Настоящее изобретение относится к способу и системе для уклонения от столкновений для летательного аппарата, в частности транспортного самолета.
Более конкретно, изобретение относится к системе уклонения от столкновений, содержащей систему предупреждения столкновений, способную
- обнаружить риск столкновения с другим летательным аппаратом, далее именуемым летательный аппарат-нарушитель (т.е. летательный аппарат, который вторгается в пространство, находящееся близко к текущему положению рассматриваемого летательного аппарата), и
- при таком обнаружении выдать сигнал тревоги и определить информацию уклонения, которые будут описаны далее.
Маневр уклонения от летательного аппарата-нарушителя представляет собой сложный маневр, при котором экипаж должен уклониться от траектории летательного аппарата-нарушителя, сохраняя при этом управление собственным летательным аппаратом и траекторию его полета. При выполнении такого маневра возникают, в частности, две проблемы:
- пилот посылает летательный аппарат до предела или за пределы диапазонов своего полетного режима. Это вызывает добавление к первоначальному сигналу других сигналов тревоги;
- пилот выходит из своего плана полета для выполнения этого уклонения. При этом он рискует пересечь траекторию третьего летательного аппарата. В результате часто нарушается воздушное движение, в частности, в зонах подхода к большим аэропортам.
Известно, что система предупреждения столкновений, в частности система типа БСПС (Система предупреждения столкновений в воздухе, TCAS), позволяет контролировать траектории летательных аппаратов вблизи рассматриваемого летательного аппарата и представлять их соответствующие положения на экране, например навигационном дисплее (НД).
Эта система предупреждения столкновений основана на обмене информацией с помощью ответчиков. С помощью обмена данными высоты и расстояния, осуществляемого, например, ежесекундно, система предупреждения столкновений вычисляет траекторию любого летательного аппарата-нарушителя. Затем она оценивает потенциальную опасность и вычисляет соответствующий маневр для ее предупреждения. Этот маневр выполняется исключительно в вертикальной плоскости.
Летательные аппараты-нарушители обычно классифицируют по нескольким категориям в зависимости от их близости. При этом различают следующие сигналы предупреждения или тревоги:
- консультативное сообщение, позволяющее послать сигнал машинам, находящимся в пределах 25-40 секунд от данного летательного аппарата. Пилот должен следить за развитием траекторий этих машин, но на него не возлагается ни маневр, ни ограничение; и
- установленный сигнал тревоги или предупреждения (далее именуемый как сигнал тревоги) (консультативное сообщение по разрешению ситуации), который предупреждает о близкой опасности (менее 25 секунд). На основании данных, относящихся к этим двум летательным аппаратам (высота, расстояние и скорость), система предупреждения столкновений может выработать два возможных маневра:
- первый маневр, связанный с предупредительным сигналом, заключается в сохранении текущей траектории;
- второй маневр, связанный с корректирующим сигналом, заключается в выполнении подъема или снижения со скоростью, определенной системой предупреждения столкновений, до тех пор, пока не исчезнет опасность. Этот маневр выполняется исключительно в вертикальной плоскости.
При установленном сигнале тревоги или предупреждения типа консультативного сообщения по разрешению ситуации, обычно на шкале вертикальной скорости основного пилотажного экрана летательного аппарата представляется конкретный индикатор. На этой шкале отображены две зоны:
- красная зона, представляющая запретную зону вертикальной скорости, и
- зеленая зона, в которую пилот должен привести вертикальную скорость летательного аппарата, чтобы уклониться от летательного аппарата-нарушителя.
В случае корректирующего сигнала пилот должен соответствующим образом отключить автопилот и выполнить маневр уклонения вручную. Для этого он должен сдвинуть ручку управления для размещения вертикальной скорости в упомянутой безопасной зеленой зоне. На практике пилоты должны выдержать предельную вертикальную скорость между красной зоной и зеленой зоной.
Однако опыт показывает, что удерживание предварительной установки вертикальной скорости не является интуитивным для пилота. В частности, вертикальная скорость не является основным пилотажным параметром, таким как, например, высота полета или воздушная скорость. Поэтому у пилотов существует тенденция к превышению этой предварительной установки, что может привести к следующим последствиям:
- сильно изменить показатель нагрузки, что нарушает комфорт и безопасность пассажиров;
- резко изменить скорость и угол наклона, что вызывает риск выхода из диапазона режимов полета; и
- вызвать существенное отклонение траектории от первоначальной траектории, что приводит к нарушению воздушного движения в зонах плотного движения.
В соответствии с известным решением этих проблем на основном пилотажном экране отображается заданная предварительная установка уклонения, выраженная в показателях высоты. Для этого заданную предварительную установку вертикальной скорости преобразуют в значение высоты, которое легче контролировать пилоту. Это представление известно как «метки тангажа».
Однако ручное уклонение, выполняемое в данном случае, остается очень динамичным и не решает всех проблем, упомянутых выше (в частности, потому что показания тангажа или высоты вычисляют с относительно большим усилением, чтобы вынудить пилота выполнить быстрый маневр уклонения).
В основу настоящего изобретения положена задача устранения перечисленных выше недостатков. Изобретение относится к способу уклонения от столкновений, позволяющему устранить, при выполнении в процессе полета уклонения от летательного аппарата-нарушителя, резкие изменения коэффициента нагрузки посредством осуществления оптимального маневра и точного регулирования с обратной связью значения в отношении соответствующей предварительной установки.
Поставленную задачу позволяет решить способ уклонения от столкновений для летательного аппарата, содержащего систему предупреждения столкновений, способную
обнаружить риск столкновения, по меньшей мере, с одним летательным аппаратом-нарушителем и
при таком обнаружении выдать сигнал тревоги (т.е. корректирующий сигнал или предупредительный сигнал, описанные выше) и определить информацию уклонения,
отличающийся тем, что при выдаче сигнала тревоги
а) по меньшей мере, предварительные установки уклонения, позволяющие избежать любого столкновения при их применении к воздушному судну, определяются автоматически на основании соответствующей информации уклонения; для этого первые предварительные установки, выраженные в показателях вертикальной скорости и позволяющие избежать столкновения, определяются на основании упомянутой информации уклонения, и
b) эти предварительные установки уклонения передаются автоматически, по меньшей мере, одному средству обеспечения уклонения.
Предпочтительно, на этапе а) первые предварительные установки преобразуются в соответствующие предварительные установки, выраженные в показателях коэффициента нагрузки, чтобы сформировать предварительные установки уклонения. Предпочтительно, для преобразования первых предварительных установок, выраженных в показателях вертикальной скорости, в предварительные установки уклонения, выраженные в показателях коэффициента нагрузки, используют следующее выражение:
NZcom=K.(VZcurrent - VZtarget),
где NZcom - значение заданного коэффициента нагрузки, используемое для управления летательным аппаратом,
VZcurrent - величина текущей вертикальной скорости летательного аппарата,
VZtarget - величина целевой вертикальной скорости, и
К - переменная, зависящая от текущей скорости летательного аппарата.
Кроме того, в первом варианте первые предварительные установки определяются таким образом, чтобы они были как можно ближе к нулевой вертикальной скорости и, в то же время, соответствовали информации уклонения, и
во втором варианте первые предварительные установки определяются таким образом, чтобы минимизировать расхождение между траекторией уклонения летательного аппарата и исходной траекторией (до сигнала тревоги).
В первом варианте на этапе b) предварительные установки уклонения передаются автоматически в устройство автоматического управления летательного аппарата, способное реализовать режим управления, позволяющий вести летательный аппарат автоматически в соответствии с полученными предварительными установками уклонения, когда включен автопилот и запущен упомянутый режим управления.
Таким образом, устройство автоматического управления позволяет решить упомянутые выше проблемы, обусловленные ручным уклонением, выполняемым непосредственно пилотом. В частности, изобретение позволяет избежать резких изменений коэффициента нагрузки благодаря выполнению оптимального маневра и точного регулирования с обратной связью в отношении предварительной установки. Это повышает комфорт пассажиров, создает более высокий уровень безопасности для диапазона режимов полета, уменьшает отклонение от заданной высоты и тем самым уменьшает нарушения воздушного движения.
Известно, что устройство автоматического управления обеспечивает отличное исполнение всех захватов и всех поддержаний предварительных установок, а также лучшую воспроизводимость, чем пилоты. Также, маневр, выполняемый устройством автоматического управления, более комфортабелен и ближе к предварительной установке, чем маневр, выполняемый пилотом вручную.
Кроме того, автоматический маневр позволяет освободить пилота от задачи пилотирования (маневра уклонения), которая до сих пор выполнялась им вручную, и тем самым оставляет ему больше времени для идентификации одного или большего числа летательных аппаратов-нарушителей в этой весьма стрессовой ситуации.
Следует отметить, что в рамках настоящего изобретения
- установленный сигнал тревоги или предупреждения упомянутого выше типа «консультативное сообщение по разрешению ситуации» называется «сигнал тревоги». Такой сигнал тревоги может быть предупредительным или корректирующим, и
- если существует причина для различения этих двух видов сигнала тревоги, вид сигнала указывается специально.
В первом варианте при выдаче сигнала тревоги, если автопилот был задействован ранее,
- отображается сообщение, предупреждающее пилота о сигнале тревоги, и
- запускается режим управления (осуществляемый устройством автоматического управления), когда пилот активизирует пусковое средство, предусмотренное для этой цели.
Кроме того, во втором предпочтительном варианте при выдаче сигнала тревоги, если был ранее задействован автопилот, режим управления запускается автоматически при выдаче сигнала тревоги. Это позволяет освободить пилота от этой операции и всей процедуры уклонения. В этом случае предпочтительно пилот может остановить режим управления путем включения средства, предназначенного для этой цели.
Кроме того, предпочтительно
- в первом варианте при выдаче сигнала тревоги, если автопилот не задействован, режим управления запускается автоматически, когда пилот задействует автопилот, и
- во втором варианте, если автопилот не задействован, его задействуют автоматически, и режим управления запускается автоматически при выдаче сигнала тревоги.
Более того, предпочтительно, в случае замены корректирующего сигнала предупредительным сигналом ранее запущенный режим управления остается рабочим.
Кроме того, в конкретном варианте осуществления ранее запущенный режим управления останавливается автоматически, когда возникает одна из следующих ситуаций:
- пилот прекращает задействовать автопилот,
- пилот запускает другой режим управления,
- система предупреждения столкновений выдает сигнал «окончание тревоги».
Как вариант или дополнение первого варианта осуществления (в котором средство обеспечения уклонения содержит устройство автоматического управления) во втором варианте осуществления на этапе b) предварительные установки уклонения передаются автоматически командно-пилотажному прибору, который реализует режим отображения, позволяющий отображать информацию, представляющую упомянутые предварительные установки уклонения, когда он задействован и когда запущен режим отображения. Предпочтительно, упомянутая информация представляет предварительные установки коэффициента нагрузки.
Если второй вариант осуществления используется как модификация первого варианта, пилоту предоставляется информация, позволяющая ему выполнить ручное уклонение, следуя отображаемым предварительным установкам пилотирования.
Конечно, второй вариант можно также использовать в качестве дополнения к первому варианту. В этом случае маневр уклонения выполняется автоматически с помощью устройства автоматического управления, но пилот может контролировать его и в любой момент принять решение выполнить этот маневр вручную, в то же время пользуясь непрерывностью отображения на командно-пилотажном приборе при этом изменении режима пилотирования.
Различные режимы запуска режима отображения, реализуемые командно-пилотажным прибором, можно выполнить аналогично описанному выше режиму управления, осуществляемому устройством автоматического управления.
Следует отметить, что когда пилот прекращает задействовать автопилот, происходит выход из ранее запущенного режима управления, и режим отображения на командно-пилотажном приборе запускают или поддерживают включенным, если он уже был запущен.
Предпочтительно, при выдаче предупредительного сигнала
- при нахождении изначально в режиме управления, способном изменять вертикальную скорость летательного аппарата, задействуют режим поддержания вертикальной скорости, направляющий к текущей вертикальной скорости летательного аппарата,
- при нахождении изначально в режиме управления, гарантирующем постоянную вертикальную скорость, поддерживают этот режим управления.
Более того, предпочтительно, при выдаче корректирующего сигнала задействуют специальный режим управления, направляющий к целевой величине вертикальной скорости.
Кроме того, предпочтительно, при выдаче сигнала тревоги
- при нахождении изначально в режиме поперечного управления поддерживают этот режим поперечного управления, и
- при не включенном изначально режиме поперечного управления задействуют режим для поддержания текущего направления.
Кроме того, предпочтительно, при выдаче сигнала тревоги задействуют систему автоматического управления тягой двигателей летательного аппарата в режиме поддержания скорости, независимо от исходного состояния системы автоматического управления тягой.
Кроме того, предпочтительно, при выдаче предупредительного сигнала для выхода из маневра уклонения, когда система предупреждения столкновений выдает сигнал «окончание тревоги», поддерживаются режимы управления, используемые при этом маневре уклонения.
Предпочтительно, при выдачи корректирующего сигнала для выхода из маневра уклонения, когда система предупреждения столкновений выдает сигнал «окончание тревоги», задействуют режим, позволяющий возвратиться на исходную траекторию. Для этого, предпочтительно,
- в продольном направлении задействуют режим поддержания вертикальной скорости и задействуют режим захвата высоты, чтобы захватить целевую высоту, когда летательный аппарат достигает ее, чтобы возвратиться на исходную траекторию, и
- в поперечном направлении поддерживают текущий режим управления.
Кроме того, предпочтительно, при изменении сигнала тревоги в ходе маневра уклонения этот маневр инициализируется снова.
Предпочтительно, при выдаче предупредительного сигнала, если задействован режим захвата высоты, его поддерживают задействованным.
Кроме того, предпочтительно, при выдаче корректирующего сигнала, если задействован режим захвата высоты, то
- если заранее определенное значение «0 фут/мин» не находится в запретной области вертикальной скорости, режим захвата высоты поддерживают включенным,
- в противном случае его отключают.
Кроме того, предпочтительно, при выдаче предупредительного сигнала режим уклонения представляют пилоту как задействованный, и это делается в соответствии с первым конкретным представлением.
Предпочтительно, при выдаче корректирующего сигнала режим уклонения представляют пилоту как задействованный, и это делается в соответствии со вторым конкретным представлением.
Настоящее изобретение также относится к системе уклонения для летательного аппарата, в частности гражданского транспортного самолета.
В соответствии с изобретением предложена система уклонения, содержащая систему предупреждения столкновений, способную
- обнаружить риск столкновения, по меньшей мере, с одним летательным аппаратом-нарушителем и
- при таком обнаружении выдать сигнал тревоги и определить информацию уклонения,
отличающаяся тем, что она дополнительно содержит
- вычислительные средства (предпочтительно являющиеся частью автопилота) для автоматического определения при выдачи сигнала тревоги на основании информации уклонения, полученной от системы предупреждения столкновений, по меньшей мере, предварительных установок уклонения, которые позволяют избежать любого столкновения при их применении к летательному аппарату, причем упомянутые вычислительные средства содержат средство для определения на основании информации уклонения первых предварительных установок, выраженных в показателях вертикальной скорости и позволяющих избежать столкновения, и
- по меньшей мере, одно средство обеспечения уклонения, подключенное к вычислительным средствам.
Предпочтительно, упомянутые вычислительные средства дополнительно содержат средство для преобразования этих первых предварительных установок в соответствующие предварительные установки, выраженные в показателях коэффициента нагрузки, для формирования упомянутых предварительных установок уклонения.
В одном конкретном варианте система уклонения содержит средство отображения, предназначенное для отображения при выдаче сигнала тревоги, сообщения, предупреждающего пилота о сигнале тревоги.
В первом варианте осуществления упомянутое средство обеспечения уклонения содержит устройство автоматического управления, способное реализовать режим управления, позволяющий вести летательный аппарат автоматически в соответствии с предварительными установками уклонения, полученными от упомянутых вычислительных средств.
В этом случае, предпочтительно, система уклонения может дополнительно содержать пусковое средство, активизируемое пилотом и позволяющее при его активизации запустить режим управления, осуществляемый устройством автоматического управления.
Во втором варианте средство обеспечения уклонения содержит командно-пилотажный прибор, реализующий режим отображения, позволяющий отображать информацию, представляющую предварительные установки уклонения, полученные от вычислительных средств.
В этом случае, предпочтительно, система уклонения может дополнительно содержать пусковое средство, активизируемое пилотом и позволяющее при его активизации запустить режим отображения, осуществляемый командно-пилотажным прибором.
Прилагаемые чертежи поясняют, как можно реализовать настоящее изобретение. Аналогичные элементы обозначены на чертежах одинаковыми ссылочными номерами.
Фиг.1 - схема системы уклонения в соответствии с настоящим изобретением.
Фиг.2 - схема маневра уклонения.
Фиг.3 и 4 - два графика, иллюстрирующие маневр уклонения в соответствии с настоящим изобретением в двух различных ситуациях.
Фиг.5А - график, а Фиг.5 В - соответствующее контрольное средство отображения, иллюстрирующие конкретные характеристики уклонения.
Фиг.6А и 6В, 7А и 7В, 8А и 8В, 9А и 9В (или 9С) подобны Фиг.5А и 5В, но относятся к другим примерам маневра уклонения.
Система 1 в соответствии с настоящим изобретением, схематически представленная на фиг.1, находится на борту летательного аппарата А, в частности транспортного самолета, и предназначена для выполнения уклонения при полете от летательного аппарата-нарушителя 2, как показано на фиг.2.
Для выполнения такого уклонения при полете система 1 уклонения содержит стандартную систему 3 предупреждения столкновений, в частности типа БСПС (бортовая система предупреждения столкновений в воздухе, TCAS), которая контролирует траектории различных летательных аппаратов 2 вблизи летательного аппарата А (на борту которого она находится) и которая способна
- обнаружить риск столкновения, по меньшей мере, с одним летательным аппаратом-нарушителем 2 и
- при этом обнаружении выдать сигнал тревоги (корректирующий или предупредительный) и определить информацию уклонения, описанную ниже.
Такой сигнал тревоги выдается, когда летательный аппарат-нарушитель 2 находится на заданном расстоянии D (обычно выраженном в показателях длительности полета) от летательного аппарата А. Маневр уклонения заключается в следующем:
- в случае предупредительного сигнала поддерживают текущую вертикальную скорость и
- в случае корректирующего сигнала выполняют подъем (или снижение) летательного аппарата А с заданной скоростью до тех пор, пока не исчезнет опасность.
Этот маневр выполняется, в частности, в вертикальной плоскости, как будет описано далее, между положением Р1 начала маневра уклонения и положением Р2 конца маневра уклонения, следуя по траектории уклонения Т.
В соответствии с настоящим изобретением система 1 уклонения выполнена с возможностью выполнения уклонения по траектории уклонения Т. В описанном ниже частном варианте система 1 уклонения также позволяет выполнять горизонтальное уклонение.
В соответствии с настоящим изобретением система 1 уклонения содержит в дополнение к упомянутой системе 3 предупреждения столкновений:
- вычислительные средства 4 (предпочтительно соответствующие автопилоту), которые подключены посредством линии 5 связи к системе 3 предупреждения столкновений, предназначенные для автоматического определения при выдаче сигнала тревоги упомянутой системой на основании информации уклонения, полученной от системы 3 предупреждения столкновений, по меньшей мере, предварительных установок уклонения, позволяющих избежать риска столкновения для летательного аппарата при их применении к летательному аппарату А, и
- по меньшей мере, одно устройство 6, 21 обеспечения уклонения, подключенное к вычислительным средствам 4 посредством линии 7, 22 связи.
В первом варианте устройство обеспечения уклонения содержит устройство 6 автоматического управления, способное реализовать режим управления (автоматически), позволяя управлять летательным аппаратом А автоматически в соответствии с предварительными установками уклонения, полученными от вычислительного средства 4, когда, с одной стороны, задействованы вычислительные средства 4 (автопилот) и, с другом стороны, запущен режим управления. Для этого устройство 6 автоматического управления стандартным образом определяет команды отклонения в соответствии с предварительными установками уклонения (выраженными в показателях коэффициента нагрузки) и передает их стандартным рулевым машинам стандартных рулевых поверхностей, в частности, рулям высоты летательного аппарата А. В одном конкретном варианте эти команды отклонения могут также определяться непосредственно вычислительными средствами 4.
Известно, что устройство 6 автоматического управления обеспечивает отличное выполнение всех захватов и всех поддержаний предварительных установок, а также лучшую воспроизводимость, чем пилот. Кроме того, маневр, выполняемый устройством 6 автоматического управления, более точен и ближе к предварительным установкам, чем маневр, выполняемый пилотом вручную.
Кроме того, автоматический маневр позволяет освободить пилота от задачи пилотирования (выполнявшейся до этого вручную), давая ему тем самым больше времени, в частности, для идентификации одного или большего числа летательных аппаратов-нарушителей 2 в такой весьма стрессовой ситуации (нарушения и уклонения).
Система 1 уклонения в соответствии с настоящим изобретением позволяет избежать резких изменений коэффициента нагрузки благодаря выполнению оптимального маневра и точному регулированию с обратной связью по отношению к предварительной установке. Это обеспечивает, в частности, больший комфорт на уровне летательного аппарата А для пассажиров и более высокий уровень безопасности для диапазона режимов полета, минимальное расхождение с заданной высотой и, следовательно, меньшее нарушение воздушного движения.
Корме того, следует отметить, что система 1 уклонения позволяет воздушному судну А следовать информации, предоставляемой системой 3 предупреждения столкновений, оставаясь при этом как можно ближе к заданной высоте и сохраняя, в основном, следование плану поперечного полета.
В одном конкретном варианте вычислительные средства 4 содержат, как показано на фиг.1:
- средство 8 для определения описанным ниже способом на основании информации уклонения, также описанной ниже и полученной от упомянутой системы 3 предупреждения столкновений по линии связи 5, первых предварительных установок, выраженных в показателях вертикальной скорости и позволяющих избежать столкновения, и
- средство 9, подключенное посредством линии 10 связи к средству 8, для преобразования стандартным образом этих первых предварительных установок (вертикальной скорости) в соответствующие предварительные установки, выраженные в показателях коэффициента нагрузки, чтобы сформировать предварительные установки уклонения (которые передаются устройству 6 автоматического уклонения по линии 7 связи).
В одном конкретном варианте осуществления вычислительные средства 4 также определяют (на основании информации уклонения, полученной от системы 3 предупреждения столкновений) дополнительные предварительные установки уклонения, позволяющие выполнить уклонение в поперечной плоскости, а также передают эти дополнительные предварительные установки уклонения на устройство 6, 21 обеспечения уклонения.
Кроме того, в одном конкретном варианте осуществления средства 9 реализуют следующие этапы для вычисления предварительной установки коэффициента нагрузки Nz:
- вычисляют разность между первой предварительной установкой вертикальной скорости, полученной от средства 8, и измеренной (стандартным методом) вертикальной скоростью летательного аппарата А;
- применяют фильтр к этой разности (фильтруют по времени, чтобы отфильтровать краткие изменения в течение времени); и
- умножают эту отфильтрованную разность на коэффициент, зависящий от скорости летательного аппарата А (предпочтительно воздушной скорости, например, КВС (Калиброванной Воздушной Скорости, VCAS)).
В рамках настоящего изобретения режим управления, осуществляемый устройством 6 автоматического управления, может быть запущен различными способами.
С этой целью в первом конкретном варианте система 1 уклонения дополнительно содержит:
- средство 11 отображения, которое, например, подключено посредством линии 12 связи к вычислительным средствам 4 для отображения, в частности, на экране 13 (например, основном пилотажном экране), при выдаче сигнала тревоги предупреждающего сообщения, которое предупреждает пилота об этом сигнале тревоги и предлагает ему активизировать пусковое средство 14А, предусмотренное для этой цели (и являющееся частью комплекта 14 пускового средства, показанного в обобщенном схематическом виде на фиг.1); и
- упомянутое пусковое средство 14А, активизируемое пилотом и позволяющее при его активизации запустить режим управления, осуществляемый устройством 6 автоматического управления (к которому оно подсоединено, например, посредством линии 15 связи).
На фиг.3 представлено изменение вертикальной скорости V в зависимости от времени t в примере, относящемся к первому описанному выше конкретному варианту осуществления. Вертикальная скорость летательного аппарата А показана кривой VS. Кроме того, на фиг.3 показана запретная зона Z1, соответствующая выдаче корректирующего сигнала тревоги и определенная вертикальными скоростями V1, V2 и V3.
При этом подразумевается, что автопилот 4 был задействован ранее и управляет летательным аппаратом А с исходной скоростью Vi. В момент времени t1 система 3 предупреждения столкновений выдает корректирующий сигнал, и средство 11 отображения выдает предупреждающее сообщение. В следующий момент t2 пилот активизирует пусковое средство 14А и, тем самым, запускает режим управления, осуществляемый устройством 6 автоматического управления, что вызывает автоматическое изменение вертикальной скорости до предела запретной зоны Z1 (скорости V3, достигнутой в момент t3).
Летательный аппарат А пилотируется автоматически на скорости V3 до момента t4, когда система 3 предупреждения столкновений выдаст сигнал «окончание тревоги». При этом режим автоматического управления прекращается, и летательный аппарат А выводится на нулевую вертикальную скорость (достигаемую в момент t5).
Кроме того, во втором предпочтительном варианте автопилот 4 и устройство 6 автоматического управления выполнены таким образом, что режим управления запускают автоматически при выдаче сигнала тревоги системой 3 предупреждения столкновений, если автопилот 4 был задействован ранее. Это позволяет освободить пилота от обязанности выполнения этого запуска, а значит и всей процедуры уклонения, которая выполняется автоматически. Однако в этом случае пилот может остановить режим управления путем активизации соответствующего пускового средства 14В, предусмотренного для этой цели (и составляющего часть комплекта 14), в частности, в случае несвоевременного запуска.
Кроме того, в соответствии с настоящим изобретением при выдаче сигнала тревоги, если в данный момент автопилот 4 не задействован, в соответствии с первым вариантом режим управления, осуществляемый устройством 6 автоматического управления, не запускают. Однако его запускают автоматически, как только пилот задействует упомянутый автопилот 4, как представлено на фиг.4.
На фиг.4 представлена запретная зона Z2, определенная вертикальными скоростями V4, V5 и V6, и летательный аппарат А сначала имеет вертикальную скорость Vi. Автопилот 4 не задействован. В момент t6 летательный аппарат А входит в зону Z2, и выдается корректирующий сигнал. Режим управления не запускается, пока автопилот 4 остается не задействованным. В момент t7 пилот задействует автопилот 4, автоматически запуская тем самым режим управления, осуществляемый устройством 6 автоматического управления. Затем вертикальная скорость переходит от Vi к V6 между временем t7 и t8. В последующий момент t9 выдается сигнал «окончание тревоги», и вертикальная скорость приводится к нулевой скорости (достигаемой в момент t10).
Кроме того, в соответствии со вторым вариантом, если автопилот 4 не задействован, его задействуют автоматически и режим управления запускают автоматически при выдаче сигнала тревоги.
В соответствии с настоящим изобретением, если (корректирующий) сигнал тревоги, выданный системой 3 предупреждения столкновений, заменяется предупредительным сигналом описанного выше типа, который также выдается системой 3 предупреждения столкновений, то запущенный ранее режим управления не останавливается и остается активным.
Дополнительно, в одном конкретном варианте осуществления ранее запущенный режим управления выключается автоматически, когда возникает одна из следующих ситуаций:
- пилот прекращает задействовать автопилот 4;
- пилот запускает другой режим управления;
- система 3 предупреждения столкновений выдает сигнал «окончание тревоги». В этом случае
- в первом варианте, как было указано выше (фиг.3 и 4), вертикальная скорость летательного аппарата А выводится обратно на нулевую скорость, и
- во втором варианте вертикальная скорость летательного аппарата А выбирается как можно ближе к исходной траектории (до сигнала тревоги).
В рамках настоящего изобретения упомянутое средство 8 определяет первые предварительные установки таким образом, чтобы
- в первом варианте быть как можно ближе к нулевой вертикальной скорости и при этом соответствовать информации уклонения, полученной из системы 3 предупреждения столкновений, и
- во втором варианте минимизировать расхождение между траекторией Т уклонения летательного аппарата А и траекторией, которую оно имело до сигнала тревоги.
Система 3 предупреждения столкновений выдает стандартным образом в качестве информации уклонения в зависимости от ситуации:
- индикацию В1, показывающую наличие верхней запретной зоны (в показателях вертикальной скорости),
- индикацию В2, показывающую наличие нижней запретной зоны (в показателях вертикальной скорости),
- величину Vinf, соответствующую нижнему пределу вертикальной скорости VS в случае индикации В2, и
- величину Vsup, соответствующую верхнему пределу вертикальной скорости VS в случае индикации В1.
Следовательно, корректирующий сигнал тревоги выдается системой 3 предупреждения столкновений, когда
- присутствует индикация В1 или В2, и
- вертикальная скорость VS летательного аппарата А больше, чем Vsup, или меньше, чем Vinf.
Данные В1, В2, VS, Vinf и Vsup могут быть отображены на вертикальной шкале 16 скорости, расположенной вертикально и связанной со стандартным изображением 17, которое содержит, в частности, символ 18 летательного аппарата А и линию горизонта 19, как показано на фиг.5В, 6В, 7В и 8В. Это изображение 17 и соответствующая шкала 16 вертикальной скорости могут быть представлены на стандартном экране 20 управления, например, с помощью средства 11 отображения.
В случае одного летательного аппарата-нарушителя 2 средства 8 определяют первые предварительные установки (вертикальной скорости) так, чтобы летательный аппарат А принял вертикальную скорость VS:
- которая равная нулю, если эта величина не запрещена (фиг.5А и 5В). В этом случае предпочтительно удерживать уровень, или
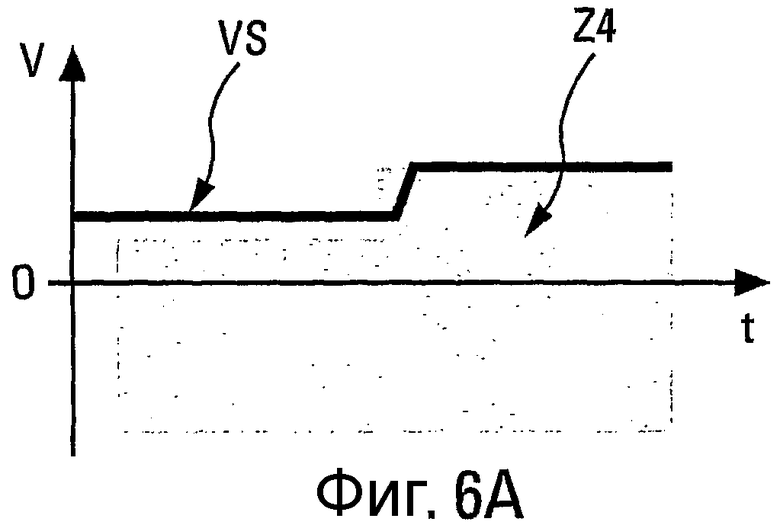
- скорость, соответствующую данной предварительной установке, а именно Vinf на фиг.6А и 6В (то есть пределу запретной зоны Z4).
Индикация В2 на фиг.5В связана с запретной зоной Z3 на фиг.5А, а индикация В2 на фиг.6В связана с запретной зоной Z4 на фиг.6А.
Кроме того, в случае двух или большего числа летательных аппаратов-нарушителей 2 средства 8 определяют первые предварительные установки (вертикальной скорости), чтобы летательный аппарат А принял вертикальную скорость VS,
- которая равная нулю, если эта величина не запрещена (фиг.7А и 7В), и
- которая в противном случае соответствует меньшей из величин Vinf и Vsup в показателях абсолютного значения (фиг.8А и 8В). Таким образом, скорость подъема или снижения ограничена меньшей величиной, чтобы отклонение от текущей высоты было как можно меньше (а значит как можно ближе к нулевой вертикальной скорости).
Индикации В1 и В2 на фиг.7В связаны соответственно с запретными зонами Z5А и Z5В на фиг.7А, а индикации В1 и В2 на фиг.8В связаны соответственно с запретными зонами Z6А и Z6В на фиг.8А. Кроме того, на фиг.7А и 7В представлен символ 23, иллюстрирующий командно-пилотажный прибор, содержащий горизонтальную черту и вертикальную черту, соответствующие положению, к которому необходимо привести символ летательного аппарата, чтобы следовать предварительной установке.
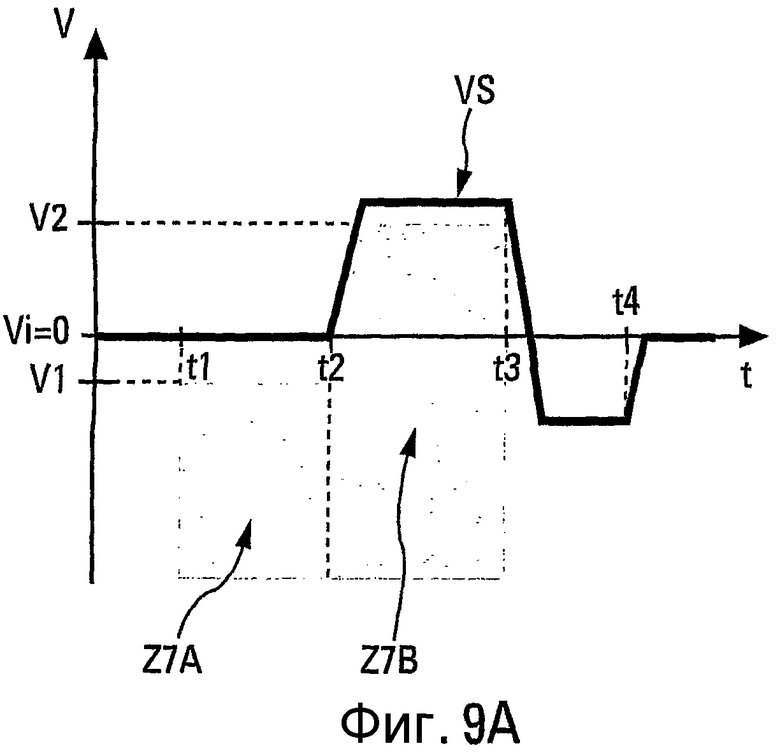
На фиг.9А, 9В и 9С показан второй пример, соответствующий случаю, в котором первые предварительные установки определяют таким образом, чтобы минимизировать расхождение между траекторией Т уклонения летательного аппарата А и исходной траекторией, в предпочтительном варианте, в котором режим управления задействуют автоматически при выдаче сигнала тревоги, если автопилот 4 был задействован ранее. Фиг.9А подобна фиг.5А, 6А, 7А и 8А. Фиг.9В и 9С подобны фиг.5В, 6В, 7В и 8В.
На фиг.9А представлено изменение вертикальной скорости V в зависимости от времени t. Вертикальная скорость летательного аппарата А показана кривой VS. На фиг.9А показана запретная зона Z7А, соответствующая выдаче сначала предупредительного сигнала, определенного вертикальной скоростью V1, а также запретная зона Z7В, соответствующая выдаче корректирующего сигнала, определенного вертикальной скоростью V2, после предупредительного сигнала.
Предполагается, что автопилот 4 был задействован ранее и ведет летательный аппарат А на уровне полета с исходной вертикальной скоростью Vi=0. В момент времени t1 система 3 предупреждения столкновений выдает предупредительный сигнал. На фиг.9В показан основной пилотажный экран ОПСО (Основного Полетного Средства Отображения, PFD). На индикаторе 16 вертикальной скорости текущая скорость VS летательного аппарата А в этот момент находится вне запретной зоны В2. По этой причине автопилот 4 не изменяет траекторию летательного аппарата А и остается в текущем режиме работы, показывая включение режима уклонения голубой меткой «БСПС» во второй строке стандартного индикатора режима (не показан).
В момент времени t2 система 3 предупреждения столкновений выдает корректирующий сигнал. В этот момент автопилот 4 задействуют в режиме уклонения, о чем сообщает зеленая метка «БСПС» в первой строке упомянутого выше индикатора режима. Автопилот 4 вычисляет заданную скорость VS большей, чем элемент информации уклонения, предоставленный системой 3 предупреждения столкновений, показанный запретной зоной Z7В на фиг.9А. Он изменяет траекторию летательного аппарата А, чтобы привести его к этой заданной скорости; это показано на фиг.9С на индикаторе скорости 16, где скорость VS расположена выше запретной зоны В2.
В момент времени t3 система 3 предупреждения столкновений выдает информационный элемент «окончание тревоги». Автопилот 4 выходит из режима уклонения, чтобы автоматически войти в режим, позволяющий восстановить исходную траекторию. Вертикальная скорость VS уменьшается до отрицательного значения, при котором она поддерживается до тех пор, пока летательный аппарат А не захватит исходный уровень высоты в момент t4.
Кроме того, на фиг.9В и 9С показан символ 23, иллюстрирующий командно-пилотажный прибор, содержащий горизонтальную черту и вертикальную черту и соответствующий положению, к которому следует привести символ летательного аппарата А, чтобы следовать предварительным установкам.
Как модификация или дополнение к первому вышеупомянутому варианту осуществления (в котором средство обеспечения уклонения содержит устройство 6 автоматического уклонения) во втором варианте осуществления средство обеспечения уклонения содержит командно-пилотажный прибор 21, соединенный посредством линии 22 связи с вычислительными средствами 4 (автопилотом) и реализующий режим отображения, позволяющий отображать информацию, представляющую предварительные установки уклонения, полученные из вычислительных средств 4, когда он задействован и когда запущен режим отображения. Предпочтительно, эта информация представляет предварительные установки коэффициента нагрузки.
Когда второй вариант осуществления используют в качестве модификации первого варианта осуществления, командно-пилотажный прибор 21 предоставляет пилоту информацию, позволяющую ему выполнять ручное уклонение, следуя отображаемым предварительным установкам.
Конечно, этот второй вариант осуществления можно также использовать как дополнение к первому варианту осуществления. В этом случае маневр уклонения выполняется автоматически с помощью устройства 6 автоматического управления (как было описано выше), но пилот может контролировать его и в любой момент принять решение возобновить выполнение маневра уклонения вручную, пользуясь при этом непрерывным отображением на командно-пилотажном приборе 21 при изменении режима пилотирования (автоматического режима на ручной).
Различные режимы запуска режима отображения, осуществляемые командно-пилотажным прибором 21, соответствуют, по аналогии, описанным выше по отношению к режиму управления, осуществляемым устройством 6 автоматического управления. Для этого система 1 уклонения может, в частности, содержать пусковые средства 14С и 14D, подобные пусковым средствам 14А и 14В, описанным выше, которые также составляют часть набора 14.
Настоящее изобретение также имеет следующие характеристики (описанные ниже в пунктах А-Н) и содержит средства, позволяющие осуществить эти характеристики.
А. Продольное поведение летательного аппарата А при маневре в зависимости от вида сигнала тревоги
В случае предупредительного сигнала возможны две ситуации:
- при нахождении изначально в режиме управления, позволяющем изменить вертикальную скорость летательного аппарата А (например, в режиме захвата луча «глиссады посадки по приборам» в фазе захода на посадку), предусматривается задействование режима поддержания вертикальной скорости, направляющего летательный аппарат А к текущей вертикальной скорости, и
- при нахождении изначально в режиме управления, гарантирующем постоянную вертикальную скорость (например, в режиме поддержания высоты), поддерживают текущий режим управления (без прекращения задействования конкретного режима уклонения БСПС).
В случае корректирующего сигнала предусматривается задействование специального режима уклонения БСПС, направляющего к целевому значению вертикальной скорости. Это целевое значение выбирается при предельном значении 100 футов/мин, переданном системой 3 предупреждения столкновений.
Также предусмотрены следующие конкретные ситуации:
- если предельное (граничное) значение равно 0 футов/мин, используется 0 футов/мин, и
- если предельное значение равно текущей вертикальной скорости летательного аппарата А (сигналы тревоги типа поддержания вертикальной скорости), используется текущая вертикальная скорость.
В. Поперечное поведение летательного аппарата А при маневре
Поддерживают текущий режим поперечного управления. Следовательно, если летательный аппарат А в момент сигнала тревоги осуществляет поворот, этот поворот поддерживают.
Если режим управления изначально отсутствует (ни автопилот, ни командно-пилотажный прибор не задействованы), то задействуют режим поддержания текущего направления.
С. Логика системы автоматического контроля тяги
Независимо от исходного состояния стандартной системы автоматического контроля тяги двигателей летательного аппарата А при сигнале тревоги, систему автоматического контроля тяги задействуют (в момент сигнала тревоги) в режиме поддержания скорости. Целевой скоростью, используемой в этом режиме поддержания скорости, является текущая скорость в момент сигнала тревоги.
D. Логика для выхода из маневра уклонения
После предупредительного сигнала не предусмотрено никакого изменения. Поддерживаются режимы управления (продольного и поперечного), используемые для маневра уклонения.
Кроме того, в случае корректирующего сигнала тревоги:
для характеристик продольного поведения:
- задействуют режим поддержания вертикальной скорости.
Целевое значение выбирают следующим образом:
• если летательный аппарат А находится выше текущей целевой высоты (целевая высота выбирается постоянно и обычно соответствует последнему разрешению от диспетчерской службы), выбирается значение минус 1000 футов/мин;
• если летательный аппарат А находится ниже текущей целевой высоты, выбирается положительное значение в зависимости от текущей высоты Alt (чтобы гарантировать, что выполнение подъема летательного аппарата А на текущей высоте позволит достичь этого целевого значения):
+1000 фут/мин, если Alt≤20000 футов;
+500 фут/мин, если 20000<Alt≤30000 футов; и
+300 фут/мин, если Alt>30000 футов;
- и задействуют режим захвата высоты, чтобы захватить целевую высоту, когда летательный аппарат А ее достигнет; и
для характеристик поперечного поведения поддерживают текущий режим управления.
Кроме того, экипаж может в любой момент возобновить управление с помощью стандартных средств, в частности:
- стандартных кнопок типа «инстинктивного отключения» (расположенных на боковых рукоятках и на рычагах управления тягой), чтобы отключить автопилот и/или рычаг автоматического управления, и
- стандартных кнопок для задействования/прекращения задействования автопилота, командно-пилотажного прибора и рычага автоматического управления,
- стандартных интерфейсов для выбора другого режима управления.
Е. Поведение в случае изменения сигнала тревоги в ходе маневра
Следует отметить, что сигнал тревоги часто изменяется при выполнении маневра, в частности:
- при изменении предельного значения и
- при переходе от корректирующего сигнала тревоги к предупредительному сигналу или наоборот.
В случае изменения сигнала тревоги маневр инициализируется снова, т.е.
- учитывается новое предельное значение, и
- снова задействуют подходящий режим управления (например, снова задействуют специальный режим БСПС, если команда возобновила управление после первого сигнала тревоги).
F. Логика захвата высоты в ходе выполнения маневра
Если в случае предупредительного сигнала в момент выдачи этого предупредительного сигнала был включен режим захвата высоты, его поддерживают включенным. Это позволяет захватить целевую высоту, чтобы избежать пересечения этого целевого значения и, тем самым, нарушения окружающего воздушного движения (формирования новых сигналов опасности).
Следует отметить, что в случае предупредительного сигнала значение 0 футов/мин никогда не бывает в красной зоне. Захват высоты всегда вызывает уход текущей вертикальной скорости из красной зоны.
Если в случае корректирующего сигнала тревоги в момент его выдачи был включен режим захвата высоты, то
- если значение 0 футов/мин не находится в запретной области вертикальной скорости (красной зоне), режим захвата высоты поддерживают включенным (по тем же причинам, что и выше);
- в противном случае его выключают.
G. Математический закон, используемый для выработки управления
В настоящем изобретении предпочтительно используют следующий закон для преобразования целевой вертикальной скорости (VZtarget) в показатель нагрузки (ПН, NZ):
NZcom=K. (VZcurrent - Vztarget),
где
- NZcom - значение заданного коэффициента нагрузки, используемое для управления летательным аппаратом А;
- VZtarget - значение целевой вертикальной скорости, выбранное в зависимости от предварительных установок, полученных от системы 3 предупреждения столкновений, и
- VZcurrent - значение текущей вертикальной скорости летательного аппарата А, и
- К - переменная, зависящая от текущей скорости летательного аппарата А.
Н. Интерфейсы человек-машина
В случае предупредительного сигнала специальный режим БСПС представляется пилоту, как включенный (например, отображается голубым во второй строке зоны сигнализатора режима полета на основном пилотажном экране).
В случае корректирующего сигнала специальный режим БСПС представляется пилоту, как задействованный (например, отображается зеленым в первой строке зоны сигнализатора режима полета на основном пилотажном экране).
Во всех случаях поддерживаются существующие отображения БСПС.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ СО ВСТРОЕННОЙ СИСТЕМОЙ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИЯХ | 2012 |
|
RU2597047C2 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| Способ предупреждения столкновения беспилотного аппарата с воздушным судном | 2023 |
|
RU2811621C1 |
| СИСТЕМА С УСТРОЙСТВОМ АВИАЦИОННОЙ ЭЛЕКТРОНИКИ И НАЗЕМНОЙ СТАНЦИЕЙ ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОТКЛОНИВШИМСЯ ОТ МАРШРУТА, И ДЛЯ АВАРИЙНОЙ СВЯЗИ | 2003 |
|
RU2318243C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАКОНА НАВЕДЕНИЯ ДЛЯ УКЛОНЕНИЯ ОТ ПРЕПЯТСТВИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ЭЛЕКТРОННАЯ СИСТЕМА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2683718C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |












Изобретение относится к области приборостроения и может быть использовано в системах безопасности пилотирования летательных аппаратов. Технический результат - расширение функциональных возможностей. Для достижения данного результата система (1) уклонения содержит систему (3) предупреждения столкновений. Вычислительные средства (4) для автоматического определения степени уклонения после сигнала тревоги на основании информации уклонения, полученной из системы (3) и систем (6, 21) обеспечения предупреждения уклонения, помогав избежать столкновения летательных аппаратов. 4 н. и 41 з.п. ф-лы, 9 ил.
при таком обнаружении выдать сигнал тревоги и определить информацию уклонения, в котором при выдаче сигнала тревоги
a) по меньшей мере, предварительные установки уклонения, позволяющие избежать любого столкновения при их применении к воздушному судну (А), определяют автоматически на основании соответствующей информации уклонения для того, чтобы сделать это, первые предварительные установки, выраженные в показателях вертикальной скорости и позволяющие избежать столкновения, определяют на основе упомянутой информации уклонения, и
b) эти предварительные установки уклонения передают автоматически, по меньшей мере, одному средству (6, 21) обеспечения уклонения.
запускают упомянутый режим управления, когда пилот активизирует пусковое средство, предусмотренное для этой цели.
пилот прекращает использовать автопилот (4),
пилот запускает другой режим управления,
система (3) предупреждения столкновений выдает сигнал «окончания тревоги».
отображают сообщение для предупреждения пилота о сигнале тревоги и запускают упомянутый режим отображения, когда пилот активирует пусковое средство, предусмотренное для этой цели.
при нахождении изначально в режиме управления, способном изменять вертикальную скорость летательного аппарата (А), включают режим поддержания вертикальной скорости, направляющий к текущей вертикальной скорости летательного аппарата (А), и
при нахождении изначально в режиме управления, гарантирующем постоянную вертикальную скорость, поддерживают этот режим управления.
если изначально режим поперечного управления не был задействован, включают режим для поддержания текущего направления.
в поперечном направлении поддерживают текущий режим управления.
в противном случае он отключается.
где NZcom - значение заданного коэффициента нагрузки, используемое для управления летательным аппаратом (А),
VZcurrent - значение текущей вертикальной скорости летательного аппарата (А),
VZtarget - значение целевой вертикальной скорости и
K - переменная, зависящая от текущей скорости летательного аппарата (А).
обнаружить риск столкновения, по меньшей мере, с одним воздушным летательным аппаратом-нарушителем (2) и
при таком обнаружении выдать сигнал тревоги и определить информацию уклонения, которая дополнительно содержит вычислительные средства (4) для автоматического определения при выдаче сигнала тревоги на основании информации уклонения, полученной от системы (3) предупреждения столкновений, по меньшей мере, предварительных установок уклонения, позволяющих избежать любого столкновения при их применении к воздушному судну (А), причем упомянутые вычислительные средства (4) содержат средство (8) для определения на основании информации уклонения первых предварительных установок, выраженных в показателях вертикальной скорости и позволяющих избежать столкновения, и,
по меньшей мере, одно средство (6, 21) обеспечения уклонения, соединенное с упомянутыми вычислительными средствами (4).
| US 3530465 А, 22.09.1970 | |||
| US 6510388 А, 21.01.2003 | |||
| Смазка для металлических форм | 1975 |
|
SU545473A1 |
| US 6150960 А, 21.11.2000 | |||
| US 6057786 А, 02.05.2000 | |||
| US 6937166 А, 30.08.2005. | |||

