Изобретение относится к устройствам автоматического управления и может быть использовано при построении систем управления, современных летательных аппаратов (ЛА).
Для управления движением центра масс ЛА используется информация о векторе кажущегося ускорения. В этом случае в неизбыточном варианте необходимо реализовать на ЛА измерительный базис; образуемый системой трех векторов, связанных с осями чувствительности одностепенных акселерометров.
Для повышения точности и надежности работы системы управления ЛА широко применяется резервирование как каналов управления в целом, так и входящих в них акселерометров. Известно устройство резервирования акселерометров в системе управления ЛА, где для управления движением центра масс ЛА включены три идентичных канала управления, при этом число акселерометров получается равным девяти, т.е. в каждом канале по три акселерометра [А.Д.Епифанов. Надежность систем управления. - М: Машиностроение, 1975, с 128-129].
Данное построение устройства резервирования акселерометров в системе управления ЛА приводит к увеличению массово-габаритных показателей измерительных комплексов систем управления.
Наиболее близким техническим решением к предлагаемому изобретению является устройство резервирования акселерометров в системе управления летательного аппарата, содержащее пять акселерометров, вычислитель кажущегося ускорения, пять суммирующих блоков, пять компараторов нуля, дешифратор и коммутатор, подключенный первым, вторым и третьим выходами к соответствующим информационным входам вычислителя кажущегося ускорения, четвертым выходом - к первым входам первого и второго суммирующих блоков и к объединенным первому и второму входам третьего и четвертого суммирующих блоков, пятым выходом - ко вторым входам первого и второго суммирующих блоков, к третьему и четвертому входам третьего суммирующего блока и к первому и второму входам пятого суммирующего блока, шестым выходом - к третьим входам первого и второго суммирующих блоков, к третьему и четвертому входам четвертого суммирующего блока и третьему и четвертому входам пятого суммирующего блока, выходы первого, второго и третьего акселерометров связаны с соответствующими информационными входами коммутатора, подключенного первым, вторым и третьим управляющими входами соответственно к первому, второму и третьему управляющим входам вычислителя кажущегося ускорения и к соответствующим выходам дешифратора, а четвертым информационным входом к выходу первого суммирующего блока и к первому входу первого компаратора нуля, связанного выходом с первым входом дешифратора, выходы второго, третьего, четвертого и пятого суммирующих блоков соединены с первыми входами соответствующих компараторов нуля, подключенных вторыми входами к шине нулевого потенциала, а выходами - к соответствующим входам дешифратора, связанного четвертым и пятым выходами с четвертым и пятым управляющими входами вычислителя кажущегося ускорения, выход четвертого акселерометра подключен к четвертому входу первого суммирующего блока и к пятым входам третьего, четвертого и пятого суммирующих блоков, выход пятого акселерометра соединен с четвертым входом второго суммирующего блока и с шестыми входами третьего, четвертого и пятого суммирующих блоков [Патент РФ №2050713, 1996 г.]. Данное устройство обеспечивает работоспособность системе управления в случае отказа одного акселерометра из пяти размещенных на борту ЛА. Однако размещение пяти акселерометров в устройстве резервирования акселерометров в системе управления летательного аппарата увеличивает массово-габаритные показатели измерительного комплекса ЛА.
Целью изобретения является снижение массогабаритных показателей измерительного комплекса системы управления ЛА путем снижения количества акселерометров (до четырех) в устройстве резервирования акселерометров в системе управления ЛА.
Указанная цель достигается тем, что устройство резервирования акселерометров в системе управления ЛА, содержащее четыре акселерометра, вычислитель кажущегося ускорения, четыре суммирующих блока, три компаратора, дешифратор и коммутатор, подключенный первым, вторым и третьим выходами к соответствующим информационным входам вычислителя кажущегося ускорения, выходы первого, второго и третьего акселерометров соединены с информационными входами коммутатора, управляющие входы которого подключены к выходам дешифратора, входы которого подключены к выходам компараторов, выход первого акселерометра подключен к первым входам первого, третьего и четвертого суммирующих блоков, выход второго акселерометра подключен ко второму входу первого, к первому входу второго и ко второму входу четвертого суммирующих блоков, выход третьего акселерометра подключен к третьему входу первого, ко второму входу второго и третьего суммирующих блоков, выход четвертого акселерометра подключен к третьим входам второго, третьего и четвертого суммирующих блоков и к соответствующему информационному входу коммутатора, выход первого суммирующего блока подключен к первым входам первого, второго и третьего компараторов, ко вторым входам которых подключены выходы соответственно второго, третьего и четвертого суммирующих блоков.
Новизной и существенным отличием предлагаемого изобретения является то, что в устройстве резервирования акселерометров в системе управления ЛА было сокращено количество акселерометров до четырех, а также уменьшено количество сумматоров до четырех и компараторов до трех в отличие от прототипа.
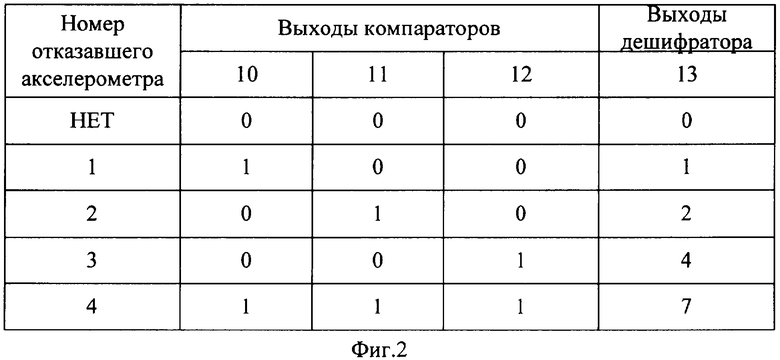
На фиг.1 показана структурная схема предлагаемого устройства резервирования акселерометров в системе управления летательного аппарата, содержащего четыре акселерометра 1-4, вычислитель кажущегося ускорения 5, четыре суммирующих блока 6-9, три компаратора 10-12, дешифратор 13 и коммутатор 14, подключенный первым, вторым и третьим выходами к соответствующим информационным входам вычислителя кажущегося ускорения 5, выходы первого, второго и третьего акселерометров 1-3 соединены с информационными входами коммутатора 14, управляющие входы которого подключены к выходам дешифратора 13, входы которого подключены к выходам компараторов 10-12, выход первого акселерометра 1 подключен к первым входам первого, третьего и четвертого суммирующих блоков 6, 8 и 9, выход второго акселерометра 2 подключен ко второму входу первого, к первому входу второго и ко второму входу четвертого суммирующих блоков 6, 7 и 9, выход третьего акселерометра 3 подключен к третьему входу первого, ко второму входу второго и третьего суммирующих блоков 6-8, выход четвертого акселерометра 4 подключен к третьим входам второго, третьего и четвертого суммирующих блоков 7-9 и к соответствующему информационному входу коммутатора 14, выход первого суммирующего блока 6 подключен к первым входам первого, второго и третьего компараторов 10-12, ко вторым входам которых подключены выходы соответственно второго, третьего и четвертого суммирующих блоков 7-9.
Очевидно, что для управления движением центра масс ЛА в систему управления необходимо выдавать достоверную информацию о величине и направлении линейного кажущегося ускорения -  или кажущейся скорости -
или кажущейся скорости -  (в случае, если акселерометры 1-4 интегрирующие). В этом случае вычислитель кажущегося ускорения 5 всегда должен получать информацию как минимум с трех любых акселерометров из 1-4 оси, чувствительности которых не компланарны и не коллениарны. Поэтому в устройстве резервирования акселерометров в системе управления оси чувствительности акселерометров 1, 2 и 3 образуют ортогональную систему координат, а ось чувствительности акселерометра 4 составляет с ними одинаковый угол β. Суммирующие блоки 6-9 реализуют следующие функции:
(в случае, если акселерометры 1-4 интегрирующие). В этом случае вычислитель кажущегося ускорения 5 всегда должен получать информацию как минимум с трех любых акселерометров из 1-4 оси, чувствительности которых не компланарны и не коллениарны. Поэтому в устройстве резервирования акселерометров в системе управления оси чувствительности акселерометров 1, 2 и 3 образуют ортогональную систему координат, а ось чувствительности акселерометра 4 составляет с ними одинаковый угол β. Суммирующие блоки 6-9 реализуют следующие функции:




где IΣ6, IΣ7, IΣ8, IΣ9, - выходные сигналы суммирующих блоков 6-9,
I1, I2, I3, I4 - выходные сигналы акселерометров 1-4.
Под отказом акселерометра будем понимать ту величину его погрешности, которая приводит к появлению различных сигналов на входах компараторов 10-12 (выходах суммирующих блоков 6-9), т.е. компараторы 10-12 сравнивают выходной сигнал суммирующего блока 6 [выражение (1)] соответственно с выходными сигналами суммирующих блоков [выражениями (2), (3) и (4)]. В случае равенства входных сигналов каждого из компараторов 10-12 на их выходах вырабатываются логические нули, в противном случае - логические единицы. Понятно, что выходной сигнал акселерометра 4 умножается на cosβ [выражения (2), (3) и (4)].
В качестве компараторов 10-12 могут применяться аналогово-цифровые преобразователи по А.Г.Алексеенко и др. Применение прецизионных аналоговых микросхем. М.: Радио и связь, 1989, с.150-160.
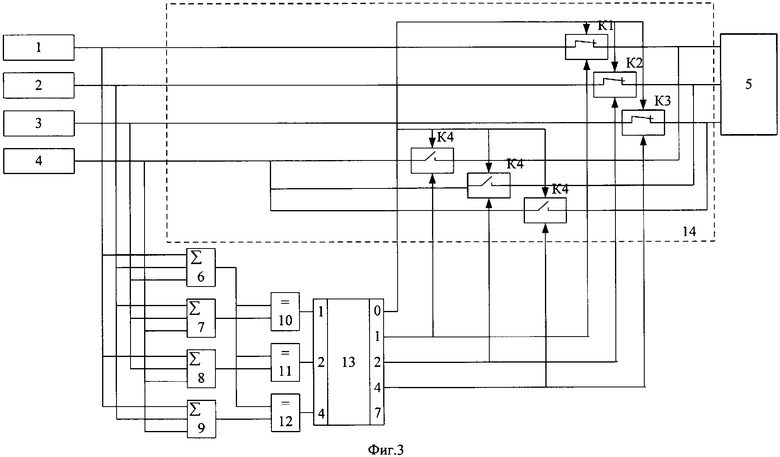
На фиг.2 представлена таблица входных и выходных сигналов дешифратора 13 для случая, когда отказов акселерометров 1-4 нет и для случаев одного отказа из акселерометров 1-4 (для входных кодов дешифратора 13 - младший разряд справа).
На фиг.3 представлена функциональная схема устройства резервирования акселерометров в системе управления ЛА, где К1, К2, К3 и К4 обозначены ключи коммутатора 14, причем сигнал по стрелке сверху устанавливает ключи в исходное состояние (ключи К1-К3 замкнуты, ключи К4 разомкнуты), сигнал по стрелке снизу переводит ключи К1-К4 в противоположное состояние.
Работает устройство следующим образом. В случае исправной работы акселерометров 1-4 (исходное состояние) управление ЛА (вычисление или ) производится по показаниям акселерометров 1, 2 и 3, т.е. на выходе дешифратора 13 вырабатывается «0» (фиг.2) и тогда ключи К1-К3 коммутатора 14 (фиг.3) замкнуты, а ключи К4 разомкнуты. Вычисление производится по трем его ортогональным проекциям в вычислителе кажущегося ускорения 5 (фиг.3). При отказах одного из акселерометров 1-4 состояния компараторов 10-12 будут меняться согласно таблицы фиг.2. Например, при отказе акселерометра 1 на выходе компараторов 10-12 вырабатывается код 100 и возбуждается выход «1» дешифратора 13 (фиг.2 и 3), по которому размыкается ключ К1 и замыкается ключ К4 коммутатора 14. В вычислитель кажущегося ускорения 5 поступает сигнал с трех акселерометров 2, 3 и 4, по которым производится вычисление . Аналогично при отказах акселерометров 2 или 3. При отказе акселерометра 4 на выходе компараторов 10-12 вырабатывается код 111 (фиг.2) и возбуждается выход «7» дешифратора 13 (фиг.2 и 3), который не используется и управление ЛА производится по показаниям акселерометров 1, 2 и 3, т.е. ключи К1-К3 коммутатора 14 (фиг.3) замкнуты, а ключи К4 разомкнуты. Все коды таблицы фиг.2 взаиморазличимы, т.е. имеется возможность в устройстве диагностировать отказ любого одного из четырех акселерометров 1-4 при полете ЛА.
За базовый объект принят прототип. В отличие от базового объекта, предлагаемое устройство резервирования акселерометров в системе управления ЛА содержит на один меньше акселерометров, суммирующих блоков и компараторов, что ведет к снижению массогабаритных показателей измерительного комплекса системы управления ЛА и к упрощению устройства в целом. Предлагаемое устройство может быть использовано в ракетно-космической технике. Оно сохраняет свою работоспособность при отказах любого одного из четырех акселерометров. Снижение количества акселерометров и блоков ведет также к увеличению надежности работы измерительного комплекса системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2050713C1 |
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1996 |
|
RU2142645C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ ДАТЧИКОВ В СИСТЕМЕ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1986 |
|
SU1394985A1 |
| УСТРОЙСТВО МОНИТОРИНГА ИНФОРМАЦИОННОГО ТРАФИКА | 2005 |
|
RU2290691C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2004 |
|
RU2281549C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
Предлагаемое изобретение может быть использовано при построении акселерометрических измерительных комплексов систем управления ракетно-технической техники. Технический результат заключается в снижении массогабаритных показателей измерительного комплекса системы управления летательного аппарата и повышении надежности его работы. Для этого в устройстве применена следующая ориентация осей чувствительности четырех акселерометров: три оси чувствительности составляют ортогональную систему координат, а ось чувствительности четвертого составляет с ними одинаковый угол, причем устройство, кроме акселерометров, содержит вычислитель кажущегося ускорения, четыре суммирующих блока, три компаратора, дешифратор и коммутатор. 3 ил.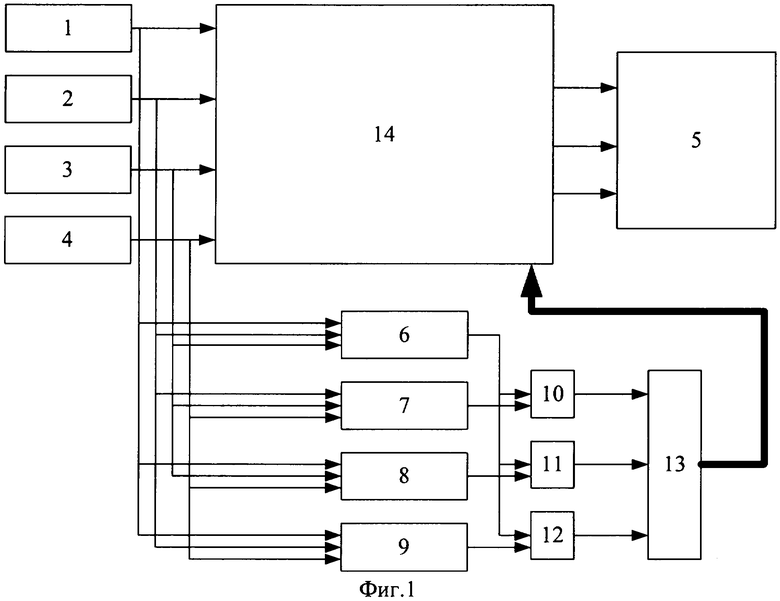
Устройство резервирования акселерометров в системе управления летательного аппарата, содержащее четыре акселерометра, вычислитель кажущегося ускорения, четыре суммирующих блока, три компаратора, дешифратор и коммутатор, подключенный первым, вторым и третьим выходами к соответствующим информационным входам вычислителя кажущегося ускорения, выходы первого, второго и третьего акселерометров соединены с информационными входами коммутатора, управляющие входы которого подключены к выходам дешифратора, входы которого подключены к выходам компараторов, отличающееся тем, что выход первого акселерометра подключен к первым входам первого, третьего и четвертого суммирующих блоков, выход второго акселерометра подключен ко второму входу первого, к первому входу второго и ко второму входу четвертого суммирующих блоков, выход третьего акселерометра подключен к третьему входу первого, ко второму входу второго и третьего суммирующих блоков, выход четвертого акселерометра подключен к третьим входам второго, третьего и четвертого суммирующих блоков и к соответствующему информационному входу коммутатора, выход первого суммирующего блока подключен к первым входам первого, второго и третьего компараторов, ко вторым входам которых подключены выходы соответственно второго, третьего и четвертого суммирующих блоков.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2050713C1 |
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1996 |
|
RU2142645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЕКЦИЙ ПАРАМЕТРОВ ИНЕРЦИАЛЬНОГО ДВИЖЕНИЯ НА ОСИ, СВЯЗАННОЙ С ОБЪЕКТОМ СИСТЕМЫ КООРДИНАТ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2061967C1 |
| US 4358823 А, 09.11.1982. | |||

