Решение относится к авиационным комплексам с беспилотными, дистанционно пилотируемыми автоматизированными воздушными судами (ABC) и предназначено для осуществления полетов ABC в соответствии с Воздушным кодексом над территорией с обычным воздушным движением или без него. Решение предназначено для полуавтоматического и автоматического взлета, пилотирования и посадки ABC, несущих полезную нагрузку (ПН) различного назначения. ПН ABC может осуществлять решение прикладных задач для заинтересованных лиц, например фото- и видео мониторинг земной поверхности в видимом, инфракрасном свете или радиосредствами для охраны атомных станций, аэродромов, складов, магистралей, продуктопроводов и решения других задач в режиме реального времени. В качестве ПН могут применяться фото- и видеокамеры, контейнеры с лекарствами, почтовые отправления, доставляемые адресату; средства организации мобильных сетей связи с удаленным объектом; датчики засоренности или задымленности атмосферы и др.
Известен портативный комплекс авианаблюдений и автономнопилотируемый летательный микроаппарат для него, который содержит дистанционно пилотируемый летательный микроаппарат с автономной бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображений, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом [1].
Однако он обладает узкими функциональными возможностями, недостаточной безопасностью и не позволяет проводить полеты над территорией с обычным воздушным движением в соответствии с Воздушным кодексом.
Наиболее близким решением по функциональному назначению и технической сущности относительно заявляемого решения является автоматический беспилотный диагностический комплекс, содержащий дистанционно пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов и радиовысотомер малых высот, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую систему командного радиоуправления, обзорную телевизионную систему, радиоретрансляционную систему, систему обеспечения посадки с устройством торможения основных колес шасси, а также мобильный наземный пункт управления с устройствами связи и контроля,
отличающийся тем, что в его состав введены система диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также введен подключенный к инерциальной навигационной системе и приемной аппаратуре спутниковой навигационной системы вычислитель действительных координат, причем вычислитель действительных координат и первый вход-выход блока управления системой диагностики подключены к блоку управления бортовыми системами, второй вход-выход блока управления системой диагностики подключен к системе диагностики состояния газопровода, а третий вход-выход связан с системой командного радиоуправления.
Однако он также обладает узкими функциональными возможностями, недостаточной безопасностью, не позволяет проводить полеты над территорией с обычным воздушным движением в соответствии с Воздушным кодексом. Его нельзя применять во всех зонах, аэродромах и аэропортах из-за отсутствия в нем средств управления воздушным движением (УВД), речевой связи с командирами конфликтующих воздушных судов и авиадиспетчерами, а также опознавания «свой-чужой»; комплекс «привязан» к месту базирования мобильного наземного пульта управления и, следовательно, имеет ограниченные возможности по снабжению разнообразных потребителей результатами деятельности бортовой полезной нагрузки; комплекс не может обслуживать большую территорию, поскольку не имеет гибких, интеллектуальных средств передачи полезной информации, навигационной информации, пилотажной информации и эксплуатационной информации; зона полетов привязана к месту базирования мобильного наземного пульта управления, а также и к месту взлета-посадки, поскольку комплекс не имеет необходимого количества аэродромов базирования; комплекс имеет недостаточную гибкость применения, поскольку не имеет средств предполетного ввода полетных заданий, навигационных данных и наборов стандартных пилотажных маневров; комплекс имеет недостаточную безопасность, поскольку не имеет средств пеленгования конфликтующих воздушных судов без систем связи и не защищен, таким образом, от столкновений в воздухе.
Задачей изобретения является создание такого комплекса взлета пилотирования и посадки автоматизированных воздушных судов, который позволяет использовать традиционные по своей сути дистанционно пилотируемого летательного аппарата [ДПЛА (ABC)] во всех зонах, аэродромах и аэропортах оборудованных средствами УВД, ретранслировать служебную информацию не только командиру ABC, но и на борт других судов и авиадиспетчерам в едином информационном поле, передавать изображение подстилающей поверхности зоны полета и другие данные с ботовой полезной нагрузки на пульты дистанционного управления полезной нагрузкой (ПДУ-ПН), которые могут находиться в расположении экологов, рыбаков, пожарных, топографов и т.д., обнаруживать конфликтующие воздушные суда и в автоматическом и полуавтоматическом режимах выходить в упреждающую точку выхода из конфликта, используя средства опознавания "свой-чужой», определять принадлежность других воздушных судов, совершать предполетную подготовку ABC на своих аэродромах к полетам в необходимых районах. При этом в среде данного комплекса могут летать ABC любого аэродинамического типа, имеющие силовые установки любого типа: автоматизированные самолеты, автоматизированные вертолеты, автоматизированные автожиры, автоматизированные дирижабли и т.д.
Таким образом, конкретно задачей изобретения является следующее.
1. Повышение безопасности и выполнение полетов над территорией с обычным воздушным движением в соответствии с Воздушным кодексом.
2. Расширение функциональных возможностей.
3. Обслуживание большей территории полетов автоматизированных воздушных судов.
4. Расширение возможностей по снабжению разнообразных потребителей результатами деятельности бортовой полезной нагрузки.
5. Повышение мобильности комплекса и гибкости его применения.
Техническим результатом является создание более безопасного комплекса бортовых и наземных средств управления ABC, вписывающихся во все зоны, аэропорты и аэродромы, оборудованные средствами УВД, обладающего широкими возможностями адаптации к условиям полета, особенностям зон полетов и складывающейся конфликтной обстановки для эксплуатации ABC на большей территории полетов в полном соответствии с требованиями Воздушного кодекса и международных стандартов для воздушных судов, расширение возможностей по снабжению разнообразных потребителей результатами деятельности бортовой полезной нагрузки, повышение мобильности комплекса и гибкости его применения.
Предложен комплекс взлета, пилотирования и посадки автоматизированных воздушных судов, включающий один или несколько пультов дистанционного управления командира, один или несколько аэродромов и один или несколько пультов дистанционного управления полезной нагрузкой, причем все они объединяются единым информационным полем, в котором также могут появляться конфликтующие воздушные суда без системы связи и конфликтующие воздушные суда, оснащенные системами связи, а также может присутствовать авиадиспетчерская служба с системой связи авиадиспетчерской службы, бортовое радиоэлектронное оборудование, сенсоры (магнитный компас, система воздушных сигналов, датчики угловых скоростей, датчики вертикали, координатные акселерометры, датчики температуры двигателя, измерители параметров бортовой сети и другие датчики), навигационный вычислитель с режимами УВД, навигация, посадка, самоконтроль, полезную нагрузку, высотомер малых высот, приемник спутниковой навигационной системы (GPS-приемник), накопитель информации,
характеризующийся тем, что в него введено по меньшей мере одно дистанционно-пилотируемое автоматизированное воздушное судно.
Комплекс характеризуется тем, что в автоматизированное воздушное судно введены:
автопилот,
следящие приводы (сервоприводы),
радиовысотомер, доплеровский измеритель скорости и угла сноса корелляционно экстремальные координаторы, глиссадные приборы,
система предупреждения столкновения и опознавания "Свой-чужой",
бортовой информационный шлюз,
накопитель информации,
система связи бортовая, включающая
аппаратуру управления воздушным движением (бортовая часть),
интеллектуальную линию связи,
систему связи голосовую (бортовая часть),
поисково-спасательную систему (бортовая часть) и
систему пеленгации (бортовая часть).
Комплекс характеризуется тем, что в пульт дистанционного управления командира автоматизированного воздушного судна введены:
система связи командира, содержащая
аппаратуру управления воздушным движением,
интеллектуальную линию связи,
систему связи голосовую,
поисково-спасательную систему (командирская часть) и
систему пеленгации, а также
информационный шлюз,
накопитель информации и
автоматизированное рабочее место командира автоматизированного воздушного судна, содержащее
компьютер,
блок автоматизации взлета, полета и посадки автоматизированного воздушного судна,
авторизатор,
интерфейс машина-человек,
органы управления и
индикатор.
Комплекс характеризуется тем, что в пульт дистанционного управления полезной нагрузкой введены:
система связи с бортовой полезной нагрузкой, содержащая
интеллектуальную линию связи, а также
информационный шлюз,
накопитель информации и
автоматизированное рабочее место оператора полезной нагрузки, содержащее
компьютер,
блок управления полезной нагрузкой,
авторизатор,
интерфейс машина-человек,
органы управления и
индикатор.
Комплекс характеризуется тем, что в аэродром введены:
система связи взлетно-посадочной территории, включающая
аппаратуру управления воздушным движением (наземная часть),
интеллектуальную линию связи,
систему связи голосовую (наземная часть),
поисково-спасательную систему (наземная часть) и
систему пеленгации (наземная часть), а также
информационный шлюз,
накопитель информации и
оборудование аэродрома, включающее
аппаратуру подготовки к старту автоматизированного воздушного судна,
сервер с базой данных о зонах выполнения полетных заданий и знаний о типовых маневрах ABC около заданных поворотных пунктов маршрута и
взлетно-посадочное оборудование (для руления и глиссады).
Изобретение иллюстрируется фиг.1-7, где изображены:
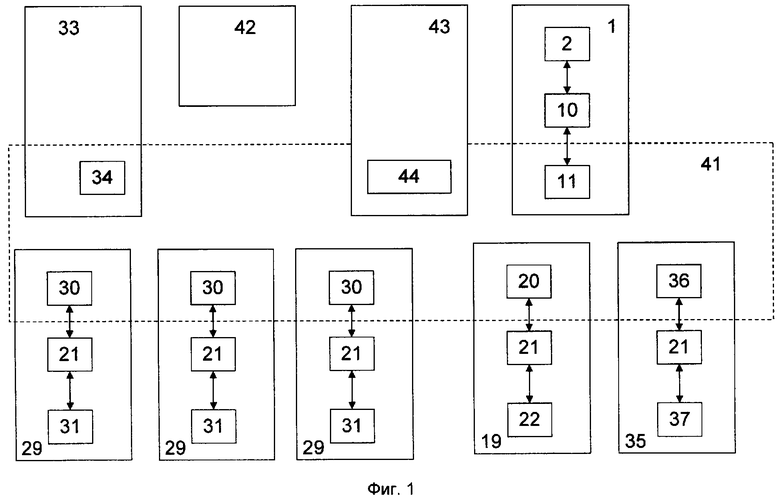
на фиг.1 - комплекс взлета, пилотирования и посадки автоматизированных воздушных судов;
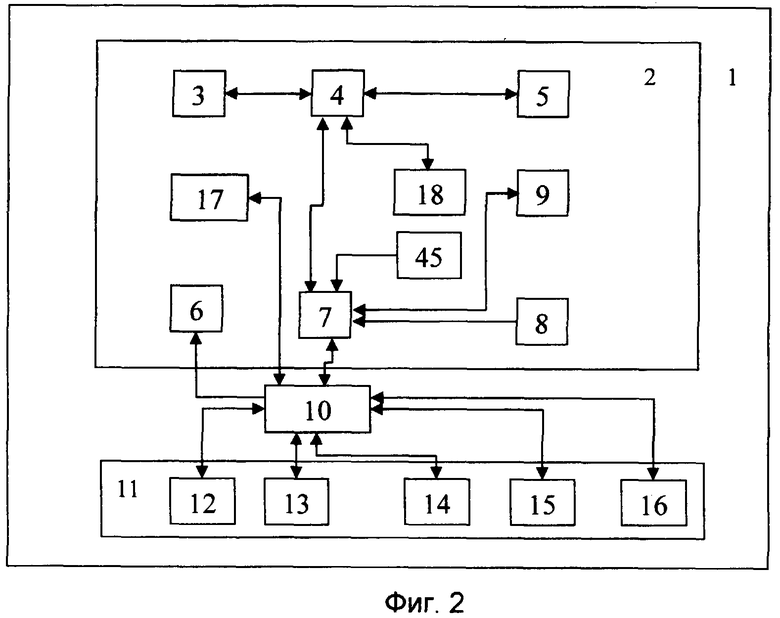
на фиг.2 - автоматизированное воздушное судно (ABC) 1;
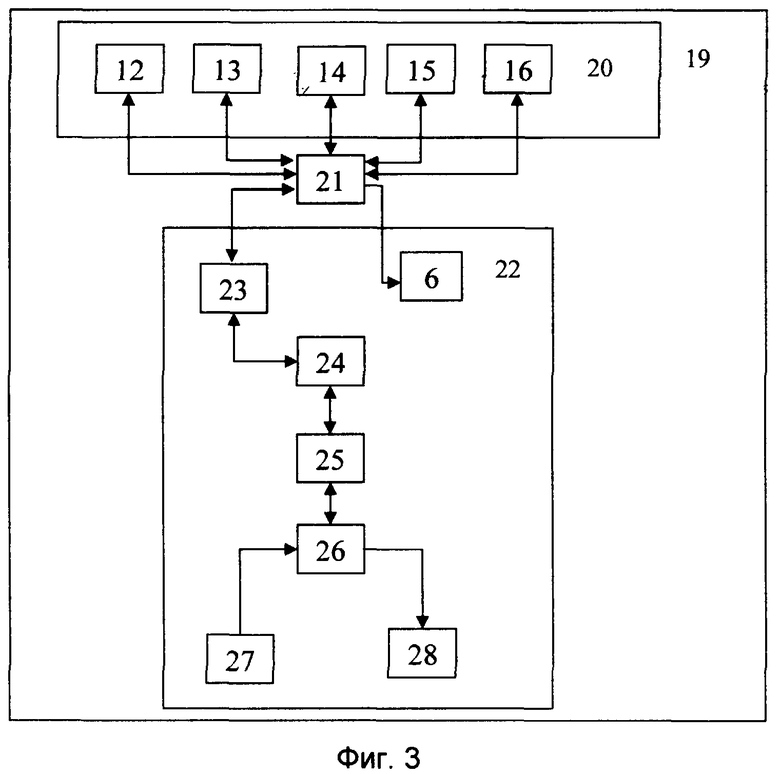
на фиг.3 - пульт дистанционного управления командира ABC (ПДУ-К) 19;
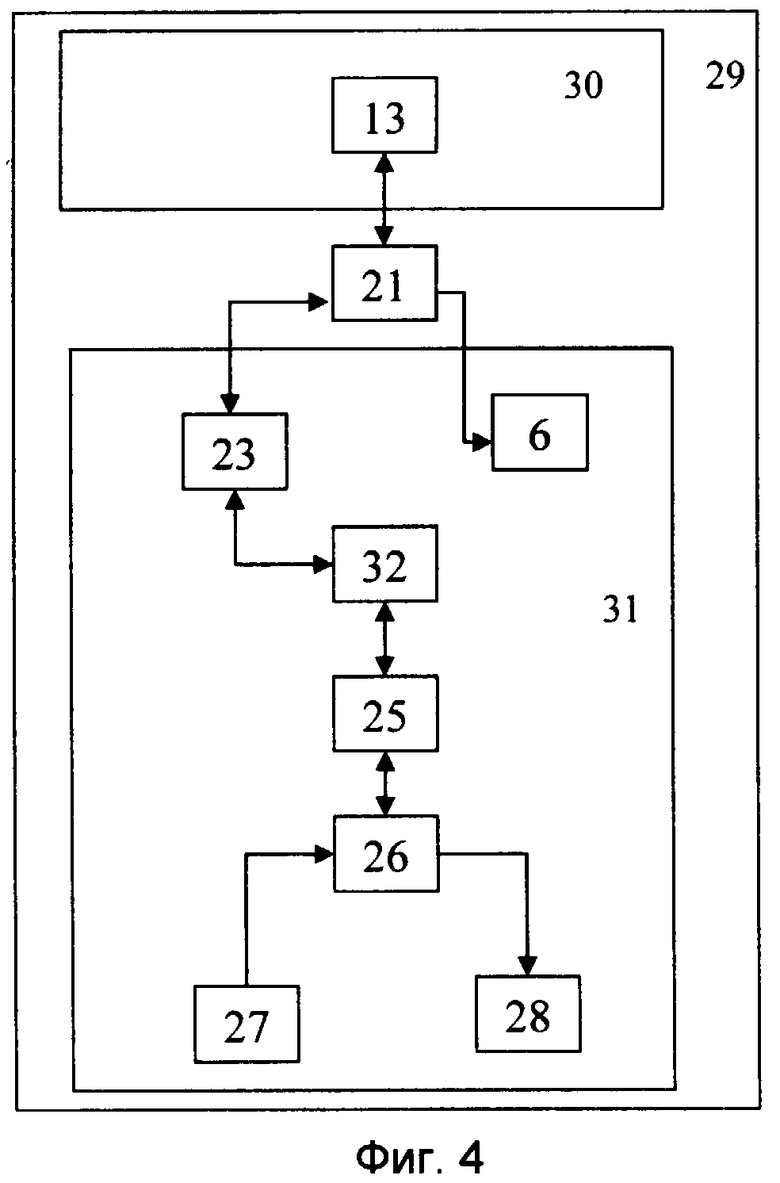
на фиг.4 - пульт дистанционного управления полезной нагрузкой (ПДУ-ПН) 29;
на фиг.5 - конфликтующее воздушное судно 33, оснащенное системой связи конфликтующего воздушного судна 34;
на фиг.6 - аэродром и
на фиг.7 - авиадиспетчерская служба,
и где обозначено:
1 - автоматизированное воздушное судно (ABC);
2 - бортовое радиоэлектронное оборудование (БРЭО);
3 - сенсоры (магнитный компас, система воздушных сигналов, датчики угловых скоростей, датчики вертикали, координатные акселерометры, датчики температуры двигателя, измерители параметров бортовой сети и другие датчики);
4 - автопилот;
5 - следящие приводы (сервоприводы);
6 - накопитель информации;
7 - навигационный вычислитель с режимами УВД, навигация, посадка, самоконтроль;
8 - радиовысотомер, доплеровский измеритель скорости и угла сноса корреляционно экстремальные (ДИСС, КЭ) координаторы, глиссадные приборы;
9 - система предупреждения столкновения и опознавания "Свой-чужой";
10 - бортовой информационный шлюз;
11 - система связи бортовая;
12 - аппаратура УВД (бортовая и наземные части);
13 - интеллектуальная линия связи;
14 - система связи голосовая (бортовая и наземные части);
15 - поисково-спасательная система (бортовая, наземная и командирская части);
16 - система пеленгации (бортовая и наземные части);
17 - полезная нагрузка;
18 - высотомер малых высот;
19 - пульт дистанционного управления командира ABC (ПДУ-К);
20 - система связи командира ABC;
21 - информационный шлюз;
22 - автоматизированное рабочее место командира ABC (APM-K);
23 - компьютер;
24 - блок автоматизации взлета, полета и посадки ABC;
25 - авторизатор;
26 - интерфейс машина-человек;
27 - органы управления;
28 - индикатор;
29 - пульт дистанционного управления полезной нагрузкой (ПДУ-ПН);
30 - система связи с бортовой полезной нагрузкой;
31 - автоматизированное рабочее место оператора полезной нагрузки (АРМ-ПН);
32 - блок управления полезной нагрузкой;
33 - конфликтующее воздушное судно, оснащенное системой 34;
34 - система связи конфликтующего воздушного судна;
35 - аэродром;
36 - система связи взлетно-посадочной территории;
37 - оборудование аэродрома;
38 - аппаратура подготовки к старту ABC;
39 - сервер с базой данных о зонах выполнения полетных заданий и знаний о типовых маневрах ABC около заданных поворотных пунктов маршрута (ППМ);
40 - взлетно-посадочное оборудование (для руления и глиссады);
41 - единое информационное поле;
42 - конфликтующее воздушное судно без системы связи;
43 - авиадиспетчерская служба;
44 - система связи авиадиспетчерской службы;
45 - приемник спутниковой навигационной системы (GPS-приемник).
Предложен (фиг.1) комплекс взлета, пилотирования и посадки автоматизированных воздушных судов (КВПП ABC), включающий по меньшей мере одно дистанционно-пилотируемое автоматизированное воздушное судно (ABC) 1, один или несколько пультов дистанционного управления командира ABC (ПДУ-К) 19, один или несколько аэродромов 35 и один или несколько пультов дистанционного управления полезной нагрузкой (ПДУ-ПН) 29, причем все они объединяются единым информационным полем 41, в котором также могут появляться конфликтующие воздушные суда без системы связи 42 и конфликтующие воздушные суда 33, оснащенные системами связи 34, а также может присутствовать авиадиспетчерская служба 43 с системой связи авиадиспетчерской службы 44.
Взаимодействие составляющих комплекса представлено на фиг.1, где все участники (1, 33, 19, 29,35 и 43) общаются друг с другом посредством систем связи (11, 34, 20, 30, 36 и 44), размещенных в едином информационном поле 41. Причем 19 и 35 могут располагаться как на одной территории, так и в разных местах, хотя и не сильно удаленных друг от друга, а 29 расположены в соответствующих зонах по интересам (лесники, пожарные, экологи, рыбаки, и т.д.).
Информационный шлюз (10 - бортовой; 21 - обычный): средство сбора информации с различных источников, временного хранения, преобразования в стандартизованные пакеты информации и передачи через Интеллектуальную сетевую линию связи 13 потребителям, а также на накопитель информации 6.
Интеллектуальная сетевая линия связи 13 (ИСЛС) предназначена для временного хранения и передачи адресатам стандартизованных пакетов информации через коммутируемые и выделенные каналы связи (радиоканалы различных диапазонов, оптические и пр. каналы, Интернет, эзернет, оптоволокно, спутниковые, радиорелейные и специально созданные системой каналы связи). При этом ИСЛС замеряет дееспособность каналов, задержки пакетов сообщений, о повышении надежности передачи сообщений потребителю и сообщает потребителям время получения, время передачи и ожидаемую задержку в выбранном для передачи канале связи.
Системы связи (11, 14, 20, 30, 34, 36) укомплектованы необходимыми компонентами для выполнения обмена информацией по каналам связи.
В состав ABC 1 входят (фиг.2):
- планер с двигателем и топливной системой;
- бортовое радиоэлектронное оборудование 2 (БРЭО);
- бортовой информационный шлюз 10;
- система связи бортовая 11.
В состав БРЭО 2 входят:
- сенсоры 3;
- автопилот 4;
- следящие приводы (сервоприводы) 5;
- накопитель информации 6;
- навигационный вычислитель с режимами УВД навигация, посадка, самоконтроль 7;
- радиовысотомер, ДИСС, КЭ координаторы, глиссадные приборы 8;
- система предупреждения столкновения и опознавания "свой-чужой" 9;
- полезная нагрузка (TV камеры, ИК камеры, газоанализаторы, бортовые радиолокаторы и др.) 17;
- высотомер малых высот 18 и
- приемник спутниковой навигационной системы (GPS-приемник) 45.
В состав системы связи бортовой 11 входят:
- аппаратура УВД (бортовая часть) 12;
- интеллектуальная сетевая линия связи 13;
- система связи голосовая (бортовая часть) 14;
- поисково-спасательная система (бортовая часть) 15;
- система пеленгации (бортовая часть) 16.
В состав ПДУ-К 19 входят (фиг.3):
- система связи командира ABC 20;
- информационный шлюз 21;
- автоматизированное рабочее место командира ABC (APM-K) 22.
В состав системы связи командира ABC 20 входят:
- интеллектуальная сетевая линия связи 13 (наземная часть);
- система связи голосовая 14;
- поисково-спасательная система (командирская часть);
- система пеленгации 16.
В состав APM-K 22 входят:
- накопитель информации 6;
- компьютер 23;
- блок автоматизации взлета, полета и посадки ABC 24;
- авторизатор 25;
- интерфейс машина-человек 26;
- органы управления 27;
- индикатор 28.
В состав ПДУ-ПН 29 входят (фиг.4):
- система связи с ПН 30;
- информационный шлюз 21;
- автоматизированное рабочее место оператора ПН (АРМ-ПН) 31;
Система связи 30 содержит интеллектуальную сетевую линию связи 13.
В состав автоматизированного рабочего места оператора полезной нагрузки (АРМ-ПН) 31 входят:
- накопитель информации 6;
- компьютер 23;
- блок управления ПН 32;
- авторизатор 25;
- интерфейс машина-человек 26;
- органы управления 27;
- индикатор 28.
В состав конфликтующего воздушного судна 33, оснащенного системой связи конфликтующего воздушного судна (фиг.5), входит система связи конфликтующего воздушного судна 34. В состав 34 входят система связи голосовая (бортовая часть) 14, аппаратура УВД 12 и система предупреждения столкновений и опознавания "свой-чужой" 9.
В состав аэродрома 35 входят (фиг.6):
- система связи взлетно-посадочной территории 36;
- информационный шлюз 21;
- оборудование аэродрома 37.
В систему связи взлетно-посадочной территории 36 входят:
- аппаратура УВД 12;
- интеллектуальная линия связи 13;
- система связи голосовая 14;
- поисково-спасательная система 15;
- система пеленгации 16.
В состав оборудования аэродрома 37 входят:
- накопитель информации 6;
- аппаратура подготовки к старту ABC 38;
- сервер с базой данных о зонах выполнения полетных заданий и знаний о типовых маневрах ABC около заданных поворотных пунктов маршрута (ППМ) 39;
- взлетно-посадочное оборудование (для руления и глиссады) 40.
В состав авиадиспетчерской службы 43 входят (фиг.7):
- система связи авиадиспетчерской службы 44.
В состав системы связи авиадиспетчерской службы 44 входят:
- аппаратура УВД 12;
- система связи голосовая 14;
- система пеленгации 16.
Связь между 1, 19, 29 и 35 осуществляется по 13. 14 служит для связи между 19, 1, 35 и 33. 19 совместно с 35 осуществляет подготовку, предполетную проверку и взлет 1. Командир 1 перед взлетом осуществляет ввод программ полета с помощью 24 и может осуществлять перепрограммирование и вмешиваться непосредственно в процесс управления с помощью 27. 6 осуществляет накопление информации на борту 1, на 19 и 29 и на 35. Эта информация используется для анализа полетов, учета действий 1, командира 1, оператора 17 и служб 35. Посредством интеллектуальной сетевой линии связи 13 командир вводит маршрут полета на борт воздушного судна 1, где через информационный шлюз 10 попадает в навигационный вычислитель 7.
На аэродроме 35 работает аппаратура УВД 12 и система пеленгации 16, обеспечивающие командира 1 и БРЭО 2 информацией о взаимном положении 1 и 35.
Сервер с базой данных и знаний 39 по каналам командира 1 при подготовке к полету 1 может вводить в БРЭО 2 полетное задание, а также те изменения в маршрут, которые потребуется внести.
Взлетно-посадочное оборудование 40 обеспечивает автоматическую, автоматизированную или ручную посадку 1.
Авиадиспетчерская служба 43 наблюдает полет ABC 1, выдает командиру ABC эшелон полета, дает указания по управлению воздушным движением и предупреждению столкновений, по взлету и посадке на аэродромах общего пользования.
Решение имеет следующие преимущества.
1. В прототипе и аналогах речь идет о ДПЛА. В рассматриваемом решении применяются автоматизированные воздушные суда полностью соответствующие требованиям Воздушного кодекса и международных стандартов для воздушных судов. При этом командир имеет возможность контролировать все необходимые параметры полета, общаться с авиадиспетчерами и пилотами конфликтующих воздушных судов, аэродромами.
2. ABC 1 оборудовано всеми устройствами управления воздушным движением (УВД) 12; ABC 1 видно в воздушном пространстве всеми существующими аппаратными средствами наблюдения воздушных судов. Указанные свойства позволяют использовать ABC 1 во всех зонах, аэродромах, в обычных аэродромах, на линиях полетов и т.д.
3. ABC 1 имеют на борту системы связи, что позволяет ретранслировать навигационную, пилотажную, эксплуатационную и служебную информацию командиру ABC 1, оператору 17, с борта 1 на борт других воздушных судов, авиадиспетчерам 43 и потребителям в едином информационном поле 41.
4. ПДУ-К 19 и ПДУ-ПН 29 могут находиться экстерриториально относительно зоны полетов ABC 1. ПДУ-ПН 29 может, например, находиться в расположении экологов, рыбаков, топографов, пожарных, подавать им изображение подстилающей поверхности зоны полета ABC 1 на их средства наблюдения 28 данные полезной нагрузки, координаты (долготу и широту) на карте местности и пр.
5. ABC 1 имеет средства наблюдения воздушного пространства, обнаруживает конфликтующие воздушные суда, имеет средства предупреждения столкновений и может в автоматическом и полуавтоматическом режимах выходить в упрежденную точку выхода из конфликта. При этом командир ABC 1 со своего ПДУ-К 19 может голосом по голосовой системе связи 14 общаться с пилотом (если он есть) конфликтующего воздушного судна или авиадиспетчером УВД.
6. ABC 1 имеет средства опознавания "свой-чужой", что также повышает безопасность применения ABC.
Источники информации
1. RU 2232104 С1, 2004.
2. RU 2200900 С2, 2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| АВТОМАТИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ МЕТЕОРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АЭРОДРОМА И ВВОДА ИХ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2012 |
|
RU2519622C2 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Авиационный комплекс с БЛА | 2019 |
|
RU2735483C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| СПОСОБ ИЗМЕНЕНИЯ РЕЖИМА ПОЛЕТА ВОЗДУШНОГО СУДНА В ЗАПРЕТНОЙ ЗОНЕ | 2010 |
|
RU2445579C2 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Способ обеспечения воздушных судов метеорологической информацией | 2017 |
|
RU2672040C2 |

Изобретение относится к авиационным комплексам с беспилотными, дистанционно пилотируемыми автоматизированными воздушными судами (АВС) и предназначено для полуавтоматического и автоматического взлета, пилотирования и посадки АВС, несущих полезную нагрузку различного назначения. В состав комплекса, помимо АВС, входят один или несколько пультов дистанционного управления командира, один или несколько аэродромов и один или несколько пультов дистанционного управления полезной нагрузкой, причем все они объединяются единым информационным полем. Может присутствовать авиадиспетчерская служба с системой связи, включающей аппаратуру управления воздушным движением. В качестве полезной нагрузки могут применяться фото- и видеокамеры, контейнеры с лекарствами, почтовые отправления, доставляемые адресату; средства организации мобильных сетей связи с удаленным объектом; датчики засоренности или задымленности атмосферы и др. Предложенный комплекс характеризуется расширенными функциональными возможностями и позволяет, в частности, использовать традиционные АВС во всех зонах, аэродромах и аэропортах оборудованных средствами управления воздушным движением, ретранслировать служебную информацию не только командиру АВС, но и на борт других судов и авиадиспетчерам, передавать изображение подстилающей поверхности зоны полета и другие данные с бортовой полезной нагрузки на пульты дистанционного управления полезной нагрузкой, обнаруживать конфликтующие воздушные суда и в автоматическом и полуавтоматическом режимах выходить в упреждающую точку выхода из конфликта, совершать предполетную подготовку АВС на своих аэродромах к полетам в необходимых районах. 7 ил.
Комплекс взлета, пилотирования и посадки автоматизированных воздушных судов, включающий один или несколько пультов дистанционного управления командира, один или несколько аэродромов и один или несколько пультов дистанционного управления полезной нагрузкой, причем все они объединяются единым информационным полем, в котором также могут появляться конфликтующие воздушные суда без системы связи и конфликтующие воздушные суда, оснащенные системами связи, включающими систему предупреждения столкновения и опознавания «свой-чужой», аппаратуру управления воздушным движением и систему связи голосовую, а также может присутствовать авиадиспетчерская служба с системой связи авиадиспетчерской службы, включающей аппаратуру управления воздушным движением, систему связи голосовую и систему пеленгации, бортовое радиоэлектронное оборудование, сенсоры (магнитный компас, систему воздушных сигналов, датчики угловых скоростей, датчики вертикали, координатные акселерометры, датчики температуры двигателя, измерители параметров бортовой сети и другие датчики), навигационный вычислитель с режимами управления воздушным движением, навигации, посадки, самоконтроля, полезную нагрузку, высотомер малых высот, приемник спутниковой навигационной системы (GPS-приемник), накопитель информации, отличающийся тем, что в него введено по меньшей мере одно дистанционно-пилотируемое автоматизированное воздушное судно, куда введены
автопилот,
следящие приводы (сервоприводы),
радиовысотомер, доплеровский измеритель скорости и угла сноса,
корелляционно-экстремальные координаторы, глиссадные приборы,
система предупреждения столкновения и опознавания "свой-чужой",
бортовой информационный шлюз,
накопитель информации,
система связи бортовая, включающая
аппаратуру управления воздушным движением (бортовая часть),
интеллектуальную линию связи,
систему связи голосовую (бортовая часть),
поисково-спасательную систему (бортовая часть) и
систему пеленгации (бортовая часть),
в пульт дистанционного управления командира автоматизированного воздушного судна введены
система связи командира, содержащая
аппаратуру управления воздушным движением,
интеллектуальную линию связи,
систему связи голосовую,
поисково-спасательную систему (командирская часть) и
систему пеленгации, а также
информационный шлюз, накопитель информации и
автоматизированное рабочее место командира автоматизированного воздушного судна, содержащее
компьютер,
блок автоматизации взлета, полета и посадки автоматизированного воздушного судна,
авторизатор,
интерфейс,
органы управления и
индикатор,
в пульт дистанционного управления полезной нагрузкой введены
система связи с бортовой полезной нагрузкой, содержащая
интеллектуальную линию связи, а также
информационный шлюз,
накопитель информации и
автоматизированное рабочее место оператора полезной нагрузки, содержащее
компьютер,
блок управления полезной нагрузкой,
авторизатор,
интерфейс,
органы управления и
индикатор,
в автоматизированный аэродром введены
система связи взлетно-посадочной территории, включающая
аппаратуру управления воздушным движением (наземная часть),
интеллектуальную линию связи,
систему связи голосовую (наземная часть),
поисково-спасательную систему (наземная часть) и
систему пеленгации (наземная часть), а также
информационный шлюз,
накопитель информации и
оборудование аэродрома, включающее
аппаратуру подготовки к старту автоматизированного воздушного судна,
сервер с базой данных о зонах выполнения полетных заданий и знаний о типовых маневрах автоматизированного воздушного судна около заданных поворотных пунктов маршрута, и
взлетно-посадочное оборудование (для руления и глиссады), причем
дистанционно пилотируемые автоматизированные воздушные суда осуществляют полеты в соответствии с Воздушным кодексом над территорией с обычным воздушным движением или без него, используют для взлета и посадки аэродромы общего пользования или автоматизированные аэродромы,
пульты дистанционного управления командиров автоматизированных воздушных судов предоставляют всю навигационную, пилотажную и эксплуатационную информацию, необходимую для управления в режимах взлета, пилотирования и посадки автоматизированными воздушными судами,
пульты дистанционного управления полезной нагрузкой, установленной на автоматизированных воздушных судах, выполнены с возможностью обмена полезной информацией.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| RU 2002114606 A, 27.05.2004. | |||

