Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству представления информации для использования в автономном транспортном средстве, выполненном с возможностью переключения между автономным управлением вождением, при котором транспортное средство управляется согласно системе автономного оптимального регулирования скорости, и управлением вождением вручную, при котором транспортное средство управляется водителем. Настоящее изобретение также относится к способу представления информации.
Уровень техники
[0002] Недавно разработаны автономные транспортные средства, оптимальное регулирование скорости которых автономно выполняется посредством системы автономного вождения. Такое автономное транспортное средство определяет сознательный уровень водителя посредством тестирования сознательности водителя во время автономного управления вождением. Патентный документ 1 раскрывает традиционный способ для определения сознательного уровня водителя в транспортном средстве, выполненном с возможностью автономного оптимального регулирования скорости.
[0003] Способ определения сознательного уровня водителя, раскрытый в патентном документе 1, предоставляет тестовый элемент водителю после истечения предварительно определенного времени вождения и определяет сознательный уровень водителя посредством оценки реакции на тестовый элемент.
[0004] В этом отношении, во время автономного управления вождением, водитель автономного транспортного средства поручает вождение системе автономного вождения и с большой вероятностью не распознает окружающую обстановку или не знает состояние транспортного средства, что водитель всегда делает при ручном вождении транспортного средства. Тем не менее, автономное транспортное средство может переключаться с автономного управления вождением на управление вождением вручную, когда водитель находится в таком состоянии. В силу этого водитель должен быть всегда готов принимать на себя вождение от системы автономного вождения.
Список библиографических ссылок
Патентные документы
[0005] Патентный документ 1. Публикация заявки на патент (Япония) номер Hei 11-185200
Сущность изобретения
[0006] Традиционный способ определения сознательного уровня водителя, описанный выше, просто определяет, является ли или нет водитель сознательным, и, следовательно, не может определять, может ли или нет водитель фактически принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0007] Настоящее изобретение осуществлено с учетом этих обстоятельств и имеет цель предоставлять устройство представления информации и способ представления информации, которые позволяют проверять, готов ли или нет водитель принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0008] Чтобы разрешать вышеуказанную проблему, устройство представления информации согласно одному аспекту настоящего изобретения используется в автономном транспортном средстве, выполненном с возможностью переключения между автономным управлением вождением и управлением вождением вручную. Это устройство представления информации определяет ответное действие, которое должно выполняться водителем, чтобы проверять то, что водитель готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную, осуществляет управление для запроса водителя на предмет того, чтобы выполнять определенное ответное действие, и обнаруживает ответное действие, выполняемое водителем.
Краткое описание чертежей
[0009] Фиг. 1 является блок-схемой, показывающей конфигурацию устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является схемой, иллюстрирующей примеры кнопок, нажимаемых водителем устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является блок-схемой последовательности операций способа, показывающей процедуру контура управления ответными действиями, выполняемого посредством устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является схемой, иллюстрирующей пример изображения, отображаемого посредством устройства представления информации согласно первому варианту осуществления настоящего изобретения при запросе водителя на предмет того, чтобы выполнять ответное действие.
Фиг. 5 является схемой, иллюстрирующей пример изображения, отображаемого посредством устройства представления информации согласно первому варианту осуществления настоящего изобретения при запросе водителя на предмет того, чтобы выполнять ответное действие.
Фиг. 6 является блок-схемой последовательности операций способа, показывающей процедуру обработки определения выполнения ответных действий, выполняемой посредством устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является блок-схемой последовательности операций способа, показывающей процедуру контура автономного управления вождением, выполняемого посредством устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 8 является блок-схемой, показывающей конфигурацию устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 9 является блок-схемой последовательности операций способа, показывающей процедуру обработки определения выполнения ответных действий, выполняемой посредством устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 10 является блок-схемой последовательности операций способа, показывающей процедуру обработки определения выполнения ответных действий, выполняемой посредством устройства представления информации согласно третьему варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0010] Ниже описываются первый-третий варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0011] Первый вариант осуществления
Конфигурация устройства представления информации
Фиг. 1 является блок-схемой, показывающей конфигурацию устройства представления информации согласно настоящему варианту осуществления. Как показано на фиг. 1, устройство 1 представления информации согласно настоящему варианту осуществления включает в себя модуль 3 анализа поведения водителя, модуль 5 записи реакций водителя, модуль 7 определения ответных действий, модуль 9 управления ответными действиями, модуль 11 ввода задач, модуль 13 формирования отображаемых изображений, модуль 15 управления предупреждениями и модуль 17 формирования аудио. Устройство 1 представления информации дополнительно включает в себя модуль 21 распознавания окружающей обстановки, модуль 23 управления маршрутами, модуль 25 формирования автоматического поведения транспортного средства, модуль 27 определения автоматического поведения транспортного средства, модуль 29 управления поведением транспортного средства и кнопочный переключатель 31.
[0012] Устройство 1 представления информации согласно настоящему варианту осуществления монтируется на автономном транспортном средстве, выполненном с возможностью переключения между автономным управлением вождением, при котором транспортное средство управляется согласно системе автономного оптимального регулирования скорости, и управлением вождением вручную, при котором транспортное средство управляется водителем (автономное транспортное средство ниже упоминается просто в качестве транспортного средства). Транспортное средство оснащено системой автономного вождения, которая выполняет автономное оптимальное регулирование скорости транспортного средства на основе условий движения и внешнего окружения транспортного средства. Система автономного вождения переключается с автономного управления вождением на управление вождением вручную в предварительно определенный момент времени или по мере необходимости. Например, система автономного вождения передает рабочее полномочие водителю, как только датчик, установленный в руле или педали, обнаруживает то, что водитель кладет руку на руль или ставит ногу на педаль. В частности, система автономного вождения передает рабочее полномочие руля и рабочее полномочие педали отдельно согласно операции водителя.
[0013] Модуль 3 анализа поведения водителя обнаруживает состояние и действия водителя из устройств, смонтированных на транспортном средстве, а также получает информацию относительно рабочего состояния транспортного средства и т.п. и анализирует то, какие перемещения и операции вождения водитель выполняет в каком состоянии. В частности, модуль 3 анализа поведения водителя настоящего варианта осуществления соединяется с кнопочным переключателем 31. Модуль 3 анализа поведения водителя обнаруживает операции, выполняемые с кнопочным переключателем 31 водителем, и за счет этого обнаруживает ответное действие, выполняемое водителем.
[0014] Помимо этого, модуль 3 анализа поведения водителя может оценивать уровень активности, уровень утомления, точность вождения и устойчивость вождения водителя и т.п. посредством анализа биологических сигналов от водителя. Модуль 3 анализа поведения водителя получает, в качестве физиологической информации, мозговые альфа- и тета-волны, пульс, частотный анализ форм сигнала сердцебиения, частоту дыхания, частоту движений глаз, период времени закрытия глаз, положение головы, уровни кортизола и амилазы в слюне. Кроме того, модуль 3 анализа поведения водителя получает, в качестве информации касательно транспортного средства, величину изменения поперечной позиции транспортного средства, а в качестве информации поведения, рисунки руления, частотный анализ форм сигнала руления и т.п. На основе этих фрагментов информации, модуль 3 анализа поведения водителя оценивает уровень активности, уровень утомления, точность вождения и устойчивость вождения.
[0015] Модуль 5 записи реакций водителя записывает состояние водителя и реакции водителя, к примеру, перемещения и операции вождения, выполняемые водителем. В частности, модуль 5 записи реакций водителя записывает, например, результаты, проанализированные посредством модуля 3 анализа поведения водителя, операцию вождения вручную водителем, задачу, введенную из модуля 11 ввода задач, и выполнено ли ответное действие или нет. Модуль 5 записи реакций водителя записывает, в частности, информацию в отношении того, нажат ли или нет, и когда нажат, кнопочный переключатель 31 в качестве ответного действия.
[0016] Модуль 7 определения ответных действий определяет ответное действие для проверки, готов ли или нет водитель транспортного средства принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную. В настоящем варианте осуществления, ответное действие представляет собой действие для проверки, может ли или нет водитель выполнять процесс принятия решения при вождении вручную. Ответное действие представляет собой действие, при котором водитель реагирует на запрос на принятие решения относительно операции вождения автономного транспортного средства. При ручном вождении, водитель обычно проводит следующие этапы: "распознавание" обстановки, окружающей транспортное средство, "принятие решения" по выполняемой операции и "управление" транспортным средством на основе решения. В настоящем варианте осуществления, модуль 7 определения ответных действий задает ответное действие для проверки, может ли или нет водитель выполнять процесс принятия решения из вышеуказанных трех процессов, и запрашивает водителя на предмет того, чтобы выполнять это ответное действие, чтобы проверять, готов ли или нет водитель принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную. В настоящем варианте осуществления, модуль 7 определения ответных действий запрашивает водителя на предмет того, чтобы, в качестве ответного действия, принимать решение по операции вождения транспортного средства и реагировать посредством нажатия кнопки. Удовлетворительное выполнение процесса принятия решений означает, что водитель также способен на процесс распознавания. Таким образом, устройство 1 представления информации настоящего варианта осуществления может проверять, способен ли или нет водитель на процесс распознавания, а также процесс принятия решений.
[0017] В частности, модуль 7 определения ответных действий получает несколько возможных вариантов для автоматического поведения транспортного средства, сформированного посредством модуля 25 формирования автоматического поведения транспортного средства, и также получает, из модуля 25 формирования автоматического поведения транспортного средства, информацию относительно области, в которой транспортное средство может двигаться безопасно (информацию области безопасного движения) и информацию относительно позиции помехи в окружающей обстановке (информацию позиций помех). Модуль 7 определения ответных действий затем определяет ответное действие, которое следует запрашивать от водителя, из числа полученных возможных вариантов автоматического поведения транспортного средства.
[0018] Модуль 9 управления ответными действиями осуществляет управление для запроса водителя на предмет того, чтобы выполнять ответное действие, определенное посредством модуля 7 определения ответных действий. В частности, модуль 9 управления ответными действиями определяет момент времени для того, чтобы запрашивать водителя на предмет того, чтобы выполнять ответное действие, определяет, выполняет ли водитель успешно ответное действие или нет, и задает флаг разрешения согласно определению.
[0019] Модуль 11 ввода задач получает возможные варианты автоматического поведения транспортного средства, сформированные посредством модуля 25 формирования автоматического поведения транспортного средства, и отображает эти возможные варианты на устройстве 33 отображения в качестве задач. Водитель управляет транспортным средством посредством касания устройства 33 отображения, имеющего сенсорную панель, и выбора одной из отображаемых задач, которые должны выполняться немедленно после этого. Задачи в данном документе представляют собой минимальные единицы операции вождения, такие как движение по прямой, поворот направо или налево, переход на левую или правую полосу движения, остановка, начало движения, повышение скорости или снижение скорости. Такие задачи, как движение по прямой и поворот направо или налево представляются посредством пиктограмм и отображаются на экране, представленном водителю. Модуль 11 ввода задач отображает задачи таким образом, что водитель может идентифицировать, какая из них представляет собой задачу, выбранную посредством системы автономного вождения, задачу, выбираемую водителем, и задачу, не выбираемую водителем. Таким образом, водитель может изменять задачу, выбранную посредством системы автономного вождения, посредством выбора задачи, которая является одной из выбираемых задач, но не выбрана посредством системы автономного вождения. Хотя конечное поведение транспортного средства определяется посредством модуля 27 определения автоматического поведения транспортного средства, задача, введенная из модуля 11 ввода задач, предпочтительно определяется в качестве автоматического поведения транспортного средства.
[0020] Модуль 13 формирования отображаемых изображений, который соединяется с устройством 33 отображения, формирует изображение, которое должно быть представлено водителю, и выводит изображение на устройство 33 отображения, например, при запросе водителя на предмет того, чтобы выполнять ответное действие, или отображения задач. Устройство 33 отображения может представлять собой жидкокристаллический дисплей и размещается, например, в нижней позиции перед водителем под углом 10 градусов и на расстоянии от водителя до экрана в 90 см. Устройство 33 отображения имеет сенсорную панель и принимает ввод от водителя.
[0021] Модуль 15 управления предупреждениями, который соединяется с модулем 35 формирования предупреждающих звуков, получает информацию из модуля 9 управления ответными действиями, и при определении того, что предупреждение должно включаться, задает надлежащий предупреждающий звук и выводит сигнал в модуль 35 формирования предупреждающих звуков. Когда предупреждение должно включаться, модуль 15 управления предупреждениями также выводит сигнал в модуль 13 формирования отображаемых изображений, так что устройство 33 отображения отображает предупреждающее изображение. Аналогично, модуль 15 управления предупреждениями выводит сигнал в модуль 17 формирования аудио, так что динамик 37 выводит предупредительное сообщение.
[0022] Модуль 17 формирования аудио, который соединяется с динамиком 37, формирует надлежащее сообщение и выводит сообщение в динамик 37, например, при запросе водителя на предмет того, чтобы выполнять ответное действие.
[0023] Модуль 21 распознавания окружающей обстановки получает информацию об окружающей обстановке рассматриваемого транспортного средства от группы датчиков 41, таких как камера, радар и GPS, включенных в рассматриваемое транспортное средство, и также получает картографические данные и информацию относительно текущего местоположения рассматриваемого транспортного средства из базы 43 данных. На основе этих фрагментов информации, модуль 21 распознавания окружающей обстановки распознает окружающую обстановку рассматриваемого транспортного средства и формирует информацию окружающей обстановки.
[0024] Модуль 23 управления маршрутами получает картографические данные и информацию относительно текущего местоположения рассматриваемого транспортного средства, сохраненную в базе 43 данных, и управляет всем маршрутом движения от текущего местоположения рассматриваемого транспортного средства до пункта назначения. Модуль 23 управления маршрутами также формирует маршрутную информацию, содержащую планы для всего маршрута движения для рассматриваемого транспортного средства.
[0025] Модуль 25 формирования автоматического поведения транспортного средства получает информацию окружающей обстановки из модуля 21 распознавания окружающей обстановки, чтобы распознавать окружающую обстановку рассматриваемого транспортного средства, и получает маршрутную информацию из модуля 23 управления маршрутами, чтобы выяснять маршрут движения рассматриваемого транспортного средства. На основе этих фрагментов информации, модуль 25 формирования автоматического поведения транспортного средства получает информацию области безопасного движения и информацию местоположений помех рассматриваемого транспортного средства в настоящий момент и вычисляет несколько возможных вариантов для автоматического поведения транспортного средства (проезжаемые пути и профили скорости), посредством которых рассматриваемое транспортное средство способно на движение в области безопасного движения.
[0026] Модуль 27 определения автоматического поведения транспортного средства получает информацию окружающей обстановки из модуля 21 распознавания окружающей обстановки, чтобы распознавать окружающую обстановку рассматриваемого транспортного средства, и получает маршрутную информацию из модуля 23 управления маршрутами, чтобы выяснять маршрут движения рассматриваемого транспортного средства. На основе этих фрагментов информации, модуль 27 определения автоматического поведения транспортного средства определяет автоматическое поведение транспортного средства из возможных вариантов автоматического поведения транспортного средства, сформированных посредством модуля 25 формирования автоматического поведения транспортного средства, и выводит автоматическое поведение транспортного средства в модуль 29 управления поведением транспортного средства. Когда водитель должен выполнять ответное действие, модуль 27 определения автоматического поведения транспортного средства всегда оценивает, является ли или нет ответное действие эффективным в свете текущей окружающей обстановки. Когда задача, выбранная водителем, вводится посредством модуля 11 ввода задач, модуль 27 определения автоматического поведения транспортного средства предпочтительно определяет входную задачу в качестве автоматического поведения транспортного средства.
[0027] Модуль 29 управления поведением транспортного средства выводит управляющие сигналы в каждый актуатор 45, смонтированный на рассматриваемом транспортном средстве, чтобы выполнять автоматическое поведение транспортного средства, определенное посредством модуля 27 определения автоматического поведения транспортного средства. Модуль 29 управления поведением транспортного средства выводит автоматическое поведение транспортного средства в модуль 3 анализа поведения водителя в качестве результата управления.
[0028] Кнопочный переключатель 31 представляет собой устройство для приема ввода "Да" или "Нет" от водителя, который запрошен выполнять ответное действие. В частности, кнопочный переключатель 31 может иметь только кнопку "Да", как показано на фиг. 2(a), так что водитель нажимает кнопку только при вводе утвердительного решения. В таком случае, модуль 9 управления ответными действиями принимает только утвердительную реакцию от водителя. Альтернативно, кнопочный переключатель 31 может иметь только кнопку "Нет", как показано на фиг. 2(b), так что водитель нажимает кнопку только при вводе отрицательного решения. В таком случае, модуль 9 управления ответными действиями принимает только отрицательную реакцию от водителя. Альтернативно, кнопочный переключатель 31 может иметь как кнопку "Да", так и кнопку "Нет", как показано на фиг. 2(c), так что водитель нажимает кнопку "Да" при вводе утвердительного решения и нажимает кнопку "Нет" при вводе отрицательного решения. В таком случае, модуль 9 управления ответными действиями принимает как утвердительную реакцию, так и отрицательную реакцию от водителя. Когда водитель нажимает любую из таких кнопок, кнопка мигает или вибрирует, либо выводится звуковой эффект, аудио и т.п., так что водитель может быть уверен в том, что кнопка нажата.
[0029] Как показано на фиг. 2(a), изображение кнопки может отображаться на устройстве 33 отображения, так что водитель может вводить свой выбор посредством касания изображения устройства 33 отображения. Таким образом, выделенный переключатель не должен устанавливаться в качестве кнопочного переключателя 31. Альтернативно, выделенная кнопка может устанавливаться на приборной панели транспортного средства, как показано на фиг. 2(b). Переключатель может устанавливаться в руле, как показано на фиг. 2(c), чтобы добиваться удобства использования. Тем не менее, фиг. 2 просто приводит примеры. Кнопка "Да" может устанавливаться на приборной панели или руле, или кнопка "Нет" может отображаться на устройстве 33 отображения.
[0030] Устройство 1 представления информации сконфигурировано посредством электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU, а также периферийные устройства, и работает в качестве вышеописанных модулей посредством выполнения конкретных программ.
[0031] Процедура контура управления ответными действиями
Далее описывается процедура контура управления ответными действиями посредством устройства 1 представления информации согласно настоящему варианту осуществления со ссылкой на блок-схему последовательности операций способа на фиг. 3.
[0032] Как показано на фиг. 3, на этапе 101, модуль 9 управления ответными действиями считывает данные, необходимые для выполнения контура управления ответными действиями. В частности, модуль 9 управления ответными действиями считывает результаты анализа по перемещениям, операциям вождения водителя и т.п. из модуля 3 анализа поведения водителя, считывает информацию окружающей обстановки из модуля 21 распознавания окружающей обстановки и считывает маршрутную информацию из модуля 23 управления маршрутами. Модуль 9 управления ответными действиями также считывает предысторию операций с кнопочным переключателем 31 и предысторию реакций от водителя, которые записываются в модуле 5 записи реакций водителя.
[0033] На этапе S102, модуль 9 управления ответными действиями анализирует, на основе таких считываемых данных, ответное действие, запрашиваемое от водителя, и предысторию реакций водителя на ответное действие.
[0034] На этапе S103, модуль 9 управления ответными действиями определяет, равно ли или выше либо нет число раз, когда ответное действие не выполнено, опорного значения. Число раз, когда ответное действие не выполнено, включает в себя отсутствие реакции водителя на запрос на ответное действие и ненадлежащую реакцию водителя. Модуль 9 управления ответными действиями переходит к этапу S104, когда число раз, когда ответное действие не выполнено, равно или выше опорного значения, и переходит к этапу S105, когда число раз, когда ответное действие не выполнено, ниже опорного значения.
[0035] На этапе S104, модуль 9 управления ответными действиями задает флаг разрешения как ложный, поскольку число раз, когда ответное действие не выполнено, равно или выше опорного значения. Посредством этого флага, модуль 9 управления ответными действиями определяет, что водитель не готов к автономному управлению вождением, и осуществляет управление для прекращения автономного управления вождением. Модуль 9 управления ответными действиями также определяет, что водитель не готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную. Помимо этого, модуль 9 управления ответными действиями вводит, в модуль 27 определения автоматического поведения транспортного средства, индикатор того, что флаг разрешения задан как ложный.
[0036] Когда флаг разрешения в силу этого задан как ложный, контур управления ответными действиями согласно настоящему варианту осуществления завершается.
[0037] На этапе S105, модуль 7 определения ответных действий определяет ответное действие, которое следует запрашивать от водителя. Более конкретно, модуль 7 определения ответных действий получает, из модуля 25 формирования автоматического поведения транспортного средства, множество возможных вариантов автоматического поведения транспортного средства, а также информацию области безопасного движения и информацию местоположений помех. Из возможных вариантов автоматического поведения транспортного средства, полученных таким способом, модуль 7 определения ответных действий определяет ответное действие, которое следует представлять водителю. Примеры операции вождения, которая запрашивается от водителя в качестве ответного действия, включают в себя поворот направо или налево, обгон, переход на левую или правую полосу движения, повышение или снижение скорости, вливание в поток, остановку, начало движения, временную остановку и следование за впереди идущим транспортным средством. Эти операции вождения, запрашиваемые от водителя, являются осуществимыми операциями вождения с учетом окружающей обстановки. Операции вождения, считающиеся рациональными с учетом всего маршрута рассматриваемого транспортного средства, задаются в качестве вариантов для ответного действия.
[0038] Затем, на этапе S106, модуль 9 управления ответными действиями определяет момент времени для того, чтобы запрашивать ответное действие от водителя. В частности, модуль 9 управления ответными действиями получает, из модуля 3 анализа поведения водителя, результат анализа состояния водителя, а также информацию касательно транспортного средства и получает, из модуля 5 записи реакций водителя, момент времени, когда выполнялось предыдущее ответное действие, и информацию истекшего времени. Модуль 9 управления ответными действиями также получает информацию области безопасного движения и информацию местоположений помех из модуля 7 определения ответных действий и получает информацию относительно оптимального регулирования скорости из системы автономного вождения рассматриваемого транспортного средства. На основе этих фрагментов информации, модуль 9 управления ответными действиями определяет момент времени для того, чтобы запрашивать ответное действие от водителя.
[0039] Например, модуль 9 управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие каждый раз, когда проходит предварительно определенный период времени, или каждый раз, когда рассматриваемое транспортное средство выполняет предварительно определенное число операций оптимального регулирования скорости. Модуль 9 управления ответными действиями может задавать момент времени для того, чтобы запрашивать ответное действие от водителя, на основе состояния водителя. Например, если определено то, что водитель не бодрствует или не смотрит вперед, модуль 9 управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие. Модуль 9 управления ответными действиями также может задавать момент времени для того, чтобы запрашивать ответное действие от водителя, на основе результата анализа операции вождения вручную, выполняемой водителем. Например, операция вождения вручную, выполняемая водителем, анализируется, если водитель имеет высокие сознательные уровни, точность вождения и устойчивость вождения, модуль 9 управления ответными действиями увеличивает период времени, который истекает перед запросом ответного действия, и если водитель имеет низкие сознательные уровни, точность вождения и устойчивость вождения, модуль 9 управления ответными действиями уменьшает период времени, который истекает перед запросом ответного действия. Аналогично, модуль 9 управления ответными действиями увеличивает период времени, который истекает перед запросом ответного действия, если водитель имеет высокий уровень утомления, и уменьшает период времени, который истекает перед запросом ответного действия, если водитель имеет низкий уровень утомления.
[0040] Модуль 9 управления ответными действиями также может задавать момент времени для того, чтобы запрашивать ответное действие от водителя, на основе условий движения и внешней обстановки рассматриваемого транспортного средства. Например, модуль 9 управления ответными действиями задает момент времени для того, чтобы запрашивать ответное действие, например, на основе скорости рассматриваемого транспортного средства, интенсивности трафика или того, движется ли рассматриваемое транспортное средство на шоссе или нет. Тем не менее, если водитель выполняет управление вождением вручную, осознанно или вручную управляет транспортным средством посредством указаний посредством информации из системы автономного вождения, такая операция вождения вручную может рассматриваться в качестве эквивалента ответному действию при условии, что вождение вручную выполнено безопасно. После того, как водитель вручную ведет транспортное средство, модуль 9 управления ответными действиями задерживает момент времени для того, чтобы запрашивать ответное действие от водителя, либо сокращает число запросов ответных действий.
[0041] Когда момент времени для того, чтобы переключаться с автономного управления вождением на управление вождением вручную, предварительно определен, модуль 9 управления ответными действиями сокращает интервал запроса ответного действия от водителя по мере того, как приближается предварительно определенный момент времени. Например, если автономное управление вождением переключается на управление вождением вручную, когда транспортное средство съезжает с шоссе, чтобы ехать по местным дорогам, модуль 9 управления ответными действиями сокращает интервал запроса ответного действия от водителя по мере того, как приближается момент времени для того, чтобы съезжать с шоссе.
[0042] Затем, на этапе S107, модуль 9 управления ответными действиями определяет, наступил ли или нет момент времени запроса ответного действия, определенный на этапе S106. Если момент времени запроса ответного действия еще не наступил, модуль 9 управления ответными действиями продолжает определение, наступил ли или нет момент времени запроса ответного действия. Если момент времени для того, чтобы запрашивать ответное действие, наступил, модуль 9 управления ответными действиями переходит к этапу S108.
[0043] На этапе S108, модуль 9 управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие. В частности, через изображение на устройстве 33 отображения и сообщение из динамика 37, модуль 9 управления ответными действиями спрашивает водителя на предмет того, следует ли или нет выполнять операцию вождения, определенную посредством модуля 7 определения ответных действий, и указывает водителю нажимать кнопку. Например, модуль 9 управления ответными действиями задает водителю такой вопрос, как "Хотите перейти на правую полосу движения?" или "Хотите повысить скорость?" В ответ на это, водитель нажимает кнопочный переключатель 31 и за счет этого выполняет ответное действие.
[0044] Ниже описывается конкретный пример обработки, выполняемой при запросе водителя на предмет того, чтобы выполнять ответное действие. В этом примере, водитель запрашивается на предмет того, чтобы выполнять ответное действие относительно перехода на правую полосу движения, когда рассматриваемое транспортное средство находится в состоянии автономного движения в режиме оптимального регулирования скорости при следовании за впереди идущим транспортным средством, с поддержанием определенного зазора между транспортными средствами.
[0045] Модуль 9 управления ответными действиями спрашивает водителя "Хотите перейти на правую полосу движения?" с помощью сообщения, отображаемого на устройстве 33 отображения, и аудио, исходящего из динамика 37 одновременно. В случае если кнопочный переключатель 31 имеет только кнопку "Да", если водитель нажимает кнопку "Да", определяется то, что водитель выполняет ответное действие. Если кнопка не нажата, может быть определено то, что водитель не выполняет ответное действие. В этом случае, может выполняться операция вождения, заданная по умолчанию, например, следование за впереди идущим транспортным средством.
[0046] В случае если кнопочный переключатель 31 имеет кнопку "Да" и кнопку "Нет", если водитель нажимает кнопку "Да", определяется то, что водитель выполняет ответное действие, а если водитель нажимает кнопку "Нет", определяется то, что водитель не выполняет ответное действие. Если ни одна из кнопок не нажата, может быть определено то, что водитель не выполняет ответное действие. В этом случае, может выполняться операция вождения, заданная по умолчанию, например, следование за впереди идущим транспортным средством.
[0047] В случае если кнопочный переключатель 31 имеет только кнопку "Нет", определяется то, что водитель выполняет ответное действие, если водитель не нажимает кнопку "Нет", и определяется то, что водитель не выполняет ответное действие, если водитель нажимает кнопку "Нет".
[0048] В вышеописанном случае, в котором определяется то, что ответное действие выполнено без нажатия какой-либо кнопки, рассматриваемое транспортное средство может продолжать автономно управляться, хотя кнопка не нажата. Чтобы не допускать ситуации, когда транспортное средство продолжает автономно управляться при игнорировании запроса и не нажатии кнопки водителем, модуль 9 управления ответными действиями задает водителю вопрос, в ответ на который нажатие кнопки является обязательным. Такой вопрос называется испытанием на предмет ловушек в данном документе и задается, например, если кнопка не нажата с предварительно определенной частотой или предварительно определенное число раз последовательно. В случае если кнопочный переключатель 31 имеет только кнопку "Да", модуль 9 управления ответными действиями задает такой вопрос, как "Красный свет впереди. Хотите остановиться?". Ненажатие кнопки является несоответствующей реакцией на этот вопрос, так что водитель должен нажимать кнопку. Когда кнопочный переключатель 31 представляет собой только кнопку "Нет", модуль 9 управления ответными действиями задает такой вопрос, как "Хотите остановиться на пешеходном переходе?" Этот вопрос предлагает операцию вождения, которая очевидно является несоответствующей. Ненажатие кнопки "Нет" должно представлять собой несоответствующую реакцию, так что водитель должен нажимать кнопку. Для случая, в котором предусмотрены как кнопка "Да", так и кнопка "Нет", задается вопрос только для случая кнопки "Нет".
[0049] Если водитель не нажимает кнопку в ответ на такие испытания на предмет ловушек, модуль 9 управления ответными действиями определяет то, что водитель игнорирует запрос на то, чтобы выполнять ответное действие, или находится в состоянии, не допускающем выполнение ответного действия, и предупреждает водителя посредством выдачи предупреждающего звука и мигания экрана отображения.
[0050] При запросе на предмет того, чтобы выполнять ответное действие посредством задания таких вопросов, как описано выше, модуль 9 управления ответными действиями может отображать пиктограммы, как показано на фиг. 4. В пиктограммах, показанных на фиг. 4, ссылочная позиция 51 указывает поворот направо, 52 – поворот налево, 53 – переход на левую полосу движения, 54 – переход на правую полосу движения, 55 – движение по прямой (начало движения или следование за впереди идущим автомобилем) и 56 – остановку. На фиг. 4, пиктограммы, показанные пунктирными линиями (к примеру, поворот 52 налево и переход 54 на правую полосу движения), представляют собой операции вождения, не выбираемые водителем, поскольку эти операции вождения определяются посредством системы автономного вождения в качестве неосуществимых на основе полного маршрута и окружающей обстановки. Обведенная белая пиктограмма (движение 55 по прямой) представляет собой операцию вождения, выполняемую в данный момент. Пиктограмма с плотной заштриховкой (поворот 51 направо) представляет собой операцию вождения, инструктированную посредством системы автономного вождения. Пиктограмма с неплотной заштриховкой (переход 53 на левую полосу движения) представляет собой операцию вождения, которая является осуществимой с учетом окружающей обстановки, но не выбрана в качестве ответного действия.
[0051] Модуль 9 управления ответными действиями может обрабатывать пиктограммы, показанные на фиг. 4, так что они могут распознаваться посредством периферийного зрения, как показано на фиг. 5. В этом случае, модуль 9 управления ответными действиями отображает рисунок, сформированный посредством пространственной частоты и временной частоты, не имеющий край яркости. Например, модуль 9 управления ответными действиями отображает, на устройстве 33 отображения, рисунок, сформированный в основном посредством компонентов при пространственной частоте, не превышающей 1 CPD (цикл на градус), и при временной частоте 1-7 Гц. Водитель в силу этого может распознавать ответное действие посредством периферийного зрения без прямого взгляда на устройство 33 отображения.
[0052] В каждом изображении пиктограммы, показанном на фиг. 5, холмообразные элементы, составляющие изображение пиктограммы, плавно перемещаются снизу вверх, формируя непрерывный поток. Поскольку движение плавного протекания изображения пиктограммы может легко направлять глаза водителя, обработка фильтрации нижних частот выполняется для полного изображения с тем, чтобы исключать компоненты с высокой пространственной частотой.
[0053] На фиг. 5, модуль 9 управления ответными действиями задает скорость пиктограммы следующим образом. Пиктограмма, представляющая операцию вождения, выполняемую в данный момент, протекает на относительно высокой скорости, пиктограмма, представляющая операцию вождения в качестве ответного действия, протекает на меньшей скорости, и пиктограмма, представляющая операцию вождения по умолчанию, протекает на самой маленькой скорости. За счет такого добавления движений плавного протекания в пиктограммы, пиктограммы могут отличаться на основе нескольких атрибутов, таких как цвет, скорость и направление потока и контрастность и т.п. Поскольку пиктограммы размываются посредством обработки изображений, водитель может отличать, посредством периферийного зрения, операцию вождения, выполняемую в данный момент, операцию вождения в качестве ответного действия и операцию вождения, заданную по умолчанию, без фиксации своих глаз. Для получения дополнительной информации следует обратиться, например, к публикации заявки на патент (Япония) номер 2006-184854 и к работе авторов Funakawa, Masami "Ambient Information Display Method Based upon Spatio-temporal Properties of Driver's Field of View", AUTOMOTIVE ENGINEERING AND TECHNOLOGIES 40, 5, 1191-1196. Пиктограмма, представляющая операцию вождения в качестве ответного действия, может повторять мигание вместо плавного протекания. Это обеспечивает возможность более простого различения, чем использование различных скоростей потока. Если пиктограмма мигает таким способом, что ее контрастность изменяется в качестве прямоугольных волн, мигание может раздражать водителя и направлять его глаза. Следовательно, предпочтительно, если пиктограмма мигает таким способом, что ее контрастность изменяется плавно в качестве синусоидальных волн.
[0054] Синхронно с изображениями, отображаемыми на устройстве 33 отображения, модуль 9 управления ответными действиями может предоставлять сенсорную стимуляцию для водителя. Например, модуль 9 управления ответными действиями может предоставлять водителю вибрационную стимуляцию, например, через руль или звуковой эффект. Это гарантирует то, что водитель должен почувствовать, что информация предоставляется.
[0055] На этапе S109, модуль 9 управления ответными действиями сравнивает операцию с кнопкой, выполняемую водителем, с ответным действием, запрашиваемым от водителя, и определяет, выполняет ли водитель ответное действие или нет. Ниже описывается конкретная обработка для определения, выполнено ли или нет ответное действие, со ссылкой на фиг. 6.
[0056] При определении того, что водитель не выполняет ответное действие, на этапе S109, модуль 9 управления ответными действиями переходит к этапу S110. На этапе S110, модуль 9 управления ответными действиями вводит, в модуль 5 записи реакций водителя, индикатор того, что ответное действие не выполнено, и возвращается к этапу S101.
[0057] При определении того, что водитель выполняет ответное действие, на этапе S109, модуль 9 управления ответными действиями переходит к этапу S111. На этапе S111, модуль 9 управления ответными действиями вводит, в модуль 5 записи реакций водителя, индикатор того, что ответное действие выполнено, и переходит к этапу S112.
[0058] На этапе S112, модуль 9 управления ответными действиями задает флаг разрешения как истинный. В силу этого, модуль 9 управления ответными действиями определяет то, что водитель разрешает автономное управление вождением, и осуществляет управление таким образом, что автономное управление вождением может продолжаться. Помимо этого, модуль 9 управления ответными действиями определяет то, что водитель готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную. Модуль 9 управления ответными действиями также вводит, в модуль 27 определения автоматического поведения транспортного средства, индикатор того, что флаг разрешения задан как истинный.
[0059] Когда флаг разрешения в силу этого задан как истинный, контур управления ответными действиями согласно настоящему варианту осуществления завершается.
[0060] Процедура обработки определения выполнения ответных действий
Далее изложена процедура обработки определения выполнения ответных действий, выполняемая на этапе S109 контура управления ответными действиями, описанного выше, со ссылкой на блок-схему последовательности операций способа на фиг. 6.
[0061] Как показано на фиг. 6, на этапе S201, модуль 9 управления ответными действиями считывает данные, указывающие обнаруженную операцию с кнопочным переключателем 31, из модуля 3 анализа поведения водителя, так что модуль 9 управления ответными действиями может распознавать операцию, выполняемую водителем с кнопочным переключателем 31.
[0062] На этапе S202, модуль 9 управления ответными действиями определяет, представляет ли собой ответное действие, запрашиваемое от водителя, испытание на предмет ловушек или нет. Модуль 9 управления ответными действиями переходит к этапу S203, если оно не представляет собой испытание на предмет ловушек, и переходит к этапу S206, если оно представляет собой испытание на предмет ловушек.
[0063] На этапе S203, модуль 9 управления ответными действиями сравнивает операцию водителя с кнопочным переключателем 31 с ответным действием, определенным на S105, и определяет, совпадает ли операция с кнопочным переключателем 31 с ответным действием или нет. Когда операция с кнопочным переключателем 31 совпадает с ответным действием, модуль 9 управления ответными действиями переходит к этапу S204. На этапе S204, модуль 9 управления ответными действиями выводит индикатор того, что ответное действие выполнено, и определяет то, что водитель готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0064] Когда операция с кнопочным переключателем 31 не совпадает с ответным действием на этапе S203, модуль 9 управления ответными действиями переходит к этапу S205. На этапе S205, модуль 9 управления ответными действиями выводит индикатор того, что ответное действие не выполнено, и определяет то, что водитель не готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0065] На этапе S206, на который переходит модуль 9 управления ответными действиями после определения на этапе S202 того, что ответное действие, запрашиваемое от водителя, представляет собой испытание на предмет ловушек, модуль 9 управления ответными действиями определяет, нажимает ли водитель кнопочный переключатель 31 или нет. Когда ответное действие представляет собой испытание на предмет ловушек, вопрос по нажатию кнопочного переключателя 31 обязательно задается. Таким образом, если кнопочный переключатель 31 нажат, модуль 9 управления ответными действиями переходит к этапу S204, чтобы выводить индикатор того, что ответное действие выполнено. Если на этапе S206 определено то, что кнопочный переключатель 31 не нажат, несмотря на испытание на предмет ловушек, модуль 9 управления ответными действиями переходит к этапу S205, чтобы выводить индикатор того, что ответное действие не выполнено.
[0066] После вывода индикатора того, что ответное действие выполнено или не выполнено, модуль 9 управления ответными действиями завершает обработку определения выполнения ответных действий и возвращается в контур управления ответными действиями.
[0067] Процедура контура автономного управления вождением
Далее описывается процедура контура автономного управления вождением, выполняемая посредством устройства 1 представления информации согласно настоящему варианту осуществления, со ссылкой на блок-схему последовательности операций способа на фиг. 7.
[0068] Как показано на фиг. 7, на этапе S301, модуль 25 формирования автоматического поведения транспортного средства считывает информацию окружающей обстановки из модуля 21 распознавания окружающей обстановки и маршрутную информацию из модуля 23 управления маршрутами.
[0069] На этапе S302, модуль 25 формирования автоматического поведения транспортного средства формирует возможный вариант автоматического поведения транспортного средства в соответствии с системной логикой типичной системы автономного вождения. Возможные варианты автоматического поведения транспортного средства формируются в количестве более одного. Эти возможные варианты автоматического поведения транспортного средства содержат проезжаемый путь рассматриваемого транспортного средства и профиль скорости.
[0070] Системная логика системы автономного вождения представляет собой логику, используемую для определения автоматического поведения транспортного средства с учетом эффективности и безопасности вождения. Например, автоматическое поведение транспортного средства определяется посредством приоритезации кратчайшего маршрута до пункта назначения или, в области интенсивного движения, приоритезации меньшего времени вместо расстояния. На маршруте, обязательная смена полосы движения выполняется, но необязательная смена полосы движения не выполняется для того, чтобы отдавать приоритет безопасности.
[0071] Согласно такой системной логике, модуль 25 формирования автоматического поведения транспортного средства формирует проезжаемый путь, к примеру, поворот направо, поворот налево или движение по прямой, и профиль скорости в качестве возможных вариантов автоматического поведения транспортного средства.
[0072] На этапе S303, модуль 27 определения автоматического поведения транспортного средства определяет, на основе ввода из модуля 9 управления ответными действиями, задаен ли флаг разрешения как истинный или нет. Когда флаг разрешения является истинным, модуль 27 определения автоматического поведения транспортного средства определяет то, что водитель разрешает, что автономное управление вождением должно продолжаться, и переходит к этапу S304. Когда флаг разрешения не является истинным, модуль 27 определения автоматического поведения транспортного средства возвращается к этапу S301.
[0073] На этапе S304, модуль 27 определения автоматического поведения транспортного средства определяет, вводит ли водитель задачу через модуль 11 ввода задач или нет. Модуль 27 определения автоматического поведения транспортного средства переходит к этапу S305, когда задача не введена, и переходит к этапу S306, когда задача введена.
[0074] На этапе S305, модуль 27 определения автоматического поведения транспортного средства определяет автоматическое поведение транспортного средства в соответствии с системной логикой системы автономного вождения, поскольку задача не введена водителем. Модуль 27 определения автоматического поведения транспортного средства определяет автоматическое поведение транспортного средства из числа возможных вариантов автоматического поведения транспортного средства, сформированных посредством модуля 25 формирования автоматического поведения транспортного средства, в соответствии с системной логикой.
[0075] Например, поскольку системная логика системы автономного вождения определяет автоматическое поведение транспортного средства с учетом эффективности и безопасности вождения, системная логика определяет автоматическое поведение транспортного средства посредством приоритезации кратчайшего маршрута до пункта назначения, когда трафик не является интенсивным, и определяет автоматическое поведение транспортного средства посредством приоритезации меньшего времени вместо расстояния, когда трафик является интенсивным.
[0076] Модуль 27 определения автоматического поведения транспортного средства в силу этого определяет, в качестве автоматического поведения транспортного средства, проезжаемый путь, к примеру, поворот направо, поворот налево или движение по прямой, и его профиль изменения скорости, и переходит к этапу S307.
[0077] На этапе S306, модуль 27 определения автоматического поведения транспортного средства определяет, в качестве автоматического поведения транспортного средства, задачу, введенную водителем через модуль 11 ввода задач. Модуль 27 определения автоматического поведения транспортного средства затем записывает, в модуле 5 записи реакций водителя, то, что задача, введенная водителем, определена в качестве автоматического поведения транспортного средства, и переходит к этапу S307.
[0078] На этапе S307, модуль 29 управления поведением транспортного средства выполняет автоматическое поведение транспортного средства, определенное на этапе S305 или на этапе S306. В частности, модуль 29 управления поведением транспортного средства выполняет либо автоматическое поведение транспортного средства, определенное согласно системной логике на этапе S305, либо задачу, определенную на S306, которая вводится водителем. Модуль 29 управления поведением транспортного средства выполняет автоматическое поведение транспортного средства посредством вывода управляющих сигналов, необходимого для выполнения автоматического поведения транспортного средства, в актуаторы 45. Модуль 29 управления поведением транспортного средства также вводит выполняемое автоматическое поведение транспортного средства в модуль 3 анализа поведения водителя.
[0079] Когда автоматическое поведение транспортного средства в силу этого выполняется, устройство 1 представления информации согласно настоящему варианту осуществления завершает контур автономного управления вождением.
[0080] Преимущества первого варианта осуществления
Как описано выше, устройство 1 представления информации согласно настоящему варианту осуществления запрашивает водителя на предмет того, чтобы выполнять ответное действие, чтобы проверять, готов ли или нет водитель принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную. Посредством такой проверки, готов ли или нет водитель принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную, автономное транспортное средство может продолжать безопасное движение, даже если автономное управление вождением переключается на управление вождением вручную.
[0081] В устройстве 1 представления информации согласно настоящему варианту осуществления ответное действие представляет собой действие, при котором водитель реагирует на запрос, для принятия решения относительно операции вождения автономного транспортного средства. Устройство 1 представления информации в силу этого может легко проверять то, что водитель готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0082] Устройство 1 представления информации согласно настоящему варианту осуществления принимает только утвердительную реакцию от водителя и, следовательно, требует только кнопки для приема утвердительного ввода. Это исключает необходимость наличия нескольких кнопок, обеспечивая упрощение конфигурации.
[0083] Альтернативно, устройство 1 представления информации согласно настоящему варианту осуществления принимает только отрицательную реакцию от водителя и, следовательно, требует только кнопки для приема отрицательного ввода. Это исключает необходимость нескольких кнопок, обеспечивая упрощение конфигурации.
[0084] Альтернативно, устройство 1 представления информации согласно настоящему варианту осуществления принимает как утвердительную реакцию, так отрицательную реакцию от водителя. Устройство 1 представления информации за счет этого всегда принимает реакцию независимо от того, является ли реакция утвердительной или отрицательной, и, следовательно, может выяснять намерения водителя наверняка.
[0085] Когда частота ответного действия ниже предварительно определенной частоты, устройство 1 представления информации согласно настоящему варианту осуществления задает водителю вопрос, в ответ на который реакция является обязательной. Это позволяет предотвращать продолжение автономного вождения транспортного средства без выполнения ответного действия и, следовательно, повышать уровень безопасности автономного транспортного средства.
[0086] Устройство 1 представления информации согласно настоящему варианту осуществления использует операцию с кнопкой водителем в качестве ответного действия, и, следовательно, может легко принимать решение водителя.
[0087] Устройство 1 представления информации согласно настоящему варианту осуществления прекращает автономное управление вождением, когда водитель не может выполнять ответное действие, и, следовательно, может обеспечивать безопасность автономного транспортного средства.
[0088] Устройство 1 представления информации согласно настоящему варианту осуществления запрашивает на предмет того, чтобы выполнять ответное действие каждый раз, когда проходит предварительно определенный период времени, или каждый раз, когда автономное транспортное средство выполняет предварительно определенное число операций оптимального регулирования скорости. Поскольку водитель в силу этого периодически запрашивается на предмет того, чтобы выполнять ответное действие, может повышаться безопасность при автономном управлении вождением.
[0089] Устройство 1 представления информации согласно настоящему варианту осуществления запрашивает водителя на предмет того, чтобы выполнять ответное действие при обнаружении того, что водитель не бодрствует или не смотрит вперед. Устройство 1 представления информации в силу этого может запрашивать водителя на предмет того, чтобы выполнять ответное действие, когда водитель имеет уменьшенный уровень сознательности, обеспечивая повышение безопасности автономного транспортного средства.
[0090] Устройство 1 представления информации согласно настоящему варианту осуществления задает момент времени для того, чтобы запрашивать водителя на предмет того, чтобы выполнять ответное действие, на основе состояния водителя и условий движения и внешней обстановки автономного транспортного средства. Устройство 1 представления информации, следовательно, может запрашивать водителя на предмет того, чтобы выполнять ответное действие в надлежащий момент времени согласно состоянию водителя и условиям движения и внешней обстановке автономного транспортного средства.
[0091] Если момент времени для того, чтобы переключаться с автономного управления вождением на управление вождением вручную, предварительно установлен, устройство 1 представления информации согласно настоящему варианту осуществления сокращает интервал запроса, чтобы выполнять ответное действие по мере того, как приближается предварительно установленный момент времени. Это гарантирует то, что водитель должен быть готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0092] Если водитель выполняет операцию вождения вручную, устройство 1 представления информации согласно настоящему варианту осуществления задерживает момент времени для того, чтобы запрашивать водителя на предмет того, чтобы выполнять ответное действие. Это сокращает число запросов ответных действий, уменьшая нагрузку на систему и нагрузку на водителя.
[0093] Устройство 1 представления информации согласно настоящему варианту осуществления отображает, при запросе рабочих характеристик ответного действия, рисунок, сформированный посредством пространственной частоты и временной частоты, не имеющий край яркости. Это обеспечивает возможность водителю распознавать запрос на ответное действие не посредством прямого взгляда на устройство 33 отображения, а посредством периферийного зрения.
[0094] При запросе ответного действия, устройство 1 представления информации согласно настоящему варианту осуществления обеспечивает водителю сенсорную стимуляцию синхронно с отображением изображения. Это гарантирует то, что водитель замечает запрос на ответное действие.
[0095] Второй вариант осуществления
Далее описывается устройство представления информации согласно второму варианту осуществления настоящего изобретения со ссылкой на чертежи. Идентичные компоненты в первом и втором вариантах осуществления обозначаются посредством идентичных ссылочных позиций и подробно не описываются повторно ниже.
[0096] Конфигурация устройства представления информации
Устройство представления информации согласно первому варианту осуществления выше запрашивает водителя на предмет того, чтобы нажимать кнопку в качестве ответного действия. Вместо этого, устройство представления информации согласно настоящему варианту осуществления запрашивает водителя на предмет того, чтобы принимать решение относительно операции вождения рассматриваемого транспортного средства и реагировать на запрос посредством произнесения текста.
[0097] Фиг. 8 является блок-схемой, показывающей конфигурацию устройства представления информации согласно настоящему варианту осуществления. Как показано на фиг. 8, устройство 81 представления информации согласно настоящему варианту осуществления отличается от устройства представления информации первого варианта осуществления наличием модуля 83 анализа речи вместо кнопочного переключателя 31. Ниже описывается отличие от первого варианта осуществления.
[0098] Модуль 83 анализа речи получает голос, произносимый водителем, например, через микрофон, и анализирует речь. Модуль 83 анализа речи затем обнаруживает то, какие слова водитель произносит, и выводит речевую информацию. Модуль 83 анализа речи также анализирует, например, скорость, звучание и варьирование основного тона речи водителя.
[0099] Модуль 3 анализа поведения водителя обнаруживает слово(а), произнесенное водителем, на основе речевой информации, выведенной посредством модуля 83 анализа речи, и анализирует содержимое речи или разговора водителем.
[0100] Модуль 5 записи реакций водителя записывает речевую информацию, выведенную посредством модуля 83 анализа речи, и записывает результат анализа посредством модуля 3 анализа поведения водителя, т.е. содержимое речи или разговора водителем.
[0101] Модуль 7 определения ответных действий определяет ответное действие для проверки, готов ли или нет водитель транспортного средства принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную. В настоящем варианте осуществления, модуль 7 определения ответных действий запрашивает, в качестве ответного действия, водителя на предмет того, чтобы принимать решение относительно операции вождения автономного транспортного средства и реагировать посредством произнесения текста. Конкретный способ определения ответного действия является идентичным способу в первом варианте осуществления.
[0102] Модуль 9 управления ответными действиями включает в себя систему обработки разговоров для проведения разговора с водителем. Система обработки разговоров может проводить разговор с водителем об окружающей обстановке и операциях вождения посредством задания вопросов водителю и ответа на слова водителя. Что касается задания момента времени для того, чтобы запрашивать ответное действие, модуль 9 управления ответными действиями сокращает интервал запроса водителя на предмет того, чтобы выполнять ответное действие, когда водитель произносит несоответствующую речь или диалог.
[0103] Процедура контура управления ответными действиями
Далее описывается процедура контура управления ответными действиями, выполняемая посредством устройства 81 представления информации согласно настоящему варианту осуществления. Контур управления ответными действиями настоящего варианта осуществления является идентичным блок-схеме последовательности операций способа в первом варианте осуществления, показанной на фиг. 3. Таким образом, подробно описываются только этапы, которые выполняют обработку, отличающуюся от обработки в первом варианте осуществления.
[0104] На блок-схеме последовательности операций способа на фиг. 3, после того, как ответное действие определяется посредством обработки на этапах S101-S105, момент времени для того, чтобы запрашивать ответное действие, определяется на этапе S106. Затем когда момент времени для того, чтобы запрашивать ответное действие, наступает на этапе S107, модуль 9 управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие, на этапе S108. В частности, модуль 9 управления ответными действиями спрашивает водителя через изображение на устройстве 33 отображения или сообщение из динамика 37 на предмет того, следует ли или нет выполнять операцию вождения, определенную посредством модуля 7 определения ответных действий, и указывает водителю произносить текст. Например, модуль 9 управления ответными действиями задает водителю такой вопрос, как "Хотите перейти на правую полосу движения?" или "Хотите повысить скорость?" Водитель реагирует на вопрос посредством произнесения текста и за счет этого выполняет ответное действие. Например, водитель выполняет ответное действие посредством произнесения утвердительного слова, такого как "Да", или отрицательного слова, такого как "Нет".
[0105] Модуль 9 управления ответными действиями также может запрашивать испытание на предмет ловушек, как описано в первом варианте осуществления. Например, модуль 9 управления ответными действиями задает очевидно несоответствующий вопрос, такой как "Хотите остановиться на пешеходном переходе?", в ответ на который водитель обязательно произносит отрицательное слово "Нет". Когда водитель ничего не произносит в испытании на предмет ловушек, модуль 9 управления ответными действиями определяет то, что водитель игнорирует запрос на то, чтобы выполнять ответное действие, или находится в состоянии, не допускающем выполнение ответного действия, и предупреждает водителя посредством выдачи предупреждающего звука и мигания экрана отображения.
[0106] Затем, на этапе S109, модуль 9 управления ответными действиями определяет, выполнил ли водитель ответное действие или нет. Ниже подробнее поясняется обработка определения выполнения ответных действий со ссылкой на фиг. 9.
[0107] После этого, выполняется обработка на этапах S110-S112, и контур управления ответными действиями согласно настоящему варианту осуществления завершается.
[0108] Процедура обработки определения выполнения ответных действий
Далее изложена процедура обработки определения выполнения ответных действий, выполняемая на этапе S109 контура управления ответными действиями, описанного выше, со ссылкой на блок-схему последовательности операций способа на фиг. 9.
[0109] Как показано на фиг. 9, на этапе S401, модуль 9 управления ответными действиями считывает данные, полученные посредством модуля 83 анализа речи, из модуля 5 записи реакций водителя. Эти данные обеспечивают возможность модулю 9 управления ответными действиями распознавать содержимое речи водителя.
[0110] На этапе S402, модуль 9 управления ответными действиями определяет, произносит ли водитель текст или нет. Модуль 9 управления ответными действиями переходит к этапу S403, если водитель произносит текст, и переходит к этапу S404, если водитель не произносит текст.
[0111] На этапе S403, модуль 9 управления ответными действиями определяет, является ли речь водителя относительно ответного действия утвердительной или нет. Модуль 9 управления ответными действиями переходит к этапу S405, если речь является утвердительной, и переходит к этапу S406, если речь не является утвердительной.
[0112] На этапе S405, модуль 9 управления ответными действиями выводит индикатор того, что ответное действие выполнено, и определяет то, что водитель готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0113] На этапе S406, модуль 9 управления ответными действиями выполняет автоматическое поведение транспортного средства, определенное посредством модуля 27 определения автоматического поведения транспортного средства, поскольку речь водителя не является утвердительной, и выводит индикатор того, что ответное действие не выполнено. Модуль 9 управления ответными действиями определяет то, что водитель не готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0114] На этапе 404, на который переходит модуль 9 управления ответными действиями после определения на этапе S402 того, что водитель не произносит текст, модуль 9 управления ответными действиями определяет, представляет ли собой ответное действие, запрашиваемое от водителя, испытание на предмет ловушек или нет. Модуль 9 управления ответными действиями переходит к этапу S406, если ответное действие представляет собой испытание на предмет ловушек, и переходит к этапу S407, если ответное действие не представляет собой испытание на предмет ловушек.
[0115] На этапе S406, модуль 9 управления ответными действиями выполняет автоматическое поведение транспортного средства, определенное посредством модуля 27 определения автоматического поведения транспортного средства, поскольку водитель не произносит текст, несмотря на испытание на предмет ловушек, и выводит индикатор того, что ответное действие не выполнено. Модуль 9 управления ответными действиями определяет то, что водитель не готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0116] На этапе S407, модуль 9 управления ответными действиями выполняет операцию вождения по умолчанию, такую как следование за впереди идущим автомобилем, поскольку ответное действие не представляет собой испытание на предмет ловушек, и водитель не произносит текст.
[0117] После такого вывода индикатора того, что ответное действие выполнено или не выполнено, модуль 9 управления ответными действиями завершает обработку определения выполнения ответных действий и возвращается в контур управления ответными действиями.
[0118] Процедура контура автономного управления вождением
Контур автономного управления вождением согласно настоящему варианту осуществления является идентичным контуру автономного управления вождением первого варианта осуществления и, следовательно, подробно не описывается здесь.
[0119] Преимущества второго варианта осуществления
Как подробно описано выше, устройство 81 представления информации согласно настоящему варианту осуществления запрашивает, в качестве ответного действия, водителя на предмет того, чтобы принимать решение относительно операции вождения автономного транспортного средства и реагировать посредством произнесения текста. Устройство 81 представления информации в силу этого может легко проверять, готов ли или нет водитель принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0120] Когда частота речи или диалога водителя ниже предварительно определенной частоты, устройство 81 представления информации согласно настоящему варианту осуществления задает водителю вопрос, который требует от водителя обязательно произносить текст или вести диалог. Это позволяет предотвращать продолжение автономного вождения транспортного средства без речи или диалога, за счет этого повышая уровень безопасности автономного транспортного средства.
[0121] Когда водитель произносит несоответствующую речь или диалог, устройство 81 представления информации согласно настоящему варианту осуществления сокращает интервал запроса водителя на предмет того, чтобы выполнять ответное действие. Это гарантирует безопасность, даже когда водитель произносит несоответствующую речь или диалог.
[0122] Третий вариант осуществления
Далее описывается устройство представления информации согласно третьему варианту осуществления со ссылкой на чертежи. Идентичные компоненты в первом-третьем вариантах осуществления обозначаются посредством идентичных ссылочных позиций и подробно не описываются повторно ниже.
[0123] Конфигурация устройства представления информации
Устройство представления информации согласно второму варианту осуществления запрашивает водителя на предмет того, чтобы произносить текст в качестве ответного действия. Вместо этого, устройство представления информации согласно настоящему варианту осуществления запрашивает, в качестве ответного действия, водителя на предмет того, чтобы вести диалог относительно операции вождения автономного транспортного средства.
[0124] Конфигурация устройства представления информации согласно настоящему варианту осуществления является идентичной конфигурации второго варианта осуществления, показанной на фиг. 8, и, следовательно, подробно не описывается повторно здесь.
[0125] Процедура контура управления ответными действиями
Далее описывается процедура контура управления ответными действиями, выполняемая посредством устройства представления информации согласно настоящему варианту осуществления. Контур управления ответными действиями настоящего варианта осуществления является идентичным блок-схеме последовательности операций способа в первом варианте осуществления, показанном на фиг. 3. Таким образом, подробно описываются только этапы, которые выполняют обработку, отличающуюся от обработки в первом и втором вариантах осуществления.
[0126] На блок-схеме последовательности операций способа на фиг. 3, после того, как ответное действие определяется посредством обработки на этапах S101-S105, момент времени для того, чтобы запрашивать ответное действие, определяется на этапе S106. Затем когда момент времени для того, чтобы запрашивать ответное действие, наступает на этапе S107, модуль 9 управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие, на этапе S108. В частности, модуль 9 управления ответными действиями спрашивает водителя через изображение на устройстве 33 отображения и сообщение из динамика 37 на предмет того, следует ли или нет выполнять операцию вождения, определенную посредством модуля 7 определения ответных действий, и указывает водителю вести диалог. Например, если имеется транспортное средство, едущее медленно впереди, модуль 9 управления ответными действиями спрашивает "Впереди медленно едущий автомобиль". Водитель реагирует на это посредством произнесения "Да" или чего-то подобного. Модуль 9 управления ответными действиями затем составляет такое предложение, как "Хотите перейти на правую полосу движения и обогнать впереди идущий автомобиль, или хотите снизить скорость?" Водитель реагирует посредством формирования утвердительной реакции, такой как "Я обгоню автомобиль" или "Я снижаю скорость", и за счет этого выполняет ответное действие.
[0127] Перед запросом на предмет того, чтобы выполнять ответное действие, модуль 9 управления ответными действиями выполняет диалог об окружающей обстановке. Например, модуль 9 управления ответными действиями выполняет диалог посредством спрашивания чего-то вроде "Видимо, в пункте назначения плохая погода", "Начинается дождь" или "Кажется, что движение протекает плавно". Водитель выполняет диалог посредством произнесения чего-то вроде "Прогноз погоды говорит, что пойдет снег?", "Давайте просто продолжим движение" или "Во сколько я туда попаду?" в ответ на эти вопросы.
[0128] Модуль 9 управления ответными действиями также может запрашивать испытание на предмет ловушек, как описано в первом варианте осуществления. Например, модуль 9 управления ответными действиями задает очевидно несоответствующий вопрос, такой как "Хотите остановиться на пешеходном переходе?", в ответ на который водитель обязательно реагирует отрицательным словом "Нет". Когда водитель не реагирует на испытание на предмет ловушек, модуль 9 управления ответными действиями определяет то, что водитель игнорирует запрос на то, чтобы выполнять ответное действие, или находится в состоянии, не допускающем выполнение ответного действия, и предупреждает водителя посредством выдачи предупреждающего звука и мигания экрана отображения.
[0129] Затем, на этапе S109, модуль 9 управления ответными действиями определяет, выполняет ли водитель ответное действие или нет. Ниже подробнее поясняется обработка определения выполнения ответных действий со ссылкой на фиг. 10.
[0130] После этого, выполняется обработка на этапах S110-S112, и контур управления ответными действиями согласно настоящему варианту осуществления завершается.
[0131] Процедура обработки определения выполнения ответных действий
Далее изложена процедура обработки определения выполнения ответных действий, выполняемая на этапе S109 контура управления ответными действиями, описанного выше, со ссылкой на блок-схему последовательности операций способа на фиг. 10.
[0132] Как показано на фиг. 10, на этапе S501, модуль 9 управления ответными действиями считывает данные, полученные посредством модуля 83 анализа речи, из модуля 5 записи реакций водителя. Эти данные обеспечивают возможность модулю 9 управления ответными действиями распознавать содержимое диалога водителя.
[0133] На этапе S502, модуль 9 управления ответными действиями определяет, на основе содержимого диалога, распознанного на этапе S501, способен ли водитель на ведение диалога или нет. Модуль 9 управления ответными действиями переходит к этапу S503, когда водитель способен на ведение диалога, и переходит к этапу S507, когда водитель не способен на ведение диалога.
[0134] На этапе S503, на основе содержимого диалога, распознанного на этапе S501, модуль 9 управления ответными действиями оценивает уровень осведомленности водителя об окружающей обстановке. Например, если водитель ведет обычный диалог об окружающей обстановке, модуль 9 управления ответными действиями оценивает то, что водитель имеет высокий уровень осведомленности об окружающей обстановке. Если водитель не реагирует на диалог или ведет несоответствующий диалог, модуль 9 управления ответными действиями определяет то, что водитель имеет низкий уровень осведомленности об окружающей обстановке.
[0135] На этапе S504, модуль 9 управления ответными действиями определяет, имеет ли водитель высокий уровень осведомленности об окружающей обстановке или нет. Модуль 9 управления ответными действиями переходит к этапу S505, когда водитель имеет высокий уровень осведомленности об окружающей обстановке, и возвращается на S501 для того, чтобы повторять диалог, когда водитель имеет низкий уровень осведомленности об окружающей обстановке.
[0136] На этапе S505, модуль 9 управления ответными действиями анализирует содержимое диалога водителя и определяет, проводит ли водитель утвердительный диалог относительно ответного действия или нет. Модуль 9 управления ответными действиями переходит к этапу S506, когда водитель проводит утвердительный диалог, и переходит к этапу S507, когда водитель не проводит утвердительный диалог.
[0137] На этапе S506, на который переходит модуль 9 управления ответными действиями после определения того, что водитель проводит утвердительный диалог, модуль 9 управления ответными действиями выводит индикатор того, что ответное действие выполнено, и определяет то, что водитель готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0138] С другой стороны, на этапе S507, на который переходит модуль 9 управления ответными действиями после определения того, что водитель не способен на ведение диалога, или того, что водитель не проводит утвердительный диалог, модуль 9 управления ответными действиями выводит индикатор того, что ответное действие не выполнено, и определяет то, что водитель не готов принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0139] После такого вывода индикатора того, что ответное действие выполнено или не выполнено, модуль 9 управления ответными действиями завершает обработку определения выполнения ответных действий и возвращается в контур управления ответными действиями.
[0140] Процедура контура автономного управления вождением
Контур автономного управления вождением согласно настоящему варианту осуществления является идентичным контуру автономного управления вождением первого варианта осуществления и, следовательно, подробно не описывается здесь.
[0141] Преимущества третьего варианта осуществления
Как подробно описано выше, устройство представления информации согласно настоящему варианту осуществления запрашивает водителя на предмет того, чтобы вести диалог относительно операции вождения автономного транспортного средства в качестве ответного действия. Устройство представления информации в силу этого может легко проверять, готов ли или нет водитель принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0142] Устройство представления информации согласно настоящему варианту осуществления повторяет диалог при определении, на основе диалога с водителем, того, что водитель имеет низкий уровень осведомленности об окружающей обстановке. Поскольку повторяющийся диалог поднимает уровень осведомленности водителя об окружающей обстановке, можно делать водителя готовым принимать управление на себя, когда автономное управление вождением переключается на управление вождением вручную.
[0143] Когда частота речи или диалога водителя ниже предварительно определенной частоты, устройство представления информации согласно настоящему варианту осуществления задает водителю вопрос, в ответ на который речь или диалог является обязательным. Это позволяет предотвращать продолжение автономного вождения транспортного средства без речи или диалога, за счет этого повышая уровень безопасности автономного транспортного средства.
[0144] Когда водитель произносит несоответствующую речь или диалог, устройство представления информации согласно настоящему варианту осуществления сокращает интервал запроса водителя на предмет того, чтобы выполнять ответное действие. Это гарантирует безопасность, даже если водитель произносит несоответствующую речь или диалог.
[0145] Следует отметить, что вышеописанные варианты осуществления являются только примерами настоящего изобретения. Таким образом, настоящее изобретение не ограничено этими вариантами осуществления и может модифицироваться различными способами согласно проектному решению при условии, что такие варианты осуществления не отступают от объема настоящего изобретения.
Список ссылочных позиций
[0146] 1, 81 – устройство представления информации
3 – модуль анализа поведения водителя
5 – модуль записи реакций водителя
7 – модуль определения ответных действий
9 – модуль управления ответными действиями
11 – модуль ввода задач
13 – модуль формирования отображаемых изображений
15 – модуль управления предупреждениями
17 – модуль формирования аудио
21 – модуль распознавания окружающей обстановки
23 – модуль управления маршрутами
25 – модуль формирования автоматического поведения транспортного средства
27 – модуль определения автоматического поведения транспортного средства
29 – модуль управления поведением транспортного средства
31 – кнопочный переключатель
33 – устройство отображения
35 – модуль формирования предупреждающих звуков
37 – динамик
41 – группа датчиков
43 – база данных
45 – актуаторы
83 – модуль анализа речи
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ И СПОСОБ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ | 2014 |
|
RU2669501C2 |
| УСТРОЙСТВО ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ КАСАТЕЛЬНО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668149C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2021 |
|
RU2765067C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2019 |
|
RU2742459C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2724938C1 |
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ | 2017 |
|
RU2678789C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И ЭНЕРГОНЕЗАВИСИМЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ, НА КОТОРОМ ЗАПИСАНА ПРОГРАММА | 2019 |
|
RU2719511C1 |
| АРХИТЕКТУРА ДЛЯ ПРЕДСТАВЛЕНИЯ И КОНТРОЛЯ ИНФОРМАЦИИ НА АВТОМАТИЗИРОВАННОМ ПРЕДПРИЯТИИ ПАРКОВКИ И ХРАНЕНИЯ | 2003 |
|
RU2331100C2 |
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ (ВАРИАНТЫ) | 2018 |
|
RU2707855C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754470C1 |
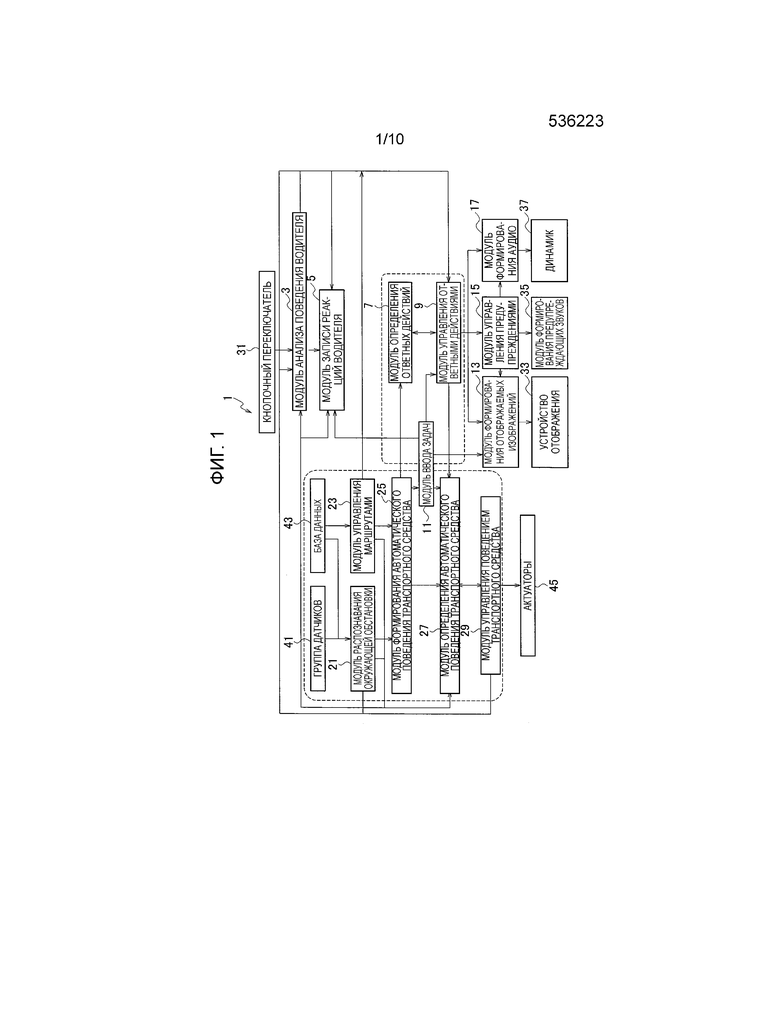
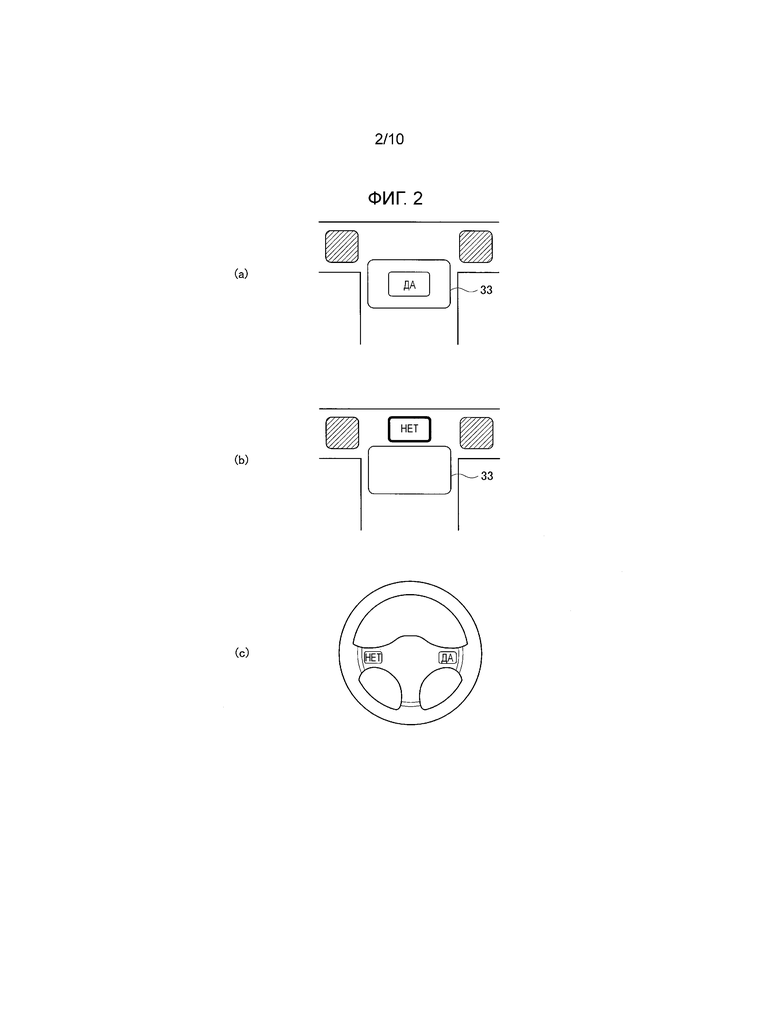
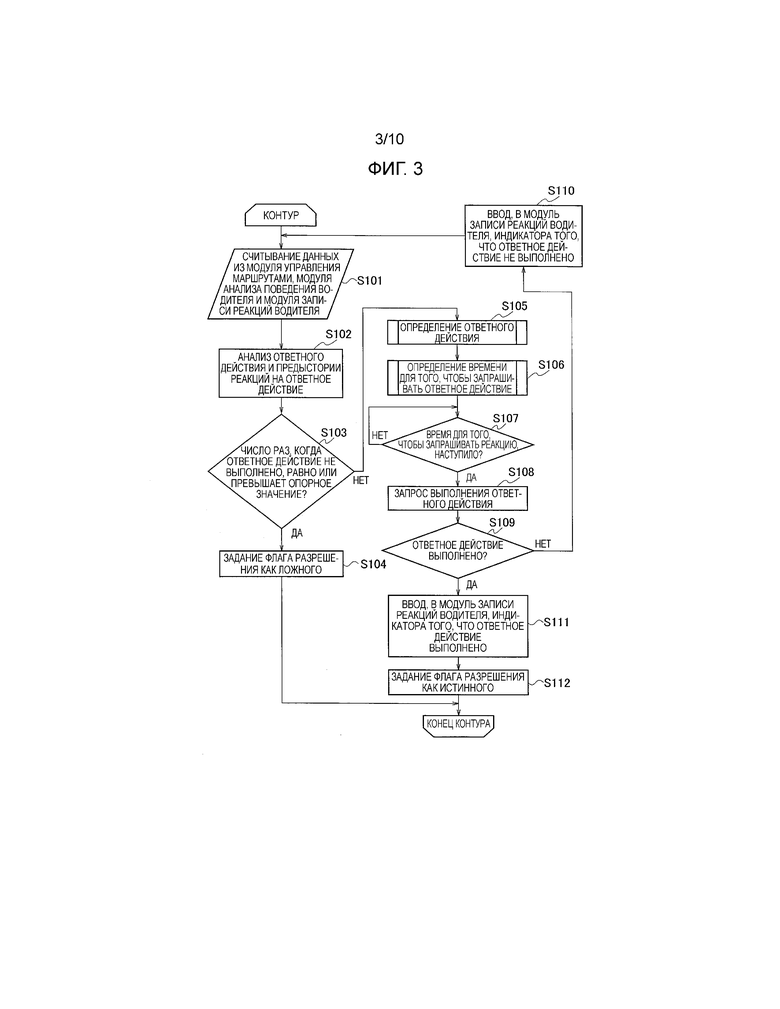
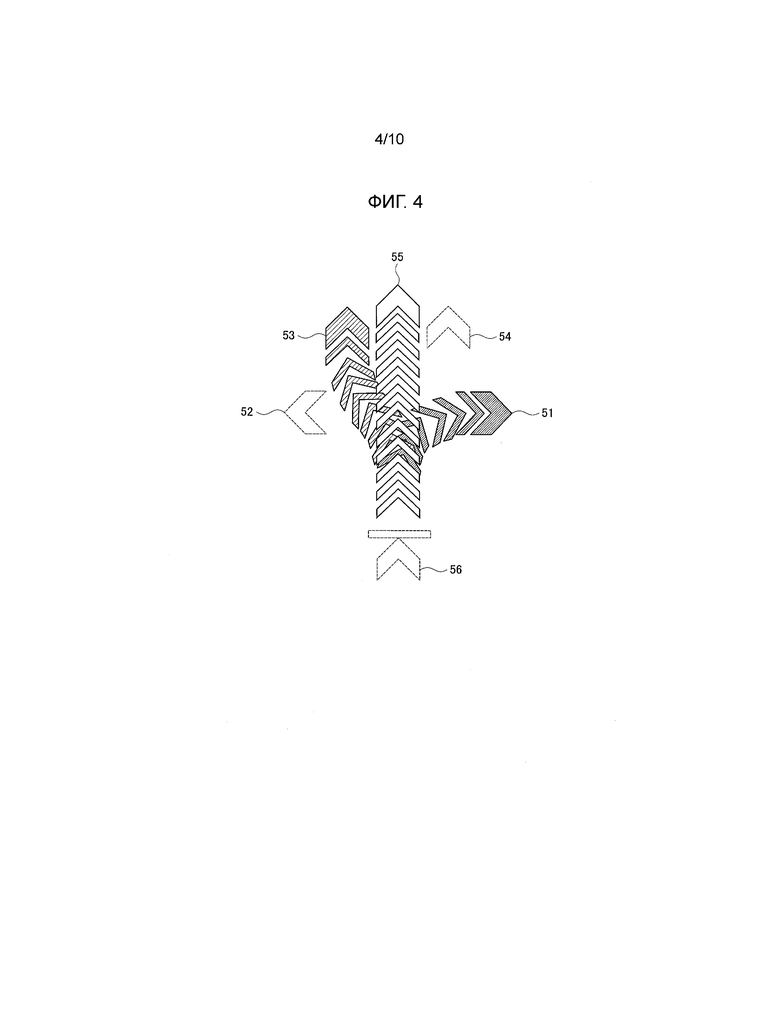
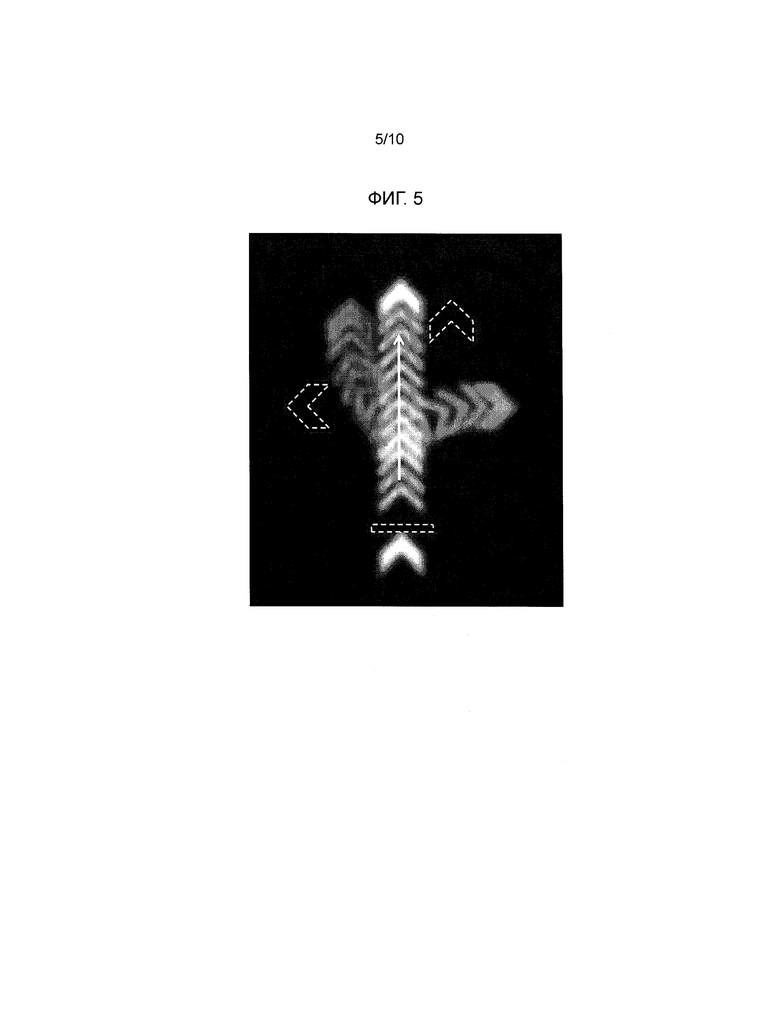
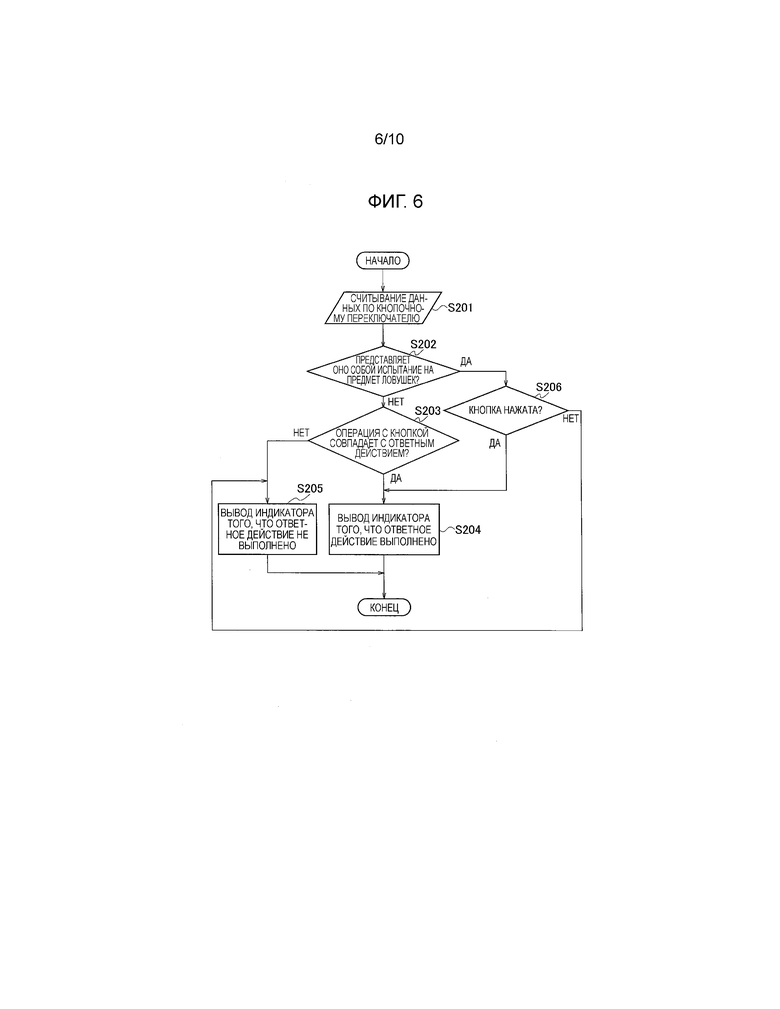
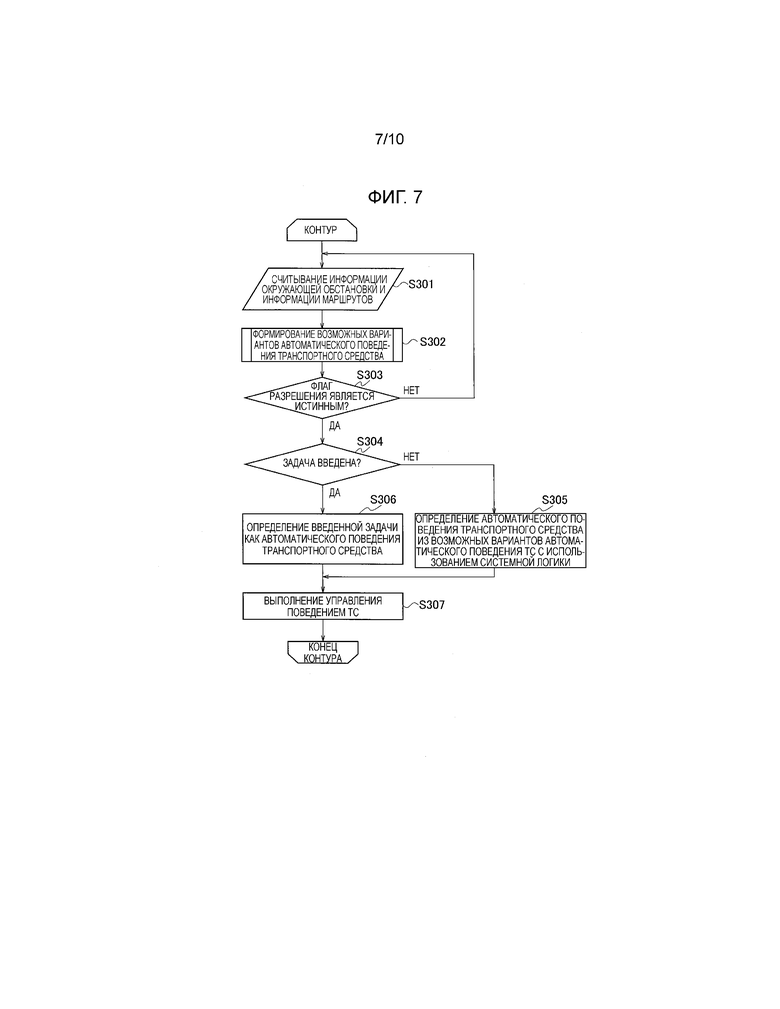
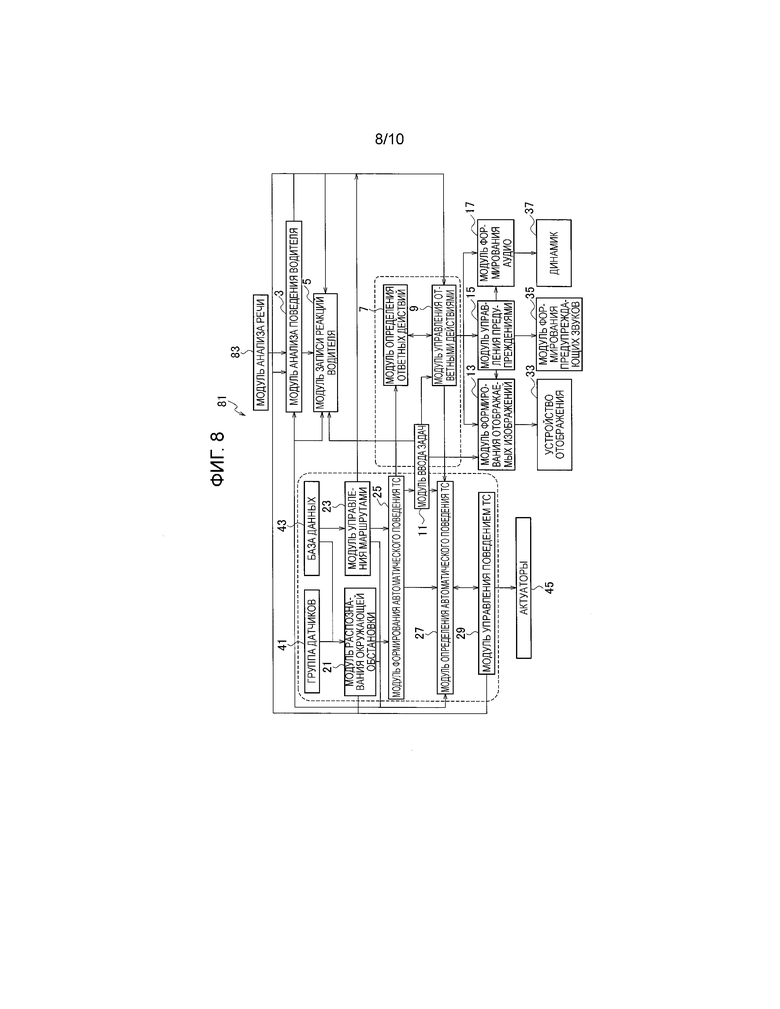
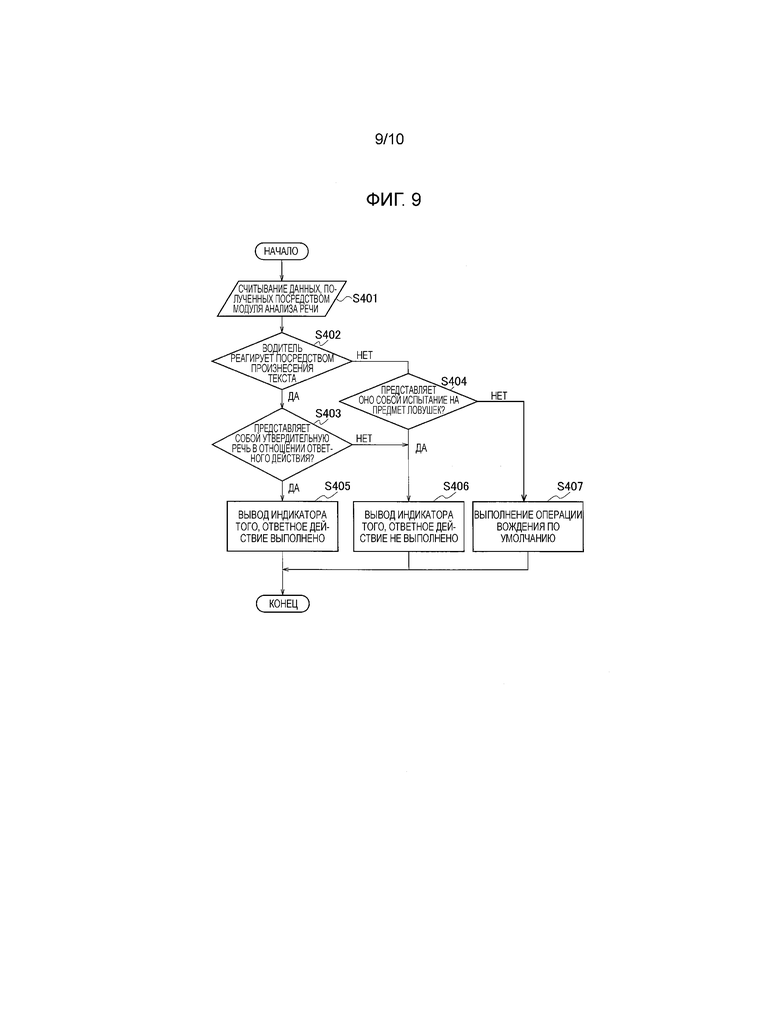
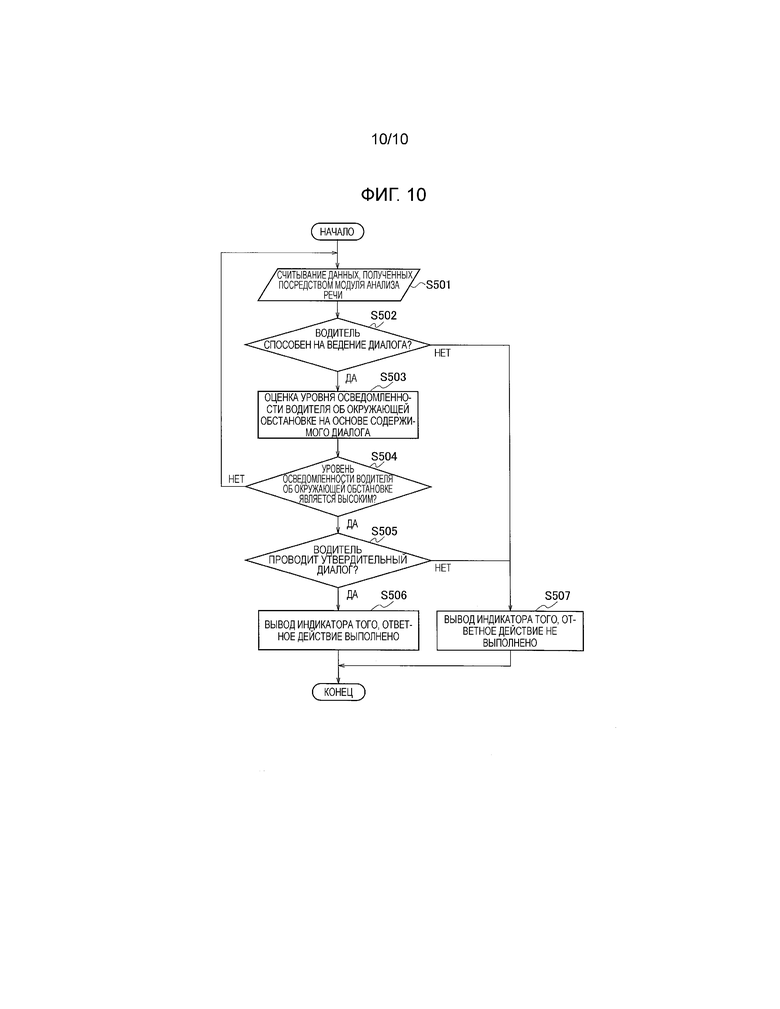
Изобретение относится к системам управления транспортным средством. Устройство представления информации для использования в автономном транспортном средстве, выполненном с возможностью переключения между автономным управлением и управлением вручную. Устройство представления информации содержит модуль определения ответных действий, модуль управления ответными действиями и модуль анализа поведения водителя. Ответное действие представляет собой действие, при котором водитель реагирует на запрос на принятие решения относительно операции вождения автономного транспортного средства. Когда момент времени для того, чтобы переключаться с автономного управления вождением на управление вождением вручную, предварительно определен, модуль управления ответными действиями сокращает интервал для запроса водителя на предмет того, чтобы выполнять ответное действие по мере того, как приближается предварительно определенный момент времени. Достигается повышение безопасности управления транспортным средством. 2 н. и 17 з.п. ф-лы, 10 ил. 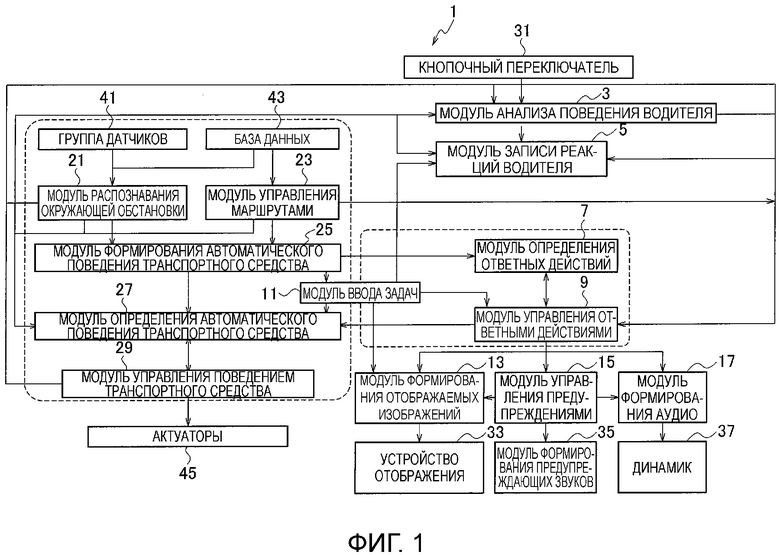
1. Устройство представления информации для использования в автономном транспортном средстве, выполненном с возможностью переключения между автономным управлением вождением, при котором транспортное средство управляется согласно автономному управлению вождением, и управлением вождением вручную, при котором транспортное средство управляется водителем, причем устройство представления информации содержит:
модуль определения ответных действий, выполненный с возможностью определять ответное действие, которое должно выполняться водителем автономного транспортного средства, чтобы поддерживать автономное управление вождением посредством определения того, что водитель разрешает автономное управление вождением;
модуль управления ответными действиями, выполненный с возможностью осуществлять управление для запроса водителя на предмет того, чтобы выполнять ответное действие, определенное посредством модуля определения ответных действий; и
модуль анализа поведения водителя, выполненный с возможностью обнаруживать ответное действие, выполняемое водителем, при этом
ответное действие представляет собой действие, при котором водитель реагирует на запрос на принятие решения относительно операции вождения автономного транспортного средства,
когда момент времени для того, чтобы переключаться с автономного управления вождением на управление вождением вручную, предварительно определен, модуль управления ответными действиями сокращает интервал для запроса водителя на предмет того, чтобы выполнять ответное действие по мере того, как приближается предварительно определенный момент времени.
2. Устройство представления информации по п. 1, в котором модуль определения ответных действий получает возможный вариант автоматического поведения транспортного средства, сформированный в соответствии с системной логикой системы автономного вождения, и определяет осуществимую операцию вождения с учетом окружающей обстановки автономного транспортного средства, в качестве ответного действия, из возможного варианта автоматического поведения транспортного средства.
3. Устройство представления информации по п. 1 или 2, в котором модуль управления ответными действиями принимает только утвердительную реакцию от водителя.
4. Устройство представления информации по п. 1 или 2, в котором модуль управления ответными действиями принимает только отрицательную реакцию от водителя.
5. Устройство представления информации по п. 1 или 2, в котором модуль управления ответными действиями принимает как утвердительную реакцию, так отрицательную реакцию от водителя.
6. Устройство представления информации по любому из пп. 1-5, в котором модуль управления ответными действиями задает водителю вопрос, в ответ на который реакция является обязательной, когда частота ответного действия ниже предварительно определенной частоты.
7. Устройство представления информации по любому из пп. 1-6, в котором ответное действие представляет собой операцию с кнопкой водителем.
8. Устройство представления информации по п. 1 или 2, в котором ответное действие представляет собой ответную речь водителя или диалог с водителем.
9. Устройство представления информации по п. 8, в котором, когда водитель имеет низкий уровень осведомленности об окружающей обстановке в диалоге с водителем, диалог с водителем повторяется.
10. Устройство представления информации по п. 8 или 9, в котором, когда частота речи или диалога водителя ниже предварительно определенной частоты, вопрос, в ответ на который речь или диалог является обязательным, задается водителю.
11. Устройство представления информации по любому из пп. 1-10, в котором модуль управления ответными действиями прекращает автономное управление вождением автономного транспортного средства, когда водитель не выполняет ответное действие.
12. Устройство представления информации по любому из пп. 1-11, в котором модуль управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие каждый раз, когда проходит предварительно определенный период времени, или каждый раз, когда автономное транспортное средство выполняет предварительно определенное число операций управления вождением.
13. Устройство представления информации по любому из пп. 1-12, в котором модуль управления ответными действиями запрашивает водителя на предмет того, чтобы выполнять ответное действие при обнаружении того, что водитель не бодрствует или не смотрит вперед.
14. Устройство представления информации по любому из пп. 1-13, в котором модуль управления ответными действиями задает момент времени для того, чтобы запрашивать водителя на предмет того, чтобы выполнять ответное действие, на основе состояния водителя и состояния движения и внешней обстановки автономного транспортного средства.
15. Устройство представления информации по любому из пп. 1-14, в котором модуль управления ответными действиями задерживает момент времени для того, чтобы запрашивать водителя на предмет того, чтобы выполнять ответное действие, когда водитель вручную управляет автономным транспортным средством.
16. Устройство представления информации по любому из пп. 8-15, в котором модуль управления ответными действиями сокращает интервал запроса водителя на предмет того, чтобы выполнять ответное действие, когда водитель произносит несоответствующую речь или диалог.
17. Устройство представления информации по любому из пп. 1-16, в котором при запросе на предмет того, чтобы выполнять ответное действие, модуль управления ответными действиями отображает рисунок, сформированный посредством пространственной частоты и временной частоты, не имеющий край яркости.
18. Устройство представления информации по любому из пп. 1-17, в котором при запросе на предмет того, чтобы выполнять ответное действие, модуль управления ответными действиями обеспечивает водителю сенсорную стимуляцию синхронно с отображением изображения.
19. Способ представления информации, осуществляемый устройством представления информации для использования в автономном транспортном средстве, выполненном с возможностью переключения между автономным управлением вождением, при котором транспортное средство управляется согласно автономному управлению вождением, и управлением вождением вручную, при котором транспортное средство управляется водителем, причем способ представления информации содержит этапы, на которых:
определяют ответное действие для поддержания автономного управления вождением посредством определения того, что водитель автономного транспортного средства разрешает автономное управление вождением;
осуществляют управление для запроса водителя на предмет того, чтобы выполнять определенное ответное действие; и
обнаруживают ответное действие, выполняемое водителем, при этом
ответное действие представляет собой действие, при котором водитель реагирует на запрос на принятие решения относительно операции вождения автономного транспортного средства,
когда момент времени для того, чтобы переключаться с автономного управления вождением на управление вождением вручную, предварительно определен, сокращают интервал для запроса водителя на предмет того, чтобы выполнять ответное действие по мере того, как приближается предварительно определенный момент времени.
| JP 2008290680, 04.12.2008 | |||
| JP H11185200 A, 09.07.1999 | |||
| JP 2009098061 A, 07.05.2009 | |||
| RU 2008141225 A, 27.05.2010. |

