Изобретение относится к области радиолокации и может быть использовано при обработке информации, получаемой радиолокаторами с синтезированной апертурой для распознавания надводных кораблей, находящихся на взволнованной морской поверхности.
В настоящее время известны способы распознавания надводных кораблей, основанные на аппарате статистической теории распознавания образов и состоящие из двух этапов 1 - обучения и 2 - экзамена [1]. На этапе обучения происходит формирование эталонных описаний классов кораблей, представляющих собой набор векторов отличительных признаков каждого отдельного класса корабля. Такой набор отличительных признаков формируется путем выделения полезной информации, содержащейся в отраженном от корабля радиолокационном сигнале, а также при анализе радиолокационных изображений (РЛИ) кораблей разных классов, полученных во время сеанса съемки [2, 3]. На втором этапе (экзамена) на основе выбранного решающего правила происходит принятие решения о соответствии наблюдаемых кораблей эталонным классам [3, 4, 5].
Недостатком известных способов является необходимость проведения натурных экспериментов для получения исходного материала, позволяющего сформировать векторы отличительных признаков эталонных классов надводных кораблей. Формирование требуемого полного набора отличительных признаков, путем проведения радиолокационной съемки с вариацией условий наблюдения, приводит к дорогостоящим затратам. Кроме того, само получение адекватных задаче распознавания эталонных изображений объектов не всегда бывает возможно, например, при воздействии морского волнения, которое приводит к искажениям РЛИ надводных кораблей [6].
Технический результат, который может быть получен при осуществлении настоящего способа, заключается в возможности производить распознавание надводных кораблей, находящихся на взволнованной морской поверхности, и снижении затрат формирования отличительных признаков эталонных классов надводных кораблей.
Указанный технический результат достигается тем, что на этапе обучения, формирование векторов отличительных признаков эталонных классов кораблей происходит по моделям радиолокационных изображений кораблей, полученных из комплексных точечных моделей (КТМ) с учетом параметров радиолокатора, влияния качки и рысканья корабля. Исходные КТМ формируются из реальных изображений кораблей известных классов, полученных при контролируемых условиях морского волнения (в бухте, на стоянке) в ходе натурных испытаний космических аппаратов (КА), оснащенных радиолокаторами с синтезированной апертурой антенны (РСА) [7, 8].
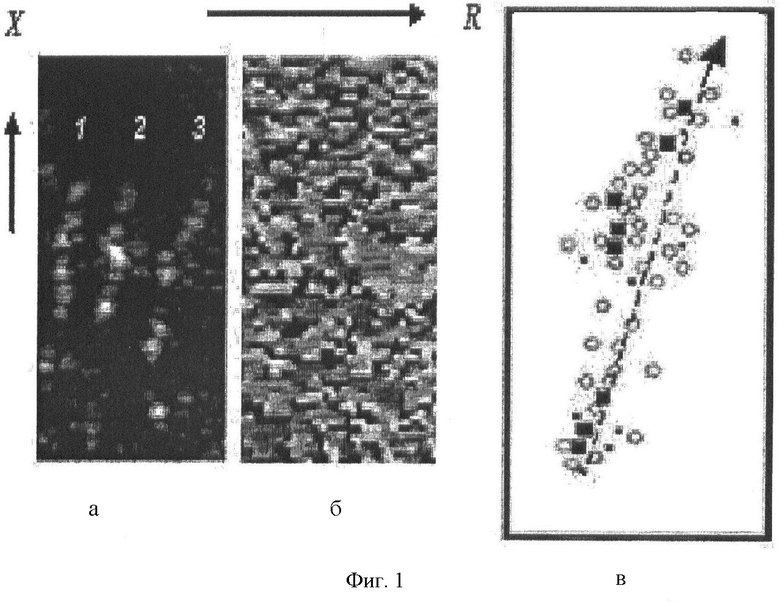
Формирование КТМ моделей кораблей осуществляется следующим образом. Предварительно происходит отделение пикселей, принадлежащих непосредственно объекту (кораблю), от элементов окружающего объект фона (морской поверхности). Затем на полученном радиолокационном изображении корабля последовательно выделяются локальные источники отражения [9]. Выделенные локальные источники отражения представляются в виде точечных отражателей с соответствующими значениями амплитуды и фазы. На фиг.1 представлен пример последовательного построения КТМ большого противолодочного корабля (БПК). На фиг.1а изображено исходное РЛИ кораблей, находящихся на стоянке, полученное с РСА «Меч - КУ» КА «Алмаз-1» [7, 8], где R - это направление по дальности, Х - направление по азимуту. Цифрами 1-3 обозначены классы кораблей, так 1 и 3 - это БПК проекта 1134-б, 2 - малый противолодочный корабль проекта 1241. В передней части изображения видны элементы причала. На фиг.1б представлено фазовое изображение исходного РЛИ. Фиг.1в иллюстрирует КТМ корабля, изображенного на фиг.1а под номером 3. Интересующий корабль был предварительно выделен из общего РЛИ. Каждой точке КТМ присваивается значение высоты надстройки по чертежам и/или оптическим снимкам кораблей. Таким образом, получается трехмерная комплексная точечная модель.
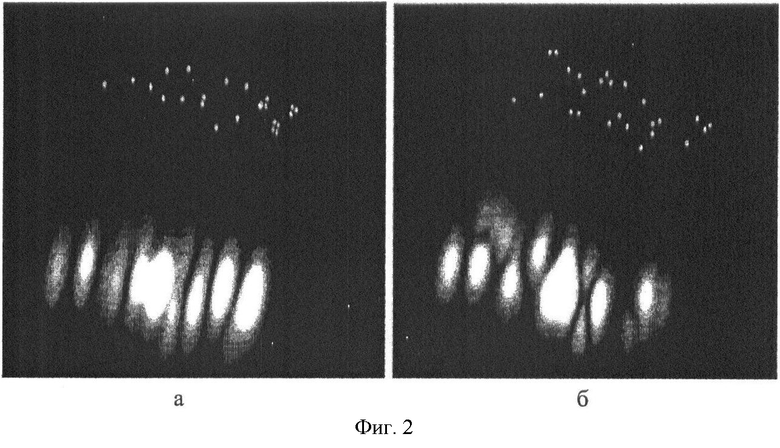
Для учета искажений изображений, вызванных качкой и рысканьем [6], задают набор исходных воздействий для разной балльности моря, формируют искаженное РЛИ и вычисляют набор векторов отличительных признаков эталонных классов. На фиг.2а, 2б приведен пример формирования КТМ для БПК проекта 1134-б БПК.
Так на фиг.2а сверху приведена рассчитанная КТМ корабля, а снизу - восстановленное по нему радиолокационное изображение при разрешающей способности РСА - 15 м. На фиг.2б сверху представлена КТМ корабля, в которой произведен учет смещения отражающих элементов корабля при съемке радиолокатором с синтезированной апертурой антенны, возникающих в результате качки, для случая, когда отклонение при боковой качке составляет 10° на сторону. Снизу - восстановленное по нему радиолокационное изображение. Видны искажения радиолокационного изображения корабля.
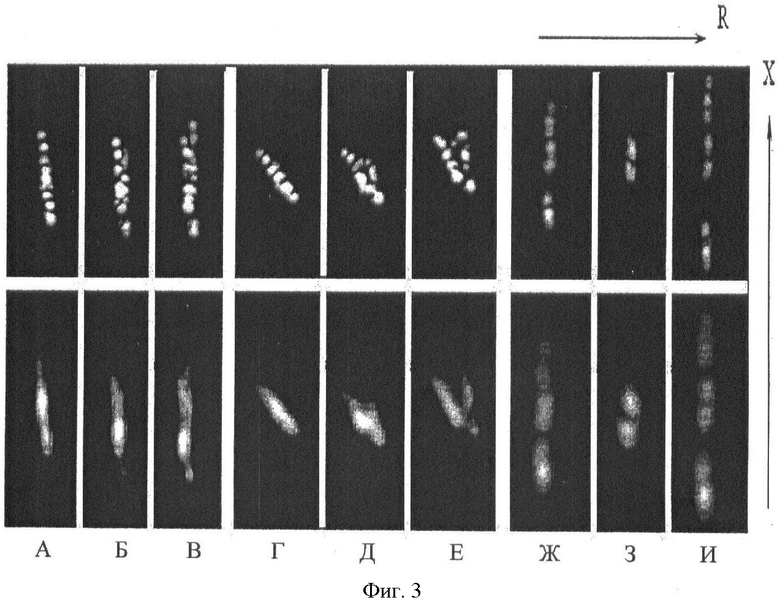
На фиг.3 представлены РЛИ надводных кораблей для различных случаев условий наблюдения, таких как разрешающая способность РСА - верхний ряд - 15 м и нижний ряд - 35 м; ракурса наблюдения 283° (А - В), 315° (Г - Е) и 270° (Ж - И); отсутствия качки (А, Г, Ж) и наличия боковой качки 10° на сторону (Б и Д) и 15° на сторону (В и Е), а также при совместном воздействии килевой качки и рысканья ±7° (З, И), где R - это направление по дальности, Х - направление по азимуту.
Описываемый способ позволяет проводить распознавание надводных кораблей, находящихся на взволнованной морской поверхности, по их радиолокационным изображениям. Тем самым повысить информативность космических радиолокаторов с синтезированной апертурой антенны.
Источники информации
1. Я.А.Фомин, Г.Р.Тарловский. Статистическая теория распознавания образов. - М.: Радио и связь, 1986.
2. Hossam Osman, Li Раnу, Steven D. Blosteiny and Langis Gagnonz. Classification of Ships in Airborne SAR Imagery Using Backpropagation Neural Networks // Radar Processing, Technology and Applications II, Proc. SPIE #3161, 1997.
3. М.Ю.Достовалов, Внотченко С.Л., Лифанов А.С., Мусинянц Т.Г. Система автоматизированного распознавания объектов на основе исследования радиолокационных портретов по изображениям РСА КОМПАКТ-100. Исследования Земли из космоса, №1, 2005.
4. Diemunsch J., Wissinger J. MSTAR model-based automatic target recognition: search technology for a robust ATR. Algorithms for Synthetic Aperture Radar Imagery V, E. Zeinio, Eds. // Proceedings of SPIE, Vol.3370, 1998.
5. Я.Д.Ширман, С.А.Горшков, С.П.Лещенко, Г.Д.Братченко, В.М.Орленко. Методы радиолокационного распознавания и их моделирование. Зарубежная радиоэлектроника. №11, 1996.
6. Радиолокационные станции обзора Земли. Кондратенков Г.С. Потехин В.А., Реутов А.П., Феоктистов Ю.А. /Под ред. Кондратенкова Г.С. - М.: Радио и связь, 1983.
7. Каталог изображений Земли. Продукция космического аппарата «Алмаз-1». ОАО «НПО машиностроения». Вэб-сайт http://almaz1.ru/
8. Дикинис А.В., Иванов А.Ю., Карлин Л.Н., Неронский Л.Б. и др. Атлас аннотированных радиолокационных изображений морской поверхности, полученных космическим аппаратом «Алмаз - 1». - М.: ГЕОС, 1999.
9. Штагер Е.А., Чаевский Е.В. Рассеяние волн на телах сложной формы. - М.: Сов. радио, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И АЗИМУТАЛЬНОЙ КООРДИНАТЫ НАДВОДНЫХ ЦЕЛЕЙ РАДИОЛОКАТОРАМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2014 |
|
RU2566662C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КОРАБЛЕЙ | 2016 |
|
RU2638939C1 |
| Способ быстрого имитирования радиолокационных изображений | 2024 |
|
RU2835989C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОБЪЕКТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ В РАДИОЛОКАТОРЕ С СИНТЕЗИРОВАННОЙ АПЕРАТУРОЙ АНТЕННЫ | 1994 |
|
RU2101727C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ ПРИ СБЛИЖЕНИИ ДЛЯ ВСТРЕЧИ С ОБЪЕКТОМ | 2009 |
|
RU2419108C1 |
| Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям | 2015 |
|
RU2620727C2 |
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| Способ измерения кратковременных смещений на поверхности Земли | 2024 |
|
RU2837515C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ НАЗЕМНЫХ ОБЪЕКТОВ РАДИОЛОКАТОРОМ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2006 |
|
RU2308050C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
Способ распознавания надводных кораблей основан на сопоставлении информативных признаков наблюдаемых кораблей, полученных по их радиолокационным изображениям с эталонными признаками, соответствующими определенным классам надводных кораблей. Сущность способа заключается в том, что формирование эталонных признаков, соответствующих определенным классам надводных кораблей, производится по изображениям, сформированным на основе ограниченного набора реальных радиолокационных изображений кораблей известных классов с преобразованием их в комплексную точечную трехмерную модель, с ее коррекцией по фотоснимкам или чертежам корабля и математическим моделированием, позволяющим описать радиолокационные изображения известных классов кораблей с учетом параметров радиолокатора, вариаций условий наблюдения, влияния качки и рысканья корабля при движении на взволнованной морской поверхности. Достигаемый технический результат - распознавание надводных кораблей на взволнованной морской поверхности, снижение затрат формирования отличительных признаков эталонных классов надводных кораблей. 3 ил.
Способ распознавания надводных кораблей, находящихся на взволнованной морской поверхности, заключающийся в получении радиолокационного изображения (РЛИ) наблюдаемого объекта, сопоставление его информационных признаков с эталонными признаками надводных кораблей определенного класса, отличающийся тем, что в качестве модели для сопоставления информационных признаков используется РЛИ реальных надводных кораблей известных классов, полученных при контролируемых условиях морского волнения, при этом из полученного РЛИ надводного корабля, выделяют локальные источники отражения, определяют координаты центров данных источников в пределах границ корабля, значение амплитуды и фазы, записывают их в массив, для каждого класса кораблей по этим данным формируют комплексную точечную модель (КТМ) с координатами центров рассеивания отраженных сигналов, записанных в массиве, при этом каждой точке КТМ присваивается значение высоты надстроек согласно распределению высот и интенсивности отражающих элементов эталонных кораблей, рассчитываются величины смещения отражателей корабля, для всевозможного набора состояний морской поверхности, их значения вводятся в полученную трехмерную КТМ, а затем производят восстановление радиолокационного изображения.
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОБЪЕКТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ В РАДИОЛОКАТОРЕ С СИНТЕЗИРОВАННОЙ АПЕРАТУРОЙ АНТЕННЫ | 1994 |
|
RU2101727C1 |
| Способ получения керамических масс и изделий | 1949 |
|
SU78331A2 |
| US 5784026 A, 21.07.1998 | |||
| WO 0248655 A2, 20.06.2002 | |||
| US 6802236 B1, 12.10.2004. | |||

