ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу обработки изображения, системе обработки изображения, элементу компьютерной программы и компьютерочитаемому носителю.
УРОВЕНЬ ТЕХНИКИ
Задачей хирургии рака является удаление опухолевой ткани вместе с запасом свободной от опухоли ткани вокруг опухолевой ткани в целях надёжности. Некоторые типы рака имеют преимущественное направление роста. Например, рак молочной железы часто растёт вдоль долек, в направлении, перпендикулярном грудной мышце. Стандартной клинической практикой является удаление из молочной железы объема цилиндрической формы, проходящего от грудной мышцы к коже.
Составление отчетов о таких хирургических вмешательствах и их планирование практически полностью выполняют посредством нанесения вручную (например, при помощи фломастера) линий разреза непосредственно на коже пациента, которые затем могут быть записаны, например, посредством фотографирования. В некоторых случаях, линии разреза наносят в качестве примечаний на предварительно напечатанную бумажную форму, на которой показано общее изображение соответствующего органа. Данные линии предназначены для захвата контура или формы опухоли на виде в плане. Другими словами, формы нарисованы только в двух измерениях (как видно с одного направления обзора). Однако протяжённость в пространстве объёма, который необходимо удалить, и его ориентация в окружающей ткани не записываются в явном виде и, таким образом, должны быть мысленно представлены читателем данных отчётов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Таким образом, в уровне техники существует необходимость создания альтернативного способа и/или соответствующей системы для устранения по меньшей мере некоторых из указанных выше недостатков.
Задача настоящего изобретения решена посредством объекта изобретения, определенного в независимых пунктах формулы изобретения, причём дополнительные варианты реализации включены в зависимые пункты формулы изобретения. Следует отметить, что описанный ниже аспект изобретения в равной степени применим к системе обработки изображения, к элементу компьютерной программы и к компьютерочитаемому носителю.
Согласно первому аспекту настоящего изобретения, предложен способ обработки изображения, включающий:
приём i) объёмного изображения, ii) формы профиля и iii) кривой распространения;
распространение указанной формы профиля через объёмное изображение вдоль указанной кривой распространения для получения таким образом частичного объёма в указанном объёме; и
отображение указанного частичного объёма на устройстве отображения,
при этом объёмное изображение разделено на слои, а
распространение указанной формы профиля автоматически оканчивается на поверхности раздела между двумя слоями в объеме или частичный объём SV отсекается на указанной поверхности раздела, так что частичный объём не проходит через указанную поверхность раздела.
Это обеспечивает возможность получения частичных объёмов, которые "учитывают" внутренние структуры окружающего объёмное изображение IV посредством включения определений указанных поверхностей раздела в качестве ограничений в вычисление частичного объёма.
Согласно одному варианту реализации способ включает отображение частичного объёма вместе с указанным объёмным изображением.
Способ обеспечивает получение преимущества, заключающегося в обеспечении любого трёхмерного цифрового представления исследуемого объекта (например, молочной железы), полученного, например, посредством магнитно-резонансной томографии (МРТ) со снимками поверхности, или из персонализированных моделей. В частности, составление отчётов о хирургических процедурах, и/или их планирование могут быть выполнены более лёгким образом, в частности, могут быть получены "виртуальные", трёхмерные резекционные объёмы.
Согласно одному варианту реализации способ включает отображение объёмного изображения или по меньшей мере его части и постепенное построение отображения частичного объёма во время распространения указанной формы профиля с удалением при этом частичного объёма из указанного объёмного изображения. Это приводит к особенно выразительному представлению, так как пользователь может "наблюдать" динамику вычисления и, в частности, он может видеть или предполагать, действительно ли частичный объём покроет заданную интересующую область (ИО), например место опухоли, в объёме IV. Пользователь может видеть, даже до получения заключения на основе вычисления, будет ли частичный объём полностью содержать интересующую область, и если не будет, вычисление может быть прекращено преждевременно и запущено повторно с возможным новым направлением распространения и/или отрегулированным размером формы профиля.
Согласно одному варианту реализации способ включает вычисление размера (иными словами, числового объёма) частичного объёма и/или соотношения между частичным объёмом и указанным объёмом.
Согласно одному варианту реализации способ включает подачу сигнала, если вычисленный размер частичного объёма и/или вычисленное соотношение нарушает заданное пороговое значение.
Согласно одному варианту реализации объём содержит заданную критическую область, причём тревожный сигнал подают если указанная критическая область не полностью окружена указанным частичным объёмом или если критическая область выступает за пределы частичного объёма на величину, больше заданной. В частности, при хирургическом вмешательстве, это обеспечивает точное определение до вмешательства/до операции количества ткани, которую необходимо удалить, по отношению к окружающей ткани пациента. Ранее такие данные были доступны только после проведения операции при патологическом исследовании фактически удалённой ткани.
Согласно одному варианту реализации объёмное изображение представляет собой одно из изображения, полученного МРТ, изображения, полученного компьютерной томографией (КТ), оптического трёхмерного изображения, ультразвукового трёхмерного изображения, объёма персонализированной модели или общей объёмной модели.
Согласно одному варианту реализации форма профиля выполнена регулируемой.
Согласно одному варианту реализации форму профиля определяют автоматически в объёмном изображении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приведённые в качестве примера варианты реализации будут описаны далее со ссылкой на прилагаемые чертежи, на которых:
на фиг. 1 показана структурная схема системы обработки изображения;
на фиг. 2 показана блок-схема способа обработки изображения;
на фиг. 3 - 5 показаны приведённые в качестве примера изображения, полученные посредством способа обработки изображения по фиг. 2.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
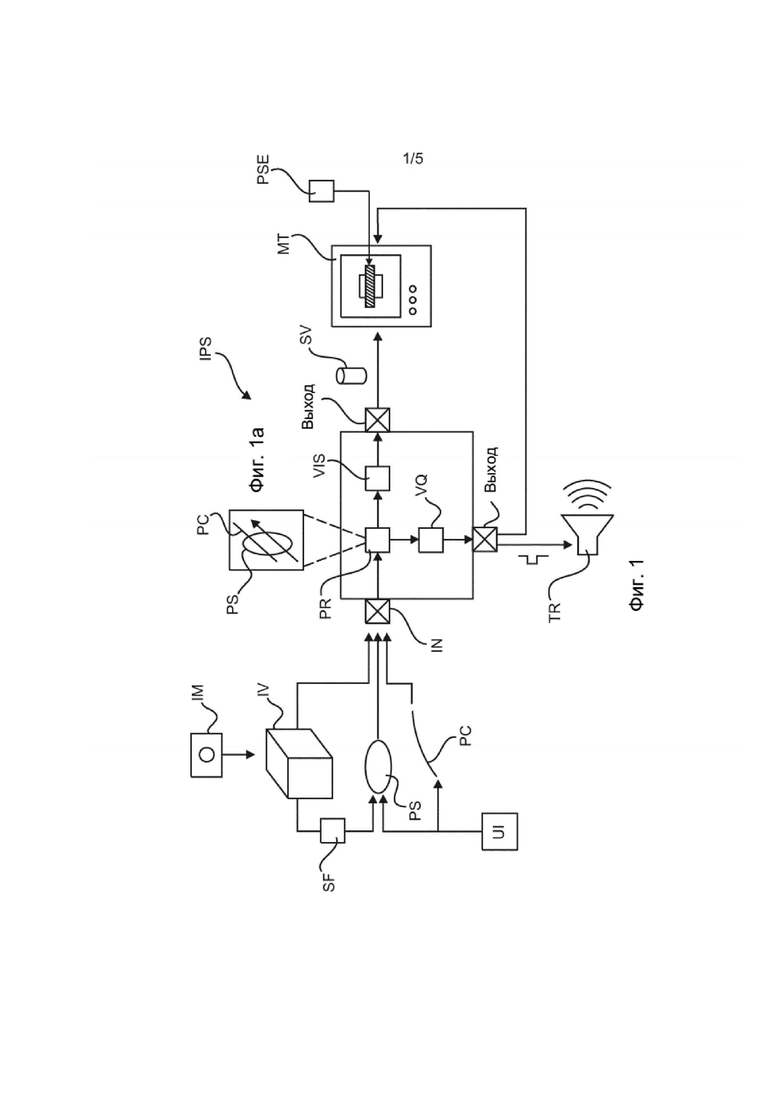
На фиг. 1 показана схематическая структурная схема системы IPS (image processing system) обработки изображения, предложенной в настоящем документе. Система IPS обработки изображения обеспечивает возможность определения частичного объёма в потенциально сложных данных IV объёмного изображения. Система IPS обработки изображения может быть использована в качестве одного примера применения в рабочих условиях при планировании хирургического вмешательства ("виртуальная хирургия"), например, при хирургии молочной железы, хотя из настоящего документа будет понятно, что предложенная система обработки изображения также может быть предпочтительно использована, например, при производственном проектировании, проектировании и/или трёхмерной печати при помощи компьютера или в любой другой области деятельности, в которой, например, в приоритете стоит требование точного определения объекта, который необходимо вырезать из окружающего материала.
В одном варианте реализации предложенная система IPS позволяет пользователю определять в интерактивном режиме частичный объём SV ткани в заданном объёмном изображении (объем) IV объекта изображения (например, молочной железы пациента). Объёмное изображение IV и частичный объём SV могут быть определены посредством сеток с треугольными ячейками, определяющих исследуемые граничные поверхности. Устройство генерирует частичный объём в качестве трёхмерной формы, которая представляет объём иссечения для хирургического вмешательства.
Трёхмерную форму частичного объёма SV генерируют с использованием определения траектории распространения (например, участок прямой линии) двумерной формы, определённой пользователем или вычисленной автоматически (например, основанной на правилах или на изображении). Трёхмерную форму частичного объёма генерируют посредством распространения или передвижения определённой пользователем двумерной формы PS вдоль траектории PC.
Трёхмерная форма частичного объёма ограничена в соответствии с заданными ограничениями, например, посредством одной или более заданных поверхностей в окружающем объёме SV, представляющих границы различных органов или другие заданные слои в зависимости от конкретного случая применения. Ограничение выполняют посредством отсечения вычисленного частичного объёма и некоторых или всех указанных поверхностей. Другими словами, устройство IPS обработки изображения выполнено с возможностью учёта указанных заданных ограничений в объёмном изображении IV при получении частичного объёма SV.
Основными вводными параметрами для устройства IPS обработки изображения, как предложено в настоящем документе, являются объёмное изображение IV, полученное подходящим способом IM получения изображения (КТ, МРТ или другим) или построенный из модели с соответствующим структурным определением внутренних элементов исследуемого объекта (например, женской молочной железы), определение кривой или "контура" PS формы профиля и указанная кривая PC распространения.
Кривая PC контура, которая в целом является плоской ("двумерной") кривой, и кривая PC распространения предпочтительно определены пользователем с использованием, в частности, средств графического пользовательского ввода UI, хотя в некоторых вариантах реализации предусмотрен также и ввод, основанный на тексте.
Процессор IPS изображения содержит средства PR распространения и модуль VIS визуализации. В одном варианте реализации оно также содержит средства VQ количественного определения объёма, выполненные с возможностью вычисления числовых данных в отношении частичного объёма SV.
Вкратце, работа процессора IPS изображения заключается в следующем: объём IV, который необходимо обработать, а также форму PS профиля и определение кривой PC распространения принимают на порте IM ввода. Форму или контур профиля затем распространяют вдоль кривой распространения посредством средств PR распространения, как в качестве диаграммы и схематически показано на фиг. 1А. Кривая PC (в целом плоская и замкнутая) при этом проходит в направлении, определённом кривой PC распространения, через объём IV, отделяет или генерирует в неё частичный объём SV, таким образом получая объём иссечения. Таким образом, определяемый частичный объём SV также может быть отображён вместе с начальным объёмом IV или отдельно на мониторе MT. Задачей также является определение частичного объёма, так что заданная исследуемая область (ИО, ROI), такая как масса опухолевой ткани или место опухоли, по меньшей мере частично (предпочтительно полностью) окружена частичным объёмом SV. Как вкратце упоминалось ранее, согласно одному варианту реализации система IPS обработки изображения содержит подходящие средства пользовательского ввода, в частности, средства графического пользовательского ввода для пользователя с целью определения или редактирования в интерактивном режиме формы PS профиля и кривой PC распространения и/или по существу критической исследуемой области в объёме IV.
Опять же, хотя работа описана с конкретной ссылкой на определение объёма SV иссечения при хирургии молочной железы (при том, что объём IV представляет изображаемый материал соответствующей молочной железы), это не следует расценивать в качестве ограничения объёма применения процессора IPS изображения, предложенного в настоящем документе, так как в настоящем документе также подразумеваются и другие хирургические вмешательства и немедицинские области применения.
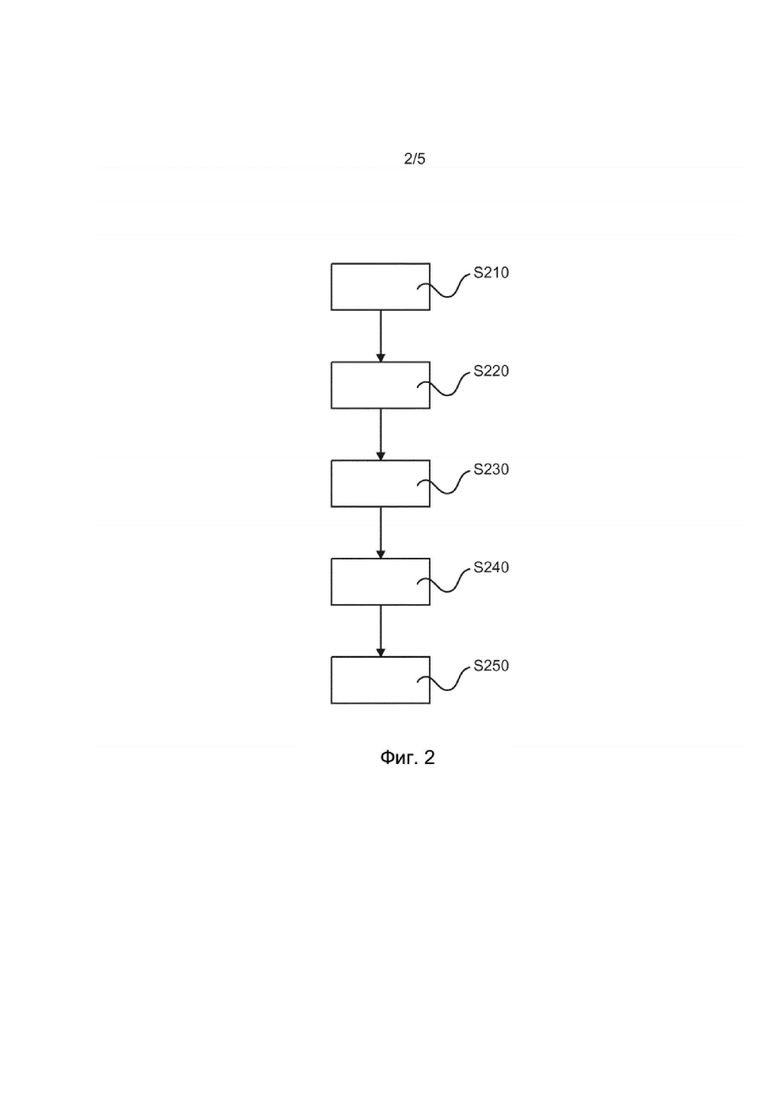
Работа процессора IPS изображения описана ниже более подробно со ссылкой на блок-схему по фиг. 2.
На этапе S210 принимают указанные выше вводные параметры (объём IV, форма PS профиля и кривая PC распространения). В частности, когда принят объём IV, его изначально отображают посредством средств VIS визуализации на мониторе MT в порте отображения.
В дальнейшем будет полезно различать два типа направлений: одно - направление распространения формы PS профиля, заданное кривой PC распространения, а другое - направление наблюдения на объёме IV в конкретном примере. Направление наблюдения может быть интерактивным образом определено нажатием кнопки мыши или действием на сенсорном экране (если позволяет монитор) или посредством другой формы пользовательского ввода, хотя в настоящем документе также предусмотрена возможность автоматического определения в некоторых вариантах реализации. Например, в интерактивном варианте реализации пользователь может определять своё предпочтительное направление наблюдения посредством операции нажатия и перетаскивания мыши или посредством проведения по сенсорному экрану или других действий на сенсорном экране по экрану MT для выполнения, например, поворота или перемещения представленного вида изображение IV. В одном варианте реализации направление наблюдения может быть определено как перпендикуляр к наблюдаемой плоскости. Наблюдаемая плоскость сама по себе может быть отображена посредством очерчивания квадрата, прямоугольника, круга или треугольника (или любой другой формы) показателя в качестве индикатора плоскостной ориентации в указанной плоскости, так что внутренняя часть показателя отображена другим оттенком или с другой затемнённостью, чем окружающее изображение IV.
Представление IV объёма с изображением само по себе может представлять собой любое подходящее представление или отображение: общей модели органа, персонализированной версии общей модели органа, результата разбиения на части изображения (МРТ, КТ, трёхмерного оптического и т.д.), полученного от пациента посредством подходящего способа IM получения (сканера КТ, магнитно-резонансного томографа или камеры глубокой чувствительности и т.д.), или данных (персонализированной) модели, основанных на таком изображении. Объём IV с изображением на основе модели или изображения может быть деформирован для учёта силы тяжести, действующей на соответствующий орган для лучшего воспроизведения действительного внешнего вида органа, как он будет выглядеть на операционном столе.
Исследуемая область, которую необходимо включить во частичный объём SV, или окружить им, в объёме IV, может быть получена из полностью или наполовину автоматизированного разбиения на части заданного объёма IV или может быть подобным образом определена в интерактивном режиме пользователем при отображении объёмного изображения. Исследуемая область ("хирургическая цель", например, опухолевый объект) может быть отображена, если известны её местоположение, форма и/или размер. Исследуемая область затем может быть вставлена в изображение IV в качестве виртуального опухолевого объекта, расположенного и настраиваемым образом отрегулированного по размеру пользователем. Например, это может быть достигнуто посредством расположения в интерактивном режиме маркера, например, сферы (или любого другого геометрического объекта), в объёме IV (представляющего орган). Размер сферы, и, таким образом, исследуемой области, может быть, например, отрегулирован с использованием колеса мыши, например, для увеличения и уменьшения сферы. Положение сферы может быть изменено посредством поступательного перемещения в области наблюдения. Для изменения трёхмерного местоположения маркерной сферы исследуемой области, могут чередоваться этапы поступательного перемещения сферы в области наблюдения и/или изменения направления наблюдения.
После определения исследуемой области пользователем или после загрузки разбиения исследуемой области на части в объёме IV, исследуемую область в объёме IV отображают при требуемом направлении наблюдения на экране MT. В одном варианте реализации данное начальное направление наблюдения может быть автоматическим образом предложено пользователем на основании протоколов получения изображения соответствующего органа. В одном варианте реализации, если начальное направление наблюдения предложено автоматически, система ожидает соответствующего подтверждающего действия, например, нажатия кнопки мыши или действия на сенсорном экране.
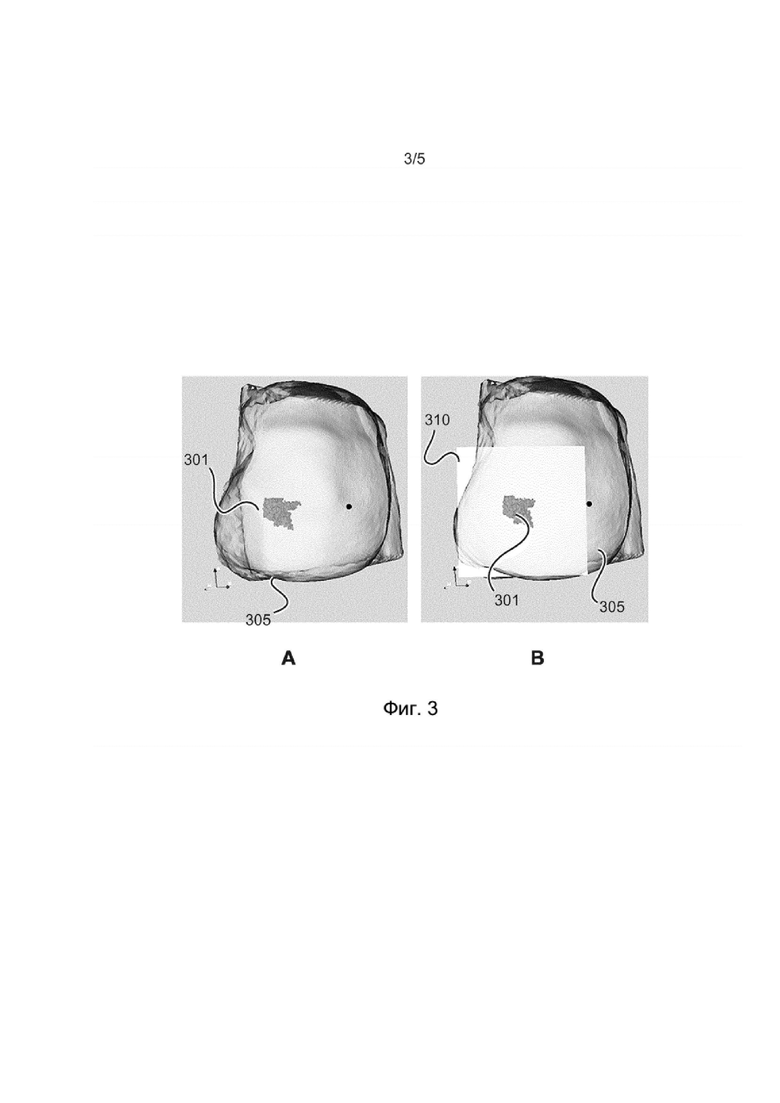
В одном варианте реализации для поддержки пользователя при определении формы профиля и/или направления распространения, процессор IPS изображения выполняет отображение на экране плоскости наблюдения, так что перпендикуляр к данной плоскости параллелен выбранному в данный момент направлению распространения. В одном варианте реализации положение плоскости наблюдения (в частности, её пространственная глубина) может быть определено пользователем или может быть отрегулировано системой, так что плоскость наблюдения пересекает середину исследуемой области или пересекает представленный орган посередине. Начальное направление наблюдения может быть вычислено заранее, так чтобы представлять вид органа спереди. В качестве альтернативы, направление наблюдения может быть интерактивным образом отрегулировано пользователем для определения ориентации объёма SV иссечения, который необходимо изобразить. Плоскость наблюдения может быть отображена на переднем плане, как показано на фиг. 3В, или может быть отображена на "скрытом" виде, как показано на фиг. 3А.
Что касается определения кривой PS формы профиля или контура, в одном варианте реализации она может быть отредактирована или определена пользователем посредством ввода необходимой информации о форме. Форма PS профиля или контура определяет местную или общую форму сечения частичного объёма SV, который необходимо определить. В настоящем документе предусмотрены различные режимы ввода или режимы редактирования в соответствии со средствами UI пользовательского ввода или инструментом PSE редактирования профиля. Данные режимы включают, без ограничения, рисование в свободной форме закрытого контура, многоугольника, определённого посредством интерактивного задания вершин, определение круга или другой формы, определённой серединой опухоли (если задана) и дополнительной точкой на контуре круга. Если определение формы профиля происходит посредством пользовательского взаимодействия с использованием рисования, форма отображается в плоскости наблюдения, которая также может быть названа в настоящем документе как плоскость рисования с пониманием того, что ориентация плоскости наблюдения (иначе говоря, направление наблюдения в соответствии с перпендикуляром к плоскости наблюдения) может быть изменена после завершения рисования формы профиля. Форма затем будет отображена в различных видах в перспективе (возможно искажённой) в ответ на запрошенные пользователем изменения плоскости и/или направления наблюдения. В продолжение этого, в одном варианте реализации, система IPS обработки изображения предоставляет пользователю возможность изменения плоскости наблюдения при том, что рисование продолжается. Плоскость рисования таким образом сохраняет предыдущую ориентацию плоскости наблюдения, так что плоскость рисования таким образом может не быть всегда параллельной во время рисования или определения формы профиля.
Двумерная форма PS также может быть получена автоматически посредством работы инструмента SF обнаружения формы. В варианте реализации инструмент обнаружения формы проектирует форму опухоли в соответствии с заданным направлением наблюдения плоскости наблюдения с расширением при необходимости для учёта запаса в целях надёжности (т.е. запаса иссечения при планировании хирургического вмешательства). Допускается, чтобы исследуемая область опухоли была заранее разбита на части посредством ручного или автоматического инструмента разбиения на части, так что средства SF обнаружения формы могут действовать в ней как было описано. Однако в других вариантах реализации, средства обнаружения формы содержат инструмент разбиения на части для выполнения вначале разделения на части и для проецирования разделённой на части формы на плоскость наблюдения.
После подтверждения пользователем направления наблюдения, например, посредством нажатия кнопки мыши или действия на сенсорном экране или клавиатуре, управление процессом переходит на этап S220.
На этапе S220 распространения, определенную пользователем или автоматически образованную двумерную форму PS поступательно перемещают вдоль кривой PC распространения для образования общей призмы (если кривая представляет собой линию) или, более широко, (если кривая не является линией) "трубки", имеющей в сечении форму PS, введённую пользователем. Кривая PS может быть линией, перпендикулярной плоскости наблюдения, или любой кривой также заданной посредством имеющегося приложения или определённой пользователем.
В одном варианте реализации кривая распространения проходит через внутреннюю точку кривой, например, среднюю точку, а форма профиля затем распространяется в данной конфигурации вдоль кривой распространения, другими словами, кривая распространения всегда удерживается в области, очерченной соответствующей формой профиля. Однако это не является обязательным условием для всех вариантов реализации. Например, форма профиля может также распространяться вместе с кривой распространения через объём IV, так что кривая PC не проходит через (в общем закрытой) кривую PS. Если кривая распространения не является прямой линией (другими словами, имеет ненулевое искривление, например, является вогнутой или выпуклой кривой), форма профиля описывает трубу при продвижении в направлении кривой распространения. Другими словами, вариант реализации, в котором кривая распространения представляет собой линию, может рассматриваться как частный случай, в котором распространение происходит в одном направлении, в то время как распространение вдоль кривой с ненулевым искривлением соответствует распространению в изменяющихся направлениях (касательные направления кривой). Фрагментарно определённые кривые PC распространения (линейные или не линейные) также предусмотрены в настоящем документе.
Например, кривая распространения может быть повторно определена посредством множества участков прямых линий, соединенных соответствующими концами для того, чтобы определить "ломанную" кривую распространения. Например, пользователь может допустить, в первую очередь, распространение формы распространения вдоль первого участка линии. Затем пользователь подаёт прерывающий сигнал, тем самым останавливая распространение. Затем пользователь присоединяет к текущему положению конца текущего участка линии другой участок линии, продолжающийся в другом направлении. Затем пользователь подаёт возвратную команду и форма распространения продолжает распространение теперь вдоль второго участка линии. В целях обеспечения сглаживания переходов в изломах, распространение может быть удлинено в месте присоединения таким образом, чтобы соответствующие частичные объёмы (вокруг каждого из участков кривой распространения) взаимно проникали друг в друга. Принимая во внимание данный пример в дальнейшем, можно увидеть, что любые сложные формы могут быть образованы посредством определения множества (необязательно соединённых) направлений распространения или кривых распространения. Затем вдоль каждой из данных кривых допускается распространение одинаковых или разных форм. Другими словами, сложные частичные объёмы могут быть построены и могут быть определены посредством установленного теоретического пересечения или объединения определённых таким образом трубок или призм (с основанием, заданным кривой PC профиля) вдоль соответствующих участков кривой распространения.
В качестве ещё одного варианта вышесказанного, хотя в предыдущих примерах форма профиля остаётся постоянной при её распространении вдоль заданной кривой PC, это может не быть обязательным условием для всех вариантов реализации. Например, может быть выбрана начальная форма профиля, которая распространяется вдоль кривой распространения на первое расстояние. Затем пользователь подаёт прерывающий сигнал, который останавливает распространение. Затем форму профиля изменяют с использованием инструмента PSE редактирования формы и затем возвращаются к распространению, но с другой формой. Изменение профиля может быть выполнено несколько раз вдоль направления распространения для получения частичного объёма SV с участками, на которых форма профиля различается. Если форму профиля изменяют, может быть использована интерполяционная схема, например, на основе сплайна или любого другого численного способа, для обеспечения гладких переходов формы или "плавных изменений" между изменяющимися формами профилей.
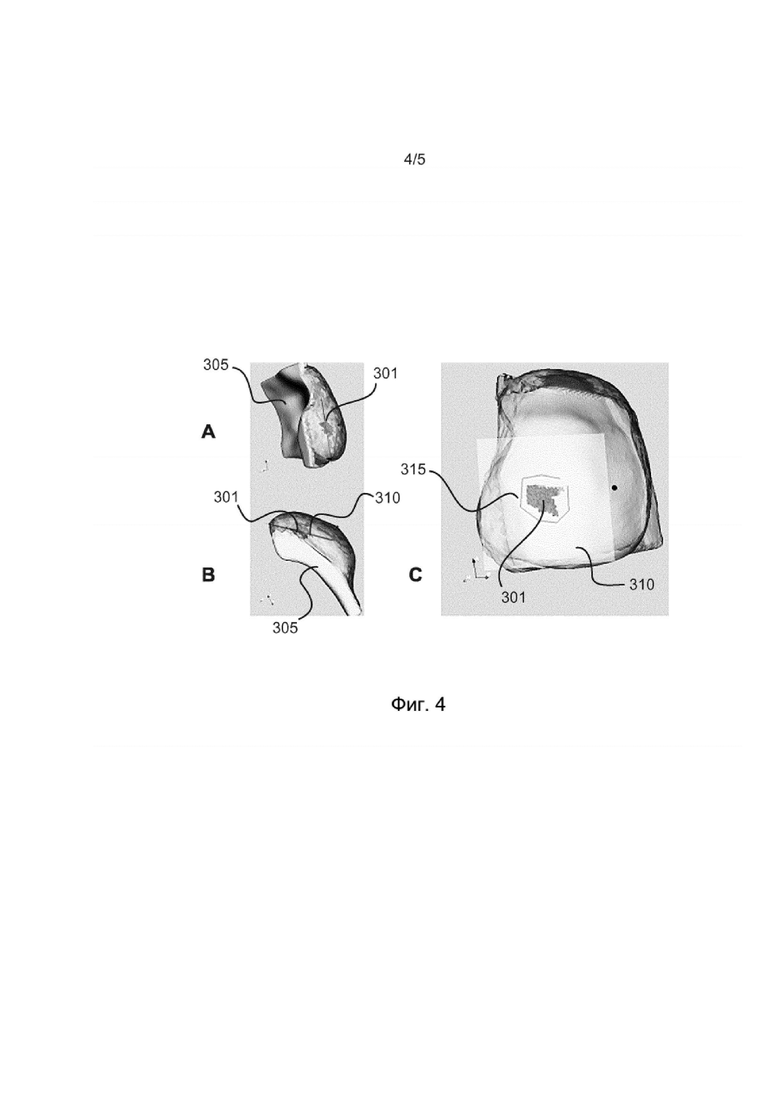
Следует отметить, что форма профиля, помимо заданной пользователем, также может быть определённой автоматически в исследуемой области посредством средств SF определения формы. Например, форма профиля может быть определена как выпуклая оболочка вокруг участка исследуемой области на соответствующей плоскости наблюдения. Выпуклую оболочку затем немного расширяют для обеспечения определения предела иссечения. Такой подход в целом определяет многоугольник, как показано на фиг. 4B, вокруг исследуемой области.
Как было отмечено ранее, предложенный в настоящем документе способ обеспечивает возможность учёта слоёв в объёме IV. Например, на объёме IV с изображением жировая и мышечная ткань может быть закодирована различными значениями вокселов, которые определяют поверхности в объёме с изображением. Участок частичного объёма SV затем может быть обрезан или "вырезан" посредством его пересечения двумя поверхностями, например, заданными границами органов, или поверхностями, полученными из границ органов (например, посредством требуемого минимального расстояния до другой границы органа). В качестве альтернативы, частичный объём SV может быть обрезан по границе поверхности одного органа и заданной длине трубки SV. В соответствии с одним вариантом реализации, если направление распространения проходит через поверхность раздела между двумя такими слоями, то распространение прекращают. Например, распространение формы профиля вдоль кривой профиля прекращают, если по меньшей мере одна точка формы профиля пересекается с такой поверхностью раздела. В другом варианте реализации распространение формы профиля продолжают через границу раздела и затем немедленно останавливают после того, как все точки кривой прошли через указанную поверхность. В общем, всё вышесказанное по существу определяет отсечение распространённого частичного объёма посредством соответствующих поверхностей раздела между различными слоями.
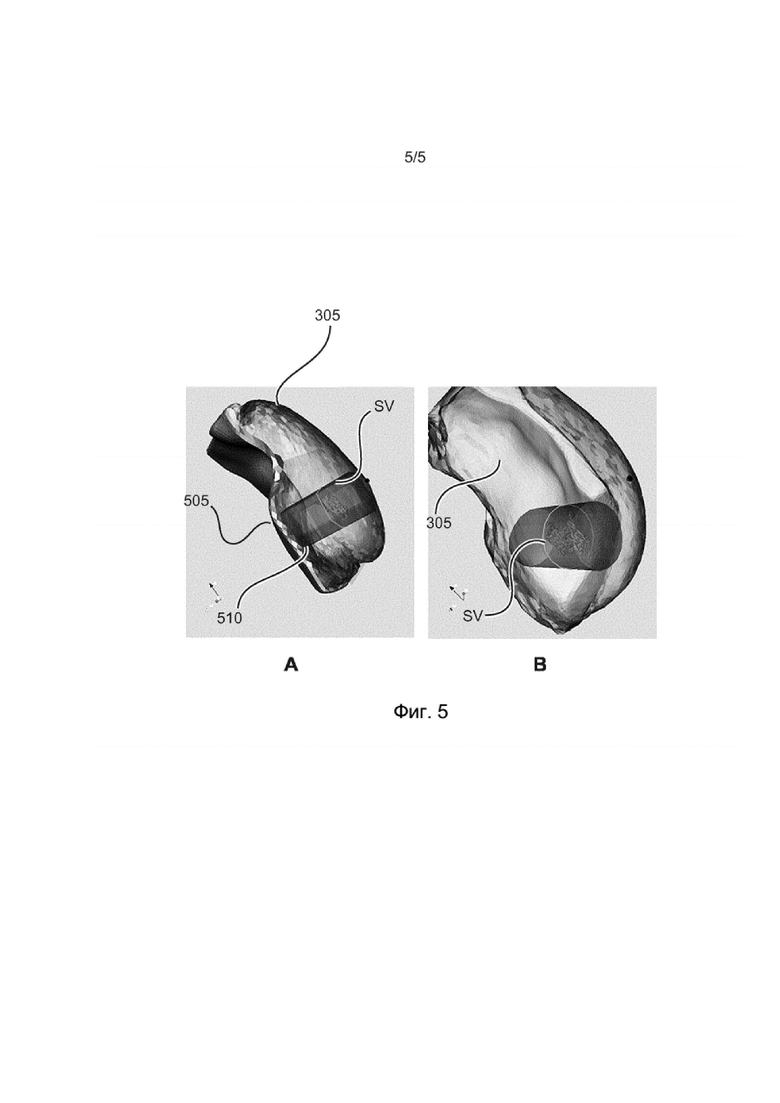
На необязательном этапе S230 определённый таким образом (возможно, отсечённый) частичный объём затем отображают для вывода на монитор MT. Это может быть выполнено во множестве форм и на фиг. 5А, В показаны примеры этого. В предпочтительном варианте реализации частичный объём показан в его соответствующем положении во частичном объёме, отображенном в различных цветах или тонах. В альтернативном варианте реализации предпочтительно показывать только частичный объём без окружающего объёма с изображением, или, возможно, предпочтительно показывать объём с изображением вместе с удалённым частичным объёмом.
Вместо этапа S230, или в дополнение к нему, на необязательном этапе S240 затем вычисляют численный объём частичного объёма или соотношение между численным объёмом частичного объёма и численным объёмом объёма IV с изображением посредством средств VQ количественного определения и выводят в числовой форме на экран MT вместе с отображённым частичным объёмом или общим объёмом IV.
На другом необязательном этапе S250 устанавливают, полностью ли исследуемая область попадает во частичный объём и если нет, то подаётся соответствующий тревожный сигнал. В дополнение к этому, тревожный сигнал может также быть подан, если величина области, большая, чем заданная величина исследуемой области, проходит за пределы частичного объёма. Частичный объём предназначен для вмещения критической исследуемой области (например, раковой ткани). В частности, частичный объём должен полностью включать исследуемую область, а также подходящий запас иссечения (запас в целях надёжности) вокруг исследуемой области. По этой причине средства VQ количественного определения объёма также могут быть выполнены с возможностью выполнения функций слежения. Другими словами, средства VQ количественного определения объёма отслеживают, полностью ли исследуемая область находится в определённом таким образом частичном объёме SV. Если исследуемая область не полностью находится в нём, то подаётся подходящий тревожный сигнал (например, звуковой сигнал) посредством приведения в действие преобразователя TR (например, громкоговорителя) или посредством подачи рекомендательного визуального индикатора на монитор MT или на соответствующий маячок TR. В альтернативном варианте реализации вместо отслеживания включения исследуемой области полностью во частичный объём SV, средства количественного определения объёма могут также быть выполнены с возможностью индикации тревожного сигнала, если величина области, большая, чем заданная величина указанной исследуемой области, проходит на пределы частичного объёма SV. Пользователь также может быть проинформирован об этом посредством подачи акустического или визуального предупреждающего сигнала управляющим преобразователем TR или посредством указания на этот факт графическим образом на мониторе MT. Заданная величина (например, процентное значение или другое пороговое значение в абсолютном выражении) может быть выполнена с возможностью установки пользователем. В дополнение, или взамен, тревожный сигнал может быть подан, если часть текущего удалённого частичного объёма превышает заданное (и, возможно, регулируемое пользователем) пороговое значение объёма. Также, в случае, если это происходит, распространение формы PS может быть остановлено и возобновлено только после подачи пользователем подтверждающего сигнала.
На фиг. 3 - 5 показано более подробное изображение (на примере хирургии молочной железы) примера и его отображение для иллюстрации концепций, описанных выше на фиг. 1 и 2.
На фиг. 3А слева показано трёхмерное представление женской молочной железы. Трёхмерное представление 305, которое представляет собой сетчатое отображение, разделено на слои, так что оно содержит поверхность кожи, а также поверхность, которая представляет грудную мышцу. Определение 301 опухоли показано в объёме 305 молочной железы. На виде В плоскость 310 наблюдения проходит через середину опухоли 301 параллельно плоскости проекции согласно текущему виду. В одном варианте реализации, как указано выше, плоскость наблюдения может быть расположена интерактивным образом. На фиг. 3 плоскость наблюдения также косвенно определяет направление проекции, вдоль которого необходимо поступательно переместить форму SP профиля для определения частичного объёма SV в объёме IV, обозначенном ссылочным номером 305.
В данной конкретной конфигурации траектория PC является линейной и проходит вдоль перпендикуляра 310 к плоскости, хотя это может быть не показано также на видах А, В на фиг. 4, где направление наблюдения является перпендикулярным направлению распространения вдоль перпендикуляра к плоскости 310, показанного на виде сбоку. Каждый из видов А, В по фиг. 4 представляет вид сбоку видов согласно видам А, В по фиг. 3, и плоскость 310 в данном случае аналогично показана на виде сбоку (в виде линии). Конфигурация, в которой направление наблюдения объёма IV не совпадает с направлением распространения (например, направлением наблюдение на вид сбоку по фиг. 4А, В), может быть предпочтительной для обеспечения возможности пользователю лучшей визуализации распространения формы профиля вдоль соответствующей кривой. Другими словами, после определения направления распространения, направление наблюдения может быть изменено пользователем, а направление распространения (с распространяющимся вдоль него профилем PS) затем может быть визуализировано при различных перспективных отображениях в ответ на данные изменения направления наблюдения.
Вид В изображает контур PS в виде сечения объёма SV иссечения, нарисованный вокруг места 310 опухоли на плоскости рисования.
В одном варианте реализации система IPS выполнена с возможностью автоматического переключения на такое направление наблюдения на вид сбоку после начала распространения формы. В частности, в одном варианте реализации отображение частичного объёма SV продолжается постепенно и с наращиванием. Другими словами, пользователь может в действительности видеть на экране MT каким образом форма профиля проходит вдоль кривой распространения по объёму. Кроме того, построение частичного объёма SV отображается постепенно с наращиванием слоя за слоем.
Однако предусмотрены альтернативные варианты реализации, в которых частичный объём вычисляют в фоновом режиме после введения пользователем соответствующих параметров (в частности, кривой распространения и формы профиля), и полностью вычисленный таким образом частичный объём затем сразу отображают на экране.
В дополнение к вышесказанному, хотя в одном варианте реализации направление распространения введено после подачи пользователем подтверждающего сигнала "OK", также предусмотрен более интерактивный режим. В соответствии с данным режимом, после того как пользователь определил форму профиля и кривую распространения, распространение вдоль кривой происходит согласованно с одновременным перемещением под управлением пользователя, например, на сенсорном экране пользователь может вычерчивать пальцем кривую распространения, а форма профиля затем очерчивает частичный объём во время проведения пользователем пальцем по экрану. Аналогичным образом, пользователь может использовать хорошо знакомую операцию перетаскивания мыши для вычерчивания кривой распространения, в то время как форма профиля проходит вдоль кривой распространения, следуя за пользовательским вычерчиванием или текущим действием пальцем на сенсорном экране.
На фиг. 5, вид А, показан пример полученного объёма IV. Объём SV иссечения (в тёмных тонах) получен путём поступательного перемещения многоугольного сечения, изображённого на фиг. 4С, вдоль линии, перпендикулярной плоскости рисования. Кроме того, объём автоматически отсекается на поверхности кожи и оболочке грудной мышцы. На виде В показан цилиндрический частичный объём SV, полученный посредством области PS круглого сечения.
Модуль IPS обработки изображения может быть выполнен в виде модуля программного обеспечения и может выполняться на вычислительном устройстве общего назначения или специально предусмотренном вычислительном устройстве. В частности, процессор IPS может быть выполнен на терминале рабочей станции вывода изображения системы изображения. Модуль IPS обработки изображения с некоторыми или всеми его компонентами может находиться на исполнительном органе (например, компьютере, рабочей станции или терминале общего назначения) или доступ к нему может осуществляться удалённо/централизовано посредством исполнительного органа через подходящую сеть связи в распределённой архитектуре.
В качестве альтернативы, компоненты модуля IPS обработки изображения могут быть выполнены в виде соответствующих ППВМ (программируемая пользователем вентильная матрица) или в виде аналогичных отдельных чипов. В качестве неограничивающего примера, компоненты могут быть запрограммированы на подходящей конкретной вычислительной платформе или платформе разработки, например, Matlab® или Simulink®, а затем переведены в стандартные программы на С++ или С, поддерживаемые в библиотеке или связываемые при обращении к ним исполнительного органа, такого как компьютер, рабочая станция или терминал общего назначения.
В другом приведённом в качестве примера варианте реализации настоящего изобретения предложены компьютерная программа или элемент компьютерной программы, характеризующиеся тем, что они выполнены с возможностью исполнения этапов способа согласно одному из описанных ранее вариантов реализации на соответствующей системе.
Элемент компьютерной программы таким образом может храниться на вычислительном устройстве, которое также может быть частью варианта реализации настоящего изобретения. Данное вычислительное устройство может быть выполнено с возможностью исполнения или проведения этапов описанного выше способа. Более того, оно может быть выполнено с возможностью управления компонентами раскрытого выше устройства. Вычислительное устройство может быть выполнено с возможностью автоматического управления и/или исполнения указаний пользователя. Компьютерная программа может быть загружена в рабочую память процессора данных. Процессор данных таким образом может быть выполнен для исполнения способа согласно изобретению.
Приведённый в качестве примера вариант реализации настоящего изобретения относится к компьютерной программе, которая с самого начала использует настоящее изобретение, и к компьютерной программе, которая посредством обновления изменяет существующую программу так, чтобы она использовала настоящее изобретение.
Кроме того, элемент компьютерной программы может быть выполнен с возможностью обеспечения необходимых этапов для выполнения процедуры приведённого в качестве примера варианта реализации описанного выше способа.
Согласно другому приведённому в качестве примера варианту реализации настоящего изобретения, представлен компьютерочитаемый носитель, например CD-ROM, который содержит элемент компьютерной программы, хранящийся на нём, который описан в приведённом ранее разделе.
Компьютерная программа может храниться и/или распространяться на подходящем носителе, например, оптическом носителе данных или твердотельном носителе, поставляемом вместе с другим аппаратным обеспечением, или в качестве его части, но также может распространяться в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Однако компьютерная программа может быть также предоставлена через сеть, такую как всемирная сеть, и может быть загружена в рабочую память процессора данных из такой сети. Согласно другому приведённому в качестве примера варианту реализации настоящего изобретения, представлен носитель, обеспечивающий доступность загрузки элемента компьютерной программы, который выполнен с возможностью исполнения способа в соответствии с одним из описанных ранее вариантов реализации настоящего изобретения.
Следует отметить, что варианты реализации настоящего изобретения описаны со ссылкой на различные объекты. В частности, некоторые варианты реализации описаны со ссылкой на пункты формулы изобретения, относящиеся к способу, при том, что другие варианты реализации описаны со ссылкой на пункты формулы изобретения, относящиеся к устройству. Однако специалисту в данной области техники на основе приведённого выше и ниже описания будет ясно, что, если не определено обратное, в дополнение к любой комбинации особенностей, принадлежащей объекту одного типа, также любая комбинация особенностей, относящихся к объекту другого типа, рассматривается раскрытой в отношении данного случая применения. Однако все особенности могут быть комбинированы с обеспечением результата с эффективным взаимодействием, который является более, чем простым суммированием особенностей.
Хотя изобретение было изображено и описано подробно на чертежах и в приведённом выше описании, такое изображение и описание должны рассматриваться только как иллюстративные и не ограничивающие. Настоящее изобретение не ограничено раскрытыми вариантами реализации. Другие изменения раскрытых вариантов реализации могут быть очевидны специалисту в данной области техники, и выполнены им, при реализации заявленного изобретения на основании изучения чертежей, описания и зависимых пунктов формулы изобретения.
В формуле изобретения термин "содержащий" или "включающий" не исключает возможности наличия других элементов или этапов, а грамматическая конструкция, указывающая на единственное число, не исключает множественного числа. Один процессор или другое устройство могут исполнять функции нескольких блоков, описанных в формуле изобретения. Сам факт, что конкретные меры раскрыты во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что комбинация данных мер не может быть использована с получением преимущества. Любые ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничение объёма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЕАКЦИИ ДИСПЕРСНОЙ СИСТЕМЫ | 2024 |
|
RU2833415C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ, УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ, ПРОГРАММА ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ЭКСПЛУАТАЦИИ ДОМЕННОЙ ПЕЧИ | 2022 |
|
RU2840636C2 |
| Способ определения местоположения пользователя при ориентировании на местности в интерактивном режиме в условиях отсутствия связи для передачи цифровых данных | 2021 |
|
RU2779812C1 |
| Рельефно-объемный экран и способ его функционирования | 2021 |
|
RU2782005C1 |
| СПОСОБ ВВОДА СТИЛУСНЫМ ПЕРОМ, ЭЛЕКТРОННОЕ УСТРОЙСТВО И СИСТЕМА | 2022 |
|
RU2831519C2 |
| ЖИДКОКРИСТАЛЛИЧЕСКАЯ ЛИНЗА С ПЕРЕСТРАИВАЕМЫМ ФОКУСОМ | 2019 |
|
RU2719341C1 |
| Способ и устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах | 2019 |
|
RU2705943C1 |
| Устройство создания многомерных виртуальных изображений органов дыхания человека и способ создания объёмных изображений с применением устройства | 2021 |
|
RU2783364C1 |
| Способ определения тепловых характеристик (теплоёмкости, теплопроводности) термически изотропных тел | 1943 |
|
SU64316A1 |
| Оптически изменяемый защитный элемент и способ его изготовления | 2024 |
|
RU2829112C1 |
Группа изобретений относится к технологиям обработки изображений. Техническим результатом является обеспечение отсечения частичного объема посредством поверхностей раздела между слоями. Предложен способ обработки изображения. Способ содержит этап, на котором осуществляют прием объемного изображения, формы профиля, определяющей форму сечения частичного объема в указанном объемном изображении, и кривой распространения. Далее осуществляют распространение формы профиля через объемное изображение вдоль кривой распространения для получения таким образом частичного объема в указанном объеме. А также отображают частичный объем на устройстве отображения. 3 н. и 11 з.п. ф-лы, 5 ил.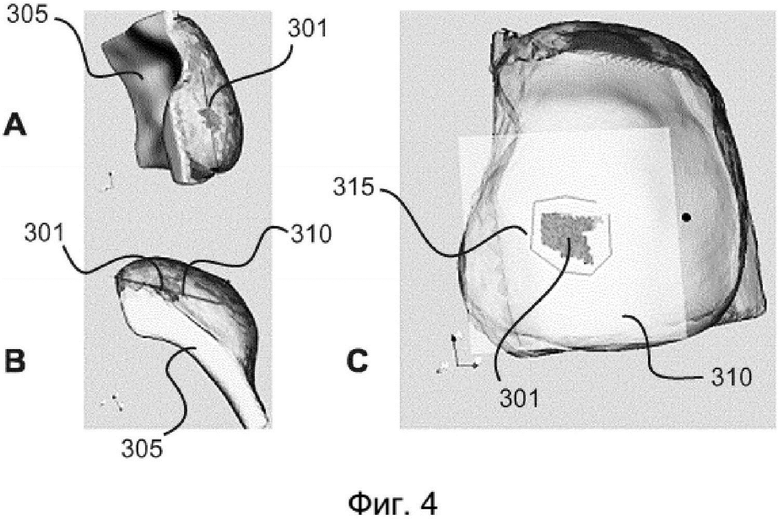
1. Способ обработки изображения, включающий:
прием (S210) i) объемного изображения, ii) формы профиля, определяющей форму сечения частичного объема в указанном объемном изображении, и iii) кривой распространения;
распространение (S220) формы профиля через объемное изображение вдоль кривой распространения для получения таким образом частичного объема в указанном объеме и
отображение (S230) частичного объема на устройстве отображения,
при этом объемное изображение разделяют на слои, а распространение формы профиля автоматически оканчивают на поверхности раздела между двумя слоями в объеме, так что частичный объем не проходит через поверхность раздела.
2. Способ обработки изображения по п. 1, включающий отображение частичного объема вместе с указанным объемным изображением.
3. Способ обработки изображения по п. 1 или 2, включающий
отображение объемного изображения или по меньшей мере его части и
постепенное построение отображения частичного объема во время распространения формы профиля с удалением при этом частичного объема из указанного объемного изображения.
4. Способ обработки изображения по любому из пп. 1-3, включающий
вычисление (S240) размера частичного объема и/или соотношения между частичным объемом и указанным объемом.
5. Способ обработки изображения по любому из пп. 1-4, включающий
подачу (S250) сигнала, если вычисленный размер частичного объема и/или вычисленное соотношение нарушает заданное пороговое значение.
6. Способ обработки изображения по любому из пп. 1-5, в котором
указанный объем содержит заданную критическую область, а
тревожный сигнал подают, если критическая область не полностью окружена частичным объемом или если критическая область выступает за пределы частичного объема на величину больше заданной.
7. Способ обработки изображения по любому из пп. 1-6, в котором объемное изображение представляет собой любое из следующего: изображение, полученное магнитно-резонансной томографией (МРТ), изображение, полученное компьютерной томографией (КТ), оптическое трехмерное изображение, ультразвуковое трехмерное изображение или персонализированная или общая модель.
8. Способ обработки изображения по любому из пп. 1-7, в котором форма профиля выполнена регулируемой.
9. Способ обработки изображения по любому из пп. 1-8, в котором форму профиля в объемном изображении определяют автоматически.
10. Система (IPS) обработки изображения, содержащая:
порт (IN) ввода, выполненный с возможностью приема i) объемного изображения, ii) формы профиля, определяющей форму сечения частичного объема в указанном объемном изображении, и iii) кривой распространения,
средства (PR) распространения, выполненные с возможностью распространения формы профиля через объемное изображение вдоль кривой распространения для получения таким образом частичного объема в указанном объеме; и
средства (VIS) визуализации, выполненные с возможностью отображения частичного объема на устройстве отображения,
при этом объемное изображение разделено на слои, а
распространение формы профиля автоматически оканчивается на поверхности раздела между двумя слоями в объеме или частичный объем SV отсекается на поверхности раздела, так что частичный объем не проходит через указанную поверхность раздела.
11. Система обработки изображения по п. 10, содержащая модуль (PSE) редактирования формы профиля, выполненный с возможностью регулировки формы профиля в ответ на запрос.
12. Система обработки изображения по п. 10 или 11, содержащая средства (SF) определения формы для автоматического обнаружения формы профиля в объемном изображении.
13. Система обработки изображения по любому из пп. 10-12, содержащая средства (VC) количественного определения объема, выполненные с возможностью вычисления размера частичного объема и/или соотношения между частичным объемом и объемом.
14. Компьютерочитаемый носитель для управления системой по любому из пп. 11-13, на котором сохранены команды, которые, при их исполнении процессором, побуждают его исполнять этапы способа по любому из пп. 1-9.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ОПЕРАТИВНОГО ВМЕШАТЕЛЬСТВА НА ВНУТРЕННИХ ОРГАНАХ | 2000 |
|
RU2202276C2 |

