Изобретение относится к области авиации и может быть использовано в пилотажно-навигационном оборудовании летательных аппаратов.
В условиях глобального изменения климата, повышенного интереса к Арктике и Антарктике актуальной задачей является повышение эффективности эксплуатации и безопасности полетов воздушных судов транспортной категории на этапах разбега при взлете и пробега при посадке с грунта, льда или взлетно-посадочной полосы (ВПП) различного состояния в условиях ограниченной дальности видимости, значительных боковых возмущений, вызванных ветровыми воздействиями и/или отказом критического двигателя (при наличии у самолета двух и более двигателей).
Вероятность бокового выкатывания существенно повышается при необходимости выполнения прерванного взлета с отказом критического двигателя до скорости принятия решения или пробега с отказавшим двигателем в условиях существенных боковых возмущений, ограниченной дальности видимости и низких коэффициентах сцепления. Выкатывание возможно по двум основным причинам:
- потеря возможности управлять самолетом по причине полного расхода руля направления при невозможности управлять носовыми колесами (полная потеря управляемости в боковом движении);
- ошибки пилота, приводящие к боковому смещению самолета относительно заданного направления (оси ВПП) более допустимой величины при наличии запаса управляемости в боковом движении.
Из существующего уровня техники известен способ автоматического формирования вспомогательных управляющих сигналов самолета на пробеге (Патент РФ №2684961, МПК В64С 13/00, опубл. 16.04.2019), основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, в которой формируются вспомогательный управляющий сигнал на привод секций интерцепторов и тормозов основных стоек шасси, характеризующийся тем, что сначала формируют управляющий сигнал с концевого выключателя обжатия передней амортизационной стойки шасси на реле времени, которое срабатывает и отключает управление поворотом носовых колес передней амортизационной стойки шасси и переводит их в режим свободной ориентации, а затем, по истечении 1,5 с, повторно срабатывает реле времени и подключает управление поворотом носовых колес передней амортизационной стойки шасси и переводит их в штатный режим управления, при этом управляющий сигнал определяют упомянутой вычислительной системой автоматического управления полетом по величине сигнала на руль направления через коэффициент

после чего осуществляют упомянутое формирование вспомогательных управляющих сигналов на пробеге самолета, поступающих с упомянутых датчиков системы измерения параметров полета в вычислительную систему автоматического управления полетом, путем воздействия на автоматическое дифференциальное управления тормозами колес и упомянутых приводов секций интерцепторов по признаку обжатия передней амортизационной стойки шасси при получении сигнала с концевого выключателя обжатия передней амортизационной стойки шасси или от скорости раскрутки по крайней мере одного тормозного колеса левой или правой амортизационных стоек шасси больше или равной 37 км/ч, причем упомянутое автоматическое дифференциальное управление тормозами колес левой и правой амортизационных стоек шасси осуществляют путем имитации обжатия, соответственно левой и правой педалей тормоза, при получении сигнала с соответствующего концевого выключателя обжатия левой амортизационной стойки шасси и правой амортизационной стойки шасси, где состояние 0 и 1 - для левой и правой педалей тормоза, при этом состояние 0 - для левой и правой амортизационных стоек шасси педали тормоза не обжаты и колеса полностью расторможены, а состояние 1 - для левой и правой амортизационных стоек шасси педали тормоза полностью обжаты и колеса полностью заторможены, причем торможение колес для левой и правой амортизационных стоек шасси выполняют путем линейного увеличения тормозного момента до максимальной величины за 2 с при полностью заторможенных колесах левой и правой амортизационных стоек шасси, а затем осуществляют линейное уменьшение тормозного момента до нуля за 1 с при полностью расторможенных колесах, при этом на пробеге контролируют степень заторможенности колес, для чего определяют фактическое состояние взлетно-посадочной полосы и величину посадочной дистанции, а также контролируют направление бокового смещения самолета относительно оси взлетно-посадочной полосы и угол отклонения носовых колес, причем формирование сигналов на приводы секций интерцепторов осуществляют по состоянию имитации обжатия левой или правой педалей тормоза, при этом вначале осуществляют по состоянию  для левой педали тормоза, колеса левой амортизационной стойки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 с, затем формирование сигналов на приводы секций интерцепторов осуществляют по состоянию
для левой педали тормоза, колеса левой амортизационной стойки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 с, затем формирование сигналов на приводы секций интерцепторов осуществляют по состоянию  для правой педали тормоза, колеса правой амортизационной стойки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 с, после чего осуществляют формирование сигналов на приводы секций интерцепторов по состоянию
для правой педали тормоза, колеса правой амортизационной стойки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 с, после чего осуществляют формирование сигналов на приводы секций интерцепторов по состоянию  для левой педали тормоза, колеса левой амортизационной стойки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 с, затем осуществляют формирование сигналов на приводы секций интерцепторов по состоянию
для левой педали тормоза, колеса левой амортизационной стойки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 с, затем осуществляют формирование сигналов на приводы секций интерцепторов по состоянию  для правой педали тормоза, колеса правой амортизационной стойки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 с.
для правой педали тормоза, колеса правой амортизационной стойки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 с.
Также из уровня техники известен способ автоматического формирования вспомогательных управляющих сигналов самолета на пробеге (Патент РФ №2667411, МПК В64С 13/00, опубл. 19.09.2018), основанный на использовании управляющих сигналов, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, в которой формируются вспомогательные управляющие сигналы на интерцепторы и другие элементы системы управления самолетом, величина которых оказывает влияние на строгость автоматического управления самолетом, отличающийся тем, что вначале упомянутое формирование вспомогательных управляющих сигналов на пробеге самолета, поступающих с датчиков системы измерения параметров полета и вычислительную систему автоматического управления полетом, осуществляют путем воздействия на автоматическое дифференциальное управление тормозами колес и упомянутыми секциями интерцепторов по признаку обжатия передней стойки шасси при получении сигнала с соответствующего концевого выключателя или в зависимости от скорости раскрутки тормозных колес каждой основной опоры больше или равной 37 км/ч, затем упомянутое автоматическое дифференциальное управление тормозами колес основных стоек шасси осуществляют путем имитации обжатия левой и правой педалей тормоза, где состояние 0 и 1 - для левой и/или правой педали тормоза, причем состояние 0 - педали тормоза не обжаты, а колеса полностью расторможены, а состояние 1 - педали тормоза полностью обжаты, а колеса полностью заторможены, при этом торможение колес выполняют путем линейного увеличения тормозного момента до максимальной величины за 2 сек при полностью заторможенных колесах и осуществляют линейное уменьшение тормозного момента до нуля за 1 сек при полностью расторможенных колесах, причем при пробеге контролируют степень заторможенности колес, для чего определяют фактическое состояние взлетно-посадочной полосы (ВПП) и величину посадочной дистанции, а также контролируют направление бокового смещения самолета относительно оси ВПП и угол отклонения носовых колес, причем формирование сигналов на секции интерцепторов осуществляют по состоянию имитации обжатия левой и/или правой педали тормоза, при этом вначале осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле, причем полную уборку секций интерцепторов выполняют за 1 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние
для правой педали тормоза, колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле, при этом полную уборку секций интерцепторов выполняют за 1 сек, после чего осуществляют, где состояние  для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние
для левой педали тормоза, колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле, при этом полный выпуск секций интерцепторов выполняют за 2 сек, затем осуществляют, где состояние  для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек.
для правой педали тормоза, колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле, причем полный выпуск секций интерцепторов выполняют за 2 сек.
Известные способы имеют следующие недостатки:
1. Отсутствует логика формирования вспомогательных управляющих сигналов при разбеге самолета в случае принятия решения пилотом о прерванном взлете.
2. Недостаточная эффективность при использовании секций интерцепторов на этапе повторного торможения.
Задачей изобретения является повышение качества управления самолетом на этапе разбега «прерванный взлет» и этапе посадки «пробег» путем формирования вспомогательных управляющих сигналов на привод тормозов основных амортизационных стоек шасси, привод управления поворотом носовых колес передней амортизационной стойки шасси и привод секций интерцепторов полукрыльев.
Техническим результатом является повышение эффективности управляющих воздействий на элементы системы управления самолетом на разбеге при необходимости выполнения прерванного взлета и посадке при выпонении пробега в условиях потери управляемости или угрозе бокового выкатывания самолета за пределы взлетно-посадочной полосы.
Технический результат достигается тем, что предложенный способ автоматического формирования вспомогательных сигналов на наземном участке движения самолета, основанный на использовании управляющих сигналов, поступающих с системы датчиков в бортовой вычислитель, в котором формируются вспомогательные управляющие сигналы на привод тормозов основных амортизационных стоек шасси, привод управления поворотом носовых колес передней амортизационной стойки шасси, а также привод секций интерцепторов полукрыльев, характеризуется тем, что формирование упомянутых вспомогательных управляющих сигналов на пробеге и разбеге осуществляют поэтапно, при этом формирование вспомогательных управляющих сигналов на пробеге на первом этапе осуществляют при условии обжатия амортизатора передней стойки шасси и положения РУД не более земного малого газа, причем автоматическое дифференциальное управление тормозами колес основных амортизационных стоек шасси осуществляют посредством имитации обжатия левой и правой педалей тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес основных амортизационных стоек шасси за установленный системой временной отрезок, формирования сигнала на полный выпуск секций интерцепторов левого и правого полукрыльев за установленный системой временной отрезок, подключения носовых колес передней амортизационной стойки шасси в контур управления совместно с рулем направления с предварительным переводом носовых колес в режим свободной ориентации в течение установленного системой интервала времени с установленным системой диапазоном максимальных углов отклонения носовых колес на пробеге; формирование вспомогательных управляющих сигналов на пробеге на втором этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного уменьшения тормозного момента до максимальной величины расторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок и формирования сигнала на полную уборку секций интерцепторов левого/правого полукрыла за установленный системой временной отрезок, при этом упомянутые управляющие сигналы формируют по условию бокового смещения самолета влево/вправо относительно оси ВПП более установленной системой допустимой величины или при условии достижения или превышения установленного системой максимального допустимого угла отклонения носовых колес вправо/влево с учетом того, что носовые колеса находятся на этом ограничении не менее установленного системой временного отрезка; формирование вспомогательного управляющего сигнала на пробеге на третьем этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок, при этом упомянутый управляющий сигнал формируют при условии снятия носовых колес с ограничения по максимальному допустимому углу отклонения носовых колес и не достижении его в течение установленного системой временного отрезка при одновременном уменьшении бокового смещения самолета от оси ВПП до установленного системой допустимого значения; на первом этапе при разбеге формируют вспомогательный управляющий сигнал на включение управления поворотом носовых колес передней амортизационной стойки шасси при условии обжатия амортизаторов всех стоек шасси и взлетного положения РУД; на втором этапе при разбеге формируют управляющие сигналы на автоматическое дифференциальное управление тормозами колес основных амортизационных стоек шасси посредством имитации обжатия левой и правой педалей тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес основных амортизационных стоек шасси за установленный системой временной отрезок, а также одновременно формируют управляющий сигнал на полный выпуск секций интерцепторов левого и правого полукрыльев за установленный системой временной отрезок при условии перевода РУД в положение не более земного малого газа; формирование вспомогательных управляющих сигналов на разбеге на третьем этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного уменьшения тормозного момента до максимальной величины расторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок и формирования сигнала на полную уборку секций интерцепторов левого/правого полукрыла за установленный системой временной отрезок, при этом упомянутые управляющие сигналы формируют по условию бокового смещения самолета влево/вправо относительно оси ВПП более установленной системой допустимой величины или при условии достижения или превышения установленного системой максимального допустимого угла отклонения носовых колес вправо/влево с учетом того, что носовые колеса находятся на этом ограничении не менее установленного системой временного отрезка; формирование вспомогательного управляющего сигнала на разбеге на четвертом этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок, при этом упомянутый управляющий сигнал формируют при условии снятия носовых колес с ограничения по максимальному допустимому углу отклонения носовых колес и не достижении его в течение установленного системой временного отрезка при одновременном уменьшении бокового смещения самолета от оси ВПП до установленного системой допустимого значения.
Предложенный способ автоматического управления наземным движением самолета, реализуемый системой GRAS (Ground Roll Assistance System), представляющей собой систему автоматического дифференциального управления приводом тормозов основных амортизационных стоек шасси, приводом управления поворотом носовых колес передней амортизационной стойки шасси, а также приводом секций интерцепторов полукрыльев, позволяет устранить основные причины бокового выкатывания самолета за счет реализации логики формирования вспомогательных управляющих сигналов бортовым вычислителем (автоматической системой штурвального управления АСШУ) на границе потери управляемости самолета при выполнении прерванного взлета или пробега при смещении самолета относительно заданного направления (оси ВПП) более допустимой величины. В качестве вспомогательных управляющих сигналов рассматриваются сигналы бортового вычислителя на дифференциальное управление секциями интерцепторов, тормозами колес основных опор шасси и поворотом носовых колес передней стойки шасси.
Включение режима автоматического дифференциального управления выполняется автоматически по признаку обжатия амортизатора передней стойки шасси (сигнал с соответствующего концевого выключателя) при условии перевода рычагов управления двигателями (РУД) в положение земного малого газа или реверса.
Автоматическое управление тормозами колес основных стоек шасси осуществляется путем имитации обжатия левой и правой педали тормоза (состояние 0 и 1 для левой и/или правой педали тормоза):
- состояние 0 - педаль тормоза не обжата (колеса соответствующей тележки полностью расторможены);
- состояние 1 - педаль тормоза полностью обжата (колеса соответствующей тележки полностью заторможены).
Управление торможением колес выполняется, путем увеличения тормозного момента по линейному закону от нуля до максимальной величины за 1 сек, для полного торможения колес, и линейное уменьшение тормозного момента от максимальной величины до нуля за 1 сек, для полного растормаживания колес.
Совместно с управлением тормозами колес для повышения эффективности управляющих воздействий при движении по ВПП (или грунту) в условиях низких коэффициентов сцепления, сильных боковых возмущений и возможных ошибок управления, рассматривается формирование сигналов на секции интерцепторов по состоянию имитации обжатия левой и/или правой педали тормоза (величине тормозного момента), где:
- состояние  для левой педали тормоза- колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле (время на полную уборку интерцепторов и полное растормаживание колес 1 сек);
для левой педали тормоза- колеса левой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на левом полукрыле (время на полную уборку интерцепторов и полное растормаживание колес 1 сек);
- состояние  для правой педали тормоза- колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле (время на полную уборку интерцепторов и полное растормаживание колес 1 сек);
для правой педали тормоза- колеса правой тележки шасси полностью расторможены и полностью убраны секции интерцепторов на правом полукрыле (время на полную уборку интерцепторов и полное растормаживание колес 1 сек);
- состояние  для левой педали тормоза- колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле (время на полный выпуск интерцепторов и максимальное торможение колес 1 сек);
для левой педали тормоза- колеса левой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на левом полукрыле (время на полный выпуск интерцепторов и максимальное торможение колес 1 сек);
- состояние для правой педали тормоза- колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле (время на полный выпуск интерцепторов и максимальное торможение колес 1 сек).
для правой педали тормоза- колеса правой тележки шасси полностью заторможены и полностью выпущены секции интерцепторов на правом полукрыле (время на полный выпуск интерцепторов и максимальное торможение колес 1 сек).
Логика автоматического дифференциального управления на этапе разбега «прерванный взлет» и пробеге поясняется на Фиг. 1 и сводится к выполнению следующих действий:
1. На этапе предполетной подготовки в вычислительную систему самолетовождения (ВСС) заносятся данные по курсу взлета и посадки.
2. Система автоматического дифференциального управления армируется для взлета (подготавливается к работе с формированием соответствующего признака и выбором от ВСС куса ВПП для взлета) сразу после перевода РУД во взлетное положение (с датчика положения РУД принято положение, установленное для взлета) при условии обжатия всех стоек шасси (приняты сигналы обжатия амортизаторов с соответствующих датчиков всех стоек шасси). В этом случае носовые колеса подключаются в контур управления совместно с рулем направления без задержки на свободную ориентацию, с установленным для разбега диапазоном максимальных углов отклонения 
3. Система автоматического дифференциального управления армируется для посадки (подготавливается к работе с формированием соответствующего признака и выбором от ВСС курса ВПП для посадки) сразу после перевода РУД в положение земного малого газа (с датчика положения РУД принято положение, установленное для земного малого газа) при условии отсутствия обжатия амортизаторов всех стоек шасси (нет сигналов с датчиков обжатия амортизаторов всех стоек шасси). В этом случае, сразу после получения сигнала касания ВПП носовыми колесами (принят сигнал с соответствующего датчика), носовые колеса подключаются в контур управления совместно с рулем направления с предварительным переводом в режим свободной ориентации в течение интервала времени 0,8 сек с установленным для пробега диапазоном максимальных углов отклонения 
4. При наличии двух условий: получен признак обжатия амортизатора передней стойки шасси (принят сигнал с соответствующего концевого выключателя) и получен признак с датчика положения РУД (РУД в положении не более земного малого газа), система автоматического дифференциального управления формирует управляющий сигнал на полное торможение колес левой и правой стойки шасси и полный выпуск всех секций интерцепторов: изменение  по линейному закону от 0 до 1. Интервал времени достижения максимального тормозного момента и максимального угла выпуска всех секций интерцепторов 1 секунда.
по линейному закону от 0 до 1. Интервал времени достижения максимального тормозного момента и максимального угла выпуска всех секций интерцепторов 1 секунда.
5. В процессе торможения, система автоматического дифференциального управления по сигналам курсового радиомаяка и известному курсу взлета/посадки (принимается от ВСС) контролирует направление бокового смещения самолета относительно оси ВПП, направление (знак) и величину угла отклонения носовых колес. При условии достижения максимального допустимого угла отклонения носовых колес вправо  с учетом, что носовые колеса находятся на этом ограничении не менее 2 сек
с учетом, что носовые колеса находятся на этом ограничении не менее 2 сек  - предельное максимальное ограничение угла отклонения носовых колес, принятое для разбега или пробега) или имеет место смещение самолета от оси ВПП влево более допустимой величины (εK<-0,4° в течение 1 секунды), формируется сигнал на полное растормаживание колес левой стойки шасси (изменение коэффициента
- предельное максимальное ограничение угла отклонения носовых колес, принятое для разбега или пробега) или имеет место смещение самолета от оси ВПП влево более допустимой величины (εK<-0,4° в течение 1 секунды), формируется сигнал на полное растормаживание колес левой стойки шасси (изменение коэффициента  от 1 до 0 за 1 сек) и сигнал на полную уборку секций интерцепторов на левом полукрыле за 1 секунду. При условии полностью расторможенных колес левой стойки (при условии
от 1 до 0 за 1 сек) и сигнал на полную уборку секций интерцепторов на левом полукрыле за 1 секунду. При условии полностью расторможенных колес левой стойки (при условии  контролируются условия снятия носовых колес с ограничения (максимально допустимого угла отклонения носовых колес вправо). При условии снятия носовых колес с ограничения, т.е. в течение 2 сек выполняется условие
контролируются условия снятия носовых колес с ограничения (максимально допустимого угла отклонения носовых колес вправо). При условии снятия носовых колес с ограничения, т.е. в течение 2 сек выполняется условие  и уменьшении бокового смещения самолета от оси ВПП влево более чем в два раза (εК>-0,2° в течение 1 секунды), формируется сигнал на повторное полное торможение колес левой стойки шасси (изменение коэффициента
и уменьшении бокового смещения самолета от оси ВПП влево более чем в два раза (εК>-0,2° в течение 1 секунды), формируется сигнал на повторное полное торможение колес левой стойки шасси (изменение коэффициента  от 0 до 1 за 1 секунду) без повторного выпуска секций интерцепторов на левом полукрыле. При условии достижения максимального угла отклонения носовых колес влево
от 0 до 1 за 1 секунду) без повторного выпуска секций интерцепторов на левом полукрыле. При условии достижения максимального угла отклонения носовых колес влево  с учетом, что носовые колеса находится на этом ограничении не менее 2 сек
с учетом, что носовые колеса находится на этом ограничении не менее 2 сек  - предельное максимальное ограничение угла отклонения носовых колес, принятое для разбега или пробега) или имеет место смещение самолета от оси ВПП вправо более допустимой величины (εК>0,4° в течение 1 секунды), формируется сигнал на полное растормаживание колес правой стойки шасси (изменение коэффициента
- предельное максимальное ограничение угла отклонения носовых колес, принятое для разбега или пробега) или имеет место смещение самолета от оси ВПП вправо более допустимой величины (εК>0,4° в течение 1 секунды), формируется сигнал на полное растормаживание колес правой стойки шасси (изменение коэффициента  от 1 до 0 за 1 сек) и сигнал на полную уборку секций интерцепторов на правом полукрыле за 1 секунду. При условии полностью расторможенных колес правой стойки (при условии
от 1 до 0 за 1 сек) и сигнал на полную уборку секций интерцепторов на правом полукрыле за 1 секунду. При условии полностью расторможенных колес правой стойки (при условии  контролируются условия снятия носовых колес с ограничения (максимально допустимого угла отклонения носовых колес влево). При условии снятия носовых колес с ограничения, т.е. в течение 1 секунды выполняется условие
контролируются условия снятия носовых колес с ограничения (максимально допустимого угла отклонения носовых колес влево). При условии снятия носовых колес с ограничения, т.е. в течение 1 секунды выполняется условие 
 и уменьшении бокового смещения самолета от оси ВПП вправо более чем в два раза (τК<0,2° в течение 1 секунды), формируется сигнал на повторное полное торможение колес правой стойки шасси (изменение коэффициента
и уменьшении бокового смещения самолета от оси ВПП вправо более чем в два раза (τК<0,2° в течение 1 секунды), формируется сигнал на повторное полное торможение колес правой стойки шасси (изменение коэффициента  от 0 до 1 за 1 секунду) без повторного выпуска секций интерцепторов на правом полукрыле.
от 0 до 1 за 1 секунду) без повторного выпуска секций интерцепторов на правом полукрыле.
Повторного срабатывания сигнала на раздельное торможение колес левой или правой стойки шасси и соответствующее раздельное управление секциями интерцепторов не выполняется по причине возможного недопустимого увеличения длины пробега.
Пилот в любой момент имеет возможность отключить систему автоматического дифференциального управления нажатием двух педалей тормоза. При этом выполняется функция торможения всех тормозных колес и выпуск всех секций интерцепторов.
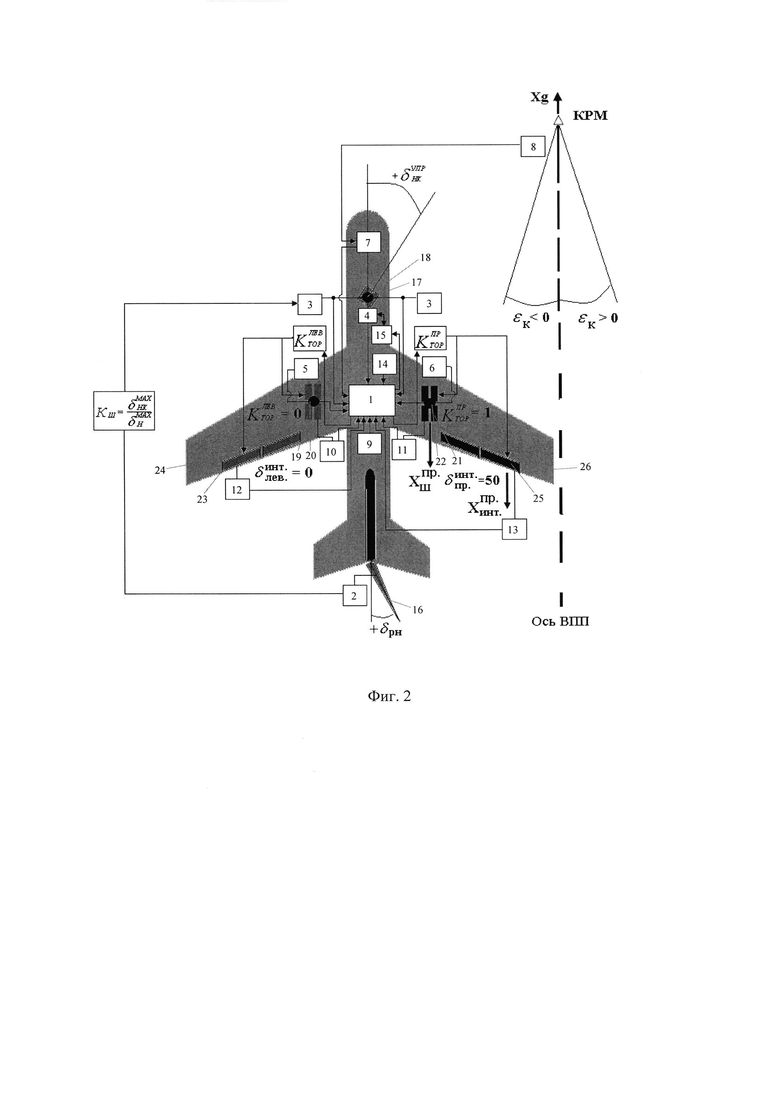
На Фиг. 2 показана блок-схема системы автоматического дифференциального управления, реализующей предложенный способ, где:
1 - бортовой вычислитель;
2 - датчик угла отклонения руля направления;
3 - датчик угла отклонения носовых колес;
4 - концевой выключатель обжатия передней амортизационной стойки шасси;
5 - концевой выключатель обжатия левой амортизационной стойки шасси;
6 - концевой выключатель обжатия правой амортизационной стойки шасси;
7 - бортовой приемник сигнала курсового радиомаяка;
8 - курсовой радиомаяк;
9 - датчик угла отклонения РУД;
10 - датчик состояния тормозов колес левой стойки шасси;
11 - датчик состояния тормозов колес правой стойки шасси;
12 - датчик угла отклонения левого интерцептора;
13 - датчик угла отклонения правого интерцептора;
14 - вычислительная система самолетовождения;
15 - таймер.
Система автоматического дифференциального управления согласно Фиг. 2 содержит автоматическую систему штурвального управления в виде бортового вычислителя 1, реализующего прием вспомогательных управляющих сигналов с датчика угла отклонения носовых колес 3, принимающего сигналы с датчика угла отклонения руля направления 2 и таймера 15, концевого выключателя обжатия передней амортизационной стойки 4, концевого выключателя обжатия левой амортизационной стойки 5, концевого выключателя обжатия правой амортизационной стойки 6, бортового приемника 7, принимающего сигналы от курсового радиомаяка 8, датчика угла отклонения РУД 9, датчика состояния тормозов колес левой стойки шасси 10, датчика состояния тормозов колес правой стойки шасси 11, датчика угла отклонения левого интерцептора 12, датчика угла отклонения правого интерцептора 13, ВСС 14. Кроме того система содержит бортовой приемник 7, принимающий сигналы от курсового радиомаяка 8. Элементы конструкции самолета, взаимодействующие с системой автоматического дифференциального управления, реализующей данный способ, содержат руль направления 16, носовые колеса 17 передней стойки шасси 18, колеса 19 левой стойки шасси 20, колеса 21 правой стойки шасси 22, секции интерцепторов 23, расположенные на левом полукрыле 24 и секции интерцепторов 25, расположенные на правом полукрыле 26.
Система автоматического дифференциального управления, реализующая заявленный способ, работает следующим образом.
Включение системы автоматического дифференциального управления на пробеге осуществляется пилотом посредством перевода РУД в положение земного малого газа (до момента касания самолетом ВПП), в результате чего сигнал с датчика угла отклонения РУД 9 поступает в бортовой вычислитель 1, активируя, таким образом систему автоматического дифференциального управления на пробеге (логику формирования автоматических вспомогательных сигналов). После касания носовых колес 17 передней амортизационной стойки шасси 18 поверхности ВВП формируется управляющий сигнал с концевого выключателя обжатия передней стойки шасси 4 на таймер 15, который при срабатывании отключает управление поворотом носовых колес 17 и переводит их в режим свободной ориентации, а затем, по истечении 0,8 секунды, повторно срабатывает и подключает управление поворотом носовых колес 12, переводя их в штатный режим управления, обеспечивая летчику возможность управления угловым положением носовых колес через руль направления 16. Таким образом основной управляющий сигнал от пилота поступает на руль направления 16, угол отклонения которого регистрируется датчиком 2 и посредством коэффициента Кш формируется угол отклонения носовых колес 17, который, в свою очередь, регистрируется датчиком угла отклонения носовых колес 3. Сигнал с концевого выключателя 4 также поступает в бортовой вычислитель 1, в который одновременно передаются сигналы от бортового приемника 7, принимающего сигнал от курсового радиомаяка 7 о боковом смещении самолета относительно оси ВПП и сигналы от датчика 3. Автоматическое дифференциальное управление тормозами колес 19 левой амортизационной стойки шасси 20 и колес 21 правой амортизационной стойки шасси 22, а также секциями интерцепторов 23 левого полукрыла 24 и секциями интерцепторов 25 правого полукрыла 26 на пробеге выполняется следующими этапами. По признаку обжатия передней амортизационной стойки шасси в бортовом вычислителе 1 формируются управляющие сигналы на полный выпуск секций интерцепторов 23, 25 (изменение  от 0 до 50), имитируется полное обжатие левой и правой педалей тормоза, в результате чего колеса 19 и 21 полностью затормаживаются (изменение коэффициентов
от 0 до 50), имитируется полное обжатие левой и правой педалей тормоза, в результате чего колеса 19 и 21 полностью затормаживаются (изменение коэффициентов  от 0 до 1). Интервал времени достижения максимального тормозного момента и максимального угла выпуска всех секций интерцепторов - не более 1 секунды. В процессе пробега контролируется направление бокового смещения самолета относительно оси взлетно-посадочной полосы (сигналы с бортового приемника 7), направление (знак) и величина угла отклонения носовых колес 17 (сигналы с датчика 3). При достижении максимального угла отклонения носовых колес 17 вправо
от 0 до 1). Интервал времени достижения максимального тормозного момента и максимального угла выпуска всех секций интерцепторов - не более 1 секунды. В процессе пробега контролируется направление бокового смещения самолета относительно оси взлетно-посадочной полосы (сигналы с бортового приемника 7), направление (знак) и величина угла отклонения носовых колес 17 (сигналы с датчика 3). При достижении максимального угла отклонения носовых колес 17 вправо 
 при условии, что они находятся на ограничении максимального угла отклонения не менее 2 секунд или имеет место смещение самолета от оси взлетно-посадочной полосы влево более допустимой величины (εК<-0,4°) в течение 1 секунды, в бортовом вычислителе 1 формируются управляющий сигнал на полное растормаживание колес 19 левой стойки шасси 20 и управляющий сигнал на полную уборку секций интерцепторов 23 на левом полукрыле 24 (изменение коэффициента
при условии, что они находятся на ограничении максимального угла отклонения не менее 2 секунд или имеет место смещение самолета от оси взлетно-посадочной полосы влево более допустимой величины (εК<-0,4°) в течение 1 секунды, в бортовом вычислителе 1 формируются управляющий сигнал на полное растормаживание колес 19 левой стойки шасси 20 и управляющий сигнал на полную уборку секций интерцепторов 23 на левом полукрыле 24 (изменение коэффициента  от 1 до 0 за 1 секунду). При условии полностью расторможенных колес левой стойки
от 1 до 0 за 1 секунду). При условии полностью расторможенных колес левой стойки и полностью убранных секций интерцепторов левого полукрыла (
и полностью убранных секций интерцепторов левого полукрыла ( посредством получения бортовым вычислителем 1 соответствующих сигналов от датчика состояния тормозов колес левой стойки шасси 10 и датчика угла отклонения левого интерцептора 12, контролируются условия снятия носовых колес с ограничения.
посредством получения бортовым вычислителем 1 соответствующих сигналов от датчика состояния тормозов колес левой стойки шасси 10 и датчика угла отклонения левого интерцептора 12, контролируются условия снятия носовых колес с ограничения.
При условии снятия носовых колес 17 с ограничения, т.е. выполнении условия 
 в течении 2 секунд и уменьшении бокового смещения самолета от оси ВПП влево более чем в два раза (εК>-0,2°) в течение 1 секунды, в бортовом вычислителе 1 формируется сигнал на повторное полное торможение колес 19 левой амортизационной стойки шасси 19 (изменение коэффициента
в течении 2 секунд и уменьшении бокового смещения самолета от оси ВПП влево более чем в два раза (εК>-0,2°) в течение 1 секунды, в бортовом вычислителе 1 формируется сигнал на повторное полное торможение колес 19 левой амортизационной стойки шасси 19 (изменение коэффициента  от 0 до 1 за 2 секунды) без повторного выпуска секций интерцепторов 23.
от 0 до 1 за 2 секунды) без повторного выпуска секций интерцепторов 23.
Логика формирования автоматических вспомогательных сигналов при пробеге на этапе смещения самолета от оси ВПП вправо осуществляется аналогичным образом, посредством автоматического дифференциального управления тормозами колес 21 правой амортизационной стойки шасси 22 и секциями интерцепторов 25 правого полукрыла 26.
Включение системы автоматического дифференциального управления на разбеге осуществляется пилотом посредством перевода РУД во взлетное положение при условии обжатия амортизаторов всех стоек шасси, т.е. формируются соответствующие управляющие сигналы с концевых выключателей 4, 5, 6 и датчика отклонения РУД 9 в бортовой вычислитель 1. При этом сигнал с концевого выключателя 4 также поступает на таймер 15, который при срабатывании включает управление поворотом носовых колес 17 и переводит их в штатный режим управления (без задержки на свободную ориентацию). В случае принятия пилотом решения о прерванном взлете при условии перевода РУД в положение земного малого газа или обратной тяги с датчика 9 поступает соответствующий сигнал в бортовой вычислитель 1, в котором формируются управляющие сигналы на полный выпуск секций интерцепторов 23, 25 и имитируется полное обжатие левой и правой педалей тормоза, в результате чего колеса 19 и 21 полностью затормаживаются.
Логика формирования автоматических вспомогательных сигналов при разбеге на этапе смещения самолета от оси ВПП вправо/влево осуществляется аналогично соответствующему этапу на пробеге.
Отключение логики формирования автоматических вспомогательных сигналов возможно на любом участке пробега или разбега путем нажатия пилотом педалей тормоза. В этом случае выполняется симметричное торможение колес и симметричный выпуск всех секций интерцепторов в режиме торможения.
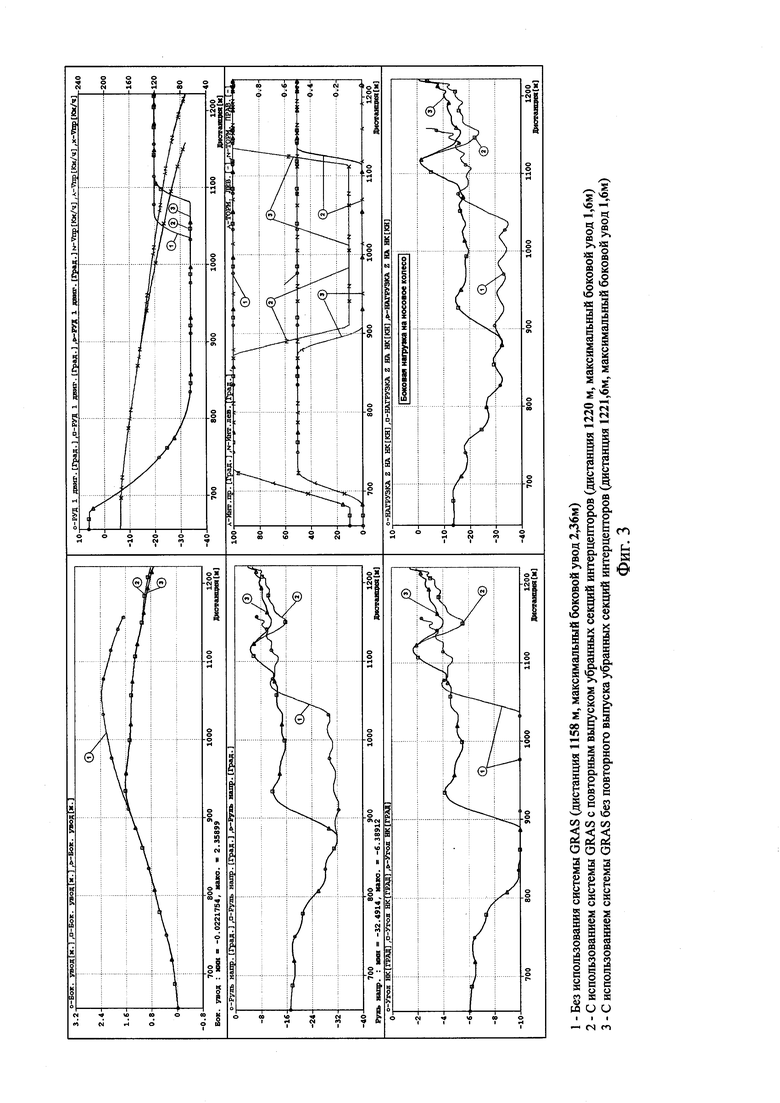
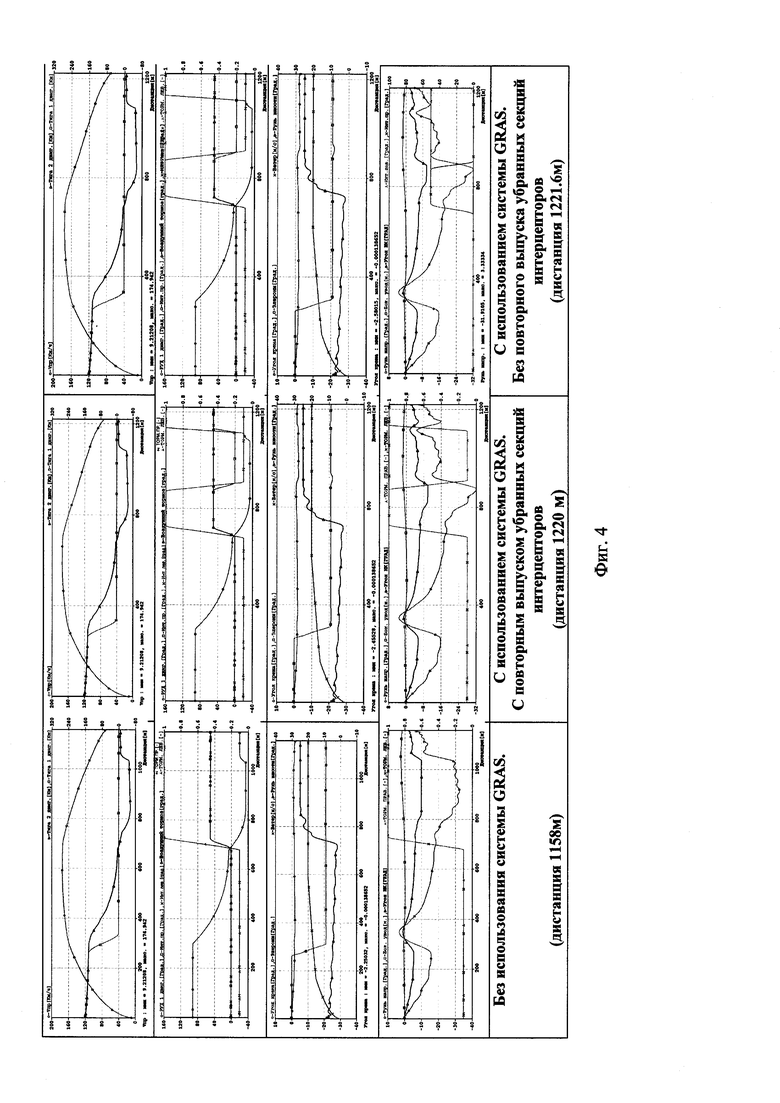
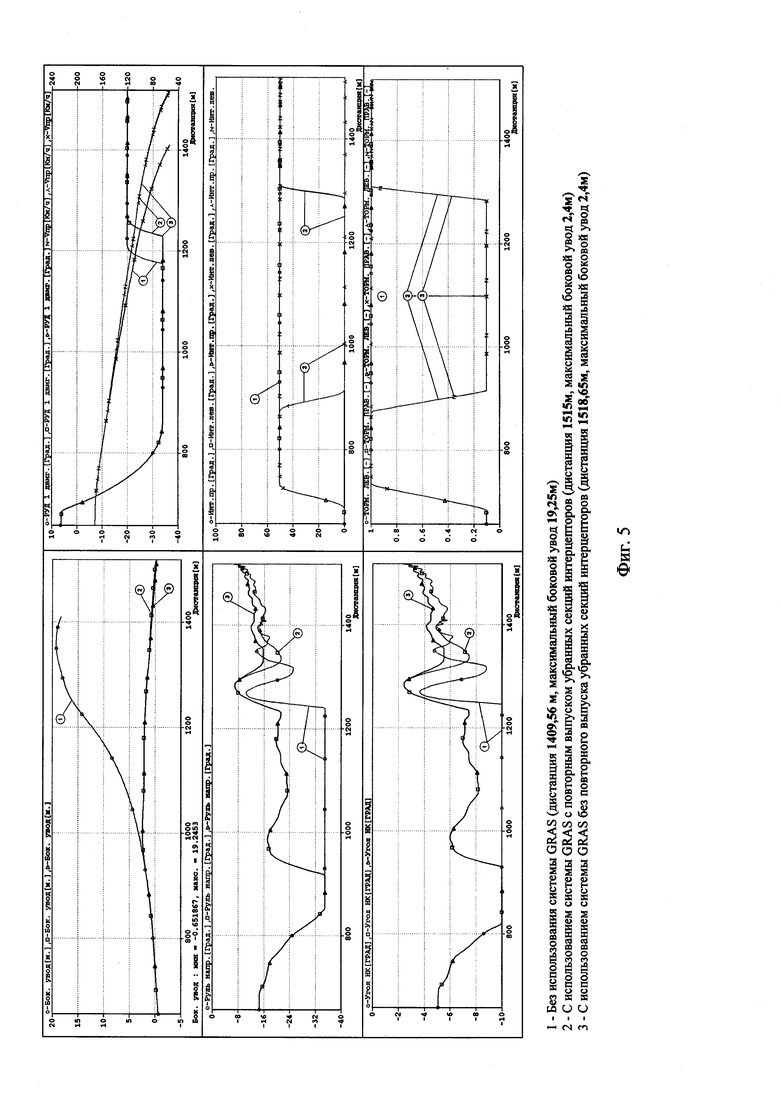
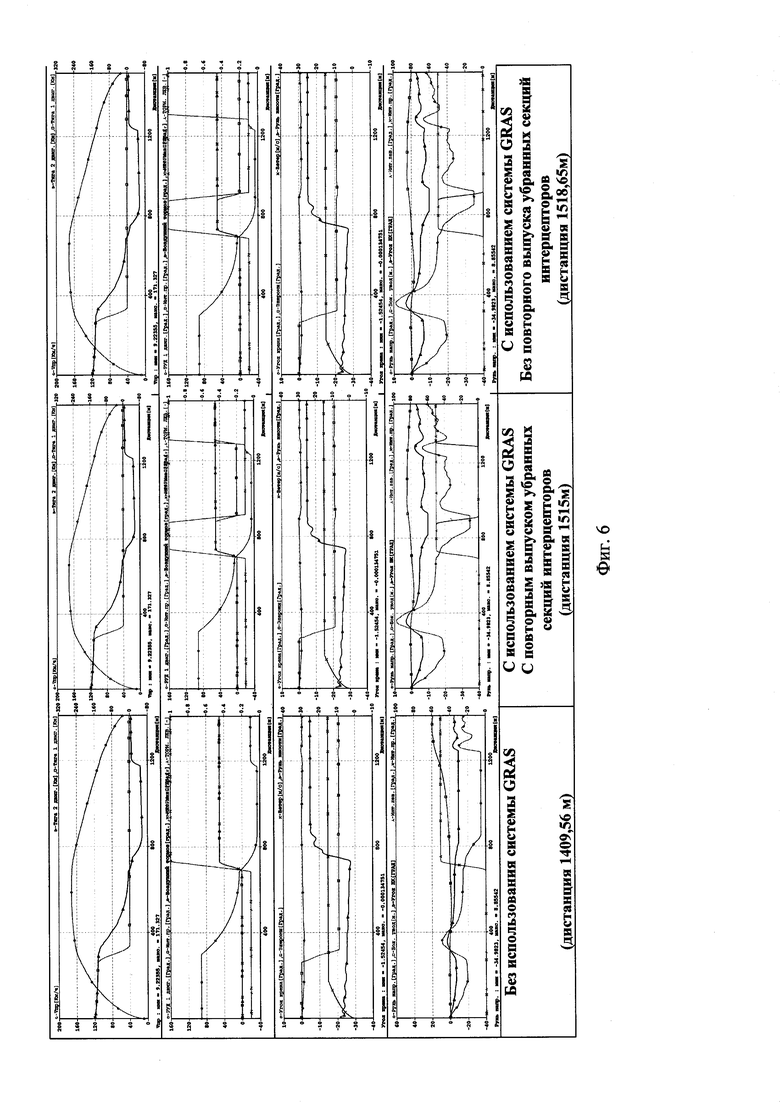
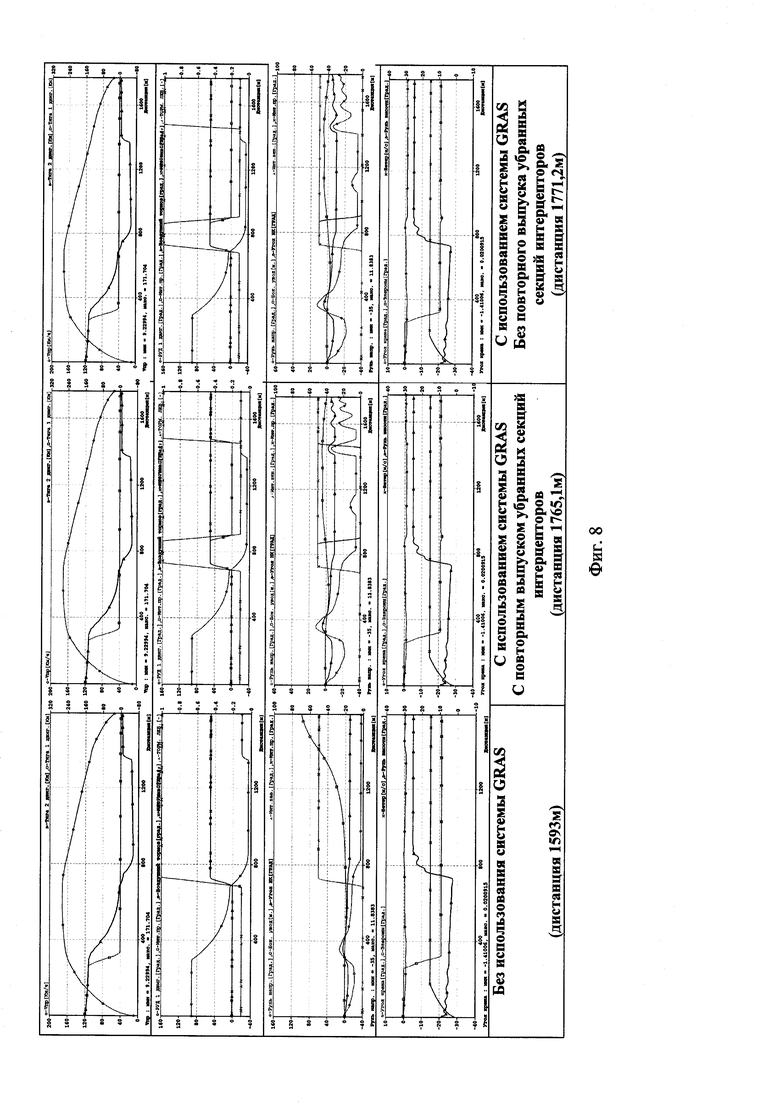
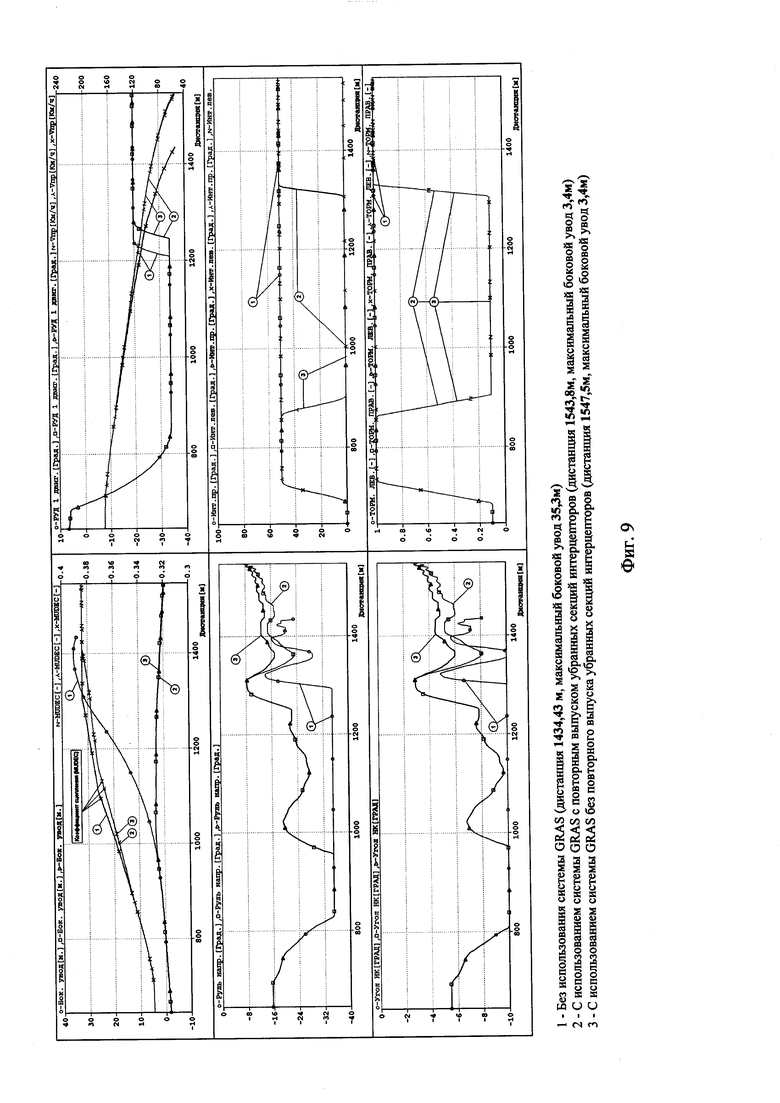
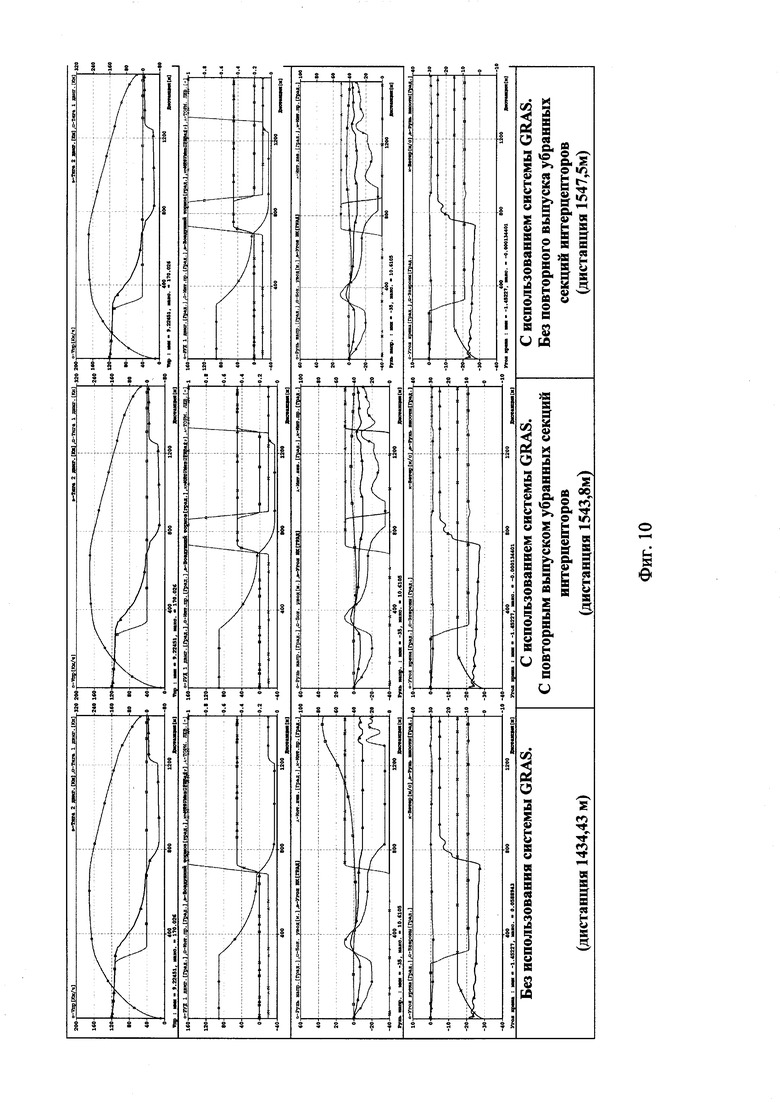
На Фиг. 3-10 представлены некоторые результаты работы системы автоматического дифференциального управления, реализующей предложенный способ (далее по тексту -системы GRAS), на примере математического моделирования прерванного взлета самолета Ту-204СМ на сухой (Фиг. 3, 4), влажной (Фиг. 5, 6), покрытой льдом (Фиг. 7, 8) и покрытой слоем воды 5 мм (Фиг. 9, 10) ВПП в условиях бокового ветра и отказа критического двигателя на скорости 150 км/ч.
Обозначения некоторых параметров, принятые на графиках:
Бок. увод - боковое смещение от оси ВПП [м];
Угол НК - угол поворота носовых колес [град.];
Руль напр. - угол отклонения руля направления [град.];
ТОРМ. ПРАВ. - сигнал на торможение колес правой стойки шасси 
ТОРМ. ЛЕВ. - сигнал на торможение колес левой стойки шасси 
Инт. лев. - угол отклонения интерцепторов на левом полукрыле [град.];
Инт. пр. - угол отклонения интерцепторов на правом полукрыле [град.];
MUDEC - нормируемый коэффициент сцепления колес с поверхностью ВПП, определенный по деселерометру (μs);
Y1, Y2, Y3 - вертикальные нагрузки на переднюю, правую и левую стойки шасси соответственно [Кн].
Процедуры прерванного взлета сводились к имитации следующих действий пилота:
- с запаздыванием 1 сек после обнаружения отказа двигателя, РУД работающего двигателя переводился в положение земного малого газа;
- после перевода РУД в положение земного малого газа, включался максимальный реверс тяги работающего двигателя, а руль высоты отклонялся на пикирование для повышения эффективности управляющих воздействий носовых колес;
- после уменьшения скорости до 110 км/ч отключался максимальный реверс тяги и включался малый реверс тяги работающего двигателя.
В процессе моделирования прерванного взлета имитировалось штурвальное (ручное) управление рулем направления, направленное на удержание самолета на оси ВПП, и штурвальное (ручное) управление элеронами, направленное на минимизацию угла крена. Система GRAS подключалась в режим «GRAS - взлет» автоматически по условиям перевода РУД из взлетного положения в положение земной малый газ при наличии признаков обжатия амортизаторов всех стоек шасси.
Рассмотрены варианты:
1. Без использования системы GRAS;
2. С использованием системы GRAS с оценкой возможности формирования команды на повторный выпуск убранных секций интерцепторов;
3. С использованием системы GRAS без повторного выпуска убранных секций интерцепторов (базовый вариант исполнения).
Результаты моделирования прерванного взлета с сухой ВПП (Фиг. 3, 4) показали, что применение системы GRAS позволяет выполнить прерванный взлет после отказа критического двигателя на скорости 150 км/ч в условиях максимального бокового ветра 20 м/с. Основная опасность выполнения прерванного взлета в этих условиях без системы GRAS заключается в реальной угрозе разрушения пневматиков передней стойки шасси, т.к. в процессе парирования боковых возмущений без применения системы GRAS, носовые колеса достигают ограничения максимального угла отклонения и находятся в этом положении длительный период времени. При использовании системы GRAS носовые колеса достигают максимального угла отклонения, но находятся в этом положении не более 2 секунд. Формирование управляющих сигналов системы GRAS на тормоза колес и секции интерцепторов позволило снять носовые колеса с упора максимального угла отклонения и полностью восстановить управляемость с более чем 50% запасом по углу отклонения носовых колес и руля направления. При этом формирование сигналов системы GRAS позволило существенно (в 1,5-2 раза) уменьшить боковую нагрузку на переднюю стойку шасси. Оценка двух способов управления секциями интерцепторов по командам GRAS показала, что запрет на повторный выпуск убранных в процессе работы системы GRAS секций интерцепторов (базовый вариант исполнения) позволяет повысить эффективность управляющих воздействий рулем направления и носовыми колесами (увеличить диапазон углов отклонения руля направления и носовых колес при меньшем боковом смещении от оси ВПП) на заключительном этапе прерванного взлета на скоростях меньше минимальной иволютивной скорости движения по земле (VMCG). При этом запрет на повторный выпуск убранных секций интерцепторов увеличивает дистанцию прерванного взлета на 1,6 м. По сравнению с результатами прерванного взлета без системы GRAS срабатывание системы GRAS в процессе выполнения прерванного взлета после отказа критического двигателя с сухой ВПП увеличило дистанцию прерванного взлета на 64 м (с 1158 м без системы GRAS до 1222 м с системой GRAS с запретом на повторный выпуск убранных секций интерцепторов).
Результаты моделирования прерванного взлета с влажной ВПП (Фиг. 5, 6) показали, что без системы GRAS в условиях бокового ветра 15 м/с и отказа критического двигателя боковое смещение от оси ВПП достигает величины 19,2 м при полной потере управляемости в боковом движении до момента времени отключения максимального реверса тяги. Подключение системы GRAS по условию потери управляемости в боковом движении позволило полностью восстановить управляемость, обеспечив существенный (50%) прирост запаса руля направления и угла отклонения носовых колес, при этом, работа системы GRAS обеспечила возможность движения по ВПП с максимальным боковым смещением от оси ВПП Zg max=2,4 м с постепенным полным его устранением к моменту завершения режима прерванного взлета. Срабатывание системы GRAS в условиях движения по влажной ВПП привело к увеличению дистанции прерванного взлета на 109 м (от 1409,56 м без системы GRAS до 1518,65 м с системой GRAS). Запрет на повторный выпуск убранных секций интерцепторов в системе GRAS не оказал существенного влияния на дистанцию прерванного взлета, увеличив ее на 3,65 м, но позволил повысить эффективность управляющих воздействий рулем направления и носовыми колесами (увеличен диапазон по углам отклонения руля направления и носовых колес при меньшем боковом смещении от оси ВПП) на заключительном этапе прерванного взлета на скоростях меньше минимальной иволютивной скорости движения по земле (VMCG).
Результаты моделирования прерванного взлета с ВПП, покрытой слоем льда (Фиг. 7, 8), показали, что без системы GRAS в условиях бокового ветра 15 м/с и отказа критического двигателя боковое смещение от оси ВПП достигает величины 98,6 м при полной потере управляемости в боковом движении без возможности ее восстановления. Подключение системы GRAS по условию потери управляемости в боковом движении позволило временно восстановить управляемость с возможностью перемещать руль направления в пределах 8 градусов. Этого запаса управляемости хватило для предотвращения бокового выкатывания, и уменьшения максимального бокового смещения от 98,6 м (без системы GRAS) до 5,3 м (с системой GRAS). Полное восстановление управляемости достигается после отключения максимального реверса и включении малого реверса тяги.
Дополнительное повышение управляемости дает запрет на повторный выпуск убранных системой GRAS секций интерцепторов. Дистанция прерванного взлета с применением системы GRAS достигала величины 1771,2 м с учетом запрета на повторный выпуск убранных системой GRAS секций интерцепторов.
Результаты моделирования прерванного взлета с ВПП, покрытой слоем воды 5 мм (Фиг. 9, 10) показали, что без системы GRAS в условиях бокового ветра 15 м/с и отказа критического двигателя боковое смещение от оси ВПП достигает величины 35,3 м при полной потере управляемости в боковом движении до тех пор, пока работает максимальный реверс тяги. Управляемость полностью восстанавливается после отключения максимального реверса. Подключение системы GRAS по условию потери управляемости позволило полностью восстановить управляемость в боковом движении с надежным удержанием самолета на оси ВПП с максимальным боковым смещением 3,4 м. Дополнительное увеличение управляемости в боковом движении дает запрет на повторный выпуск убранных системой GRAS секций интерцепторов. При использовании системы GRAS дистанция прерванного взлета составила 1547,5 м, без использования системы GRAS дистанция прерванного взлета достигала величины 1434,43 м с боковым выкатыванием 35,3 м.
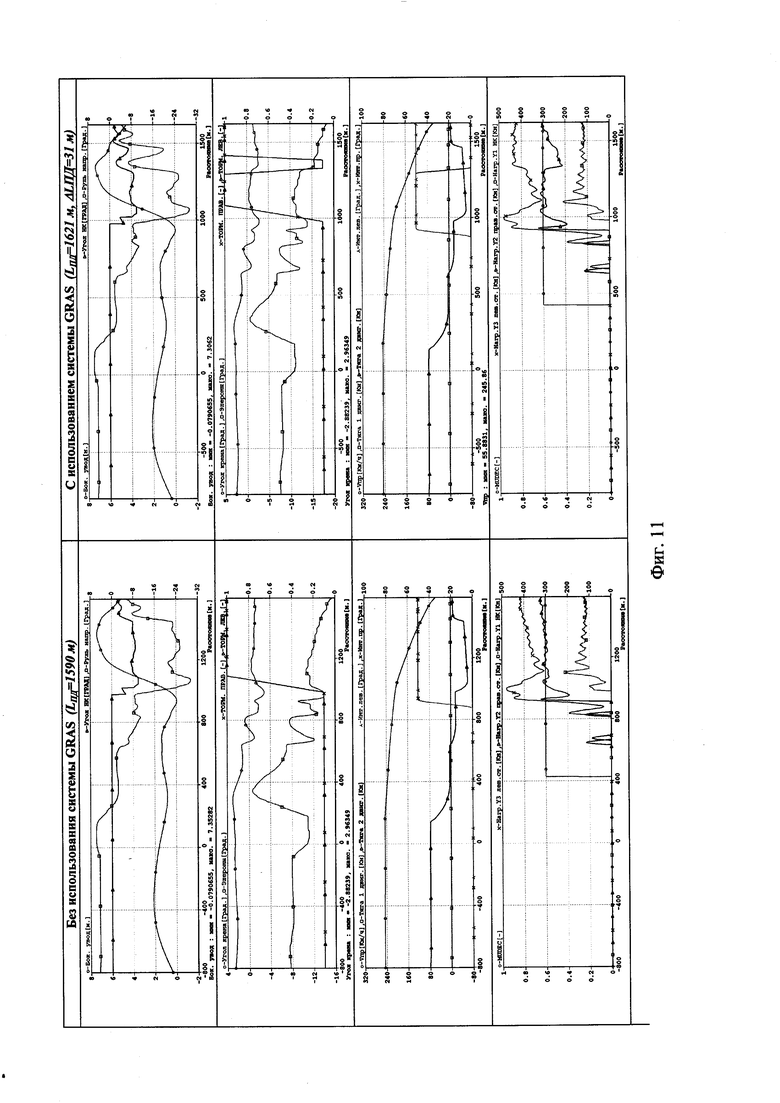
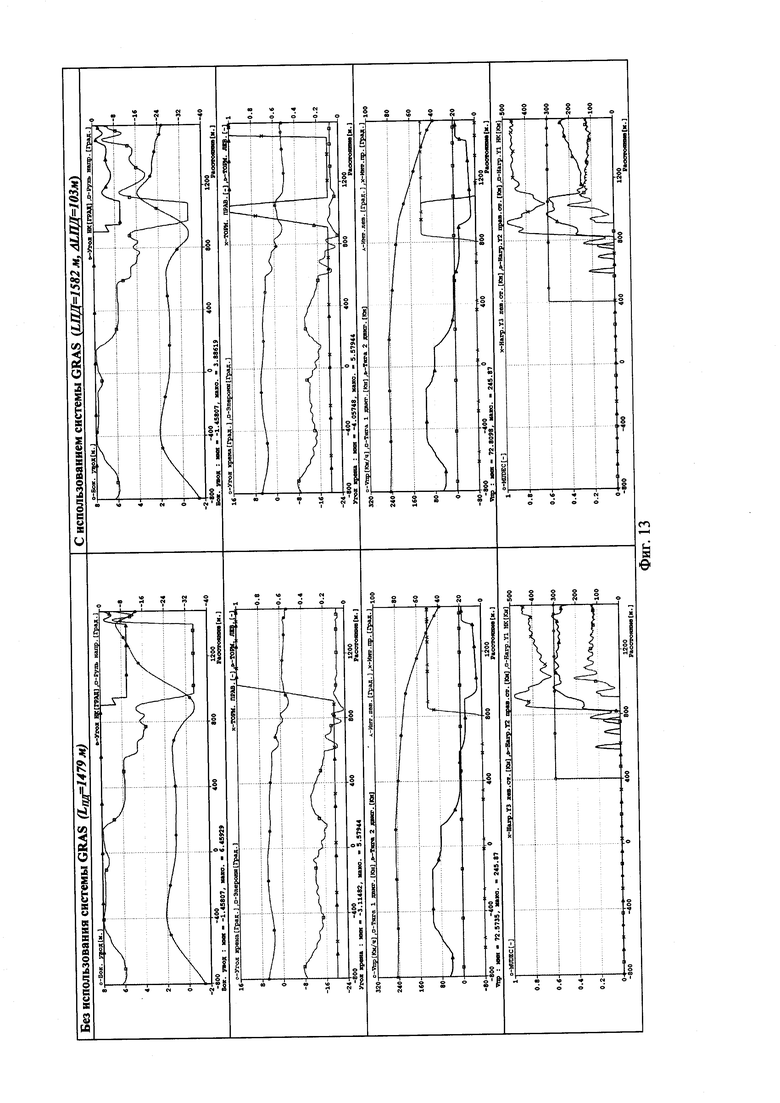
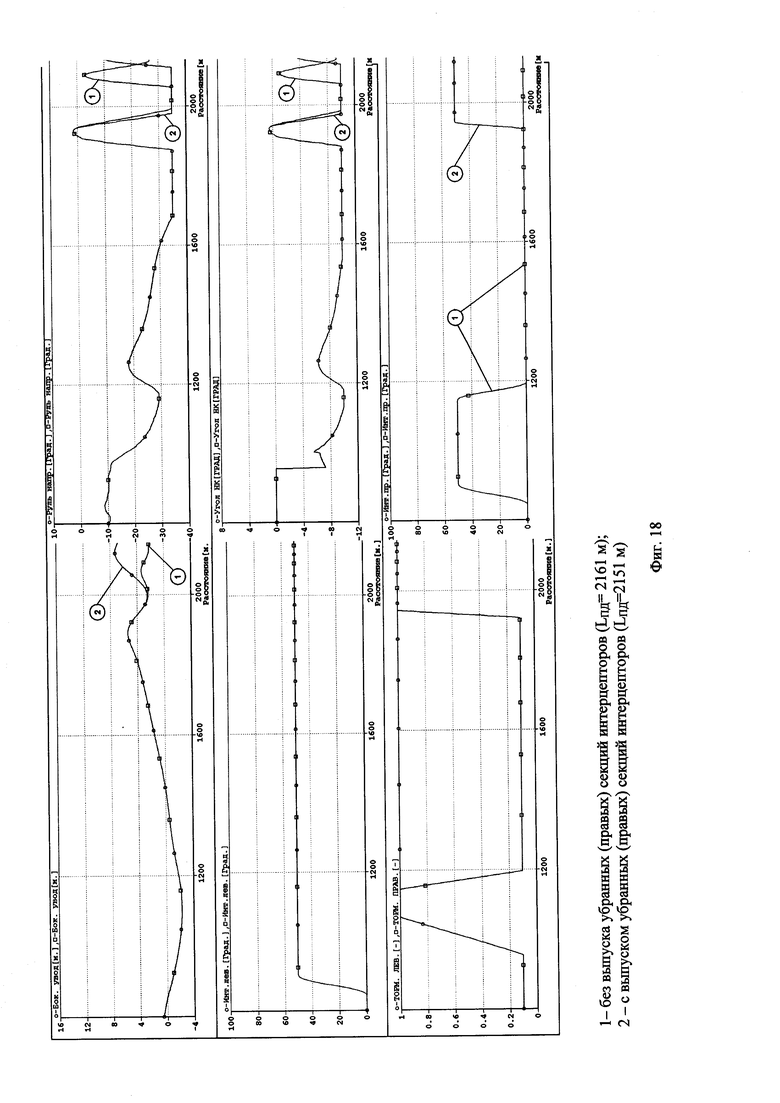
На Фиг. 11-20 представлены некоторые результаты математического моделирования посадки самолета Ту-204СМ на сухую (Фиг. 11-14), влажную (Фиг. 15, 16), покрытую льдом (Фиг. 17, 18) и покрытую слоем воды 5 мм (Фиг. 19, 20) взлетно-посадочную полосу (ВПП) в условиях бокового ветра и отказавшим на глиссаде критическим двигателем.
Действия пилота на посадке и пробеге моделировались по следующей схеме:
- на высоте начала дросселирования тяги (5 м по данным радиовысотомера) РУД работающего двигателя переводился в положение земного малого газа (система GRAS армируется для посадки (подготавливается к работе с формированием признака «GRAS -посадка» и выбором от ВСС курса ВПП для посадки);
- после первого касания ВПП РУД работающего двигателя переводился на режим малого реверса;
- после обжатия амортизатора передней стойки РУД работающего двигателя переводился на режим максимального реверса, а руль высоты переводился на пикирование для прижатия носовых колес;
- при уменьшении приборной скорости до 110 км/ч РУД работающего двигателя переводился на режим малого реверса.
В процессе выполнения пробега имитировалось штурвальное (ручное) управление рулем направления, направленное на удержание самолета на оси ВПП, и штурвальное (ручное) управление элеронами, направленное на минимизацию угла крена.
Система GRAS, подключенная в режим «GRAS - посадка», автоматически по условиям перевода РУД в положение меньше или равном земному малому газу и появлении признака обжатия амортизатора передней амортизационной стойки формирует сигналы на полное торможение колес и выпуск всех секций интерцепторов в режиме торможения.
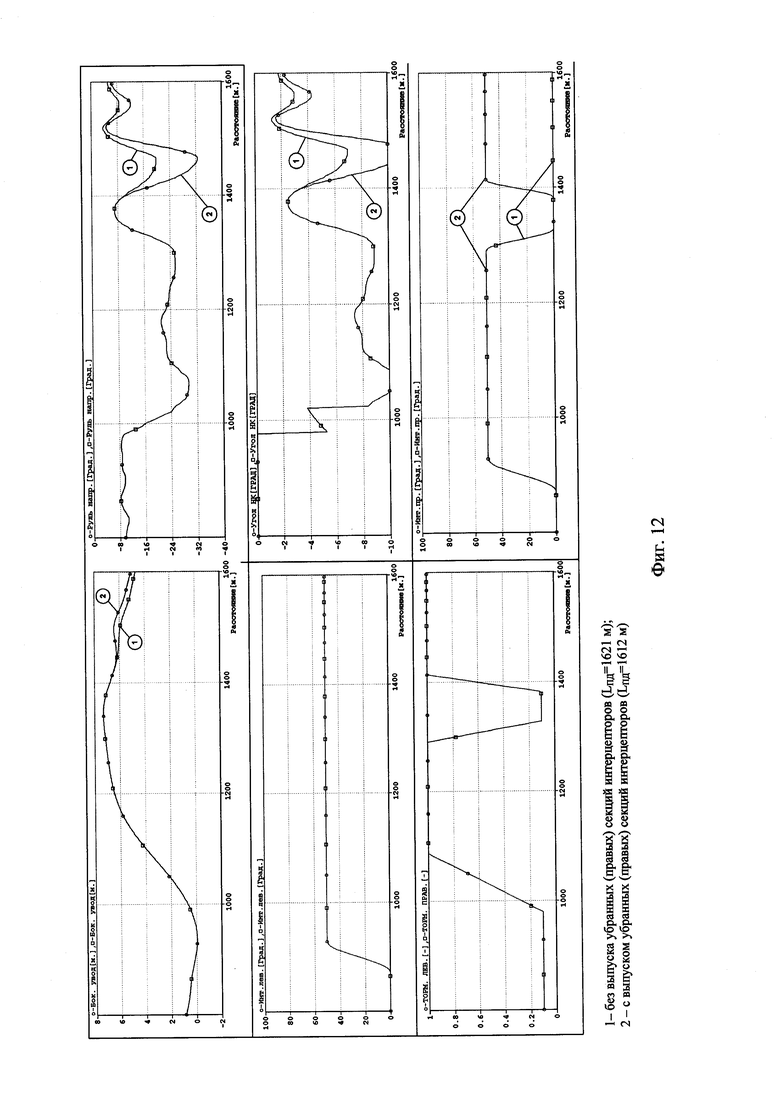
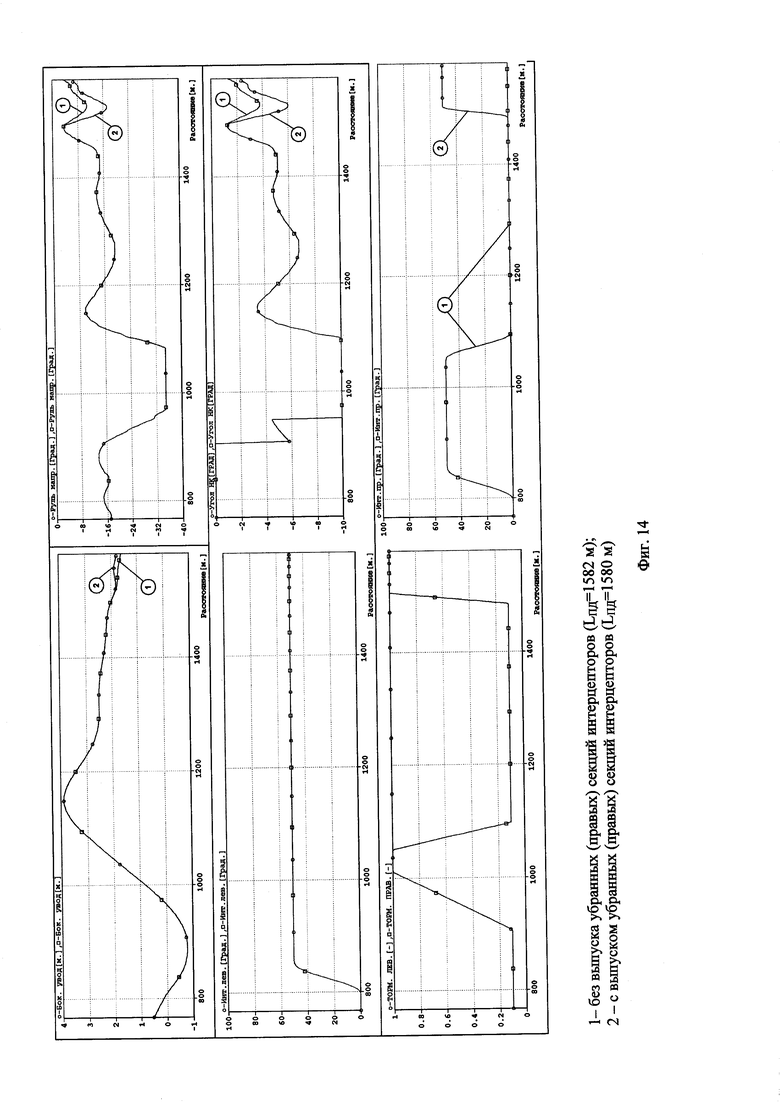
Варианты посадки самолета Ту-204СМ на сухую ВПП в условиях бокового ветра с отказавшим критическим двигателем показали, что использование системы GRAS позволяет разгрузить руль направление и носовые колеса и увеличить допустимый боковой ветер с 15 м/с (Фиг. 11, 12) до 20 м/с (Фиг. 13, 14).
Пробег в условиях бокового ветра 15 м/с сопровождался кратковременным растормаживанием колес правой стойки шасси по условию достижения по максимально допустимому углу отклонения носовых колес, при этом, максимальный боковой увод достигал величины 7,3 метра. Запрет на повторный выпуск убранных системой GRAS секций интерцепторов позволил дополнительно улучшить характеристики управляемости в боковом движении при условии увеличении длины пробега на 9 метров. По сравнению с вариантом посадки без использования системы GRAS, посадочная дистанция увеличилась на 31 метр и достигала значения 1621 м.
Без использования системы GRAS увеличение бокового ветра до 20 м/с привело к полной потере управляемости в боковом движении при выполнении пробега на режиме максимального реверса тяги работающего двигателя (см. Фиг. 13). Управляемость восстанавливается только при изменении режима работы двигателя от максимального реверса тяги до минимального на скорости 110 км/ч. При этом достигается максимальный боковой увод 6,5 м.
С использованием системы GRAS управляемость в боковом движении на пробеге в условиях бокового ветра 20 м/с восстанавливается через 2 секунды после сформированных условий потери управляемости. Работа системы GRAS позволила обеспечить как минимум 50% запас хода руля направления и носовых колес при уменьшении максимального смещения от оси ВПП до 3,9 м. По сравнению с пробегом в условиях бокового ветра 15 м/с, для сохранения управляемости в условиях бокового ветра 20 м/с потребовалось увеличение времени движения самолета с расторможенными колесами правой стойки, при этом посадочная дистанция достигла величины 1582 м. Запрет на повторный выпуск убранных системой GRAS секций интерцепторов в процессе восстановления управляемости позволил дополнительно улучшить характеристики управляемости в боковом движении при условии увеличении длины пробега на 2 метра.
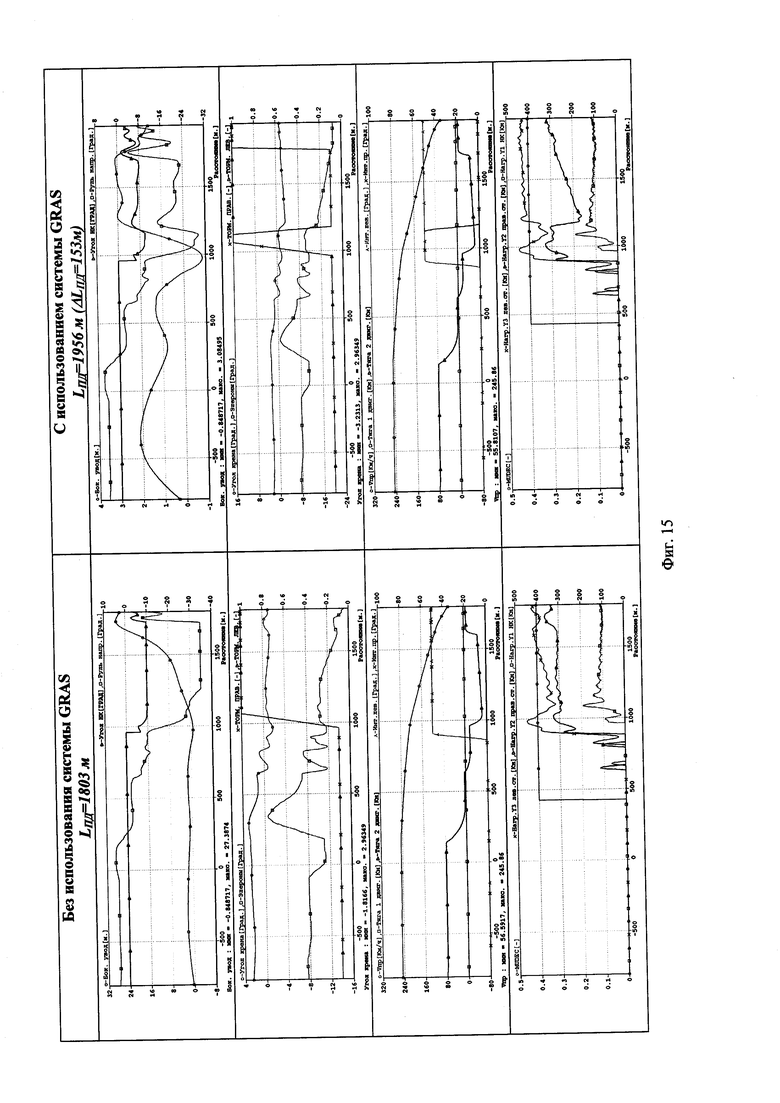
Результаты моделирования посадки на влажную ВПП (Фиг. 15, 16) показали, что без использования системы GRAS происходит полная потеря управляемости в боковом движении при выполнении пробега с использованием максимального реверса тяги работающего двигателя. При этом боковое смещение от оси ВПП достигает величины 27,4 м.
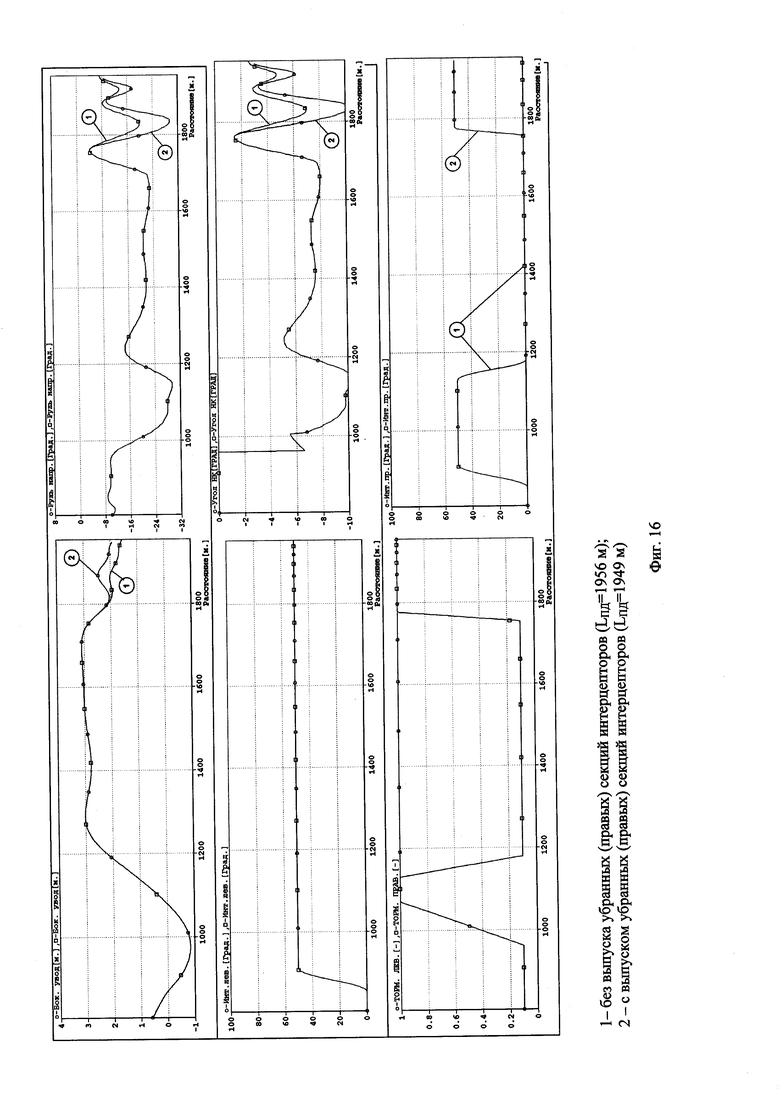
С использованием системы GRAS управляемость в боковом движении на пробеге по влажной ВПП восстанавливается сразу после сформированных условий потери управляемости. Работа системы GRAS позволила обеспечить 50% запас хода руля направления и носовых колес при уменьшении максимального смещения от оси ВПП до 3,1 м. Восстановление и поддержание требуемого запаса управляемости в боковом движении потребовало увеличение посадочной дистанции на 153 метра (Lпд=1956 м) по сравнению с посадкой в аналогичных условиях без использования системы GRAS. Запрет на повторный выпуск убранных системой GRAS секций интерцепторов позволил дополнительно улучшить характеристики управляемости в боковом движении при условии увеличения длины пробега на 7 метров (см. Фиг. 16).
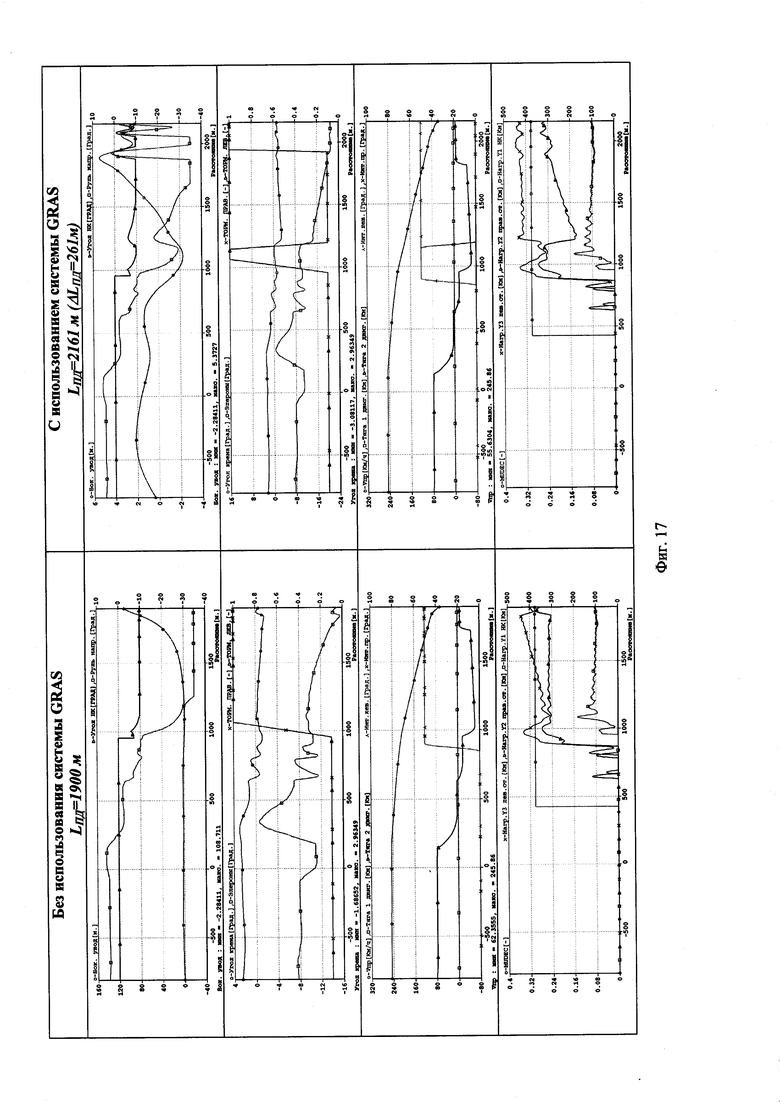
На Фиг. 17 и 18 приведены результаты моделирования посадки на ВПП, покрытую льдом в условиях бокового ветра 15 м/с с отказавшим критическим двигателем.
Бес применения системы GRAS самолет полностью теряет управляемость в боковом движении на пробеге без возможности ее восстановления. При этом самолет выкатывается за пределы ВПП с максимальным боковым смещением 108,7 м.
С использованием системы GRAS управляемость в боковом движении на пробеге по ВПП, покрытой слоем льда восстанавливается сразу после сформированных условий потери управляемости. Работа системы GRAS позволила обеспечить примерно 30% запас хода руля направления и носовых колес при максимальном смещения от оси ВПП до 5,4 м. После срабатывания сигналов системы GRAS пробег выполнялся с постепенным увеличением расхода руля направления, однако запаса управляемости оказалось достаточно при условии своевременного перевода режима работающего двигателя на малый реверс тяги. Посадочная дистанция при выполнении посадки на лед с использованием системы GRAS достигала величины 2161 м.
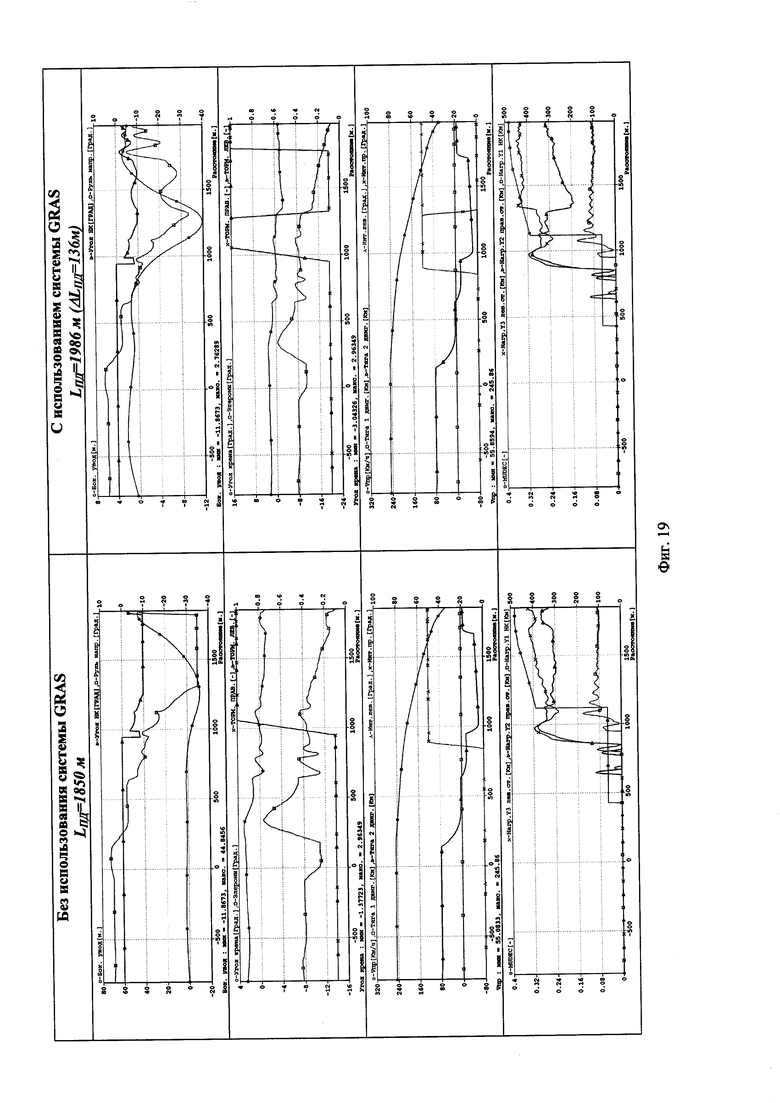
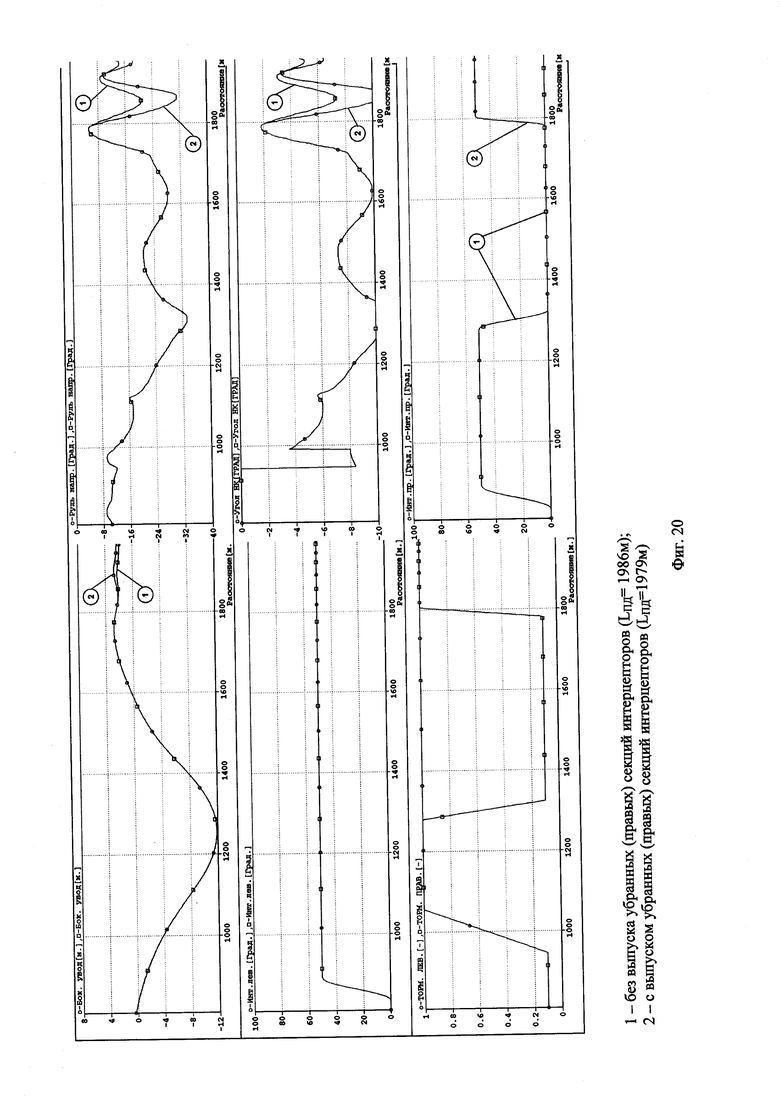
На Фиг. 19, 20 приведены результаты моделирования посадки на ВПП, покрытую слоем воды 5 мм в условиях бокового ветра 15 м/с с отказавшим критическим двигателем.
Без применения системы GRAS самолет полностью теряет управляемость в боковом движении на пробеге с возможность ее восстановления в конце пробега. При этом самолет выкатывается за пределы ВПП с максимальным боковым смещением от ее оси 45 м.
С использованием системы GRAS управляемость в боковом движении на пробеге по ВПП, покрытой слоем воды восстанавливается сразу после сформированных условий потери управляемости, при этом достигается максимальное смещение самолета от оси ВПП - 12 м. Работа системы GRAS позволила обеспечить полное восстановление управляемости в боковом движении до конца пробега. Запрет системе GRAS на выпуск убранных секций интерцепторов повышает эффективность управления в боковом движении при условии увеличения посадочной дистанции на 7 м. Посадочная дистанция с применением системы GRAS достигла величины 1986 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2017 |
|
RU2667411C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2018 |
|
RU2684961C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПО КУРСУ ПРИ ПОСАДКЕ | 2013 |
|
RU2539620C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЁТА САМОЛЁТА С УЧЕТОМ СТАБИЛИЗАЦИИ СКОРОСТИ | 2018 |
|
RU2689054C1 |
| СПОСОБ РЕВЕРСИРОВАНИЯ ТЯГИ ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И РЕВЕРСИВНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2768665C1 |
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ОПУСКАНИЕМ ПЕРЕДНЕЙ СТОЙКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПРОБЕГЕ ПО ПОВЕРХНОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 1992 |
|
RU2036821C1 |


Изобретение относится к способу автоматического формирования вспомогательных сигналов на наземном участке движения самолета. Для реализации способа используют управляющие сигналы системы датчиков, с помощью которых в вычислителе формируются вспомогательные управляющие сигналы на привод тормозов основных амортизационных стоек шасси, привод секций интерцепторов, привод управления поворотом носовых колес. Формирование вспомогательных управляющих сигналов осуществляют поэтапно определенным образом. Обеспечивается повышение эффективности управляющих воздействий на элементы системы управления самолетом на разбеге при необходимости выполнения прерванного взлета и посадке при выполнении пробега в условиях потери управляемости или угрозе бокового выкатывания самолета за пределы взлетно-посадочной полосы. 20 ил.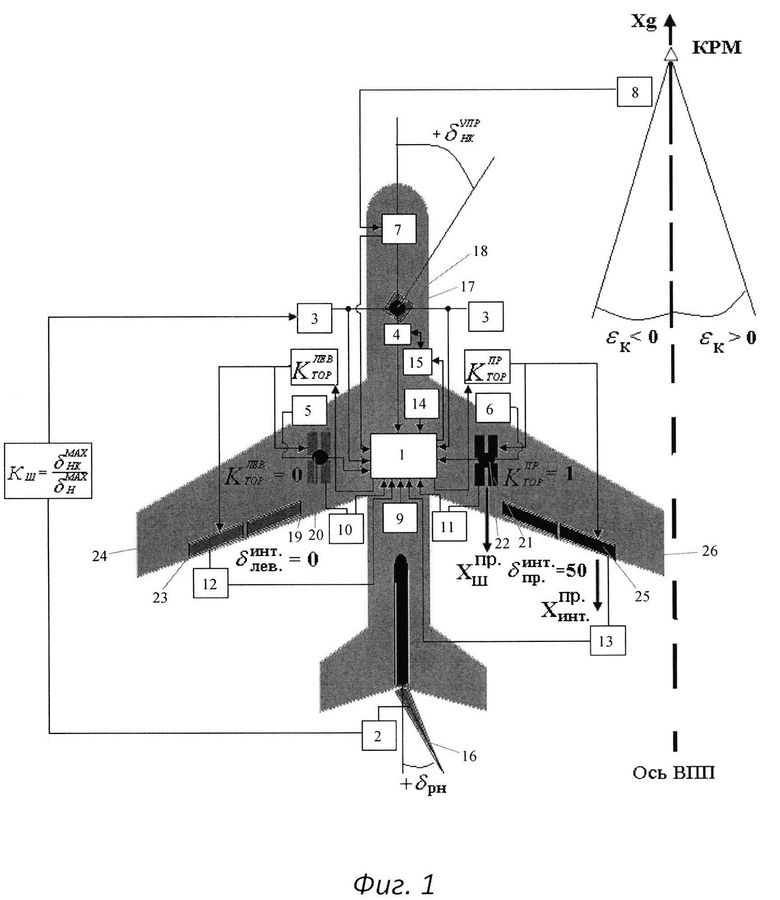
Способ автоматического формирования вспомогательных сигналов на наземном участке движения самолета, основанный на использовании управляющих сигналов, поступающих с системы датчиков в бортовой вычислитель, в котором формируются вспомогательные управляющие сигналы на привод тормозов основных амортизационных стоек шасси, привод управления поворотом носовых колес передней амортизационной стойки шасси, а также привод секций интерцепторов полукрыльев, характеризуется тем, что формирование упомянутых вспомогательных управляющих сигналов на пробеге и разбеге осуществляют поэтапно, при этом формирование вспомогательных управляющих сигналов на пробеге на первом этапе осуществляют при условии обжатия амортизатора передней стойки шасси и положения РУД не более земного малого газа, причем автоматическое дифференциальное управление тормозами колес основных амортизационных стоек шасси осуществляют посредством имитации обжатия левой и правой педалей тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес основных амортизационных стоек шасси за установленный системой временной отрезок, формирования сигнала на полный выпуск секций интерцепторов левого и правого полукрыльев за установленный системой временной отрезок, подключения носовых колес передней амортизационной стойки шасси в контур управления совместно с рулем направления с предварительным переводом носовых колес в режим свободной ориентации в течение установленного системой интервала времени с установленным системой диапазоном максимальных углов отклонения носовых колес на пробеге; формирование вспомогательных управляющих сигналов на пробеге на втором этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного уменьшения тормозного момента до максимальной величины расторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок и формирования сигнала на полную уборку секций интерцепторов левого/правого полукрыла за установленный системой временной отрезок, при этом упомянутые управляющие сигналы формируют по условию бокового смещения самолета влево/вправо относительно оси ВПП более установленной системой допустимой величины или при условии достижения или превышения установленного системой максимального допустимого угла отклонения носовых колес вправо/влево с учетом того, что носовые колеса находятся на этом ограничении не менее установленного системой временного отрезка; формирование вспомогательного управляющего сигнала на пробеге на третьем этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок, при этом упомянутый управляющий сигнал формируют при условии снятия носовых колес с ограничения по максимальному допустимому углу отклонения носовых колес и не достижении его в течение установленного системой временного отрезка при одновременном уменьшении бокового смещения самолета от оси ВПП до установленного системой допустимого значения; на первом этапе при разбеге формируют вспомогательный управляющий сигнал на включение управления поворотом носовых колес передней амортизационной стойки шасси при условии обжатия амортизаторов всех стоек шасси и взлетного положения РУД; на втором этапе при разбеге формируют управляющие сигналы на автоматическое дифференциальное управление тормозами колес основных амортизационных стоек шасси посредством имитации обжатия левой и правой педалей тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес основных амортизационных стоек шасси за установленный системой временной отрезок, а также одновременно формируют управляющий сигнал на полный выпуск секций интерцепторов левого и правого полукрыльев за установленный системой временной отрезок при условии перевода РУД в положение не более земного малого газа; формирование вспомогательных управляющих сигналов на разбеге на третьем этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного уменьшения тормозного момента до максимальной величины расторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок и формирования сигнала на полную уборку секций интерцепторов левого/правого полукрыла за установленный системой временной отрезок, при этом упомянутые управляющие сигналы формируют по условию бокового смещения самолета влево/вправо относительно оси ВПП более установленной системой допустимой величины или при условии достижения или превышения установленного системой максимального допустимого угла отклонения носовых колес вправо/влево с учетом того, что носовые колеса находятся на этом ограничении не менее установленного системой временного отрезка; формирование вспомогательного управляющего сигнала на разбеге на четвертом этапе осуществляют посредством имитации обжатия левой/правой педали тормоза путем линейного увеличения тормозного момента до максимальной величины заторможенности колес левой/правой амортизационной стойки шасси за установленный системой временной отрезок, при этом упомянутый управляющий сигнал формируют при условии снятия носовых колес с ограничения по максимальному допустимому углу отклонения носовых колес и не достижении его в течение установленного системой временного отрезка при одновременном уменьшении бокового смещения самолета от оси ВПП до установленного системой допустимого значения.
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПО КУРСУ ПРИ ПОСАДКЕ | 2013 |
|
RU2539620C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2018 |
|
RU2684961C1 |
| US 0003362757 A1, 09.01.1968 | |||
| US 0009221556 B2, 29.12.2015 | |||
| US 0007274309 B2, 25.09.2007. | |||

