Изобретение относится к радиолокации поверхности Земли с летательных аппаратов и может быть использовано для формирования яркостных изображений поверхности Земли из космоса с определением координат движущихся малоразмерных отражателей (кораблей в океанских акваториях) с измерением, что особенно важно, обеих составляющих их скорости - радиальной и тангенциальной. Радиальное направление скорости Vy строго-перпендикулярно траектории аппарата, тангенциальное Vx - параллельно траектории при боковом радиолокационном обзоре местности. Различные алгоритмы обработки широкополосного сигнала, принятого антенной радиолокатора с синтезированной апертурой (РСА), в принципе обеспечивают не только высокое пространственное разрешение по обеим осям, но и возможность раздельного формирования яркостного и скоростного радиолокационных изображений (РЛИ). Известные нам публикации и патенты, где тем или иным способом измеряется скорость малоразмерного отражателя, используют однолучевые РСА.
Известные способы измерения скорости корабля
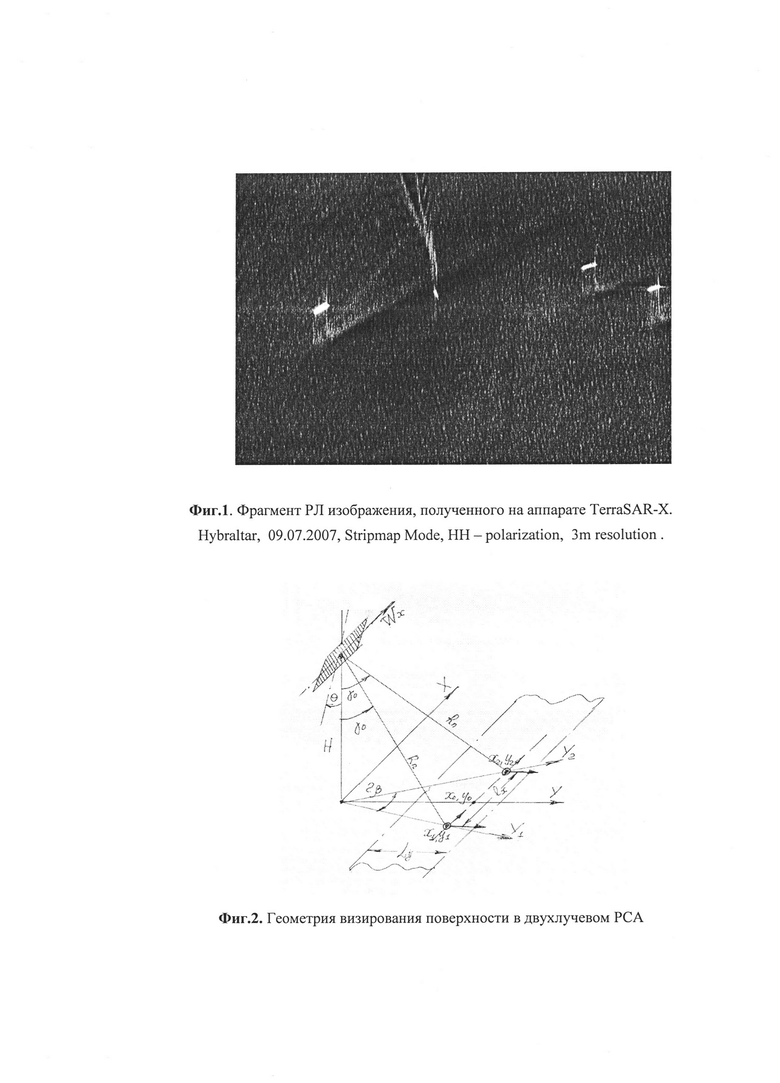
Известен способ измерения радиальной скорости корабля по тангенциальному сдвигу его яркостной отметки относительно кильватерного следа. На фиг. 1 приведено изображение морской поверхности (Гибралтарский пролив) в присутствии движущихся кораблей, полученное с современного космического аппарата TerraSAR-X.
Корабли, движущиеся на юго-запад, смещаются относительно своего кильватерного следа к северу - по оси траектории аппарата, называемой азимутальной осью (х). Движущийся на юг корабль не смещается относительно своего следа. Поскольку курс корабля в данном случае можно определить по форме его асимметричной отметки (что возможно благодаря соответствующему разрешению РСА по обеим осям), а радиальная составляющая скорости Vy вычисляется по азимутальному сдвигу отметки xv, .то по изображению фиг. 1 определяются обе составляющие скорости - но только для тех кораблей, которые движутся не точно по азимутальной оси:
 , Vx=Vyctgα,
, Vx=Vyctgα,
где Н, Wx - высота траектории и скорость аппарата, γn - угол визирования отметки (относительно вертикали к траектории аппарата), α - курс корабля относительно траектории аппарата.
В работе [1] предлагается способ обработки с формированием изображения в координатах «азимут-скорость», позволяющий определять траекторию локального отражателя - но только при огромных значениях скорости, достаточных для смещения отражателя на сотни элементов разрешения за время синтезирования. Известны и способы обработки сигналов в РСА, позволяющие измерять малые радиальные скорости океанских течений по смещению медианы доплеровского спектра [2, 3]. На аппарате TerraSAR-X используется интерференционный способ измерения скорости (ИРСА с продольной антенной базой) для формирования скоростных портретов движущихся с малыми скоростями малоразмерных объектов [4] - но опять-таки для радиальной составляющей скорости. В отечественных публикациях [5, 6] рассматривались близкие к указанным алгоритмы обработки сигналов в ИРСА.
Имеется большое количество патентов, предлагающих различные способы измерения скорости локальных наземных отражателей в аэрокосмических РСА. Наиболее близкими к предлагаемому здесь способу являются патенты [7-10]. В патенте [7] (Joao Moreira and Wolfgang Keydel, 1996) предлагается способ, использующий «когерентную одно- или многоканальную систему вдоль-траекторного отображения» движущихся целей. Радиальная скорость отражателя определяется по доплеровскому сдвигу частоты отраженного сигнала с учетом азимутального отклонения цели от траверса, при формируемой с самолета достаточно широкой азимутальной диаграммы направленности с образованием нескольких субапертурных (синтезированных) диаграмм.
В патенте [8] (Takashi Fujimura, 1999) предлагается интерференционный способ измерения радиальной скорости цели в РСА, использующий два последовательно-формируемых комплексных изображения с последующей разностно-фазовой обработкой, а в нашем патенте [9] (Переслегин С.В. и др., 2013) - тот же интерференционный способ измерения скорости, но с использованием иного (разностно-частотного) алгоритма апертурного синтеза, позволяющего избавиться от азимутального сдвига отметки движущегося отражателя. Наконец, в патенте [10] (Martin Kirscht, 2005) предлагается «метод обнаружения движущихся объектов, определения их скорости и местоположения в РСА-изображениях», позволяющий, в отличие от патентов [7-9], измерять обе составляющие вектора скорости. Здесь используются, как и в патенте [8], два РСА-изображения, производится спектральный анализ сигналов в каждой из площадок формируемых изображений, по различию частотных спектров целей и спектров стационарной поверхности выделяются движущиеся цели и определяются их векторные скорости с учетом задержки между формируемыми изображениями. Именно патент [10] следует принять за прототип предлагаемого в данной заявке «Способа формирования изображения морской поверхности с отображением вектора скорости корабля в космическом радиолокаторе с синтезированной апертурой (РСА)».
Предлагаемый способ измерения скорости корабля
В данной заявке предлагается способ, позволяющий измерять обе составляющие скорости локального отражателя и его местоположение при использовании двух яркостных изображений, полученных в двух независимо сфокусированных лучах антенны космического РСА, не прибегая к спектральному анализу сигналов или использованию фазовых сдвигов. Отличие от прототипа [10] и сама возможность реализации способа определяются двумя главными факторами:
а) стабильностью параметров траектории космического аппарата (H,WX) и обеспечению точной угловой ориентации антенны - порядка угловых минут по осям крена, тангажа и сноса за время, на несколько порядков превышающее время синтеза азимутальных диаграмм направленности лучей;
б) высокими значениями ЭПР (эффективной поверхности рассеяния) движущихся локальных отражателей по сравнению с эквивалентным ЭПР фонового сигнала при малых размерах осредняющих площадок в современных космических РСА, использующих широкополосный сигнал и антенну со сравнительно небольшим (единицы метров) горизонтальным размером. Именно такой случай характерен в задаче «освещения судовой обстановки» из космоса, см. фиг. 1.
Имеющиеся технологии ФАР (фазированных антенных решеток) позволяют сформировать в антенне космического РСА два независимых разнесенных по азимуту луча. Указанные выше факторы позволяют измерять только координаты движущего отражателя в двух яркостных изображениях. Определяющую роль здесь, как и в примере фиг. 1, играет тангенциальный сдвиг отклика РСА при наличии радиальной скорости. Что же касается точности скоростных измерений, то она почти полностью определяется точностью совмещения и навигационной привязки координат в двух независимо-формируемых изображениях.
На фиг. 2 представлена геометрия визирования поверхности в двухлучевом РСА. Используется азимутальный разворот плоскостей излучения на небольшой угол β~±15°, т.е. искусственный угол сноса, величина которого (благодаря системе ориентации аппарата) поддерживается строго постоянной на всей траектории. Обозначены: Н - высота траектории; Wx - скорость аппарата; γn - угол визирования отражателя; Rn - наклонная дальность отражателя; θ - угол наклона плоскости антенны, обычно принимают  ; Vx и Vy - тангенциальная (продольная) и радиальная (поперечная) составляющие вектора скорости отражателя; Ly - ширина кадра радиолокационного изображения;
; Vx и Vy - тангенциальная (продольная) и радиальная (поперечная) составляющие вектора скорости отражателя; Ly - ширина кадра радиолокационного изображения;  - расстояние между точкой визирования в двух лучах; (х1, y1) и (х2, y2) - координаты отражателя на поверхности, визируемые левым (задним) и правым (передним) лучами антенны; (х0, y0) - траверсные координаты отражателя.
- расстояние между точкой визирования в двух лучах; (х1, y1) и (х2, y2) - координаты отражателя на поверхности, визируемые левым (задним) и правым (передним) лучами антенны; (х0, y0) - траверсные координаты отражателя.
Проследим, из-за каких факторов отметка движущегося отражателя перемещается в яркостном РСА-изображении для каждого из двух лучей. Во-первых, имеется значительная задержка между визированиями отражателя левым и правым лучами на отрезке траектории  . В космических условиях (H=6⋅105 м, γn=30°, β=15°) эта величина составляет ~200 км, что соответствует задержке Δt~25 с при скорости аппарата Wx=8⋅103 м/с. Отражатель, двигаясь со скоростью порядка 10 м/с, за это время переместится на 250 м - что намного превышает размер элемента разрешения современного космического РСА. В то же время, при рациональном в данном случае азимутальном разрешении rx=10 м, требуемый размер синтезированной апертуры составляет Lx=ΔН/rxcosγn=2⋅103 м (длина волны сигнала λ=3⋅10-2 м). Это означает, что за время синтеза ts=Lx/Wx~0,2 с отражатель остается в пределах симметричной площадки Sn=d2 размером d=dx=dy=rx (при необходимом для осреднения спекл-шума числе N элементов дальности на площадке, N=2dΔƒsinγn/с~10, что обеспечивается шириной спектра сигнала Δƒ=3⋅108 Гц).
. В космических условиях (H=6⋅105 м, γn=30°, β=15°) эта величина составляет ~200 км, что соответствует задержке Δt~25 с при скорости аппарата Wx=8⋅103 м/с. Отражатель, двигаясь со скоростью порядка 10 м/с, за это время переместится на 250 м - что намного превышает размер элемента разрешения современного космического РСА. В то же время, при рациональном в данном случае азимутальном разрешении rx=10 м, требуемый размер синтезированной апертуры составляет Lx=ΔН/rxcosγn=2⋅103 м (длина волны сигнала λ=3⋅10-2 м). Это означает, что за время синтеза ts=Lx/Wx~0,2 с отражатель остается в пределах симметричной площадки Sn=d2 размером d=dx=dy=rx (при необходимом для осреднения спекл-шума числе N элементов дальности на площадке, N=2dΔƒsinγn/с~10, что обеспечивается шириной спектра сигнала Δƒ=3⋅108 Гц).
Будем считать скорость и курс отражателя за время неизменными и примем во внимание азимутальный сдвиг отметки отражателя при синтезировании, обусловленный радиальной проекцией вектора скорости отражателя на горизонтальную ось каждого из двух лучей. На траверсе этот сдвиг составляет  , а величина задержки между лучами составляет
, а величина задержки между лучами составляет  . Обозначив характерную величину
. Обозначив характерную величину  (в наших условиях это ~40 с), вычислим для каждого из лучей смещение W координат отражателя относительно его истинных координат.
(в наших условиях это ~40 с), вычислим для каждого из лучей смещение W координат отражателя относительно его истинных координат.
Обозначим истинные (географические) координаты отражателя в момент прохождения траверса через  , а измеряемые в каждом из отклоненных лучей через (х1,у1,х2,у2). Азимутальное смещение в РСА составляет xv=QVy, а смещение между лучами во времени Δt=2Qtgβ. Обозначим регистрируемые координаты в траверсном (несуществующем) луче, т.е. при β=0:
, а измеряемые в каждом из отклоненных лучей через (х1,у1,х2,у2). Азимутальное смещение в РСА составляет xv=QVy, а смещение между лучами во времени Δt=2Qtgβ. Обозначим регистрируемые координаты в траверсном (несуществующем) луче, т.е. при β=0:  . Легко видеть, что в правом (переднем) луче эти координаты составят
. Легко видеть, что в правом (переднем) луче эти координаты составят

а в левом (заднем) луче, соответственно, они составят

Из четырех уравнений для регистрируемых координат вычисляются четыре величины  :
:

Из выражений (5) и (6) видно, что для точного определения составляющих скорости отражателя необходимо точное определения разностей их координат, восстанавливаемых в двух РСА-изображениях. Из выражений (3) и (4) можно определить истинные координаты отражателя в момент его нахождения в точке траверса.
При использовании данного способа скоростных измерений необходимо учитывать следующие его особенности. Во-первых, при отсутствии предварительной скоростной селекции, в области обзора могут оказаться и неподвижные отражатели. Как видно из выражений (5) и (6), неподвижные отражатели при определении разности координат подавляются, однако глубина подобного подавления опять-таки зависит от точности совмещения изображений и навигационной привязки координат, т.е. эта ошибка является систематической. Затем, возникает проблема множественности движущихся отражателей. При использовании яркостных РЛИ в РСА для всех отражателей (подвижных и неподвижных) разрешение по обеим координатам одинаково (в рассматриваемом случае d~10 м). Введя в алгоритмы (3-6) определенные усложнения, представляется возможным измерять параметры нескольких движущихся объектов - однако приближенные расчеты показывают, что расстояние между ними при этом не должно превышать ~VΔt - т.е. должно быть не менее ~1 км в приведенных условиях. В то же время, преимуществом предлагаемого способа скоростных измерений по сравнению с доплеровским и интерференционным является чрезвычайно малое влияние на точность измерений таких факторов, как скорость аппарата и скорость вращения Земли.
Возможность реализации
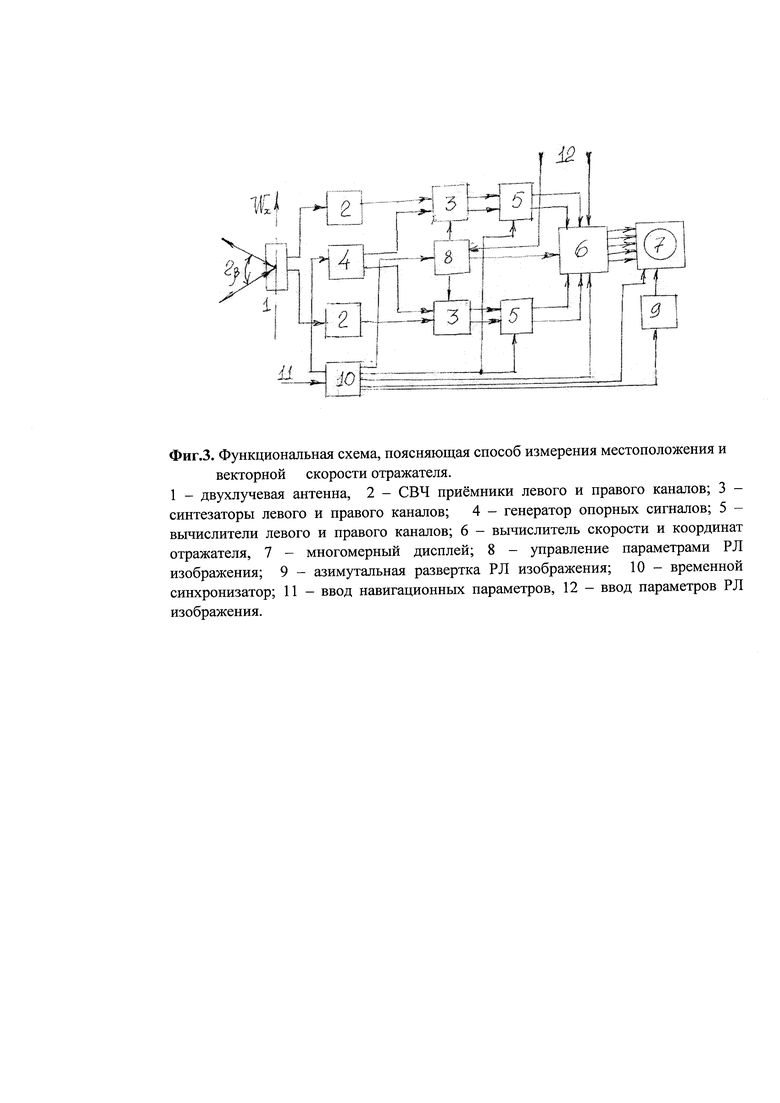
Функциональная схема предлагаемого способа измерений вектора скорости локальных отражателей представлена фиг. 3, где обозначены: 1 - двухлучевая антенна, 2 - СВЧ приемники левого и правого каналов; 3 - синтезаторы левого и правого каналов; 4 - генератор опорных сигналов; 5 - вычислители левого и правого каналов; 6 - вычислитель вектора скорости и траверсных координат отражателя, 7 - многомерный дисплей; 8 - управление параметрами изображения; 9 - азимутальная развертка РЛ изображения; 10 - временной синхронизатор; 11 - ввод навигационных параметров, 12 - ввод параметров РЛ изображения. Элементы радиопередающего устройства, модуляции и сжатия широкополосного СВЧ сигнала, формирования строк дальности и развертки изображения по оси дальности на фиг. 2 не показаны.
Формирование радиолокационного изображения с селекцией движущегося локального отражателя и с измерением его векторной скорости происходит следующим образом. Сигналы от двухлучевой антенны (1) поступают в СВЧ приемники (2), затем на синтезаторы (3), куда поступают опорные сигналы от генератора (4), сигналы управления параметрами синтеза (8) и временной синхронизации (10). Вычислители (5) выполняют операции по формированию яркостных изображений каналов, вычислитель (6) выполняет операции по определению траверсных координат движущегося отражателя (см. выражения 3 и 4) и измерения двух составляющих его скорости (см. выражения 5 и 6). На многомерный дисплей (7), формирующий яркостное изображение поверхности с движущимся отражателем, поступают сигналы от вычислителя (6), блока азимутальной развертки (9) и временного синхронизатора (10). Ввод навигационных параметров (11) в систему временной синхронизации (10) необходим для точной привязки координат формируемых изображений к координатам местности. Ввод параметров радиолокационного изображения (12) предусматривает изменение (в определенных пределах) времени азимутального синтеза, определяющего разрешение (rx) и размер усредняющей площадки (d).
Источники информации
1. Объекты радиолокации. Обнаружение и распознавание, п/ред. А.В. Соколова / М., Радиотехника, 2007, глава 4: Радиолокационное изображение цели при апертурном синтезе со сверхвысоким разрешением радиолокатора с синтезированной апертурой, с. 117-128.
2. Достовалов М.Ю., Неронский Л.Б., Переслегин СВ. Исследование поля скорости океанских течений по фазометрическим данным, полученным РСА космического аппарата «ERS» // Океанология, 2003, т. 43, №3, с. 473-480.
3. Neronsky L.B., Dostovalov M.Ju., Pereslegin S.V. The extended algorithms for Doppler centroid estimation // Proc. EUSAR-2004, Ulm, Germany, May2004, v. 2, pp. 709-712.
4. Romeiser R., Suchand S., Hartmut R., Steinbrecher U., Grimier S. First Analysis of TerraSAR-X Along-Track InSAR-Derived Current Fields // IEEE Trans, on Geoscience and Remote Sensing, v. 48, No 2, pp. 820-829.
5. Переслегин С.В., Халиков З.А. Обработка сигналов в радиолокаторах с синтезированной апертурой при восстановлении скоростных полей поверхности Земли // Изв. ВУЗов. Радиофизика. 2014, №1, с. 1-13.
6. Каневский М.Б. Оценка возможностей интерференционного РСА с продольной базой в задаче измерения скорости течений на поверхности океана // Изв. ВУЗов, Радиофизика, 2012, т. LV, №4, с. 294-298.
7. Joao Moreira, Wolfgang Keydel. Method for detection, localization and velocity determination of moving targets from raw radar data from a coherent, single or multi-channel image system carried along in a vehicle / US Patent, Number 5.539408, Data of patent Jul. 23, 1996.
8. Takashi Fujimura. Along-track interferometric synthetic aperture radar / US Patent, Number 5.945.937408, Data of patent Aug. 31, 1999.
9. Переслегин С.В., Захаров A.M., Халиков З.A., Ивонин Д.В., Достовалов М.Ю., Шапрон Б. Способ измерения радиальной скорости отражателя в радиолокаторе бокового обзора с синтезированной апертурой // Российский патент №2537788, приоритет 10.09.2013.
10. Martin Kirscht. Method of detecting moving objects and estimating their position in SAR images / US Patent, Number 6.952.178 B2, Data of patent Oct. 4, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРНОГО ПОЛЯ СКОРОСТИ ОКЕАНСКИХ И РЕЧНЫХ ТЕЧЕНИЙ В КОСМИЧЕСКОМ РСА | 2015 |
|
RU2597148C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОТРАЖАТЕЛЯ В РАДИОЛОКАТОРЕ БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2013 |
|
RU2537788C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВОДНОГО ГИДРОДИНАМИЧЕСКОГО ИСТОЧНИКА ПО СКОРОСТНОМУ РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2703522C1 |
| СПОСОБ ОПЕРАТИВНОГО ПОИСКА И ОБНАРУЖЕНИЯ ПОДВОДНОГО ИСТОЧНИКА ЗВУКА | 2018 |
|
RU2794213C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ ОКЕАНСКИХ ЯВЛЕНИЙ ИЗ КОСМОСА | 2009 |
|
RU2447457C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И АЗИМУТАЛЬНОЙ КООРДИНАТЫ НАДВОДНЫХ ЦЕЛЕЙ РАДИОЛОКАТОРАМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2014 |
|
RU2566662C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВОДНОГО ГИДРОДИНАМИЧЕСКОГО ИСТОЧНИКА (ГДИ) ПО КВАЗИЗЕРКАЛЬНОМУ РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2763947C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОБЪЕКТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ В РАДИОЛОКАТОРЕ С СИНТЕЗИРОВАННОЙ АПЕРАТУРОЙ АНТЕННЫ | 1994 |
|
RU2101727C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА ИМПУЛЬСНОГО КОГЕРЕНТНОГО РАДИОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2229728C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
Изобретение относится к радиолокации поверхности Земли с космических аппаратов и может быть использовано для оперативной оценки из космоса судовой обстановки с определением местоположения и скорости кораблей, не прибегая к более сложному (интерференционному) методу. Достигаемый технический результат – повышение точности измерения. Сущность способа заключается в определении вектора скорости, что достигается сравнением координат отражателя в двух яркостных изображениях, используя зависимость этих координат от задержки во времени визирования в разнесенных лучах и азимутального сдвига отметки отражателя, пропорционального проекции его радиальной скорости на направление луча. Точность измерения обеих составляющих скорости при этом зависит исключительно от точности совмещения и навигационной привязки координат двух формируемых изображений к координатам местности и практически не зависит от таких факторов, как скорость аппарата и скорость вращения Земли (изменяющаяся по широте). 3 ил.
Способ формирования изображения морской поверхности с отображением вектора скорости корабля в космическом радиолокаторе с синтезированной апертурой (РСА), использующий два независимых луча антенны, симметрично отклоненных по азимуту на малый угол и формирующих два яркостных изображения с навигационной привязкой регистрируемых координат поверхности к географическим координатам, отличающийся тем, что по полученным в двух изображениях четырем регистрируемым координатам отражателя, используя полученные значения временных азимутальных интервалов между лучами и полученные значения пространственных азимутальных сдвигов положения отражателя, определяемых проекциями его радиальной скорости на луч при синтезе азимутальной диаграммы направленности, вычисляют его траверсные координаты, вычисляют радиальную и тангенциальную скорости отражателя, по вычисленным четырем параметрам формируют векторно-скоростное радиолокационное изображение отражателя на фоне поверхности с привязкой к географическим координатам.
| US 6952178 B2, 04.10.2005 | |||
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРНОГО ПОЛЯ СКОРОСТИ ОКЕАНСКИХ И РЕЧНЫХ ТЕЧЕНИЙ В КОСМИЧЕСКОМ РСА | 2015 |
|
RU2597148C1 |
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОТРАЖАТЕЛЯ В РАДИОЛОКАТОРЕ БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2013 |
|
RU2537788C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И АЗИМУТАЛЬНОЙ КООРДИНАТЫ НАДВОДНЫХ ЦЕЛЕЙ РАДИОЛОКАТОРАМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2014 |
|
RU2566662C1 |
| WO 2010138225 A3, 27.01.2011 | |||
| US 5945937 A, 31.08.1999. | |||

