Изобретение относится к области радиотехники, в частности, к способам и устройствам временной синхронизации широкополосного сигнала (ШПС) в системах радиосвязи и сотовых системах связи множественного доступа с кодовым разделением каналов (Code Division Multiple Access - CDMA).
Известно, что системы слежения за временной задержкой ШПС в любой цифровой системе связи являются обязательными элементами, без которых невозможна обработка входного сигнала. При этом качество выделяемой информации непосредственно зависит от точности оценки временной задержки ШПС и степени ее близости к истинному значению. Величина возможной ошибки зависит, как правило, от нестабильности частоты опорных генераторов приемника и передатчика и от свойств канала распространения, например, от динамики изменения задержки сигнала за счет перемещения мобильного абонента.
В силу данных причин возникает необходимость обеспечения высокоточной (прецизионной) оценки временной задержки входного ШПС и соответствующей ее коррекции (компенсации) в приемнике системы связи.
Оценка временной задержки ШПС обычно выполняется с использованием корреляционной обработки или согласованной фильтрации [1].
Временное слежение в системах цифровой радиосвязи реализуется на основе формирования оценки относительной временной ошибки синхронизации входного и опорного сигналов и последующей ее коррекции. Для формирования оценки временной ошибки обычно используются две последовательные процедуры. На первом этапе выполняют процедуру поиска временного положения (оценку) начала ШПС с требуемой точностью. На втором этапе пошагово формируют оценку ошибки временной задержки между входным и опорным сигналом, используя которую выполняют собственно процедуру временной синхронизации.
Для формирования оценки временной ошибки часто используют временной дискриминатор, оценивающий производную взаимной корреляционной функции входного и опорного сигналов.
При практической реализации системы слежения за временной задержкой возникает ряд дополнительных проблем, решение которых связано с поиском компромисса между сложностью технической реализации, точностью и динамическими характеристиками режима слежения. Кроме того, система слежения за временной задержкой является, как правило, системой автоматического управления с обратной связью. Поэтому одновременно возникает необходимость решать проблему устойчивости.
Решению задачи временной синхронизации уделяется достаточно большое внимание в работах [2, 3, 4, 5, 6, 7, 8].
Типичный вариант выполнения цифрового устройства слежения за временной задержкой сигнала и алгоритм его реализации рассмотрен в монографии Витерби [6]. В данном устройстве используется слежение за задержкой типа «опережение-запаздывание», которое работает недостаточно эффективно вследствие постоянного колебания временной позиции демодулятора вокруг истинной временной позиции принимаемого сигнала. Кроме того, недостатком такого способа является медленное вхождение в режим синхронизма и низкая устойчивость используемого алгоритма синхронизации.
Наиболее близким аналогом (прототипом) по технической сущности к предлагаемому является способ слежения за временной задержкой сигнала и устройство для его реализации, описанные в патенте [9].
Данный способ слежения за временной задержкой известного широкополосного сигнала выполняется в два этапа. На первом этапе осуществляют начальный поиск временной позиции сигнала, при этом:
- осуществляют оценку временной задержки входного сигнала относительно опорного сигнала τ0 с точностью до половины чипа (элементарного символа) псевдослучайной последовательности, равного τu;
- формируют опорный сигнал, соответствующий временной задержке τ0 и дополнительные опорные сигналы в точках интервала задержек [τ0-Kτu, τ0+Kτu] для K=0,25; 0,5, то есть с шагом 0,25 τu;
- вычисляют значения взаимно корреляционной функции входного сигнала и опорного сигнала в сформированных моментах времени интервала задержек опорного сигнала;
- по вычисленным значениям взаимно корреляционной функции, используя процедуру интерполяции, формируют непрерывную взаимно корреляционную функцию входного и опорного сигнала в интервале временных задержек [τ0-0,5 τu, τ0+0,5 τu];
определяют временную позицию τ1, соответствующую максимальному значению сформированной непрерывной взаимно корреляционной функции и, таким образом, получают уточненную оценку начального временного положения входного ШПС;
- далее, на втором этапе, в течение всего времени приема сигнала:
- формируют опорные сигналы, соответствующие временным позициям τ1, τ1-L⋅K⋅τu и τ1+L⋅K⋅τu, где L - коэффициент поправки апертуры временного дискриминатора, L меньше единицы;
- вычисляют взаимно корреляционную функцию входного и опорных сигналов, формируя, таким образом, оценку взаимной корреляционной функции в моменты времени τ1, τ1-L⋅K⋅τu и τ1+L⋅K⋅τu;
- определяют максимальное значение из вычисленных оценок взаимной корреляционной функции, при этом:
- если максимальное значение взаимной корреляционной функции окажется во временной позиции τ1-L⋅K⋅τu, то корректируют временную позицию τ1 на величину - М⋅L⋅K⋅τu, где М меньше или равно единице и является коэффициентом, характеризующим величину шага подстройки временной задержки опорного сигнала;
- если максимальное значение взаимной корреляционной функции окажется во временной позиции τ1+L⋅K⋅τu, то корректируют временную позицию τ1 на величину М⋅L⋅K⋅τu;
- если максимальное значение взаимной корреляционной функции окажется во временной позиции τ1, то временную позицию τ1 не корректируют.
Описание заявляемого способа поясняется графическими материалами. На фиг. 1 представлена блок-схема устройства для реализации предлагаемого способа. На фиг. 2 представлена блок-схема отдельного квадратурного коррелятора.
Недостатками способа-прототипа являются: ограниченная точность оценки временной расстройки между входным широкополосным сигналом и сигналом опорного генератора, длительный переходный процесс компенсации временной расстройки, отсутствие режима адаптивной, инвариантной к внешним нестационарным условиям обработки входного ШПС.
Наличие данных недостатков в способе-прототипе можно объяснить следующим образом.
Во-первых, из-за того, что на каждом этапе процедуры временной синхронизации точность, значение и скорость подстройки определяются величиной шага (дискрета) коррекции, который согласно описанию задается субъективно из технических соображений как наиболее приемлемый. При таком подходе выбор значения данного параметра не является оптимальным и инвариантным к произвольной текущей величине временной расстройки. Часто размер шага (дискрета) коррекции необоснованно назначается гораздо меньшим или большим, чем его истинное значение. Это приводит к значительному искажению динамических характеристик системы временной синхронизации.
Отметим, что на первом этапе поиска в способе-прототипе получают уточненную оценку начального временного положения и задержки входного ШПС τ1 за счет реализации процедуры интерполяции. На последующих шагах, в режиме собственно синхронизации, эта процедура не используется. По этой причине при осуществлении процедуры синхронизации уменьшается точность оценки ошибки временной расстройки и не выполняется адаптивный выбор размера шага подстройки. Это приводит при коррекции текущей временной расстройки к дополнительной ошибке. С другой стороны, время переходного процесса в устройстве непосредственно определяется выбранным размером шага (дискрета) коррекции и суммарным числом шагов подстройки при выполнении процедуры синхронизации.
Во-вторых, при обработке не оценивается и не корректируется влияние нестационарности (стохастического характера) входного ШПС. Вследствие этого при обработке используется неадекватное сжатие апертуры дискриминационной характеристики (ДХ), которое не обеспечивает соответствующее качество оценки сигнала ошибки для коррекции текущей временной расстройки. К этому приводит несоответствие величины интервала времени анализа и величины интервала стационарности входного процесса.
Задача, на решение которой направлен заявляемый способ слежения за временной задержкой широкополосного сигнала - это ускорение переходного процесса режима временной синхронизации, повышение точности компенсации расстройки временной задержки между входным ШПС и сигналом опорного генератора, обеспечение инвариантности к нестационарному характеру входного процесса и уменьшение аппаратных и программных затрат.
Для решения поставленной задачи в способе высокоточного слежения за временной задержкой широкополосного сигнала (ШПС), включающем два этапа, на первом этапе осуществляют начальный поиск временной позиции входного широкополосного сигнала, при этом:
- осуществляют оценку временной задержки входного ШПС относительно опорного сигнала с точностью до половины чипа  (элементарного символа) псевдослучайной последовательности, для этого:
(элементарного символа) псевдослучайной последовательности, для этого:
- выполняют процедуру начального поиска временной позиции входного ШПС;
- формируют опорный сигнал, соответствующий временной задержке τ0 и дополнительные опорные сигналы в точках интервала задержек τk, количество которых достаточно для получения оптимальной оценки временной задержки входного ШПС;
- вычисляют значения взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных моментах времени интервала задержек опорного сигнала;
- по найденному значению максимума взаимно корреляционной функции и его временного положения τ0 и двум соседним значениям взаимно корреляционных функций и их временным положениям, применяя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного ШПС и опорного сигнала;
- определяют временную позицию τ1, соответствующую максимальному значению сформированной непрерывной взаимно корреляционной функции и, таким образом, получают уточненную оценку начального временного положения входного ШПС;
- на втором этапе, в течение всего времени приема сигнала:
- формируют опорные сигналы симметрично относительно уточненной временной позиции τ1 во всех временных позициях τk текущего интервала анализа, количество которых достаточно для получения оптимальной оценки временной задержки входного ШПС;
- вычисляют оценку взаимно корреляционных функций входного ШПС и опорного сигнала в сформированных временных позициях τk текущего интервала анализа;
- на текущем интервале анализа определяют значение максимума взаимно корреляционной функции и соответствующее ему временное положение позиции τk max; согласно изобретению
- определяют временную позицию входного ШПС τ1 близкую к оптимальной в длительностях минимального шага Δτmin при выполнении алгоритма высокоточной оценки временного положения радиосигнала;
- на первом этапе предварительно формируют минимальный шаг дискретизации значения временной задержки Δτmin, обеспечивающий требуемую точность представления значения временной позиции входного ШПС;
- на втором этапе, на каждом последующем шаге процедуры временной синхронизации в течение всего времени приема сигнала формируют опорные сигналы с учетом рабочего интервала стационарности входного процесса;
- дополнительно запоминают значения двух соседних взаимно корреляционных функций и их временные положения τ(k max-1) и τ(k max+1) на текущем интервале анализа, расположенные справа и слева относительно временного положения τk max максимальной взаимно корреляционной функции;
- на текущем интервале анализа по найденному значению максимума взаимно корреляционной функции, ее временному положению τk max и двум соседним значениям взаимно корреляционных функций и их временным положениям τ(k max-1) и τ(k max+1), применяя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного ШПС и опорного сигнала;
- выполняя алгоритм высокоточной оценки временного положения радиосигнала, определяют уточненную оценку временной позиции τ1 входного ШПС в длительностях минимального шага Δτmin, соответствующую временной позиции максимального значения сформированной непрерывной взаимно корреляционной функции на текущем интервале анализа;
- полученную на текущем шаге анализа уточненную оценку временной позиции входного ШПС τ1, используют для коррекции временного положения опорного сигнала на следующем шаге анализа путем замены временной позиции опорного сигнала текущего шага на полученную уточненную оценку временной позиции τ1;
- относительно полученной уточненной оценки временной позиции τ1 формируют следующий интервал анализа и осуществляют все операции, выполненные на предыдущем шаге анализа второго этапа.
Поставленная задача решается методом максимального правдоподобия [10] в условиях ограничения спектра входного ШПС с использованием итеративного алгоритма высокоточной оценки временного положения ШПС, разработанного в [11, 12]. По ходу разработки данного интерполяционного алгоритма высокоточной оценки временного положения ШПС была выполнена оптимизация его параметров. Показано, что уже при числе дискретов выходного сигнала приемника на длительности элементарного символа (чипа) ПСП, не менее трех, проигрыш интерполяционного алгоритма оптимальному алгоритму максимального правдоподобия становится несущественным. В то же время предложенный алгоритм значительно проще в реализации оптимального алгоритма максимального правдоподобия и требует меньших аппаратных и программных затрат.
Дополнительно для обеспечения инвариантности процедуры временной синхронизации к характеру нестационарности входного процесса рекомендуется учитывать причины, порождающие данное поведение ШПС. К основным причинам можно отнести, например, нестабильность частоты тактовых генераторов приемника и передатчика и эффект Доплера в канале связи.
Так же следует заметить, что для адекватной технической реализации предлагаемого способа высокоточного слежения за временной задержкой широкополосного сигнала разумно выполнить предварительный выбор необходимых рабочих параметров системы, например:
- минимальный шаг дискретизации - число дискретов на длительности элементарного символа (чипа) ПСП τu, обеспечивающий требуемую точность представления значения временной позиции входного ШПС системы временной синхронизации (например, при дискрете в 1/32 длительности чипа ПСП потери в точности представления значения взаимно корреляционной функции составляют менее одного процента);
- шаг дискретизации длительности элементарного символа (чипа) ПСП в процессе выполнения процедуры слежения, обеспечивающий сканирование с гарантировано высоким разрешением (например, при дискрете длительности чипа τu ПСП Δτ=τu/N, где N≥3 проигрыш предлагаемого интерполяционного алгоритма в точности оценки временного положения ШПС оптимальному алгоритму максимального правдоподобия становится несущественным);
- интервал стационарности входного случайного процесса, который задается в соответствие с техническими требованиями или на основе мониторинга и оценки параметров канала передачи ШПС.
Предлагаемый способ высокоточного слежения за временной задержкой широкополосного сигнала реализуют аналогично способу-прототипу в два этапа. На первом этапе осуществляют начальный поиск временной позиции входного широкополосного сигнала, при этом:
- предварительно формируют минимальный шаг дискретизации значения временной задержки Δτmin, обеспечивающий требуемую точность представления значения временной позиции входного ШПС;
- осуществляют оценку временной задержки входного ШПС относительно опорного сигнала с точностью до половины чипа τu/2 (элементарного символа) псевдослучайной последовательности, для этого:
- выполняют процедуру начального поиска временной позиции входного ШПС, следующим образом:
- формируют опорный сигнал во всех временных позициях заданного априорного интервала возможных значений временного положения входного ШПС, кратных τu/2;
вычисляют значения взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных временных позициях опорного сигнала;
из вычисленных значений взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных временных позициях заданного априорного интервала возможных значений временного положения входного ШПС, определяют временное положение τ0, соответствующее максимальному значению взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала с точностью до половины чипа (элементарного символа) псевдослучайной последовательности;
- формируют опорный сигнал, соответствующий временной задержке τ0, и дополнительные опорные сигналы в точках интервала задержек τk, количество которых достаточно для учета рабочего интервала стационарности входного процесса и получения оптимальной оценки временной задержки входного ШПС;
- вычисляют значения взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных моментах времени интервала задержек опорного сигнала;
- по найденному значению максимума взаимно корреляционной функции и его временного положения τ0 и двум соседним значениям взаимно корреляционных функций и их временным положениям, применяя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного ШПС и опорного сигнала;
- выполняя алгоритм высокоточной оценки временного положения радиосигнала [11, 12], определяют в длительностях минимального шага Δτmin близкую к оптимальной временную позицию τ1, соответствующую максимальному значению сформированной непрерывной взаимно корреляционной функции и, таким образом, получают уточненную оценку начального временного положения входного ШПС;
- далее, на втором этапе, на каждом последующем шаге процедуры временной синхронизации в течение всего времени приема сигнала:
- симметрично относительно уточненной временной позиции τ1 формируют опорные сигналы во всех временных позициях τk текущего интервала анализа, количество которых достаточно для учета рабочего интервала стационарности входного процесса и получения оптимальной оценки временной задержки входного ШПС;
- вычисляют оценку взаимно корреляционных функций входного ШПС и опорного сигнала в сформированных временных позициях τk текущего интервала анализа
- на текущем интервале анализа определяют значение максимума взаимно корреляционной функции и соответствующее ему временное положение позиции τk max;
- дополнительно запоминают значения двух соседних взаимно корреляционных функций и их временные положения τ(k max-1) и τ(k max+1) на текущем интервале анализа, расположенные справа и слева относительно временного положения τk max максимальной взаимно корреляционной функции;
- на текущем интервале анализа по найденному значению максимума взаимно корреляционной функции, ее временному положению τk max и двум соседним значениям взаимно корреляционных функций и их временным положениям τ(k max-1) и τ(k max+1), применяя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного ШПС и опорного сигнала;
- выполняя алгоритм высокоточной оценки временного положения радиосигнала [11, 12], определяют уточненную оценку временной позиции τ1 входного ШПС в длительностях минимального шага Δτmin, соответствующую временной позиции максимального значения сформированной непрерывной взаимно корреляционной функции на текущем интервале анализа;
- полученную на текущем шаге анализа уточненную оценку временной позиции входного ШПС τ1, используют для коррекции временного положения опорного сигнала на следующем шаге анализа (синхронизации) путем замены временной позиции опорного сигнала текущего шага на полученную уточненную оценку временной позиции τ1;
- относительно полученной уточненной оценки временной позиции τ1 формируют следующий интервал анализа и осуществляют все операции, выполненные на предыдущем шаге анализа второго этапа.
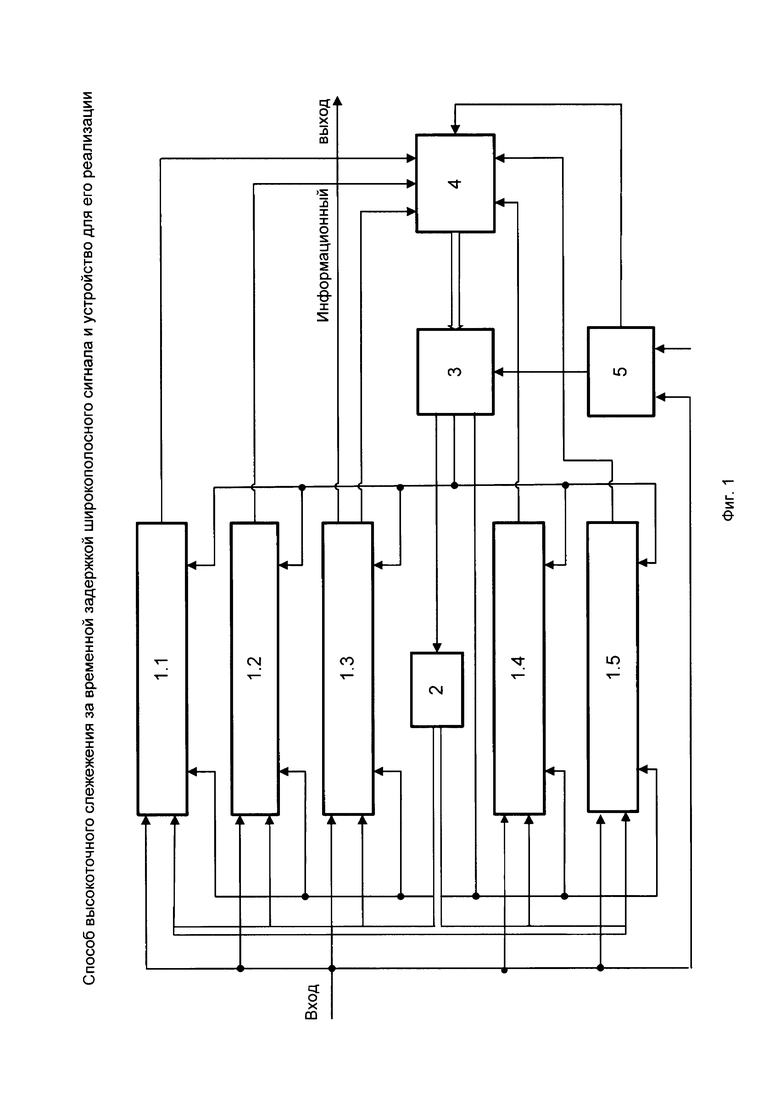
Блок-схема устройства, реализующего предлагаемый способ высокоточного слежения за временной задержкой широкополосного сигнала, представлена на фиг. 1, где введены следующие обозначения:
1.1 - 1.5 - с первого по пятый квадратурные корреляторы;
2 - генератор псевдослучайных последовательностей;
3 - блок управления;
4 - блок выбора и управления режимом обработки входного ШПС;
5 - блок мониторинга и выбора рабочих параметров.
Устройство, реализующее предлагаемый способ высокоточного слежения за временной задержкой широкополосного сигнала (фиг. 1), содержит генератор псевдослучайных последовательностей 2, блок управления 3 и, по крайней мере, не менее пяти параллельных ветвей обработки, каждая из которых состоит из соответствующих идентичных квадратурных корреляторов 1.1 - 1.5. Дополнительно в устройство введены блок выбора и управления режимом обработки входного ШПС 4 и блок мониторинга и выбора рабочих параметров 5.
При этом первые входы всех квадратурных корреляторов объединены и подсоединены шиной к выходу генератора ПСП 2, вход которого подсоединен к соответствующему выходу блока управления 3, а его два других выхода соединены с соответствующими входами объединенных между собой соответственно третьими и четвертыми входами квадратурных корреляторов 1.1 - 1.5, выходы которых соединены с соответствующими входами блока выбора и управления режимом обработки входного ШПС 4, выход которого шиной соединен с первым входом блока управления 3. Кроме того, первый и второй выходы блока мониторинга и выбора рабочих параметров 5 соединены соответственно с вторым входом блока управления 3 и с соответствующим входом блока выбора и управления режимом обработки входного ШПС 4. Причем первый вход блока мониторинга и выбора рабочих параметров 5 соединен с объединенными вторыми входами квадратурных корреляторов 1.1 - 1.5 и является входом устройства. Второй вход блока мониторинга и выбора рабочих параметров 5 является управляющим входом. Кроме того, второй выход третьего квадратурного коррелятора 1.3 является информационным выходом устройства.
Квадратурные корреляторы 1.1 - 1.5 идентичны, блок-схема первого квадратурного коррелятора 1.1 представлена на фиг. 2, где обозначено:
1.1.1 - перемножитель;
1.1.2 - первый сумматор со сбросом;
1.1.3 - квадратор;
1.1.4 - второй сумматор со сбросом.
При этом первый квадратурный коррелятор 1.1 содержит последовательно соединенные перемножитель 1.1.1, первый сумматор со сбросом 1.1.2, квадратор 1.1.3 и второй сумматор со сбросом 1.1.4, выход которого является выходом квадратурного коррелятора 1.1. Причем первый и второй входы перемножителя 1.1.1 являются соответственно первым и вторым входами квадратурного коррелятора 1.1. Второй вход первого сумматора со сбросом 1.1.2 является третьим входом квадратурного коррелятора 1.1, а четвертый вход квадратурного коррелятора 1.1 - вторым входом второго сумматора со сбросом 1.1.4. Структурная схема и работа квадратурного коррелятора представлена в [9].
Работает устройство, реализующее способ высокоточного слежения за временной задержкой широкополосного сигнала, следующим образом.
Процедура временной синхронизации в предлагаемом устройстве реализуется в два этапа. На первом этапе осуществляют поиск начального временного положения входного ШПС относительно опорного сигнала для всего интервала априорной неопределенности возможных значений временного положения входного ШПС, а на втором этапе выполняют собственно процедуру временной синхронизации. Прежде всего, со значительной степенью вероятности можно утверждать, что из технических соображений для подавляющего большинства реальных условий передачи в канале связи и возможной нестабильности параметров устройства, ошибка оценки текущего значения временного положения входного ШПС, как правило, находится в рамках ±τu/2 относительно опорной ПСП. Из этих соображений можно утверждать, что для оптимальной оценки временного положения входного ШПС [11, 12] достаточно использовать группу из пяти параллельных ветвей обработки с шагом в четверть чипа, N=4. Число ветвей обработки в большей степени критично для уменьшения длительности поиска первого этапа синхронизации при выполнении оценки начального временного положения входного ШПС.
Предварительно в блоке выбора и управления режимом обработки входного ШПС 4 формируют минимальный шаг Δτmin для представления (дискретизации) значения временной задержки, обеспечивающий требуемую точность отображения значения временной позиции входного ШПС.
В процессе выполнения процедуры временной синхронизации на вторые входы квадратурных корреляторов 1.1 - 1.5 каждой ветви обработки подается известный входной ШПС с неизвестной временной задержкой. Одновременно на первые входы квадратурных корреляторов 1.1 - 1.5 с выхода генератора псевдослучайных последовательностей 2 подаются соответствующие опорные ПСП. Временные позиции опорной ПСП в соседних ветвях обработки сдвинуты относительно друг друга на половину чипа ПСП и устанавливаются в соответствии с сигналом управления с выхода блока управления 3, алгоритм работы которого назначается блоком выбора и управления режимом обработки входного ШПС 4 и блоком мониторинга и выбора рабочих параметров 5. На первом этапе процедура поиска временного положения входного ШПС выполняется для всего априорного интервала неопределенности возможных значений временного положения входного ШПС. Чаще всего для реализации этой процедуры используют алгоритм параллельно-последовательного поиска [1, 4, 13, 14], параметры которого обеспечивают максимальную скорость обработки и минимальные аппаратные и вычислительные затраты ресурсов устройства.
В предлагаемом устройстве данную задачу решают совместно блок управления 3, блок выбора и управления режимом обработки входного ШПС 4 и блок мониторинга и выбора рабочих параметров 5.
Во временных позициях всего интервала априорной неопределенности выполняется сравнение значений взаимно корреляционной функции, которые формируются на выходах квадратурных корреляторов 1.1 - 1.5 соответствующих ветвей обработки. По результатам сравнения в блоке выбора и управления режимом обработки входного ШПС 4 выносится решение о величине и временном положении максимума ВКФ τ0, соответствующем временной позиции входного ШПС в единицах, кратных половине чипа сигнала опорной ПСП (τu/2). Одновременно запоминают значения соседних ВКФ и их временные позиции, расположенные справа и слева от временной позиции максимума ВКФ. По найденным значениям максимума взаимно корреляционной функции и его временного положения τ0, двум соседним значениям взаимно корреляционных функций и их временным положениям в блоке выбора и управления режимом обработки входного ШПС 4, используя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного и опорного сигнала. Используя процедуру итеративного алгоритма высокоточной оценки временного положения ШПС [11, 12], в блоке выбора и управления режимом обработки входного ШПС 4 определяют временную позицию τ1, соответствующую максимальному значению сформированной непрерывной взаимно корреляционной функции в длительностях минимального шага Δτmin, и, таким образом, получают уточненную, близкую к оптимальной, оценку начального временного положения входного ШПС. Далее в блоке выбора и управления режимом обработки входного ШПС 4 вырабатывают сигнал управления начала второго этапа, по которому осуществляют последовательную пошаговую процедуру синхронизации. При этом на каждом последующем шаге подстроки: в генераторе псевдослучайных последовательностей 2 формируют опорные сигналы во всех временных позициях τk текущего интервала анализа τ∈[τ1-τu/2, τ1+τг/2], включающего опорный сигнал на временной позиции τ1, представленный в длительностях минимального шага Δτmin, то есть τk=(τk-τu/2)+k⋅τu/N, где k=0,1, …, N, в данном случае N=4. В соответствии с оценкой параметров канала или управляющего входного сигнала на выходе блока мониторинга и выбора рабочих параметров 5 в блоке управления 3 формируют соответствующие сигналы сброса первых и вторых сумматоров со сбросом 1.1.2, 1.2.2, 1.3.2, 1.4.2, 1.5.2, 1.1.4, 1.2.4, 1.3.4; 1.4.4, 1.5.4; на выходах вторых сумматоров со сбросом 1.1.4, 1.2.4, 1.3.4, 1.4.4.,1.5.4, вычисляют оценку взаимно корреляционных функций входного ШПС и опорного сигнала на сформированных временных позициях τk текущего интервала анализа; в блоке выбора и управления режимом обработки входного ШПС 4 на текущем интервале анализа определяют значение максимума взаимно корреляционной функции и соответствующее ему временное положение позиции τk max; дополнительно запоминают значения двух соседних взаимно корреляционных функций и их временные положения τ(k max-1) и τ(k max+1) на интервале анализа, расположенные справа и слева относительно временной позиции максимальной взаимно корреляционной функции; по найденному значению максимума взаимно корреляционной функции и ее временному положению τk max и двум соседним значениям взаимно корреляционных функций и их временным положениям τ(max-1) и τ(max+1), применяя квадратичную интерполяцию, формируют непрерывную взаимно корреляционную функцию входного и опорного сигнала; используя процедуру итеративного алгоритма высокоточной оценки временного положения ШПС [11, 12] определяют уточненную оценку временной позиции, соответствующую максимальному значению сформированной на текущем шаге непрерывной взаимно корреляционной функции τk max в длительностях минимального шага Δτmin и, таким образом, получают близкую к оптимальной оценку временного положения входного ШПС; полученную на текущем шаге уточненную оценку временной позиции входного ШПС, соответствующую максимальному значению взаимно корреляционной функции τk max, используют для коррекции временного положения опорного сигнала для следующего шага синхронизации путем замены временной позиции опорного сигнала τ1 текущего шага на полученную на текущем шаге уточненную оценку временной позиции.
Принципы построения устройства, допустимость программной реализации алгоритмов и цифровой обработки сигналов в блоке управления 3, блоке выбора и управления режимом обработки входного ШПС 4 и блоке мониторинга и выбора рабочих параметров 5 дают возможность для их реализации применять высокопроизводительные, гибко перепрограммируемые специализированные цифровые сигнальные процессоры (digital signal processor (DSP)) и быстродействующие программируемые логические интегральные схемы (ПЛИС, Field Programmable Gate Array (FPGA)), например, типов 1892BM3E (Multicore), 1892 ВМ10Я (NVcom) и FPGAs, Virtex-7 и их перспективные версии.
Мониторинг внешних условий и выбор рабочих параметров системы слежения выполняется в блоке 5, как правило, по результатам оценки комплексной огибающей входного ШПС. Следует отметить, что в системах CDMA оценка канала является обязательной процедурой, которую часто выполняют по непрерывному пилот сигналу. Существует широкий перечень алгоритмов оценки канала в системах CDMA по непрерывному пилот-сигналу, представленных, например, в [15, 16, 17, 18]. В силу идентичности структуры входного ШПС в предлагаемой системе слежения за временной задержкой и пилот-сигнала в системах CDMA можно использовать данные алгоритмы оценки канала [15-18] в блоке мониторинга и выбора рабочих параметров 5. По полученным результатам формируют сигналы оптимального адаптивного управления параметрами рассматриваемой системы для обеспечения инвариантности к внешним условиям.
В изобретении осуществлена двухэтапная модифицированная оценка временного положения ШПС. При этом использование итерполяционного алгоритма высокоточной оценки временного положения ШПС на обоих этапах и адаптивного выбора оптимальных параметров системы синхронизации с учетом оценки канала приводят к сокращению времени переходного процесса в режим синхронизма, увеличению точности оценки, обеспечению инвариантности к условиям передачи входного ШПС и сокращению затрат на их реализацию. Перечисленные признаки заявляемого способа высокоточного слежения за временной задержкой широкополосного сигнала имеют существенные отличия от аналогов, обнаруженных при поиске из известного уровня техники, следовательно, заявляемое решение удовлетворяет условию патентоспособности изобретения «новизна».
Анализ уровня техники на соответствие заявляемого решения условию патентоспособности изобретения «изобретательский уровень» показал, что известные технические решения не позволяют обеспечить требуемый уровень точности оценки временной задержки ШПС и степень ее близости к истинному значению.
В то же время заявляемый способ за счет повышения качества временной синхронизации увеличивает помехоустойчивость системы связи, поэтому можно сделать вывод, что представленное техническое решение отвечает условию патентоспособности «изобретательский уровень».
Предлагаемое техническое решение позволяет решать проблему увеличения скорости переходного процесса в режиме временной синхронизации при одновременном повышении точности оценки ошибки временной расстройки и повышении помехозащищенности системы.
Литература
1. Варакин Л.Е. Системы связи с шумоподобными сигналами / Л.Е. Варакин. - М: Радио и связь, 1985. - 384 с., С. 225-231.
2. Спилкер Дж. Цифровая спутниковая связь / Дж. Спилкер; пер. с англ. под ред. В.В. Маркова. - М.: Связь, 1979. - 592 с.
3. Цифровые радиоприемные системы. Справочник / М.И. Жодзишский, Р.Б. Мазепа, Е.П. Овсянников и др. / Под ред. М.И. Жодзишского. - М.: Радио и связь, 1990. - 208 с.
4. Журавлев В.И. Поиск и синхронизация в широкополосных системах / В.И. Журавлев. - М.: Радио и связь, 1986. - 240 с.
5. Свириденко С.С. Основы синхронизации при приеме дискретных сигналов / С.С. Свириденко. - М.: Связь, 1974. - 144 с.
6. Принципы широкополосной связи. Andrew J.Viterbi. "CDMA. Principles of Spread Spectrum Communication". Addison-Wesley Wireless Communications Series, p. 60, fig.3.6, 1995.
7. Дж. Дж. Олмос, P. Агусти. "Анализ и проектирование схемы слежения за задержкой второго порядка в системе CDMA", J.J. Olmos, R. Agusti. Analysis and design of the second order delay-lock loop in a CDMA system. IEEE 0-7803-0673-2/92, 1992, C. 221-224.
8. A. Gonzalez, B. Ruiz, M.I. Lopez, C. Valdeolmillos. Simulation of a second order delay locked loop ib multipath environment.IEEE 0-7803-1266-X/93.
9. Патент RU 2157593 C1, H04L 7/02, H04B 1/10.
10. Куликов Е.И. Оценка параметров сигналов на фоне помех / Е.И. Куликов, А.П. Трифонов. - М: Сов. радио, 1978. - 296 с.
11. Манелис В.Б. Сергиенко А.И. Высокоточная оценка временного положения радиосигнала / В.Б. Манелис, А.И. Сергиенко // Изв. ВУЗов. Радиоэлектроника. 2008. - Т. 51, №2. - С. 64-69.
12. Манелис В.Б. Интерполяционная оценка временного положения радиосигнала / В.Б. Манелис, А.И. Сергиенко // Радиолокация, навигация, связь: тр. XIII международ, науч.-техн. конф. - Воронеж, 2007. - Т. 2. - С. 1003-1009.
13. Don Torrieri. Principles of SPREAD-SPECTRUM COMMUNICATION SYSTEMS. - Springer-Business Media, Inc Boston, 2005. - p. 444.
14. Лосев В.В., Бродская Е.Б., Коржик В.И. Поиск и декодирование сложных дискретных сигналов / Под ред. В.И. Коржика. - М.: Радио и связь, 1988. - 224 с.
15. Abeta S. Performance comparison between time-multiplexed pilot channel and parallel pilot channel for coherent rake combining in DS-CDMA mobile Radio / S. Abeta, M. Sawahashi, F. Adachi // IEICE Trans. Commun. - July, 1998. - Vol. E81-B. - №7. - P. 1417-1425.
16. Abeta S. Adaptive channel estimation for coherent DS-CDMA mobile radio using time-multiplexed pilot and parallel pilot structures / S. Abeta, M. Sawahashi, F. Adachi // IEICE Trans. Commun. - Sept., 1999. - Vol. E82-B. - №9. - P. 1505-1513.
17. Гармонов A.B. Восстановление параметров несущей сигналов с кодовым разделением каналов / А.В. Гармонов, И.В. Каюков, В.Б. Манелис // Теория и техника радиосвязи. - 2000. - вып. 1. - С. 26-32.
18. Квазикогерентный прием фазоманипулированного сигнала в системах CDMA / А.В. Гармонов, Ю.Е. Карпитский, И.В. Каюков, В.Б. Манелис // Радиолокация, навигация, связь: Доклады 5 международной научно-технической конференции. - Воронеж, 1999. - Т 1. - С. 305-313.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоточной оценки несущей частоты сигнала в широкополосных системах связи | 2018 |
|
RU2691972C1 |
| Способ синхронизации сигнала в многоканальных радиоприемных устройствах | 2021 |
|
RU2769381C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ОПОРНОГО СИГНАЛА ВЫЧИСЛИТЕЛЬНЫМИ СРЕДСТВАМИ В СИСТЕМАХ ЧАСТОТНОЙ И ФАЗОВОЙ СИНХРОНИЗАЦИИ ШИРОКОПОЛОСНЫХ СИСТЕМ СВЯЗИ | 2013 |
|
RU2535198C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ВРЕМЕННОЙ ЗАДЕРЖКОЙ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157593C1 |
| Устройство высокоточной оценки несущей частоты сигнала в широкополосных системах связи | 2018 |
|
RU2691380C1 |
| СПОСОБ ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2007 |
|
RU2353064C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА | 2000 |
|
RU2168274C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1998 |
|
RU2153701C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ И НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО СИГНАЛАМ РАДИОИЗЛУЧЕНИЯ ИХ БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2599984C1 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
Изобретение относится к области радиотехники, в частности к способам и устройствам временной синхронизации широкополосного сигнала (ШПС) в системах радиосвязи и сотовых системах связи множественного доступа с кодовым разделением каналов (Code Division Multiple Access - CDMA). Технический результат - ускорение переходного процесса режима временной синхронизации, повышение точности компенсации расстройки временной задержки между входным ШПС и сигналом опорного генератора, обеспечение инвариантности к нестационарному характеру входного процесса и уменьшение аппаратных и программных затрат. Для достижения технического результата в способ включена двухэтапная модифицированная оценка временного положения ШПС с использованием на каждом этапе итеративного алгоритма высокоточной оценки временного положения ШПС и процедуры адаптивного выбора оптимальных параметров управления системой синхронизации с учетом оценки канала. 1 з.п. ф-лы, 1 ил.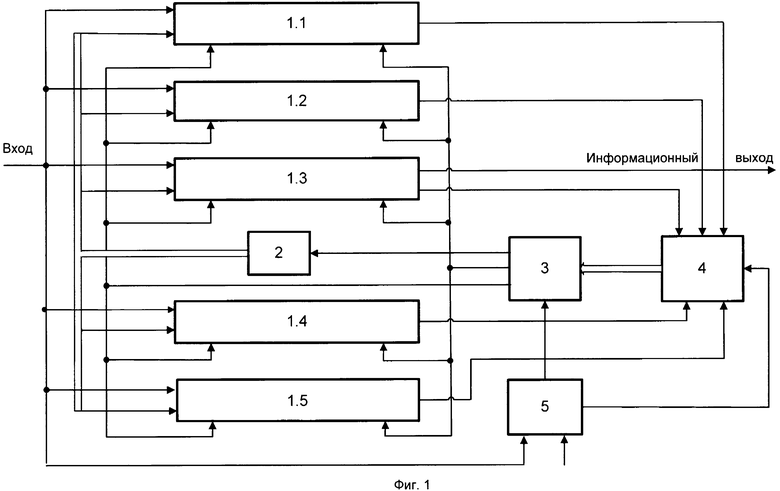
1. Способ высокоточного слежения за временной задержкой широкополосного сигнала (ШПС), включающий два этапа, на первом этапе осуществляют начальный поиск временной позиции входного широкополосного сигнала, при этом:
- осуществляют оценку временной задержки входного ШПС относительно опорного сигнала с точностью до половины чипа τu/2 (элементарного символа) псевдослучайной последовательности, для этого:
- выполняют процедуру начального поиска временной позиции входного ШПС;
- формируют опорный сигнал, соответствующий временной задержке τ0 и дополнительные опорные сигналы в точках интервала задержек τk, количество которых достаточно для получения оптимальной оценки временной задержки входного ШПС;
- вычисляют значения взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных моментах времени интервала задержек опорного сигнала;
- по найденному значению максимума взаимно корреляционной функции и его временного положения τ0 и двум соседним значениям взаимно корреляционных функций и их временным положениям, применяя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного ШПС и опорного сигнала;
- определяют временную позицию τ1, соответствующую максимальному значению сформированной непрерывной взаимно корреляционной функции и, таким образом, получают уточненную оценку начального временного положения входного ШПС;
на втором этапе, в течение всего времени приема сигнала:
- формируют опорные сигналы симметрично относительно уточненной временной позиции τ1 во всех временных позициях τk текущего интервала анализа, количество которых достаточно для получения оптимальной оценки временной задержки входного ШПС;
- вычисляют оценку взаимно корреляционных функций входного ШПС и опорного сигнала в сформированных временных позициях τk текущего интервала анализа;
- на текущем интервале анализа определяют значение максимума взаимно корреляционной функции и соответствующее ему временное положение позиции τk max, отличающийся тем, что
- определяют временную позицию входного ШПС τ1 близкую к оптимальной в длительностях минимального шага Δτmin при выполнении алгоритма высокоточной оценки временного положения радиосигнала;
- на первом этапе предварительно формируют минимальный шаг дискретизации значения временной задержки Δτmin, обеспечивающий требуемую точность представления значения временной позиции входного ШПС;
- на втором этапе, на каждом последующем шаге процедуры временной синхронизации в течение всего времени приема сигнала формируют опорные сигналы с учетом рабочего интервала стационарности входного процесса;
- дополнительно запоминают значения двух соседних взаимно корреляционных функций и их временные положения τ(k max-1) и τ(k max+1) на текущем интервале анализа, расположенные справа и слева относительно временного положения τk max максимальной взаимно корреляционной функции;
- на текущем интервале анализа по найденному значению максимума взаимно корреляционной функции, ее временному положению τk max и двум соседним значениям взаимно корреляционных функций и их временным положениям τ(k max-1) и τ(k max+1), применяя процедуру квадратичной интерполяции, формируют непрерывную взаимно корреляционную функцию входного ШПС и опорного сигнала;
- выполняя алгоритм высокоточной оценки временного положения радиосигнала, определяют уточненную оценку временной позиции τ1 входного ШПС в длительностях минимального шага Δτmin, соответствующую временной позиции максимального значения сформированной непрерывной взаимно корреляционной функции на текущем интервале анализа;
- полученную на текущем шаге анализа уточненную оценку временной позиции входного ШПС τ1 используют для коррекции временного положения опорного сигнала на следующем шаге анализа путем замены временной позиции опорного сигнала текущего шага на полученную уточненную оценку временной позиции τ1;
- относительно полученной уточненной оценки временной позиции τ1 формируют следующий интервал анализа и осуществляют все операции, выполненные на предыдущем шаге анализа второго этапа.
2. Способ по п. 1, отличающийся тем, что процедуру начального поиска временной позиции входного ШПС выполняют следующим образом:
- формируют опорный сигнал во всех временных позициях заданного априорного интервала возможных значений временного положения входного ШПС, кратных τu/2;
- вычисляют значения взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных временных позициях опорного сигнала;
- из вычисленных значений взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала в сформированных временных позициях заданного априорного интервала возможных значений временного положения входного ШПС определяют временное положение τ0, соответствующее максимальному значению взаимно корреляционной функции входного широкополосного сигнала и опорного сигнала с точностью до половины чипа псевдослучайной последовательности.
| СПОСОБ СЛЕЖЕНИЯ ЗА ВРЕМЕННОЙ ЗАДЕРЖКОЙ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157593C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2486672C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1982 |
|
SU1840565A1 |
| US 4627080 A, 02.12.1986 | |||
| US 4355398 A1, 19.10.1982 | |||
| МАНЕЛИС В.Б | |||
| и др | |||
| Высокоточная оценка временного положения радиосигнала | |||
| Изв | |||
| ВУЗов | |||
| Радиоэлектроника | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |

