Область техники, к которой относится изобретение
Настоящее изобретение относится без ограничения к области каротажа, в частности к способу устранения шума и устройству для устранения шума для системы измерения во время бурения (MWD), и носителю данных.
Предпосылки изобретения
Систему измерения во время бурения (MWD) используют для измерения геологических и технологических параметров в скважине в реальном времени во время бурения. Систему демодуляции гидроимпульсных данных во время бурения используют для передачи данных, измеренных системой MWD, из-под земли на поверхность в реальном времени. Система передачи гидроимпульсных данных во время бурения использует эффект перехвата бурового раствора, генерируемый перемещением генератора импульсов, для создания колебания давления бурового раствора и модулирует цифровой сигнал в волне давления бурового раствора для передачи его на поверхность, тем самым обеспечивая передачу данных измерений в скважине в реальном времени на поверхность. Система передачи гидроимпульсных данных во время бурения содержит три главных функциональных модуля: механизм генерирования гидроимпульса, канал передачи сигнала бурового раствора и систему сбора и демодуляции волн давления. Механизм генерирования гидроимпульса представляет собой главным образом генератор импульсов и генерируемые импульсные сигналы могут быть разделены на три категории: положительный импульс, отрицательный импульс и импульс непрерывной волны. Главным принципом механизма генерирования гидроимпульсов является эффект перехвата в отношении бурового раствора. Канал передачи сигнала бурового раствора содержит трубопровод для циркуляции всей буровой жидкости, который в направлении вверх содержит насос для бурового раствора, коллектор, водоотделяющую колонну, шланг и различные соединения, через которые течет буровой раствор, и в направлении вниз содержит бурильную трубу, несколько приборов для каротажа, переходник канала потока, направляющий ниппель, буровое долото и отражающую поверхность забоя и т.д. Через канал передачи сигнала бурового раствора волны давления бурового раствора передают из скважины к ее устью и каждая часть приводит к наложенным характеристикам шума или затухания волн давления бурового раствора. Система сбора и демодуляции волн давления содержит датчик давления, выполненный с возможностью преобразования волн давления бурового раствора в электрические сигналы, и систему демодуляции, выполненную с возможностью обработки электрических сигналов и демодуляции их в значимые данные.
Система передачи сигнала бурового раствора содержит различные устройства и приборы со сложными структурами и характеристиками механического движения и эти устройства и приборы накладывают шум на гидроимпульсный сигнал и отрицательно влияют на качество гидроимпульсного сигнала. Эти наложенные шумы обычно генерируются конкретными механическими структурами и главным образом включают три типа. Первым типом является периодический шум, такой как шум насоса для бурового раствора, шум вращения двигателя, шум верхнего привода, шум вращения роторного стола и т.д. Вторым типом является апериодический шум, который главным образом показывает затухание сигналов, такой как шум, генерируемый переходником канала потока, измененным диаметром канала потока, структурой насадки бурового долота и т.д. Третьим типом является мгновенный шум, генерируемый только при особых обстоятельствах, таких как временное засорение насадки бурового долота. Эти шумы смешиваются с образованием наложенного шума, который в совокупности отрицательно влияет на качество гидроимпульсного сигнала.
В некоторых технологиях для системы демодуляции данных гидроимпульса во время бурения принятые способы устранения шума включают способ устранения шума насоса во временной области и способ устранения высокочастотного электрического шума в частотной области и т.д. Вышеописанные технологии не могут обеспечить удовлетворительное устранение шума при периодических шумовых помехах, которые могут легко привести к искажению сигналов бурового раствора.
Сущность изобретения
Ниже следует краткое описание объектов изобретения, подробно описанных в данном документе. Это краткое описание не предназначено для ограничения объема правовой охраны формулы изобретения.
Вариант осуществления настоящего изобретения предусматривает способ устранения шума для системы измерения во время бурения (MWD), который обеспечивает подавление периодического шума в частотной области и может эффективно устранять помехи периодического шума.
В одном аспекте вариант осуществления настоящего изобретения предусматривает способ устранения шума для системы измерения во время бурения (MWD), включающий:
прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора;
выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и
получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом.
В иллюстративном варианте осуществления прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора;
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса; и
определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора; и
если сигнал хода насоса не может быть получен, но заданная частота любого одного или нескольких типов сигналов периодического шума может быть получена, определение полученной заданной частоты любого одного или нескольких типов сигналов периодического шума как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора; и
определение, согласно спектру частот сигнала бурового раствора, центральной частоты сигнала периодического шума в сигнале бурового раствора как характерной частоты сигнала периодического шума в сигнале бурового раствора, если какой-либо тип сигнала периодического шума не может быть получен.
В иллюстративном варианте осуществления сигнал бурового раствора представляет собой:
 где
где  представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора,  представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
перед выполнением преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области способ дополнительно включает:
ввод сигнала бурового раствора в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
В иллюстративном варианте осуществления сигнал хода насоса представляет собой:
 где
где  представляет собой вектор входного сигнала хода насоса,
представляет собой вектор входного сигнала хода насоса,  представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
В иллюстративном варианте осуществления ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, включает: ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, для получения сигнала хода насоса  в буфере сигналов хода насоса:
в буфере сигналов хода насоса:
 где
где  представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,
представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,  представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
В иллюстративном варианте осуществления определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
расчет средней частоты хода насоса сигнала хода насоса в буфере сигналов хода насоса согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса; и
определение полученной средней частоты хода насоса сигнала хода насоса как характерной частоты сигнала периодического шума в сигнале бурового раствора;
при этом формула расчета средней частоты хода насоса включает:
 представляет собой среднюю частоту хода насоса сигнала хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой
представляет собой среднюю частоту хода насоса сигнала хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой 
 представляет собой момент времени, соответствующий переднему фронту,
представляет собой момент времени, соответствующий переднему фронту,  и L+1 представляет собой количество передних фронтов.
и L+1 представляет собой количество передних фронтов.
В иллюстративном варианте осуществления выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области включает:
оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора для получения подвергнутого оконному преобразованию сигнала бурового раствора; и
выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора для получения сигнала бурового раствора в частотной области.
В иллюстративном варианте осуществления получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом, включает:
определение частоты коэффициента подавления согласно характерной частоте сигнала периодического шума в сигнале бурового раствора; и
умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом коэффициент подавления включает:
αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет 
 представляет собой характерную частоту;
представляет собой характерную частоту;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области; '
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области; ' представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,
представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора, 
 представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде; и
представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде; и  указывает на округление в меньшую сторону.
указывает на округление в меньшую сторону.
В другом аспекте вариант осуществления настоящего изобретения дополнительно предусматривает устройство для устранения шума для системы измерения во время бурения (MWD), содержащее запоминающее устройство и процессор;
при этом запоминающее устройство выполнено с возможностью хранения программы для устранения шума для системы MWD; и
процессор выполнен с возможностью чтения и выполнения программы для устранения шума для системы MWD, а также выполнения следующих операций:
прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора;
выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и
получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом.
В иллюстративном варианте осуществления прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора;
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса; и
определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора; и
если сигнал хода насоса не может быть получен, но заданная частота любого одного или нескольких типов сигналов периодического шума может быть получена, определение полученной заданной частоты любого одного или нескольких типов сигналов периодического шума как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора; и
определение, согласно спектру частот сигнала бурового раствора, центральной частоты сигнала периодического шума в сигнале бурового раствора как характерной частоты сигнала периодического шума в сигнале бурового раствора, если какой либо тип сигнала периодического шума не может быть получен.
В иллюстративном варианте осуществления сигнал бурового раствора представляет собой:  где
где  представляет собой сигнал бурового раствора, Sin представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
представляет собой сигнал бурового раствора, Sin представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
перед выполнением преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области процессор дополнительно выполняет следующую операцию:
ввод сигнала бурового раствора в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где длина буфера сигналов бурового раствора представляет собой N, N=K+M, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора. В иллюстративном варианте осуществления сигнал хода насоса представляет собой:
где длина буфера сигналов бурового раствора представляет собой N, N=K+M, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора. В иллюстративном варианте осуществления сигнал хода насоса представляет собой: 
где  представляет собой вектор входного сигнала хода насоса,
представляет собой вектор входного сигнала хода насоса,  представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
В иллюстративном варианте осуществления ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, включает: ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, для получения сигнала хода насоса  в буфере сигналов хода насоса:
в буфере сигналов хода насоса:
 где
где  представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,
представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,  представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
В иллюстративном варианте осуществления определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
расчет средней частоты хода насоса сигнала хода насоса в буфере сигналов хода насоса согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса; и
определение полученной средней частоты хода насоса сигнала хода насоса как характерной частоты сигнала периодического шума в сигнале бурового раствора; при этом формула расчета средней частоты хода насоса включает:
 представляет собой среднюю частоту хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой
представляет собой среднюю частоту хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой 
 представляет собой момент времени, соответствующий переднему фронту, a L+1 представляет собой количество передних фронтов.
представляет собой момент времени, соответствующий переднему фронту, a L+1 представляет собой количество передних фронтов.
В иллюстративном варианте осуществления выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области включает:
оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора для получения подвергнутого оконному преобразованию сигнала бурового раствора; и
выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора для получения сигнала бурового раствора в частотной области.
В иллюстративном варианте осуществления получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом, включает:
определение частоты коэффициента подавления согласно характерной частоте сигнала периодического шума в сигнале бурового раствора; и
умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом коэффициент подавления включает:
αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет  а
а  представляет собой характерную частоту;
представляет собой характерную частоту;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,
представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,  представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде;
представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде;  указывает на округление в меньшую сторону; при этом количество точек выборки N в периоде временной области и количество точек выборки S в периоде частотной области одинаково.
указывает на округление в меньшую сторону; при этом количество точек выборки N в периоде временной области и количество точек выборки S в периоде частотной области одинаково.
Машиночитаемый носитель данных хранит выполняемые компьютером команды, при этом при выполнении процессором выполняемые компьютером команды реализуют способ устранения шума для системы MWD.
Другие аспекты станут очевидны при прочтении и понимании графических материалов и подробного описания.
Краткое описание графических материалов
Сопроводительные графические материалы используются для обеспечения дополнительного понимания технических решений настоящего изобретения и составляют часть описания. Они используются совместно с вариантами осуществления настоящего изобретения для разъяснения технических решений настоящего изобретения и не накладывают ограничение в отношении технических решений настоящего изобретения.
На фиг. 1 представлено схематическое изображение общей конструкции системы MWD буровой жидкости в рамках одной технологии.
На фиг. 2 представлена блок схема обработки сигнала на приемном конце на поверхности в рамках одной технологии.
На фиг. 3 представлена блок-схема способа устранения шума для системы измерения во время бурения (MWD) согласно варианту осуществления настоящего изобретения.
На фиг. 4 представлено схематическое изображение устройства для устранения шума для системы измерения во время бурения (MWD) согласно варианту осуществления настоящего изобретения.
На фиг. 5 представлена блок-схема устранения периодического шума для неулавливаемого периодического сигнала в рамках одной технологии.
На фиг. 6 представлен процесс устранения периодического шума для улавливаемого периодического сигнала в рамках одной технологии.
На фиг. 7 представлена блок-схема способа устранения шума для системы измерения во время бурения (MWD) согласно иллюстративному варианту осуществления настоящего изобретения.
На фиг. 8а представлено схематическое изображение спектра мощности сигнала, принимаемого на поверхности, согласно иллюстративному варианту осуществления настоящего изобретения.
На фиг. 8b представлено схематическое изображение спектра мощности сигнала после устранения помех хода насоса согласно иллюстративному варианту осуществления настоящего изобретения.
Подробное описание
Далее в данном документе варианты осуществления настоящей заявки будут подробно описаны со ссылкой на сопроводительные графические материалы. Варианты осуществления в настоящем изобретении и признаки в вариантах осуществления могут быть объединены друг с другом случайным образом, если не противоречат друг другу.
Этапы, показанные на блок-схемах графических материалов, могут быть выполнены в компьютерной системе, например, в виде набора выполняемых компьютером команд. Кроме того, несмотря на то, что на блок схемах показаны логические порядки, в некоторых случаях показанные или описанные этапы могут быть выполнены в порядке, отличном от описанного в данном документе.
Измерение во время бурения (MWD) является технологией, которая может измерять и получать данные каротажа возле бурового долота во время бурения бурового долота и передавать полученные данные каротажа системе на поверхности в реальном времени. Данные каротажа обычно содержат характерную информацию пласта и различные технологические параметры бурения. Как технология передачи информации, используемая при измерении во время бурения, основной принцип работы режима передачи для сигнала давления буровой жидкости состоит в преобразовании информации, измеренной в скважине, в информацию управления и применении информации управления к скважинному генератору сигнала давления буровой жидкости для изменения давления буровой жидкости в канале передачи, тем самым генерируя импульсы давления буровой жидкости, которые передают на поверхность через буровую жидкость в канале передачи и обрабатывают системой обработки на поверхности и преобразовывают в необходимую информацию измерения скважинных параметров. Общая структура системы MWD буровой жидкости показана на фиг. 1. Система MWD буровой жидкости содержит бак для бурового раствора, насос для бурового раствора, приемный блок на поверхности и передающий конец в скважине. Бак для бурового раствора сообщается с насосом для бурового раствора, а насос для бурового раствора сообщается с приемным блоком на поверхности.
Насос для бурового раствора обеспечивает циркуляцию буровой жидкости и передающий конец в скважине отправляет данные на поверхность в форме импульсов давления буровой жидкости. Изменение давления буровой жидкости преобразуется в электрический сигнал посредством датчика давления на поверхности и электрический сигнал отправляется в приемный блок на поверхности, причем приемный блок на поверхности выполнен с возможностью декодирования данных, отправленных передающим концом в скважине.
Граф обработки сигнала, обычно используемый приемным концом на поверхности, показан на фиг. 2. Варианты осуществления настоящего изобретения относятся к техническому решению для устранения шумовых помех, которое осуществляют на этапе предварительной обработки так, что демодуляция и декодирование данных после графа обработки могут точно обработать данные, отправленные в скважину.
Характеристики передачи сигнала буровой жидкости главным образом включают скорость передачи сигнала, затухание сигнала, отражение сигнала и т.д. Однако для системы передачи давления буровой жидкости, во время передачи сигнала импульса давления в бурильной колонне с забоя к устью скважины, так как буровая жидкость принадлежит к трехфазному потоку газа, жидкости и твердого вещества, который содержит твердофазные вещества, такие как глина, каменный мусор, баритовая пыль, и газофазные вещества, такие как газ в свободном состоянии, интенсивность сигнала импульса давления буровой жидкости, генерируемого импульсным генератором, будет непрерывно затухать и на степень затухания влияет частота и расстояние передачи сигнала, и она также связана с внутренними параметрами, такими как внутренний диаметр канала буровой жидкости, а также типами, компонентами, вязкостью и объемной долей газа буровой жидкости. Одним словом, канал буровой жидкости является каналом с очень сложными характеристиками передачи. С учетом агрессивной среды канала буровой жидкости, в этом режиме передачи информации, вследствие влияния условий измерения на объекте, выходной сигнал датчика давления, который установлен на водоотделяющей колонне и выполнен с возможностью обнаружения колебания давления бурового раствора, не только содержит действующий сигнал для сигнала бурового раствора из скважины, но также содержит высокоамплитудный шум периодических колебаний давления, вызванный сжатием бурового раствора насосом для бурового раствора, и шум колебания давления, вызванный другими различными механическими действиями и случайным шумом. Помехи проявляются как периодические импульсы, связанные с характеристиками хода насоса, а шум проявляется как широкополосный белый шум, который имеет гораздо большую амплитуду, чем амплитуда действующего сигнала. Действующий сигнал для сигнала бурового раствора у устья скважины полностью погружен в различные шумы.
Согласно фактическому измерению и анализу, статистическое распределение сигнала шума буровой жидкости во временной области является нормальным распределением и содержит выраженные периодические компоненты. Периодические компоненты включают шум насоса для бурового раствора, шум вращения двигателя, шум верхнего привода, шум вращения роторного стола и т.д.
На фиг. 3 представлена блок-схема способа устранения шума для системы измерения во время бурения (MWD) согласно варианту осуществления настоящего изобретения, включающего этапы 301-303
Этап 301: прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора;
этап 302: выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и
этап 303: получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом.
При помощи технического решения согласно варианту осуществления настоящего изобретения реализовано устранение периодического шума системы измерения во время бурения (MWD) в частотной области. В этом варианте осуществления система измерения во время бурения (MWD) может быть использована для измерения нескольких геологических параметров в скважине в реальном времени во время бурения, включая параметры траектории буровой скважины для измерения во время бурения, такие как угол наклона скважины, азимут, угол торца бурильного инструмента и вспомогательные параметры, такие как температура.
В различных помехах и шумах системы передачи данных буровой жидкости во время бурения импульсный сигнал, генерируемый насосом для бурового раствора, имеет стойкую амплитуду, и когда частотные компоненты импульсного сигнала, генерируемого насосом для бурового раствора, перекрывают сигнал бурового раствора, отправленный в скважину, они помешают действующему сигналу для сигнала бурового раствора.
Периодический шум в сигнале бурового раствора может включать шум насоса для бурового раствора, шум вращения двигателя, шум верхнего привода, шум вращения роторного стола и т.д.
В иллюстративном варианте осуществления этап приема полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает: прием полученного сигнала бурового раствора; ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса; и определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления сигнал бурового раствора представляет собой:  где
где  представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора,  представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
В иллюстративном варианте осуществления сигнал бурового раствора вводят в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
В иллюстративном варианте осуществления сигнал хода насоса представляет собой:
 где
где  представляет собой вектор входного сигнала хода насоса,
представляет собой вектор входного сигнала хода насоса,  представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
В иллюстративном варианте осуществления этап ввода сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, включает: ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, для получения сигнала хода насоса  в буфере сигналов хода насоса:
в буфере сигналов хода насоса:
 где
где  представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,
представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,  представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов.
представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов.
В иллюстративном варианте осуществления этап определения средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
расчет средней частоты хода насоса сигнала хода насоса в буфере сигналов хода насоса согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса; и
определение полученной средней частоты хода насоса сигнала хода насоса как характерной частоты сигнала периодического шума в сигнале бурового раствора;
при этом формула расчета средней частоты хода насоса включает:
 обозначает среднюю частоту хода насоса сигнала хода насоса; сигнал хода насоса в буфере сигналов хода насоса представляет собой L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой
обозначает среднюю частоту хода насоса сигнала хода насоса; сигнал хода насоса в буфере сигналов хода насоса представляет собой L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой 
 представляет собой момент времени, соответствующий переднему фронту, a L+1 представляет собой количество передних фронтов.
представляет собой момент времени, соответствующий переднему фронту, a L+1 представляет собой количество передних фронтов.
В иллюстративном варианте осуществления этап приема полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает: прием полученного сигнала бурового раствора; если сигнал хода насоса не может быть получен, но заданная частота любого одного или нескольких типов сигналов периодического шума может быть получена, определение полученной заданной частоты любого одного или нескольких типов сигналов периодического шума как характерной частоты сигнала периодического шума в сигнале бурового раствора. В этом варианте осуществления сигнал периодического шума может содержать шум верхнего привода и характерная частота сигнала шума верхнего привода может быть входной частотой для верхнего привода, полученной посредством устройства в виде верхнего привода, которая является частотой верхнего привода, то есть характерной частотой сигнала шума верхнего привода, при этом сигнал периодического шума включает, без ограничения, шум верхнего привода и он может содержать любой тип периодического шума, заданная частота которого может быть получена.
В иллюстративном варианте осуществления этап приема полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает: прием полученного сигнала бурового раствора; определение, согласно спектру частот сигнала бурового раствора, центральной частоты сигнала периодического шума в сигнале бурового раствора как характерной частоты сигнала периодического шума в сигнале бурового раствора, если какой либо тип сигнала периодического шума не может быть получен. Этот вариант осуществления предназначен для случая, когда частота периодического шума не может быть получена.
На этапе 302 обработку преобразованием Фурье выполняют в отношении принятого сигнала бурового раствора для получения сигнала бурового раствора в частотной области.
В иллюстративном варианте осуществления сигнал бурового раствора представляет собой:  где
где  представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора,  представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
Перед выполнением преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области способ дополнительно включает:
ввод сигнала бурового раствора в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов.
где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов.
В иллюстративном варианте осуществления этап выполнения преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области включает: оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора для получения подвергнутого оконному преобразованию сигнала бурового раствора; и выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора для получения сигнала бурового раствора в частотной области. В этом варианте осуществления сигнал бурового раствора  в буфере сигналов бурового раствора умножают на заданную оконную функцию для расчета подвергнутого оконному преобразованию сигнала бурового раствора
в буфере сигналов бурового раствора умножают на заданную оконную функцию для расчета подвергнутого оконному преобразованию сигнала бурового раствора  Формула расчета оконного преобразования выглядит следующим образом:
Формула расчета оконного преобразования выглядит следующим образом:
где  представляет собой подвергнутый оконному преобразованию сигнал бурового раствора,
представляет собой подвергнутый оконному преобразованию сигнал бурового раствора,  представляет собой заданную оконную функцию,
представляет собой заданную оконную функцию,  представляет собой длину оконной функции, а
представляет собой длину оконной функции, а  в формуле указывает на то, что два вектора соответственно умножают поэлементно.
в формуле указывает на то, что два вектора соответственно умножают поэлементно.
Заданная оконная функция может быть окном Хеннинга, или могут быть выбраны другие оконные функции. Вектор оконной функции окна Хеннинга представляет собой:

где N представляет собой длину оконной функции, а n представляет собой номер последовательности точек выборки в оконной функции.
В этом варианте осуществления оконная функция оконного преобразования может быть окном Хеннинга, или могут быть выбраны другие оконные функции, что конкретно не ограничено, и разные оконные функции могут быть выбраны согласно соответствующей информации данных бурения, подлежащих обработке.
В этом варианте осуществления выходной сигнал бурового раствора в частотной области с устраненным шумом получают согласно средней частоте хода насоса, сигналу бурового раствора в частотной области и заданному коэффициенту подавления. Значение коэффициента подавления может быть представлено в виде фиксированного значения, или оно может быть выбрано согласно интенсивности помех хода насоса и ожидаемого эффекта подавления. Чем меньше значение коэффициента подавления, тем более очевидно подавление компонента помех хода насоса при соответствующей частоте.
В иллюстративном варианте осуществления этап получения выходного сигнала бурового раствора в частотной области с устраненным шумом согласно средней частоте хода насоса, сигналу бурового раствора в частотной области и заданному коэффициенту подавления включает:
умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом коэффициент подавления включает:
где αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой количество точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет  а
а  представляет собой характерную частоту;
представляет собой характерную частоту;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,
представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,  представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде;
представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде;  указывает на округление в меньшую сторону. В этом варианте осуществления процесс реализации определения коэффициента подавления может проходить следующим образом: сигнал бурового раствора
указывает на округление в меньшую сторону. В этом варианте осуществления процесс реализации определения коэффициента подавления может проходить следующим образом: сигнал бурового раствора  подвергают обработке преобразованием Фурье для получения сигнала бурового раствора Sw в частотной области, при этом формула преобразования Фурье выглядит следующим образом:
подвергают обработке преобразованием Фурье для получения сигнала бурового раствора Sw в частотной области, при этом формула преобразования Фурье выглядит следующим образом:  в формуле преобразования Фурье представляет собой операцию дискретного преобразования Фурье (DFT).
в формуле преобразования Фурье представляет собой операцию дискретного преобразования Фурье (DFT).  может быть сигналом бурового раствора в частотной области и может также быть подвергнутым оконному преобразованию сигналом бурового раствора в частотной области. В частотной области компонент помех хода насоса в полосе пропускания действующего сигнала, включенный в сигнал бурового раствора
может быть сигналом бурового раствора в частотной области и может также быть подвергнутым оконному преобразованию сигналом бурового раствора в частотной области. В частотной области компонент помех хода насоса в полосе пропускания действующего сигнала, включенный в сигнал бурового раствора  в частотной области, подавляют, то есть компонент сигнала с частотой
в частотной области, подавляют, то есть компонент сигнала с частотой  подавляют, к представляет собой целое число и удовлетворяет
подавляют, к представляет собой целое число и удовлетворяет  где
где  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области, а действующий сигнал для сигнала бурового раствора с этой частотой представляет собой сигнал, генерируемый генератором импульсов в скважине и передаваемый в систему приема на поверхности для обработки демодуляцией, при этом
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области, а действующий сигнал для сигнала бурового раствора с этой частотой представляет собой сигнал, генерируемый генератором импульсов в скважине и передаваемый в систему приема на поверхности для обработки демодуляцией, при этом  определяют посредством режима модуляции действующего сигнала и частоты, то есть после определения режима модуляции и частоты, используемых генератором импульсов в скважине, получают центральную частоту
определяют посредством режима модуляции действующего сигнала и частоты, то есть после определения режима модуляции и частоты, используемых генератором импульсов в скважине, получают центральную частоту  действующего сигнала для сигнала бурового раствора в частотной области;
действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области. Разрешение по частоте дискретного преобразования Фурье DFT представляет собой:
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области. Разрешение по частоте дискретного преобразования Фурье DFT представляет собой:
где  представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде.
представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде.
В этом варианте осуществления согласно периоду выборки сигнала бурового раствора и количеству точек выборки в периоде вектор подавления определен следующим образом:
 где S представляет собой длину вектора подавления, а значение S такое же, как у N.
где S представляет собой длину вектора подавления, а значение S такое же, как у N.
После определения вектора коэффициента подавления выполняют обработку для устранения шума в отношении сигнала бурового раствора в частотной области, и формула расчета для обработки для устранения шума следующая:
 где
где  представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой вектор коэффициента подавления; и
представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой вектор коэффициента подавления; и  представляет собой сигнал бурового раствора в частотной области с устраненным шумом.
представляет собой сигнал бурового раствора в частотной области с устраненным шумом.
В иллюстративном варианте осуществления сигнал бурового раствора  в частотной области с устраненным шумом преобразовывают в сигнал бурового раствора во временной области с шумом, устраненным посредством обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора
в частотной области с устраненным шумом преобразовывают в сигнал бурового раствора во временной области с шумом, устраненным посредством обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора  во временной области с устраненным шумом:
во временной области с устраненным шумом:
если  то K точек выборки в центре сигнала бурового раствора во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
то K точек выборки в центре сигнала бурового раствора во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
 где K представляет собой количество перехваченных точек выборки, а N представляет собой количество точек выборки в периоде.
где K представляет собой количество перехваченных точек выборки, а N представляет собой количество точек выборки в периоде.
Настоящее изобретение предусматривает способ устранения шума для системы измерения во время бурения (MWD), включающий следующие этапы: прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора; выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом.
Как показано на фиг. 4, вариант осуществления настоящего изобретения дополнительно предусматривает устройство для устранения шума для системы измерения во время бурения (MWD), содержащее запоминающее устройство и процессор;
при этом запоминающее устройство выполнено с возможностью хранения программы для устранения шума для системы MWD; и
процессор выполнен с возможностью чтения и выполнения программы для устранения шума для системы MWD, а также выполнения следующих операций:
прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора;
выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и
получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом.
В иллюстративном варианте осуществления этап приема полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора;
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса; и
определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления этап приема полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора; и
если сигнал хода насоса не может быть получен, но заданная частота любого одного или нескольких типов сигналов периодического шума может быть получена, определение полученной заданной частоты любого одного или нескольких типов сигналов периодического шума как характерной частоты сигнала периодического шума в сигнале бурового раствора.
В иллюстративном варианте осуществления этап приема полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора;
определение, согласно спектру частот сигнала бурового раствора, центральной частоты сигнала периодического шума в сигнале бурового раствора как характерной частоты сигнала периодического шума в сигнале бурового раствора, если какой-либо тип сигнала периодического шума не может быть получен.
В иллюстративном варианте осуществления сигнал бурового раствора представляет собой:  где
где  представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора,  представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
перед выполнением процессором преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области процессор дополнительно выполняет следующие операции:
ввод сигнала бурового раствора в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора. В иллюстративном варианте осуществления сигнал хода насоса представляет собой:
где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора. В иллюстративном варианте осуществления сигнал хода насоса представляет собой: 
где  представляет собой вектор входного сигнала хода насоса,
представляет собой вектор входного сигнала хода насоса,  представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
В иллюстративном варианте осуществления ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, включает: ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, для получения сигнала хода насоса  в буфере сигналов хода насоса:
в буфере сигналов хода насоса:

где  представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
В иллюстративном варианте осуществления этап определения средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
расчет средней частоты хода насоса сигнала хода насоса в буфере сигналов хода насоса согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса; и
определение полученной средней частоты хода насоса сигнала хода насоса как характерной частоты сигнала периодического шума в сигнале бурового раствора;
при этом формула расчета средней частоты хода насоса включает:
 представляет собой среднюю частоту хода насоса сигнала хода насоса; сигнал хода насоса в буфере сигналов хода насоса представляет собой L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой
представляет собой среднюю частоту хода насоса сигнала хода насоса; сигнал хода насоса в буфере сигналов хода насоса представляет собой L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой  представляет собой момент времени, соответствующий переднему фронту,
представляет собой момент времени, соответствующий переднему фронту,  a L+1 указывает на количество передних фронтов.
a L+1 указывает на количество передних фронтов.
В иллюстративном варианте осуществления этап выполнения преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области включает:
оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора для получения подвергнутого оконному преобразованию сигнала бурового раствора; и выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора для получения сигнала бурового раствора в частотной области.
В иллюстративном варианте осуществления этап получения, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом, включает:
определение частоты коэффициента подавления согласно характерной частоте сигнала периодического шума в сигнале бурового раствора; и
умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом коэффициент подавления включает:
αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в периоде; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет  а
а  представляет собой характерную частоту;
представляет собой характерную частоту;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,
представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,  представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде;
представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде;  указывает на округление в меньшую сторону. В этом варианте осуществления процесс реализации определения коэффициента подавления может проходить следующим образом: сигнал бурового раствора
указывает на округление в меньшую сторону. В этом варианте осуществления процесс реализации определения коэффициента подавления может проходить следующим образом: сигнал бурового раствора  подвергают обработке преобразованием Фурье для получения сигнала бурового раствора
подвергают обработке преобразованием Фурье для получения сигнала бурового раствора  в частотной области, при этом формула преобразования Фурье выглядит следующим образом:
в частотной области, при этом формула преобразования Фурье выглядит следующим образом:  в формуле преобразования Фурье представляет собой операцию дискретного преобразования Фурье (DFT).
в формуле преобразования Фурье представляет собой операцию дискретного преобразования Фурье (DFT).  может быть сигналом бурового раствора в частотной области и может также быть подвергнутым оконному преобразованию сигналом бурового раствора в частотной области. В частотной области компонент помех хода насоса в полосе пропускания действующего сигнала, включенный в сигнал бурового раствора
может быть сигналом бурового раствора в частотной области и может также быть подвергнутым оконному преобразованию сигналом бурового раствора в частотной области. В частотной области компонент помех хода насоса в полосе пропускания действующего сигнала, включенный в сигнал бурового раствора  в частотной области, подавляют, то есть компонент сигнала с частотой
в частотной области, подавляют, то есть компонент сигнала с частотой  подавляют, к представляет собой целое число и удовлетворяет
подавляют, к представляет собой целое число и удовлетворяет 
 представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области, а действующий сигнал для сигнала бурового раствора с этой частотой представляет собой сигнал, генерируемый генератором импульсов в скважине и передаваемый в систему приема на поверхности для обработки демодуляцией, при этом
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области, а действующий сигнал для сигнала бурового раствора с этой частотой представляет собой сигнал, генерируемый генератором импульсов в скважине и передаваемый в систему приема на поверхности для обработки демодуляцией, при этом определяют посредством режима модуляции действующего сигнала и частоты, то есть после определения режима модуляции и частоты, используемых генератором импульсов в скважине, получают центральную частоту
определяют посредством режима модуляции действующего сигнала и частоты, то есть после определения режима модуляции и частоты, используемых генератором импульсов в скважине, получают центральную частоту  действующего сигнала для сигнала бурового раствора в частотной области;
действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области. Разрешение по частоте дискретного преобразования Фурье (DFT) представляет собой:
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области. Разрешение по частоте дискретного преобразования Фурье (DFT) представляет собой:
где  представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде.
представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде.
В этом варианте осуществления согласно периоду выборки сигнала бурового раствора и количеству точек выборки в периоде вектор подавления определен следующим образом:
 где S представляет собой длину вектора подавления, а значение S соответствует количеству точек выборки N в периоде.
где S представляет собой длину вектора подавления, а значение S соответствует количеству точек выборки N в периоде.
После определения вектора коэффициента подавления выполняют обработку для устранения шума в отношении сигнала бурового раствора в частотной области, и формула расчета обработки для устранения шума следующая:
 где
где  представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой вектор коэффициента подавления; и
представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой вектор коэффициента подавления; и  представляет собой сигнал бурового раствора в частотной области с устраненным шумом.
представляет собой сигнал бурового раствора в частотной области с устраненным шумом.
В иллюстративном варианте осуществления сигнал бурового раствора  в частотной области с устраненным шумом преобразовывают в сигнал бурового раствора во временной области с шумом, устраненным посредством обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора
в частотной области с устраненным шумом преобразовывают в сигнал бурового раствора во временной области с шумом, устраненным посредством обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора  во временной области с устраненным шумом:
во временной области с устраненным шумом:

если  то K точек выборки в центре сигнала бурового раствора во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
то K точек выборки в центре сигнала бурового раствора во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
 K представляет собой количество перехваченных точек выборки, а N представляет собой количество точек выборки в периоде.
K представляет собой количество перехваченных точек выборки, а N представляет собой количество точек выборки в периоде.
Иллюстративный вариант осуществления
В различных помехах и шумах системы измерения во время бурения сигнал импульса, генерируемый насосом для бурового раствора, имеет стойкую амплитуду, и когда его частотный компонент перекрывает сигнал бурового раствора, отправленный в скважину, он создаст стойкие помехи для действующего сигнала для сигнала бурового раствора, которые трудно устранить. В некоторых технологиях процесс устранения периодического шума для неулавливаемого периодического сигнала показан на фиг. 5, и процесс устранения периодического шума для улавливаемого периодического сигнала показан на фиг.6. Способ устранения периодического шума насоса в этом иллюстративном варианте осуществления показан на фиг.7 и процесс реализации способа включает этапы 701-709
Этап 701: прием полученного сигнала бурового раствора и получение входного сигнала хода насоса.
На этом этапе амплитуда помех хода насоса для бурового раствора стойкая, но сигнал помех хода насоса имеет периодические характеристики. Полученный сигнал бурового раствора может быть выражен как  а входной сигнал хода насоса может быть выражен как
а входной сигнал хода насоса может быть выражен как  полученный сигнал бурового раствора представляет собой:
полученный сигнал бурового раствора представляет собой:  входной сигнал хода насоса представляет собой:
входной сигнал хода насоса представляет собой:

где представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора, представляет собой вектор входного сигнала бурового раствора,
представляет собой вектор входного сигнала бурового раствора, представляет собой сигнал хода насоса,
представляет собой сигнал хода насоса, представляет собой вектор входного сигнала хода насоса, а К представляет собой длину входного сигнала бурового раствора и вектор сигнала бурового раствора.
представляет собой вектор входного сигнала хода насоса, а К представляет собой длину входного сигнала бурового раствора и вектор сигнала бурового раствора.
Этап 702: ввод сигнала бурового раствора и сигнала хода насоса в буфер сигналов бурового раствора и буфер сигналов хода насоса соответственно.
На этом этапе сигнал бурового раствора вводят в буфер сигналов бурового раствора для получения сигнала бурового раствора в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где
где представляет собой сигнал бурового раствора в буфере сигналов бурового раствора, длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
представляет собой сигнал бурового раствора в буфере сигналов бурового раствора, длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
Сигнал хода насоса вводят в буфер сигналов хода насоса для получения сигнала хода насоса в буфере сигналов хода насоса:

где  представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,
представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса,  представляет собой входной сигнал хода насоса, N=K+M, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
представляет собой входной сигнал хода насоса, N=K+M, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
Этап 703: получение средней частоты хода насоса согласно сигналу хода насоса в буфере сигналов хода насоса.
На этом этапе среднюю частоту хода насоса сигнала хода насоса в буфере сигналов хода насоса рассчитывают согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса;
при этом формула расчета средней частоты хода насоса включает:
сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий передним фронтам, представляет собой 
где  представляет собой среднюю частоту хода насоса, а
представляет собой среднюю частоту хода насоса, а  представляет собой момент времени, соответствующий переднему фронту.
представляет собой момент времени, соответствующий переднему фронту.
Этап 704: оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора.
На этом этапе сигнал бурового раствора в буфере сигналов бурового раствора подвергнут оконному преобразованию, и формула для оконного преобразования выглядит следующим образом:
где  представляет собой подвергнутый оконному преобразованию сигнал бурового раствора,
представляет собой подвергнутый оконному преобразованию сигнал бурового раствора,  представляет собой оконную функцию окна Хеннинга с длиной N;
представляет собой оконную функцию окна Хеннинга с длиной N;
вектор оконной функции окна Хеннинга представляет собой

где  в формуле
в формуле  означает, что два вектора соответственно умножают поэлементно.
означает, что два вектора соответственно умножают поэлементно.
Этап 705: выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора в буфере сигналов бурового раствора для получения сигнала бурового раствора в частотной области.
На этом этапе подвергнутый оконному преобразованию сигнал бурового раствора  в буфере сигналов бурового раствора подвергают преобразованию DFT для получения сигнала бурового раствора
в буфере сигналов бурового раствора подвергают преобразованию DFT для получения сигнала бурового раствора  в частотной области,
в частотной области,
 где
где  представляет операцию дискретного преобразования Фурье DFT.
представляет операцию дискретного преобразования Фурье DFT.
Этап 706: задание коэффициента подавления и определение вектора подавления, коэффициент подавления включает:
где αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет  а
а  представляет собой среднюю частоту хода насоса;
представляет собой среднюю частоту хода насоса;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области; представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора:
представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора:  представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде;
представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде;  указывает на округление в меньшую сторону. Согласно заданному коэффициенту подавления вектор подавления определен следующим образом:
указывает на округление в меньшую сторону. Согласно заданному коэффициенту подавления вектор подавления определен следующим образом:
 , где S представляет собой длину вектора подавления, а значение длины вектора подавления является таким же, что и количество точек выборки в периоде, т.е. N.
, где S представляет собой длину вектора подавления, а значение длины вектора подавления является таким же, что и количество точек выборки в периоде, т.е. N.
Этап 707: умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом.
На этом этапе после определения коэффициента подавления выполняют обработку для устранения шума в отношении сигнала бурового раствора в частотной области, и формула расчета обработки для устранения шума следующая:
 где
где  представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой коэффициент подавления, а
представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой коэффициент подавления, а  представляет собой сигнал бурового раствора в частотной области с устраненным шумом.
представляет собой сигнал бурового раствора в частотной области с устраненным шумом.
Этап 708 (не показан): преобразование сигнала бурового раствора  в частотной области с устраненным шумом во временную область с использованием обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора
в частотной области с устраненным шумом во временную область с использованием обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора  во временной области с устраненным шумом.
во временной области с устраненным шумом.

Этап 709 (не показан): получение сигнала выходного бурового раствора с устраненным шумом согласно сигналу бурового раствора во временной области с устраненным шумом.
На этом этапе,  K выборок в центре сигнала бурового раствора
K выборок в центре сигнала бурового раствора  во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:

K представляет собой количество перехваченных точек выборки, N представляет собой количество точек выборки в периоде, a  представляет собой вектор сигнала выходного бурового раствора с устраненными помехами хода насоса. С графом обработки для устранения шума согласно этому варианту осуществления сравнительная демонстрация эффекта устранения шума в отношении сигнала бурового раствора в частотной области показана на фиг. 8а и фиг. 8b. Действующий сигнал в виде сигнала бурового раствора в примере является модулированным сигналом 2FSK на 4 бит/с, двумя несущими частотами являются 4 Гц и 8 Гц соответственно, и диапазон частот сигнала составляет 2 Гц~10 Гц. На спектре мощности сигнала, полученного на поверхности, на фиг. 8а можно видеть, что сигнал бурового раствора, полученный на поверхности, содержит большое количество компонентов помех хода насоса. На спектре мощности сигнала с устраненными помехами хода насоса на фиг. 8b можно видеть, что компоненты помех хода насоса в сигнале бурового раствора с устраненным шумом были подавлены в диапазоне от 2 Гц до 10 Гц и остались только несущие компоненты 4 Гц и 8 Гц.
представляет собой вектор сигнала выходного бурового раствора с устраненными помехами хода насоса. С графом обработки для устранения шума согласно этому варианту осуществления сравнительная демонстрация эффекта устранения шума в отношении сигнала бурового раствора в частотной области показана на фиг. 8а и фиг. 8b. Действующий сигнал в виде сигнала бурового раствора в примере является модулированным сигналом 2FSK на 4 бит/с, двумя несущими частотами являются 4 Гц и 8 Гц соответственно, и диапазон частот сигнала составляет 2 Гц~10 Гц. На спектре мощности сигнала, полученного на поверхности, на фиг. 8а можно видеть, что сигнал бурового раствора, полученный на поверхности, содержит большое количество компонентов помех хода насоса. На спектре мощности сигнала с устраненными помехами хода насоса на фиг. 8b можно видеть, что компоненты помех хода насоса в сигнале бурового раствора с устраненным шумом были подавлены в диапазоне от 2 Гц до 10 Гц и остались только несущие компоненты 4 Гц и 8 Гц.
В этом варианте осуществления предлагается устранить шум насоса в частотной области и подавить периодические компоненты помех хода насоса в частотной области для системы MWD для получения способа устранения помех хода насоса в частотной области, что может эффективно устранить периодический шум и получить хороший эффект устранения шума.
Иллюстративный вариант осуществления
В этом иллюстративном варианте осуществления цель способа устранения шума для системы MWD заключается в предоставлении способа устранения шума, который может обеспечить частоту сигнала периодического шума. Процесс реализации способа включает этапы 801-809.
Этап 801: прием полученного сигнала бурового раствора.
На этом этапе полученный сигнал бурового раствора может быть обозначен как  а полученный сигнал бурового раствора представляет собой:
а полученный сигнал бурового раствора представляет собой:
 где
где  представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора,  представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
802: ввод сигнала бурового раствора в буфер сигналов бурового раствора.
На этом этапе сигнал бурового раствора вводят в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 где
где  представляет собой сигнал бурового раствора в буфере сигналов бурового раствора, длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
представляет собой сигнал бурового раствора в буфере сигналов бурового раствора, длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
Этап 803: определение характерной частоты сигнала периодического шума в сигнале бурового раствора.
На этом этапе определение характерной частоты сигнала периодического шума в сигнале бурового раствора может включать получение заданной частоты любого одного или нескольких типов сигнала периодического шума и определение полученной заданной частоты как характерной частоты сигнала периодического шума в сигнале бурового раствора. Например, если периодическим шумом является шум верхнего привода, то частота шума верхнего привода может быть получена непосредственно.
Получение частоты шума верхнего привода является распространенным техническим средством для специалистов в данной области техники, которое не ограничено.
Этап 804: оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора.
На этом этапе сигнал бурового раствора в буфере сигналов бурового раствора подвергнут оконному преобразованию, и формула для оконного преобразования выглядит следующим образом:
где  представляет собой подвергнутый оконному преобразованию сигнал бурового раствора,
представляет собой подвергнутый оконному преобразованию сигнал бурового раствора, 
 представляет собой оконную функцию окна Хеннинга с длиной N, вектор оконной функции окна Хеннинга представляет собой:
представляет собой оконную функцию окна Хеннинга с длиной N, вектор оконной функции окна Хеннинга представляет собой:
где  в формуле
в формуле  означает, что два вектора соответственно умножают поэлементно.
означает, что два вектора соответственно умножают поэлементно.
Этап 805: выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора в буфере сигналов бурового раствора для получения сигнала бурового раствора в частотной области.
На этом этапе подвергнутый оконному преобразованию сигнал бурового раствора  в буфере сигналов бурового раствора подвергают преобразованию DFT для получения сигнала бурового раствора
в буфере сигналов бурового раствора подвергают преобразованию DFT для получения сигнала бурового раствора  в частотной области,
в частотной области,  где
где  представляет операцию DFT.
представляет операцию DFT.
Этап 806: задание коэффициента подавления и определение вектора подавления, коэффициент подавления включает:
где αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой количество точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет а
а  представляет собой заданную частоту сигнала периодического шума;
представляет собой заданную частоту сигнала периодического шума;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой разрешение по частоте преобразования DFT сигнала бурового раствора,
представляет собой разрешение по частоте преобразования DFT сигнала бурового раствора,  представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде; и
представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде; и  указывает на округление в меньшую сторону.
указывает на округление в меньшую сторону.
Согласно заданному коэффициенту подавления вектор подавления определен следующим образом:
 где S представляет собой длину вектора подавления, а его значение соответствует количеству точек выборки в периоде.
где S представляет собой длину вектора подавления, а его значение соответствует количеству точек выборки в периоде.
Этап 807: умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом.
На этом этапе после определения коэффициента подавления выполняют обработку для устранения шума в отношении сигнала бурового раствора в частотной области, и формула расчета обработки для устранения шума следующая:
 где
где  представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой коэффициент подавления, а
представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой коэффициент подавления, а  представляет собой сигнал бурового раствора в частотной области с подавленным шумом.
представляет собой сигнал бурового раствора в частотной области с подавленным шумом.
Этап 808 (не показан): преобразование сигнала бурового раствора  в частотной области с подавленным шумом во временную область с использованием обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора
в частотной области с подавленным шумом во временную область с использованием обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора  во временной области с подавленным шумом.
во временной области с подавленным шумом.

Этап 809: получение сигнала выходного бурового раствора с подавленным шумом согласно сигналу бурового раствора во временной области с подавленным шумом.
На этом этапе, K точек выборки в центре сигнала бурового раствора
K точек выборки в центре сигнала бурового раствора  во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
 K представляет собой количество перехваченных точек выборки, N представляет собой количество точек выборки в периоде, а
K представляет собой количество перехваченных точек выборки, N представляет собой количество точек выборки в периоде, а  представляет собой вектор сигнала выходного бурового раствора с устраненными помехами хода насоса.
представляет собой вектор сигнала выходного бурового раствора с устраненными помехами хода насоса.
В этом варианте осуществления предлагается устранить шум в частотной области и подавить периодические компоненты в частотной области для системы MWD для достижения цели устранения помех периодического шума, причем может быть достигнут хороший эффект устранения шума.
Иллюстративный вариант осуществления
В этом иллюстративном варианте осуществления процесс реализации способа устранения шума для системы измерения во время бурения (MWD) включает этапы 901-909,
Этап 901: прием полученного сигнала бурового раствора.
На этом этапе полученный сигнал бурового раствора может представлять собой  а полученный сигнал бурового раствора представляет собой:
а полученный сигнал бурового раствора представляет собой:
 где
где  представляет собой сигнал бурового раствора,
представляет собой сигнал бурового раствора,  представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала.
902: ввод сигнала бурового раствора в буфер сигналов бурового раствора.
На этом этапе сигнал бурового раствора вводят в буфер сигналов бурового раствора для получения сигнала бурового раствора  в буфере сигналов бурового раствора:
в буфере сигналов бурового раствора:
 все длины буферов сигнала бурового раствора представляют собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
все длины буферов сигнала бурового раствора представляют собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
Этап 903: определение характерной частоты сигнала периодического шума в сигнале бурового раствора.
На этом этапе центральную частоту сигнала периодического шума в сигнале бурового раствора определяют как характерную частоту сигнала периодического шума в сигнале бурового раствора.
Для случая, когда частота шума не может быть определена и сигнал шума не может быть получен, центральная частота сигнала периодического шума в сигнале бурового раствора может быть использована для определения как характерная частота сигнала периодического шума в сигнале бурового раствора.
Этап 904: оконное преобразование сигнала бурового раствора в буфере сигналов бурового раствора.
На этом этапе сигнал бурового раствора в буфере сигналов бурового раствора подвергнут оконному преобразованию, и формула для оконного преобразования выглядит следующим образом:
где 
 представляет собой оконную функцию окна Хеннинга с длиной N, вектор оконной функции окна Хеннинга представляет собой:
представляет собой оконную функцию окна Хеннинга с длиной N, вектор оконной функции окна Хеннинга представляет собой:

где  в формуле
в формуле  означает, что два вектора соответственно умножают поэлементно.
означает, что два вектора соответственно умножают поэлементно.
Этап 905: выполнение преобразования Фурье в отношении подвергнутого оконному преобразованию сигнала бурового раствора в буфере сигналов бурового раствора для получения сигнала бурового раствора в частотной области.
На этом этапе подвергнутый оконному преобразованию сигнал бурового раствора  в буфере сигналов бурового раствора подвергают преобразованию DFT для получения сигнала бурового раствора
в буфере сигналов бурового раствора подвергают преобразованию DFT для получения сигнала бурового раствора  в частотной области,
в частотной области,  где
где  представляет операцию DFT.
представляет операцию DFT.
Этап 906: задание коэффициента подавления и определение вектора подавления, коэффициент подавления включает:
где αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  k представляет собой целое число и удовлетворяет
k представляет собой целое число и удовлетворяет  а
а представляет собой характерную частоту;
представляет собой характерную частоту;  представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой центральную частоту действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;
представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области;  представляет собой разрешение по частоте преобразования DFT сигнала бурового раствора,
представляет собой разрешение по частоте преобразования DFT сигнала бурового раствора, 
 представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде; и
представляет собой период выборки сигнала бурового раствора, N представляет собой количество точек выборки в периоде; и  указывает на округление в меньшую сторону.
указывает на округление в меньшую сторону.
Согласно заданному коэффициенту подавления вектор подавления определен следующим образом:
 где N представляет собой длину вектора подавления.
где N представляет собой длину вектора подавления.
Этап 907: умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом.
На этом этапе после определения коэффициента подавления выполняют обработку для устранения шума в отношении сигнала бурового раствора в частотной области, и формула расчета обработки для устранения шума следующая:
 где
где  представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой коэффициент подавления, а
представляет собой сигнал бурового раствора в частотной области или подвергнутый оконному преобразованию сигнал бурового раствора в частотной области, а представляет собой коэффициент подавления, а  представляет собой сигнал бурового раствора в частотной области с подавленным шумом.
представляет собой сигнал бурового раствора в частотной области с подавленным шумом.
Этап 908 (не показан): преобразование сигнала бурового раствора  в частотной области с подавленным шумом во временную область с использованием обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора
в частотной области с подавленным шумом во временную область с использованием обратного дискретного преобразования Фурье (IDFT) для получения сигнала бурового раствора  во временной области с подавленным шумом.
во временной области с подавленным шумом.

Этап 909: получение сигнала выходного бурового раствора с подавленным шумом согласно сигналу бурового раствора во временной области с подавленным шумом.
На этом этапе,  K точек выборки в центре сигнала бурового раствора
K точек выборки в центре сигнала бурового раствора  во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
во временной области с устраненным шумом перехватывают для получения вектора сигнала выходного бурового раствора с устраненными помехами хода насоса:
 где K представляет собой количество перехваченных точек выборки, N представляет собой количество точек выборки в периоде, а
где K представляет собой количество перехваченных точек выборки, N представляет собой количество точек выборки в периоде, а  представляет собой вектор сигнала выходного бурового раствора с устраненными помехами хода насоса.
представляет собой вектор сигнала выходного бурового раствора с устраненными помехами хода насоса.
В этом варианте осуществления предлагается устранить шум в частотной области и подавить периодические компоненты в частотной области для системы MWD для достижения цели устранения помех шума, причем может быть достигнут хороший эффект устранения шума.
Специалистам в данной области техники будет понятно, что все или некоторые этапы способов, функциональных модулей/блоков в системах и устройствах, раскрытых выше, могут быть реализованы в виде программного обеспечения, аппаратно программного обеспечения, аппаратного обеспечения и их соответствующих комбинаций. В аппаратной реализации разделение между функциональными модулями/блоками, упомянутое в приведенном выше описании, не обязательно соответствует разделению физических компонентов. Например, физический компонент может иметь несколько функций, или одна функция или этап могут быть выполнены несколькими физическими компонентами совместно. Некоторые или все компоненты могут быть реализованы как программное обеспечение, выполняемое процессором, таким как процессор цифровой обработки сигналов или микропроцессор, или как аппаратное обеспечение, или как интегральная схема, например, интегральная схема специализированного применения. Такое программное обеспечение может распространяться на машиночитаемых носителях, которые могут включать компьютерные носители данных (или постоянные носители) и средства связи (или временные носители). Как хорошо известно специалистам в данной области техники, термин «компьютерные носители данных» включает энергозависимые, энергонезависимые, съемные и несъемные носители, реализованные любым способом или по любой технологии, для хранения информации, такой как машиночитаемые команды, структуры данных, программные модули или другие данные. Компьютерные носители данных включают, но без ограничения, RAM, ROM, EEPROM, флеш-память или другие технологии запоминающих устройств, CD ROM, универсальные цифровые диски (DVD) или другой накопитель на оптических дисках, магнитные кассеты, ленты, накопитель на магнитных дисках или другие магнитные запоминающие устройства или любые другие носители, которые можно использовать для хранения нужной информации и доступ к которым можно получить через компьютер. Кроме того, специалистам в данной области техники хорошо известно, что средства связи обычно содержат машиночитаемые команды, структуры данных, программные модули или другие данные в виде модулированных сигналов данных, таких как несущие волны или другие механизмы передачи, и могут включать любые средства доставки информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ спектрального анализа полигармонических сигналов | 2015 |
|
RU2611102C1 |
| УСТРОЙСТВА И СПОСОБЫ ДЛЯ ФИЛЬТРАЦИИ ПОМЕХ, ОБУСЛОВЛЕННЫХ РАБОТОЙ БУРОВОГО НАСОСА, ПРИ ГИДРОИМПУЛЬСНОЙ ТЕЛЕМЕТРИИ | 2014 |
|
RU2668099C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА МАТЕРИАЛА В МАССОВОМ РАСХОДОМЕРЕ КОРИОЛИСА | 1996 |
|
RU2155325C2 |
| СПОСОБ И УСТРОЙСТВО УЛУЧШЕНИЯ РЕЧЕВОГО СИГНАЛА С ИСПОЛЬЗОВАНИЕМ БЫСТРОЙ СВЕРТКИ ФУРЬЕ | 2022 |
|
RU2795573C1 |
| СПОСОБ РАЗДЕЛЕНИЯ ДЖИТТЕРА СИГНАЛА ДАННЫХ | 2008 |
|
RU2380826C1 |
| СПОСОБ ОБРАБОТКИ ВЕКТОРНЫХ СИГНАЛОВ ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ НА ОСНОВЕ ВЕЙВЛЕТ-АНАЛИЗА | 2017 |
|
RU2690001C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СЖАТИЯ СЕЙСМИЧЕСКОГО СИГНАЛА В СКВАЖИНЕ | 2012 |
|
RU2570699C2 |
| Способ компенсации влияния фазового шума на передачу данных в радиоканале | 2016 |
|
RU2626246C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ПОДАВЛЕНИЯ ШУМА | 2016 |
|
RU2685391C1 |
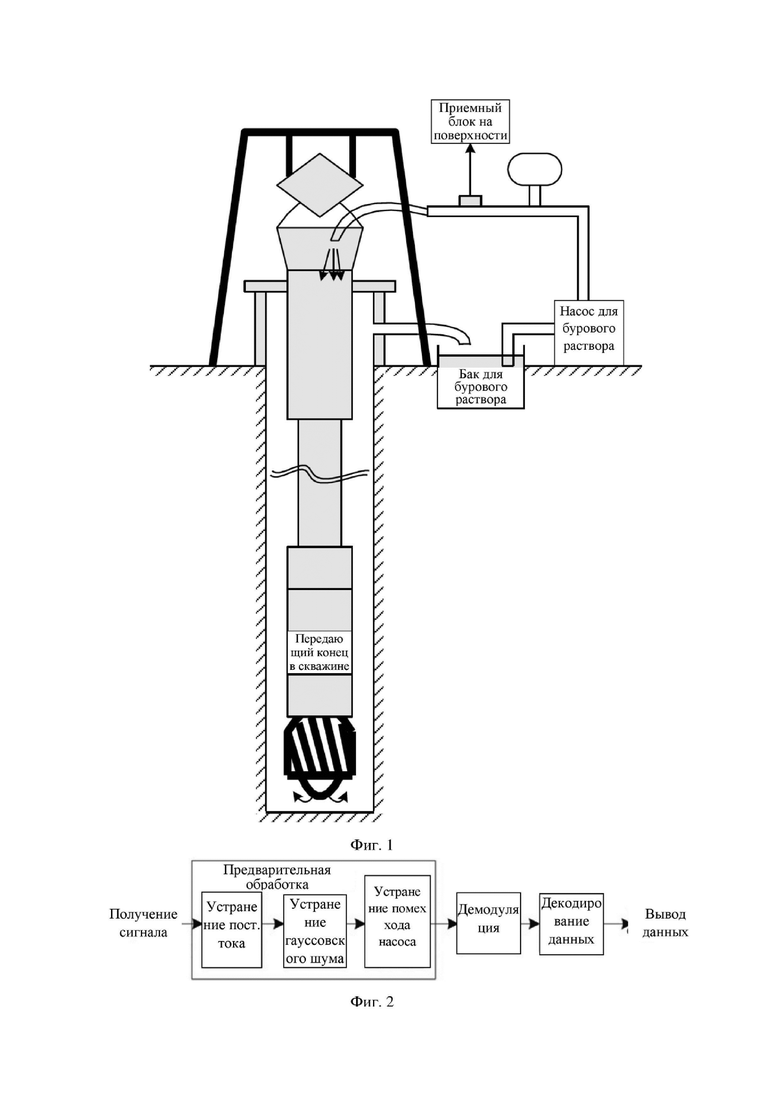
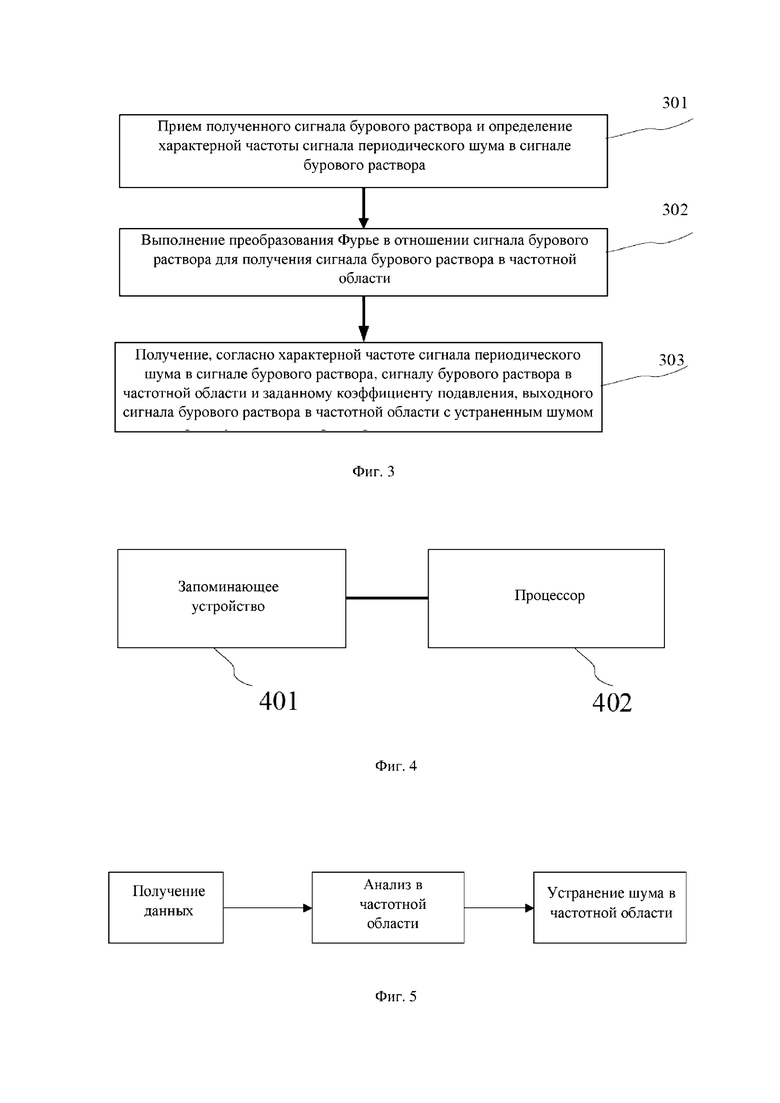
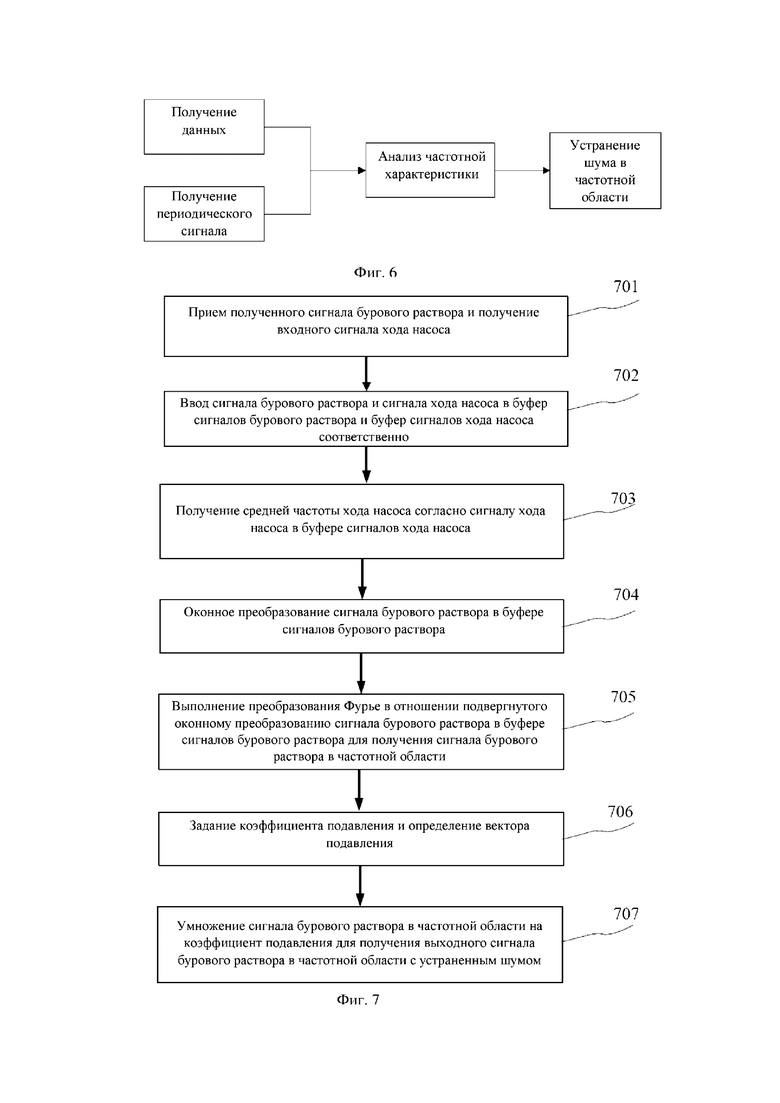
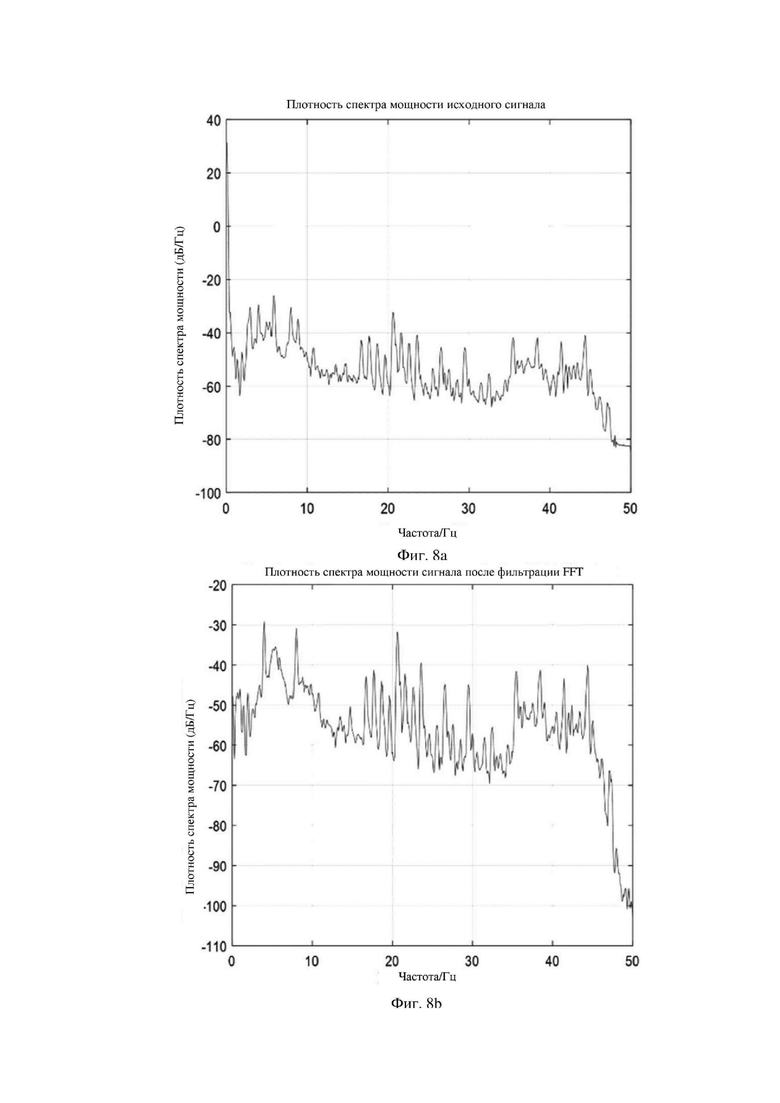
Настоящее изобретение относится без ограничения к области каротажа, в частности к способу устранения шума и устройству для устранения шума для системы измерения во время бурения (MWD), и носителю данных. Предложен способ устранения шума для системы измерения во время бурения (MWD), включающий: прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале (301) бурового раствора; выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области (302); и получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом (303). Технический результат – повышение эффективности устранения шума при периодических шумовых помехах и как результат - повышение информативности сигналов бурового раствора. 3 н. и 10 з.п. ф-лы, 8 ил.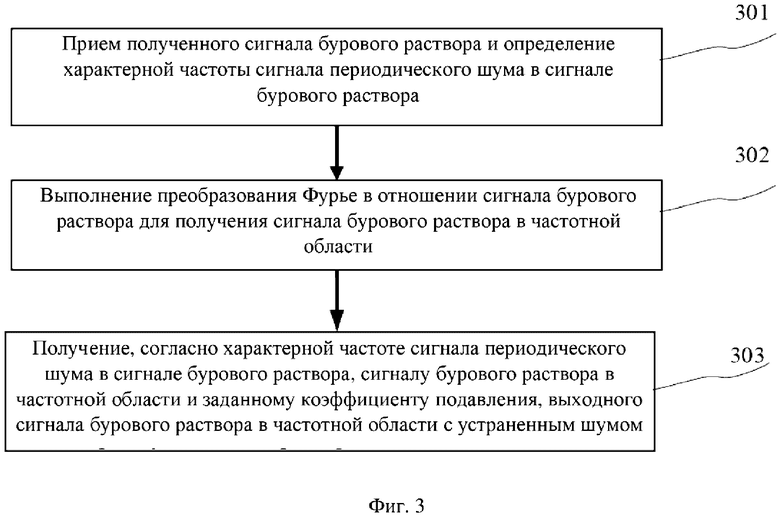
1. Способ устранения шума для системы измерения во время бурения (MWD), включающий:
прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора;
выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и
получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора;
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса; и
определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора.
2. Способ устранения шума для системы MWD по п. 1, отличающийся тем, что сигнал бурового раствора представляет собой:
s n=[sin(n) sin(n+1) … sin(n+K-1)]T,
где sin(n) представляет собой сигнал бурового раствора, sin представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
перед выполнением преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области способ дополнительно включает:
ввод сигнала бурового раствора в буфер сигналов бурового раствора для получения сигнала бурового раствора sb в буфере сигналов бурового раствора:
s b=[sin(n-M) … sin(n-2) sin(n-1) sin]T,
где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
3. Способ устранения шума для системы MWD по п. 1, отличающийся тем, что сигнал хода насоса представляет собой:
P in=[pin(n) pin(n+1) … pin(n+K-1)]T,
где Pin представляет собой вектор входного сигнала хода насоса, pin(n) представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
4. Способ устранения шума для системы MWD по п. 3, отличающийся тем, что ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, включает:
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, для получения сигнала хода насоса Pb в буфере сигналов хода насоса:
P b=[pin(n-M) … pin(n-2) pin(n-1) Pin]T,
где Pb представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
5. Способ устранения шума для системы MWD по п. 4, отличающийся тем, что определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
расчет средней частоты хода насоса сигнала хода насоса в буфере сигналов хода насоса согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса; и
определение полученной средней частоты хода насоса сигнала хода насоса как характерной частоты сигнала периодического шума в сигнале бурового раствора;
при этом формула расчета средней частоты хода насоса включает:
где  представляет собой среднюю частоту хода насоса сигнала хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой tk, tk представляет собой момент времени, соответствующий переднему фронту, k=0,1,2, …, L , а L+1 представляет собой количество передних фронтов.
представляет собой среднюю частоту хода насоса сигнала хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой tk, tk представляет собой момент времени, соответствующий переднему фронту, k=0,1,2, …, L , а L+1 представляет собой количество передних фронтов.
6. Способ устранения шума для системы MWD по п. 1, отличающийся тем, что получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом включает:
определение частоты коэффициента подавления согласно характерной частоте сигнала периодического шума в сигнале бурового раствора; и
умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом коэффициент подавления включает:
где αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  , к представляет собой целое число и удовлетворяет
, к представляет собой целое число и удовлетворяет  , а
, а  представляет собой характерную частоту; ƒ0 представляет собой центральную частоту действующего сигнала для сигнала бурового раствора; Bs представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области; Δƒ представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,
представляет собой характерную частоту; ƒ0 представляет собой центральную частоту действующего сигнала для сигнала бурового раствора; Bs представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области; Δƒ представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,  Ts представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде; и
Ts представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде; и  указывает на округление в меньшую сторону.
указывает на округление в меньшую сторону.
7. Устройство для устранения шума для системы MWD, содержащее запоминающее устройство и процессор;
при этом запоминающее устройство выполнено с возможностью хранения программы для устранения шума для системы MWD; и
процессор выполнен с возможностью чтения и выполнения программы для устранения шума для системы MWD, а также выполнения следующих операций:
прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора;
выполнение преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области; и
получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом прием полученного сигнала бурового раствора и определение характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
прием полученного сигнала бурового раствора;
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса; и
определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора.
8. Устройство для устранения шума для системы MWD по п. 7, отличающееся тем, что сигнал бурового раствора представляет собой:
s in=[sin(n) sin(n+1) … sin(n+K-1)]T,
где sin(n) представляет собой сигнал бурового раствора, sin представляет собой вектор входного сигнала бурового раствора, K представляет собой длину вектора входного сигнала, а n представляет собой начальный номер последовательности входного сигнала;
перед выполнением преобразования Фурье в отношении сигнала бурового раствора для получения сигнала бурового раствора в частотной области процессор дополнительно выполняет следующую операцию:
ввод сигнала бурового раствора в буфер сигналов бурового раствора для получения сигнала бурового раствора sb в буфере сигналов бурового раствора:
s b=[sin(n-M) … sin(n-2) sin(n-1) sin]T,
где длина буфера сигналов бурового раствора представляет собой N, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов бурового раствора.
9. Устройство для устранения шума для системы MWD по п. 7, отличающееся тем, что сигнал хода насоса представляет собой:
P in=[pin(n) pin(n+1) … pin(n+K-1)]Т,
где Pin представляет собой вектор входного сигнала хода насоса, pin(n) представляет собой входной сигнал хода насоса, K представляет собой длину вектора входного сигнала хода насоса, а n представляет собой начальный номер последовательности входного сигнала хода насоса.
10. Устройство для устранения шума для системы MWD по п. 9, отличающееся тем, что ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, включает:
ввод сигнала хода насоса в буфер сигналов хода насоса, когда может быть получен входной сигнал хода насоса, для получения сигнала хода насоса pb в буфере сигналов хода насоса:
P b=[pin(n-M) … pin(n-2) pin(n-1) Pin]T,
где Pb представляет собой сигнал хода насоса в буфере сигналов хода насоса, N представляет собой длину буфера сигналов хода насоса, pin(n) представляет собой входной сигнал хода насоса, N=K+М, а M представляет собой длину вектора исходного сигнала в буфере сигналов хода насоса.
11. Устройство для устранения шума для системы MWD по п. 10, отличающееся тем, что определение средней частоты хода насоса, полученной согласно сигналу хода насоса в буфере сигналов хода насоса, как характерной частоты сигнала периодического шума в сигнале бурового раствора включает:
расчет средней частоты хода насоса сигнала хода насоса в буфере сигналов хода насоса согласно моменту времени, соответствующему переднему фронту сигнала хода насоса в буфере сигналов хода насоса, и формуле расчета средней частоты хода насоса; и
определение полученной средней частоты хода насоса сигнала хода насоса как характерной частоты сигнала периодического шума в сигнале бурового раствора;
при этом формула расчета средней частоты хода насоса включает:
где  представляет собой среднюю частоту хода насоса сигнала хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой tk, tk представляет собой момент времени, соответствующий переднему фронту, k=0,1,2, …, L, а L+1 представляет собой количество передних фронтов.
представляет собой среднюю частоту хода насоса сигнала хода насоса, сигнал хода насоса в буфере сигналов хода насоса представляет собой сигнал, содержащий L+1 передних фронтов, а момент времени, соответствующий переднему фронту, представляет собой tk, tk представляет собой момент времени, соответствующий переднему фронту, k=0,1,2, …, L, а L+1 представляет собой количество передних фронтов.
12. Устройство для устранения шума для системы MWD по п. 7, отличающееся тем, что получение, согласно характерной частоте сигнала периодического шума в сигнале бурового раствора, сигналу бурового раствора в частотной области и заданному коэффициенту подавления, выходного сигнала бурового раствора в частотной области с устраненным шумом включает:
определение частоты коэффициента подавления согласно характерной частоте сигнала периодического шума в сигнале бурового раствора; и
умножение сигнала бурового раствора в частотной области на коэффициент подавления для получения выходного сигнала бурового раствора в частотной области с устраненным шумом;
при этом коэффициент подавления включает:
где αj представляет собой коэффициент подавления, значение αj представляет собой положительное действительное число меньше 1, j представляет собой номер последовательности точек выборки в периоде, a S представляет собой количество точек выборки в частотной области после преобразования Фурье; коэффициент подавления подавляет компонент сигнала с частотой  , k представляет собой целое число и удовлетворяет
, k представляет собой целое число и удовлетворяет  а
а  представляет собой характерную частоту; ƒ0 представляет собой центральную частоту действующего сигнала для сигнала бурового раствора; Bs представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области; Δƒ представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,
представляет собой характерную частоту; ƒ0 представляет собой центральную частоту действующего сигнала для сигнала бурового раствора; Bs представляет собой полосу пропускания действующего сигнала для сигнала бурового раствора в частотной области; Δƒ представляет собой разрешение по частоте преобразования Фурье сигнала бурового раствора,  Ts представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде; и
Ts представляет собой период выборки сигнала бурового раствора, а N представляет собой количество точек выборки в периоде; и  указывает на округление в меньшую сторону.
указывает на округление в меньшую сторону.
13. Машиночитаемый носитель данных, на котором хранятся выполняемые компьютером команды, которые при исполнении процессором реализуют этапы способа устранения шума для системы MWD по любому из пп. 1-6.
| CN 106089188 B 26.02.2019 | |||
| US 20070192031 A1 16.08.2007 | |||
| US 20180298749 A1 18.10.2018 | |||
| US 20100314169 A1 16.12.2010 | |||
| CN 105041304 B 26.09.2017 | |||
| US 5459697 A 17.10.1995. |

