Изобретение относится к области маскировки наземных мобильных объектов от космических систем радиолокационного наблюдения путем обеспечения снижения их отражающих свойств на фоне окружающей местности.
Известны способы скрытия наземных мобильных объектов как в оптическом, так и в радиолокационном (РЛ) диапазонах путем снижения отражательных характеристик объекта до уровня отражательных характеристик фона окружающей местности. В оптическом диапазоне применяются специальные типы окрашивания (защитная, деформирующая и имитирующая окраски под типовые фоны местности районов применения объектов) и маскировочные сети. В РЛ диапазоне на мобильных объектах применяются специальные радиопоглощающие и радиорассеивающие покрытия и маски, снижающие отражение от металлических частей объектов до уровня отражательных характеристик окружающего фона местности. В качестве аналога можно указать устройство, в котором реализован способ снижения отражательных характеристик за счет деполяризации и флюктуации амплитуд и фаз отраженного сигнала [1]. Маскировочный материал в форме мата устанавливают над крышей наземного мобильного объекта и снабжают набором дипольных отражателей с гибким креплением и хаотической ориентацией в горизонтальной и вертикальной плоскостях и возможностью регулировки длины в целях адаптации к длине волны РЛ сигнала. По сути, на крыше наземного мобильного объекта устанавливается устройство, имитирующее участок местности с растительным фоном и соответственно воспроизводящее с некоторой степенью подобия ее отражательные характеристики - удельную эффективную площадь рассеяния (УЭПР) σФ0, учитывающую угловую, частотную, поляризационную, сезонную и метеорологическую зависимость. Для РЛ наблюдения (РЛН) участков поверхности Земли (УПЗ) из космоса используют радиолокаторы с синтезированной апертурой антенны (КРСА) с когерентной обработкой сигнала в режиме картографирования, имеющие разрешающую способность радиолокационного изображения (РЛИ) Δ до метра. Поэтому РЛИ неподвижных объектов, обладающих некоторой эффективной площадью рассеяния (ЭПР) σ, будет состоять из совокупности элементов (пикселов) 

- интенсивность отражения элементов объекта,

- интенсивность отражения элементов фона окружающей местности,
- Кдоп - допустимое значение РЛ контраста.
ЭПР наземных мобильных объектов при РЛН из верхней полусферы лежит в диапазоне σ=8-10 м2 [2, с.145]. В отличие от РСА воздушного базирования в КРСА режим наблюдения (селекции) движущихся целей (СДЦ) не реализуется из-за слабокоррелированности фона, возникающего вследствие больших скоростей перемещения КРСА относительно вращающейся поверхности Земли. На данном этапе развития в некоторых КРСА зарубежных государств (Radarsat-2, TerraSAR-X, TanDEM-X) реализуется режим продольной интерферометрии для наблюдения только крупноплощадных движущихся объектов типа морских течений.
Для способа скрытия в аналоге предусматривается съезд наземных мобильных объектов с дороги и размещение их на придорожных участках с соответствующими отражательными характеристиками на период осуществления наблюдения, что означает потерю времени при их перебазировании. Грунтовые дороги и дороги с улучшенным покрытием (гравий, асфальт, бетон) в оптическом диапазоне являются более светлыми, чем окружающий фон местности, а в РЛ диапазоне - менее шероховатыми (более гладкими), от которых происходит зеркальное отражение падающего РЛ сигнала. При наклонном РЛН объекта на гладком фоне дороги дополнительно возникает усиление отражения сигналов и соответственно повышения яркости пикселов РЛИ из-за образуемого двухгранного угла «горизонтальная поверхность - вертикальный объект» [3, с.90]. Т.о. указанный в аналоге способ не обеспечивает достаточного снижения отражательных характеристик наземного мобильного объекта.
Известны способы скрытия мобильных объектов (самолетов) от РЛН головки самонаведения (РЛ ГСН) ракет «воздух-воздух» путем введения доплеровского частотного сдвига в переизлучаемый сигнал [4], соответствующего нескольким ложным целям, различающимся по радиальной скорости относительного перемещения ракеты и самолета. Как правило, в зависимости от типа импульсно-доплеровской РЛ ГСН ракеты (режимы излучения, величина частота повторения импульсов, тип обзора пространства) формируется множество ложных (уводящих) стробов по дальности и по радиальной скорости, способствующие срыву сопровождения путем заполнения всех или некоторой части доплеровских фильтров системы обработки РЛ ГСН. Уводящие помехи формируются в кратковременный период времени (до десятков секунд), но достаточный для введения в заблуждение системы обработки РЛ ГСН и соответствующего промаха ракеты. Дополнительно производится амплитудная модуляция уводящих стробов, имитирующая снижение ЭПР имитируемых целей и комбинация подобного радиоэлектронного противодействия по прямому и отраженному от УПЗ лучу помехового воздействия для низколетящих самолетов. Описанные способы скрытия реальной цели (самолета) на фоне других ложных целей, включая фон УПЗ, требуют наличия специализированной станции помех на борту (фюзеляже) самолета или буксируемой за ним на тросе активной радиолокационной ловушке [5]. Подобная конструкция пространственно разнесенных источников помех позволяет дополнительно противодействовать слежению РЛ ГСН по угловому положению. В силу аэродинамических эффектов колебание троса приводит к угловому перемещению самолета и ловушки относительно линии визирования РЛ ГСН, т.е. дополнительной тангенциальной скорости наблюдаемых целей. Т.о. указанный в аналоге способ обеспечивает достаточное снижение отражательных характеристик мобильного объекта (самолета), но путем использования сложной станции радиопомех.
Из известных решений наиболее близким по технической сущности к заявляемому изобретению является способ скрытия мобильных объектов (самолетов) от РЛН, выбранный в качестве прототипа, на основе совершения маневров уклонения от ракет с РЛ ГСН, т.е. помехи для срыва слежения РЛ ГСН создаются не целенаправленным переизлучением модифицированных сигналов, а естественным отражением РЛ сигналов от фюзеляжа самолета, совершающего необходимое кратковременное пространственное перемещение относительно дальностно-углового положения направления подлета ракеты [6, с.47; 7]. Маневры уклонения предполагают интенсивное изменение углового положения самолета в пространстве с одновременным использованием значительных угловых скоростей и существенного искривления траектории при изменении этого положения. Так называемый гарантированный отворот траектории самолета на угол до 90-120° в вертикальной плоскости (кратковременный маневр - до 5-6 секунд - типа «кобра Пугачева», «колокол», «чакра Фролова», «пикирование»), в горизонтальной плоскости (кратковременный маневр типа «хук», «горизонтальная кобра») и в обеих плоскостях (кратковременный маневр типа «разворот/вираж», «штопор») приводит к изменению (уменьшению) как радиальной (дальностной), так и увеличению тангенциальной и трансверсальной (т.е. угловых) составляющих скорости относительного перемещения облучаемого самолета и излучающей РЛ ГСН ракеты за счет аэродинамического торможения фюзеляжем самолета и искривления его траектории [8]. Подобные маневры приводят к срыву наведения и сопровождения РЛ ГСН ракет. Спектр переотражаемых сигналов (пачек когерентных импульсов РЛ ГСН) изменяется - за счет радиальной составляющей скорости движения объекта (самолета) происходит его доплеровское смещение, а за счет тангенциальной и трансверсальной составляющих - его размытие (расширение), в результате сигнал от цели попадает в полосу пропускания нескольких доплеровских фильтров системы обработки РЛ ГСН. С учетом уменьшения спектральной плотности мощности отраженного сигнала за счет расширения спектра это приводит к снижению РЛ контраста на фоне метеобразований и/или поверхности Земли. При небольшой дальности до цели, когда отраженный сигнал имеет большую мощность, размывание спектра по нескольким фильтрам может привести к принятию ложного решения о наличии нескольких целей. Т.о., в прототипе обеспечивается снижение отражательных характеристик мобильного объекта путем совершения кратковременного пространственного маневра, но использование стробирования по дальности в системе обработки РЛ ГСН влияние фона Земли и метеообразований можно устранить.
Задача изобретения заключается в снижении уровня обнаружения и распознавания наземного мобильного объекта при радиолокационном наблюдении космическим радиолокатором с высоким пространственным разрешением путем совершения целенаправленного маневра - кратковременного движения объекта с определенной скоростью по дороге с определенной азимутальной ориентацией в момент времени радиолокационного наблюдения на основе учета отражательных характеристик фона местности, окружающей дорогу.
Для решения указанной задачи в предлагаемом способе скрытия наземного мобильного объекта:
снижают отражательные характеристики наземного мобильного объекта до уровня отражательных характеристик фона участков окружающей местности,
придают доплеровский частотный сдвиг отраженному радиолокационному сигналу путем совершения наземным мобильным объектом кратковременного маневра уклонения на интервале радиолокационного наблюдения,
на основе априорно известных географического расположения маршрута движения наземного мобильного объекта, параметров орбиты и параметров ориентации диаграммы направленности антенны космического радиолокатора рассчитывают моменты времени пролета космического радиолокатора точек минимальной дальности до него от объекта и соответствующих им углов места и азимута направления радиолокационного наблюдения;
определяют участок дорожной сети по маршруту перебазирования наземного мобильного объекта, имеющий достаточную протяженность, качество покрытия и азимутальную ориентацию, близкую к азимуту направления радиолокационного наблюдения в момент пролета космического радиолокатора;
на основе априорно известного частотного диапазона, поляризации и разрешающей способности радиолокационного изображения, формируемого космическим радиолокатором, габаритных и отражательных характеристик наземного мобильного объекта и площадных объектов местности, имеющих угловую, частотную, поляризационную, сезонную и метеорологическую зависимость, определяют радиолокационный контраст элементов радиолокационного изображения наземного мобильного объекта и фона окружающей местности вблизи участка дороги;
на основе априорно известной максимальной развиваемой скорости движения наземного мобильного объекта выбирают вблизи участка дороги площадной объект местности, обеспечивающий минимальный радиолокационный контраст наземного мобильного объекта на фоне местности и находящийся на расстоянии вдоль трассы полета космического радиолокатора, не превышающем максимально возможной величины азимутального смещения радиолокационного изображения наземного мобильного объекта относительно участка дороги;
осуществляют разгон на выбранном участке дороги в требуемом азимутальном направлении и удержание скорости наземного мобильного объекта в момент радиолокационного наблюдения, обеспечивающей смещение его радиолокационного изображения на выбранный участок местности.
Вследствие закономерностей землеобзора (направление РЛН перпендикулярно трассе и ограничено некоторым диапазоном углов крена ДНА Δγ=γmax-γmin и соответственно углов места ΔУМ=УМmах-УМmin) и орбитального движения КРСА установлен дискретный характер РЛН как по углам, так и по времени [9]:

RЗ=6371 км средний радиус Земли,
H - высота орбиты КРСА.
Азимут РЛН AЗ определяется через центральный угол ψγ, соответствующий углу крена ДНА



i - наклонение орбиты КРСА.
В зависимости от географической широты месторасположения наблюдаемого УПЗ диапазон углов азимута направления РЛН из космоса ограничен: как из-за ограничения углов места (углов крена ДНА КРСА), так и из-за стороны РЛ обзора от трассы и наклонения орбиты КРСА. Реализуемый угол крена ДНА при пролете КРСА и, следовательно, угол места УМ направления РЛН однозначно определяет его угол азимута AЗ; в итоге направление на КРСА - направление РЛН - соответствует кратчайшему (траверсному) расстоянию до него. Периодические коррекции орбиты КРСА для поддержания требуемой высоты, исходя из целей реализации режимов РЛН, поддержания баллистической структуры системы КРСА и загрузки наземного сегмента комплекса управления, приводит к изомаршругаости (повторяемости) трасс КРСА. Это означает, что из всего непрерывного множества диапазона углов места и азимута направления РЛН реализуются только дискретные значения. Кроме этого, интервал между пролетами одного КРСА и соответствующего РЛН на траверсном направлении кратен периоду орбиты, который для практических случаев орбит КРСА составляет ~1.5 часа. Если в состав орбитальной группировки входит несколько КРСА, то интервал между РЛН будет определяться параметрами баллистической структуры. Длительность моментов РЛН (собственно интервал синтезирования апертуры антенны) составляют от долей до 10-12 секунд. Пространственные (дискретные углы места и азимута) и временные (моменты пролета КРСА и интервалы между ними) показатели направлений РЛН носят устойчивый характер: при баллистическом прогнозировании полета КРСА до 1-2 месяцев интервалы между РЛН меняются в пределах единиц минут, а углы РЛН - единиц градусов. Таким образом, каждому РЛН КРСА соответствует набор параметров:
- пространственных - углы РЛН УМ и AЗ,
- временных - момент РЛН Т и интервал времени после предыдущего РЛН ΔT,
- радиотехнических - длина волны (частота) РЛ сигнала λ, поляризация П и разрешающая способность РЛИ Δ (определяется шириной спектра РЛ сигнала Δf и частотой повторения импульсов fЧПИ, излучаемых КРСА)

При априорно неизвестном режиме функционирования (разрешающей способности РЛИ Δ и поляризации П), реализуемом КРСА в данном РЛН, можно предполагать наихудший вариант для скрываемого объекта, т.е. формирование в КРСА максимально детального РЛИ УПЗ в многополяризационном режиме.
Линейная скорость участка вращающейся поверхности Земли на географической широте В определяется через линейную скорость на экваторе УЗЭ=465 м/с

Величина этой скорости определяет параметры доплеровской обработки отраженных сигналов в КРСА в режиме картографирования УПЗ (опорную функцию в синтезе РЛИ). Составляющие линейной скорости вращения Земли лежат в плоскости XOY, касательной к сферической поверхности Земли в точке РЛН (рис.1), т.е. продольная (азимутальная) проекция на ось OY будет тангенциальной составляющей, а трансверсальная и радиальная составляющие образуют поперечную проекцию на ось OX. Это является типовым представлением составляющих скорости при синтезировании РЛИ УПЗ в координатах «наклонная-продольная дальность», при этом наклонная (траверсная) дальность от КРСА до объекта в середине интервала синтезирования определяется как

Тангенциальная составляющая относительной скорости перемещения КРСА V и УПЗ VЗ

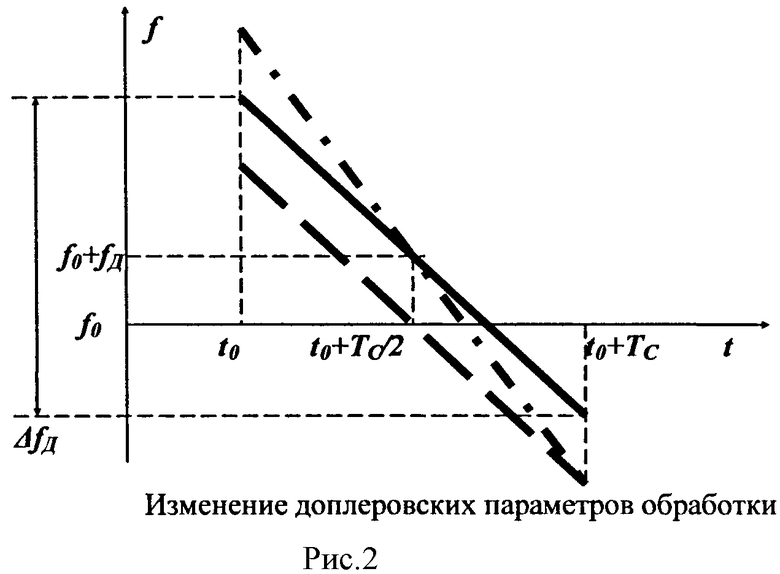
определяет крутизну линейной частотной модуляции (рис.2, сплошная линия) и соответственно ширину доплеровского спектра ΔfД при известной ширине диаграммы направленности реальной антенны КРСА θ (ширине пятна ДНА RC≈Rtgθ на УПЗ для известной наклонной дальности R).
где GM-398600.448 км3/с2 - гравитационная постоянная Земли.
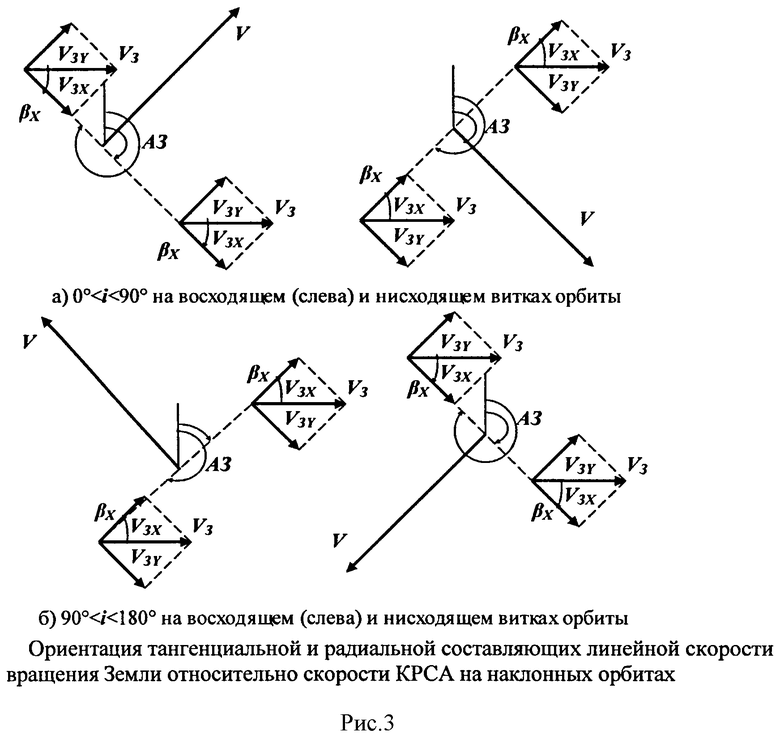
Выбор величины частоты повторения импульсов fЧПИ в КРСА определяется именно этой составляющей скорости относительного перемещения, исходя из теоремы Котельникова. Знак «-» в тангенциальной составляющей скорости (8) соответствует прямым наклонным орбитам (0°<i<90°), а знак «+» - обратным наклонным орбитам (90°<i<180°). Величина тангенциальной составляющей линейной скорости вращения Земли определяется ориентацией плоскости орбиты КРСА

(т.е. для полярных орбит она отсутствует) и практически постоянна на всем витке орбиты КРСА из-за «согласованного» изменения линейной скорости вращения Земли с широтой подспутниковой точки и азимутального направления трассы КРСА [10].
Радиальная составляющая линейной скорости вращения Земли

вычисляется на основе поперечной проекции скорости (рис.3)

AЗ - азимут направления РЛН, определяемый по (6).
Радиальная составляющая линейной скорости вращения Земли изменяется от максимального значения на экваторе (В=0°) до нулевого в точках вертекса орбиты (B≈0°) и определяет среднюю частоту доплеровского спектра

Кроме этого, она минимальна на ближней границе полосы обзора КРСА (т.е. при γmin и УМmах) и максимальна на дальней границе (при γmax и УМmin). Знак «+» средней доплеровской частоты соответствует левому обзору КРСА (слева от трассы КРСА) на восходящем витке и правому обзору на нисходящем витке (УПЗ «набегает» на КРСА), а знак «-» - правому обзору на восходящем витке и левому обзору на нисходящем витке (УПЗ «убегает» от КРСА). Для упрощения синтеза РЛИ средняя доплеровская частота устраняется либо аппаратно (ориентацией ДНА по курсу на так называемое направление «нулевого Доплера» ≈±3° от перпендикулярного направления), либо программно в ходе квадратурной обработки отраженных когерентных импульсов (рис.2, пунктирная линия). Последний способ используется в качестве штатного режима во всех КРСА, т.к. облегчает постоянное поддержание космического аппарата в заданной угловой ориентации.
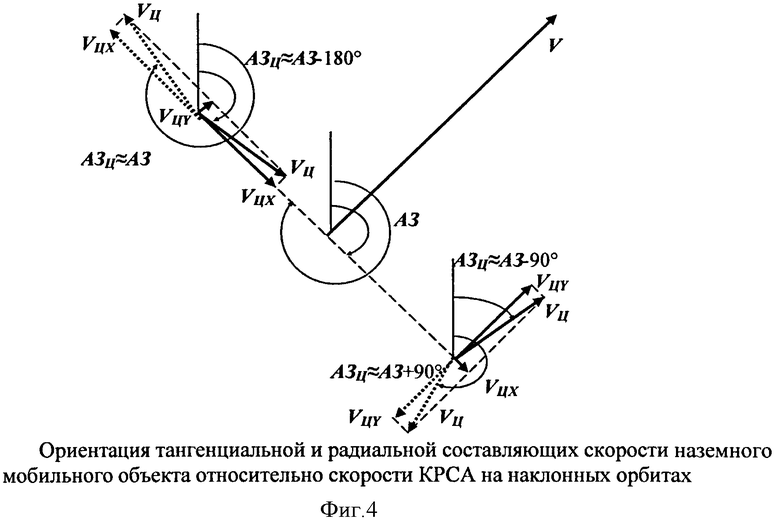
Движение и соответственно составляющие скорости VЦ наземного мобильного объекта (рис.1, 4) определяются азимутальной ориентацией дороги, направлением движения (по радиальному направлению VЦХ - к трассе КРСА или от нее; по тангенциальному направлению VЦY - навстречу или по направлению полета КРСА параллельно его трассе) и величиной скорости (ходовыми свойствами наземного мобильного объекта и качеством покрытия дороги). Трансверсальная составляющая скорости наземного мобильного объекта, образующаяся из-за продольного уклона дороги (крутизны подъема или спуска), имеет пренебрежимо малые значения для рассматриваемых эффектов из-за строительных норм при оборудовании дорог [11].
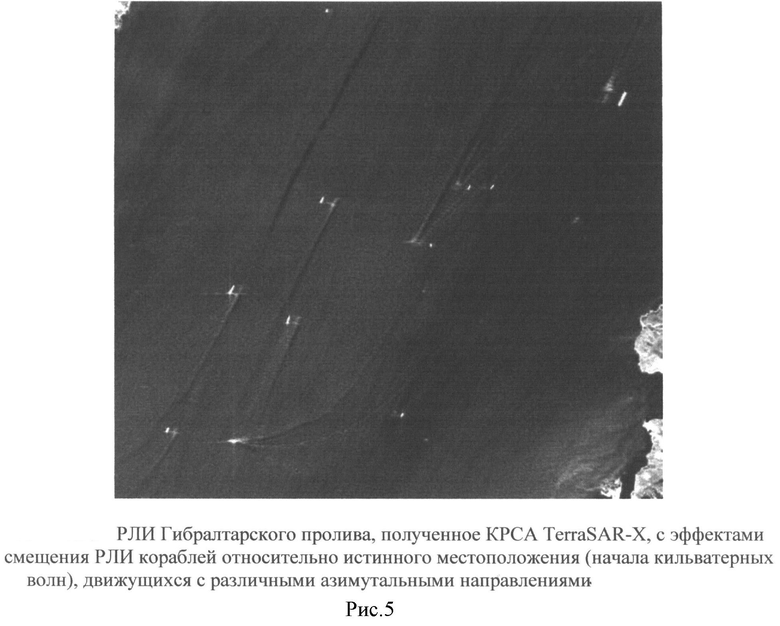
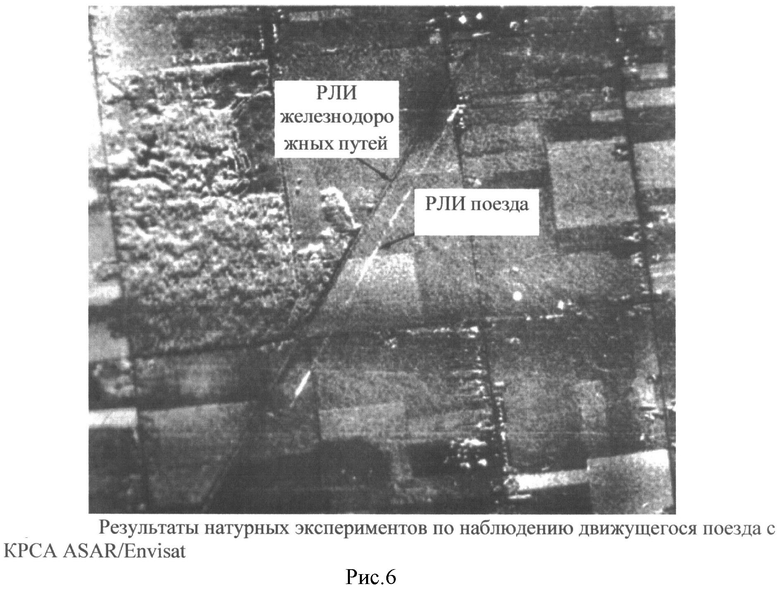
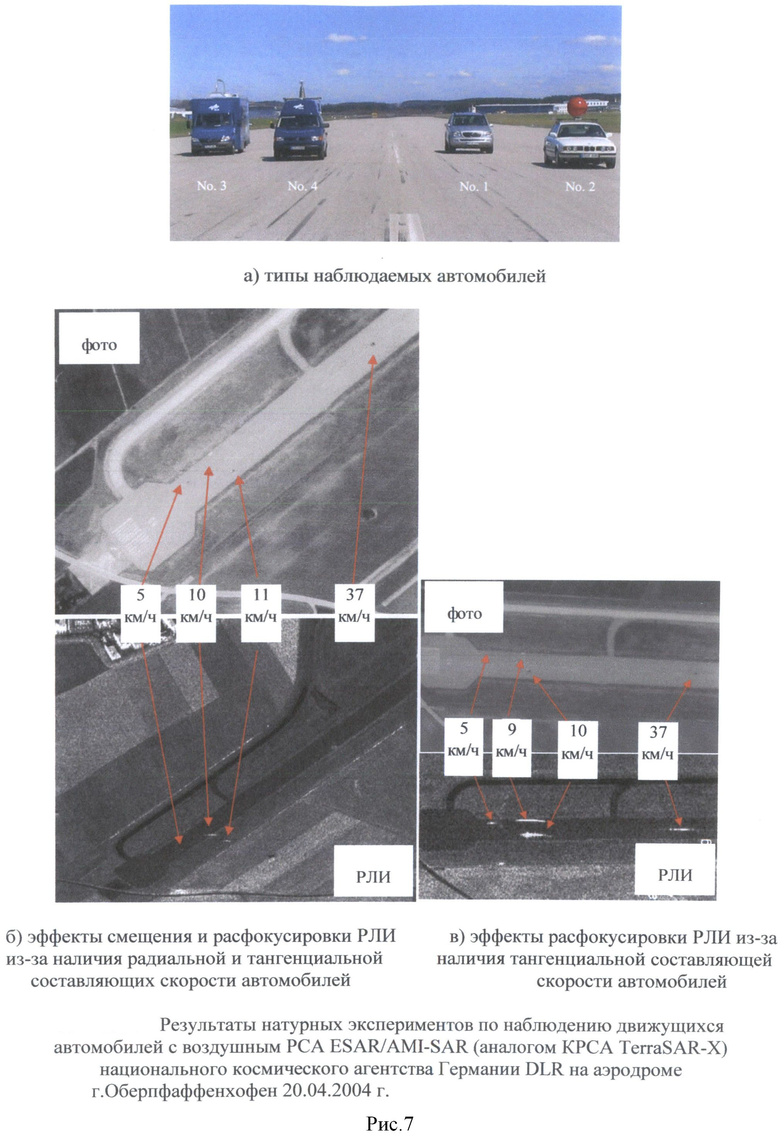
С учетом частотных диапазонов КРСА λ=3÷23 см (f0=10÷1.3 ГГц), ограниченного диапазона углов места для КРСА УМ=20÷70° и скорости наземных мобильных объектов VЦ=0÷60 км/ч (0÷16.7 м/с) максимально достижимая радиальная составляющая скорости движения равна 5.7÷15.7 м/с (соответственно ближняя и дальняя граница полосы обзора) и максимально достижимая средняя доплеровская частота ±380÷±1047 Гц для λ=3 см и ±50÷±137 Гц для λ=23 см. Эти значения средней доплеровской частоты, дополнительные к доплеровскому сдвигу от радиальной составляющей линейной скорости вращения Земли как одному из параметров обработки, приводят к смещению элементов РЛИ объекта по азимуту (продольной координате, вдоль трассы КРСА) кадра синтезированного РЛИ УПЗ относительно его истинного положения на дороге [3, с.178; 12, с.305-308]. Явление азимутального смещения РЛИ объекта относительно своего истинного положения в кадре наблюдается для всех наземных мобильных объектов - морских кораблей (рис.5), поездов (рис.6), автомобилей (рис.7a). Направление смещения определяется знаком средней доплеровской частоты, а величина смещения Δy - отношением радиальной составляющей скорости объекта VЦR к скорости КРСА V и величиной наклонной дальности R

где АЗЦ - азимутальная ориентация дороги. Для максимального смещения РЛИ объекта вправо (по продольной координате навстречу КРСА) относительно своего истинного положения в кадре РЛИ УПЗ движение должно осуществляться навстречу КРСА АЗЦ=АЗ, для смещения влево (по продольной координате по направлению полета) - от КРСА АЗЦ=AЗ±180°. Для высот орбит H=400÷800 км и углов места УМ=20÷70° в соответствии с (9) наклонная дальность лежит в диапазоне R=427-977÷847-1720 км. Соответственно диапазон смещения для радиальной составляющей скорости объекта VЦR=±5.7÷±15.7 м/с и скорости КРСА V=7673÷7456 м/с составляет Δу=±317-1998÷±648-3622 м, т.е. величина смещения РЛИ объекта соизмерима с шириной пятна ДНА RC для ширины реальной ДНА КРСА θ=0.5-1°. Это означает, что интенсивность пикселов РЛИ объекта может быть снижена до уровня 0.7 от максимальной за счет уменьшения усиления отражения на краях реальной ДНА КРСА [13, с.108]. Для подобных высоко детальных РЛИ однородного фона УПЗ характерно наличие спекл-шума (зернистости РЛИ - вариации интенсивности отражения пикселов до 10-15%), дополнительно способствующего скрытию РЛИ объекта на РЛИ УПЗ. Сочетание спекл-шума РЛИ и снижения интенсивности РЛИ объекта при его смещении на однородный фон с сильными отражающими свойствами позволяет достичь требуемого минимального РЛ контраста К<Кдоп и снижения вероятности его обнаружения (на рис.7б автомобиль со скоростью 37 км/ч на РЛИ фона местности вокруг аэродрома не наблюдается).
К наиболее сильно отражающим фонам в сантиметровом и дециметровом диапазонах РЛ наблюдения для УМ=20÷70° относятся следующие площадные объекты окружающей местности [2, с.329; 12, с.75]:
- промышленные зоны - σФ0=5÷15 дБ=3.2÷30,
- населенные пункты - σФ0=0÷-10 дБ=1÷0.1,
- леса (хвойные - во все сезоны года), кустарники - σФ0=-10÷-15 дБ=0.1÷0.03,
- травяной покров (для см-диапазона) - σФ0=-12÷-15 дБ=0.06÷0.03,
- уклоны рельефа в сторону РЛН, повышающие локальный УМ РЛН.
Например, для КРСА Radarsat-2 в детальном режиме РЛН с разрешением Δ=3 м РЛИ автомобиля (ΔX≈7 м, ΔY≈3.8 м) будет занимать 6 пикселов, поэтому при его максимальном смещении по продольной координате интенсивность отражения по (2) будет KO=0.7σ/N≈0.93. Интенсивность отражения фона типа леса по (3) КФ=σФ0Δ2≈0.9, т.е. интенсивность пикселов фона и смещенного объекта становятся соизмеримыми, а спекл-шум дополнительно маскирует их различие.
Тангенциальная составляющая скорости наземного мобильного объекта VЦY приводит к изменению крутизны линейной частотной модуляции (рис.2, штрихпунктирная линия), поэтому квадратичный фазовый набег на краях синтезируемой апертуры, также как и доплеровский сдвиг от радиальной составляющей скорости, приводит к рассогласованию опорной функции и, следовательно, снижению и расширению отклика КРСА (функции неопределенности) на выходе системы обработки - т.н. расфокусировки РЛИ объекта (рис.7в).
Движение наземного мобильного объекта (рис.4) - навстречу или по направлению полета КРСА АЗЦ=АЗ±90° - приводит к одинаковому эффекту расфокусировки РЛИ объекта (расширению функции неопределенности с одновременным снижением максимума) в соответствии с опорной функцией обработки
В силу малого вклада тангенциальной скорости наземного мобильного объекта в рассогласование опорной функции (VЦ<16.7 м/с при V=7673÷7456 м/с) расфокусировка РЛИ объекта может рассматриваться только в качестве дополнительного эффекта снижения радиолокационного контраста. К источникам расфокусировки РЛИ наземного мобильного объекта относятся также вибрации и угловые колебания элементов при его движении по дороге.
Вышеуказанные площадные объекты местности и участки дорог с требуемой азимутальной ориентацией и качеством покрытия в соответствии с классификатором картографической информации априорно могут быть определены на основе цифровой топографической карты местности на район движения наземного мобильного объекта [14]. Участки разгона наземного мобильного объекта могут выбираться по маршруту движения в соответствии с временным графиком РЛН КРСА. Планирование маршрута перебазирования наземного мобильного объекта осуществляется так, чтобы к моменту РЛН иметь требуемую азимутальную ориентацию, достаточную протяженность участка и качество покрытия дороги для разгона наземного мобильного объекта для реализации максимального эффекта скрытия - при больших значениях УМ РЛН происходит увеличение УЭПР фона и большая расфокусировка, при малых УМ РЛН реализуется большее азимутальное смещение.
К существенным отличиям предлагаемого способа относятся:
1. Расчет моментов времени пролета космического радиолокатора точек минимальной дальности до него от объекта и соответствующих им углов места и азимута направления радиолокационного наблюдения на основе априорно известных географического расположения маршрута движения наземного мобильного объекта, параметров орбиты и параметров ориентации диаграммы направленности антенны космического радиолокатора - для оценки временного графика пролетов и направлений на космический радиолокатор.


B - географическая широта района наблюдения, град,
i - наклонение круговой орбиты космического радиолокатора, град,

γ∈[γmin,γmax] - угол крена диаграммы направленности космического радиолокатора, град,
Н - высота круговой орбиты космического радиолокатора, км,
RЗ=6371 км - средний радиус Земли.
2. Определение участка дорожной сети по маршруту перебазирования наземного мобильного объекта, имеющего достаточную протяженность, качество покрытия и азимутальную ориентацию, близкую к азимуту направления радиолокационного наблюдения в момент пролета космического радиолокатора - для оценки максимума радиальной составляющей скорости наземного мобильного объекта относительно направления радиолокационного наблюдения.
АЗЦ≈АЗ±180° - азимутальная ориентация участка дороги движения наземного мобильного объекта для реализации азимутального смещения его радиолокационного изображения Δу по направлению полета космического радиолокатора, град.
АЗЦ≈АЗ - азимутальная ориентация участка дороги движения наземного мобильного объекта для реализации азимутального смещения его радиолокационного изображения Δy против направления полета космического радиолокатора, град,
3. Определение радиолокационного контраста элементов радиолокационного изображения наземного мобильного объекта и фона окружающей местности вблизи участка дороги на основе априорно известного частотного диапазона, поляризации и разрешающей способности радиолокационного изображения, формируемого космическим радиолокатором, габаритных и отражательных характеристик наземного мобильного объекта и площадных объектов местности, имеющих угловую, частотную, поляризационную, сезонную и метеорологическую зависимость - для оценки требуемого снижения обнаружения и распознавания наземного мобильного объекта.
KO=σ/N, - интенсивность отражения элементов радиолокационного изображения наземного мобильного объекта,
КФ=σФ0Δ2 - интенсивность отражения элементов фона участка окружающей местности,
Кдоп - допустимое значение радиолокационного контраста, обеспечивающего заданное снижение обнаружения и распознавания наземного мобильного объекта,
ΔX,ΔY - габаритные размеры (длина, ширина) наземного мобильного объекта, м,
σ - эффективная площадь рассеяния наземного мобильного объекта,
σФ0 - удельная эффективная площадь рассеяния площадных объектов местности, учитывающая угловую, частотную, поляризационную, сезонную и метеорологическую зависимость.
Δ - разрешающая способность радиолокационного изображения, формируемого космическим радиолокатором, м.
4. Выбор вблизи участка дороги площадного объекта местности, обеспечивающего минимальный радиолокационный контраст наземного мобильного объекта на фоне местности и находящегося на расстоянии вдоль трассы полета космического радиолокатора, не превышающем максимально возможной величины азимутального смещения радиолокационного изображения наземного мобильного объекта относительно участка дороги на основе априорно известной максимальной развиваемой скорости движения наземного мобильного объекта - для оценки возможности смещения радиолокационного изображения объекта на сильно отражающий фон местности.
GM=398600.448 км3/с2 - гравитационная постоянная Земли.
5. Разгон на выбранном участке дороги в требуемом азимутальном направлении и удержание скорости наземного мобильного объекта в момент радиолокационного наблюдения, обеспечивающей смещение его радиолокационного изображения на выбранный участок местности - для обеспечения скрытия наземного мобильного объекта от радиолокационного наблюдения.
Таким образом, данная совокупность последовательных действий предлагаемого способа скрытия наземного мобильного объекта от радиолокационного наблюдения из космоса устраняет недостатки вышеуказанных аналогов и прототипа и обеспечивает снижение уровня обнаружения и распознавания за счет значительного понижения радиолокационного контраста изображения наземного мобильного объекта на фоне радиолокационного изображения участка местности, окружающей дорогу.
ЛИТЕРАТУРА
1. Патент №2178136 Устройство маскировки подвижных объектов, авторы Чеботарев С.И.; Чижов С.В.; Гусаков Н.В.; Кандауров А.А.; Резник А.В.
2. Верба B.C. Обнаружение наземных объектов. Радиолокационные системы обнаружения и наведения воздушного базирования. - М.: Радиотехника, 2007.
3. Верба B.C. и др. Радиолокационные системы землеобзора космического базирования. - М.: Радиотехника, 2010.
4. Афинов В. Направления совершенствования средств РЭП индивидуальной защиты самолетов. - Зарубежное военное обозрение, 1998, №9. - С.37-41
5. Афинов В. Новое направление развития западных средств РЭП индивидуальной защиты самолетов. - Зарубежное военное обозрение, 1999, №7-8-9. - С.37-49, С.39-42, С.34-38
6. Евграфов В. Системы и средства РЭБ самолетов тактической авиации ВС зарубежных государств. - Зарубежное военное обозрение, 2006, №9.
7. Ильчук А.Р., Меркулов В.И., Самарин О.Ф., Юрчик И.А. Влияние интенсивного маневрирования целей на показатели эффективности системы первичной обработки сигналов в бортовых РЛС - Радиотехника. - 2003. - №6. - с.58-63.
8. Тимофеев Г. Сверхманевренность - вопросы остаются. - История авиации, 2001, №4. - С49-61.
9. Патент №2312297 Способ скрытия мобильного наземного объекта от радиолокационного наблюдения из космоса, автор Полетаев A.M.
10. Полетаев A.M. Анализ многомерной функции неопределенности траекторного сигнала радиолокатора с синтезированной апертурой космического базирования. - Информационно-измерительные и управляющие системы, 2010, Т.8, №5. - С.62-71.
11. СНиП 2.05.02-85 Автомобильные дороги. - М.; 2004.
12. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. - М.:, Радиотехника, 2005. - С.305-308, С.75.
13. Радиолокационные станции с цифровым синтезированием апертуры антенны/под ред. В.Т. Горяинова. - М.: Радио и связь, 1988.
14. Классификатор слоев, семантических характеристик, объектов топографических карт масштаба 1:100000. - М.: ЗАО КБ «Панорама», 2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| СПОСОБ ИМИТАЦИИ НАЗЕМНОГО ОБЪЕКТА ПРИ РАДИОЛОКАЦИОННОМ НАБЛЮДЕНИИ | 2006 |
|
RU2310884C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2023 |
|
RU2825020C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2019 |
|
RU2730374C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2021 |
|
RU2794985C2 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОТРАЖАТЕЛЯ В РАДИОЛОКАТОРЕ БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2013 |
|
RU2537788C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
Изобретение относится к области маскировки наземных мобильных объектов от космических систем радиолокационного наблюдения. Способ скрытия наземного мобильного объекта от радиолокационного наблюдения из космоса включает оценку временного графика пролетов и направлений на космический радиолокатор, оценку максимума радиальной составляющей скорости наземного мобильного объекта относительно направления радиолокационного наблюдения, оценку требуемого снижения обнаружения и распознавания наземного мобильного объекта, оценку возможности смещения радиолокационного изображения объекта на сильно отражающий фон местности. Для обеспечения скрытия наземного мобильного объекта от радиолокационного наблюдения осуществляют разгон на выбранном участке дороги в требуемом азимутальном направлении и удержание скорости наземного мобильного объекта в момент радиолокационного наблюдения, обеспечивающей смещение его радиолокационного изображения на выбранный участок местности. Техническим результатом изобретения является снижение уровня обнаружения и распознавания наземного мобильного объекта при радиолокационном наблюдении космическим радиолокатором с высоким пространственным разрешением. 7 ил.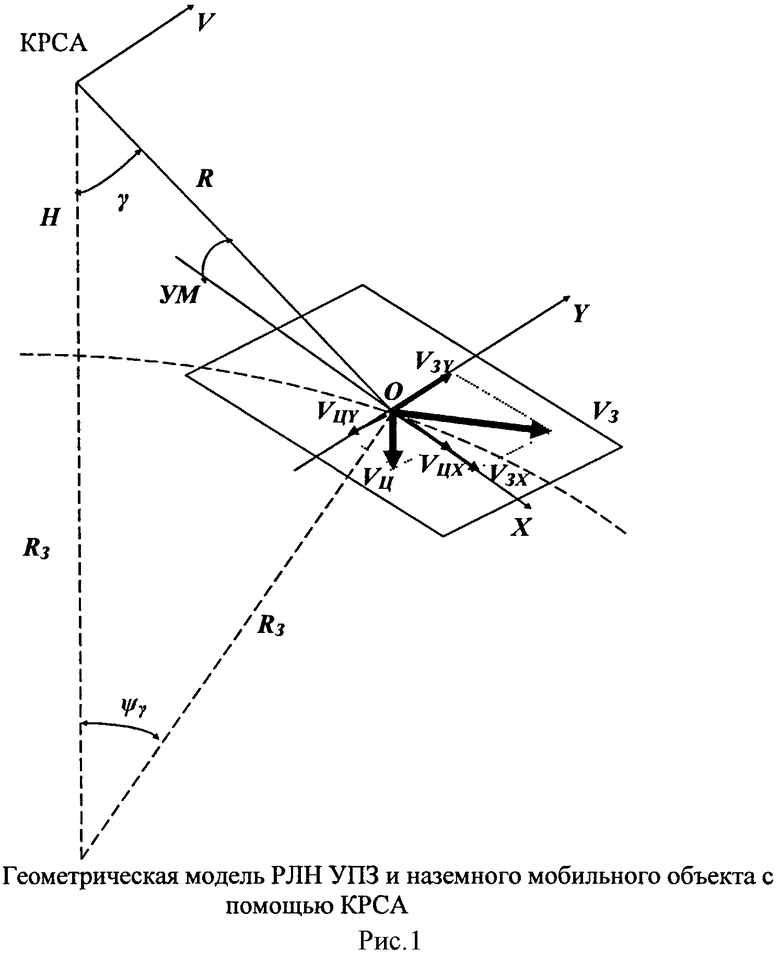
Способ скрытия наземного мобильного объекта от радиолокационного наблюдения из космоса, включающий снижение отражательных характеристик наземного мобильного объекта до уровня отражательных характеристик фона участков окружающей местности, придание доплеровского частотного сдвига отраженному радиолокационному сигналу путем совершения наземным мобильным объектом кратковременного маневра уклонения на интервале радиолокационного наблюдения, отличающийся тем, что рассчитывают моменты времени пролета космического радиолокатора точек минимальной дальности до него от объекта и соответствующие им углы места и азимута направления радиолокационного наблюдения на основе априорно известных географического расположения маршрута движения наземного мобильного объекта, параметров орбиты и параметров ориентации диаграммы направленности антенны космического радиолокатора; определяют участок дорожной сети по маршруту перебазирования наземного мобильного объекта, имеющий достаточную протяженность, качество покрытия и азимутальную ориентацию, близкую к азимуту направления радиолокационного наблюдения в момент пролета космического радиолокатора; определяют радиолокационный контраст элементов радиолокационного изображения наземного мобильного объекта и фона окружающей местности вблизи участка дороги на основе априорно известного частотного диапазона, поляризации и разрешающей способности радиолокационного изображения, формируемого космическим радиолокатором, габаритных и отражательных характеристик наземного мобильного объекта и площадных объектов местности, имеющих угловую, частотную, поляризационную, сезонную и метеорологическую зависимость; выбирают вблизи участка дороги площадной объект местности, обеспечивающий минимальный радиолокационный контраст наземного мобильного объекта на фоне местности и находящийся на расстоянии вдоль трассы полета космического радиолокатора, не превышающем максимально возможной величины азимутального смещения радиолокационного изображения наземного мобильного объекта относительно участка дороги на основе априорно известной максимальной развиваемой скорости движения наземного мобильного объекта; осуществляют разгон на выбранном участке дороги в требуемом азимутальном направлении и удержание скорости наземного мобильного объекта в момент радиолокационного наблюдения, обеспечивающей смещение его радиолокационного изображения на выбранный участок местности.
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| US 4803489 A, 07.02.1989 | |||
| US 5760327 A, 02.06.1998 | |||
| DE 3341069 C1, 16.07.1992. | |||

