Изобретение относится к области авиации и может быть использовано в пилотажно-навигационном оборудовании летательных аппаратов.
Из уровня техники известны различные способы формирования управляющих сигналов на механизацию крыла с использованием сигналов ГРМ, которые повышают точность пилотирования [Крамер Г. Математические методы статистики. - М.: Мир, 1978], [Кендалл М.Дж., Стьюарт А. Теория распределений. - М.: Наука, 1966], [Shakarian A. Application of Monte-Carlo techniques to the 757/767 auto land dispersion analysis by Simulation // AIAA Guidance and Control Conference, New York, USA, 1983].
Однако в силу ряда причин совместное управление интерцепторами и рулем высоты не было реализовано на практике.
Наиболее близким по технической сущности к предлагаемому способу является известный способ управления продольным движением самолета на посадке, основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются основной управляющий сигнал на привод руля высоты и вспомогательный управляющий сигнал на привод секций интерцепторов, величина которых оказывает влияние на строгость автоматического управления самолетом и изменяется в зависимости от величины угла (εц) между вектором траекторной скорости самолета и направлением на программно имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета, а также скоростью изменения упомянутого угла [Навигация и управление летательными аппаратами. /Под общей редакцией А.Г. Кузнецова/ Труды МИЭА. Выпуск 6. Москва, 2013, сс. 2-16].
Известный способ имеет следующие недостатки:
1. комплексное управляющее воздействие на руль высоты и секции интерцепторов рассматриваются только на этапе выравнивания;
2. для реализации автоматического управления на посадке по категории IIIc требуется формирование различных сигналов на руль высоты в зависимости от этапа полета (необходимость 3-х переключений на различные законы управления):
- на высоте круга переключение на закон стабилизации заданной высоты полета по сигналам радиовысотомера;
- на глиссаде переключение на закон стабилизации глиссады по сигналам глиссадного радиомаяка;
- на выравнивании переключение на закон управления по принципу погони за «целью».
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом является разработка многорежимного адаптивного способа управления рулем высоты и секциями интерцепторов, позволяющего реализовать по единому принципу стабилизацию заданной высоты полета, захват и стабилизацию глиссады, выравнивание с возможностью адаптации управляющих сигналов под условия полета.
Заявленный технический результат в предлагаемом способе достигается тем, что способ управления продольным движением самолета на посадке основан на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются основной управляющий сигнал на привод руля высоты и вспомогательный управляющий сигнал на привод секций интерцепторов, величина которых оказывает влияние на строгость автоматического управления самолетом и изменяется в зависимости от величины угла между вектором траекторной скорости самолета и направлением на программно имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета, а также скоростью изменения упомянутого угла, при этом согласно предлагаемому изобретению, основной управляющий сигнал на привод руля высоты реализован по общему принципу формирования и отслеживания заданной траектории движения самолета в вертикальной плоскости с подключением вспомогательного сигнала на секции интерцепторов для активной коррекции траектории на этапах захвата и стабилизации глиссады, выравнивании с реализацией, при необходимости, возможности ухода на второй круг с реализацией функции адаптации управляющих сигналов под условия полета путем возможности изменения расстояния до программно имитируемой «цели».
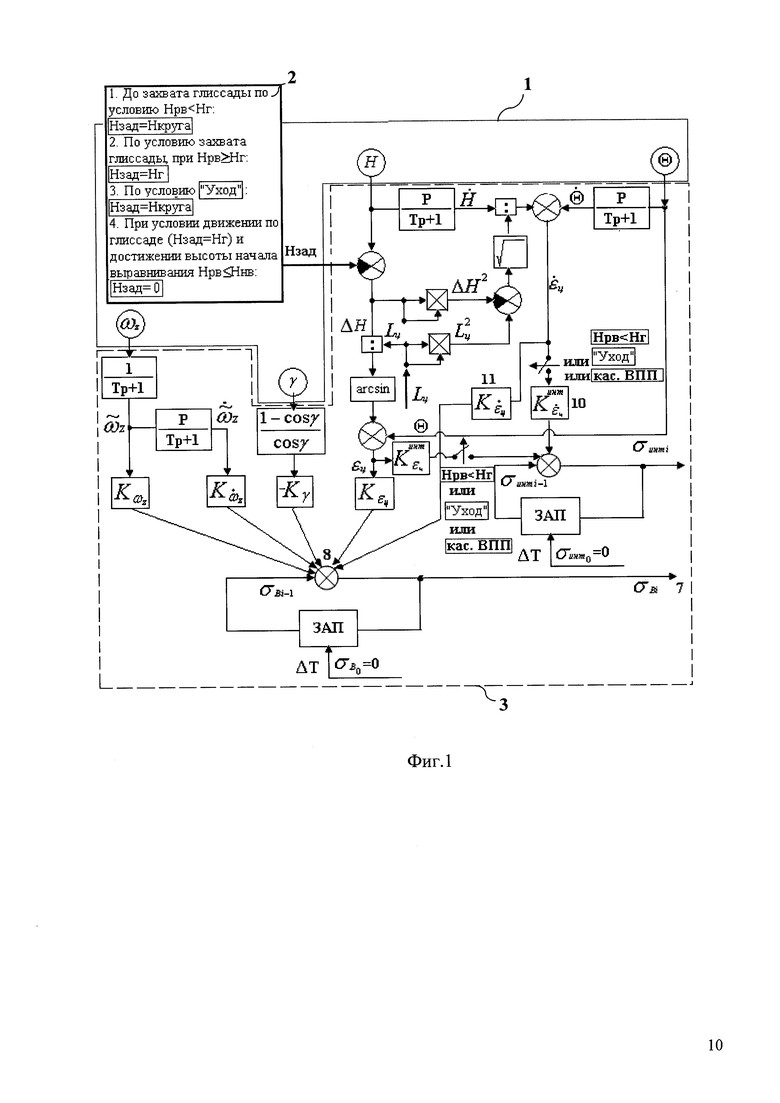
Возможность реализации заявленного способа управления может быть обеспечена посредством автоматической системы управления полетом, сущность которой представлена на фиг. 1.
Автоматическая система управления полетом, реализующая заявленный способ, состоит из системы измерения параметров полета 1, блока формирования заданной высоты полета 2 и блока формирования основного управляющего сигнала на привод руля высоты и привод секций интерцепторов 3.
Система измерения параметров полета 1 состоит из следующих датчиков:
- датчика измерения угловой скорости тангажа (ωZ);
- датчика измерения угла крена (γ);
- датчика измерения высоты полета Н (барометрической и радиовысоты);
- датчика измерения угла наклона траектории (Θ).
В блоке формирования управляющего сигнала на привод руля высоты и привод секций интерцепторов 3 при формировании управляющего сигнала на привод руля высоты реализуется прием и обработка входной информации с датчиков системы измерения параметров полета 1 и пульта системы автоматического управления (САУ), с последующим формированием управляющего сигнала (σв i), представленного управляющим сигналом предыдущего шага управляющего воздействия (σв i-1), скорректированного суммарной реакцией на угол (εц) между вектором траекторной скорости самолета и заданным кратчайшим расстоянием до программно имитируемой «цели» и скорость его изменения ( ) с заданными коэффициентами усиления, демпфирующие составляющие и компенсацию влияния угла крена. Шаг управляющих воздействий (ΔT) определяется величиной дискретности бортового вычислителя САУ. При формировании управляющего сигнала на привод секций интерцепторов реализуется прием и обработка входной информации с датчиков системы измерения параметров полета 1 и пульта управления, с последующим формированием управляющего сигнала (σинт i), представленного управляющим сигналом предыдущего шага управляющего воздействия (σинт i-1), скорректированного суммарной реакцией на угол εц и скорость его изменения
) с заданными коэффициентами усиления, демпфирующие составляющие и компенсацию влияния угла крена. Шаг управляющих воздействий (ΔT) определяется величиной дискретности бортового вычислителя САУ. При формировании управляющего сигнала на привод секций интерцепторов реализуется прием и обработка входной информации с датчиков системы измерения параметров полета 1 и пульта управления, с последующим формированием управляющего сигнала (σинт i), представленного управляющим сигналом предыдущего шага управляющего воздействия (σинт i-1), скорректированного суммарной реакцией на угол εц и скорость его изменения  с заданными коэффициентами усиления. Шаг управляющих воздействий (AT) определяется величиной дискретности бортового вычислителя САУ.
с заданными коэффициентами усиления. Шаг управляющих воздействий (AT) определяется величиной дискретности бортового вычислителя САУ.
В блоке формирования заданной высоты полета 2 формируется логика подключения режимов управления и заданная высота движения самолета:
- до пересечения глиссады Нзад=Нкруга (подключение основного управляющего сигнала на руль высоты для стабилизации заданной и неизменной высоты круга), где Нзад - заданная высота полета, Нкруга - высота круга;
- по условию пересечения глиссады Нрв>Нг, где Нрв - высота центра масс самолета над поверхностью ВПП по показаниям радиовысотомера, а Нг - высота глиссады, заданная высота определяется вычисляемой высотой глиссады Нзад=Нг с подключением основного управляющего сигнала на руль высоты и вспомогательного сигнала на секции интерцепторов для стабилизации заданной вычисляемой высоты глиссады;
- с момента захвата глиссады возможна реализация ухода на второй круг по условиям «Уход» (нажата кнопка старта режима ухода на второй круг) и перевода режима работы двигателей на взлетный режим. В этом случае заданная высота полета принимается равной заданной на пульте управления высоте эшелона (минимальная высота эшелона принимается равной высоте круга Нзад=Нкруга),
- при движении по глиссаде и достижении высоты начала выравнивания при условии Нрв≤Ннв (для каждого типа самолета высота начала выравнивания задается эмпирическим путем), где Ннв - высота начала выравнивания, заданная высота принимается равной нулю для реализации основным и вспомогательным управляющим сигналом траектории выравнивания до касания ВПП.
Система автоматического управления, реализующая заявленный способ, работает следующим образом:
Система измерения параметров полета принимает сигналы от датчиков (ωZ), (γ), (Н), (Θ);
1. В блоке формирования управляющих сигналов на привод руля высоты и привод интерцепторов сигнал с датчика угловой скорости тангажа (ωZ) предварительно фильтруется аналоговым фильтром. Аналоговая фильтрация позволяет избежать "сдвига" частот: преобразования высокочастотных входных колебаний с частотами, превосходящими частоту работы вычислителя, в низкочастотные выходные колебания. Величина постоянной времени фильтра выбирается исходя из условий обеспечения заданных характеристик устойчивости;
2. Фильтрованный сигнал с датчика угловой скорости тангажа  с одной стороны усиливается коэффициентом усиления
с одной стороны усиливается коэффициентом усиления  и подается на сумматор, с другой стороны пропускается через изодромное звено для получения производной
и подается на сумматор, с другой стороны пропускается через изодромное звено для получения производной  , которая после усиления коэффициентом
, которая после усиления коэффициентом  также подается на сумматор;
также подается на сумматор;
3. Сигнал с датчика угла крена (γ) формирует сигнал компенсации влияния угла крена на точность стабилизации заданной высоты полета  , который после усиления коэффициентом - Kγ подается на сумматор;
, который после усиления коэффициентом - Kγ подается на сумматор;
4. Для формирования сигналов  и
и  используются сигналы с датчиков (Н), (Θ), заданные с пульта управления САУ сигналы заданной высоты полета (Нзад) и заданного расстояния до программно имитируемой «цели» (Lц). Возможность изменения Lц позволяет реализовать функцию адаптации управляющих сигналов на руль высоты и интерцепторы к фактическим условиям полета. На величину заданной Lц устанавливается пультовое ограничение по результатам запаса устойчивости формируемых законов управления и условия
используются сигналы с датчиков (Н), (Θ), заданные с пульта управления САУ сигналы заданной высоты полета (Нзад) и заданного расстояния до программно имитируемой «цели» (Lц). Возможность изменения Lц позволяет реализовать функцию адаптации управляющих сигналов на руль высоты и интерцепторы к фактическим условиям полета. На величину заданной Lц устанавливается пультовое ограничение по результатам запаса устойчивости формируемых законов управления и условия  , где: Δ=H-Нзад. Для получения производных
, где: Δ=H-Нзад. Для получения производных  и
и  сигналы с датчиков (Н) и (Θ) пропускаются через соответствующие изодромные звенья.
сигналы с датчиков (Н) и (Θ) пропускаются через соответствующие изодромные звенья.
5. Сформированные сигналы εц и  после усиления соответствующими коэффициентами усиления
после усиления соответствующими коэффициентами усиления  и
и  подаются на соответствующие сумматоры для формирования основного управляющего сигнала на привод руля высоты (σвi) и вспомогательного управляющего сигнала на привод интерцепторов (σинт i);
подаются на соответствующие сумматоры для формирования основного управляющего сигнала на привод руля высоты (σвi) и вспомогательного управляющего сигнала на привод интерцепторов (σинт i);
6. Для реализации форсированного дискретно-непрерывного управления на шаге дискретности вычислителя ΔT формируется циклическое переопределение управляющих сигналов (σвi) и (σинт i) с запоминанием значений предыдущего шага (σвi-1) и (σинт i-1). При первом подключении режима σвi-1=0, σинт i-1=0.
В предлагаемом способе управления продольным движением самолета на посадке управление траекторным движением в вертикальной плоскости реализовано по общему принципу для режимов стабилизации заданной высоты полета, захода на посадку и посадки с выполнением функций захвата и стабилизации глиссады, выравнивания и, при необходимости, ухода на второй круг. Многорежимное управление выполняется рулем высоты и интерцепторами по общему принципу: наведение вектора траекторной скорости на воображаемую точку («цель»), которая движется на заданном удалении от центра масс самолета (Lц) на заданной высоте. Основное управление реализуется с помощью руля высоты. На режимах захода на посадку и посадки (захват и стабилизация глиссады, выравнивание) к основному управляющему сигналу на руль высоты добавляется вспомогательный сигнал на секции интерцепторов в режиме непосредственного управления подъемной силой. Вспомогательное управление интерцепторами подключается один раз на посадке в процессе захвата глиссады при условии нахождения самолета выше глиссады (ΔНг≥0) и используется на выравнивании (с высоты начала выравнивания до касания ВПП). Наведение на «цель» (движение по заданной траектории) обеспечивается минимизацией угла (εц) между вектором траекторной скорости ( ) и заданным кратчайшим расстоянием (Lц) до «цели» (см. фиг. 2).
) и заданным кратчайшим расстоянием (Lц) до «цели» (см. фиг. 2).
По отношению к вектору траекторной скорости ( ) величина εц определяется заданным расстоянием до «цели» (Lц):
) величина εц определяется заданным расстоянием до «цели» (Lц):
- с увеличением расстояния до «цели» εц уменьшается,
- с уменьшением расстояния до «цели» εц увеличивается.
Очевидно, что при изменении Lц и использовании в законе управления рулем высоты реакцию на εц можно изменять строгость управления:
- с увеличением расстояния до «цели» управление становится менее строгое (уменьшается весовой вклад в реакции на εц в законе управления рулем высоты),
- с уменьшением расстояния до «цели» управление становится более строгое (увеличивается весовой вклад в реакции на εц в законе управления рулем высоты).
Изменение расстояния до «цели» позволяет адаптироваться к условиям полета и решать оптимизационные задачи. В законе управления рулем высоты кроме реакции на εц учитывается демпфирование (реакция на  , ωz,
, ωz,  с заданными коэффициентами усиления) и компенсация влияния угла крена
с заданными коэффициентами усиления) и компенсация влияния угла крена  :
:

где:
σBi - управляющий сигнал на привод руля высоты, сформированный на i-м (текущем) шаге управляющего воздействия;
σBi-1 - управляющий сигнал на привод руля высоты, сформированный на предыдущем i-1-м шаге управляющего воздействия;
 - коэффициент усиления реакции на εц;
- коэффициент усиления реакции на εц;
 - коэффициент усиления реакции на
- коэффициент усиления реакции на  ;
;
 - коэффициент усиления реакции на ωz;
- коэффициент усиления реакции на ωz;
 - коэффициент усиления реакции на
- коэффициент усиления реакции на  .
.
В условиях добавления вспомогательного сигнала в законе управления интерцепторами реализуется принцип непосредственного управления подъемной силой крыла самолета по интегральному закону, включающему реакции на εц и 

где:
σинт i - управляющий сигнал на привод секций интерцепторов, сформированный на i-м (текущем) шаге управляющего воздействия;
σинт i-1 - управляющий сигнал на привод секций интерцепторов, сформированный на i-1-м (предыдущем) шаге управляющего воздействия;
 - коэффициент усиления реакции на εц;
- коэффициент усиления реакции на εц;
 - коэффициент усиления реакции на
- коэффициент усиления реакции на .
.
Переход к движению по глиссаде выполняется по условию Н≥Нг. Движение по глиссаде формируется по траектории движения «цели», определяемой высотой глиссады

где:
Нг - высота глиссады;
Кдк - коэффициент динамической коррекции.
При известном угле наклона глиссады (ΘГ) высота глиссады определяется по известной дальности (L) до глиссадного радиомаяка

При этом отклонение от глиссады по высоте определяется величиной

где:
Нрв - высота центра масс самолета над поверхностью ВПП по показаниям радиовысотомера;
Нц - высота «цели» над поверхностью ВПП.
Так как движение по глиссаде реализуется по критерию минимизации отклонения от заданной постоянно меняющейся высоты глиссады, то заданное значение высоты «цели» (в данном случае - высоты глиссады) корректируется коэффициентом динамической коррекции Кдк(Vзп), который определяется в зависимости от скорости захода на посадку (Vзп) и обеспечивает минимальное отклонение от глиссады по высоте в установившемся режиме полета.
Для реализации движения самолета в равносигнальной зоне глиссадного радиомаяка, отклонение от глиссады по высоте дополнительно контролируется и, при необходимости, корректируется по сигналам глиссадного радиомаяка и радиовысотомера

где:
ξ - сигнал глиссадного радиомаяка [mV],
Нрв - высота по радиовысотомеру [м].
При достижении высоты начала выравнивания (по радиовысотомеру) заданная высота «цели» принимается равной нулю, т.е. «цель» начинает двигаться по оси ВПП на высоте 0 м над уровнем ВПП (Нц=0 м) на постоянном заданном удалении (Lц) от центра масс самолета. На этапе выравнивания расстояние до «цели» оказывает влияние на точку приземления (длину воздушного участка от начала выравнивания до касания ВПП): с увеличением Lц длина воздушного участка увеличивается, что позволяет минимизировать нормальную перегрузку касания ВПП.
На посадке реализуются следующие подэтапы:
1. подэтап стабилизации заданной высоты круга,
2. подэтап захвата и стабилизации глиссады по условию Нрв≥Нг,
3. подэтап выравнивания по условию достижения высоты Ннв начала выравнивания (Нрв≤Ннв).
Отключение подэтапа захвата и стабилизации глиссады выполняется автоматически по условию ухода на второй круг или по условию достижения высоты начала выравнивания. Уход на второй круг включается по условию перевода РУД во взлетное положение. При этом интерцепторы полностью убираются, а управление рулем высоты переключается на удержание заданной высоты круга в процессе ухода на 2-й круг. Подэтап выравнивания отключается по условию касания ВПП основными опорами шасси (срабатывание соответствующих концевых выключателей, по сигналу которых все секции интерцепторов и воздушные тормоза выпускаются в режиме торможения, а управление рулем высоты переключается на опускание носового колеса).
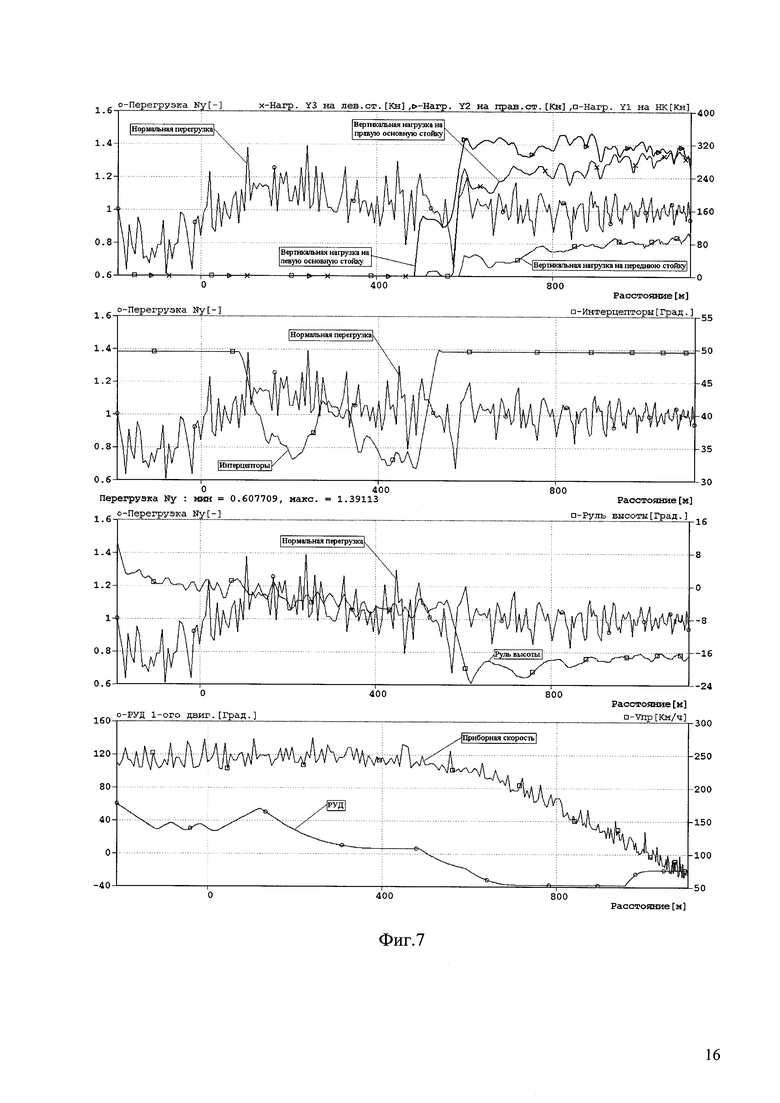
Некоторые результаты математического моделирования посадки по способу погони за «целью», движущейся на высоте круга, на высоте глиссады и по оси ВПП на высоте 0 м приведены на фиг. 3-7. На фиг. 4 приведены фрагменты посадки на участках захвата и стабилизации глиссады (а) и выравнивании (б).
Условия подключения и функционирования интерцепторов приводят к их полному выпуску в момент захвата глиссады. При достижении высоты начала выравнивания интерцепторы прибираются, увеличивая подъемную силу, что позволяет обеспечить идеальные условия выравнивания траектории перед касанием ВПП. Для демонстрации эффективности предлагаемого способа управления на фиг. 5-7 приведены результаты математического моделирования посадки самолета Ту-204СМ в условиях кольцевого вихря, расположенного перед входным торцом ВПП (фиг. 5) и в условиях атмосферной турбулентности (фиг. 6, 7). В канале тяги решаются задачи удержания заданной приборной скорости, дросселирования тяги до малого газа в процессе выравнивания траектории, включение малого и максимального реверса тяги на пробеге.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА | 2015 |
|
RU2588174C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2017 |
|
RU2667411C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2018 |
|
RU2684961C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |





Изобретение относится к способу управления продольным движением самолета на посадке. Для управления продольным движением самолета на посадке формируют основной управляющий сигнал на привод руля высоты, формируют и адаптивно отслеживают заданную высоту полета путем определения и минимизации угла между вектором траекторной скорости полета и направлением на программно имитируемую цель, движущуюся по заданной траектории на заданном расстоянии от центра масс самолета, формируют вспомогательный сигнал на привод секций интерцепторов на этапах захвата и стабилизации глиссады, выравнивания с реализацией ухода на второй круг при необходимости. 7 ил.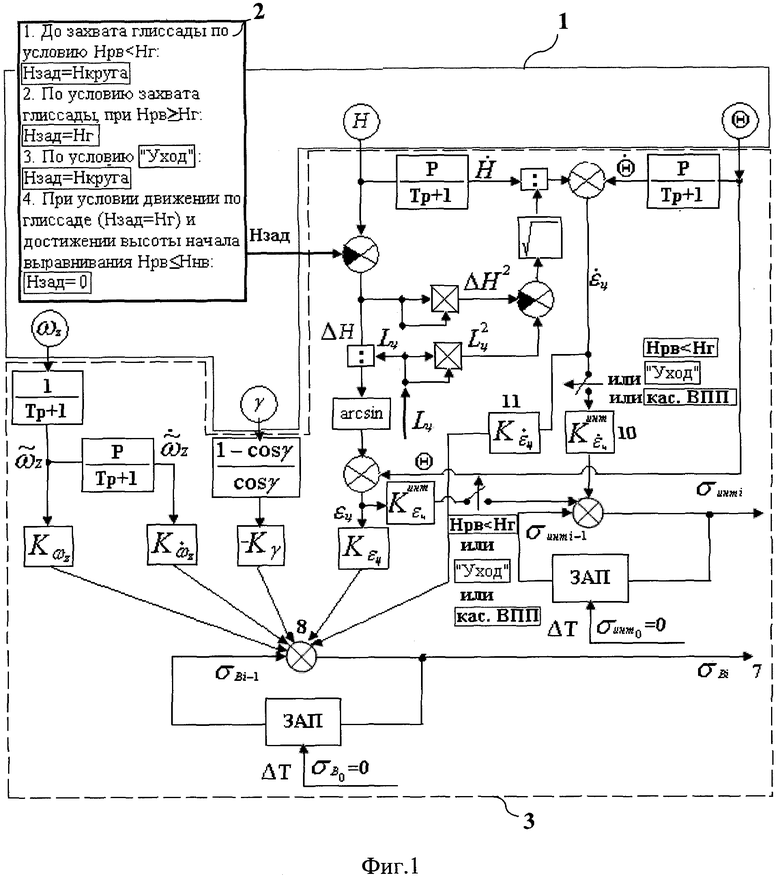
Способ управления продольным движением самолета на посадке, основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются основной управляющий сигнал на привод руля высоты и вспомогательный управляющий сигнал на привод секций интерцепторов, величина которых оказывает влияние на строгость автоматического управления самолетом и изменяется в зависимости от величины угла между вектором траекторией скорости самолета и направлением на программно имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета, а также скоростью изменения упомянутого угла, отличающийся тем, что основной и вспомогательный управляющие сигналы на руль высоты и секции интерцепторов реализованы по общему принципу дискретно-непрерывного, форсированного управления, основанного на формировании и адаптивном отслеживании заданной высоты полета самолета посредством определения и минимизации угла между вектором траекторной скорости полета самолета и направлением на программно имитируемую «цель», движущуюся по заданной траектории на заданном расстоянии от центра масс самолета с подключением вспомогательного сигнала на секции интерцепторов для активной коррекции траектории на этапах захвата и стабилизации глиссады, выравнивания с реализацией, при необходимости, возможности ухода на второй круг.
| КУЗНЕЦОВ А.Г., НАВИГАЦИЯ И УПРАВЛЕНИЕ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ, ТРУДЫ МИЭА, ВЫПУСК 6, М., 2013 | |||
| Способ управления движением самолета при посадке | 1989 |
|
SU1819805A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 20040155146 A1, 12.08.2004. | |||

