Изобретение относится к области авиации и может быть использовано в пилотажно-навигационном оборудовании летательных аппаратов.
Из уровня техники известны различные способы формирования управляющих сигналов на механизацию крыла с использованием сигналов ГРМ, которые повышают точность пилотирования [Крамер Г. Математические методы статистики. - М.: Мир, 1978], [Кендалл М.Дж., Стьюарт А. Теория распределений. - М.: Наука, 1966], [Shakarian A. Application of Monte-Carlo techniques to the 757/767 auto land dispersion analysis by Simulation // AIAA Guidance and Control Conference, New York, USA, 1983].
Однако в силу ряда причин совместное управление интерцепторами и рулем высоты не было реализовано на практике.
Из уровня техники известен способ управления продольным движением самолета на посадке, основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются основной управляющий сигнал на привод руля высоты и вспомогательный управляющий сигнал на привод секций интерцепторов, величина которых оказывает влияние на строгость автоматического управления самолетом и изменяется в зависимости от величины угла (εц) между вектором траекторной скорости самолета и направлением на программно имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета, а также скоростью изменения упомянутого угла [Навигация и управление летательными аппаратами./Под общей редакцией А.Г. Кузнецова/ Труды МИЭА. Вып. 6. М., 2013, сс. 2-16].
Известный способ имеет следующие недостатки:
1. Неучет при формировании сигналов параметров бокового движения, указывающих на возможность выкатывания самолета за боковую кромку взлетно-посадочной полосы ВПП (малые возмущения в боковом движении), что значительно увеличивает дистанцию пробега: вплоть до выкатывания самолета в продольном направлении за торец взлетно-посадочной полосы.
2. Низкую эффективность управляющих воздействий на пробеге в условиях низких коэффициентов сцепления, сильных боковых возмущений, так как характеристики летчика определяют большой напряженностью по отношению к управлении на выравнивание на пробеге по взлетно-посадочной полосе (ВПП) и понижением качества управления самолетом на этапе после посадочного пробега в условиях значительных боковых возмущающих воздействий и ошибок управления.
Наиболее близким по технической сущности к предлагаемому изобретению является известный способ управления продольным движением самолета на посадке, основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются основной управляющий сигнал на привод руля высоты и вспомогательный управляющий сигнал на привод секций интерцепторов, величина которых оказывает влияние на строгость автоматического управления самолетом и изменяется в зависимости от величины угла (εц) между вектором траекторной скорости самолета и направлением на программно имитируемую «цель. (патент RU №2588173, заявка на изобретение №2015120723 от 02.06.2015, заявитель Акционерное общество Московский институт электромеханики и автоматики, автор Гребенкин Александр Витальевич, опубликован 27.06. 2016 Бюл. №18).
Известный способ имеет следующие недостатки:
1. Неучет при формировании сигналов параметров бокового движения, указывающих на возможность выкатывания самолета за боковую кромку ВПП (малые возмущения в боковом движении), что значительно увеличивает дистанцию пробега: вплоть до выкатывания самолета в продольном направлении за торец взлетно-посадочной полосы (ВПП).
2. Низкую эффективность управляющих воздействий на пробеге в условиях низких коэффициентов сцепления, сильных боковых возмущений, так как характеристики летчика определяют большой напряженностью по отношению к управлении на выравнивание на пробеге по взлетно-посадочной полосы (ВПП) и понижением качества управления самолетом на этапе после посадочного пробега в условиях значительных боковых возмущающих воздействий и ошибок управления, за счет чего уменьшается безопасность полетов на самом ответственном участке полета - посадки самолета,
Задачей заявляемого способа является разработка многорежимного способа дифференциального автоматического управления тормозами колес и секциями интерцепторов, путем воздействия вспомогательных управляющих сигналов при пробеге самолета на тормоза колес и секции интерцепторов, за счет чего повышается безопасность полетов на самом ответственном участке полета - посадке самолета, а также расширяет ожидаемые условия эксплуатации самолетов.
Техническим результатом заявляемого способа является:
1. Разгрузка экипажа, при которой характеристика летчика определяет ослабление напряженности по отношению к управлении на выравнивание на пробеге по взлетно-посадочной полосы (ВПП) и повышения качества управления самолетом повышение безопасности полетов на этапе после посадочного пробега в условиях значительных боковых возмущающих воздействий и ошибок управления, а также расширяются ожидаемые условия эксплуатации самолетов.
2. Повышение эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления и сильных боковых возмущений.
Технический результат достигается тем, что по сравнению с изобретением принятым за прототип, способом управления продольным движением самолета на посадке, основанным на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, в которой формируется упомянутый вспомогательный управляющий сигнал на привод секций интерцепторов и управляющие сигналы на другие элементы системы управления самолетом, величина которых оказывает влияние на строгость автоматического управления самолетом, в заявляемом способе вначале упомянутое формирование вспомогательных управляющих сигналов на пробеге самолета, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, осуществляют путем воздействия на автоматическое дифференциальное управления тормозами колес и упомянутыми секциями интерцепторов по признаку обжатия передней стойки шасси при получении сигнала с соответствующего концевого выключателя и в зависимости от скорости раскрутки тормозных колес каждой основной опоры больше или равной 37 км/ч, затем автоматическое дифференциальное управление тормозами колес основных стоек шасси осуществляют путем имитации обжатия левой и правой педалей тормоза, где состояние 0 и 1 для левой и/или правой педали тормоза, причем состояние 0 - педали тормоза не обжаты, а колеса полностью расторможены, а состояние 1 - педали тормоза полностью обжаты, а колеса полностью заторможены, причем торможение колес выполняют путем линейного увеличения тормозного момента до максимальной величины за 2 сек при полностью заторможенных колесах и осуществляют линейное уменьшение тормозного момента до нуля за 1 сек при полностью расторможенных колесах, при этом на пробеге контролируют степень заторможенности колес, для чего определяют фактическое состояние взлетно-посадочной полосы (ВПП) и величину посадочной дистанции, а также контролируют направление бокового смещения самолета относительно оси взлетно-посадочной полосы (ВПП) и угол отклонения носового колеса, причем формирование сигналов на секции интерцепторов осуществляют по состоянию имитации обжатия левой и/или правой педали тормоза, при этом вначале осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние
для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек.
для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек.
Такими существенными отличительными признаками, как, «вначале упомянутое формирование вспомогательных управляющих сигналов на пробеге самолета, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, осуществляют путем воздействия на автоматическое дифференциальное управления тормозами колес и упомянутыми секциями интерцепторов по признаку обжатия передней стойки шасси при получении сигнала с соответствующего концевого выключателя и в зависимости от скорости раскрутки тормозных колес каждой основной опоры больше или равной 37 км/ч, затем автоматическое дифференциальное управление тормозами колес основных стоек шасси осуществляют путем имитации обжатия левой и правой педалей тормоза, где состояние 0 и 1 для левой и/или правой педали тормоза, причем состояние 0 - педали тормоза не обжаты, а колеса полностью расторможены, а состояние 1 - педали тормоза полностью обжаты, а колеса полностью заторможены, причем торможение колес выполняют путем линейного увеличения тормозного момента до максимальной величины за 2 сек при полностью заторможенных колесах и осуществляют линейное уменьшение тормозного момента до нуля за 1 сек при полностью расторможенных колесах, при этом на пробеге контролируют степень заторможенности колес, для чего определяют фактическое состояние взлетно-посадочной полосы (ВПП) и величину посадочной дистанции, а также контролируют направление бокового смещения самолета относительно оси взлетно-посадочной полосы (ВПП) и угол отклонения носового колеса», достигается технический результат разгрузка экипажа, при которой характеристика летчика определяет ослабление напряженности по отношению к управлении на выравнивание на пробеге по взлетно-посадочной полосы (ВПП) и повышения качества управления самолетом на этапе после посадочного пробега в условиях значительных боковых возмущающих воздействий и ошибок управления, за счет чего повышается безопасность полетов на самом ответственном участке полета - посадке самолета, а также расширяет ожидаемые условия эксплуатации самолетов.
Такими существенными отличительными признаками, как «причем формирование сигналов на секции интерцепторов осуществляют по состоянию имитации обжатия левой и/или правой педали тормоза, при этом вначале осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние
для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек, достигается технический результат - повышение эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления и сильных боковых возмущений.
для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек, достигается технический результат - повышение эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления и сильных боковых возмущений.
Система автоматического дифференциального управления, реализующая способ формирования вспомогательных управляющих сигналов на пробеге самолета поясняется чертежами, на которых изображены.
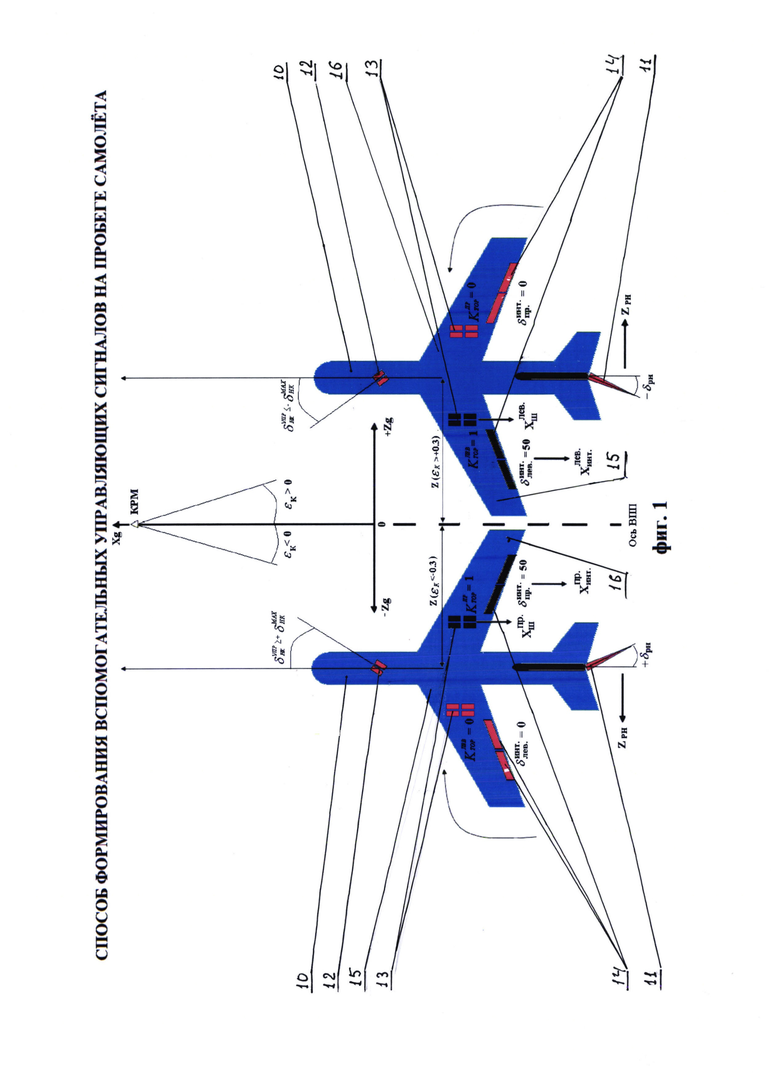
Фиг. 1. Логика автоматического дифференциального управления тормозами колес основных опор шасси и секциями интерцепторов.
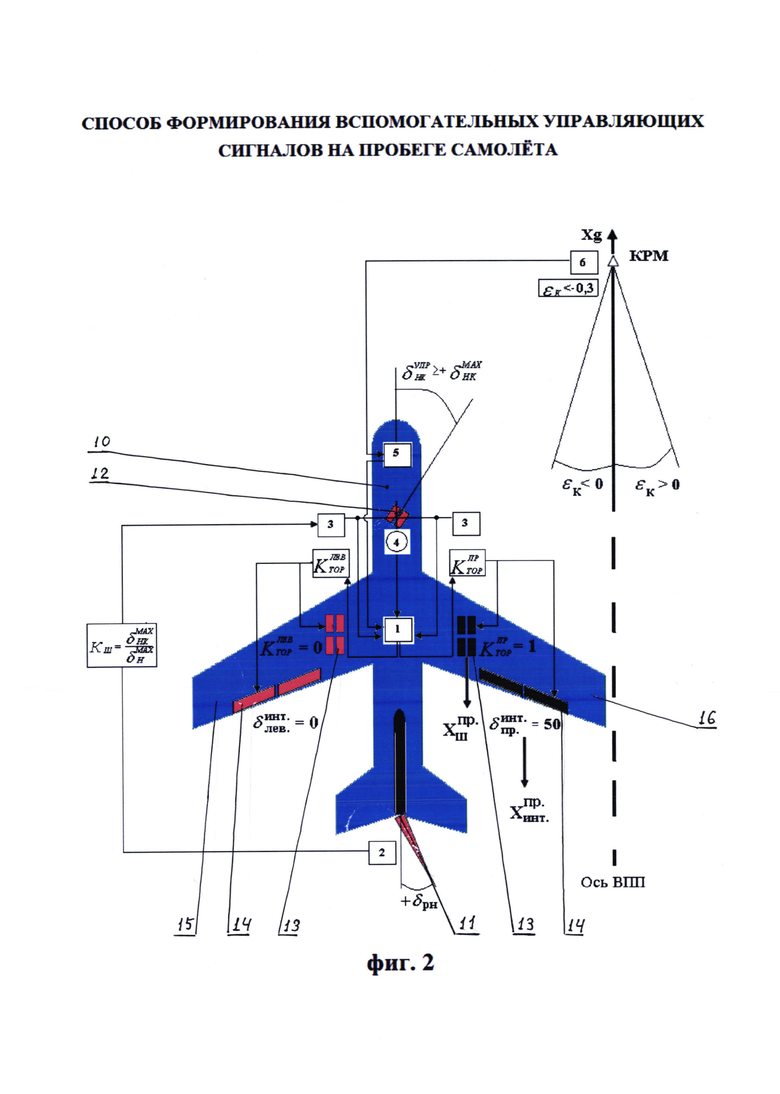
Фиг. 2. Схема формирования управляющих сигналов.
Фиг. 3. Результаты математического моделирования посадки самолета Ту-204СМ на влажную взлетно-посадочную полосу (ВПП) в условиях бокового ветра 15 м/с и отказавшим на глиссаде критическим двигателем, без использования логики автоматического дифференциального управления тормозами колес основных опор шасси и секциями интерцепторов.
Фиг. 4. Результаты математического моделирования посадки самолета Ту-204СМ на влажную взлетно-посадочную полосу (ВПП) в условиях бокового ветра 15 м/с и отказавшим на глиссаде критическим двигателем, с использованием логики автоматического дифференциального управления тормозами колес основных опор шасси и секциями интерцепторов.
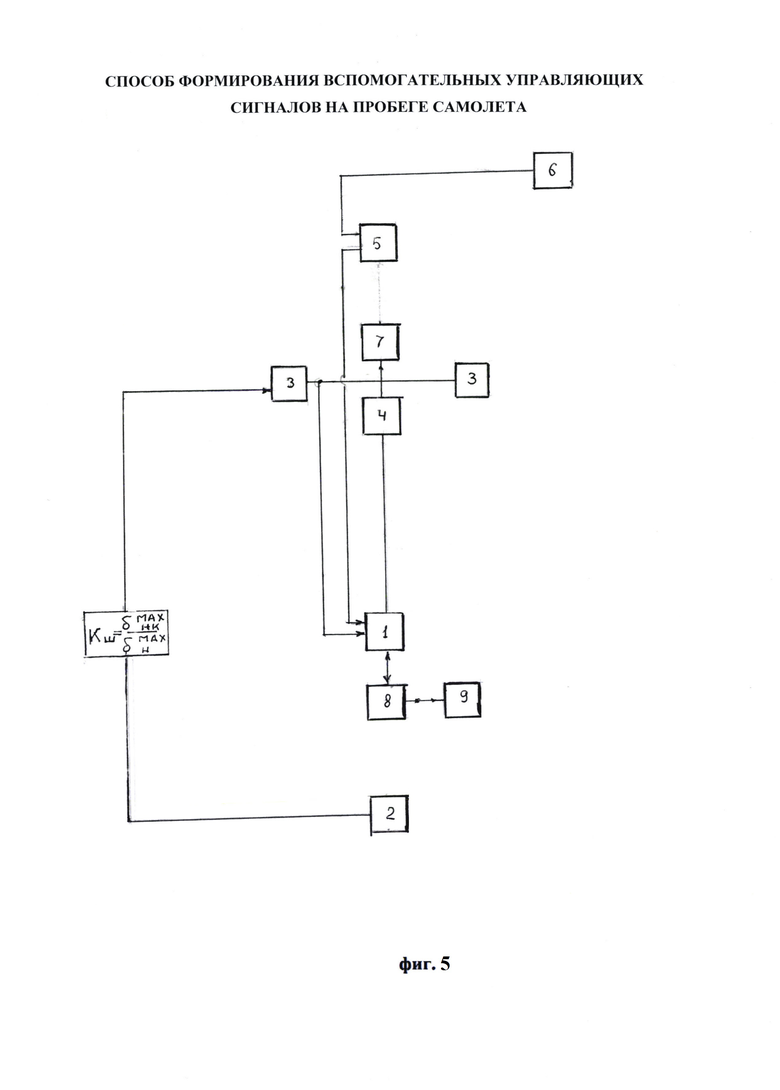
Фиг. 5 Структурная схема системы автоматического дифференциального управления.
Сущность изобретения способа формирования вспомогательных управляющих сигналов на пробеге самолета
Система автоматического дифференциального управления, реализующая способ формирования вспомогательных управляющих сигналов на пробеге самолета содержит бортовой вычислитель 1 (фиг. 2, 5), датчик угла отклонения руля направления 2 (фиг. 2, 5), датчик угла отклонения носового колеса 3 (фиг. 2, 5), датчик обжатия, представляющий собой концевой выключатель 4 (фиг. 2, 5), бортовой радиоприемник 5 (фиг. 2, 5) и курсовой радиомаяка 6 (фиг. 2, 5). Система автоматического дифференциального управления, реализующая способ формирования вспомогательных управляющих сигналов на пробеге самолета, содержит блок обжатия передней стойки шасси 7 (фиг. 5). Бортовой вычислитель 1 (фиг. 2, 5) содержит блок формирования вспомогательных управляющих сигналов на привод тормозной системы и на привод интерцепторов 8 (фиг. 5). В блоке формирования вспомогательных управляющих сигналов на привод тормозной системы и на привод интерцепторов 8 (фиг. 5) бортового вычислителя 1 (фиг. 2, 5) реализуется прием и обработка входной информации с датчика угла отклонения руля направления 2 (фиг. 2, 5), датчика угла отклонения носового колеса 3 (фиг. 2, 5) системы измерения параметров полета. А в блоке обжатия передней стойки шасси 7 (фиг. 5) реализуются сигналы с датчика обжатия (концевого выключателя) 4 (фиг. 2, 3). Кроме того, система автоматического управления, реализующая данный способ, содержит счетчик времени 9 (фиг. 5). Элементы конструкции самолета 10 (фиг. 1, 2), взаимодействующие с автоматизированной системой управления полетом, реализуемой данный способ, содержат руль направления 11 (фиг. 1, 2), носовые колеса 12 (фиг. 1, 2) передней стойки шасси. Колеса 13 (фиг. 1, 2) левой и правой стоек шасси (на чертеже не показаны), секции интерцепторов 14 (фиг. 1, 2), расположенные на левом полукрыле 15 фиг. 1, 2) и на правом полукрыле 16 (фиг. 1, 2).
Задачей изобретения является загрузка экипажа, при которой характеристика летчика определяет ослабление напряженности по отношению к управлении на выравнивание на пробеге по взлетно-посадочной полосы и повышения качества управления самолетом 10 (фиг. 1, 2) на этапе после посадочного пробега в условиях значительных боковых возмущающих воздействий и ошибок управления, путем формирования вспомогательных управляющих сигналов на автоматическое дифференциальное управления тормозами колес 13 (фиг. 1, 2) и секциями интерцепторов 14 (фиг. 1, 2), а также повышение эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления, сильных боковых возмущений. Включение режима автоматического дифференциального управления тормозами колес 13 (фиг. 1, 2) и дифференциального управления секциями интерцепторов 14 (фиг. 1, 2) выполняется по признаку обжатия передней стойки шасси (на чертеже не по казана) при получении сигнала от датчика обжатия, выполненного в виде концевого выключателя 4 (фиг. 2, 5) и в зависимости от скорости раскрутки тормозных колес каждой основной опоры больше или равна 37 км/ч. Автоматическое дифференциальное управление тормозами колес 13 (фиг. 1, 2) основных стоек шасси осуществляют путем имитации обжатия левой и правой педалей тормоза (на чертеже не показаны), где состояние 0 и 1 для левой и/или правой педали тормоза, причем состояние 0 - педали тормоза не обжаты, а колеса 13 (фиг. 1, 2) полностью расторможены, а состояние 1 - педали тормоза полностью обжаты, а колеса 13 (фиг. 1, 2) полностью заторможены. Торможение колес 13 (фиг. 1, 2) осуществляют путем линейного увеличения тормозного момента до максимальной величины за 2 сек, при полностью заторможенных колесах 13 (фиг. 1, 2) и осуществляют линейное уменьшение тормозного момента до нуля за 1 сек при полностью расторможенных колесах 13 (фиг. 1, 2). При пробеге контролируют степень заторможенности колес 13 (фиг. 1, 2), для чего определяют фактическое состояние ВПП и величину посадочной дистанции, а также контролируют направление бокового смещения самолета 10 (фиг. 1, 2) относительно оси ВПП и угол отклонения носового колеса 12 (фиг. 1, 2). Формирование сигналов на секции интерцепторов 14 (фиг. 1, 2) осуществляют по состоянию имитации обжатия левой и/или правой педали тормоза (на чертеже не показаны), где состояние  для левой педали тормоза-колеса 13 (фиг. 1, 2) левой тележки шасси (на чертеже не показаны) полностью расторможены и полностью убраны секции интерцепторов 14 (фиг. 1, 2) на левом полукрыле 15 (фиг. 1, 2), при этом полную уборку секций интерцепторов 14 (фиг. 1, 2) осуществляют за 1 сек, а состояние
для левой педали тормоза-колеса 13 (фиг. 1, 2) левой тележки шасси (на чертеже не показаны) полностью расторможены и полностью убраны секции интерцепторов 14 (фиг. 1, 2) на левом полукрыле 15 (фиг. 1, 2), при этом полную уборку секций интерцепторов 14 (фиг. 1, 2) осуществляют за 1 сек, а состояние  =0 для правой педали тормоза (на чертеже не показаны) колеса 13 (фиг.1, 2) правой тележки шасси (на чертеже не показаны) полностью расторможены и полностью убраны секции интерцепторов 14 (фиг. 1, 2) на правом полукрыле 16 (фиг. 1, 2). Полную уборку секций интерцепторов 14 (фиг. 1, 2) осуществляют за 1 сек, а также где состояние
=0 для правой педали тормоза (на чертеже не показаны) колеса 13 (фиг.1, 2) правой тележки шасси (на чертеже не показаны) полностью расторможены и полностью убраны секции интерцепторов 14 (фиг. 1, 2) на правом полукрыле 16 (фиг. 1, 2). Полную уборку секций интерцепторов 14 (фиг. 1, 2) осуществляют за 1 сек, а также где состояние  для левой педали тормоза (на чертеже не показаны) колеса 13 (фиг. 1, 2) левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов 14 (фиг. 1, 2) на левом полукрыле 15 (фиг. 1, 2), при этом полный выпуск интерцепторов 14 (фиг. 1, 2) осуществляют за 2 сек, где состояние
для левой педали тормоза (на чертеже не показаны) колеса 13 (фиг. 1, 2) левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов 14 (фиг. 1, 2) на левом полукрыле 15 (фиг. 1, 2), при этом полный выпуск интерцепторов 14 (фиг. 1, 2) осуществляют за 2 сек, где состояние  для правой педали тормоза-колеса 13 (фиг. 1, 2) правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов 14 (фиг. 1, 2) на правом полукрыле 16 (фиг. 1, 2), причем полный выпуск интерцепторов 14 (фиг. 1, 2) осуществляют за 2 сек, решается задача повышение эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления и сильных боковых возмущений.
для правой педали тормоза-колеса 13 (фиг. 1, 2) правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов 14 (фиг. 1, 2) на правом полукрыле 16 (фиг. 1, 2), причем полный выпуск интерцепторов 14 (фиг. 1, 2) осуществляют за 2 сек, решается задача повышение эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления и сильных боковых возмущений.
Система автоматического управления, реализующая данный способ, работает следующим образом.
Основной управляющий сигнал от пилота поступает на руль направления 11. Угол отклонения руля направления 11 регистрируется датчиком угла отклонения руля направления 2. По углу отклонения руля направления 11 посредством коэффициента Кш пилот управляет рулем направления 11 и через Кш углом отклонения носового колеса 12 формируется угол отклонения носового колеса 12, который регистрируется датчиком угла отклонения носового колеса 3. Сигнал с датчика обжатия (концевого выключателей) 4 установленного на штоке амортизатора передней стойки шасси (на чертеже не показана), поступают в блок выработки признаков обжатия 7 и осуществляют обжатие передней стойки шасси (на чертеже не показана). Сигнал от курсового радиомаяка 6 принимается на самолете бортовым радиоприемником 5 и передается в бортовой вычислитель 1. Кроме сигнала от бортового радиоприемника 5, бортовой вычислитель 1 принимает сигналы от датчика угла отклонения носового колеса 3 и датчика обжатия (концевого выключателя) 4 передней амортизационной стойки шасси (на чертеже не показана). Автоматическое дифференциальное управление тормозами колес 13 основных опор шасси (на чертеже не показана) и секциями интерцепторов 14 на пробеге к выполняется следующими операциями. По признаку обжатия передней стойки шасси (на чертеже не показана), сигнал с датчика обжатия 4, выполненного в виде концевого выключателя 4 и скорости раскрутки по тормозных колес 13 каждой основной опоры больше или равна 37 км/ч формируется управляющий сигнал полного обжатия левой  и правой
и правой  педали тормоза, изменение
педали тормоза, изменение  и
и  от 0, колеса 13 полностью расторможены, до 1,колеса 13 полностью заторможены, за 2 сек. В случае, если колеса 13 не раскрутились, то давление в тормоза должно быть подано сразу же после задержки в 1 сек после получения сигналов обжатия передней стойки шасси. В процессе пробега контролируется направление бокового смещения самолета относительно оси ВПП, направление (знак) и величина угла отклонения носового колеса 12. При достижении максимального угла отклонения носового колеса 12 вправо (
от 0, колеса 13 полностью расторможены, до 1,колеса 13 полностью заторможены, за 2 сек. В случае, если колеса 13 не раскрутились, то давление в тормоза должно быть подано сразу же после задержки в 1 сек после получения сигналов обжатия передней стойки шасси. В процессе пробега контролируется направление бокового смещения самолета относительно оси ВПП, направление (знак) и величина угла отклонения носового колеса 12. При достижении максимального угла отклонения носового колеса 12 вправо ( ), при условии, что носовое колесо 12 находится на ограничении максимального угла отклонения более 2 сек или имеет место смещение самолета от оси ВПП влево εК<-0,3°, формируется сигнал на растормаживание колес 13 левой стойки шасси, изменение коэффициента
), при условии, что носовое колесо 12 находится на ограничении максимального угла отклонения более 2 сек или имеет место смещение самолета от оси ВПП влево εК<-0,3°, формируется сигнал на растормаживание колес 13 левой стойки шасси, изменение коэффициента  от 1 до 0 за 1 сек и сигнал на уборку секций интерцепторов на левом полукрыле 15. При условии снятия носового колеса 12 с ограничения, т.е. выполнении условия
от 1 до 0 за 1 сек и сигнал на уборку секций интерцепторов на левом полукрыле 15. При условии снятия носового колеса 12 с ограничения, т.е. выполнении условия  в течение 1 сек и уменьшении бокового смещения самолета от оси ВПП влево εК>-0,2°, формируется сигнал на повторное полное торможение колес 13 левой стойки шасси, изменение коэффициента
в течение 1 сек и уменьшении бокового смещения самолета от оси ВПП влево εК>-0,2°, формируется сигнал на повторное полное торможение колес 13 левой стойки шасси, изменение коэффициента  от 0 до 1 за 2 сек и повторный выпуск секций интерцепторов 14 на левом полукрыле 15. При достижении максимального угла отклонения носового колеса 12 влево (
от 0 до 1 за 2 сек и повторный выпуск секций интерцепторов 14 на левом полукрыле 15. При достижении максимального угла отклонения носового колеса 12 влево ( ), при условии, что носовое колесо 12 находится на ограничении максимального угла отклонения более 2 сек, по сигналу с датчика 3 или по сигналу с датчика 5 имеет или имеет место смещение самолета 10 от оси ВПП вправо (εК>+0,3°), в вычислителе 1 формируется сигнал на растормаживание колес 13 правой стойки шасси (изменение коэффициента
), при условии, что носовое колесо 12 находится на ограничении максимального угла отклонения более 2 сек, по сигналу с датчика 3 или по сигналу с датчика 5 имеет или имеет место смещение самолета 10 от оси ВПП вправо (εК>+0,3°), в вычислителе 1 формируется сигнал на растормаживание колес 13 правой стойки шасси (изменение коэффициента  от 1 до 0 за 1 сек) и сигнал на уборку секций интерцепторов на правом полу крыле 16. При условии снятия носового колеса с ограничения, т.е. выполнении условия
от 1 до 0 за 1 сек) и сигнал на уборку секций интерцепторов на правом полу крыле 16. При условии снятия носового колеса с ограничения, т.е. выполнении условия  в течение 1 сек и уменьшении бокового смещения самолета 10 от оси ВПП вправо (εК<0,2°) формируется сигнал на повторное полное торможение колес 13 правой стойки шасси (изменение коэффициента
в течение 1 сек и уменьшении бокового смещения самолета 10 от оси ВПП вправо (εК<0,2°) формируется сигнал на повторное полное торможение колес 13 правой стойки шасси (изменение коэффициента  от 0 до 1 за 2 сек) и повторный выпуск секций интерцепторов 14 на правом полукрыле 15. Повторного срабатывания сигнала на раздельное торможение колес 13 левой или правой стойки шасси и соответствующее раздельное управление секциями интерцепторов 14 не выполняется по причине возможного недопустимого увеличения длины пробега. Отключение логики формирования автоматических вспомогательных сигналов возможно на любом участке пробега путем нажатия пилотом педалей тормоза. В этом случае выполняется симметричное торможение колес 9 и симметричный выпуск всех секций интерцепторов 14 в режиме торможения. Оценка возможности формирования вспомогательных сигналов автоматической системы штурвального управления на пробеге по сухой ВПП в условиях сильных боковых возмущений и изменении качества управляющих воздействий пилота.
от 0 до 1 за 2 сек) и повторный выпуск секций интерцепторов 14 на правом полукрыле 15. Повторного срабатывания сигнала на раздельное торможение колес 13 левой или правой стойки шасси и соответствующее раздельное управление секциями интерцепторов 14 не выполняется по причине возможного недопустимого увеличения длины пробега. Отключение логики формирования автоматических вспомогательных сигналов возможно на любом участке пробега путем нажатия пилотом педалей тормоза. В этом случае выполняется симметричное торможение колес 9 и симметричный выпуск всех секций интерцепторов 14 в режиме торможения. Оценка возможности формирования вспомогательных сигналов автоматической системы штурвального управления на пробеге по сухой ВПП в условиях сильных боковых возмущений и изменении качества управляющих воздействий пилота.
Исследование возможности формирования дополнительного вспомогательного управляющего сигнала АСШУ на педали тормоза и секции интерцепторов на пробеге, по сухой ВПП в режиме штурвального управления переменной строгости было выполнено на примере посадки самолета типа Ту-204СМ. В качестве дополнительных факторов, усложняющих условия полета, были введены боковой ветер и отказ критического двигателя на глиссаде. По летным характеристикам, установленным для самолета ТУ-204СМ посадочная дистанция с максимальной посадочной массой 88 т не должна быть больше 2080 м.
Без использования логики автоматического дифференциального управления тормозами колес 13 основных опор шасси и секциями интерцепторов 14 на пробеге носовое колесо 12 и рулем направления 11 достигают максимального угла отклонения и находятся в этом положении практически до конца пробега. При этом боковое смещение от оси ВПП к концу пробега достигает величины Zg max = 25,6 м при фактической посадочной дистанции 1 лтд = 1531,2 м. С использованием логики автоматического дифференциального управления тормозами колес основных опор шасси и секциями интерцепторов на пробеге обеспечивается снятие носового колеса и руля направления с упора и устойчивое эффективное устранение бокового смещения от оси ВПП при максимальном смещении Zg max=-7,63 м при фактической посадочной дистанции Lпд=1652,3 м.
На фиг. 3 представлены результаты математического моделирования посадки самолета Ту-204СМ на влажную взлетно-посадочную полосу (ВПП) в условиях бокового ветра 15 м/с и отказавшим на глиссаде критическим двигателем. Без использования логики автоматического дифференциального управления тормозами колес 13 основных опор шасси и секциями интерцепторов 14 на пробеге носовое колесо 12 и руль направления 11 достигают максимального угла отклонения и находятся в этом положении практически до конца пробега. При этом боковое смещение от оси ВПП к концу пробега достигает величины Zg max=25,6 м при фактической посадочной дистанции Lпд=1531,2 м. С использованием логики автоматического дифференциального управления тормозами колес 13 основных опор шасси и секциями интерцепторов на пробеге обеспечивается снятие носового колеса 12 и руля направления 11 с упора и устойчивое эффективное устранение бокового смещение от оси ВПП при максимальном смещении Zg max=-7,63 м. при фактической посадочной дистанции Lпд=1652,3 м.
На фиг. 3 представлены результаты математического моделирования посадки самолета Ту-204СМ на влажную взлетно-посадочную полосу (ВПП) в условиях бокового ветра 15 м/с и отказавшим на глиссаде критическим двигателем, без использования логики автоматического дифференциального управления тормозами колес 13 основных опор шасси и секциями интерцепторов 14. Руководством по летной эксплуатации (РЛЭ) самолета Ту-204СМ ограничена скорость бокового ветра при посадке 10 м/с. На пробеге самолета (см. верхний график) носовое колесо 12 (синяя линия) и руль направления 11 (зеленая линия) достигают максимального угла отклонения и находятся в этом положении практически до конца пробега. При этом боковое смещение от оси ВПП (красная линия) к концу пробега достигает величины Zg max=25,6 м при фактической посадочной дистанции Lпд=1531,2 м. Это приведет к боковому выкатыванию самолета за пределы ВПП.
На фиг. 4 представлены результаты математического моделирования посадки самолета Ту-204СМ на влажную ВПП в условиях бокового ветра 15 м/с и отказавшим на глиссаде критическим двигателем, с использованием логики автоматического дифференциального управления тормозами колес основных опор шасси и секциями интерцепторов. На пробеге (см. верхний график) обеспечивается снятие носового колеса (синяя линия) и руля направления (зеленая линия) с упора и устойчивое эффективное устранение бокового смещение от оси ВПП (красная линия) при максимальном смещении Zg max=7,63м, при фактической посадочной дистанции Lпд=1652,3 м. Самолет останется в пределах ВПП. Техническое решение направлено на повышение безопасности полетов на самом ответственном участке полета - посадке самолета, а также расширяет ожидаемые условия эксплуатации самолетов. На самолетах, оборудованных в соответствии с предложением, формируется вспомогательный управляющий сигнал, направленный на автоматическое дифференциальное (раздельное) управление тормозами колес основных опор шасси и секций интерцепторов. Это позволит производить безопасные посадки самолетов в условиях бокового ветра на 5-10 м/с выше, ограниченных в настоящее время РЛЭ самолетов и наличии осадков на ВПП (дождь, снег), исключит задержки рейсов по погодным условиям и уходы самолетов на запасные аэродромы.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ формирования вспомогательных управляющих сигналов на пробеге самолета, в котором формирование вспомогательных управляющих сигналов на пробеге самолета, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом осуществляют путем воздействия на автоматическое дифференциальное управления тормозами колес и секциями интерцепторов.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений неизвестна заявленная последовательность операций, которая приводит к достижению более высокого уровня безопасности полетов на самом ответственном участке полета - посадке самолета, а также расширяет ожидаемые условия эксплуатации самолетов.
Предлагаемое технико-экономическая эффективность предложенного способа заключается в достижении более высокого уровня безопасности полетов на самом ответственном участке полета - посадке самолета, а также расширяет ожидаемые условия эксплуатации самолетов, за счет разгрузки экипажа, при которой характеристика летчика определяет ослабление напряженности по отношению к управлении на выравнивание на пробеге по взлетно-посадочной полосе (ВПП) и повышения качества управления самолетом на этапе после посадочного пробега в условиях значительных боковых возмущающих воздействий и ошибок управления, а также повышением эффективности управляющих воздействий на пробеге в условиях низких коэффициентов сцепления и сильных боковых возмущений.
Обозначения некоторых параметров, принятые на графиках:
Кш - коэффициент пропорциональности передачи сигнала от отклонения руля направления к колесам передней опоры шасси
Ктор - коэффициент имитации обжатия педалей тормоза колес левой (правой) основной опоры шасси, определяет степень заторможенности колес.
δнк - угол поворота колес передней опоры шасси,
δmax - максимально допустимый угол отклонения колес передней опоры шасси,
δупр - текущий угол отклонения колес передней опоры шасси,
δрн - угол отклонения руля направления,
δинт - угол отклонения интерцепторов,
Zрн - сила бокового сопротивления руля направления,
Хинт - сила аэродинамического сопротивления левой(правой) секций интерцепторов,
Хш - сила сопротивления торможению левой (правой) опор шасси - угол бокового смещения от оси ВПП по сигналу курсового радиомаяка
MUDEC - нормируемый коэффициент сцепления колес с поверхностью ВПП, определенный по деселерометру,
Y1, Y2, Y3 - вертикальные нагрузки на переднюю, правую левую стойки шасси соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2018 |
|
RU2684961C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПО КУРСУ ПРИ ПОСАДКЕ | 2013 |
|
RU2539620C1 |
| СПОСОБ РЕВЕРСИРОВАНИЯ ТЯГИ ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И РЕВЕРСИВНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2768665C1 |
| РЕВЕРСИВНОЕ УСТРОЙСТВО ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2022 |
|
RU2800256C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| САМОЛЕТ-АМФИБИЯ СХЕМЫ "ЛЕТАЮЩЕЕ КРЫЛО" | 2017 |
|
RU2668000C1 |
| ПРЕОБРАЗУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2531538C2 |


Изобретение относится к способу формирования вспомогательных управляющих сигналов на пробеге самолета. Для формирования вспомогательных сигналов используют управляющие сигналы с датчиков системы измерения параметров полета, вычислительную систему автоматического управления полетом, осуществляют автоматическое дифференциальное управление тормозами колес и секциями интерцепторов по сигналам с концевого выключателя и от скорости раскрутки тормозных колес каждой основной опоры, определяют степень заторможенности колес, контролируют направление бокового смещения относительно оси взлетно-посадочной полосы. Обеспечивается повышение безопасности полетов на этапе пробега после посадки в условиях значительных боковых возмущающих воздействий и ошибок управления. 5 ил. 
Способ формирования вспомогательных управляющих сигналов на пробеге самолета, основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, в которой формируются вспомогательные управляющие сигналы на интерцепторы и другие элементы системы управления самолетом, величина которых оказывает влияние на строгость автоматического управления самолетом, отличающийся тем, что вначале упомянутое формирование вспомогательных управляющих сигналов на пробеге самолета, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, осуществляют путем воздействия на автоматическое дифференциальное управление тормозами колес и упомянутыми секциями интерцепторов по признаку обжатия передней стойки шасси при получении сигнала с соответствующего концевого выключателя и в зависимости от скорости раскрутки тормозных колес каждой основной опоры больше или равной 37 км/ч, затем упомянутое автоматическое дифференциальное управление тормозами колес основных стоек шасси осуществляют путем имитации обжатия левой и правой педалей тормоза, где состояние 0 и 1 - для левой и/или правой педали тормоза, причем состояние 0 - педали тормоза не обжаты, а колеса полностью расторможены, а состояние 1 - педали тормоза полностью обжаты, а колеса полностью заторможены, при этом торможение колес выполняют путем линейного увеличения тормозного момента до максимальной величины за 2 сек при полностью заторможенных колесах и осуществляют линейное уменьшение тормозного момента до нуля за 1 сек при полностью расторможенных колесах, причем при пробеге контролируют степень заторможенности колес, для чего определяют фактическое состояние взлетно-посадочной полосы (ВПП) и величину посадочной дистанции, а также контролируют направление бокового смещения самолета относительно оси ВПП и угол отклонения носового колеса, причем формирование сигналов на секции интерцепторов осуществляют по состоянию имитации обжатия левой и/или правой педали тормоза, при этом вначале осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние
для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек.
для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек.
| RU 2015131643 A, 02.02.2017 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ И МАНЕВРИРОВАНИЯ | 2004 |
|
RU2403180C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ОПУСКАНИЕМ ПЕРЕДНЕЙ СТОЙКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПРОБЕГЕ ПО ПОВЕРХНОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 1992 |
|
RU2036821C1 |
| EP 3115266 A1, 11.01.2017. | |||

