ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в общем относится к области телеметрических систем и, в частности, но не только, к системам обработки сигналов для использования в отношении генераторов акустических сигналов при бурении скважин.
УРОВЕНЬ ТЕХНИКИ
[002] Скважины часто бурят для получения нефтяных флюидов из подземных резервуаров. Во многих случаях буровое долото соединено с бурильной колонной и приводится во вращение расположенной на поверхности буровой установкой. Буровой раствор циркулирует через бурильную колонну для охлаждения бурового долота, когда оно рассекает подземные горные породы и выносит буровые шламы из ствола скважины.
[003] По мере совершенствования технологий бурения получили развитие способы «измерения в процессе бурения» («measurement while drilling», MWD), которые позволяют бурильщику точно идентифицировать местоположение бурильной колонны и долота и условия в стволе скважины. Оборудование MWD часто включает в себя один или более датчиков, которые обнаруживают состояние окружающей среды или положение, и передает информацию обратно бурильщику на поверхности. Эта информация может быть передана на поверхность, используя акустические сигналы, которые переносят закодированные данные об измеренном состоянии.
[004] Системы для излучения акустических сигналов используют волновые генераторы, которые создают быстрые изменения давления бурового раствора. Быстрые изменения давления создают импульсы, которые переносятся через буровой раствор в приемники, расположенные на или возле поверхности. Генераторы импульсов давления предусматривают использование вращающихся «сирен бурового раствора» («mud sirens») и линейно действующих клапанов, которые прерывают поток бурового раствора через импульсный генератор. Временное прерывание потока может использоваться для создания паттерна импульсов давления, которые могут быть записаны, интерпретированы и расшифрованы на поверхности.
[005] Сигнал MWD обычно принимается одним или более преобразователями, расположенными на нагнетательной трубе на поверхности. Сигналы MWD включают в себя множество частот, и эти сигналы могут перекрываться с другими источниками шума в стволе скважины. Буровые насосы и другое буровое оборудование могут создавать шум, который нарушает процесс извлечения сигнала MWD. Кроме того, поскольку MWD проходит через ствол скважины и нагнетательную трубу, сигнал MWD может отражаться от труб и оборудования (такого как буровой насос). В зависимости от силы сигнала, частоты и местоположения записывающих приемников, отраженный сигнал частично или полностью гасит первичный сигнал MWD. Следовательно, существует потребность в улучшенном способе и системе для записи сигналов MWD, которые устраняют недостатки предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[006] В различных вариантах осуществления настоящее изобретение включает в себя буровую систему, которая содержит датчик, кодер, функционально соединенный с датчиком, и генератор импульсов давления, функционально соединенный с кодером. Генератор импульсов давления выполнен с возможностью создавать первичный сигнал в ответ на входной сигнал из кодера. Буровая система дополнительно содержит первичный преобразователь, опорный преобразователь и сигнальный процессор, соединенный с первичным преобразователем и опорным преобразователем. Сигнальный процессор содержит двухступенчатый фильтр, который выполнен с возможностью извлекать первичный сигнал из шума, регистрируемого в первичном преобразователе
[007] В другом варианте осуществления настоящее изобретение включает в себя приемную систему для использования при приеме и декодировании первичного импульсного сигнала давления, генерируемого инструментом измерения в процессе бурения (MWD). Инструмент MWD может быть использован в буровой системе, которая содержит буровой насос, являющийся источником шума импульсного сигнала давления. Приемная система содержит первичный преобразователь, опорный преобразователь и сигнальный процессор. Первичный преобразователь создает электрический сигнал в ответ на результат измерения первичного импульсного сигнала давления и шума импульсного сигнала давления. Опорный преобразователь создает электрический сигнал в ответ на результат измерения в первую очередь шума импульсного сигнала давления.
[008] Сигнальный процессор содержит адаптивный фильтр и фильтр нижних частот. Адаптивный фильтр создает первый отфильтрованный электрический сигнал из электрических сигналов, создаваемых первичным преобразователем и опорным преобразователем. Фильтр нижних частот создает второй отфильтрованный электрический сигнал из первого отфильтрованного электрического сигнала. Второй отфильтрованный электрический сигнал представляет восстановленный первичный сигнал.
[009] В другом аспекте настоящее изобретение включает в себя способ обработки первичного импульсного сигнала давления, генерируемого инструментом измерения в процессе бурения (MWD), который используется в буровой системе. Способ начинается с этапов создания опорного электрического сигнала в ответ на результат измерения в первую очередь шума импульсного сигнала давления и создания первичного электрического сигнала в ответ на результат измерения первичного импульсного сигнала давления и шума импульсного сигнала давления. Способ продолжается этапом применения адаптивного фильтра к опорному электрическому сигналу и первичному электрическому сигналу для создания первого отфильтрованного электрического сигнала. Далее способ включает в себя этап применения фильтра нижних частот к первому отфильтрованному электрическому сигналу для создания второго отфильтрованного электрического сигнала. Способ продолжается этапом декодирования первичного электрического сигнала из второго отфильтрованного электрического сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[010] Фиг. 1 представляет вертикальный вид буровой системы в соответствии с вариантом осуществления настоящего изобретения.
[011] Фиг. 2 представляет схематическое изображение сигнального процессора MWD по настоящему изобретению.
[012] Фиг. 3 представляет блок-схему, отображающую способ обработки сигнала MWD.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
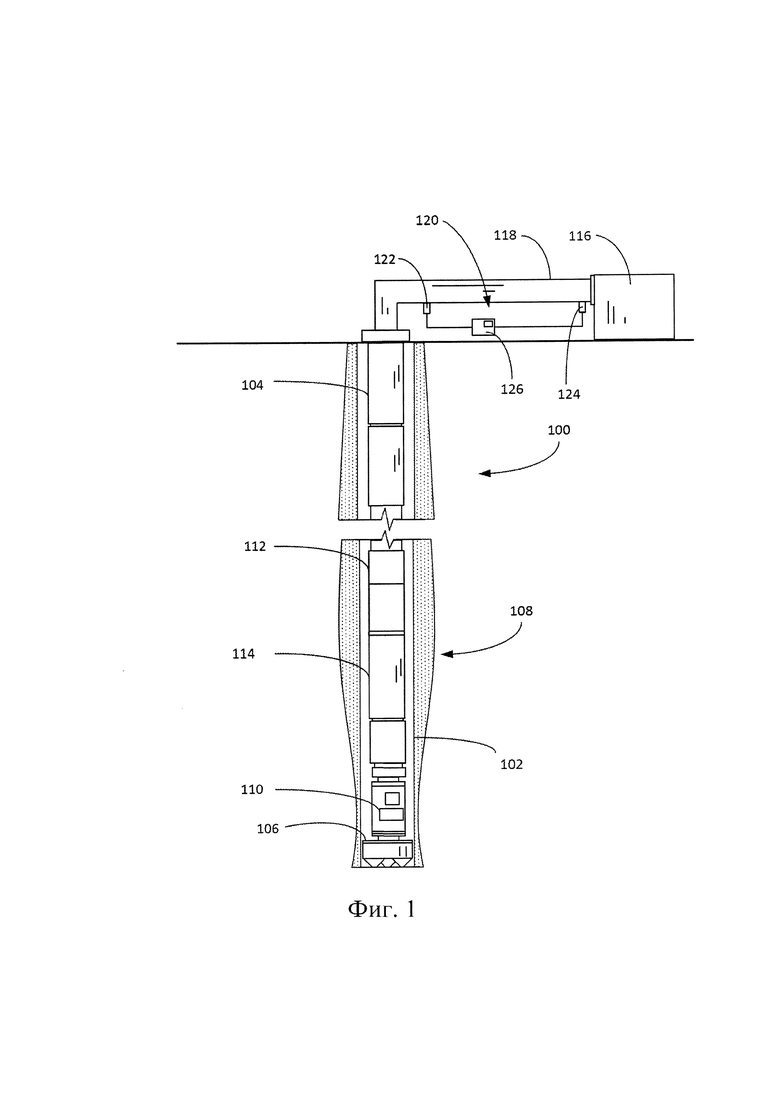
[013] В соответствии с вариантом осуществления настоящего изобретения фиг. 1 представляет буровую систему 100 в стволе 102 скважины. Буровая система 100 содержит бурильную колонну 104, буровое долото 106 и инструмент 108 MWD (измерение в процессе бурения). Следует понимать, что буровая система 100 будет содержать дополнительные компоненты, в том числе буровые установки, буровые насосы и другие наземные средства и скважинное оборудование. Хотя варианты осуществления настоящего изобретения раскрыты в отношении инструмента 108 измерения в процессе бурения (MWD), следует понимать, что настоящее изобретение также найдет применение в способах каротажа в процессе бурения (logging-while-drilling) (LWD). Соответственно, ссылки на MWD следует понимать как широкую ссылку на любые применения или способы, которые предполагают использование телеметрических импульсных сигналов давления из ствола 102 скважины.
[014] Инструмент 108 MWD содержит один или более датчиков 110, модуль 112 кодера и генератор 114 импульсов давления. Следует понимать, что инструмент 108 MWD может содержать дополнительные компоненты, например центраторы. Датчики 110 выполнены с возможностью измерять состояние в буровой системе 100 или стволе 102 скважины и создавать репрезентативный сигнал для измерения. Такие измерения могут включать в себя, например, температуру, давление, вибрацию, крутящий момент, наклон, магнитное направление и положение. Сигналы от датчиков ПО кодируются модулем 112 кодера в командные сигналы, поступающие в генератор 114 импульсов давления.
[015] Буровой раствор под давлением подается в буровую систему 100 с помощью бурового насоса 116 через нагнетательную трубу 118. Нагнетательная труба 118 и буровой насос 116 могут быть расположены на поверхности или ниже платформы буровой установки. На основе командных сигналов из модуля 112 кодера генератор 114 импульсов давления контролируемым образом регулирует расход бурового раствора или другого флюида через генератор 114 импульсов давления. Быстрое изменение размера пути потока через генератор 114 импульсов давления повышает и понижает давление бурового раствора, протекающего через инструмент 108 MWD. Изменение давления создает акустические импульсы, которые содержат кодированные сигналы отдатчиков 110.
[016] Исходный сигнал, генерируемый генератором 114 импульсов давления, именуется в настоящем документе «первичным» сигналом. Посторонний шум внутри ствола 102 скважины и нагнетательной трубы 118 именуется в настоящем документе «шумом». Шум включает в себя импульсы давления, генерируемые оборудованием, отличным от генератора 114 импульсов давления, создаваемые окружающей средой импульсы, и отражения от первичного сигнала. Первичные сигналы и шум передаются через буровой раствор, оборудование и трубы в стволе 102 скважины и нагнетательной трубе 118.
[017] Приемная система 120 записывает импульсы давления внутри нагнетательной трубы и изолирует первичный сигнал от шума. В примерах осуществления приемная система 120 содержит первичный преобразователь 122, опорный преобразователь 124 и сигнальный процессор 126. Опорный преобразователь 124 расположен в нагнетательной трубе 118 в относительно непосредственной близости от бурового насоса 116. В этом положении шум, создаваемый буровым насосом 116, доминирует над импульсами давления, записываемыми опорным преобразователем 124. В этом местоположении опорный преобразователь 124 выполнен, следовательно, с возможностью создавать электрический сигнал, который в значительной степени отражает шум, созданный буровым насосом 116, и шум, отраженный от бурового насоса 116.
[018] Первичный преобразователь 122 расположен внутри нагнетательной трубы на определенном расстоянии от бурового насоса 116 и опорного преобразователя 124. Первичный преобразователь 122 расположен внутри нагнетательной трубы в местоположении, которое минимизирует величину отраженных сигналов. Первичный преобразователь 122 выполнен с возможностью создавать электрический сигнал, который реагирует на измерение первичного сигнала и шума внутри нагнетательной трубы 108.
[019] Сигналы, создаваемые первичным преобразователем 122 и опорным преобразователем 124, поступают в сигнальный процессор 126. Хотя сигнальный процессор 126 изображен в виде автономного компонента, следует понимать, что сигнальный процессор 126 может быть встроен в компьютер или компьютерную сеть, используемую вместе с процессом бурения или каротажа. В общем сигнальный процессор 126 выполнен с возможностью извлекать и изолировать первичный сигнал от шума в нагнетательной трубе 118 и стволе 102 скважины в реальном времени с небольшой задержкой или без нее. Эффективная и быстрая изоляция первичного сигнала от шума расширяет ширину полосы частот телеметрии от инструмента 108 MWD на поверхность и обеспечивает передачу первичного сигнала с повышенной спектральной плотностью.
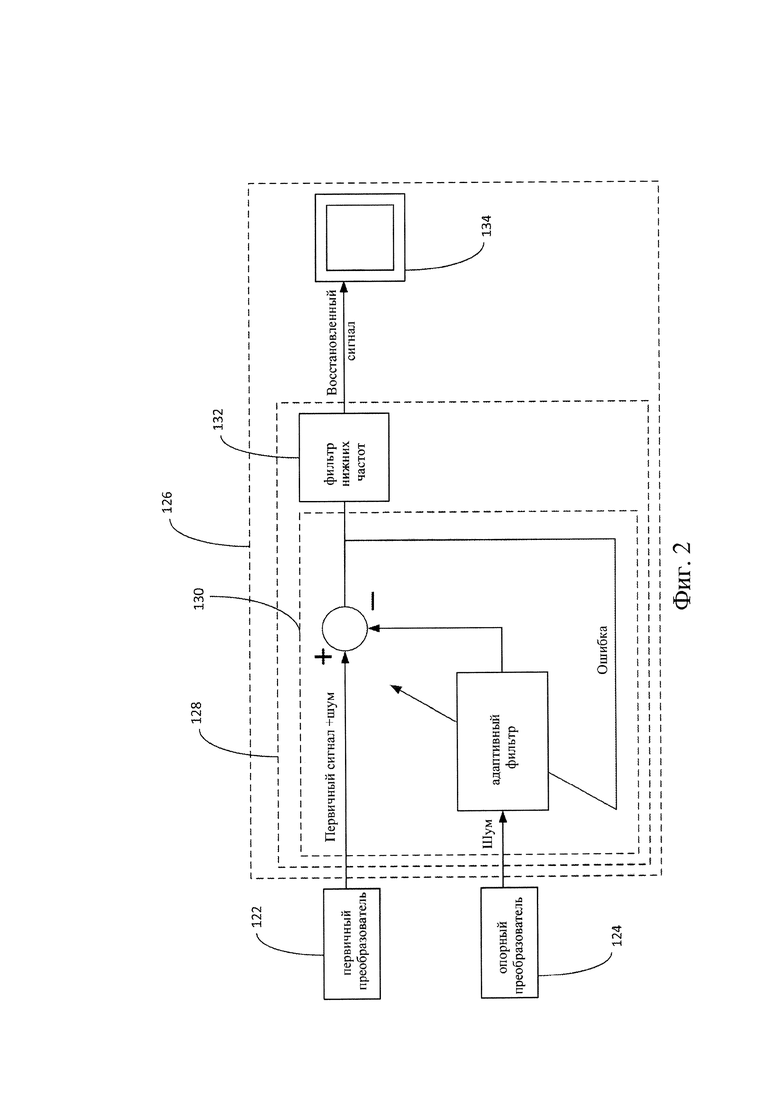
[020] На фиг. 2 показано схематическое изображение двухступенчатого фильтра 128, используемого для извлечения первичного сигнала из комбинации первичного сигнала и шума. Двухступенчатый фильтр 128 встроен в виде компьютерной программы, работающей в сигнальном процессоре 126. На первой ступени выходной сигнал из первичного преобразователя 122 и опорного преобразователя 124 вводятся в адаптивный фильтр 130. Адаптивный фильтр 130 создает первый отфильтрованный электрический сигнал. На второй ступени выходной сигнал из адаптивного фильтра 130 поступает в фильтр 132 нижних частот. Фильтр 132 нижних частот создает второй отфильтрованный электрический сигнал, который представляет восстановленный первичный сигнал. Восстановленный первичный сигнал подается фильтром 132 нижних частот на дисплей 134 или другое выходное устройство для отображения восстановленного сигнала оператору или для отправки восстановленного сигнала на автоматические управляющие устройства, связанные с процессом бурения.
[021] В примерах осуществления адаптивный фильтр 130 означает адаптивный фильтр минимальной среднеквадратичной ошибки (LMS - least means squares). Адаптивный фильтр имеет размер шага от приблизительно 0,0001 до приблизительно 0,00001 и длину фильтра от приблизительно 500 до приблизительно 10000. Эти значения выбраны для обеспечения быстрой и надежной сходимости адаптивного фильтра 130. В некоторых вариантах осуществления адаптивный фильтр 130 имеет размер шага около 0,00003 и длину фильтра 5000. Эти установки могут быть настроены оператором или автоматически сигнальным процессором 126 в ответ на результаты сходимости или расходимости. Адаптивный фильтр 130 использует опорный сигнал, предоставляемый первоначально опорным преобразователем 124, чтобы удалить шум из сигнала, предоставляемого первичным преобразователем 122.
[022] Сигнал, извлеченный адаптивным фильтром 130, подается на фильтр 132 нижних частот, где высокочастотный шум уменьшается. В примерах осуществления фильтр 132 нижних частот является фильтром с конечной импульсной характеристикой (FIR - finite impulse response), который выполнен с возможностью пропускать только низкочастотные сигналы, связанные с известными спектрами первичного сигнала, генерируемого инструментом 108 MWD. В других вариантах осуществления фильтр нижних частот является FIR-фильтром с окном Хемминга или FIR-фильтром с окном Кайзера. Выход фильтра 132 нижних частот представляет собой восстановленный сигнал, который может быть подан на модуль 134 декодера. Модуль 134 декодера выполнен с возможностью декодировать данные из восстановленного первичного сигнала. Следует понимать, что дисплеи, системы управления или другие периферийные устройства могут быть подсоединены к сигнальному процессору 126 для целей отображения, сохранения или использования обработанных сигналов.
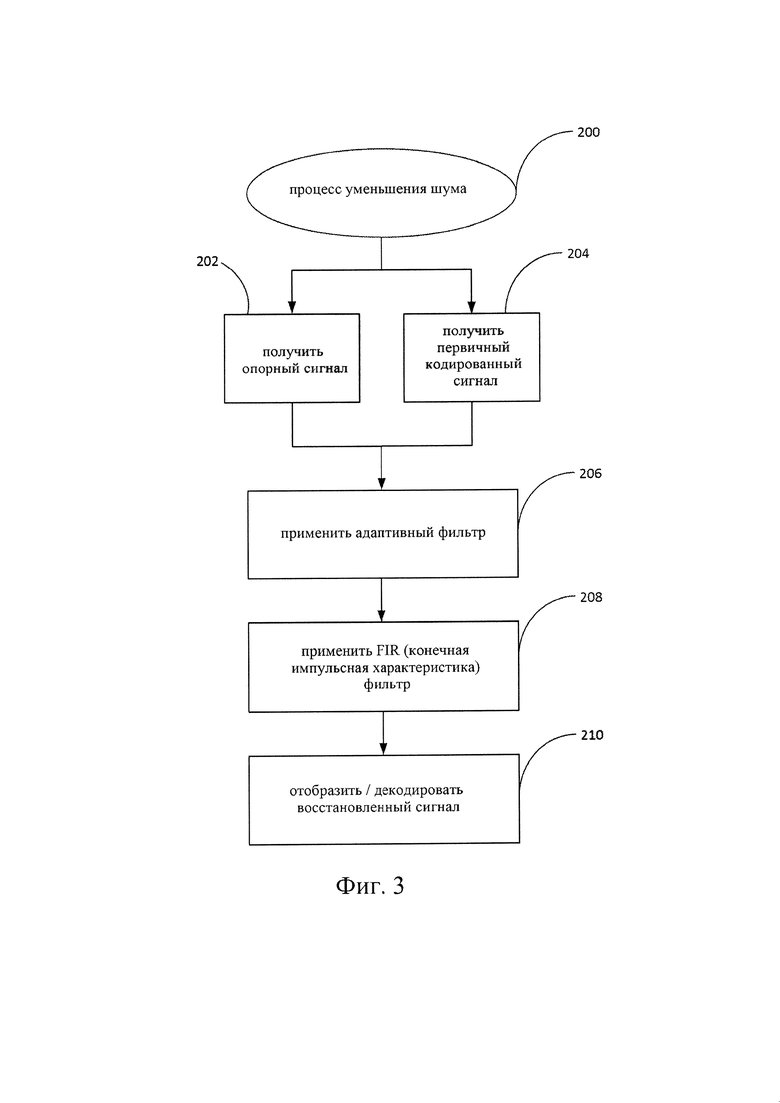
[023] На фиг. 3 показана схема технологического процесса для способа 200 уменьшения шума от сигнала, генерируемого инструментом 108 MWD. Процесс начинается с этапов 202 и 204, которые могут происходить одновременно или последовательно. На этапе 202 с помощью сигнального процессора 126 получают опорный электрический сигнал. В примерах осуществления этап получения опорного электрического сигнала включает в себя этапы позиционирования опорного преобразователя 124 в непосредственной близости от бурового насоса 116 и генерирования опорного электрического сигнала, который представляет импульсы давления, создаваемые буровым насосом 116 и отраженные от него.
[024] На этапе 204 с помощью сигнального процессора 126 получают первичный электрический сигнал. Этап 204 получения первичного электрического сигнала включает в себя позиционирование первичного преобразователя 122 на определенном расстоянии от опорного преобразователя 124 и генерирование первичного электрического сигнала, который представляет импульсы давления, измеряемые первичным преобразователем 122. Первичный преобразователь 122 расположен в местоположении внутри ствола 102 скважины или нагнетательной трубы 118, что минимизирует отношение шума к первичному сигналу, создаваемому инструментом 108 MWD.
[025] Процесс продолжается на этапе 206, во время которого адаптивный фильтр 130 применяют с помощью сигнального процессора 126 к выходу первичного преобразователя 122 и опорного преобразователя 124 для создания первого отфильтрованного электрического сигнала. Адаптивный фильтр 130 может быть адаптивным фильтром минимальной среднеквадратичной ошибки (LSM). Этап 206 применения адаптивного фильтра 130 может включать в себя применение адаптивного фильтра LSM с размером шага около 0,00003 для длины фильтра около 5000. Этап 206 применения адаптивного фильтра 130 в общем использует опорный сигнал в качестве основы для удаления шума, связанного с буровым насосом 115, из сигнала, создаваемого первичным преобразователем 122.
[026] Далее на этапе 208 выходной сигнал из адаптивного фильтра 130 направляют через фильтр 132 нижних частот для создания второго отфильтрованного электрического сигнала. Фильтр 132 нижних частот выполнен с возможностью удалять высокочастотные сигналы, которые не связаны с первичным сигналом, создаваемым инструментом 108 MWD. Фильтр 132 нижних частот может быть фильтром нижних частот с конечной импульсной характеристикой (FIR). Наконец, на этапе 210 второй отфильтрованный электрический сигнал направляют из двухступенчатого фильтра 128 на последующую обработку, где извлеченный первичный сигнал декодируют, отображают и используют в качестве основы для просмотра измерений, создаваемых инструментом 108 MWD.
[027] Таким образом, в примерах осуществления настоящее изобретение предлагает систему и способ извлечения первичного кодированного сигнала, создаваемого инструментом 108 MWD, из шума, присутствующего в стволе 102 скважины и нагнетательной трубе 118. Использование двухступенчатого фильтра 128 в сочетании с рационально расположенными первичным преобразователем 122 и опорным преобразователем 124 представляет существенное преимущество по сравнению с системами обработки сигналов предшествующего уровня техники. Следует понимать, что, хотя многочисленные характеристики и преимущества разных вариантов осуществления настоящего изобретения были представлены в предшествующем описании вместе с деталями структуры и функциями различных вариантов осуществления изобретения, это раскрытие является всего лишь иллюстративным, и изменения могут быть произведены в деталях, в первую очередь в том, что касается структуры и расположения частей в рамках принципов настоящего изобретения, в полной мере указанных с помощью широкого общего значения терминов, которыми изложена прилагаемая формула изобретения. Специалистам в данной области техники будет понятно, что идеи настоящего изобретения могут быть применены к другим системам в пределах объема и сущности настоящего изобретения.
Настоящее изобретение относится к области телеметрических систем и, в частности, к системам обработки сигналов для использования в отношении генераторов акустических сигналов при бурении скважин. Техническим результатом является снижение шума в передаваемом первичном сигнале MWD. В частности, предложена буровая система, содержащая буровой насос, а также содержащая: датчик, кодер, функционально соединенный с датчиком; генератор импульсов давления, функционально соединенный с кодером, причем генератор импульсов давления выполнен с возможностью создавать первичный сигнал в ответ на входной сигнал из кодера; первичный преобразователь для формирования сигнала первичного преобразователя в ответ на результат измерения первичного сигнала; опорный преобразователь для формирования сигнала опорного преобразователя в ответ на отражение первичного сигнала от бурового насоса; и сигнальный процессор, соединенный с первичным преобразователем и опорным преобразователем. При этом сигнальный процессор содержит двухступенчатый фильтр, который выполнен с возможностью извлекать первичный сигнал из сигнала первичного преобразователя и сигнала опорного преобразователя. 3 н. и 17 з.п. ф-лы, 3 ил.
1. Буровая система, содержащая буровой насос, а также содержащая:
датчик, кодер, функционально соединенный с датчиком;
генератор импульсов давления, функционально соединенный с кодером, причем генератор импульсов давления выполнен с возможностью создавать первичный сигнал в ответ на входной сигнал из кодера;
первичный преобразователь для формирования сигнала первичного преобразователя в ответ на результат измерения первичного сигнала;
опорный преобразователь для формирования сигнала опорного преобразователя в ответ на отражение первичного сигнала от бурового насоса; и
сигнальный процессор, соединенный с первичным преобразователем и опорным преобразователем, при этом сигнальный процессор содержит двухступенчатый фильтр, который выполнен с возможностью извлекать первичный сигнал из сигнала первичного преобразователя и сигнала опорного преобразователя.
2. Буровая система по п. 1, в которой опорный преобразователь расположен в непосредственной близости от бурового насоса.
3. Буровая система по п. 2, в которой первичный преобразователь расположен на расстоянии от опорного преобразователя.
4. Буровая система по п. 3, в которой двухступенчатый фильтр содержит: адаптивный фильтр и фильтр нижних частот, выполненный с возможностью принимать выходной сигнал из адаптивного фильтра.
5. Буровая система по п. 4, в которой адаптивный фильтр принимает сигнал опорного преобразователя от опорного преобразователя.
6. Буровая система по п. 5, в которой адаптивный фильтр является адаптивным фильтром минимальной среднеквадратичной ошибки.
7. Буровая система по п. 6, в которой адаптивный фильтр имеет размер шага около 0,00003 и длину фильтра около 5000.
8. Буровая система по п. 4, в которой фильтр нижних частот выбран из группы, состоящей из фильтров с конечной импульсной характеристикой с окном Хемминга и фильтров с конечной импульсной характеристикой с окном Кайзера.
9. Буровая система по п. 4, дополнительно содержащая модуль декодера, который выполнен с возможностью декодировать выходной сигнал фильтра нижних частот.
10. Приемная система для использования при приеме и декодировании первичного импульсного сигнала давления, генерируемого инструментом измерения в процессе бурения (MWD), используемым в буровой системе, которая содержит буровой насос, являющийся источником шума импульсного сигнала давления, вызванного отражением первичного импульсного сигнала давления от бурового насоса, при этом приемная система содержит:
первичный преобразователь, который создает электрический сигнал в ответ на результат измерения первичного импульсного сигнала давления и шума импульсного сигнала давления, вызванного отражением первичного импульсного сигнала давления от бурового насоса,
опорный преобразователь, который создает электрический сигнал в ответ на результат измерения в первую очередь шума импульсного сигнала давления, вызванного отражением первичного импульсного сигнала давления от бурового насоса; и
сигнальный процессор, который содержит:
адаптивный фильтр, который создает первый отфильтрованный электрический сигнал из электрических сигналов, создаваемых первичным преобразователем и опорным преобразователем; и
фильтр нижних частот, который создает второй отфильтрованный электрический сигнал из первого отфильтрованного электрического сигнала.
11. Приемная система по п. 10, в которой опорный преобразователь расположен в непосредственной близости от бурового насоса.
12. Приемная система по п. 11, в которой первичный преобразователь расположен на расстоянии от опорного преобразователя.
13. Приемная система по п. 10, в которой адаптивный фильтр является адаптивным фильтром минимальной среднеквадратичной ошибки.
14. Приемная система по п. 13, в которой адаптивный фильтр имеет размер шага от приблизительно 0,0001 до приблизительно 0,00001 и длину фильтра от приблизительно 500 до приблизительно 10000.
15. Приемная система по п. 10, в которой фильтр нижних частот является фильтром с конечной импульсной характеристикой.
16. Приемная система по п. 10, дополнительно содержащая модуль декодера, который выполнен с возможностью декодировать второй отфильтрованный электрический сигнал, поступающий из фильтра нижних частот.
17. Способ обработки первичного импульсного сигнала давления, генерируемого инструментом измерения в процессе бурения (MWD), используемым в буровой системе, которая содержит буровой насос, являющийся источником шума импульсного сигнала давления, вызванного отражением первичного импульсного сигнала давления от бурового насоса, причем способ включает в себя этапы:
создание опорного электрического сигнала, причем опорный электрический сигнал создают в ответ на результат измерения в первую очередь шума импульсного сигнала давления;
создание первичного электрического сигнала, причем первичный электрический сигнал создают в ответ на результат измерения первичного импульсного сигнала давления и шума импульсного сигнала давления, вызванного отражением первичного импульсного сигнала давления от бурового насоса;
применение адаптивного фильтра к опорному электрическому сигналу и первичному электрическому сигналу для создания первого отфильтрованного электрического сигнала;
применение фильтра нижних частот к первому отфильтрованному электрическому сигналу для создания второго отфильтрованного электрического сигнала; и
декодирование первичного электрического сигнала из второго отфильтрованного электрического сигнала.
18. Способ по п. 17, в котором этап создания опорного электрического сигнала дополнительно включает в себя этап позиционирования опорного преобразователя в непосредственной близости от бурового насоса.
19. Способ по п. 17, в котором этап применения адаптивного фильтра дополнительно включает в себя применение адаптивного фильтра минимальной среднеквадратичной ошибки.
20. Способ по п. 19, в котором этап применения адаптивного фильтра минимальной среднеквадратичной ошибки включает в себя применение адаптивного фильтра минимальной среднеквадратичной ошибки с размером шага от приблизительно 0,001 до приблизительно 0,0001 для длины фильтра от приблизительно 500 до приблизительно 10000.
| US 2006098531 A1, 11.05.2006 | |||
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЛАЖНОСТИ ВОЗДУХА В ОБИТАЕМОМ ОТСЕКЕ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2361789C2 |
| ОБНАРУЖЕНИЕ ПРИТОКА ГАЗА В СТВОЛЕ СКВАЖИНЫ | 2012 |
|
RU2570211C2 |
| СИСТЕМА И СПОСОБ ИСКЛЮЧЕНИЯ ИМПУЛЬСОВ В ПРИЕМНИКЕ ИЛИ ПЕРЕДАТЧИКЕ | 2009 |
|
RU2461130C1 |
| US 2002180613 A1, 05.12.2002. | |||

