Изобретение относится к области радиолокации и может быть использовано при обработке информации, получаемой радиолокаторами с синтезированной апертурой для измерения скорости и азимутальной координаты надводных целей.
В настоящее время известны способы измерения скорости и азимутальной координаты надводных целей с помощью разнесенных передающей и приемной позиций. Что возможно либо при бистатическом построении (тандеме) радиолокационной системы [1], где в качестве передающей позиции используется один радиолокатор с синтезированной апертурой антенны (РСА), а в качестве приемной - смещенный относительной передающего РСА другой, либо в случае, когда приемная и передающая позиции организованы путем реализации двулучевой антенны, как это показано в [2].
Недостатком данных способов является трудоемкость и высокая стоимость реализации.
Еще один известный способ определения скорости объекта по радиолокационному изображению в радиолокаторе с синтезированной апертурой антенны, представленный в патенте на изобретение №2101727, имеет недостаток в том, что применить его можно только в случае работы РСА в картографическом режиме. Тогда, когда получаемое радиолокационное изображение (РЛИ) имеет сверхвысокое разрешение (видны кильватерные следы).
Целью настоящего изобретения является способ, с помощью которого производится измерение скорости и азимутальной координаты надводных целей при съемке радиолокаторами с синтезированной апертурой антенны.
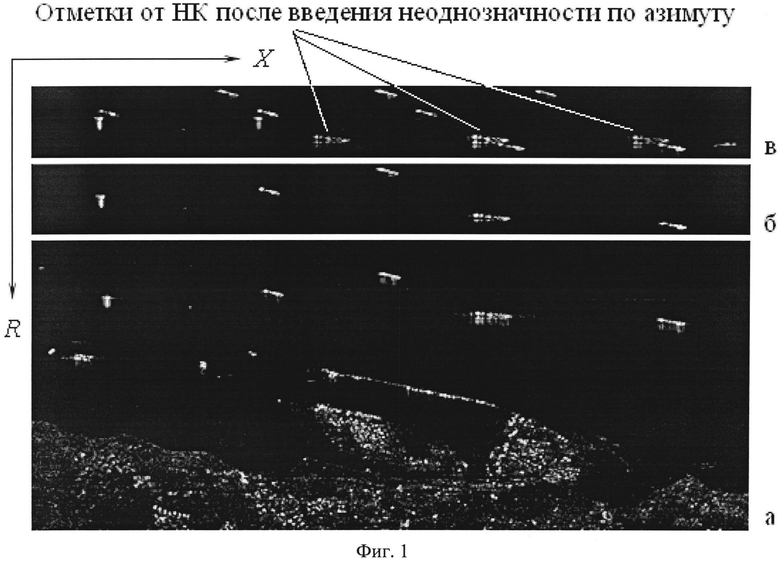
Это достигается тем, что синтез РЛИ проводится с частотой ниже частоты повторения зондирующего сигнала, что приводит к появлению на РЛИ неоднозначности по азимуту. Проявление неоднозначности по азимуту, введенной искусственным путем, демонстрируется на фиг 1, в. На фиг. 1, а показано исходное РЛИ, сделанное в районе пролива Гибралтар порт Сеута в обычном маршрутном режиме съемки РСА «Меч-КУ» КА «Алмаз-1». На фиг. 1, б выделен фрагмент исходного РЛИ.
Далее происходит отделение пикселей, принадлежащих непосредственно цели, от элементов окружающего объект фона (морской поверхности). Затем, на полученном радиолокационном изображении цели выделяются точечные отражатели - локальные источники отраженного поля, образующиеся в результате отражения зондирующего сигнала от элементов конструкции [3], и на этом месте ставиться точка. Координаты центров данных источников в пределах границ цели, а также значения их амплитуды и фазы записываются в массив. В результате моделирования по радиолокационному изображению каждой обнаруженной цели формируются комплексные точечные модели (КТМ), в которых каждая точка есть локальный отражатель цели, имеющий координаты центра рассеивания отраженного сигнала [4, 5].
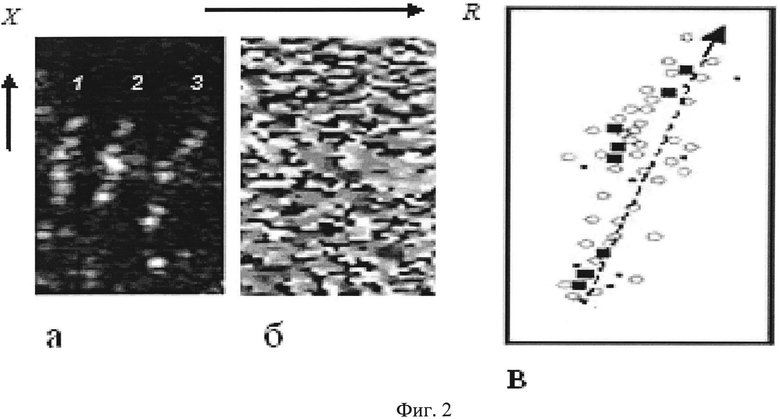
Процесс выделения точечных отражателей на примере надводных кораблей (НК) иллюстрируется фиг. 2. На фиг. 2, а представлено исходное радиолокационное изображения кораблей, находящихся на стоянке, получено с РСА «Меч-КУ» КА «Алмаз-1» [6, 7]. Цифрами 1-3 обозначены классы кораблей, так 1 и 3 - это большие противолодочные корабли (БПК) проекта 1134-б, 2 - малый противолодочный корабль проекта 1241. В передней части изображения видны элементы причала. На фиг. 2, б представлено фазовое изображение исходного РЛИ. Фиг. 2, в иллюстрирует КТМ корабля, изображенного на фиг. 2, а под номером 3. Интересующий корабль был предварительно выделен из общего РЛИ. Измеренная суммарная величина эффективной поверхности рассеивания (ЭПР) корабля 3 составляет 7360 м2, максимальная ЭПР локального источника отражения 820 м2, уровни ЭПР на фиг. 2, в: «■» - выше 200 м2, «Ο» - 50 м2, «•» - 12 м2. Пунктирной линией со стрелкой на точечной модели показана продольная ось корабля.
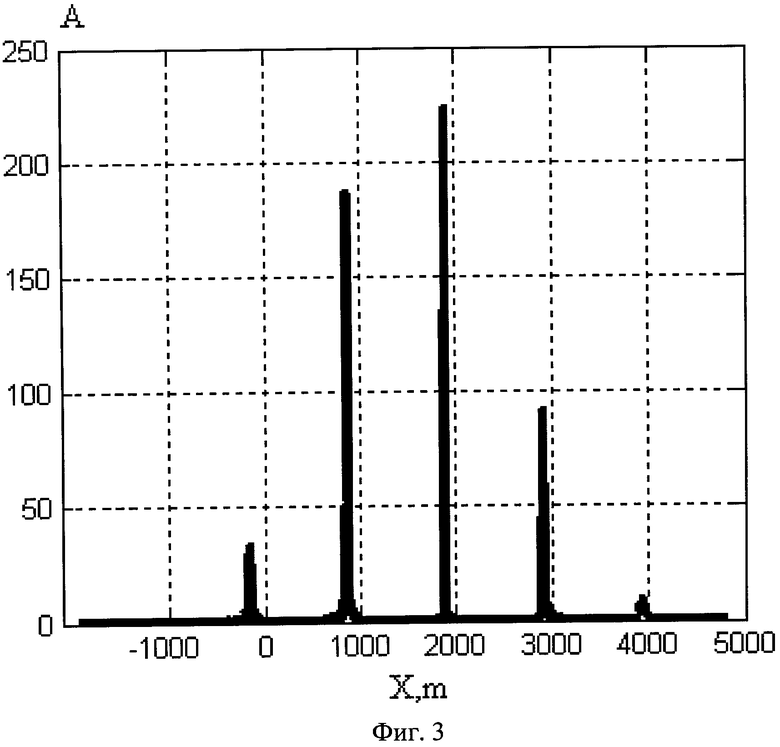
Для движущейся цели (например, надводного корабля) отклик от точечных отражателей этой цели, полученный по РЛИ с введенной искусственной неоднозначностью по азимуту, будет несимметричным со смещением, пропорциональным скорости цели фиг. 3, амплитудное распределение данного отклика будет зависеть от формы диаграммы направленности антенны.
Описываемый способ позволяет проводить измерение скорости и азимутальной координаты надводных целей по РЛИ, тем самым повысить информативность космических радиолокаторов с синтезированной апертурой антенны.
Литература
1. Frieder H., Krieger G., Werner M., Reiniger К., Eineder M., D'Amico S., Erhardt D., Wickler M. TanDEM-X Mission Design and Data Acquisition Plan // Proc. of EUSAR'2008, Friedrichshafen, Germany. June 2-5 2008. V. 4. P. 43-46.
2. Neronskiy L., Osipov I., Verba V. Modelling of Space- Frequency Filtering Method for Moving Target Indication in SAR // Proc. of EUSAR′2006, Dresden, Germany. June 16-18 2006.
3. Штагер Ε.Α., Чаевский Е.В. Рассеяние волн на телах сложной формы. - М.: Сов. радио, 1974.
4. Верба B.C., Неронский Л.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы землеобзора космического базирования. Под общей ред. B.C. Вербы. - М.: Радиотехника, 2010.
5. Неронский Л.Б., Верба B.C., Лиханский С.Г., Осипов И.Г., Пущинский CH., Турук В.Э. Формирование точечных моделей объектов по комплексным РСА изображениям // Труды седьмой Всероссийской открытой ежегодной конференции "Современные проблемы дистанционного зондирования Земли из космоса". - М.: ИКИ РАН, 2009.
6. Каталог изображений Земли. Продукция космического аппарата «Алмаз-1». ОАО «НПО машиностроения». Вэб-сайт http://almazl.ru/
7. Дикинис А.В., Иванов А.Ю., Карлин Л.Н., Неронский Л.Б., и др. Атлас аннотированных радиолокационных изображений морской поверхности, полученных космическим аппаратом «Алмаз - 1». - М.: ГЕОС, 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА ИМПУЛЬСНОГО КОГЕРЕНТНОГО РАДИОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2229728C1 |
| КОСМИЧЕСКИЙ МНОГОРЕЖИМНЫЙ ПОЛЯРИМЕТРИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ СО СКАНИРУЮЩЕЙ ЗЕРКАЛЬНОЙ АНТЕННОЙ | 2006 |
|
RU2310886C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРНОГО ПОЛЯ СКОРОСТИ ОКЕАНСКИХ И РЕЧНЫХ ТЕЧЕНИЙ В КОСМИЧЕСКОМ РСА | 2015 |
|
RU2597148C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОТРАЖАТЕЛЯ В РАДИОЛОКАТОРЕ БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2013 |
|
RU2537788C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОБЪЕКТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ В РАДИОЛОКАТОРЕ С СИНТЕЗИРОВАННОЙ АПЕРАТУРОЙ АНТЕННЫ | 1994 |
|
RU2101727C1 |
| Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны | 2019 |
|
RU2707556C1 |
| Способ измерения кратковременных смещений на поверхности Земли | 2024 |
|
RU2837515C1 |
Изобретение относится к области радиолокации и может быть использовано при обработке информации, получаемой радиолокаторами с синтезированной апертурой для измерения скорости и азимутальной координаты надводных кораблей. Достигаемый технический результат - обеспечение измерения скорости и азимутальной координаты надводных целей при съемке радиолокаторами с синтезированной апертурой антенны. Способ основан на измерении поправки к частоте Доплера и заключается в том, что измерение поправки к частоте Доплера осуществляется по отклику точечных отражателей надводных кораблей, полученных по радиолокационному изображению (РЛИ) с искусственно введенной неоднозначностью по азимуту, что достигается синтезом РЛИ с частотой ниже частоты повторения зондирующего сигнала. 3 ил.
Способ измерения скорости и азимутальной координаты надводных целей, основанный на измерении поправки к частоте Доплера, отличающийся тем, что измерение поправки к частоте Доплера осуществляется по отклику точечных отражателей целей, полученных по радиолокационному изображению (РЛИ) с искусственно введенной неоднозначностью по азимуту, что достигается синтезом РЛИ с частотой ниже частоты повторения зондирующего сигнала.
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2492504C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ПРЕДНАМЕРЕННЫМ СИГНАЛОМ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ | 2006 |
|
RU2407027C2 |
| US 5539408 A, 23.09.1996 | |||
| US 5325097 A, 27.06.2005 | |||
| US 2012169532 A1, 05.07.2012 | |||
| US 4660040 A, 21.04.1987 | |||

