Изобретение относится к сельскохозяйственному машиностроению, в частности, к системам автоматического управления органами управления движением трактора (ускорением, торможением и рулением), оснащенного гидравлической системой руления и роботизированной механической коробкой переключения передач.
В настоящий момент существует множество систем автоматического управления (САУ) сельскохозяйственной техникой. Преимущественно данные САУ реализуются за счёт использования систем технического зрения, а также систем глобального позиционирования для осуществления анализа внешней обстановки в режиме реального времени и выработки управляющий воздействий для управления характеристиками движения указанной техники. Но зачастую такие системы устанавливаются только в сельскохозяйственную технику, оснащенную полностью электронными органами управления движением (электронасосы для управления рулением и торможением, автоматическая коробка передач, и пр.), так как для воздействия на механические органы управления требуется разработка и установка вспомогательного электрогидравлического оборудования индивидуального для каждого типа сельскохозяйственной техники.
Из уровня техники известен способ выявления структуры в поле, способ рулевого управления сельскохозяйственным транспортным средством и сельскохозяйственное транспортное средство (патент RU2571918, опубликован 27.12.2015, МПК G06T7/40, A01B69/04, G06K9/46, G06N7/02). Изобретение относится к системам рулевого управления сельскохозяйственным транспортным средством. Техническим результатом является повышение точности рулевого управления сельскохозяйственного транспортного средства за счет передачи сигнала о корректировке, учитывающей характерную структуру поля. Предложен способ рулевого управления сельскохозяйственным транспортным средством или оборудованием по отношению к структуре в поле. Способ включает в себя этап, на котором получают изображение поля формирователем изображения, анализируют изображение устройством обработки изображения для получения текстурной информации. Далее, согласно способу, присваивают множеству областей изображения показатели вероятности, которые отражают вероятность того, что соответствующая область относится к характерной структуре. В данном источнике раскрыт способ анализа окружающей обстановки для осуществления автоматического движения трактора и передачи управляющего воздействия на органы управления трактора, однако сам способ и система автоматического управления движением трактора не раскрыты.
Так же известен способ дистанционного гидравлического управления поворотом транспортного средства, по которому создают сигнал поворота транспортного средства вращением руля, преобразуют этот сигнал в поток масла от насоса, соответствующий углу поворота руля и направляют поток масла по управляющим маслопроводам к гидроцилиндру, которым поворачивают исполнительное устройство поворота транспортного средства соответственно углу поворота руля (патент RU 2420421, опубликован 10.06.2011, МПК B62D5/06).
Известна тормозная система с электронным управлением для тракторов с прицепом, согласно которой тормозная система с электронным управлением для тракторов с прицепом, содержит: средство для обеспечения и распределения сжатой текучей среды, средство для торможения трактора и прицепа и для руления-посредством-торможения только трактором, средство модулирования сжатой текучей среды для приведения в действие тормозов трактора, причем средство модулирования электрически соединено с электронным центральным блоком управления, управляющим тормозами, дополнительные средства для торможения только прицепа, отличающаяся тем, что дополнительные средства содержат нормально открытое клапанное средство, в обычных условиях обеспечивающее одновременное торможение трактора и прицепа, причем переключение клапанного средства в состояние ЗАКРЫТО управляется электронным центральным блоком управления, когда приводится в действие функция руления-посредством-торможения (Патент 2484991, опубликован 20.06.2013, МПК B60T11/21).
В данных источниках раскрыты способы управления рулением и торможением трактора, по полученным управляющим сигналам, однако этим не достигается полностью автоматическое управление трактором, оснащенного роботизированной механической коробкой переключения передач.
В данном материале предложена система автоматического управления движением трактора, оснащенного гидравлической системой руления и торможения, и роботизированной механической коробкой переключения передач. Наибольшая трудность в реализации автоматического управления трактора такого типа, является управление коробкой переключения передач. Наличие механического сцепления в роботизированных механических коробках передач требует интеграцию дополнительного электрооборудования, позволяющего осуществлять управление не только на уровне гидросистем управления и торможения в составе комбайна, но и осуществлять механические воздействия на органы управления внутри кабины трактора.
Задачей, поставленной при разработке данного изобретения, являлась реализация возможности автоматического управления движением трактора, в соответствии с полученными сигналами от блока управления в составе системы автоматического управления трактора.
Технический результат, достигаемый при реализации данного изобретения, заключается в обеспечении возможности автоматического управления всеми органами управления движением трактора, оснащенного роботизированной механической коробкой переключения передач.
Указанный технический результат достигается в системе автоматического управления движением трактора с роботизированной механической коробкой переключения передач содержащей шину обмена данных, коммутационный модуль, блок управления гидравликой, датчик угла поворота встроенный в поворотный узел переднего колеса и соединенный через шину обмена данных с блоком управления гидравликой, гидравлический насос-дозатор встроенный в гидравлическую систему рулевого механизма трактора, блок управления торможением, пневматический пропорциональный клапан встроенный в пневмогидравлическую систему торможения трактора, блок управления сцеплением и пневматический цилиндр актуации, встроенный в пневматическую систему управления исполнительных механизмов трактора, причём шток пневматического цилиндра актуации соединен с рычагом управления сцеплением трактора, а пневматический цилиндр активации содержит датчик положения штока, при этом выход блока управления гидравликой через шину обмена данных соединен со входом гидравлического насос-дозатора, выход блока управления торможением через шину обмена данных соединен со входом пневматического пропорционального клапана, выход блока управления сцеплением через шину обмена данных соединен со входом пневматический цилиндр актуации, а входы блока управления гидравликой, блока управления торможением, блока управления сцеплением и контроллера коробки переключения передач соединены с выходами блока управления системы автоматического управления трактором через коммутационный модуль.
Для осуществления данного изобретения в тракторе, оснащенном системой технического зрения, либо системой глобального позиционирования, позволяющей осуществлять анализ окружающей сцены и подавать через блок управления системы автоматического управления трактором управляющие сигналы для управления движением трактором, дополнительно устанавливается шина обмена данных, соединяющая все указанные блоки управления, датчики и исполнительные механизмы. Причем обмен данными между блоками управления гидравликой, торможением и сцеплением и блоком управления системы автоматического управления трактора осуществляется через модуль коммутации.
Блок управления гидравликой, блок управления торможением и блок управления сцеплением представляют из себя управляющие микроконтроллеры, своими выходами соединенные соответствующими датчиками и исполнительными механизмами, встроенными в органы управления движением трактора.
Гидравлический насос-дозатор устанавливается в гидравлический рулевой механизм трактора и позволяет по сигналу от микроконтроллера блока управления гидравликой, осуществлять поворот передних колес, путём подачи напора гидравлической жидкости в необходимом направлении. Контроль текущего положения поворота колес осуществляется с помощью датчика угла поворота, установленного в поворотный узел одного из передних колес трактора. Датчик угла поворота своим выходом соединен со входом блока управления гидравликой.
Пневматический пропорциональный клапан, встроенный в пневмогидравлическую систему торможения трактора позволяет по команде, полученной от блока управления торможением осуществлять подачу воздуха в систему торможения трактора, тем самым реализуется процесс автоматического управления торможения скорости движения трактора.
Для осуществления начала движения трактора с роботизированной механической коробкой передач, необходимо выжать рычаг управления сцеплением и подать команду на контроллер коробки переключения передач для выбора необходимой передачи. В рассматриваемой системе это реализовано за счёт установки пневматического цилиндра актуации в механизм рычага управления сцеплением трактора, а также подключения блока управления системы автоматического управления трактором к контроллеру коробки переключения передач. Контроль уровня нажатия на рычаг сцепления осуществляется путем установки в пневматический цилиндр актуации датчика положения штока. Подключение пневматического цилиндра актуации возможно только в случае, если на тракторе присутствует пневмосистема управления исполнительными механизмами трактора. При отсутствии указанной пневмосистемы, в механизм рычага управления сцеплением вместо пневматического цилиндра актуации устанавливается электромеханический линейный актуатор. Соединение штока линейного актуатора с рычагом управления сцеплением осуществляется при помощи электромагнитной муфты, позволяющей механически разрывать связь между штоком актуатора и рычагом сцепления, в случае перехода на ручной режим управления. В случае необходимости перехода на ручной режим управления при использовании пневматического цилиндра актуации, свободное передвижением рычага управления сцеплением достигается путем отключения подачи питания от блока управления сцеплением.
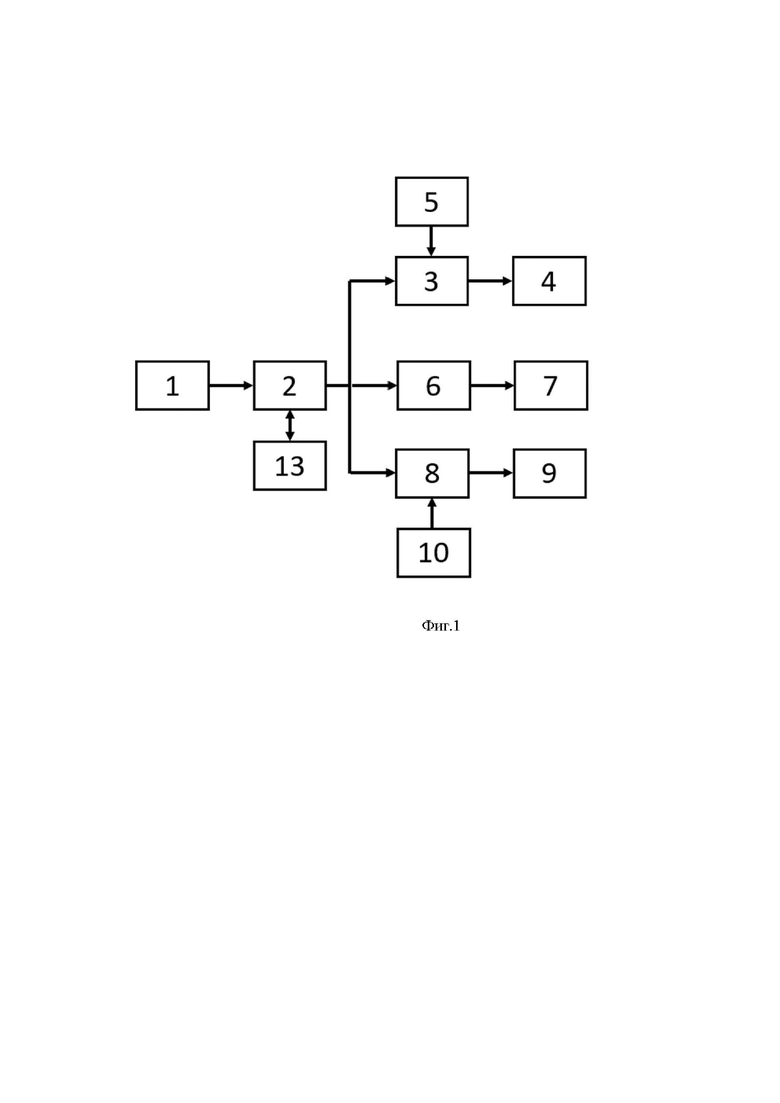
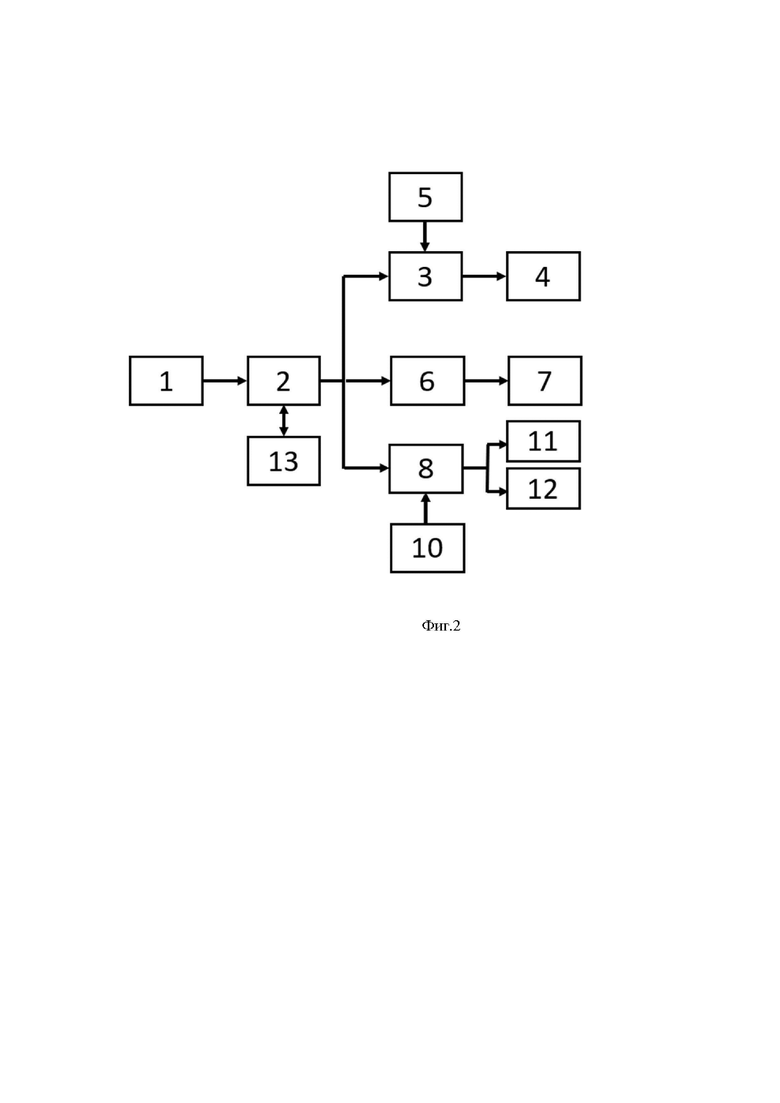
Техническая сущность изобретения поясняется чертежами. На фиг.1 изображена структурная блок-схема системы автоматического управления движением трактора с роботизированной механической коробкой переключения передач, с пневматической системой управления исполнительными механизмами, фиг.2 изображена структурная блок-схема системы автоматического управления движением трактора с роботизированной механической коробкой переключения передач, с применением электромеханического линейного актуатора.
Система автоматического управления движением трактора с роботизированной механической коробкой переключения передач содержит:
1. Блок управления системы автоматического управления трактором;
2. Коммутационный модуль;
3. Блок управления гидравликой;
4. Гидравлический насос-дозатор;
5. Датчик угла поворота;
6. Блок управления торможением;
7. Пневматический пропорциональный клапан;
8. Блок управления сцеплением;
9. Пневматический цилиндр актуации;
10. Датчик положения штока актуатора;
11. Электромеханический линейный актуатор;
12. Электромагнитная муфта;
13. Контроллер коробки переключения передач.
В предпочтительном варианте исполнения изобретение осуществляется следующим образом.
Система автоматического управления трактором, при помощи системы технического зрения анализирует окружающую сцену и при помощи прикладного ПО в блоке управления системы автоматического управления трактором (1), задаются желаемые параметры движения и формируется управляющий сигнал для начала движения, который через коммутационный модуль (2) передается в систему автоматического управления движением трактора с роботизированной механической коробкой переключения передач. Поступивший управляющий сигнал через коммутационный модуль (2) передаётся на блок управления сцеплением (8). Блок управления сцеплением (8), передает сигнал на пневматический цилиндр актуации (9), который в свою очередь осуществляется перемещение рычага управления сцеплением, путём выдвижения штока. После выдвижения штока (выжимания рычага управления сцеплением) датчик положения штока актуатора (10) передаёт сигнал в блок управления сцеплением (8) о том, что сцепление выжато, блок управления сцеплением (8) в свою очередь передает сигнал на блок управления системы автоматического управления трактором (1), который в свою очередь через коммутационный модуль (2) подает сигнал о начале движения и выбранной скорости в контроллер коробки переключения передач (12), после чего осуществляется выбор нужной передачи, контроллер коробки переключения передач (12) сообщает от этом блоку управления системы автоматического управления трактором (1), который передает сигнал на блок управления сцеплением (8) о необходимости вернуть шток пневматического цилиндра актуации (9) в изначальное положение, отпуская при этом рычаг управления сцеплением, что позволяет трактору набрать выбранную в блоке управления системы автоматического управления трактором (1) скорость.
При необходимости осуществить поворот, в блоке управления системы автоматического управления трактором (1) формируется управляющий сигнал, который передается в блок управления гидравликой (3), который в свою очередь передаёт сигнал на активацию гидравлического насос-дозатора (4). Угол поворота колес контролируется при помощи датчика угла поворота (5), установленного в механизм поворота одного из передних колем трактора.
Торможение трактора осуществляется путём формирования необходимого сигнала в блоке управления системы автоматического управления (1) и передачи его через коммутационный модуль (2) на блок управления торможением (6), который в свою очередь передает сигнал в пневматический пропорциональный клапан (7) для нагнетания необходимого давления в тормозную пневмогидравлическую систему трактора. Контроль торможения осуществляется в блоке управления системы автоматического управления трактором (1), путем считывания текущей скорости передвижения из контроллера в составе коробки переключения передач трактора.
В альтернативном варианте исполнения, в случае отсутствия пневмосистемы управления исполнительными механизмами трактора, вместо пневматического цилиндра актуации (9), электромеханический линейный актуатор (11). Для начала движения, в отличие от ранее описанного варианта осуществления блок управления сцеплением (8), передает сигнал на выдвижение штока электромеханического линейного актуатора (11) и сигнал на замыкания электромагнитной муфты (12), механически соединяя при этом шток электромеханического линейного актуатора (11) и рычаг управления сцеплением трактора.
Данная система применяется для задачи автоматического управления движением (органами управления движением) трактора. Использование системы автоматического управления движением позволяет повысить эффективность процесса эксплуатации сельскохозяйственной техники. В сравнении с существующим уровнем техники применение данного изобретения позволяет установить систему автоматического управления движением на тракторы, неоснащенные ею с завода, и не имеющие штатной подготовки для оснащения такой системой (без электронного управления скоростью хода, рулением и торможением). Используется для дооснащения существующих моделей тракторов, оснащенных роботизированной механической коробкой переключения передач.
Таким образом данная система автоматического управления движением позволяет осуществить автоматическое управление всеми органами управления трактора, путем автоматического выжимания сцепления, управления системами руления и торможения в соответствии с сигналом от системы автоматического управления. При этом сохраняется возможность перехода на свободное ручное управление.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автономного управления дорожно-строительной машины | 2022 |
|
RU2794670C1 |
| ПРИВОД СЦЕПЛЕНИЯ | 2013 |
|
RU2541603C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| Роботизированный комплекс управления коробкой переключения передач транспортного средства с механической трансмиссией | 2023 |
|
RU2811218C1 |
| ФУНКЦИОНАЛЬНЫЙ БЛОК ДЛЯ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ И УПРАВЛЕНИЯ УКАЗАННОЙ КОРОБКОЙ ПЕРЕДАЧ | 2014 |
|
RU2638063C2 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| ПЕДАЛЬНЫЙ МЕХАНИЗМ ТОРМОЖЕНИЯ И РУЛЕНИЯ-ПОСРЕДСТВОМ-ТОРМОЖЕНИЯ ДЛЯ ТРАКТОРОВ | 2009 |
|
RU2484990C2 |
| ТОРМОЗНАЯ СИСТЕМА С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАКТОРОВ С ПРИЦЕПОМ | 2009 |
|
RU2484991C2 |
Изобретение относится к сельскохозяйственному машиностроению. Система автоматического управления движением трактора с роботизированной механической коробкой передач содержит шину обмена данных, коммутационный модуль, блок управления гидравликой, датчик угла поворота, гидравлический насос-дозатор, блок управления торможением, пневматический пропорциональный клапан, блок управления сцеплением, пневматический цилиндр актуации. Шток цилиндра актуации соединен с рычагом управления сцеплением трактора. Цилиндр актуации содержит датчик положения штока. Блок управления гидравликой соединен с гидравлическим насосом-дозатором. Блок управления торможением соединен с пневматическим пропорциональным клапаном. Блок управления сцеплением соединен с цилиндром актуации. Указанные блоки соединены через шину обмена данными. Блок управления гидравликой, блок управления торможением, блок управления сцеплением и контроллер коробки переключения передач соединены с блоком управления системы автоматического управления трактором через коммутационный модуль. Реализуется автоматическое управление трактором. 2 ил.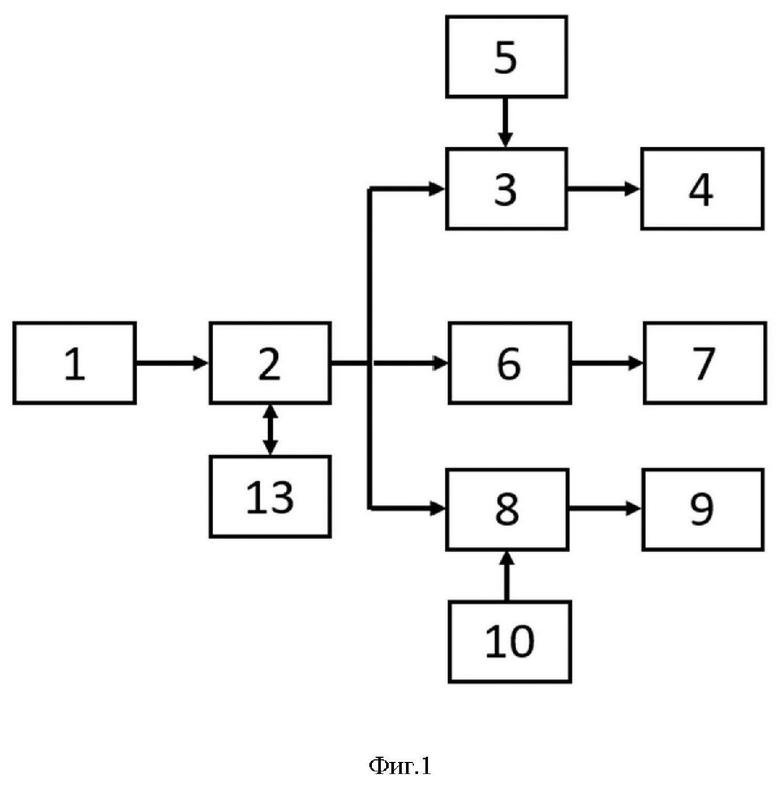
Система автоматического управления движением трактора с роботизированной механической коробкой переключения передач, характеризующаяся тем, что содержит шину обмена данных, коммутационный модуль, блок управления гидравликой, датчик угла поворота, встроенный в поворотный узел переднего колеса и соединенный через шину обмена данных с блоком управления гидравликой, гидравлический насос-дозатор, встроенный в гидравлическую систему рулевого механизма трактора, блок управления торможением, пневматический пропорциональный клапан, встроенный в пневмогидравлическую систему торможения трактора, блок управления сцеплением, пневматический цилиндр актуации, встроенный в пневматическую систему управления исполнительными механизмами трактора, причём шток пневматического цилиндра актуации соединен с рычагом управления сцеплением трактора, а пневматический цилиндр актуации содержит датчик положения штока, при этом выход блока управления гидравликой через шину обмена данных соединен с входом гидравлического насоса-дозатора, выход блока управления торможением через шину обмена данных соединен с входом пневматического пропорционального клапана, выход блока управления сцеплением через шину обмена данных соединен с входом пневматического цилиндра актуации, а входы блока управления гидравликой, блока управления торможением, блока управления сцеплением и контроллера коробки переключения передач соединены с выходами блока управления системы автоматического управления трактором через коммутационный модуль.

