Область техники
Изобретение относится к объединению биотехнологии, микробиологической промышленности и технологического инжиниринга.
Уровень техники
Интенсивные струи жидкости являются ключевым техническим элементом в ряде промышленных устройств, например, при шлифовании, резке и т.д. Детальная характеристика многофазных газожидкостных потоков имеет решающее значение в металлургических процессах, при проектировании эффективных воздушных и наземных устройств, устройств сгорания в авиационных и аэрокосмических системах, двигателей в транспортных и судовых установках, а также при разработке новых технологий, приводящих к техническому прогрессу. Реактивные параметры системы определяют характеристики устройства и его эффективность, а также являются актуальной информацией для промышленной биотехнологии в связи с возросшим спросом на эффективные технологические решения в этой области.
Струйные биореакторы представляют собой тип установок с рециркуляцией жидкой и газовой фаз, вызванной генерированием многомасштабных газожидкостных струй с высоким объёмным содержанием газовых пузырьков. Поведение струи можно охарактеризовать как физический процесс с высокой турбулентностью, что часто приводит к возникновению технических проблем, связанных с управлением потоком, анализом его параметров и дальнейшей оптимизацией конструктивных элементов, таких как сопло и струйный насос. Существует область жидкого ядра, на структуру которого влияет взаимодействие с газовой фазой, что приводит к ее существенному изменению, т.е. деформации непрерывного потока.
Взаимодействие жидкой и газовой фаз порождает ряд физических явлений, таких как обмен импульсом и энергией между фазами потока, уникальная структура пульсаций потока, фазовые переходы, пузырьковые эффекты и процессы растворения в газовой фазе, которые существенно изменяют характеристики тепло- и массообмена. Внешние силы, действующие на поверхность струи, могут приводить к осцилляциям и возмущениям границ струи. Эти колебания могут усиливаться и в конечном итоге привести к распаду потока на мелкие капли или даже к его полному разрушению.
Особенностью этих устройств является сочетание высокой энергии струйного потока и значительных размеров аппарата. Кинетическая энергия струи является основным источником турбулентности и приводит к микромасштабному перемешиванию жидкой и газовой фаз за счёт турбулентной диффузии. Это означает, что формирование струйного течения связано с большими удельными затратами. В случае низкой эффективности такой струи, т.е. ее значительного разрушения, затраты становятся ещё более значительными.
Поэтому фундаментальное физическое понимание формирования и поведения струй является важной исследовательской и оперативной задачей.
Известен ряд методов, применимых к изучению газожидкостных струй благодаря их широкому применению в технических и биотехнических задачах. В последнее время различные исследования опираются на вычислительную гидродинамику (CFD), моделирующую гидродинамические процессы в биореакторах. Математическое описание многофазных потоков во многих аспектах сложно из-за особенностей, связанных с взаимным влиянием непрерывной и дисперсной фаз. Поэтому новую волну исследований получили пузырьковые, кольцевые и более сложные потоки.
Важные массообменные характеристики процесса изучены в работах Starodumov, I.; Nizovtseva, I.; Lezhnin, S.; Vikharev, S.; Svitich, V.; Mikushin, P.; Alexandrov, D.; Kuznetsov, N.; Chernushkin, D. Measurement of Mass Transfer Intensity in Gasn-Liquid Medium of Bioreactor Circuit Using the Thermometry Method. Fluids 2022, 7, 366., Petersen, L.A.; Villadsen, J.; Jørgensen, S.B.; Gernaey, K.V. Mixing and mass transfer in a pilot scale U-loop bioreactor. Biotechnol. Bioeng. 2017, 114, 344–354. и т.д. Помимо характеристики многофазных потоков, методы CFD нашли применение для решения проблемы достижения оптимальной производительности биореакторов. Однако эта проблема всегда связана с описанием многофазных многокомпонентных потоков с развитой турбулентностью, что делает задачу компьютерного моделирования вычислительно сложной. Между тем, перечень факторов, влияющих на формирование струй, весьма значителен, и достоверными источниками данных о свойствах струй остаются экспериментальные исследования и объективный мониторинг.
В настоящее время доказано, что в ряде областей новые методы глубокого и машинного обучения, в частности методы компьютерного зрения, превосходят предыдущие современные методы. Эти работы часто представляют общую информацию о новых методах или сравнивают их. С недавним развитием цифровых технологий и аналитики больших данных цифровые инструменты постепенно начинают применяться в биотехнологических исследованиях. Биологические, гидродинамические, тепло- и массообменные процессы в биореакторах (ферментерах) являются ключевыми объектами для таких цифровых подходов, поскольку эти процессы часто сложны для анализа. Максимальная эффективность биореактора в первую очередь определяется переносом газовой фазы через границу раздела фаз газ-жидкость. Поэтому гидродинамические параметры, такие как размер пузырьков в газожидкостном потоке, существенно влияют на поведение потока и определяют общую производительность ферментера. Алгоритмы машинного обучения демонстрируют преимущества в плане точности определения размеров пузырьков. В научно-технической литературе и отчётах все чаще появляются истории успеха, когда компьютерное зрение оказывается не только одним из самых эффективных, но и одним из самых доступных неразрушающих методов по сравнению с дорогими инвазивными методами, требующими дополнительных, иногда избыточных, затрат.
Эксперименты показывают, что наилучшее перемешивание в струйных биореакторах обеспечивает когерентная струя с наименьшими потерями массы в виде отделившихся капель и наибольшей вертикальной скоростью. Визуально такая струя характеризуется наименьшим углом раскрытия и отсутствием краевых флуктуаций. Однако, в отличие от других технических устройств, в струйных биореакторах водная струя на выходе из сопла содержит большое количество газовой фазы (вплоть до объёмного соотношения 1:1). В зависимости от режима подачи жидкости, определяемого работой насоса, такой поток может быть пузырьковым, кольцевым или состоять из множества отдельных струй и капель. Таким образом, наблюдение за формой, структурой и скоростью струи становится одним из способов выбора оптимального режима работы биореактора.
Таким образом, известные технологии, такие как Biessey, P.; Bayer, H.; Thebeling, C.; Hilbrands, E.; Grünewald, M. Prediction of bubble sizes in bubble columns with machine learning methods или Nizovtseva, I.; Palmin, V.; Simkin, I.; Starodumov, I.; Mikushin, P.; Nozik, A.; Hamitov, T.; Ivanov, S.; Vikharev, S.; Zinovev, A.; et al. Assessing the Mass Transfer Coefficient in Jet Bioreactors with Classical Computer Vision Methods and Neural Networks Algorithms имеют недостатки, препятствующие полноценному решению заявленной технической проблемы, поэтому возникает необходимость в заявленном изобретении.
В следующих разделах будет предложен алгоритм компьютерного зрения, позволяющий стабильно обрабатывать видеозапись газожидкостного потока, полученную с помощью высокоскоростной камеры.
Раскрытие сущности изобретения
Изобретение предназначено для управления дисперсной системой.
Технический результат настоящего изобретения заключается в определении параметров реакции дисперсной системы, содержащей дисперсионную среду, в которой распределена дисперсная фаза.
Ещё один технический результат настоящего изобретения заключается в управлении параметрами дисперсной среды путём формирования команды для средства формирования дисперсной среды на изменения заданных параметров дисперсной среды.
Ещё один технический результат настоящего изобретения заключается в обучении с использованием методов машинного обучения модели, ставящей в соответствие определённым данным с датчика параметры реакции дисперсной системы с заданной вероятностью.
Данный результат достигается с помощью использования компьютерно-реализуемого способа определения параметров реакции дисперсной системы, содержащей дисперсионную среду, в которой распределена дисперсная фаза, по которому: с помощью по меньшей мере одного датчика собирают данные о физических параметрах дисперсной системы по меньшей мере в двух временных метках; на основании собранных данных для каждой временной метки формируют пространственную модель дисперсной системы; на основании сформированных пространственных моделей дисперсной системы выявляют по меньшей мере одну дисперсную частицу, представляющую собой замкнутый объём, образованный поверхностью, разделяющей дисперсионную среду и дисперсную фазу; определяют параметры выявленной дисперсной частицы; на основании определённых параметров определяют параметры реакции дисперсной системы.
В другом частном случае реализации способа в качестве реакции дисперсной системы выступает по меньшей мере: физическая реакция, в частности массообмен; химическая реакция; биологическая реакция.
Ещё в одном частном случае реализации способа в качестве физических параметров дисперсной системы выступают по меньшей мере: плотность дисперсной системы; прозрачность дисперсной системы; давление дисперсной системы; кинетическая энергия перемешивания дисперсионной системы, включающая по меньшей мере: энергию турбулизации; кислотность дисперсной системы; физико-химический состав дисперсной системы, включающий, по меньшей мере: растворенные в дисперсионной среде компоненты; температура дисперсной системы.
В другом частном случае реализации способа в качестве датчика выступает по меньшей мере: высокоскоростная видеокамера; фотодетектор; датчик давления; датчик кислотности; датчик динамического давления; датчик растворенного газа; датчик ультразвука.
Ещё в одном частном случае реализации способа датчик расположен по меньшей мере: внутри дисперсной системы в виде зонда; снаружи дисперсной системы.
В другом частном случае реализации способа пространственная модель дисперсной системы представляет собой по меньшей мере: графическое растровое изображение, в котором каждому пикселю ставится в соответствие в определённой области дисперсной системы по меньшей мере: тип вещества дисперсной системе, в частности по меньшей мере: вещество дисперсионной среды, вещество дисперсной фазы, вещество внешней среды, поверхность, разделяющая дисперсионную среду и дисперсную фазу, поверхность, разделяющая дисперсную систему и внешнюю среду; параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества; графическое векторное изображение, в котором каждая кривая характеризует по меньшей мере: поверхность, разделяющую дисперсионную среду и дисперсную фазу, поверхность, разделяющую дисперсную систему и внешнюю среду; стереоскопическое растровое изображение, представляющее собой совокупность по меньшей мере двух графических растровых изображений, полученных на основании данных, собранных датчиком с использованием эффекта параллакса; стереоскопическое векторное изображение, представляющее собой совокупность по меньшей мере двух графических векторных изображений, полученных на основании данных, собранных датчиком с использованием эффекта параллакса; трёхмерная воксельная модель, в которой каждому вокселю ставится в соответствие в определённой области дисперсной системы по меньшей мере: тип вещества в дисперсной системе, в частности по меньшей мере: вещество дисперсионной среды, вещество дисперсной фазы, вещество внешней среды, поверхность, разделяющая дисперсионную среду и дисперсную фазу, поверхность, разделяющая дисперсную систему и внешнюю среду; параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества; трёхмерная полигональная модель, в которой полигоны описывают элементы по меньшей мере: поверхности, разделяющей дисперсионную среду и дисперсную фазу, поверхности, разделяющей дисперсную систему и внешнюю среду; а каждой вершине полигона ставятся в соответствие в определённой области дисперсной системы параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества.
Ещё в одном частном случае реализации способа формируют пространственная модель дисперсной системы путём модификации заранее сформированной пространственной модели дисперсной системы, содержащей элементы, описывающие по меньшей мере: поверхность, разделяющую дисперсионную среду и дисперсную фазу, поверхность, разделяющую дисперсную систему и внешнюю среду; определённую область дисперсной системы, которой ставится в соответствие по меньшей мере: тип вещества в дисперсной системе, в частности по меньшей мере: вещество дисперсионной среды, вещество дисперсной фазы, вещество внешней среды, поверхность, разделяющая дисперсионную среду и дисперсную фазу, поверхность, разделяющая дисперсную систему и внешнюю среду; параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества. для чего модифицируют указанные элементы на основании данных о физических параметрах дисперсной системы.
В другом частном случае реализации способа для выявления дисперсной частицы в сформированной пространственной модели дисперсной системы используют предварительно обученную модель компьютерного зрения, в частности модель YOLO.
Ещё в одном частном случае реализации способа в качестве параметров дисперсной частицы выступает по меньшей мере: скорость перемещения дисперсной частицы по дисперсной системе; вектор скорости перемещения дисперсной частицы по дисперсной системе; время жизни дисперсной частицы; линейные размеры дисперсной частицы; площадь поверхности дисперсной частицы; объём дисперсной частицы.
В другом частном случае реализации способа дополнительно определяют скорость изменения параметров дисперсной частицы в диапазоне между временными метками, для которых сформированы пространственные модели дисперсной системы.
Ещё в одном частном случае реализации способа в качестве параметров массообмена дисперсной системы выступает по меньшей мере: объём элементарной ячейки массообмена; полный поток дисперсной фазы; объёмный коэффициент массообмена; удельная площадь контакта дисперсной фазы с дисперсионной средой.
В другом частном случае реализации способа параметры массообмена дисперсной системы вычисляют по меньшей мере на основании: усреднения значения физических параметров по меньшей мере для двух временных меток; усреднённых параметров по меньшей мере двух различных дисперсных частиц.
Ещё в одном частном случае реализации способа усреднённое значение параметра определяют по заранее сформированному предельному вероятностному распределению указанного параметра.
В другом частном случае реализации способа дополнительно на основании определённых параметров реакции дисперсной системы формирую команды для средства формирования дисперсной среды на изменения заданных физических параметров дисперсной системы.
Ещё в одном частном случае реализации способа параметры реакции дисперсной системы определяют на основании предварительно заданных экспериментальных значений по меньшей мере: коэффициента диффузии; удельного объема дисперсной фазы; разности концентрации насыщения растворенного вещества дисперсной фазы и концентрации в объёме дисперсионной среды.
В другом частном случае реализации способа дополнительно на основании собранных данных с датчика и определённых параметров реакции дисперсной системы с использованием методов машинного обучения обучают модель, ставящую в соответствие определённым данным с датчика параметры реакции дисперсной системы с заданной вероятностью.
Краткое описание чертежей
Дополнительные цели, признаки и преимущества настоящего изобретения будут очевидными из прочтения последующего описания осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
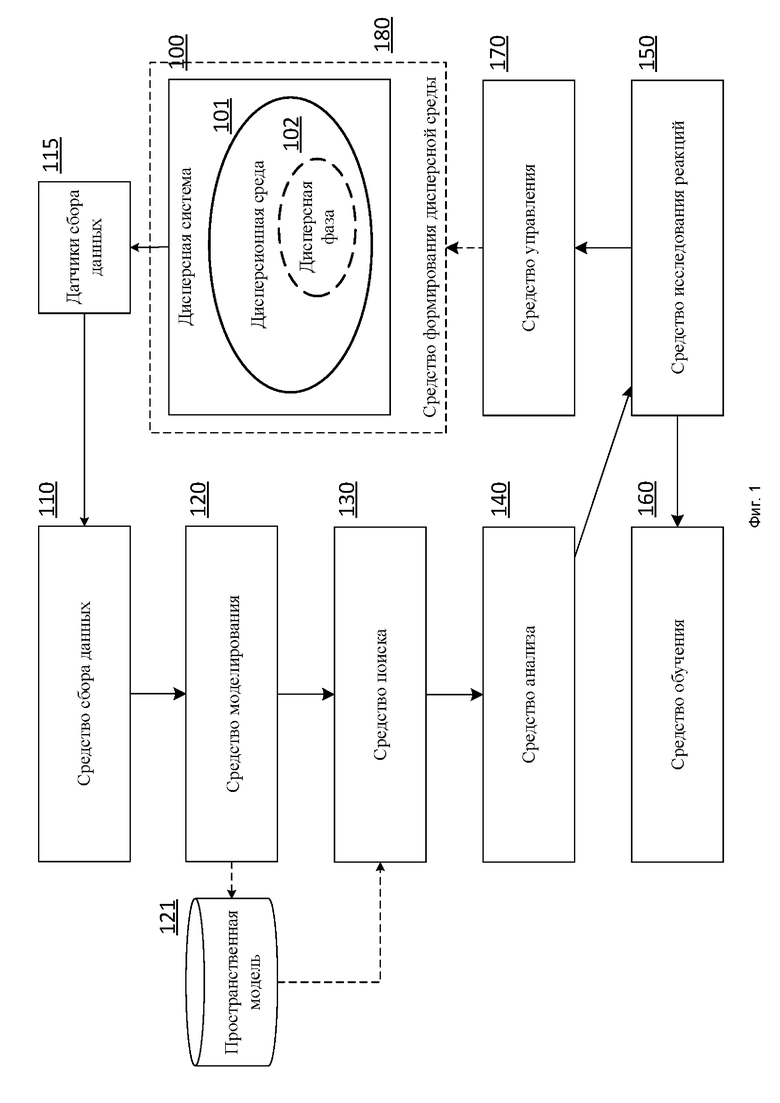
На Фиг. 1 иллюстрируется система определения параметров реакции дисперсной системы.
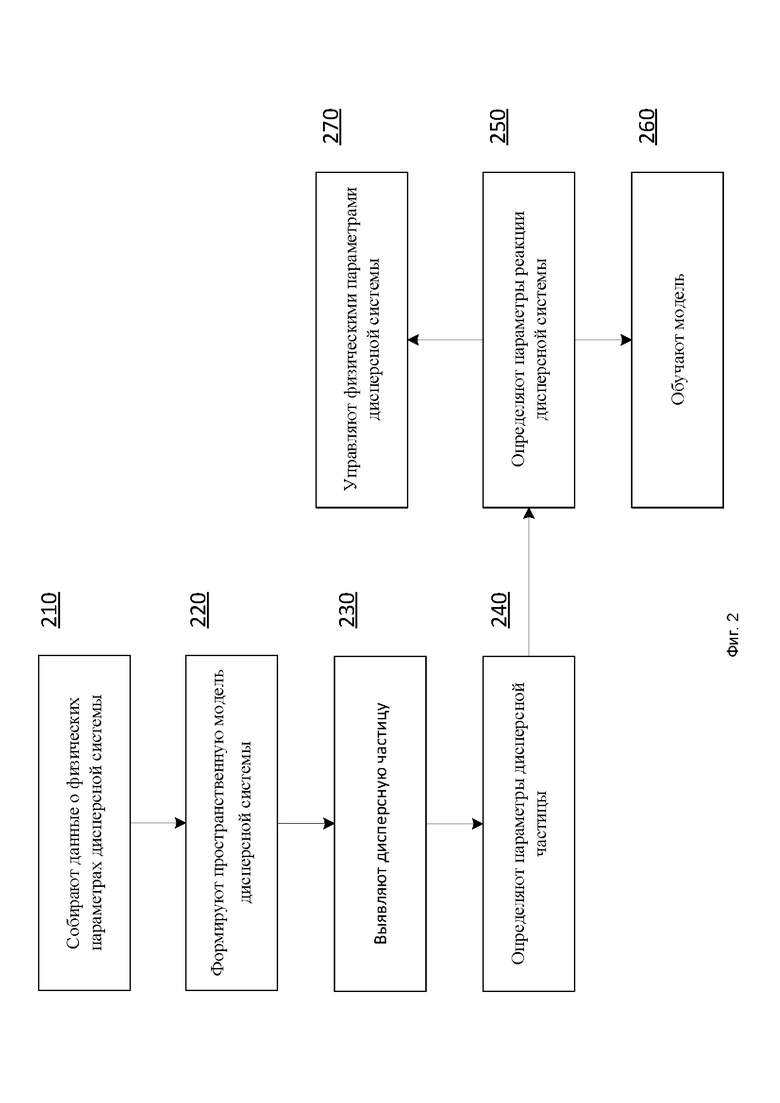
Фиг. 2 иллюстрирует способ определения параметров реакции дисперсной системы.
Фиг. 3 иллюстрирует частный случай установки для работы с дисперсной средой.
Фиг. 4 иллюстрирует частные случаи реализации пространственной модели дисперсной системы.
Фиг. 5 иллюстрирует частный случай выявления дисперсных частиц в сформированной пространственной модели.
Фиг. 6 представляет пример компьютерной системы, с помощью которой может быть реализовано настоящее изобретение.
Осуществление изобретения
Объекты и признаки настоящего изобретения, способы для достижения этих объектов и признаков станут очевидными посредством отсылки к примерным вариантам осуществления. Однако настоящее изобретение не ограничивается примерными вариантами осуществления, раскрытыми ниже, оно может воплощаться в различных видах. Приведённое описание предназначено для помощи специалисту в области техники для исчерпывающего понимания изобретения, которое определяется только в объёме приложенной формулы.
Глоссарий
Дисперсная система (от лат. dispersio «рассеяние») - образования из фаз (тел), которые практически не смешиваются и не реагируют друг с другом химически (Дейч М.Е., Филиппов Г.А. Газодинамика двухфазных сред. – М.: Энергоиздат, 1981). В типичном случае двухфазной системы первое из веществ (дисперсная фаза) мелко распределено во втором (дисперсионная среда). Если фаз несколько, их можно отделить друг от друга физическим способом (центрифугировать, сепарировать и т.д.).
Дисперсионная среда - непрерывная фаза (тело), в объёме которой распределена другая (дисперсная) фаза в виде мелких твёрдых частиц, капелек жидкости или пузырьков газа (Большая советская энциклопедия - 3-е изд., 1986). Д. с. может быть твёрдой, жидкой или газовой; в совокупности с дисперсной фазой она образует дисперсные системы.
Обычно дисперсные системы - это коллоидные растворы (золи). К дисперсным системам относят также случай твёрдой дисперсной среды, в которой находится дисперсная фаза. Растворы высокомолекулярных соединений также обладают всеми свойствами дисперсных систем.
Дисперсная фаза - фаза вещества, которая распределена в дисперсионной среде и не вступает в реакцию с ней в дисперсной системе. Дисперсная фаза может состоять из одинаковых или различных по величине частиц, капель или пузырей. В дисперсной системе может существовать одна и более дисперсных фаз, но при этом нужно учитывать, что дисперсные фазы не вступают в реакцию между собой.
Воксел (англ. voxel - образовано из слов: объёмный (англ. volumetric) и пиксель (англ. pixel)) - элемент объёмного изображения, содержащий значение элемента растра в трёхмерном пространстве. Воксели являются аналогами двумерных пикселей для трёхмерного пространства.
Фиг. 1 иллюстрирует систему определения параметров реакции дисперсной системы.
Система определения параметров реакции дисперсной системы состоит из дисперсной системы 100, дисперсионной среды 101, дисперсной фазы 102, средства сбора данных 110, датчики сбора данных 115, средства моделирования 120, средства поиска 130, средства анализа 140, средства исследования реакций 150, средства обучения 160, средства управления 170, средства формирования дисперсной среды 180.
Дисперсная система 100 содержит дисперсионную среду 101, в которой распределена дисперсная фаза 102.
Средство сбора данных 110 предназначено для сбора данные о физических параметрах дисперсной системы 100 с помощью по меньшей мере одного датчика сбора данных 115 по меньшей мере в двух временных метках.
В одном из вариантов реализации системы в качестве физических параметров дисперсной системы 100 выступают по меньшей мере:
• плотность дисперсной системы 100;
• прозрачность дисперсной системы 100;
• давление дисперсной системы 100;
• кинетическая энергия перемешивания дисперсионной системы 100, включающая по меньшей мере:
○ энергию турбулизации;
• кислотность дисперсной системы 100;
• физико-химический состав дисперсной системы 100, включающий, по меньшей мере:
○ растворенные в дисперсионной среде компоненты;
• температура дисперсной системы 100.
Ещё в одном из вариантов реализации системы в качестве датчика сбора данных 115 выступает по меньшей мере:
• высокоскоростная видеокамера;
• фотодетектор;
• датчик давления;
• датчик кислотности;
• датчик динамического давления;
• датчик растворенного газа;
• датчик ультразвука.
Ещё в одном из вариантов реализации системы датчик сбора данных 115 расположен по меньшей мере:
• внутри дисперсной системы 100 в виде зонда;
• снаружи дисперсной системы 100.
Пример установки для работы с дисперсной средой представлен на Фиг. 3.
Средство моделирования 120 предназначено для формирования пространственной модели 121 дисперсной системы 100 на основании данных, собранных с помощью средства сбора данных 110, для каждой временной метки.
В одном из вариантов реализации системы пространственная модель 121 дисперсной системы 100 представляет собой по меньшей мере:
• графическое растровое изображение, в котором каждому пикселю ставится в соответствие в определённой области дисперсной системы 100 по меньшей мере:
○ тип вещества дисперсной системе 100, в частности по меньшей мере:
- вещество дисперсионной среды 101,
- вещество дисперсной фазы 102,
- вещество внешней среды,
- поверхность, разделяющая дисперсионную среду 101 и дисперсную фазу 102,
- поверхность, разделяющая дисперсную систему 100 и внешнюю среду;
○ параметры дисперсной системы 100, в частности по меньшей мере:
- плотность вещества,
- прозрачность вещества,
- кислотность вещества,
- давление в веществе,
- кинетическая энергия вещества,
- температура вещества;
• графическое векторное изображение, в котором каждая кривая характеризует по меньшей мере:
○ поверхность, разделяющую дисперсионную среду 101 и дисперсную фазу 102,
○ поверхность, разделяющую дисперсную систему 100 и внешнюю среду;
• стереоскопическое растровое изображение, представляющее собой совокупность по меньшей мере двух графических растровых изображений, полученных на основании данных, собранных датчиком сбора данных 115 с использованием эффекта параллакса;
• стереоскопическое векторное изображение, представляющее собой совокупность по меньшей мере двух графических векторных изображений, полученных на основании данных, собранных датчиком сбора данных 115 с использованием эффекта параллакса;
• трёхмерная воксельная модель, в которой каждому вокселю ставится в соответствие в определённой области дисперсной системы 100 по меньшей мере:
○ тип вещества в дисперсной системе, в частности по меньшей мере:
- вещество дисперсионной среды 101,
- вещество дисперсной фазы 102,
- вещество внешней среды,
- поверхность, разделяющая дисперсионную среду 101 и дисперсную фазу 102,
- поверхность, разделяющая дисперсную систему 100 и внешнюю среду;
○ параметры дисперсной системы 100, в частности по меньшей мере:
- плотность вещества,
- прозрачность вещества,
- кислотность вещества,
- давление в веществе,
- кинетическая энергия вещества,
- температура вещества;
• трёхмерная полигональная модель, в которой полигоны описывают элементы по меньшей мере:
○ поверхности, разделяющей дисперсионную среду 101 и дисперсную фазу 102,
○ поверхности, разделяющей дисперсную систему 100 и внешнюю среду;
а каждой вершине полигона ставятся в соответствие в определённой области дисперсной системы 100 параметры дисперсной системы 100, в частности по меньшей мере:
○ плотность вещества,
○ прозрачность вещества,
○ кислотность вещества,
○ давление в веществе,
○ кинетическая энергия вещества,
○ температура вещества.
Примеры реализации пространственной модели дисперсной системы представлены на Фиг. 4.
Ещё в одном из вариантов реализации системы формируют пространственная модель 121 дисперсной системы 100 путём модификации заранее сформированной пространственной модели 121 дисперсной системы 100, содержащей элементы, описывающие по меньшей мере:
• поверхность, разделяющую дисперсионную среду 101 и дисперсную фазу 102,
• поверхность, разделяющую дисперсную систему 100 и внешнюю среду;
• определённую область дисперсной системы 100, которой ставится в соответствие по меньшей мере:
○ тип вещества в дисперсной системе 100, в частности по меньшей мере:
- вещество дисперсионной среды 101,
- вещество дисперсной фазы 102,
- вещество внешней среды,
- поверхность, разделяющая дисперсионную среду 101 и дисперсную фазу 102,
- поверхность, разделяющая дисперсную систему 100 и внешнюю среду;
○ параметры дисперсной системы 100, в частности по меньшей мере:
- плотность вещества,
- прозрачность вещества,
- кислотность вещества,
- давление в веществе,
- кинетическая энергия вещества,
- температура вещества.
для чего модифицируют указанные элементы на основании данных о физических параметрах дисперсной системы 100.
Средство поиска 130 предназначено для выявления по меньшей мере одной дисперсной частицы, представляющей собой замкнутый объём, образованный поверхностью, разделяющей дисперсионную среду 101 и дисперсную фазу 102, на основании сформированных с помощью средства моделирования 120 пространственных моделей 121 дисперсной системы 100.
В одном из вариантов реализации системы для выявления дисперсной частицы в сформированной пространственной модели 121 дисперсной системы 100 используют предварительно обученную модель компьютерного зрения, в частности модель YOLO.
Например, для сегментации пузырей может быть использована обученная на данных ручной разметки нейросетевая модель YOLOv9 (YOLOv9c) из соответствующей библиотеки (Ultralytics. Официальный сайт программной библиотеки Ultralytics. URL: https://github.com/ultralytics/ultralytics (дата обращения 01.02.2024)) c применением встроенного в модуль кода ByteTrack с целью обнаружения координат детектируемых объектов.
Пример реализации выявления дисперсной частицы в пространственной модели 121 представлен на Фиг. 5.
Средство анализа 140 предназначено для определения параметров выявленной с помощью средства поиска 130 дисперсной частицы.
В одном из вариантов реализации системы в качестве параметров дисперсной частицы выступает по меньшей мере:
• скорость перемещения дисперсной частицы по дисперсной системе 100;
• вектор скорости перемещения дисперсной частицы по дисперсной системе 100;
• время жизни дисперсной частицы;
• линейные размеры дисперсной частицы;
• площадь поверхности дисперсной частицы;
• объём дисперсной частицы.
Ещё в одном из вариантов реализации системы средство анализа 140 дополнительно предназначено для определения скорости изменения параметров дисперсной частицы в диапазоне между временными метками для которых сформированы с помощью средства моделирования 120 пространственные модели 121 дисперсной системы 100.
Средство исследования реакций 150 предназначено для определения параметров реакции дисперсной системы 100 на основании определённых с помощью средства анализа 140 параметров.
В одном из вариантов реализации системы в качестве реакции дисперсной системы 100 выступает по меньшей мере:
• физическая реакция, в частности массообмен;
• химическая реакция;
• биологическая реакция.
Ещё в одном из вариантов реализации системы в качестве параметров массообмена дисперсной системы 100 выступает по меньшей мере:
• объём элементарной ячейки массообмена;
• полный поток дисперсной фазы;
• объёмный коэффициент массообмена;
• удельная площадь контакта дисперсной фазы 102 с дисперсионной средой 101.
Ещё в одном из вариантов реализации системы параметры массообмена дисперсной системы 100 вычисляют по меньшей мере на основании:
• усреднения значения физических параметров по меньшей мере для двух временных меток;
• усреднённых параметров по меньшей мере двух различных дисперсных частиц.
Ещё в одном из вариантов реализации системы усреднённое значение параметра определяют по заранее сформированному предельному вероятностному распределению указанного параметра.
Ещё в одном из вариантов реализации системы параметры реакции дисперсной системы 100 определяют на основании предварительно заданных экспериментальных значений по меньшей мере:
• коэффициента диффузии;
• удельного объёма дисперсной фазы;
• разности концентрации насыщения растворенного вещества дисперсной фазы 102 и концентрации в объёме дисперсионной среды 101.
Средство обучения 160 предназначено для обучения модели, ставящей в соответствие определённым данным с датчика сбора данных 115 параметров реакции дисперсной системы 100 с заданной вероятностью на основании собранных с помощь средство сбора данных 110 данных с датчика сбора данных 115 и определённых с помощью средства исследования реакций 150 параметров реакции дисперсной системы 100 с использованием методов машинного обучения.
Средство управления 170 предназначено для формирования команды для средства формирования дисперсной среды 180 на изменения заданных физических параметров дисперсной системы 110 на основании определённых с помощью средства исследования реакций 150 параметров реакции дисперсной системы 110.
Средство формирования дисперсной среды 180 предназначено для изменения физических параметров дисперсной системы 110 на основании команд, сформированных с помощью средства управления 170.
Таким образом, с помощью описанной системы определения параметров реакции дисперсной системы в частном случае реализации становится возможным построение программно-технического комплекса для оценки параметров газожидкостных пузырьковых сред. Совместное использование аналитической математической модели абсорбции газа, данных экспериментов и нейросетевой обработки видео, а также метода обработки данных с усреднением параметров существенно повышают эффективность системы определения параметров реакции дисперсной системы, а именно повышают точность вычисления параметров реакции дисперсной системы, а при использовании впоследствии обученной модели определения таких параметров ещё и скорость их определения.
Применение описанной системы в дальнейшем позволяет перейти к:
• верификации результатов, полученных при работе описанной системы при помощи экспериментов по массообмену;
• введению корректирующих эмпирических коэффициентов перехода для повышения точности способа определения параметров реакции дисперсной системы;
• дополнительному улучшению качества работы описанной системы за счёт перехода к прямому численному моделированию массообмена вокруг пузырей с характеристиками, установленными при помощи методов компьютерного зрения;
• использованию более корректных статистических методов обработки данных, что позволит адекватно обработать выбросы в данных, что уменьшит дисперсию и обеспечит меньшие по величине погрешности.
Фиг. 2 иллюстрирует способ определения параметров реакции дисперсной системы.
Способ определения параметров реакции дисперсной системы содержит этап 210, на котором собирают данные о физических параметрах дисперсной системы, этап 220, на котором формируют пространственную модель дисперсной системы, этап 230, на котором выделяют дисперсную частицу, этап 240, на котором определяют параметры дисперсной частицы, этап 250, на котором определяют параметры реакции дисперсной системы, этап 260, на котором обучают модель, этап 270, на котором управляют физическими параметрами дисперсной системы.
Описываемый способ определения параметров реакции дисперсной системы 100 не зависит от физико-химических свойств дисперсионной среды 101, что позволяет проводить вычисления в режиме реального времени.
На этапе 210 с помощью средства сбора данных 110 с помощью по меньшей мере одного датчика сбора данных 115 собирают данные о физических параметрах дисперсной системы 100 по меньшей мере в двух временных метках.
На этапе 220 с помощью средства моделирования 120 на основании собранных на этапе 210 данных для каждой временной метки формируют пространственную модель 121 дисперсной системы 100.
На этапе 230 с помощью средства поиска 130 на основании сформированных на этапе 220 пространственных моделей 121 дисперсной системы 100 выявляют по меньшей мере одну дисперсную частицу, представляющую собой замкнутый объём, образованный поверхностью, разделяющей дисперсионную среду 101 и дисперсную фазу 102.
На этапе 240 с помощью средства анализа 140 определяют параметры выявленной на этапе 230 дисперсной частицы.
На этапе 250 с помощью средства исследования реакций 150 на основании определённых на этапе 240 параметров определяют параметры реакции дисперсной системы 100.
На этапе 260 дополнительно с помощью средства обучения 160 на основании собранных на этапе 210 данных с датчика сбора данных 115 и определённых на этапе 250 параметров реакции дисперсной системы 100 с использованием методов машинного обучения обучают модель, ставящую в соответствие определённым данным с датчика сбора данных 115 параметры реакции дисперсной системы 100 с заданной вероятностью.
На этапе 270 дополнительно с помощью средства управления 170 управляют физическими параметрами дисперсной системы 100 для чего:
• формируют команды для средства формирования дисперсной среды 180 на изменения заданных физических параметров дисперсной системы 110 на основании определённых на этапе 250 параметров реакции дисперсной системы 110;
• изменяют с помощью средства формирования дисперсной среды 180 физические параметры дисперсной системы 110 на основании сформированных команд.
Рассмотрим пример реализации способа определения параметров реакции дисперсной системы.
1) На этапе 210 с помощью высокоскоростной камеры осуществляется последовательная съёмка дисперсной системы 100, состоящей из жидкости, выступающей в роли дисперсионной среды 101 и растворённого в ней газа, выступающего в роли дисперсной фазы 102, образующего пузыри в качестве дисперсных частиц;
Результатом съёмки являются видеоданные, которые затем на этапе 220 разбиваются на графические растровые изображения (кадры), выступающие в роли пространственных моделей 121 дисперсной системы 100 (пример представлен на изображении 410);
2) Полученные кадры на этапе 230 обрабатывают при помощи модели YOLOv9 (пример результата обработки представлен на Фиг. 5);
Для каждого кадра формируются маски детектируемых объектов (пример представлен на изображении 530), которые выделяют отдельные пузыри;
3) На этапе 240 осуществляют расчёт количества пикселей сформированных масок детектируемых объектов (пузырей, в качестве которых выступают дисперсные частицы) и сохраняют первичную полученную информацию в табличном виде со столбцами [’id’, ’frame index’, ’x’, ’y’, ’mask area’] («идентификатор дисперсной частицы», «номер кадра», «плоскостные координаты дисперсной частицы», «площадь дисперсной частицы»);
4) Далее на том же этапе 240 проводят масштабирование всех расстояний и производных от них (плоскостные координаты дисперсных частиц, площадь дисперсных частиц) путём расчёта расстояния в пикселях в кадре по границам референсной шкалы и сопоставляют размер кадра с физическим размером наблюдаемой области;
На данном этапе по сути переводят результаты из пикселей кадра в метрические единицы (например, миллиметры);
5) Проводят расчёт временного интервала между последовательными кадрами для заданной частоты съёмки камеры;
6) Выполняют расчёт проекций скоростей как разностей координат детектируемых объектов на последовательных кадрах, отнесённых к временному интервалу;
Выполняют расчёт модулей скоростей.
7) Выполняют расчёт радиусов пузырей  по наблюдаемой площади проекции
по наблюдаемой площади проекции  по формуле:
по формуле:
При применении данной формулы исходят из приближения, что форма пузырей близка к шарообразной (и соответственно проекция – к кругу);
8) Выполняют группировку данных и расчёт средних характеристик для каждого кадра: среднего размера пузыря, средней скорости;
9) На этапе 250 задают экспериментальные значения коэффициента диффузии, удельного объёма газовой фазы, разности концентрации насыщения растворенного газа и концентрации в объёме жидкости;
10) Выполняют расчёт объёмов пузырей по средним радиусам на каждом кадре по формуле:

11) Выполняют расчёт объёмов элементарной ячейки массообмена  путём деления получившихся объёмов пузырей на удельный объем газовой фазы по формуле:
путём деления получившихся объёмов пузырей на удельный объем газовой фазы по формуле:
где  - удельный объем газовой фазы в газожидкостной среде;
- удельный объем газовой фазы в газожидкостной среде;
При этом для всего массообменного аппарата  будет иметь смысл объёма газожидкостной среды;
будет иметь смысл объёма газожидкостной среды;
12) Выполняют расчёт полного потока растворенного газа для усреднённых величин для всех кадров по формуле:
где
 - полный поток растворенного газа через площадь контакта газовой и жидкой фаз,
- полный поток растворенного газа через площадь контакта газовой и жидкой фаз,
 - коэффициент диффузии газа в жидкости,
- коэффициент диффузии газа в жидкости,
 - относительная скорость движения пузыря,
- относительная скорость движения пузыря,
 - радиус пузыря,
- радиус пузыря,
 - движущая сила абсорбции (разность концентрации насыщения и концентрации растворенного газа в жидкости).
- движущая сила абсорбции (разность концентрации насыщения и концентрации растворенного газа в жидкости).
Значения для совокупности наблюдаемых пузырей можно соотнести со значением локального коэффициента массоотдачи  и удельной площади контакта фаз
и удельной площади контакта фаз  .
.
13) Выполняют расчёт объёмного коэффициента массообмена  для всех кадров по формуле:
для всех кадров по формуле:
14) Выполняют расчёт удельной площади контакта фаз для усреднённых величин радиусов для всех кадров по формуле:
где
 - средний Заутеровский размер пузыря,
- средний Заутеровский размер пузыря,
 и
и  - диаметр пузыря и количество пузырей данного диаметра соответственно.
- диаметр пузыря и количество пузырей данного диаметра соответственно.
15) Усредняют все искомые параметры по кадрам, расчёт стандартных отклонений для оценки погрешностей.
В основе комбинированного метода оценки параметров массообмена лежит совместное использование данных видеосъемки, их обработка посредством нейросетевого алгоритма, а также математическая модель растворения газовых включений в жидкости. Аналитическая математическая модель абсорбции газа в качестве входных параметров использует экспериментальные данные (коэффициент диффузии, удельный объем газовой фазы, концентрация насыщения растворенного газа и т.д.) наравне с данными, получаемыми после обработки видео системой компьютерного зрения: координат пузырей, их размеров, площадей и скоростей. В качестве исходных данных используются изображения, полученные при видеосъемке высокоскоростной видеокамеры с дополнительным внешним освещением. В частном случае съёмка производится с частотой до 1000 кадров в секунду через смотровые окна экспериментальной массообменной установки, генерирующей пузырьковые течения (см. Фиг. 3).
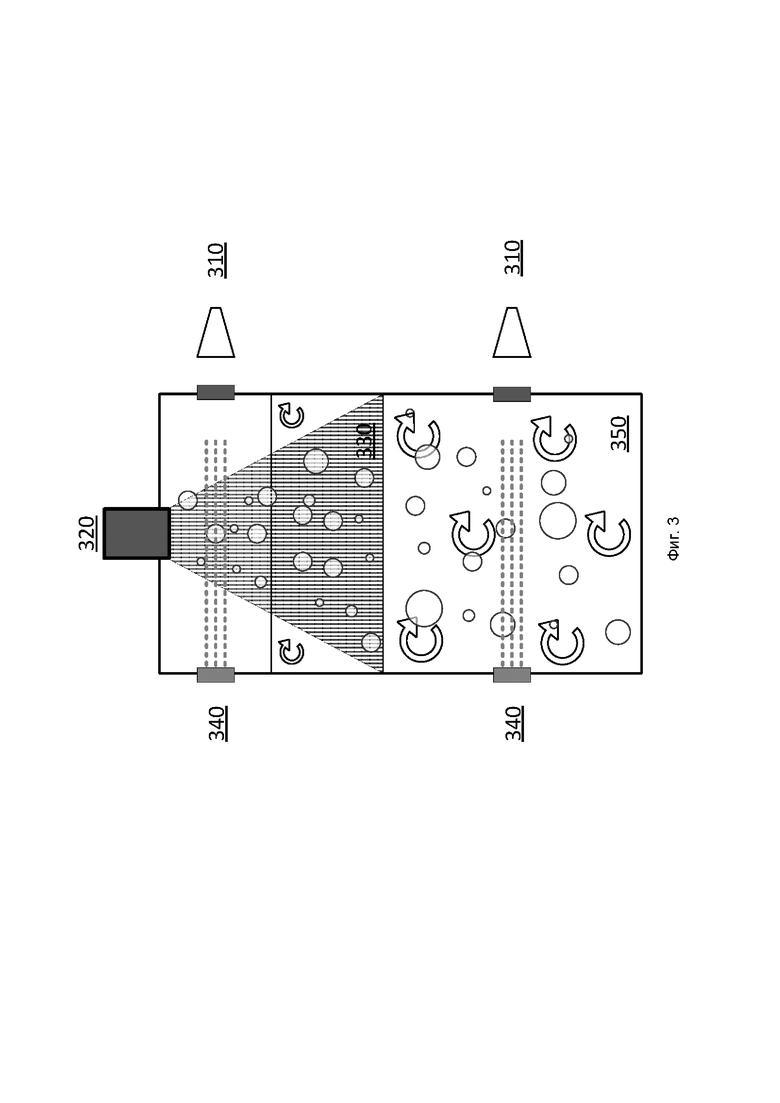
Фиг. 3 иллюстрирует частный случай установки для работы с дисперсной средой.
Установка для работы с дисперсной средой содержит высокоскоростные камеры 310, эжектор 320, струю с дисперсной системой 330, источники света 340, дисперсную систему в рабочем объёме установки 350.
Высокоскоростная камера 310 представляет собой частный случай реализации датчика сбора данных 115 и предназначена для получения растрового изображений высокого разрешения, размещённое в технологически важных местах для наблюдения и записи динамики газожидкостной струи и гидродинамической обстановки в дисперсной системе 110. Указанная камера 310 играет важную роль в мониторинге работы системы в режиме реального времени.
Эжектор 320 предназначен для введения через интенсивную струю жидкости с дисперсной фазой 102 в рабочем объёме аппарата. Эжектор 320 обеспечивает последовательное и эффективное распределение дисперсной фазы 102 в жидкой несущей дисперсионной среде 101.
Струя с дисперсной системой 330 состоит из непогруженного участка струи (имеет наиболее высокое соотношение дисперсной фазы 102 и дисперсионной среды 101) и погруженной части (где дисперсная фаза 102 эффективно диспергируется, усиливая взаимодействие с дисперсионной средой 101 и обеспечивая интенсивный массообмен, химическую и/или биологическую реакцию).
Источник света 340 представляет собой внешнюю лампу или осветительный прибор, который обеспечивает освещение дисперсной системы 100, улучшая видимость через смотровые отверстия и повышая качество фото/видео фиксации с помощью камер 310.
Дисперсная система в рабочем объёме установки 350 представляет собой жидкую двухфазную среду, в которой происходят реакции массообмена, химической и биологической сорбции. Характеризуется интенсивным конвективным перемешиванием.
При указанной конструкции установки для работы с дисперсной средой достигаются следующие результаты:
• поддержание целевого газосодержания в рабочей зоне массообменного аппарата за счёт изменения производительности насоса;
• контроль соответствия параметров газожидкостной струи и достигаемого газосодержания в рабочей зоне массообменного аппарата. В случае обнаружения несоответствия работа устройства считается нештатной и формируется предупреждающий сигнал.
В частном случае реализации указанной установки система определения параметров реакции дисперсной системы (или ее средства) может быть объединена с иными инструментальными методами контроля струи и рабочей зоны массообменного аппарата (датчик растворенного кислорода, датчик оптической плотности, датчик температуры, газоанализатор и т.д.).
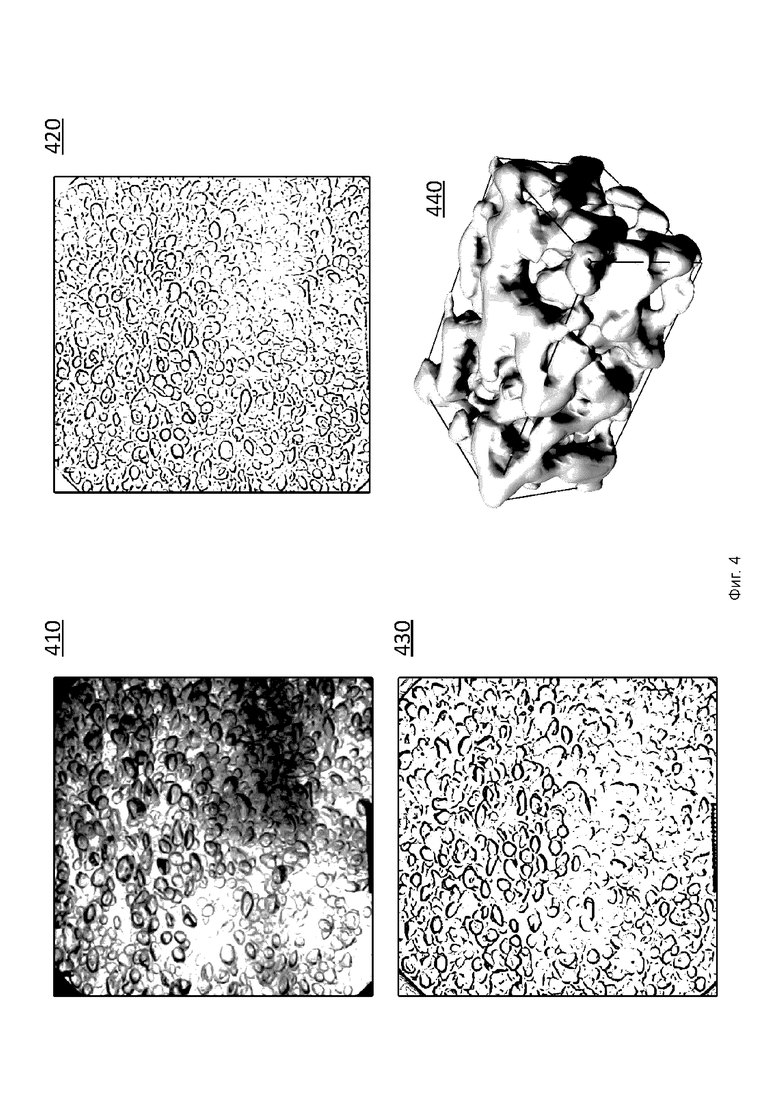
Фиг. 4 иллюстрирует частные случаи реализации пространственной модели дисперсной системы.
В частном случае в качестве пространственной модели 121 дисперсной системы 100 выступает графическое растровое изображение 410, графическое векторное изображение 420, стереоскопическое векторное изображение 430, трёхмерная полигональная модель 440.
В качестве примера растрового графического изображения 410 выступает изображение дисперсной системы 100, полученное с помощью высокоскоростной камеры (в качестве датчика сбора данных 115). Камерой фиксировалось прозрачность вещества дисперсионной среды 101 (более светлое на изображении) и дисперсной фазы 102 (более тёмное на изображении).
Каждый пиксель растрового графического изображения 410 характеризует интегральную прозрачность в дисперсной системе 100 вдоль определённого направления.
Наиболее эффективно при анализе растрового графического изображения 410 выявляют дисперсные частицы (пузырьки) расположенные наиболее близко к высокочастотной камере, однако для широкого диапазона прозрачности дисперсной системы 101 (и в частности дисперсной фазы 102) становится возможным выявления дисперсных частиц, расположенных на значительном расстоянии от высокочастотной камеры, полностью или частично перекрытых другими дисперсными частицами.
В качестве примера графического векторного изображения 420 выступает изображение дисперсной системы 100, полученное с помощью ультразвукового датчика (в качестве датчика сбора данных 115). Ультразвуковым датчиком фиксировалась перепад плотности вещества дисперсионной среды 101 и дисперсной фазы 102 (чёрные кривые).
Каждая кривая графического векторного изображения 420 характеризует область пространства дисперсной среды 100, в которой сформирована поверхность, разделяющую дисперсионную среду 101 и дисперсную фазу 102 или поверхность, разделяющую дисперсную систему 100 и внешнюю среду.
В качестве примера стереоскопическое векторное изображение 430 выступают два изображения дисперсной системы 100, полученные с помощью ультразвукового датчика (в качестве датчика сбора данных 115) в двух пространственных позициях, что создавало параллакс при формировании итогового изображения. Ультразвуковым датчиком фиксировалась перепад плотности вещества дисперсионной среды 101 и дисперсной фазы 102 (чёрные кривые).
Красным цветом на стереоскопическом векторном изображении 430 выделено графическое векторное изображение, полученное левым ультразвуковым датчиком, зелёным цветом – графическое векторное изображение, полученное правым ультразвуковым датчиком.
В качестве примера трёхмерной полигональной модели 440 выступает изображение дисперсной системы 100, в которой полигоны описывают элементы поверхности, разделяющей дисперсионную среду 101 и дисперсную фазу 102.
Вершина каждого полигона описывается 3 пространственными (x, y, z) и одним внутренним параметром (плотностью среды).
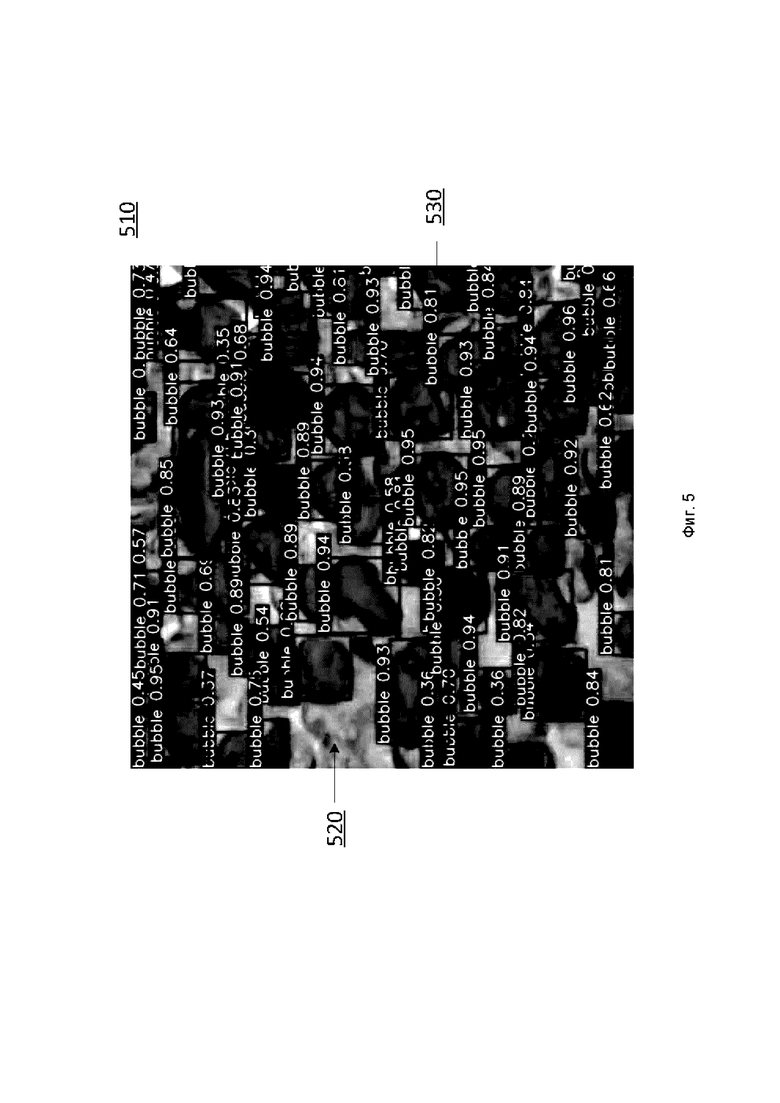
Фиг. 5 иллюстрирует частный случай выявления дисперсных частиц в сформированной пространственной модели.
В частном случае реализации системы определения параметров реакции дисперсной системы в качестве пространственной модели 121 дисперсной системы 100 выступает графическое растровое изображение 510, содержащее дисперсионную среду 101 и дисперсную фазу 102, которые формирую многочисленные дисперсные частицы.
С помощью обученной модели компьютерного зрения YOLO графическое растровое изображение 510 дисперсной системы 100 разделяется на дисперсионную среду 520 (отображена серым) и дисперсную фазу 530 (отображена красным).
Дисперсная фаза разделяется на дисперсные частицы для каждой из которых определяются положение в дисперсной системе 100 и физические размеры (отображены красным квадратом).
Информация о дисперсных частицах в одном из случаев реализации системы сохраняется для дальнейшего анализа в виде таблицы, содержащей информацию о выделенных дисперсных частицах (каждой частице даётся свой уникальный идентификатор) и их параметрах (физических размерах, положении в дисперсной системе и т.д.).
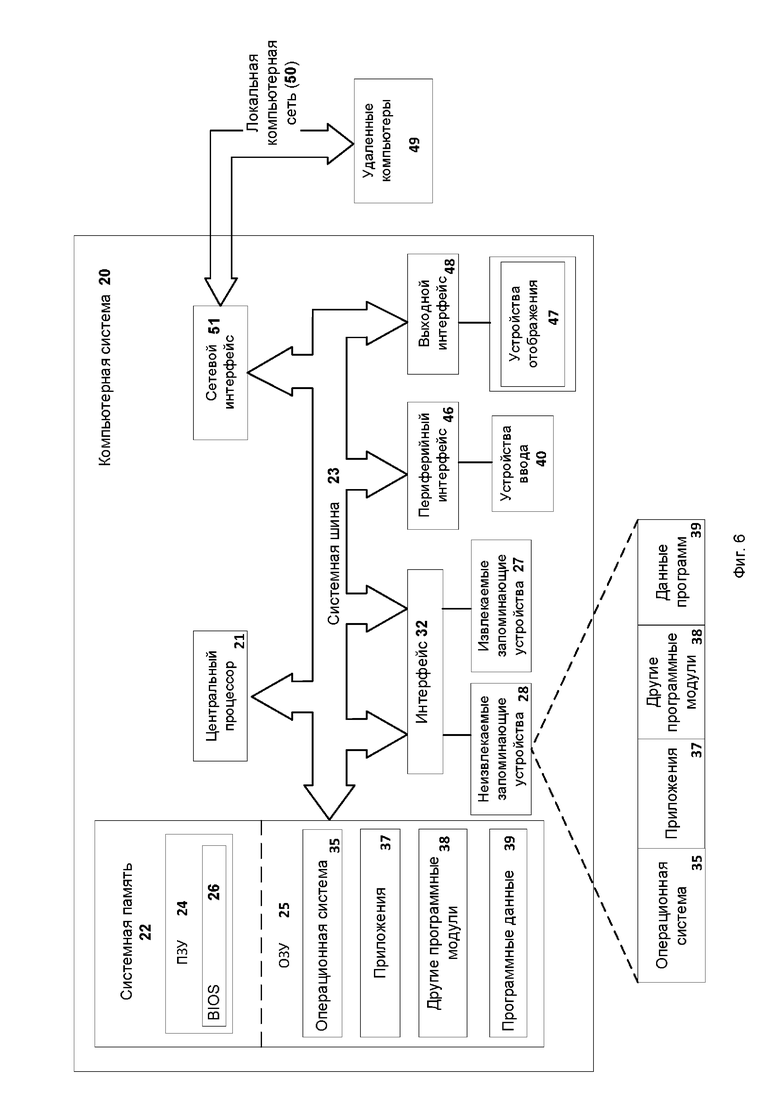
На Фиг. 6 представлена компьютерная система, на которой могут быть реализованы различные варианты систем и способов, раскрытых в настоящем документе. Компьютерная система 20 может представлять собой систему, сконфигурированную для реализации настоящего изобретения и может быть представлена в виде одного вычислительного устройства или в виде нескольких вычислительных устройств, например, настольного компьютера, портативного компьютера, ноутбука, сервера, мейнфрейма, встраиваемого устройства и других форм вычислительных устройств.
Как показано на Фиг. 6, компьютерная система 20 включает в себя: центральный процессор 21, системную память 22 и системную шину 23, которая связывает разные системные компоненты, в том числе память, связанную с центральным процессором 21. Системная шина 23 реализована, как любая известная из уровня техники шинная структура, содержащая в свою очередь память шины или контроллер памяти шины, периферийную шину и локальную шину, способную взаимодействовать с любой другой шинной архитектурой. Примерами шин являются: PCI, ISA, PCI-Express, HyperTransport™, InfiniBand™, Serial ATA, I2C и другие подходящие соединения между компонентами компьютерной системы 20. Центральный процессор 21 содержит один или несколько процессоров, имеющих одно или несколько ядер. Центральный процессор 21 исполняет один или несколько наборов машиночитаемых инструкций, реализующих способы, представленные в настоящем документе. Системная память 22 может быть любой памятью для хранения данных и/или компьютерных программ, исполняемых центральным процессором 21. Системная память может содержать как постоянное запоминающее устройство (ПЗУ) 24, так и память с произвольным доступом (ОЗУ) 25. Основная система ввода/вывода (BIOS) 26, содержит основные процедуры, которые обеспечивают передачу информации между элементами компьютерной системы 20, например, в момент загрузки операционной системы с использованием ПЗУ 24.
Компьютерная система 20 включает в себя одно или несколько устройств хранения данных, таких как одно или несколько извлекаемых запоминающих устройств 27, одно или несколько неизвлекаемых запоминающих устройств 28, или комбинации извлекаемых и неизвлекаемых устройств. Одно или несколько извлекаемых запоминающих устройств 27 и/или неизвлекаемых запоминающих устройств 28 подключены к системной шине 23 через интерфейс 32. В одном из вариантов реализации, извлекаемые запоминающие устройства 27 и соответствующие машиночитаемые носители информации, представляют собой энергонезависимые модули для хранения компьютерных инструкций, структур данных, программных модулей и других данных компьютерной системы 20. Системная память 22, извлекаемые запоминающие устройства 27 и неизвлекаемые запоминающие устройства 28 могут использовать различные машиночитаемые носители информации. Примеры машиночитаемых носителей информации включают в себя машинную память, такую как кэш-память, SRAM, DRAM, ОЗУ не требующую конденсатора (Z-RAM), тиристорную память (T-RAM), eDRAM, EDO RAM, DDR RAM, EEPROM, NRAM, RRAM, SONOS, PRAM; флэш-память или другие технологии памяти, такие как твердотельные накопители (SSD) или флэш-накопители; магнитные кассеты, магнитные ленты и магнитные диски, такие как жесткие диски или дискеты; оптические носители, такие как компакт-диски (CD-ROM) или цифровые универсальные диски (DVD); и любые другие носители, которые могут быть использованы для хранения нужных данных и к которым может получить доступ компьютерная система 20.
Системная память 22, извлекаемые запоминающие устройства 27 и неизвлекаемые запоминающие устройства 28, содержащиеся в компьютерной системе 20 используются для хранения операционной системы 35, приложений 37, других программных модулей 38 и программных данных 39. Компьютерная система 20 включает в себя периферийный интерфейс 46 для передачи данных от устройств ввода 40, таких как клавиатура, мышь, стилус, игровой контроллер, устройство голосового ввода, устройство сенсорного ввода, или других периферийных устройств, таких как принтер или сканер через один или несколько портов ввода/вывода, таких как последовательный порт, параллельный порт, универсальная последовательная шина (USB) или другой периферийный интерфейс. Устройство отображения 47, такое как один или несколько мониторов, проекторов или встроенных дисплеев, также подключено к системной шине 23 через выходной интерфейс 48, такой как видеоадаптер. Помимо устройств отображения 47, компьютерная система 20 оснащена другими периферийными устройствами вывода (на Фиг. 14 не показаны), такими как динамики и другие аудиовизуальные устройства.
Компьютерная система 20 может работать в сетевом окружении, используя сетевое соединение с одним или несколькими удалёнными компьютерами 49. Удалённый компьютер (или компьютеры) 49 является рабочим персональным компьютером или сервером, который содержит большинство или все упомянутые компоненты, отмеченные ранее при описании сущности компьютерной системы 20, представленной на Фиг. 6. В сетевом окружении также могут присутствовать и другие устройства, например, маршрутизаторы, сетевые станции или другие сетевые узлы. Компьютерная система 20 может включать один или несколько сетевых интерфейсов 51 или сетевых адаптеров для связи с удалёнными компьютерами 49 через одну или несколько сетей, таких как локальная компьютерная сеть (LAN) 50, глобальная компьютерная сеть (WAN), интранет и Интернет. Примерами сетевого интерфейса 51 являются интерфейс Ethernet, интерфейс Frame Relay, интерфейс SONET и беспроводные интерфейсы.
Варианты раскрытия настоящего изобретения могут представлять собой систему, способ, или машиночитаемый носитель (или носитель) информации.
Машиночитаемый носитель информации является осязаемым устройством, которое сохраняет и хранит программный код в форме машиночитаемых инструкций или структур данных, к которым имеет доступ центральный процессор 21 компьютерной системы 20. Машиночитаемый носитель может быть электронным, магнитным, оптическим, электромагнитным, полупроводниковым запоминающим устройством или любой подходящей их комбинацией. В качестве примера, такой машиночитаемый носитель информации может включать в себя память с произвольным доступом (RAM), память только для чтения (ROM), EEPROM, портативный компакт-диск с памятью только для чтения (CD-ROM), цифровой универсальный диск (DVD), флэш-память, жёсткий диск, портативную компьютерную дискету, карту памяти, дискету или даже механически закодированное устройство, такое как перфокарты или рельефные структуры с записанными на них инструкциями.
Система и способ настоящего изобретения, могут быть рассмотрены в терминах средств. Термин «средство», используемый в настоящем документе, относится к реальному устройству, компоненту или группе компонентов, реализованных с помощью аппаратного обеспечения, например, с помощью интегральной схемы, специфичной для конкретного приложения (ASIC) или FPGA, или в виде комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора машиночитаемых инструкций для реализации функциональности средства, которые (в процессе выполнения) превращают микропроцессорную систему в устройство специального назначения. Средство также может быть реализовано в виде комбинации этих двух компонентов, при этом некоторые функции могут быть реализованы только аппаратным обеспечением, а другие функции - комбинацией аппаратного и программного обеспечения. В некоторых вариантах реализации, по крайней мере, часть, а в некоторых случаях и все средство может быть выполнено на центральном процессоре 21 компьютерной системы 20. Соответственно, каждое средство может быть реализовано в различных подходящих конфигурациях и не должно ограничиваться каким-либо конкретным вариантом реализации, приведённым в настоящем документе.
В заключение следует отметить, что приведённые в описании сведения являются примерами, которые не ограничивают объем настоящего изобретения, определённого формулой. Специалисту в данной области становится понятным, что при разработке любого реального варианта осуществления настоящего изобретения необходимо принять множество решений, специфических для конкретного варианта осуществления, для достижения конкретных целей, и эти конкретные цели будут разными для разных вариантов осуществления. Понятно, что такие усилия по разработке могут быть сложными и трудоёмкими, но, тем не менее, они будут обычной инженерной задачей для тех, кто обладает обычными навыками в данной области, пользуясь настоящим раскрытием изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ установки персонализированного приложения на мобильное устройство | 2021 |
|
RU2786200C1 |
| Система и способ невербальной активации сервиса на мобильном устройстве | 2019 |
|
RU2746201C2 |
| КОМПОЗИЦИИ ЭЛАСТИЧНОГО ГАЗОНЕПРОНИЦАЕМОГО ПОКРЫТИЯ | 2015 |
|
RU2684077C2 |
| Способ признания вызова нежелательным | 2022 |
|
RU2799571C1 |
| ВИРТУАЛЬНОЕ ИНТЕРАКТИВНОЕ ОПРЕДЕЛЕНИЕ ОБЪЁМНЫХ ФОРМ | 2015 |
|
RU2667976C1 |
| Способ классификации вызова | 2022 |
|
RU2820019C1 |
| Способ детекции вмятин на элементах кузова транспортных средств и устройство для реализации данного способа | 2021 |
|
RU2763307C2 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2733976C2 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРИ ПОМОЩИ КОМБИНИРОВАННОЙ СИСТЕМЫ НАБЛЮДЕНИЙ | 2024 |
|
RU2839553C1 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2605392C1 |
Изобретение относится к объединению биотехнологии, микробиологической промышленности и технологического инжиниринга. Способ определения параметров реакции дисперсной системы, содержащей дисперсионную среду, в которой распределена дисперсная фаза, по которому: а) с помощью по меньшей мере одного датчика собирают данные о физических параметрах дисперсной системы по меньшей мере в двух временных метках; б) на основании собранных данных для каждой временной метки формируют пространственную модель дисперсной системы; в) на основании сформированных пространственных моделей дисперсной системы выявляют по меньшей мере одну дисперсную частицу, представляющую собой замкнутый объём, образованный поверхностью, разделяющей дисперсионную среду и дисперсную фазу; г) определяют параметры выявленной дисперсной частицы; д) на основании определённых параметров определяют параметры реакции дисперсной системы. Техническим результатом является определение и управление параметрами реакции дисперсной системы. 15 з.п. ф-лы, 6 ил. 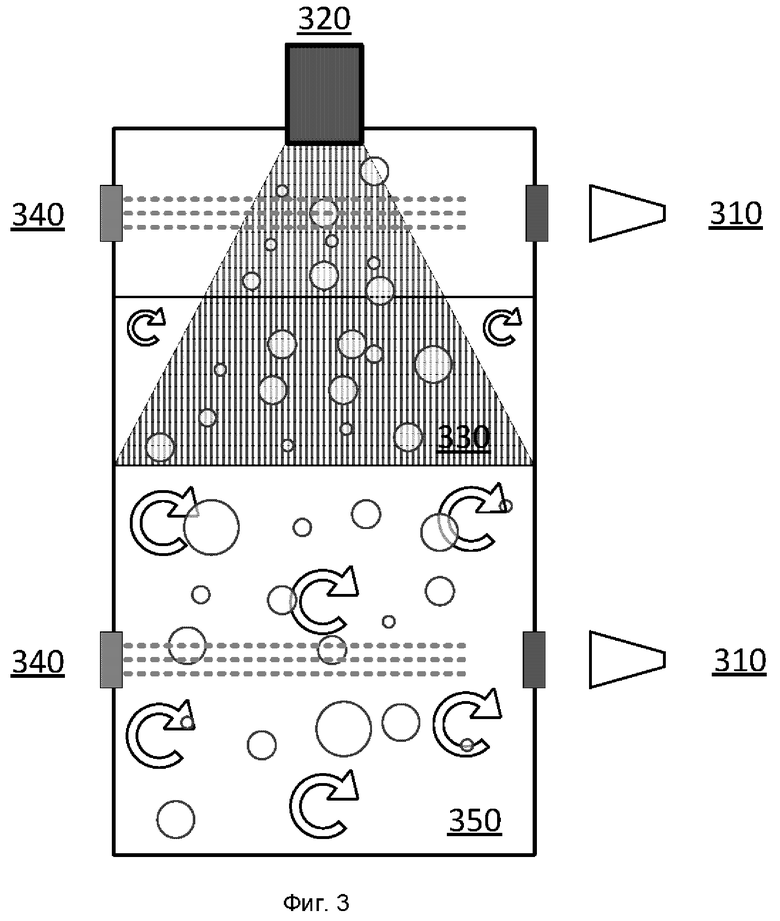
1. Способ определения параметров реакции дисперсной системы, содержащей дисперсионную среду, в которой распределена дисперсная фаза, по которому:
а) с помощью по меньшей мере одного датчика собирают данные о физических параметрах дисперсной системы по меньшей мере в двух временных метках;
б) на основании собранных данных для каждой временной метки формируют пространственную модель дисперсной системы;
в) на основании сформированных пространственных моделей дисперсной системы выявляют по меньшей мере одну дисперсную частицу, представляющую собой замкнутый объём, образованный поверхностью, разделяющей дисперсионную среду и дисперсную фазу;
г) определяют параметры выявленной дисперсной частицы;
д) на основании определённых параметров определяют параметры реакции дисперсной системы.
2. Способ по п.1, по которому в качестве реакции дисперсной системы выступает по меньшей мере:
физическая реакция, в частности массообмен;
химическая реакция;
биологическая реакция.
3. Способ по п.1, по которому в качестве физических параметров дисперсной системы выступают по меньшей мере:
плотность дисперсной системы;
прозрачность дисперсной системы;
давление дисперсной системы;
кинетическая энергия перемешивания дисперсионной системы, включающая по меньшей мере энергию турбулизации;
кислотность дисперсной системы;
физико-химический состав дисперсной системы, включающий по меньшей мере растворенные в дисперсионной среде компоненты;
температура дисперсной системы.
4. Способ по п.1, по которому в качестве датчика выступает по меньшей мере:
высокоскоростная видеокамера;
фотодетектор;
датчик давления;
датчик кислотности;
датчик динамического давления;
датчик растворенного газа;
датчик ультразвука.
5. Способ по п.1, по которому датчик расположен по меньшей мере:
внутри дисперсной системы в виде зонда;
снаружи дисперсной системы.
6. Способ по п.1, по которому пространственная модель дисперсной системы представляет собой по меньшей мере:
графическое растровое изображение, в котором каждому пикселю ставится в соответствие в определённой области дисперсной системы по меньшей мере:
- тип вещества дисперсной системе, в частности по меньшей мере: вещество дисперсионной среды, вещество дисперсной фазы, вещество внешней среды, поверхность, разделяющая дисперсионную среду и дисперсную фазу, поверхность, разделяющая дисперсную систему и внешнюю среду;
- параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества;
графическое векторное изображение, в котором каждая кривая характеризует по меньшей мере:
- поверхность, разделяющую дисперсионную среду и дисперсную фазу,
- поверхность, разделяющую дисперсную систему и внешнюю среду;
стереоскопическое растровое изображение, представляющее собой совокупность по меньшей мере двух графических растровых изображений, полученных на основании данных, собранных датчиком с использованием эффекта параллакса;
стереоскопическое векторное изображение, представляющее собой совокупность по меньшей мере двух графических векторных изображений, полученных на основании данных, собранных датчиком с использованием эффекта параллакса;
трёхмерная воксельная модель, в которой каждому вокселю ставится в соответствие в определённой области дисперсной системы по меньшей мере:
- тип вещества в дисперсной системе, в частности по меньшей мере: вещество дисперсионной среды, вещество дисперсной фазы, вещество внешней среды, поверхность, разделяющая дисперсионную среду и дисперсную фазу, поверхность, разделяющая дисперсную систему и внешнюю среду;
- параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества;
трёхмерная полигональная модель, в которой полигоны описывают элементы по меньшей мере:
- поверхности, разделяющей дисперсионную среду и дисперсную фазу,
- поверхности, разделяющей дисперсную систему и внешнюю среду;
а каждой вершине полигона ставятся в соответствие в определённой области дисперсной системы параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества.
7. Способ по п.1, по которому формируют пространственную модель дисперсной системы путём модификации заранее сформированной пространственной модели дисперсной системы, содержащей элементы, описывающие по меньшей мере:
поверхность, разделяющую дисперсионную среду и дисперсную фазу,
поверхность, разделяющую дисперсную систему и внешнюю среду;
определённую область дисперсной системы, которой ставится в соответствие по меньшей мере:
- тип вещества в дисперсной системе, в частности по меньшей мере: вещество дисперсионной среды, вещество дисперсной фазы, вещество внешней среды, поверхность, разделяющая дисперсионную среду и дисперсную фазу, поверхность, разделяющая дисперсную систему и внешнюю среду;
- параметры дисперсной системы, в частности по меньшей мере: плотность вещества, прозрачность вещества, кислотность вещества, давление в веществе, кинетическая энергия вещества, температура вещества;
для чего модифицируют указанные элементы на основании данных о физических параметрах дисперсной системы.
8. Способ по п.1, по которому для выявления дисперсной частицы в сформированной пространственной модели дисперсной системы используют предварительно обученную модель компьютерного зрения, в частности модель YOLO.
9. Способ по п.1, по которому в качестве параметров дисперсной частицы выступает по меньшей мере:
скорость перемещения дисперсной частицы по дисперсной системе;
вектор скорости перемещения дисперсной частицы по дисперсной системе;
время жизни дисперсной частицы;
линейные размеры дисперсной частицы;
площадь поверхности дисперсной частицы;
объём дисперсной частицы.
10. Способ по п.8, по которому дополнительно определяют скорость изменения параметров дисперсной частицы в диапазоне между временными метками, для которых сформированы пространственные модели дисперсной системы.
11. Способ по п.1, по которому в качестве параметров массообмена дисперсной системы выступает по меньшей мере:
объём элементарной ячейки массообмена;
полный поток дисперсной фазы;
объёмный коэффициент массообмена;
удельная площадь контакта дисперсной фазы с дисперсионной средой.
12. Способ по п.11, по которому параметры массообмена дисперсной системы вычисляют по меньшей мере на основании:
усреднения значения физических параметров по меньшей мере для двух временных меток;
усреднённых параметров по меньшей мере двух различных дисперсных частиц.
13. Способ по п.12, по которому усреднённое значение параметра определяют по заранее сформированному предельному вероятностному распределению указанного параметра.
14. Способ по п.1, по которому дополнительно на основании определённых параметров реакции дисперсной системы формируют команды для средства формирования дисперсной среды на изменения заданных физических параметров дисперсной системы.
15. Способ по п.1, по которому параметры реакции дисперсной системы определяют на основании предварительно заданных экспериментальных значений по меньшей мере:
коэффициента диффузии;
удельного объема дисперсной фазы;
разности концентрации насыщения растворенного вещества дисперсной фазы и концентрации в объёме дисперсионной среды.
16. Способ по п.1, по которому дополнительно на основании собранных данных с датчика и определённых параметров реакции дисперсной системы с использованием методов машинного обучения обучают модель, ставящую в соответствие определённым данным с датчика параметры реакции дисперсной системы с заданной вероятностью.
| STARODUMOV I | |||
| et al | |||
| MEASUREMENT OF MASS TRANSFER INTENSITY IN GAS-LIQUID MEDIUM OF BIOREACTOR CIRCUIT USING THE THERMOMETRY METHOD, FLUIDS, v | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Саморазгружающаяся железнодорожная платформа | 1921 |
|
SU366A1 |
| PETERSEN L.A | |||
| et al | |||
| MIXING AND MASS TRANSFER IN A PILOT SCALE U-LOOP BIOREACTOR, BIOTECHNOLOGY AND BIOENGINEERING, v | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Способ получения жидкой протравы для основных красителей | 1923 |
|
SU344A1 |
| US 20230176024 A1, 08.06.2023 | |||
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |

