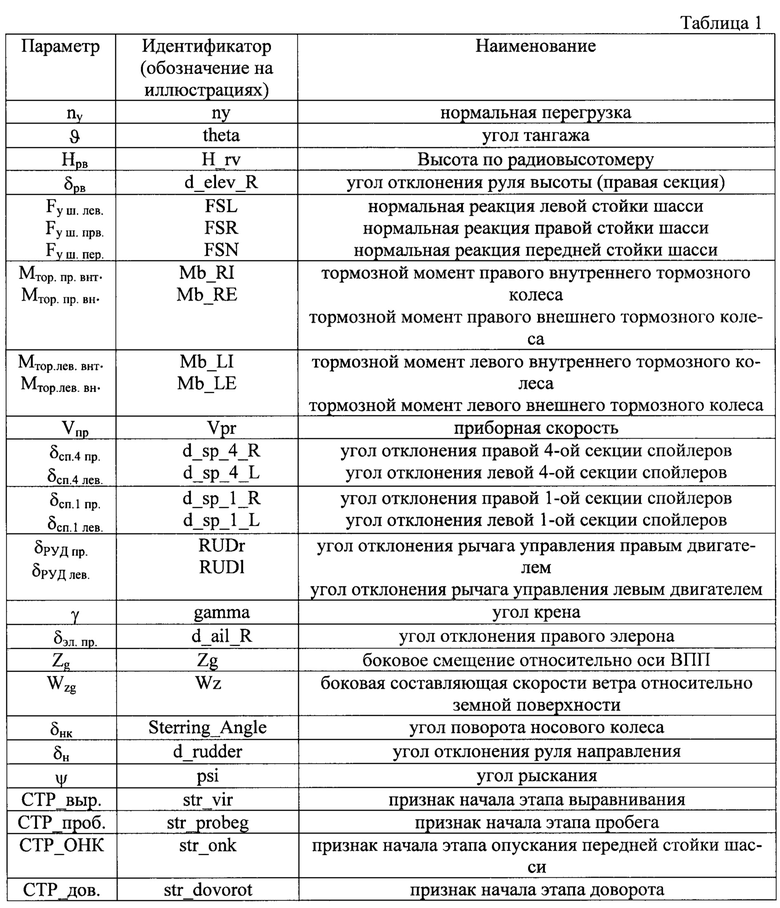
Изобретение относится к области авиации и может быть использовано в работе пилотажно-навигационного оборудования летательных аппаратов.
Актуальной задачей летной эксплуатации воздушных судов (ВС) является повышение уровня безопасности полетов. Повышение уровня безопасности полетов и эффективности эксплуатации при выполнении режима «Посадка» возможно за счет минимизации влияния «человеческого фактора» и использовании преимуществ адаптивного управления, а также за счет минимизации влияния возможных ошибок инерциальной навигационной системы (ИНС). Это может быть достигнуто путем решения задачи по сведению к минимуму или исключению влияния ошибки ИНС в определении путевого угла путем использования специальной логики определения среднего значения путевого угла на участке стабилизации самолета на курсе посадки.
Известен базовый способ управления самолетом в режиме «Посадка», который предполагает выполнение следующей последовательности действий:
1. При уменьшении высоты до 5 метров по радиовысотомеру:
- автомат тяги переключается в режим «стабилизации тяги» с переводом рычага управления двигателя (РУД) в положение земного малого газа.
2. С высоты 0,5 м по радиовысотомеру:
- управлением элеронами до конца пробега (Vпp≤70 км/ч) реализуется задача стабилизации нулевого значения угла крена;
- управлением рулем направления до конца пробега (Vпp≤70 км/ч) выполняется задача удержания самолета на оси взлетнопосадочной полосы (ВПП) по сигналам курсового радиомаяка (КРМ) и по величине магнитного и истинного курса, поступающих от ИНС, с учетом заданного пилотом или принятого от вычислительной системы самолетовождения (ВСС) курса ВПП.
3. После фиксации события раскрутки колес левой и правой стоек шасси или фиксации события касания колес левой и правой стоек шасси:
- автоматически выпускаются все средства аэродинамического торможения в соответствии с логикой автоматического выпуска интерцепторов и воздушных тормозов;
- управлением рулем высоты реализуется задача опускания самолета на переднюю опору шасси до фиксации события касания ВПП колесами передней опоры при условии касания ВПП колесами левой или правой стоек шасси (без возможности отмены в рамках способа);
- пилот переводит РУД в положение малого реверса.
4. После фиксации события касания ВПП колесами передней опоры шасси при условии касания ВПП колесами левой или правой стоек шасси:
- система автоматического управления (САУ) переводит руль высоты в положение на пикирование для дополнительного прижатия носового колеса;
- при педальном способе торможения пилот за 1 секунду полностью обжимает педали тормоза и удерживает их обжатыми до конца пробега;
- при автоматическом торможении при условии заданного режима замедления (LOW, MED, МАХ) подключается соответствующих режим автоматического торможения;
- пилот переводит РУД в положение максимального реверса.
5. При уменьшении приборной скорости до 110 км/ч:
- пилот переводит РУД в положение малого реверса.
6. При уменьшении приборной скорости до 70 км/ч:
- САУ отключается.
Базовый способ посадки предполагает использование при работе САУ сигналов глиссадного радиомаяка (ГРМ), курсового радиомаяка (КРМ) и сигналов ИНС, формирующих значения магнитного путевого угла и угла рыскания (магнитного курса).
ГРМ формирует равносигнальную зону, определяющую заданную траекторию снижения по углу εг, КРМ формирует равносигнальную зону, определяющую заданное направление движения вдоль оси ВПП по углу εк, ИНС формирует магнитный путевой угол  , определяющий движение самолета относительно заданного курса ВПП
, определяющий движение самолета относительно заданного курса ВПП  .
.
При известном курсе ВПП  , выход на ось ВПП обеспечивается минимизацией разности
, выход на ось ВПП обеспечивается минимизацией разности  и минимизацией углового отклонения от равносигнальной зоны КРМ (εк).
и минимизацией углового отклонения от равносигнальной зоны КРМ (εк).
Недостатком известного решения является то, что при формировании управляющих сигналов на руль направления не учитывается возможная систематическая погрешность в определении магнитного путевого угла, что может быть причиной бокового выкатывания самолета за пределы ВПП.
Задачей, на решение которой направлен заявляемый способ управления самолетом в режиме САУ «Посадка» является повышение качества посадки самолета путем сведения к минимуму или полному исключению влияния ошибки ИНС в определении путевого угла.
Поставленная задача решается путем использования способа управления самолетом в режиме САУ «Посадка» при котором используют сигналы ГРМ, КРМ и сигналы ИНС, формирующих значения магнитного путевого угла и угла рыскания. При этом ГРМ формирует равносигнальную зону, определяющую заданную траекторию снижения по углу εг, КРМ формирует равносигнальную зону, определяющую заданное направление движения вдоль оси ВПП по углу εк, а ИНС формирует магнитный путевой угол  определяющий движение самолета относительно заданного курса ВПП
определяющий движение самолета относительно заданного курса ВПП 
При этом на участке стабилизации самолета на курсе посадки, при условии 30 м<Н≤150 м, где Н высота, САУ выполняет процедуру осреднения путевого угла на i-ом шаге осреднения.
При снижении до высоты (Н) 30 м, САУ завершает процедуру осреднения и выполняет переопределение заданного курса ВПП, как 
При снижении до высоты (Н) 0,5 м, САУ формирует сигнал на руль направления, включающий в себя минимизацию разности между текущим путевым углом и переопределенном значением курса ВПП, полученном на основании выполненного на этапе стабилизации глиссады осреднения путевого угла. В управлении элеронами выполняется переключение от управления по сигналам КРМ (стабилизации курсовой зоны) на управление, направленное на минимизацию угла крена, а управление рулем направления (РН) переключается от задачи минимизации угла скольжения на задачу удержания самолета на оси взлетно-посадочной полосы (ВПП) по сигналам εк (отклонении от равносигнальной зоны КРМ), путевого угла (отклонении от курса ВПП ()) и угла рыскания (ψ).
Процедуру осреднения путевого угла на i-ом шаге осреднения предпочтительно выполняют по формуле:

Под термином «участок стабилизации самолета на курсе посадки» понимают участок после входа самолета в линейную зону сигнала КРМ и стабилизации самолета в линейной зоне сигнала КРМ при условии стабилизации глиссады.
Условие стабилизации глиссады САУ формирует если принят признак захвата глиссады (|εг|<0.0875ргм) и после захвата глиссады прошло не менее 10 секунд и при условии Vy<0 м/с, где Vy - вертикальная скорость снижения по глиссаде. Указанное время является необходимым временем от захвата до стабилизации глиссады. Обычно оно составляет 10-15 секунд.
Условие входа самолета в линейную зону сигнала КРМ и стабилизации самолета в линейной зоне сигнала КРМ наступает при |εк|<0.0155ргм (ширина линейной зоны), высоте 30 м<Н≤150 м (участок стабилизации глиссады и курса), отклонении курса ВПП  (допустимое отклонение от куса ВПП, учет данного параметра предпочтителен, но не обязателен при работе САУ), модуле угловой скорости рыскания |ωу|<0.5 град/с и модуле угловой скорости крена
(допустимое отклонение от куса ВПП, учет данного параметра предпочтителен, но не обязателен при работе САУ), модуле угловой скорости рыскания |ωу|<0.5 град/с и модуле угловой скорости крена  При этих условиях самолет допустимо близок к состоянию балансировки по курсу и глиссаде.
При этих условиях самолет допустимо близок к состоянию балансировки по курсу и глиссаде.
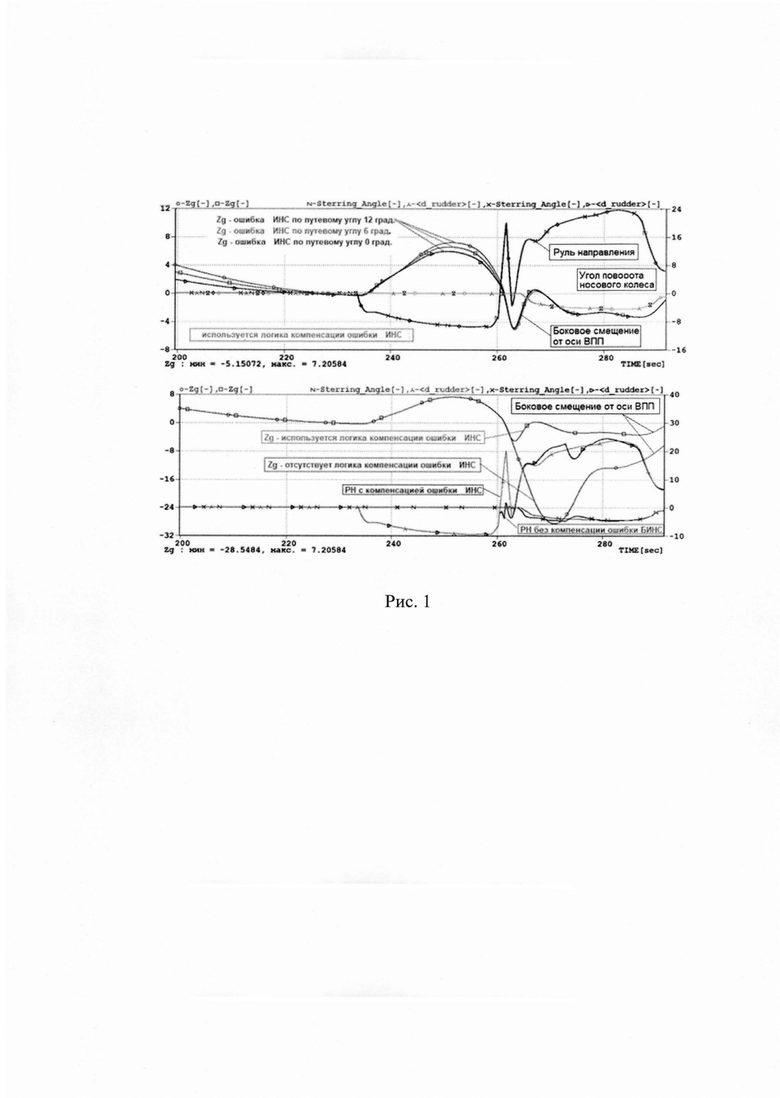
На рис. 1 приведены результаты математического моделирования управления самолетом в режиме САУ «Посадка» при посадке в условиях градиентного бокового ветра слева Wzg=15 м/с на сухую ВПП (μS=0.75). Наэр=0 м, МСА. Отказ правого двигателя на высоте 100 м.
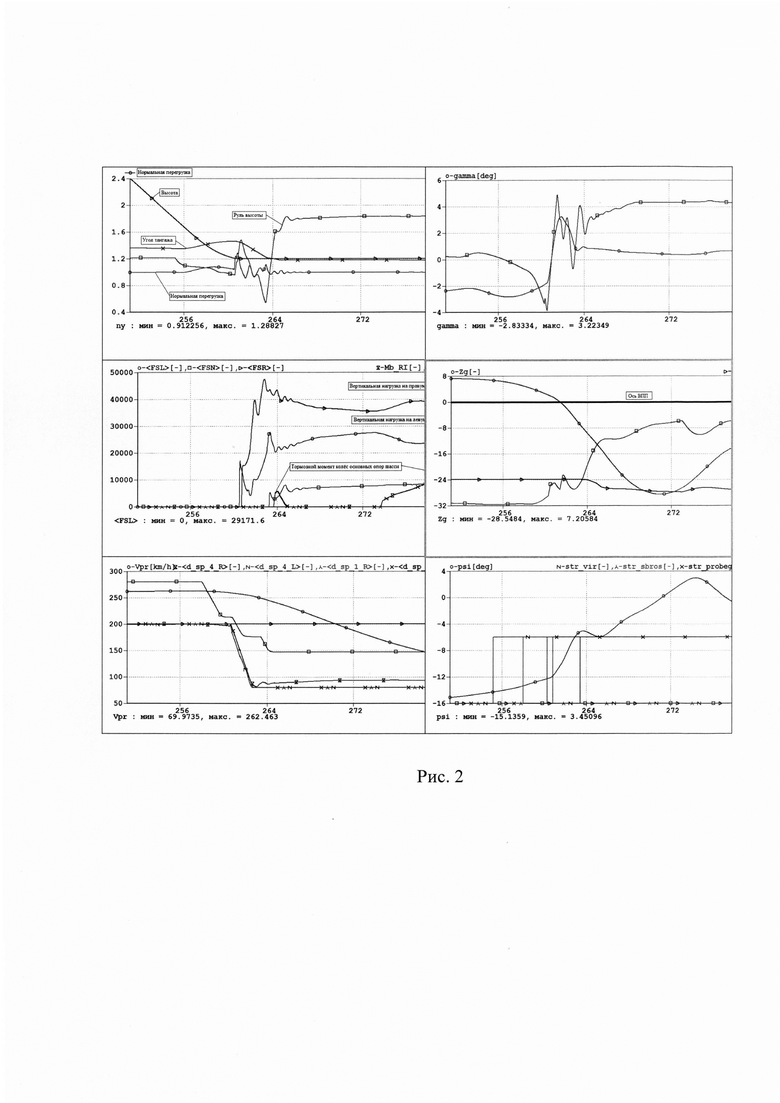
На рис. 2 приведены результаты математического моделирования управления самолетом в режиме САУ «Посадка» при посадке в условиях градиентного бокового ветра слева Wzg=15 м/с на сухую ВПП (μS=0-75). Наэр=0 м, МСА. Отказ правого двигателя на высоте 100 м. Отсутствует логика осреднения путевого угла. Ошибка ИНС по магнитному путевому углу 12 град.
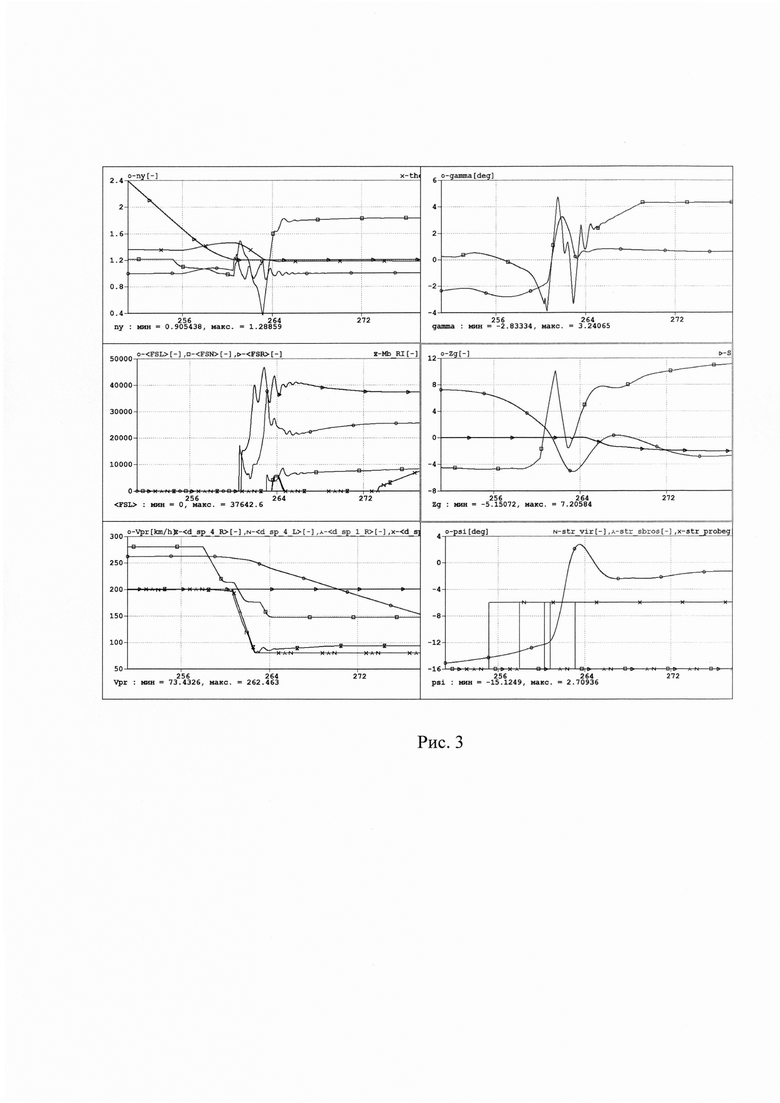
На рис. 3 приведены результаты математического моделирования управления самолетом в режиме САУ «Посадка» при посадке в условиях градиентного бокового ветра слева Wzg=15 м/с на сухую ВПП (μS=0.75). Наэр=0 м, МСА. Отказ правого двигателя на высоте 100 м. Используется логика осреднения путевого угла. Ошибка ИНС по магнитному путевому углу 12 град.
Обозначения параметров, показанных на рисунках, поясняются в таблице 1.
Из приведенных результатов математического моделирования видно, что реализация способа автоматического управления самолетом в режиме САУ «Посадка» с учетом предлагаемого осреднения магнитного путевого угла по сигналам КРМ и корректировки курса ВПП позволяет полностью устранить влияние ошибок ИНС на характеристики пробега при наличии систематической погрешности в определении путевого угла.
На рис. 1 приведен сравнительный анализ результатов посадки самолета в одинаковых условиях с использованием осреднения путевого угла при различных ошибках в его определении. Из сравнения видно, что при неизменной ошибке предлагаемый способ полностью устраняет ее влияние на характеристики пробега.
На рис. 2 приведены результаты математического моделирования посадки и пробега магистрального двухдвигательного самолета по сухой ВПП с отказавшим критическим двигателем в условиях бокового ветра Wzg=15 м/с без учета предлагаемой логики осреднения путевого угла.
В модель работы ИНС была заведена постоянная ошибка в виде систематической погрешности в определении путевого угла 12 град. Сформированные условия касания ВПП позволили выпустить все секции интерцепторов в один прием на полный угол. В процессе опускания носового колеса угол крена достигал максимальной величины 3,2 град с последующей полной его уборкой в процессе пробега.
Введенная ошибка путевого угла основное влияние оказала на этап стабилизации курса посадки и этап доворота, на котором руль направления не оказал необходимого сопротивления боковому смещению самолета от оси ВПП: на высоте 30 м боковое смещение от осевой линии ВПП достигало величины 8 м, а на этапе доворота руль направления не смог остановить тенденцию к боковому выкатыванию и, в конечном итоге, самолет выкатился за пределы ВПП с боковым смещением -28,5 м.
На рис. 3 приведены результаты математического моделирования пробега в тех же условиях, что и в предыдущем, рассмотренном варианте, но с реализацией предлагаемой логики осреднения путевого угла и переопределения курса ВПП. Переход на скорректированный курс ВПП на этапах доворота и пробега позволил выполнить пробег в пределах ВПП с максимальным боковым смещением в пределах 5 м.
Заявленный способ управления самолетом в режиме САУ «Посадка» позволяет решить задачу по сведению к минимуму или исключению влияния ошибки ИНС в определении путевого угла путем использования специальной логики определения среднего значения путевого угла на участке стабилизации самолета на курсе посадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
Изобретение относится к способу управления самолетом в режиме системы автоматического управления «Посадка». Способ заключается в том, что, используя сигналы глиссадного радиомаяка, курсового радиомаяка и сигналы инерциальной навигационной системы, формирующие значения магнитного путевого угла и угла рыскания, на участке стабилизации самолета на курсе посадки выполняют с помощью системы автоматического управления процедуру осреднения путевого угла на определенной высоте, завершают осреднение, выполняют переопределение заданного курса и формируют сигнал на руль управления на основе минимизации разности между текущим путевым углом и переопределенным значением курса, управление элеронами переключается от управления по сигналам курсового радиомаяка на управление, направленное на минимизацию угла крена, а управление рулем направления переключается от минимизации угла скольжения на удержание самолета на оси взлетно-посадочной полосы по сигналам отклонения от курса взлетно-посадочной полосы и угла рыскания. Обеспечивается повышение качества посадки. 3 ил.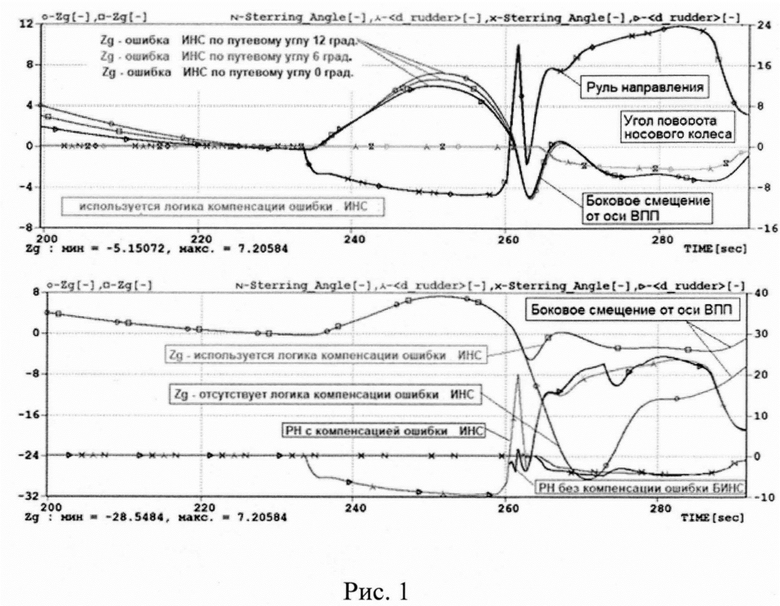
Способ управления самолетом в режиме системы автоматического управления «Посадка», при котором используют сигналы глиссадного радиомаяка, курсового радиомаяка и сигналы инерциальной навигационной системы, формирующие значения магнитного путевого угла и угла рыскания, при этом глиссадный радиомаяк формирует равносигнальную зону, определяющую заданную траекторию снижения по углу εг, курсовой радиомаяк формирует равносигнальную зону, определяющую заданное направление движения вдоль оси взлетнопосадочной полосы по углу εк, а инерциальная навигационная система формирует магнитный путевой угол (Ψ), определяющий движение самолета относительно заданного курса взлетно-посадочной полосы (ΨВПП), отличающийся тем, что на участке стабилизации самолета на курсе посадки, при условии 30 м<Н≤150 м, где Н высота полета относительно уровня ВПП, система автоматического управления выполняет процедуру осреднения путевого угла на i-м шаге осреднения, при снижении до высоты Н 30 м завершает процедуру осреднения и выполняет переопределение заданного курса взлетно-посадочной полосы как  при снижении до высоты Н 0,5 м формирует сигнал на руль управления, включающий в себя минимизацию разности между текущим путевым углом и переопределенным значением курса взлетно-посадочной полосы, полученным на основании выполненного на этапе стабилизации глиссады осреднения путевого угла, управление элеронами переключается от управления по сигналам курсового радиомаяка на управление, направленное на минимизацию угла крена, а управление рулем направления переключается от минимизации угла скольжения на удержание самолета на оси взлетно-посадочной полосы по сигналам εк, отклонение от курса взлетно-посадочной полосы
при снижении до высоты Н 0,5 м формирует сигнал на руль управления, включающий в себя минимизацию разности между текущим путевым углом и переопределенным значением курса взлетно-посадочной полосы, полученным на основании выполненного на этапе стабилизации глиссады осреднения путевого угла, управление элеронами переключается от управления по сигналам курсового радиомаяка на управление, направленное на минимизацию угла крена, а управление рулем направления переключается от минимизации угла скольжения на удержание самолета на оси взлетно-посадочной полосы по сигналам εк, отклонение от курса взлетно-посадочной полосы  и угла рыскания (ψ).
и угла рыскания (ψ).
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| US 11928977 B2, 12.03.2024 | |||
| US 10384800 B2, 20.08.2019. | |||

