Изобретение относится к радиолокации и может быть использовано при применении картографических радиолокаторов с синтезированной апертурой антенны (РСА).
Известен эффект смещения по продольной (азимутальной) координате изобретения движущегося объекта на радиолокационном изображении (РЛИ) участка поверхности, полученном с помощью РСА в режиме картографирования поверхности [1] на котором основан способ определения скорости объекта по РЛИ наблюдаемого участка поверхности, заключающийся в формировании с помощью РСА в режиме картографирования РЛИ участка поверхности с движущимся объектом, измерении РЛИ смещения Δy по продольной координате изображения объекта относительно отметки его истинного положения, вычислении радиальной составляющей скорости объекта по формуле [2]
где V скорость носителя РСА;
θo угол наблюдения, отсчитываемый в плоскости визирования РСА от перпендикуляра к вектору скорости носителя РСА до направления на объект в середине интервала синтезирования;
R(θo) расстояние до объекта в середине интервала синтезирования;
и определении вектора скорости  объекта с помощью следующих отношений: V0 ≥V02
объекта с помощью следующих отношений: V0 ≥V02
где V0 модуль вектора скорости объекта;
α курс объекта относительно направления движения носителя РСА в плоскости РЛИ;
Указанный способ прост и позволяет оценивать скорость объекта, движущегося на фоне подстилающей поверхности, по РЛИ участка поверхности, полученному с помощью РСА в режиме картографирования поверхности, однако обеспечивает низкую достоверность определения вектора скорости объекта.
Целью изобретения является повышение достоверности определения вектора скорости надводного корабля.
Поставленная цель достигается тем, что по сравнению со способом - прототипом, включающим формирование с помощью РСА в режиме картографирования РЛИ участка поверхности с движущимся объектом, в предполагаемом способе на РЛИ участка водной поверхности измеряют смещение Δy по продольной координате y изображения корабля относительно начала изображения его корабельного следа и измеряют угол α между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа, а модуль Vk вектора скорости корабля вычисляют по формуле
где  радиальная составляющая скорости корабля в середине интервала синтезирования;
радиальная составляющая скорости корабля в середине интервала синтезирования;
ψ угол, образованный вектором  скорости корабля и плоскостью визирования; определяется с помощью соотношения tgψ = tgψosinα где ψo угол пересечения плоскости визирования и наблюдаемого участка поверхности.
скорости корабля и плоскостью визирования; определяется с помощью соотношения tgψ = tgψosinα где ψo угол пересечения плоскости визирования и наблюдаемого участка поверхности.
В качестве касательной к началу оси изображения корабельного следа используют:
касательную к началу изображения кильваторного следа корабля;
биссектрису угла между касательными к началам изображений расходящихся ветвей огибающей Кельвиновских волн.
С помощью РСА в режиме картографирования в результате согласованной обработки отраженных от элементов неподвижной поверхности сигналов формируют двумерное РЛИ наблюдаемого участка поверхности в координатах: азимут θ или продольная дальность y, параллельная вектору  носителя РСА, и перпендикулярная ей наклонная дальность х (фиг.1). При этом сигналы, отраженные от объектов, движущихся относительно поверхности, будут обработаны несогласованно, вследствие чего изображение движущегося объекта на РЛИ участка поверхности сместится относительно его истинного положения по азимуту на угол
носителя РСА, и перпендикулярная ей наклонная дальность х (фиг.1). При этом сигналы, отраженные от объектов, движущихся относительно поверхности, будут обработаны несогласованно, вследствие чего изображение движущегося объекта на РЛИ участка поверхности сместится относительно его истинного положения по азимуту на угол
или по продольной координате y на величину
а истинное положение объекта проявится в виде отметки с пониженным уровнем интенсивности сигнала по сравнению с уровнем сигнала поверхности [3] Поэтому, измерив расстояние по продольной оси y между центрами изображения объекта и отметкой истинного положения, т. е. смещение Δy с помощью (5) определяют радиальную составляющую вектора  скорости объекта:
скорости объекта:
Наличие смещения Δy по продольной координате изображения объекта относительно отметки его истинного положения на РЛИ участка поверхности свидетельствует о том, что наблюдаемый объект движения и вектор его скорости  удовлетворяют соотношениям (2). Однако эти соотношения определяют только граничные значения модуля V0 скорости и угла α характеризующего направление движения объекта, и поэтому обеспечивают низкую достоверность определения вектора
удовлетворяют соотношениям (2). Однако эти соотношения определяют только граничные значения модуля V0 скорости и угла α характеризующего направление движения объекта, и поэтому обеспечивают низкую достоверность определения вектора  скорости объекта. С целью повышения достоверности определения вектора скорости надводного корабля по РЛИ участка водной поверхности предлагается для определения курса α надводного корабля использовать информацию, содержащуюся в изображении его корабельного следа. Надводный корабль при движении по водной поверхности воздействует своим корпусом на поверхностный водный слой и образует несколько видов волн: носовые, кормовые, вихревые и внутренние, которые распространяются в воде по обе стороны корпуса и за кормой корабля и, модулируя естественное волнение поверхности, формируют корабельный след, компоненты которого группируются вдоль и по оси следа, повторяющей траекторию движения корабля [4, 5] Ориентация оси корабельного следа в каждой точке соответствует направлению вектора скорости корабля, т. е. его курсу относительно направления движения носителя РСА. Изображение корабельного следа на РЛИ участка водной поверхности, полученном с помощью РСА, характеризуется рядом отличительных признаков, проявляющихся в закономерном чередовании участков и полос с увеличенным и уменьшенным уровнем по сравнению с уровнем естественной водной поверхности сигнала РЛИ (более светлых и более темных полос на позитивном РЛИ) и позволяющих идентифицировать компоненты корабельного следа [4 7]
скорости объекта. С целью повышения достоверности определения вектора скорости надводного корабля по РЛИ участка водной поверхности предлагается для определения курса α надводного корабля использовать информацию, содержащуюся в изображении его корабельного следа. Надводный корабль при движении по водной поверхности воздействует своим корпусом на поверхностный водный слой и образует несколько видов волн: носовые, кормовые, вихревые и внутренние, которые распространяются в воде по обе стороны корпуса и за кормой корабля и, модулируя естественное волнение поверхности, формируют корабельный след, компоненты которого группируются вдоль и по оси следа, повторяющей траекторию движения корабля [4, 5] Ориентация оси корабельного следа в каждой точке соответствует направлению вектора скорости корабля, т. е. его курсу относительно направления движения носителя РСА. Изображение корабельного следа на РЛИ участка водной поверхности, полученном с помощью РСА, характеризуется рядом отличительных признаков, проявляющихся в закономерном чередовании участков и полос с увеличенным и уменьшенным уровнем по сравнению с уровнем естественной водной поверхности сигнала РЛИ (более светлых и более темных полос на позитивном РЛИ) и позволяющих идентифицировать компоненты корабельного следа [4 7]
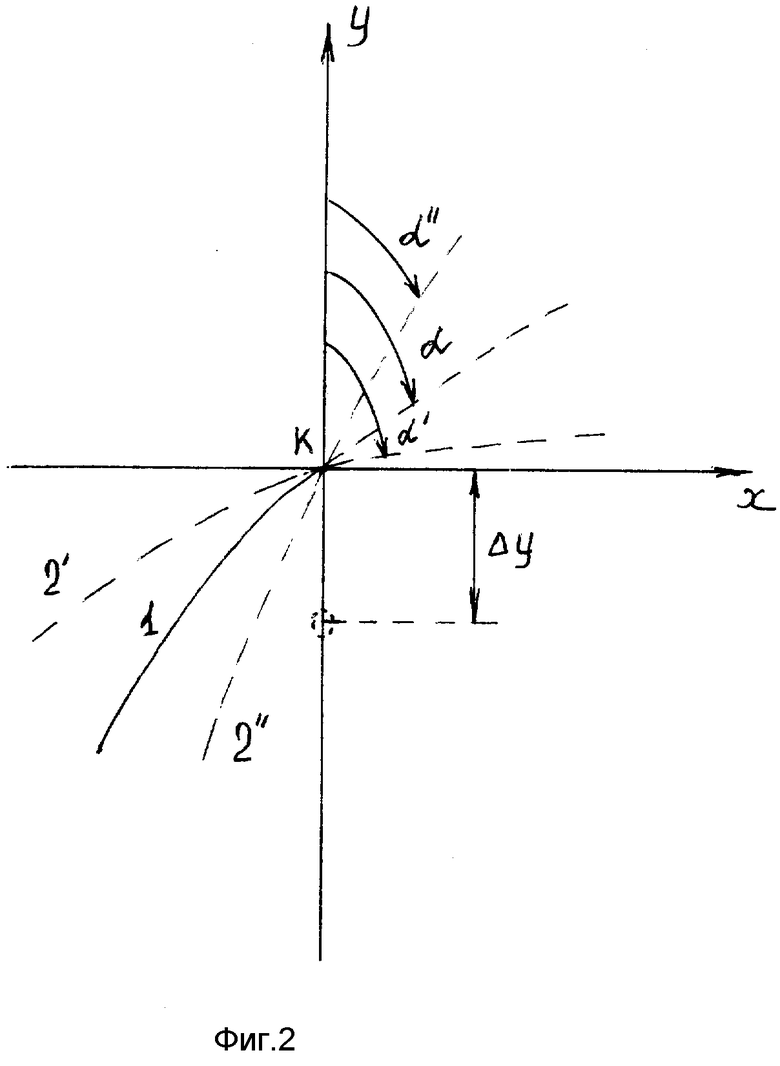
На сформированном с помощью РСА в режиме картографирования РЛИ участка водной поверхности измеряют смещение Dy по продольной координате y изображения корабля относительно начала изображения его корабельного следа, местоположение которого естественным образом совпадает с истинным положением движущегося корабля на РЛИ участка водной поверхности, и измеряют угол  между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа /фиг. 1, 2/. На фиг. 1, 2 обозначены: Р носитель РСА; К - движущийся корабль; 1 изображение кильватерного следа; 2 и 2" изображения расходящихся ветвей огибающей Кельвиновский волн. Измеренные величины Dy и α дают возможность однозначно вычислить вектор
между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа /фиг. 1, 2/. На фиг. 1, 2 обозначены: Р носитель РСА; К - движущийся корабль; 1 изображение кильватерного следа; 2 и 2" изображения расходящихся ветвей огибающей Кельвиновский волн. Измеренные величины Dy и α дают возможность однозначно вычислить вектор  скорости корабля по формулам (3), полученным из известных соотношений /2, фиг. 1, 2/:
скорости корабля по формулам (3), полученным из известных соотношений /2, фиг. 1, 2/:
Угол α в (6) зависит от углов a и ψo и вычисляется по формуле
tgψ = tgψosinα. (7)
Угол α отсчитывается от продольной оси y РЛИ по часовой стрелке и показывает направление движения корабля в плоскости РЛИ относительно направления движения носителя РСА. Курс aк корабля в плоскости водной поверхности (фиг. 1) по величине отличается от угла α и определяется с помощью выражения
Очевидно, что модуль Vк и курс αк однозначно определяют вектор  скорости движения корабля по водной поверхности. Основными и наиболее наблюдаемыми для РСА компонентами корабельного следа являются кильваторный след и огибающая Кельвиновских волн [4 9] Возникновение кильватерного следа обусловлено взаимодействием подводной части корпуса корабля с водой, в результате которого образуются горизонтальные гидродинамические вихри, которые "срываются" с кормы движущегося корабля в виде вихревых волн и модулируют естественный спектр морского волнения, приводя к его трансформации в поле течений за кораблем. Результатом трансформации спектра естественного волнения является "выглаживание" водной поверхности в области взаимодействия вихревых волн с водой, которая и образует кильваторный след движущегося надводного корабля. Кильваторный след простирается непосредственно за кормой корабля, повторяя его траекторию в виде полосы воды, "выбеленной" по сравнению с окружающей естественной водной поверхностью, и по сути является осью корабельного следа. На РЛИ участка водной поверхности с движущимся кораблем, полученным с помощью РСА в режиме картографирования, кильватерный след появляется в виде незначительно расширяющейся по мере удаления от корабля более темной полосы по сравнению с окружающим фоном поверхности [6, 8, 9] На границе темной полосы кильваторного следа на РЛИ часто наблюдается яркая линия, вызванная более интенсивным обратным рассеянием зондирующего сигнала РСА по обращенной к ветру части границы следа [6, 9] Начало кильваторного следа соответствует началу всего корабельного следа и истинному положению корабля на РЛИ. Учитывая свойства кильваторного следа, для определения угла в качестве касательной к началу оси изображения корабельного следа используют касательную к началу изображения кильватерного следа /фиг. 2/. Кельвиновские волны образуются в результате распространения по водной поверхности носовых волн по обе стороны от корпуса движущегося корабля. Огибающая Кельвиновских волн является V-образным следом, расходящимся от носа корабля по обе стороны корпуса под углом ± 19,5o к вектору
скорости движения корабля по водной поверхности. Основными и наиболее наблюдаемыми для РСА компонентами корабельного следа являются кильваторный след и огибающая Кельвиновских волн [4 9] Возникновение кильватерного следа обусловлено взаимодействием подводной части корпуса корабля с водой, в результате которого образуются горизонтальные гидродинамические вихри, которые "срываются" с кормы движущегося корабля в виде вихревых волн и модулируют естественный спектр морского волнения, приводя к его трансформации в поле течений за кораблем. Результатом трансформации спектра естественного волнения является "выглаживание" водной поверхности в области взаимодействия вихревых волн с водой, которая и образует кильваторный след движущегося надводного корабля. Кильваторный след простирается непосредственно за кормой корабля, повторяя его траекторию в виде полосы воды, "выбеленной" по сравнению с окружающей естественной водной поверхностью, и по сути является осью корабельного следа. На РЛИ участка водной поверхности с движущимся кораблем, полученным с помощью РСА в режиме картографирования, кильватерный след появляется в виде незначительно расширяющейся по мере удаления от корабля более темной полосы по сравнению с окружающим фоном поверхности [6, 8, 9] На границе темной полосы кильваторного следа на РЛИ часто наблюдается яркая линия, вызванная более интенсивным обратным рассеянием зондирующего сигнала РСА по обращенной к ветру части границы следа [6, 9] Начало кильваторного следа соответствует началу всего корабельного следа и истинному положению корабля на РЛИ. Учитывая свойства кильваторного следа, для определения угла в качестве касательной к началу оси изображения корабельного следа используют касательную к началу изображения кильватерного следа /фиг. 2/. Кельвиновские волны образуются в результате распространения по водной поверхности носовых волн по обе стороны от корпуса движущегося корабля. Огибающая Кельвиновских волн является V-образным следом, расходящимся от носа корабля по обе стороны корпуса под углом ± 19,5o к вектору  скорости корабля [4, 5] На РЛИ огибающая Кельвиновских волн проявляется в виде расходящихся от начала корабельного следа более светлых по сравнению с фоном окружающей водной поверхности полос [5, 6, 8: фиг. 2] Поэтому для определения угла α в качестве касательной к началу оси корабельного следа используют биссектрису угла между касательными к началам изображений расходящихся ветвей огибающей Кельвиновских волн (
скорости корабля [4, 5] На РЛИ огибающая Кельвиновских волн проявляется в виде расходящихся от начала корабельного следа более светлых по сравнению с фоном окружающей водной поверхности полос [5, 6, 8: фиг. 2] Поэтому для определения угла α в качестве касательной к началу оси корабельного следа используют биссектрису угла между касательными к началам изображений расходящихся ветвей огибающей Кельвиновских волн ( , фиг. 2).
, фиг. 2).
Описанный способ может быть реализован с помощью любого РСА, осуществляющего картографирование участка поверхности Земли. Например, с помощью РСА (2), в состав которого входят антенно-фидерный и приемо-передающий тракты и системы управления, обработки (синтеза РЛИ) и отображения, формируют РЛИ участка водной поверхности с движущимся надводным кораблем в координатах продольная наклонная дальность (координаты y, x), на РЛИ участка водной поверхности, выведенном на систему отображения, измеряют смещение Δy по продольной координате y изображения корабля относительно начала изображения его корабельного следа и измеряют угол α между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа. Ось изображения корабельного следа определяют по характерным особенностям изображений компонент следа, например, в качестве касательной к началу оси изображения корабельного следа используют:
касательную к началу изображения кильватерного следа корабля;
биссектрису угла между касательными к началам изображений расходящихся ветвей огибающей Кельвиновских волн.
Модуль Vк вектора корабля вычисляют по формулам (3), используя измеренные значения смещения Dy и угла α Таким образом вектор  скорости надводного корабля определяют по его модулю Vк и курсу α в плоскости РЛИ относительно направления движения носителя РСА.
скорости надводного корабля определяют по его модулю Vк и курсу α в плоскости РЛИ относительно направления движения носителя РСА.
Предлагаемый способ определения скорости объекта по РЛИ в РСА по сравнению с прототипом обеспечивает повышение достоверности определения вектора надводного корабля. В соответствие с прототипом с помощью РСА в режиме картографирования формируют РЛИ участка поверхности с движущимся объектом. Измеряют на РЛИ смещение Dy по продольной координате y изображения объекта относительно отметки его истинного положения, вычисляют радиальную составляющую скорости V02 (1) и определяют вектор скорости  объекта с помощью соотношений (2): V0 ≥ V02,
объекта с помощью соотношений (2): V0 ≥ V02,
Вектор  скорости объекта в этом случае представляется как вектор, модуль V0 и курс α относительно продольной координаты, у РЛИ которого принадлежат интервалам, в пределах которых соответствующие величины могут принять любые значения, что и определяет низкую достоверность определения вектора
скорости объекта в этом случае представляется как вектор, модуль V0 и курс α относительно продольной координаты, у РЛИ которого принадлежат интервалам, в пределах которых соответствующие величины могут принять любые значения, что и определяет низкую достоверность определения вектора  скорости объекта. Знание максимально возможной скорости VM движения объекта уменьшает интервалы в соотношениях (2) до следующих:
скорости объекта. Знание максимально возможной скорости VM движения объекта уменьшает интервалы в соотношениях (2) до следующих:
однако оценка вектора  остается интервальной. В предлагаемом способе на сформированном с помощью РСА в режиме картографирования РЛИ участка водной поверхности по сравнению с прототипом измеряют смещение Δy по продольной координате y изображения корабля относительно начала изображения корабельного следа и измеряют угол
остается интервальной. В предлагаемом способе на сформированном с помощью РСА в режиме картографирования РЛИ участка водной поверхности по сравнению с прототипом измеряют смещение Δy по продольной координате y изображения корабля относительно начала изображения корабельного следа и измеряют угол  между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа. Непосредственное изменение курса a корабля обеспечивает определение направления вектора
между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа. Непосредственное изменение курса a корабля обеспечивает определение направления вектора  скорости корабля, а проецирование радиальной составляющей Vк2, вычисленной по измеренному значению величины смещения Δy на направление вектора
скорости корабля, а проецирование радиальной составляющей Vк2, вычисленной по измеренному значению величины смещения Δy на направление вектора  скорости корабля, дает возможность найти модуль Vк скорости корабля, т. е. получить точечную оценку вектора
скорости корабля, дает возможность найти модуль Vк скорости корабля, т. е. получить точечную оценку вектора  скорости корабля. Привлечение дополнительной информации, заключенной в изображении корабельного следа на РЛИ, и основанное на этом использование дополнительного непосредственного измерения направления вектора
скорости корабля. Привлечение дополнительной информации, заключенной в изображении корабельного следа на РЛИ, и основанное на этом использование дополнительного непосредственного измерения направления вектора  скорости корабля обеспечивает переход от интервальной оценки вектора скорости в прототипе к точечной оценке вектора
скорости корабля обеспечивает переход от интервальной оценки вектора скорости в прототипе к точечной оценке вектора  в предлагаемом способе, и тем самым обеспечивает повышение достоверности определения вектора
в предлагаемом способе, и тем самым обеспечивает повышение достоверности определения вектора  скорости надводного корабля. Кроме того, измерение смещения Δy по продольной координате изображения корабля относительно начала изображения корабельного следа также способствует достоверности определения вектора
скорости надводного корабля. Кроме того, измерение смещения Δy по продольной координате изображения корабля относительно начала изображения корабельного следа также способствует достоверности определения вектора  скорости корабля. Использование начала изображения корабельного следа в качестве естественного указателя истинного местоположения движущегося корабля на РЛИ участка водной поверхности вместо просто отметки истинного положения корабля в способе прототипе повышает достоверность определения истинного положения корабля на РЛИ, а следовательно, и достоверность измерения смещения Δy и вычисления радиальной составляющей Vk2 скорости и соответственно определения вектора
скорости корабля. Использование начала изображения корабельного следа в качестве естественного указателя истинного местоположения движущегося корабля на РЛИ участка водной поверхности вместо просто отметки истинного положения корабля в способе прототипе повышает достоверность определения истинного положения корабля на РЛИ, а следовательно, и достоверность измерения смещения Δy и вычисления радиальной составляющей Vk2 скорости и соответственно определения вектора  скорости корабля, так как начало изображения корабельного следа, как многокомпонентного распределенного объекта, является более надежным определителем истинного местоположения корабля, чем просто одна сосредоточенная отметка истинного местоположения на РЛИ, выражающаяся в понижении уровня сигнала изображения по сравнению с уровнем сигнала окружающего естественного фона РЛИ. Таким образом, измерение смещения по продольной координате изображения корабля относительно начала изображения его корабельного следа и измерение угла α между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа, т. е. курса корабля в плоскости РЛИ относительно направления движения носителя РСА, повышают достоверность определения вектора
скорости корабля, так как начало изображения корабельного следа, как многокомпонентного распределенного объекта, является более надежным определителем истинного местоположения корабля, чем просто одна сосредоточенная отметка истинного местоположения на РЛИ, выражающаяся в понижении уровня сигнала изображения по сравнению с уровнем сигнала окружающего естественного фона РЛИ. Таким образом, измерение смещения по продольной координате изображения корабля относительно начала изображения его корабельного следа и измерение угла α между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа, т. е. курса корабля в плоскости РЛИ относительно направления движения носителя РСА, повышают достоверность определения вектора  скорости надводного корабля.
скорости надводного корабля.
Источники информации:
1. Буренин Н.И. Радиолокационные станции с синтезированной антенной. М. Сов. радио, 1972, с. 74-75.
2. Радиолокационные станции обзора земли /Под. ред. Г.С. Кондратенкова - М. Радио и связь, 1983, с. 140-141, с. 203-204, рис. 7.1.
3. Радиолокационные станции воздушной разведки /Под. ред. Г.С. Кондратенкова. М. воен. издат, 1983. с. 25 26.
4. Study of a Surbace Ship wake, Internation G. of Remote Sensity. Vol. 1977, p. 689 704/
5. Iessing D. J. Jarget adaptive matched illumination radar. Princ and Appl. Peter Peregrimus. London U.K. 1986, Chapter 7, p. 144-159.
6. Liden S.B, Hammand R.R. Synthetic aperture radar imaging of surbace ships Gournal of Jeogeaf Research. Vol 93, N C10 1988, p. 12293-12303.
7. Jasparovic R. Observetion of ship wakes form space. /AIAA pap. 1992, N1354 c 1-8.
8. Shemdin O. H. Synthetic aperture radar imaging of ship wares in the Iulf of Alaska G. of Jeograf. Reasech. 1978, 83, p. 465-495.
9. Buller E.H. and Junaly G.K.E. The effect of the ship's screws a ship wake and its implications for the radar image of the wake,in Proc. 12th Can. Symp. Remote Sensing IJARSS'89 (Vancower, BC), July 1989, Vol.1, p. 362-365.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ ПРИ СБЛИЖЕНИИ ДЛЯ ВСТРЕЧИ С ОБЪЕКТОМ | 2009 |
|
RU2419108C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ ПРИ СБЛИЖЕНИИ ДЛЯ ВСТРЕЧИ С ОБЪЕКТОМ | 2011 |
|
RU2466424C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И АЗИМУТАЛЬНОЙ КООРДИНАТЫ НАДВОДНЫХ ЦЕЛЕЙ РАДИОЛОКАТОРАМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2014 |
|
RU2566662C1 |
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| СПОСОБ ИМИТАЦИИ НАЗЕМНОГО ОБЪЕКТА ПРИ РАДИОЛОКАЦИОННОМ НАБЛЮДЕНИИ | 2006 |
|
RU2310884C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
Изобретение относится к радиолокации и может быть использовано при применении картографических радиолокаторов с синтезированной апертурной антенны (РСА). Целью изобретения является повышение достоверности определения вектора скорости надводного корабля. Способ заключается в формировании с помощью РСА в режиме картографирования радиолокационного изображения (РЛИ) участка водной поверхности с движущимися объектом, измерении на РЛИ смещения по продольной координате изображения корабля относительно начала изображения его корабельного следа, измерении угла между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа и вычислении модуля вектора скорости корабля по формуле. В качестве касательной к началу оси изображения корабельного следа используют: касательную к началу изображения кильватерного следа корабля; биссектрису угла между касательными к началам изображений расходящихся ветвей огибающей Кельвиновских волн. 2 з. п. ф-лы. 2 ил.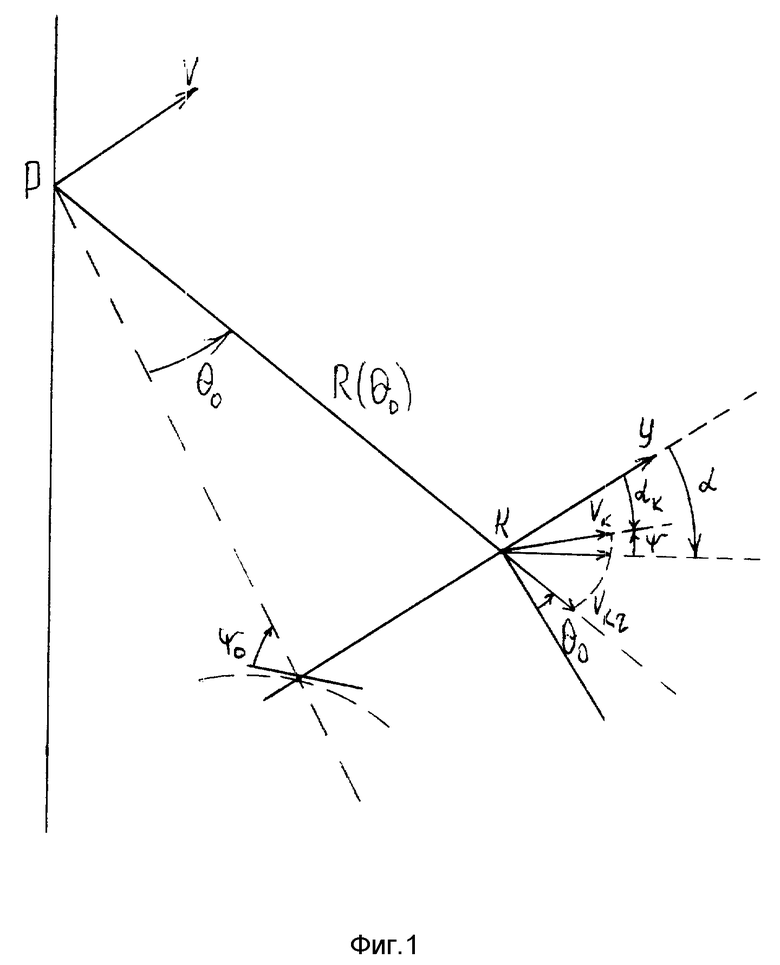
где V модуль вектора скорости носителя РСА;
θo - угол наблюдения, отсчитываемый в плоскости визирования РСА от перпендикуляра к вектору  скорости носителя РСА до направления на объект в середине интервала синтезирования;
скорости носителя РСА до направления на объект в середине интервала синтезирования;
R(θo) - расстояние до объекта в середине интервала синтезирования,
отличающийся тем, что для РЛИ участка водной поверхности с движущимся кораблем в качестве истинного положения корабля используют начало изображения корабельного следа, измеряют угол α между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа, а модуль Vк вектора скорости корабля вычисляют по формуле
где ψ - угол, образованный вектором  скорости корабля и плоскостью визирования,
скорости корабля и плоскостью визирования,
определяется с помощью соотношения
tgψ = tgψosinα,
где ψo - угол пересечения плоскости визирования и наблюдаемого участка водной поверхности.
| Радиолокационные станции обзора Земли /Под ред.Г.С.Кондратенкова | |||
| - М.: Радио и связь, 1983, с | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
