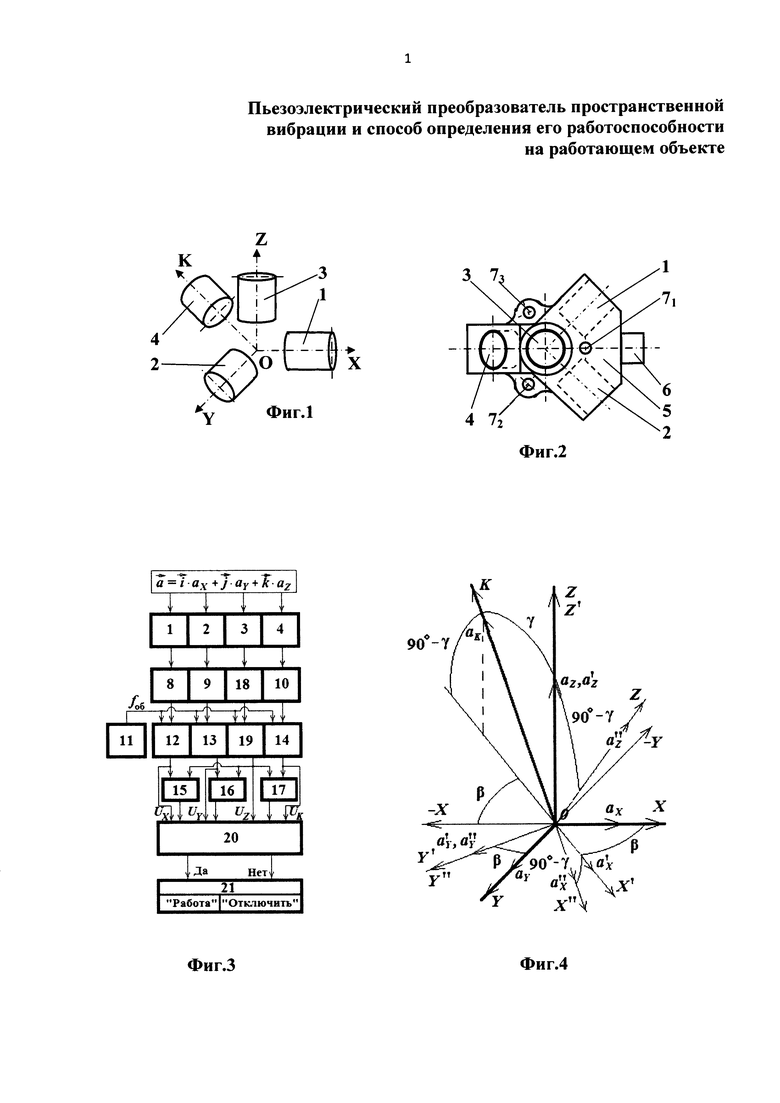
На фиг. 1 изображено пространственное расположение четырех однокомпонентных вибропреобразователей заявляемого пьезоэлектрического преобразователя пространственной вибрации (ПППВ). На фиг. 2 изображен корпус предпочтительного исполнения заявляемого ПППВ, вид сверху. На фиг. 3 представлена блок-схема устройства. На фиг. 4 приведена схема преобразования координат при определении расчетного значения проекции вектора виброускорения на ось чувствительности X.
В процессе разработки и изготовления опытных образцов ПППВ выяснилось, что наиболее оптимальной конструкцией с технологической точки зрения является выполнение корпуса, при котором ось чувствительности четвертого дополнительного однокомпонентного вибропреобразователя в соответствии с первым пунктом формулы предпочтительно совмещена с плоскостью, проходящей через вертикальную ось и биссектрису угла между горизонтальными осями ортогональной системы и ориентирована под острым углом 45° к вертикальной оси Z и под равными углами 120° к горизонтальным осям Х и Y.
Пьезоэлектрический преобразователь пространственной вибрации (фиг. 1) содержит ортогональную систему XYZ однокомпонентных пьезоэлектрических вибропреобразователей (ОПВ) - по оси X - ОПВ 1, по оси Y - ОПВ 2, по оси Z - ОПВ 3 и контрольный четвертый ОПВ 4. Ось чувствительности ОПВ 4 совмещена с плоскостью, проходящей через вертикальную ось Z и биссектрису угла между горизонтальными осями Х и 7 ортогональной системы и ориентирована под острым углом (45°) к вертикальной оси Z и под равными углами (120°) к горизонтальным осям Х и Y. Все ОПВ 1-4 установлены (фиг. 2) в корпусе 5 ПППВ, который снабжен разъемным контактным выводом 6 электрических выходов ОПВ и тремя стандартизованно расположенными отверстиями 71, 72 и 73 для крепления к объекту измерения. Каждый из трех каналов ОПВ 1, 2 и 4 содержит (фиг. 3) усилители заряда 8, 9 и 10, узкополосные перестраиваемые с помощью задатчика частоты 11 фильтры 12, 13 и 14, измерители разности фаз 15-17. Канал ОПВ 3 содержит усилитель заряда 18, узкополосный перестраиваемый с помощью задатчика частоты 11 и фильтр 19. Кроме того, ПППВ содержит АЦП и вычислительное устройство ВУ 20 и коммутатор 21.
Способ контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте основан на следующих положениях.
У установленного на работающем объекте (на фиг. не показан) ПППВ одновременно измеряют и запоминают значения проекций пространственного вектора вибрации объекта, воздействующего на все четыре компоненты преобразователя, образующих одну ортогональную и три косоугольных пространственных систем координат. Амплитуды проекций вектора виброускорения, действующие на оси чувствительности ПППВ имеют следующий вид:




где a X, a Y, a Z, a K - амплитуды проекций вектора виброускорения на оси чувствительности X, Y, Z и K ПППВ соответственно;
kX, kY, kZ и kK - коэффициенты преобразования каналов X, Y, Z и K соответственно, (в каждый канал X, Y и K включают однокомпонентный пьезоэлектрический вибропреобразователь, согласующий усилитель и измеритель разности фаз, в канал Z включают однокомпонентный пьезоэлектрический вибропреобразователь и согласующий усилитель);
 ,
,  ,
,  и
и  - амплитудные значения выходных напряжений каналов X Y, Z и K соответственно.
- амплитудные значения выходных напряжений каналов X Y, Z и K соответственно.
Приводят значения проекций пространственного вектора вибрации объекта в трех косоугольных системах координат (OXYK; OYZK; OXZK) к значениям их проекций в ортогональной системе координат (OXYZ). Для этого с помощью проекции вектора виброускорения на ось чувствительности контрольного канала a
K определяют расчетные значения проекций вектора виброускорения на оси чувствительности ортогональной системы координат (для косоугольной системы координат OXYK на ось чувствительности Z -  ; для косоугольной системы координат OYZK на ось чувствительности X -
; для косоугольной системы координат OYZK на ось чувствительности X -  ; для косоугольной системы координат OXZK на ось чувствительности Y -
; для косоугольной системы координат OXZK на ось чувствительности Y -  ). Ниже в качестве примера определено расчетное значение проекции вектора виброускорения на ортогональную ось чувствительности X -
). Ниже в качестве примера определено расчетное значение проекции вектора виброускорения на ортогональную ось чувствительности X -  .
.
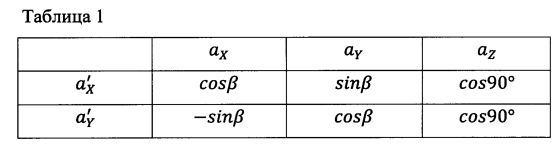
Для определения расчетного значения проекции вектора виброускорения на ортогональную ось чувствительности X исходная ортогональная система координат OXYZ разворачивается относительно оси Z на угол β и образуется новая система координат OX′Y′Z′ (см. фиг. 4), [см., например, Выгодский М.Я. Справочник по высшей математике. М.: ГИ физико-математической литературы. 1963 - с 197; Иориш Ю.И. Виброметрия. М.: ГНТИ машиностроительной литературы. 1963 - с 69-74].
В новой ортогональной системе координат OX′Y′Z′ проекции вектора виброускорения  ,
,  и
и  определяют с помощью углов между осями систем координат OXYZ и OX′Y′Z′, которые приведены в таблице 1:
определяют с помощью углов между осями систем координат OXYZ и OX′Y′Z′, которые приведены в таблице 1:

Следующий поворот осей координат осуществляется относительно оси Y′ на угол (90°-γ) до совмещения осей X′ и K с образованием новой ортогональной системы координат OX″Y″Z″. Проекции вектора виброускорения на оси ортогональной системы координат OX″Y″Z″ определяются с помощью углов, приведенных в таблице 2.
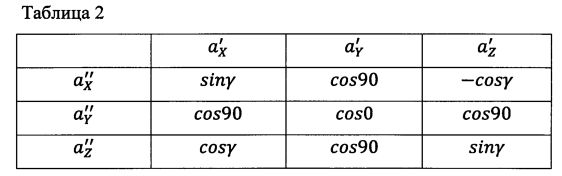
Аналитические выражения проекций вектора виброускорения на оси ортогональной системы координат OX″Y″Z″, определенные с помощью таблиц 1 и 2, имеют вид:
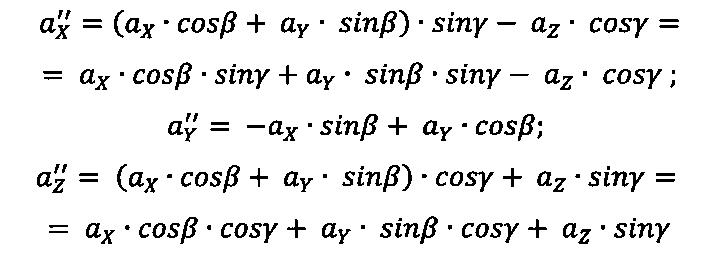
Так как проекция вектора виброускорения на ось чувствительности контрольного канала ПППВ не зависит от системы координат, в которой она определяется (у всех конечных и промежуточных ортогональных систем координат начало координат в одной точке O), а с отрицательным направлением контрольного канала совмещено положительное направление оси чувствительности X″, то
 , откуда
, откуда

По аналогии получают расчетные значения проекций вектора виброускорения на оси чувствительности Y и Z:


С помощью расчетных значений проекций (5)-(7) определяют четыре значения модуля вектора виброускорения в четырех системах координат:




Рассчитывают среднее арифметическое значение модуля вектора виброускорения:

после чего определяют относительные отклонения рассчитанных значений модулей вектора виброускорения от среднего арифметического значения:




Сравнивают относительные отклонения (13)-(16) с заданным предельным значением:




Если неравенства (17)-(20) выполняются, то работоспособность ПППВ подтверждается и вырабатывается команда «Работа». Если неравенства не выполняются, то работоспособность ПППВ не подтверждается и вырабатывается команда «Отключить».
Устройство, реализующее способ определения работоспособности ПППВ на работающем объекте (фиг. 3), работает следующим образом.
При первичной поверке в соответствии с рекомендациями ГОСТ Р 8.669-2009 на методы и средства поверки определяются требуемые метрологические характеристики всех каналов ПППВ, в т.ч. и действительные значения коэффициентов преобразования каждого канала, а также фиксируются углы между осью чувствительности контрольного канала K и ортогональными осями чувствительности X, Y и Z (определяются значения углов β и γ, см. фиг. 4). После установки на место эксплуатации в соответствии с интервалом времени, установленным в руководстве по эксплуатации, осуществляют проверку работоспособности пьезоэлектрического вибропреобразователя в следующей последовательности.
Так как в процессе эксплуатации объекта на ПППВ действует вектор виброускорения  , проекции которого a
X, a
Y, a
Z и a
K на оси чувствительности ОПВ 1-4, то с помощью прямого пьезоэффекта на ОПВ 1-4 образуются заряды, пропорциональные воздействующим проекциям вектора виброускорения a
X, a
Y, a
Z и a
K, поступающим на входы усилителей заряда 8-10, 17, где преобразуются в пропорциональные значения напряжений, а с выходов усилителей заряда - на узкополосные перестраиваемые фильтры 12-14, 19. Узкополосные перестраиваемые фильтры 12 - 14, 19 в общем случае с помощью задатчика частоты 11 выделяют близкий к гармоническому сигналу на оборотной частоте ƒоб. Сигналы UX, UY, UZ и UK с выходов узкополосных перестраиваемых фильтров 12-14, 19 поступают на вычислительный блок 20, объединяющий АЦП и вычислительное устройство, и на входы измерителей разности фаз 15-17 между сигналами каналов Z и Х - φZX, Z и Y - φZY, Z и K - φZK (как правило, эти разности фаз должны быть близки или к 0° или 180°). На блок 20 также поступают сигналы с выходов измерителей разности фаз 15-17. В блоке 20 сигналы преобразуются с помощью АЦП в цифровой вид и дальнейшая обработка информации проводится в цифровом виде. Вначале в вычислительном устройстве 20 определяются по формулам (1)-(4) и фиксируются в заданный момент времени значения амплитуд проекций a
X, a
Y, a
Z и a
K вектора виброускорения С помощью проекции вектора виброускорения на ось чувствительности контрольного канала a
K определяются по формулам (5)-(7) расчетные значения проекций
, проекции которого a
X, a
Y, a
Z и a
K на оси чувствительности ОПВ 1-4, то с помощью прямого пьезоэффекта на ОПВ 1-4 образуются заряды, пропорциональные воздействующим проекциям вектора виброускорения a
X, a
Y, a
Z и a
K, поступающим на входы усилителей заряда 8-10, 17, где преобразуются в пропорциональные значения напряжений, а с выходов усилителей заряда - на узкополосные перестраиваемые фильтры 12-14, 19. Узкополосные перестраиваемые фильтры 12 - 14, 19 в общем случае с помощью задатчика частоты 11 выделяют близкий к гармоническому сигналу на оборотной частоте ƒоб. Сигналы UX, UY, UZ и UK с выходов узкополосных перестраиваемых фильтров 12-14, 19 поступают на вычислительный блок 20, объединяющий АЦП и вычислительное устройство, и на входы измерителей разности фаз 15-17 между сигналами каналов Z и Х - φZX, Z и Y - φZY, Z и K - φZK (как правило, эти разности фаз должны быть близки или к 0° или 180°). На блок 20 также поступают сигналы с выходов измерителей разности фаз 15-17. В блоке 20 сигналы преобразуются с помощью АЦП в цифровой вид и дальнейшая обработка информации проводится в цифровом виде. Вначале в вычислительном устройстве 20 определяются по формулам (1)-(4) и фиксируются в заданный момент времени значения амплитуд проекций a
X, a
Y, a
Z и a
K вектора виброускорения С помощью проекции вектора виброускорения на ось чувствительности контрольного канала a
K определяются по формулам (5)-(7) расчетные значения проекций 
 и
и  на оси чувствительности ПППВ X, Y и Z, которые используются для определения по формулам (8)-(11) четырех значений модуля вектора виброускорения
на оси чувствительности ПППВ X, Y и Z, которые используются для определения по формулам (8)-(11) четырех значений модуля вектора виброускорения  ,
,  ,
,  и
и  . Определяется среднее арифметическое значение модуля вектора виброускорения
. Определяется среднее арифметическое значение модуля вектора виброускорения  по (12) и относительные
по (12) и относительные
отклонения четырех значений модуля вектора виброускорения , , и от среднего арифметического значения по формулам (13)-(16). Относительные отклонения от среднего арифметического значения модуля вектора виброускорения  ,
,  ,
,  ,
,  сравниваются с предварительно заданным предельным допускаемым отклонением
сравниваются с предварительно заданным предельным допускаемым отклонением  (формулы (17)-(20)). Если результаты сравнения удовлетворяют требованиям (17)-(20), то вырабатывается положительная команда, направляемая на коммутатор 21 для продолжения работы ПППВ, т.к. работоспособность ПППВ подтверждается. Если результаты сравнения не удовлетворяют требованиям (17)-(20), то вырабатывается отрицательная команда, направляемая на коммутатор 21 для отключения ПППВ, т.к. работоспособность ПППВ не подтверждается (один или несколько каналов вышли из строя).
(формулы (17)-(20)). Если результаты сравнения удовлетворяют требованиям (17)-(20), то вырабатывается положительная команда, направляемая на коммутатор 21 для продолжения работы ПППВ, т.к. работоспособность ПППВ подтверждается. Если результаты сравнения не удовлетворяют требованиям (17)-(20), то вырабатывается отрицательная команда, направляемая на коммутатор 21 для отключения ПППВ, т.к. работоспособность ПППВ не подтверждается (один или несколько каналов вышли из строя).
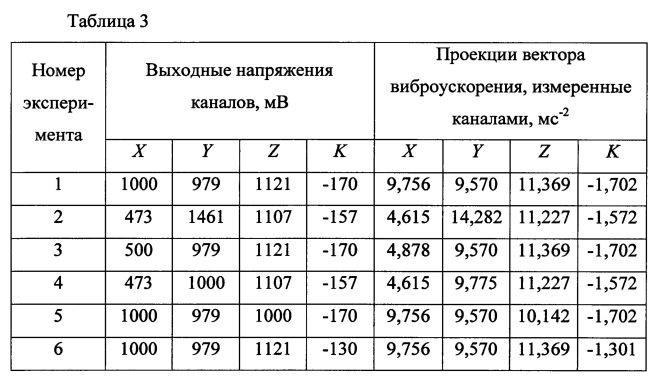
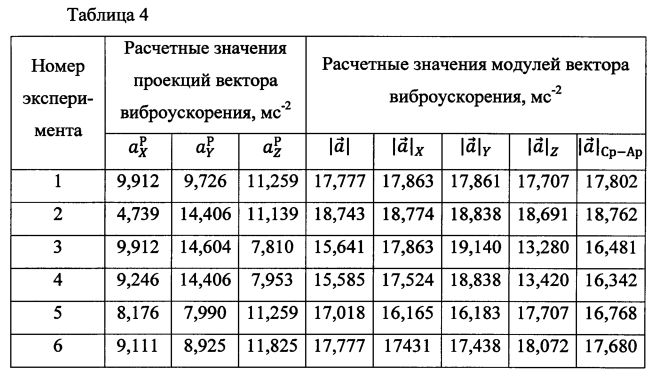
На нашем предприятии был изготовлен и испытан опытный образец ПППВ. В опытном образце угол у между осью чувствительности Z и осью чувствительности контрольного канала составляет 45°, углы между осью чувствительности контрольного канала K и осями чувствительности X и Y составляют 120° (в этом случае угол β=45°). В таблице 3 приведены исходные данные, полученные измерением с помощью опытного образца проекций вектора виброускорения  на оси чувствительности. В таблице 4 приведены данные, полученные расчетным путем, а в таблице 5 - расчеты отклонений, позволяющие оценить работоспособность опытного образца пьезоэлектрического преобразователя виброускорения. При этом для моделирования ситуации возникновения дефектов в образце последовательно искусственно изменялись коэффициенты преобразования согласующих усилителей каналов X, Y и Z (в таблице 5 приведены данные степени изменения коэффициентов преобразования каналов).
на оси чувствительности. В таблице 4 приведены данные, полученные расчетным путем, а в таблице 5 - расчеты отклонений, позволяющие оценить работоспособность опытного образца пьезоэлектрического преобразователя виброускорения. При этом для моделирования ситуации возникновения дефектов в образце последовательно искусственно изменялись коэффициенты преобразования согласующих усилителей каналов X, Y и Z (в таблице 5 приведены данные степени изменения коэффициентов преобразования каналов).
Действительные значения коэффициентов преобразования канала X  ; канала Y
; канала Y  канала Z
канала Z  ; канала K
; канала K  , принимается, что
, принимается, что  .
.
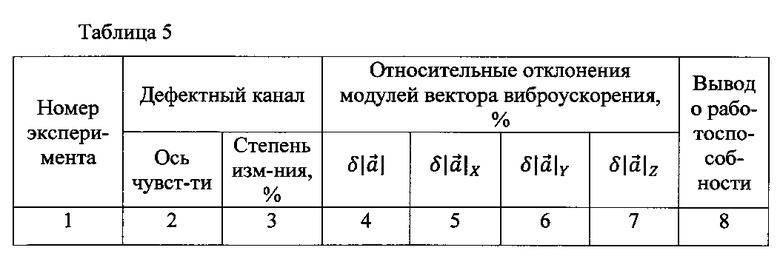
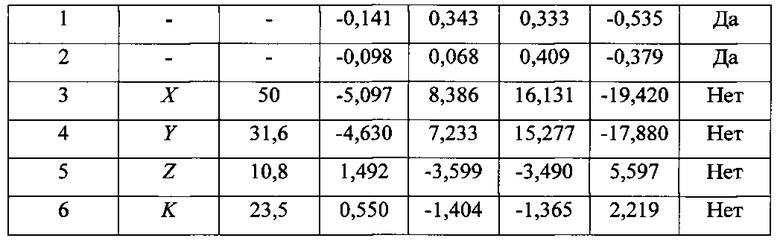
Приведенные в таблице 5 относительные отклонения (графы 4-7) сравниваются с заданным предельным значением отклонения, которое в данном случае , после чего можно сделать вывод, что в первых двух экспериментах опытный образец пьезоэлектрического преобразователя виброускорения следует признать работоспособным, т.к. абсолютные значения относительных отклонений не превышают 1%, а в последующих четырех - неработоспособным (абсолютные значения относительных отклонений превышают заданное предельное значение). При этом, в последних четырех случаях последовательно изменялись коэффициенты преобразования всех четырех каналов ПППВ.
Таким образом, видно, что приведенные выше сведения подтверждают возможность осуществления устройства и способа определения работоспособности трехкомпонентного пьезоэлектрического вибропреобразователя на работающем объекте, достижения указанного технического результата и решения поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ ПОВЫШЕНИЯ ЕГО ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ | 2017 |
|
RU2667336C1 |
| Способ определения работоспособности преобразователя пространственной вибрации на работающем объекте | 2021 |
|
RU2775572C1 |
| Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте | 2021 |
|
RU2764504C1 |
| СПОСОБ ПОВЕРКИ ТРЕХКОМПОНЕНТНЫХ ВИБРОПРЕОБРАЗОВАТЕЛЕЙ | 2014 |
|
RU2567987C1 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| СПОСОБ МОНИТОРИНГА МАШИН И СООРУЖЕНИЙ | 2008 |
|
RU2371691C1 |
| СПОСОБ И 3D-ПРИЕМНИК ИЗМЕРЕНИЯ ВЕКТОРА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2530479C2 |
| Многокоординатный вибростенд | 1985 |
|
SU1283571A1 |
| БЕСПРОВОДНОЙ ТРЁХКАНАЛЬНЫЙ ДАТЧИК ВИБРАЦИИ | 2021 |
|
RU2765333C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ВОЗДЕЙСТВИЯ МНОГОКОМПОНЕНТНОЙ ВИБРАЦИИ ПРИ ВИБРОИСПЫТАНИЯХ ОБЪЕКТОВ НА СООТВЕТСТВИЕ ТЕХНИЧЕСКИМ ТРЕБОВАНИЯМ | 2022 |
|
RU2788584C1 |
Изобретение относится к метрологии. Пьезоэлектрический преобразователь содержит ортогональную систему из четырех однокомпонентных вибропреобразователей. Ось чувствительности четвертого преобразователя проходит через центр ортогональной системы координат и ориентирована относительно каждой из осей под заданными углами и образует с осями три некомпланарные и неколлинеарные пространственные косоугольные системы координат. Ось чувствительности четвертого преобразователя предпочтительно совмещена с плоскостью, проходящей через вертикальную ось и биссектрису угла между горизонтальными осями ортогональной системы координат и ориентирована под острым углом к вертикальной оси. Корпус преобразователя содержит разъем и элементы крепления. Контроль работоспособности преобразователя предполагает определение значений проекций ортогонального и косоугольного пространственного вектора вибрации объекта, которые приводят к ортогональной системе координат. Затем определяют модули вектора вибрации, их суммируют и определяют среднее значение. Вычисляют отклонение вибрации от среднего значения, сравнивают эти отклонения c заданным отклонением и определяют работоспособность преобразователя. Технический результат - получение объективной информации о функционировании устройства. 2 н.п. ф-лы, 4 ил., 5 табл.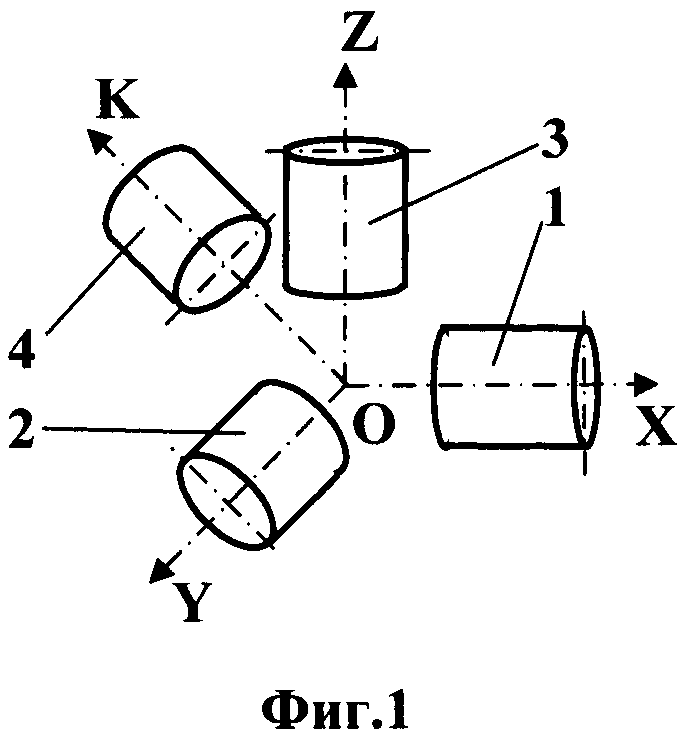
1. Пьезоэлектрический преобразователь пространственной вибрации, содержащий размещенную в корпусе ортогональную систему из трех однокомпонентных пьезоэлектрических вибропреобразователей, разъемный контактный вывод и элементы крепления к объекту измерения, отличающийся тем, что преобразователь снабжен установленным в корпусе дополнительным четвертым идентичным однокомпонентным вибропреобразователем, ось чувствительности которого проходит через центр ортогональной системы, предпочтительно совмещена с плоскостью, проходящей через вертикальную ось чувствительности преобразователя и биссектрису угла между его горизонтальными осями чувствительности ортогональной системы, ориентирована под известным острым углом относительно вертикальной оси ортогональной системы и известными углами относительно каждой из горизонтальных осей, при этом ось чувствительности дополнительного вибропреобразователя совместно с ортогональной системой образует три дополнительные, некомпланарные и неколлинеарные пространственные косоугольные трехкомпонентные системы координат.
2. Способ контроля работоспособности пьезоэлектрического преобразователя пространственной вибрации на работающем объекте, заключающийся в том, что одновременно измеряют и запоминают все значения проекций пространственного вектора вибрации объекта, воздействующего на все четыре компоненты преобразователя - одной ортогональной и трех косоугольных пространственных систем координат, приводят значения проекций пространственного вектора вибрации объекта в трех косоугольных системах координат к значениям их проекций в ортогональных системах и определяют четыре значения модуля воздействующего вектора вибрации в каждой из этих пространственных систем, определенные четыре значения модуля воздействующего вектора вибрации суммируют и определяют его среднее арифметическое значение, затем определяют отклонение каждого из четырех значений модуля воздействующего вектора вибрации в соответствующей пространственной системе координат от среднего арифметического значения, сравнивают с предварительно заданным предельно допускаемым отклонением и по результатам этих сравнений определяют работоспособность исследуемого пьезоэлектрического преобразователя на работающем объекте.
| US 7066004 B1, 27.06.2006 | |||
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2308068C2 |
| ТРЕХКОМПОНЕНТНЫЙ ДАТЧИК МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2383025C1 |
| СПОСОБ И 3D-ПРИЕМНИК ИЗМЕРЕНИЯ ВЕКТОРА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2530479C2 |
| ПУЛЬСАЦИОННОЕ ПЕРЕМЕШИВАЮЩЕЕ УСТРОЙСТВО КОЛЬЦЕВОГО АППАРАТА | 2010 |
|
RU2446494C2 |
| JP 2009063586 A, 26.03.2009 | |||
| ТРЕХКОМПОНЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ СТРУННЫЙ АКСЕЛЕРОМЕТР | 1995 |
|
RU2101712C1 |
| WO 2013067590 A1, 16.05.2013 | |||
| US 3304787 A1, 21.02.1967.. | |||

