Изобретение относится к системам управления движением в атмосфере Земли летательных аппаратов и кораблей и может быть применено при управлении средствами поисково-спасательного обеспечения спускаемых космических аппаратов.
Известные требования, предъявляемые к поисково-спасательному обеспечению полетов различных спускаемых космических аппаратов [1] определяют номинальное время поиска, обнаружения и оказания первой помощи экипажу, при приземлении или приводнении спускаемого аппарата в пределах штатного полигона посадки, которое составляет не более 1 часа.
В соответствии с Приложением 12 Международной организации гражданской авиации (ИКАО), [2] Правительством Российской Федерации на Федеральную аэронавигационную службу (Росаэронавигацию), а после объединения Росаэронавигации с Росавиацией (2009 г.), на Росавиацию, как на федеральный руководящий орган единой системы, возложены функции по организации и управлению воздушным движением, по организации и развитию единой системы авиационно-космического поиска и спасания. Эта система создана в целях организации и проведения поиска и спасания терпящих или потерпевших бедствие воздушных судов всех видов авиации, их пассажиров и экипажей, поиска и эвакуации космонавтов и спускаемых аппаратов с места посадки. В состав единой системы входят органы, службы, авиационные силы и средства поиска и спасания, находящиеся в ведении Федерального агентства воздушного транспорта (Росавиация).
Росавиация через Управление организации авиационно-космического поиска и спасания:
- организует поиск и спасание пассажиров и экипажей воздушных судов, терпящих бедствие, поиск и эвакуацию с места посадки космонавтов и спускаемых космических объектов;
- организует в соответствии с международными договорами Российской Федерации поиск и эвакуацию космонавтов и спускаемых космических объектов, совершивших посадку на территории иностранного государства;
- организует взаимодействие авиационных поисково-спасательных служб с поисково-спасательными службами других федеральных органов исполнительной власти и иностранных государств.
Известна автоматизированная система диспетчерского контроля и управления средствами поисково-спасательного обеспечения спускаемых космических объектов или их аппаратов [5]. Известная автоматизированная система может использоваться в системах диспетчерского контроля, управления средствами поисково-спасательного обеспечения спускаемых космических объектов или их аппаратов, системах посадки, системах управления воздушным движением, системах планирования и контроля использования воздушного пространства, системы сбора, обработки и отображения информации. Автоматизированная система диспетчерского контроля и управления средствами поисково-спасательного обеспечения спускаемых космических объектов или их аппаратов не обеспечивает диспетчеризацию средств спасения при посадке на водную поверхность, то есть отслеживание координат кораблей, задействованных в поисково-спасательной операции и их совместного управления с летательными аппаратами из единого центра управления.
Известна система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов - главный авиационный координационный центр поиска и спасания единой системы авиационно-космического поиска и спасания (ГКЦПС ЕС АКПС) и центр пеленгации летательных аппаратов и космических объектов "Круг-М"[1]. Данные радиолокационной проводки спускаемых космических аппаратов с момента его обнаружения в атмосфере Земли и до нижней границы видимости радиолокационных станций на трассе спуска передаются в ГКЦПС ЕС АКПС, также туда передается информация о работе КВ-средств и координатах спускаемого космического аппарата.
Система контроля и управления в виде ГКЦПС ЕС АКПС не обеспечивает диспетчеризацию средств спасения при посадке на водную поверхность, то есть отслеживание координат кораблей, задействованных в поисково-спасательной операции и их совместного управления с летательными аппаратами из единого центра управления. При посадке спускаемого космического аппарата на водную поверхность поисково-спасательные действия осуществляются авиационными или корабельными силами, а также совместно авиационными и корабельными силами.
Наиболее близкой для обеспечения требований, приведенных выше и соответственно прототипом является автоматизированная система диспетчерского контроля за полетами воздушных судов с возможностью использования информации от системы автоматического зависимого наблюдения [3], представленная на фиг.1 и содержащая локальную вычислительную сеть (1) в которую включены автоматизированные рабочие места (АРМ) группы планирования полетов (2) на базе ПЭВМ, АРМ контроля использования воздушного пространства (3) на базе ПЭВМ, комплекса средств обмена данными с наземным комплексом обработки данных (4), устройства сопряжения с телефонными и телеграфными каналами (5), сервер с базой данных маршрутов полетов и номеров воздушных судов (6), устройство сопряжения (7) и приемник системы автоматического зависимого наблюдения (8), включенные через устройство сопряжения (7) и сервер с базой данных маршрутов полетов и номеров воздушных судов (6).
Недостаток прототипа проявляется при обеспечении поисково-спасательных работ при посадке спускаемого аппарата на водную поверхность. В соответствие с главой XIX инструкции по поисково-спасательному обеспечению полета [1] при посадке спускаемого космического аппарата на водную поверхность поисково-спасательные действия осуществляются авиационными или корабельными силами, а также совместно авиационными и корабельными силами. Известный прототип не может обеспечить одновременный контроль воздушного пространства для летательных и спускаемых космических аппаратов. Также прототип не может обеспечить информативность отображения обстановки для руководства действами сил при поисково-спасательном обеспечении и уменьшении времени для анализа оценки обстановки и принятия решений.
В основу изобретения положена задача сокращение времени поисково-спасательного обеспечение при посадке спускаемых космических аппаратов на водную поверхность и повышение информативности отображения обстановки района проведения поисково-спасательных работ.
Поставленная задача достигается введением в схему прототипа наземных радиолокационных станций (РЛС) (9), приемников бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S» (10), наземного радиолокационного запросчика системы радиочастотного опознавания государственной принадлежности (11), приемников автоматической идентификационной системы (АИС) (12), комплекс средств связи (13), пеленгаторов радиомаяков спускаемых космических аппаратов (14) связанных с локальную вычислительной сетью (1) через устройство сопряжения (7) и АРМ группы планирования судоходства (15) на базе ПЭВМ, АРМ контроля использования водной поверхности (16) на базе ПЭВМ, связанные с локальной вычислительной сетью (1), сервером с базой данных маршрутов полетов и номеров воздушных судов (6) и комплексом обработки данных (4) через локальную вычислительной сетью (1).
На фиг. 2 представлена структурная схема интегрированной автоматизированной система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов.
Рассмотрим функциональное назначение вновь введенных радиотехнических средств:
1. Наземные радиолокационные станции обеспечивают радиолокационное наблюдение за летательными аппаратами (ЛА) на основе принципов первичной радиолокации в частотном диапазоне «S» (полоса частот 2700÷2900 МГц), вторичной радиолокации в частотном диапазоне «S» (запрос на частоте 1030 МГц ответ на частоте 1090 МГц) и за судами, кораблями на основе принципов первичной радиолокации в частотном диапазоне «X» » (полоса частот 8000÷12000 МГц).
2. Приемники бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S» обеспечивает наблюдение за ЛА. Необходимо отметить, что средства запроса бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S», как правило, интегрированы во вторичные или посадочные радиолокаторы. Ответчик УВД/RBS работает в двух частных диапазонах (частоты приема УВД (для стран Содружества Независимых Государств) 837,5 МГц, 1030 МГц; частоты передачи УВД 730 МГц; 740 МГц и частоты приема режимов RBS (установленный Международной организацией гражданской авиации (ИКАО) 1030 МГц, частоты передачи режимов RBS 1090 МГц) в режимах А, С, А/С и S. Ответчик в режиме А передает только четырехзначный код ЛА. Ответчик в режиме С передает барометрическую высоту ЛА по стандартному давлению без коррекции. Как правило используют объединенный режим А/С. Ответчик в режиме А/С передает четырехзначный код ЛА, барометрическую высоту ЛА по стандартному давлению без коррекции. Ответчик в режиме S дополнительно к режиму А/С передает бортовой номер, позывной, заводской номер ответчика, высоту полета ЛА, скорость, координаты ЛА по глобальной навигационной спутниковой системе (ГНСС).
3. Приемники автоматической идентификационной системы (АИС) обеспечивают наблюдение за судами. В целях обеспечения унификации и стандартизации АИС в Международном Регламенте Радиосвязи в целях использования АИС закреплено два канала: АИС-1 - 161,975 МГц и АИС-2 -162,025 МГц, которые должны использоваться повсеместно, за исключением регионов с особым частотным регулированием. Пропускная способность каждого канала до 2000 сообщений в минуту, скорость передачи в канале АИС составляет 9600 бит/с. По каналам АИС передается статическая информация о судне (номер морской подвижной службы (MMSI), номер Международной морской организации (IMO), радиопозывной и название судна или корабля, габариты, тип судна или корабля, данные о месте антенны ГНСС, динамическая информация о судне (местоположение (широта и долгота), время (UTC), время обновления информации, курс истинный (относительно грунта), курсовой угол, скорость истинная, угол крена, угол дифферента, угол килевой качки, угловая скорость поворота, навигационный статус) и рейсовая информация (пункт назначения, время прибытия (ЕТА), осадка судна, информация о грузе (класс/категория груза), количество людей на борту).
4. Наземный радиолокационный запросчик системы радиочастотного опознавания государственной принадлежности «Пароль» (изделие 62) обеспечивает опознавание государственной принадлежности ЛА и кораблей в частотном диапазоне «L».
5. Комплекс средств связи обеспечивает ведение телефонной и теле кодовой радиосвязи должностных лиц находящихся в летательных аппаратах или на кораблях с должностными лицами береговых пунктов управления поисково-спасательного обеспечения полетов спускаемых космических аппаратов, а также с должностными лицами находящихся в других кораблях, и летательных аппаратах. Функционирование средств связи осуществляется в диапазоне частот 30-399 МГц по уставленному шагу сетки частот.
6. Пеленгаторы радиомаяков спускаемых космических аппаратов, обеспечивают прием и пеленгацию сигналов бортового радиомаяка системы КОСПАС-SARSAT спускаемых космических аппаратов осуществляющих передачу в полосе частот 406-406,037 МГц [4], КВ-маяков осуществляющих передачу на частотах 8,364 и 18,060 МГц и УКВ-передатчика осуществляющих передачу на частоте 121,5 МГц.
7. АРМ группы планирования судоходства на базе ПЭВМ обеспечивает отображение информации о надводной обстановке в целях планирования использования водного пространства района проведения поисково-спасательных работ должностными лицами береговых пунктов управления поисково-спасательного обеспечения полетов спускаемых космических аппаратов.
8. АРМ контроля использования водной поверхности на базе ПЭВМ обеспечивает отображение информации о надводной обстановке в целях управления использованием водного пространства района проведения поисково-спасательных работ должностными лицами береговых пунктов управления поисково-спасательного обеспечения полетов спускаемых космических аппаратов.
Предлагаемая интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов работает следующим образом:
Информация о закрытии районов воздушного пространства, где планируется проведение работ по поисково-спасательному обеспечению спускаемых космических аппаратов, для входа в него ЛА совершающих регулярные полеты по трасам, вне трассовые полеты или полеты по извещением, поступает в виде оперативно распространяемыми извещениями об изменениях в правилах проведения и обеспечения полетов и аэронавигационной информации - НОТАМ (англ. NOtice То AirMen (NOTAM) через устройства сопряжения с телефонными и телеграфными каналами (5) поступает на сервер с базой данных маршрутов полетов и номеров воздушных судов (6). Эта информация из базы данных маршрутов полетов и номеров воздушных судов (6) на сервере поступает в комплекс средств обработки данных (4), через локальную сеть (1), где обрабатывается и происходит привязка полученных геодезических координат к району воздушного движения. Поле обработки поступает и отображаются на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную сеть (1).
Информация о изменении режима судоходства и проведении спасательных операций доводится в виде оперативно распространяемыми извещениями НАВТЕКС (англ. NAVigation TEleX (NAVTEX)) устройства сопряжения с телефонными и телеграфными каналами (5) поступает на сервер с базой данных маршрутов полетов и номеров воздушных судов (6). Эта информация из базы данных маршрутов полетов и номеров воздушных судов (6) на сервере поступает в комплекс средств обработки данных (4), через локальную сеть (1), где обрабатывается и происходит привязка полученных геодезических координат к району судовождения и планируемое время проведения спасательной операции. После обработки информация поступает и отображается на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную сеть (1).
Информация от спускаемого космического аппарата, принятая РЛС (9) или пеленгатором радиомаяков спускаемых космических аппаратов (14) через устройство сопряжения (7) поступает на сервер с базой данных маршрутов полетов и номеров воздушных судов (6). Полученная информация из базы данных маршрутов полетов и номеров воздушных судов (6) на сервере поступает в комплекс средств обработки данных (4), через локальную сеть (1), где происходит поиск траектории спуска спускаемого космического аппарата с орбиты и информация о ней.
Обработанная информация из комплекс средств обработки данных (4) совместно с информацией о спускаемом космическом аппарате из базы данных (маршрутов полетов, движения кораблей, судов, спускаемых космических аппаратов, метеоданных), поступает и отображаются на АРМ планирования полетов (2), АРМ контроля использования воздушного (3) через локальную сеть (1).
Информация от ЛА, принятая РЛС (9) или приемником бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S» (10) или приемником системы АЗН (8), наземным радиолокационным запросчиком системы радиочастотного опознавания государственной принадлежности (11), через устройство сопряжения (7) поступает на сервер с базой данных маршрутов полетов и номеров воздушных судов (6). Полученная информация из базы данных маршрутов полетов и номеров воздушных судов (6) на сервере поступает в комплекс средств обработки данных (4), через локальную сеть (1), где происходит поиск маршрута для данного воздушного судна и информации о принадлежности воздушного судна к какому-либо ведомству или организации.
В случае если эта информация присутствует в базе данных маршрутов полетов и номеров воздушных судов (6) на сервере, то она вместе с информацией о воздушном судне, полученной от приемника бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S» (10) или приемником системы АЗН (8), наземным радиолокационным запросчиком системы радиочастотного опознавания государственной принадлежности (11) через устройство сопряжения (7) из комплекса средств обработки данных (4) поступает и отображаются на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную сеть (1).
Если информация о маршруте и принадлежности воздушного судна в базе данных маршрутов полетов и номеров воздушных судов (6) на сервере отсутствует, то из комплекса средств обработки данных (4) на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную сеть (1) поступает предупреждение о нарушении запретов на полет в районе.
Информация от кораблей и судов, принятая РЛС (9) или приемником автоматической идентификационной системы (АИС) (12), наземным радиолокационным запросчиком системы радиочастотного опознавания государственной принадлежности (11), через устройство сопряжения (7) поступает на сервер с базой данных маршрутов полетов и номеров воздушных судов (6). Полученная информация из базы данных маршрутов полетов и номеров воздушных судов (6) на сервере поступает в комплекс средств обработки данных (4), через локальную сеть (1), где происходит поиск номера и маршрута для данного корабля(судна) и информации о его принадлежности к какому-либо ведомству или организации.
В случае если эта информация присутствует в базе данных маршрутов полетов и номеров воздушных судов (6) на сервере, то она вместе с информацией о воздушном судне, полученной от приемника автоматической идентификационной системы (АИС) (12), наземным радиолокационным запросчиком системы радиочастотного опознавания государственной принадлежности (11), через устройство сопряжения (7) из комплекс средств обработки данных (4) поступает и отображаются на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную вычислительную сеть (1).
Если информация о маршруте и принадлежности воздушного судна в базе данных маршрутов полетов и номеров воздушных судов (6) на сервере отсутствует, то из комплекс средств обработки данных (4) на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную вычислительную сеть (1) поступает предупреждение о нарушении запретов на судоходство в районе.
Переданная в локальную вычислительную сеть (1) информация принимается автоматизированными рабочими местами (2, 3, 15, 16) (АРМ), где производится ее отображение, отождествление и совмещение с информацией от других источников, принятой из комплекса обработки данных (4) связанного с локальной вычислительной сетью (1). По результатам обработки полученной информации на АРМ планирования полетов (2), АРМ контроля использования воздушного (3) дополнительно к синтезированной метке Л А формируются синтезированные метки спускаемого космического аппарата, а на АРМ группы планирования судоходства (15) и АРМ контроля использования водной поверхности (16) дополнительно к синтезированной метке судна или корабля формируются синтезированные метки спускаемого космического аппарата и ЛА. Далее совмещенная (интегрированная) информация о координатах, скорости, крене, тангаже, бортовом или идентификационном номере и прочая дополнительная информация спускаемого космического аппарата, ЛА, кораблей, судов отображается на автоматизированных рабочих местах (2, 3, 15, 16). Дополнительно на автоматизированных рабочих местах (2, 3, 15, 16) могут отображаться данные о метеообстановке в районе поисково-спасательного обеспечения полетов спускаемых космических аппаратов.
Сервер базы данных маршрутов полетов и номеров воздушных судов (6) дополнительно хранит данные движения кораблей, судов, спускаемых космических аппаратов и данные о метеобстановке в районе поисково-спасательного обеспечения полетов спускаемых космических аппаратов.
В целях эффективной связи пунктов управления поисково-спасательного обеспечения полетов спускаемых космических аппаратов, ЛА, кораблей их управления, должностные лица автоматизированных рабочих мест (2, 3, 15, 16) используя средства комплекса средств связи (13) через устройства сопряжения (7) могут вести дуплексную телефонную (голосовую связь) и телекодовую радиосвязь с должностными лицами, находящихся в летательных аппаратах или на кораблях, а также должностные лица, находящиеся в летательных аппаратах или на кораблях могут вести радиосвязь с должностными лицами находящимися в других кораблях или летательных аппаратах удерживая в эфире должностных лиц береговых пунктов управления поисково-спасательного обеспечения полетов спускаемых космических аппаратов.
Помимо этого для получения данных о метеобстановке в районе (данных о скорости и сдвиге ветра, осадках) принятые РЛС (9) или в виде сообщений в коде BUFR через устройства сопряжения с телефонными и телеграфными каналами (5) от автономного метеорадиолокатора, через устройство сопряжения (7) поступает на сервер с базой данных маршрутов полетов и номеров воздушных судов (6) связанный с локальной вычислительной сетью (1).Полученная информация из базы данных маршрутов полетов и номеров воздушных судов (6) на сервере поступает в комплекс средств обработки данных (4), через локальную вычислительную сеть (1). Поле обработки метеоданных из комплекса средств обработки данных (4) поступает и отображаются на АРМ планирования полетов (2), АРМ контроля использования воздушного пространства (3) через локальную вычислительную сеть (1).
При штатной посадке спускаемого аппарата производится расстановка по зонам поисковых сил и средств для прикрытия посадочных витков на основном полигоне. Зоны 1, 2, 3 располагаются параллельно трассе спуска. Полеты поисковых самолетов в зонах 1, 3 выполняются от исходного пункта маршрута в направлении, встречном посадочному витку для обеспечения благоприятных условий работы самолетных радиотехнических средств поиска и визуального обнаружения спускаемого аппарата, а в зоне 2 - от исходного пункта маршрута в направлении по посадочному витку.
Предлагаемая интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов с ее взаимосвязанными составными частями, обладает средствами получения данных от ЛА (8, 9, 10), кораблей судов (9, 11, 12), средствами связи с ними (13), средствами отображения надводной (15, 16) и воздушной обстановки (2, 3),что уменьшает время поисково-спасательного обеспечения спускаемых космических аппаратов, повышает информативность отображения обстановки рациона проведения поисково-спасательных работ при одновременном получении информации о воздушной, надводной обстановке и координатах спускаемых космических аппаратов, что соответствует как поставленной задаче, так и требованиям приказа федеральной аэронавигационной службы от 3 апреля 2007 [1], главе V Международной конвенции по охране человеческой жизни на море (СОЛАС-74) [6] и Международным авиационным и морским наставления по поиску и спасанию[7].
Источники информации:
1. Приказ федеральной аэронавигационной службы от 3 апреля 2007 года n 22 «Об утверждении инструкции по поисково-спасательному обеспечению полета международной космической станции с транспортными пилотируемыми кораблями "Союз"»
2. Приложение 12 к конвенции о Международной гражданской авиации: Поиск и спасение. Международная организация гражданской авиации (ИКАО), ISBN 92-9194-364-9,2004 г., стр. 27,
3. Патент 150701 Опубликовано: 20.02.2015 «Автоматизированная система диспетчерского контроля за полетами воздушных судов с возможностью использования информации от системы автоматического зависимого наблюдения»
4. http://oaoniikp.ru/prod2.php?id=71
5. Заявка на полезную модель, 2016100589 от 11.01.2016 «Автоматизированная система диспетчерского контроля и управления средствами поисково-спасательного обеспечения спускаемых космических объектов или их аппаратов».
6. Международная конвенция по охране человеческой жизни на море 1974 года текст, измененный Протоколом 1988 года к ней, с поправками (СОЛАС-74) (с изменениями на 1 января 2016 года) (редакция, действующая с 1 января 2017 года).
7. Международное авиационное и морское наставление по поиску и спасанию, книга 3, ISBN: 978-5-8072-0129-4 ЦНИИМФ, г. Санкт-Петербург, 2016 г - 524 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| КОМПЛЕКС ВЗЛЕТА, ПИЛОТИРОВАНИЯ И ПОСАДКИ АВТОМАТИЗИРОВАННЫХ ВОЗДУШНЫХ СУДОВ | 2006 |
|
RU2376203C2 |
| СИСТЕМА КОНТРОЛЯ И КООРДИНАЦИИ ПОЛЕТОВ АВИАЦИИ | 2016 |
|
RU2648913C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| ИНТЕГРИРОВАННЫЙ УЧЕБНО-ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ РОССИЙСКИХ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2559872C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ ПОЛЕТАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2522774C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ БАЗИРОВАНИЯ, БОЕВОГО ПРИМЕНЕНИЯ И ТРАНСПОРТИРОВКИ ЦЕЛЕВОЙ ВОЕННОЙ ТЕХНИКИ ПРИ ИСПОЛЬЗОВАНИИ С КОРАБЛЕЙ (СУДОВ) | 2014 |
|
RU2605315C2 |


Изобретение относится к системам управления движением в атмосфере Земли летательных аппаратов (ЛА) и кораблей и может быть применено при управлении средствами поисково-спасательного обеспечения спускаемых космических аппаратов (КА). В схему прототипа введены наземные радиолокационные станции, приемник бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S» ЛА, наземный радиолокационный запросчик системы радиочастотного опознавания государственной принадлежности, приемник автоматической идентификационной системы судов, комплекс средств связи, пеленгаторы радиомаяков спускаемых космических аппаратов, автоматизированное рабочее место (АРМ) группы планирования судоходства на базе ПЭВМ, АРМ контроля использования водной поверхности на базе ПЭВМ. Сокращается время поисково-спасательного обеспечения при посадке спускаемых КА на водную поверхность и повышается информативность отображения обстановки района проведения поисково-спасательных работ. 2 ил.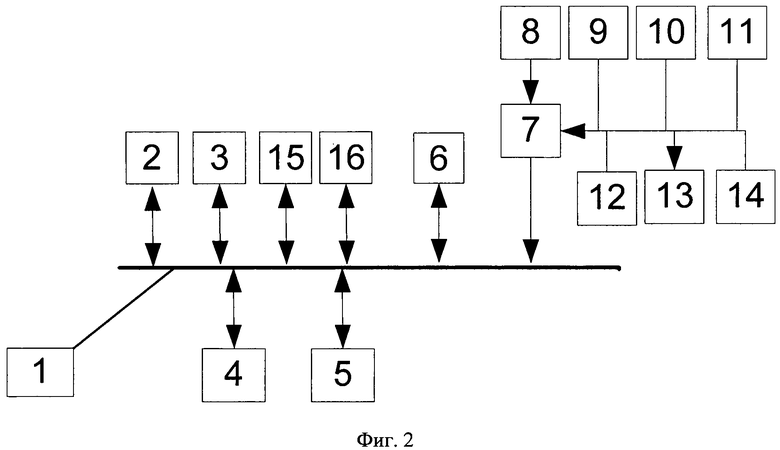
Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов, содержащая связанные между собой локальную вычислительную сеть, автоматизированное рабочее место (АРМ) планирования полетов, АРМ контроля использования воздушного пространства, комплекс средств обмена данными с наземным комплексом обработки данных, устройство сопряжения с телефонными и телеграфными каналами, сервер базы данных маршрутов полетов и номеров воздушных судов, устройство сопряжения и приемник системы автоматического зависимого наблюдения, отличающаяся тем, что введены наземные радиолокационные станции (РЛС), приемник бортовых ответчиков УВД/RBS или УВД/RBS с режимом «S» летательных аппаратов, наземный радиолокационный запросчик системы радиочастотного опознавания государственной принадлежности, приемник автоматической идентификационной системы судов (АИС), комплекс средств связи, пеленгаторы радиомаяков спускаемых космических аппаратов, связанные с устройством сопряжения, АРМ группы планирования судоходства на базе ПЭВМ, АРМ контроля использования водной поверхности на базе ПЭВМ, связанные с локальной вычислительной сетью, сервером с базой данных маршрутов полетов и номеров воздушных судов и комплексом обработки данных через локальную вычислительную сеть, причем информация о спускаемом космическом аппарате, судоходстве и использовании водного пространства, полученная от введенных радиотехнических средств и обработанная в комплексе средств обработки данных через локальную вычислительную сеть, совместно отображается на АРМ планирования полетов и АРМ контроля использования воздушного пространства, соответственно связанных с локальной вычислительной сетью и с соответствующими связями между ними, сервер с базой данных маршрутов полетов преобразован в сервер с базой данных маршрутов полетов и номеров воздушных судов.
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Международная организация гражданской авиации (ИКАО), издание восьмое, июль 2004, 27стр | |||
| Насос | 1917 |
|
SU13A1 |
| МАМПС Руководство по международному авиационному и морскому поиску и спасению, ИКАО, издание шестое, 2013, 522 стр | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

