ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка заявляет преимущество предварительной патентной заявки США №61/488879, поданной 23 мая 2011 г., которая включена в настоящий документ посредством ссылки во всей ее полноте, и приоритет которой заявляется.
УРОВЕНЬ ТЕХНИКИ
[0002] За прошедшие несколько лет существенно увеличились операции по добыче нефти и газа в новых регионах, таких как Арктика. Эта увеличивающаяся активность делает все более вероятным, что в этих регионах будут использоваться фиксированные или плавучие производственные платформы, буровые корабли и другие структуры. Беспокойство для этих типов структур в таких регионах вызывает возможность повреждения их неконтролируемыми объектами, плавающими или затопленными в воде, такими как плавающие обломки судна, тонущий груз, мусор, айсберги, льдины, и другие угрозы ("морские препятствия"). В ледовых районах, например, большие айсберги и мощные льдины могут проходить через области разведки, добычи и бурения. Хотя производственные суда могут быть спроектированы так, чтобы выдерживать некоторые воздействия от таких морских препятствий, все же суда могут иметь пределы того, как долго они могут выдержать воздействия таких морских препятствий, и какова сила потенциальных воздействий, которые они могут выдержать безопасно.
[0003] По этим причинам операторы на производственном судне или другой структуре должны будут ожидать угроз со стороны препятствий и защищаться от них, и таким образом производственное судно сможет быть достаточно защищено. Если условия становятся слишком опасными, операторы, возможно, также должны приостановить операции и отодвинуть производственное судно, пока возврат к нормальному функционированию не станет безопасным. Возможность сделать это надежно может иметь исключительное значение для операторов.
[0004] Предмет настоящего раскрытия направлен на преодоление или по меньшей мере уменьшение влияния одной или более проблем, сформулированных выше.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Система и способ мониторинга и защиты от морской угрозы защищают целевую морскую структуру, проводящую "установочные" операции в регионах, имеющих морские препятствия, которые могут угрожать структуре. Вообще, целевая морская структура может быть производственным судном, производственной платформой, буровым кораблем, устьевым отверстием скважины, стояком, судном сейсморазведки или другой морской структурой, используемой в бурении, добыче или в операциях поисково-разведочных работ в море и т.п. Структура может быть плавучей или фиксированной и может быть постоянно или временно прикреплена ко дну моря. Следовательно, структура может быть установлена в определенной точке (то есть, "установлена") для бурения, загрузки танкера, ремонтных работ на скважине, подводного обслуживания или других таких операций по бурению или добыче. Для поисково-разведочных работ структура, такая как судно сейсморазведки, может пересекать область поисково-разведочных работ по запланированному (то есть, "установленному") маршруту для сбора сейсмических данных или производства других поисково-разведочных работ.
[0006] Ледовый регион, такой как Арктика, имеет айсберги, льдины, и другие препятствия, которые плавают в морских водах и переносятся течениями и под влиянием других погодных условий, и такие препятствия могут угрожать структуре, проводящей установочные операции (например, судну, установленному в определенной точке для бурения или добычи, или судну с запланированным маршрутом для поисково-разведочных работ) в таком регионе. Другие водные пути, такие как океаны, моря, озера, реки, устья и прибрежные районы, могут иметь плавающие обломки судов, тонущий груз и мусор, которые плавают в воде и переносятся течениями и под влиянием других погодных условий. Точно так же, как лед может угрожать операциям, эти морские препятствия могут угрожать "установленной" структуре, когда она проводит стационарные или запланированные операции на водных путях.
[0007] Для того чтобы работать с морскими угрозами для целевой морской структуры, компьютерная система мониторинга имеет клиент-серверную архитектуру и имеет различные компоненты и процессы, распределенные в среде вокруг целевого судна. Система использует средства связи, пользовательские интерфейсы и источники данных для того, чтобы идентифицировать морские угрозы и препятствия, находящиеся в непосредственной близости от целевого судна.
[0008] По мере выполнения операций, например, система и ее операторы контролируют положения и перемещения идентифицированных морских препятствий в течение времени относительно целевого судна и прогнозируют любые потенциальные угрозы целевому судну. Прогнозы угроз могут быть основаны на прошлых, текущих и прогнозируемых значениях переменных, включая, но не ограничиваясь этим, пути перемещения морских препятствий, течения, скорости и направления ветра, высоту волны, другие погодные условия, выполняемые на целевом судне операции, и другие соображения. Когда угроза спрогнозирована, система и ее операторы планируют ответ на угрозу, который может включать в себя развертывание по меньшей мере одного ресурса в ответ на спрогнозированную угрозу. Это планирование может использовать много экранов пользовательского интерфейса, которые позволяют системным операторам просматривать, организовывать, отслеживать и трассировать как морские препятствия, так и ресурсы, находящиеся в непосредственной близости от целевого судна.
[0009] Вообще, ресурсы могут быть управляемыми человеком либо работающими без обслуживающего персонала судами обеспечения, маяками, аппаратами с дистанционным управлением, самолетами, и т.п. При планировании развертывания судна обеспечения, например, система может сгенерировать трассу для судна обеспечения так, чтобы отслеживать морское препятствие или прицепиться к морскому препятствию, чтобы отклонить или разбить морские препятствия с тем, чтобы предотвратить или минимизировать их потенциальное воздействие на целевое судно. При планировании развертывания маяка, имеющего транспондер спутниковой системы геопозиционирования GPS, например, система может выбрать, какое именно морское препятствие может нуждаться в таком наблюдении и слежении.
[0010] В целом система мониторинга защищает целевое судно в режиме реального времени путем централизованного мониторинга окружающих условий и любых текущих активностей. Например, система мониторинга может отслеживать положения морских препятствий, отслеживать условия окружающей среды, прогнозировать перемещения морских препятствий, организовывать экспедиции для разведки морских препятствий, организовывать ледокольные маршруты для судов, размещать и отслеживать маяки на морских препятствиях в режиме реального времени и выдавать аварийные сигналы на основе прогноза перемещения объектов вокруг целевого судна. Для того чтобы в конечном счете работать с угрозами, системные операторы на целевом судне и судах обеспечения могут выполнять различные задачи по сбору информации и по управлению ответами на различные угрозы. Некоторые из этих задач включают в себя разведку угроз, мониторинг или маркирование конкретных угроз, разрушение угроз и активное изменение пути угроз.
[0011] Очевидно, что владение корректной информацией полезно при принятии решений по защите целевого судна. Для того чтобы достичь этой цели, система использует оперативное управление данными, передачу данных, отслеживание судна и отслеживание объектов. Для того чтобы затем облегчить анализ и принятие решений, системные операторы могут просмотреть последние изображения и полученные данные о местоположении этих элементов. Кроме того, прогнозирующие функции системы используют модели прогноза океанических течений, наблюдения транспондеров и отслеживание препятствий так, что система может сделать прогнозы на будущее, и операторы могут смоделировать возможные сценарии развития событий.
[0012] В заключение следует отметить, что раскрытая система предоставляет системным операторам релевантную информацию для определения плана действий по защите целевого судна от входящих угроз. Принятие неправильных решений может быть очень дорогостоящим и повлечь за собой различные финансовые проблемы, проблемы безопасности и проблемы для окружающей среды. Следовательно, система мониторинга имеет то преимущество, что она позволяет операторам правильно распорядиться тем, как целевое судно может быть защищено, когда ему следует завершить работу и когда его следует вывести из угрожаемого района, если уровни риска становятся слишком высокими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Фиг. 1 схематично показывает систему мониторинга и защиты от морской угрозы в соответствии с настоящим раскрытием.
[0014] Фиг. 2 схематично показывает некоторые из компонентов системы мониторинга, включая целевое судно, судно обеспечения, маяк и удаленный аппарат, наряду с различными службами, используемыми системой.
[0015] Фиг. 3A-3B показывают функции клиент-серверной архитектуры для системы мониторинга.
[0016] Фиг. 4A-4B схематично показывают общую методологию вычислений и обработки данных для системы мониторинга.
[0017] Фиг. 5 концептуально показывает компоненты системы мониторинга в примерной компоновке во время операций.
[0018] Фиг. 6 показывает процесс мониторинга угроз целевому судну в виде блок-схемы.
[0019] Фиг. 7A-7D показывают примерные экраны пользовательского интерфейса для раскрытой системы.
ПОДРОБНОЕ ОПИСАНИЕ
A. Краткий обзор системы мониторинга
[0020] Как было отмечено ранее, защита прикрепленных, фиксированных или стационарных морских структур или морских структур с запланированными перемещениями или маршрутами от морских препятствий и воздействий представляет собой существенную проблему для работ по бурению, добыче, а также для поисково-разведочных работ в некоторых морских регионах, таких как Арктика. Чтобы справиться с этой проблемой, операторы на такой структуре могут использовать систему 10 мониторинга и защиты от морской угрозы, которая схематично проиллюстрирована на Фиг. 1. Система 10 мониторинга защищает целевую морскую структуру 20, находящуюся в регионе, таком как арктический, имеющем плавучие и/или погруженные в воду объекты, которые перемещаются в океане и угрожают структуре 20.
[0021] В целом, целевая морская структура 20 может быть производственным судном, производственной платформой, буровым кораблем, устьевым отверстием скважины, стояком, судном сейсморазведки или другой морской структурой, используемой при бурении, добыче или при поисково-разведочных операциях в море. Структура 20 может быть плавучей или фиксированной, и может быть постоянно или временно прикреплена ко дну моря. Следовательно, структура может быть установлена в определенной точке (то есть, "установлена") для бурения, загрузки танкера, ремонтных работ на скважине, подводного обслуживания или других таких операций по бурению или добыче в акватории. Для поисково-разведочных работ структура 20, такая как судно сейсморазведки, может пересекать область поисково-разведочных работ по запланированному (то есть, "установленному") маршруту для сбора сейсмических данных или производства других поисково-разведочных работ. В любом случае структура 20 обычно работает в одном конкретном местоположении в течение некоторого периода времени для выполнения бурения, добычи или производства поисково-разведочных работ, что делает ее уязвимой для движущихся угроз от морских препятствий в воде. В целях описания структура 20 упоминается в настоящем документе как целевое судно, однако структура 20 может быть любой из нескольких типов структур, судов, платформ и т.п., которые известны и используются для бурения, добычи и производства поисково-разведочных работ на водных путях.
[0022] Как будет обсуждено в примерах ниже, такое целевое судно 20 может использоваться в ледовых регионах, имеющих ледниковый лед, паковый лед, льдины и другие ледяные препятствия. Однако судно 20 и элементы раскрытой системы 10 могут использоваться и в других географических положениях, имеющих мусор, растения, плавающие обломки судов, тонущий груз или другие преграды или препятствия, погруженные в воду и/или плавающие в воде, которые могут помешать бурению, добыче или производству поисково-разведочных работ судном 20. Кроме того, раскрытая система 10 может также осуществлять мониторинг морских животных, таких как стаи рыб, стада китов и т.п., так что различные меры могут быть предприняты целевым судном 20. Раскрытая система 10, как описано в примерах ниже, может использоваться для мониторинга и защиты целевого судна 20 в любой из этих ситуаций способом, аналогичным обсуждаемому ниже.
[0023] При использовании в ледовом районе, например, целевое судно 20 подвергается угрозам от движущихся морских препятствий, а именно, плавающих обломков судов, тонущего груза, мусора, айсбергов, льдин, свободного пакового льда, а также других опасностей, которые могут ударить судно 20 и вызвать структурное повреждение, превышающее допустимые для судна ограничения. Морские препятствия могут перемещаться свободно в области вокруг целевого судна 20, и погодные условия, океанические течения, высота волн, направление и скорость ветра, а также другие факторы окружающей среды могут влиять на перемещения этих угроз. Дополнительно к этому, ледовые регионы могут иметь паковый лед различной толщины и с разным количеством слоев. Части этого пакового льда могут оторваться с течением времени, плыть в океанических течениях и угрожать судну 20. Следовательно, возможность отслеживать угрозы со стороны льда и осуществлять мониторинг толщины пакового льда и его разрушения может быть выгодной для защиты целевого судна 20 в таком регионе.
[0024] Для того чтобы помочь операторам повысить уровень безопасности операций (например, бурения, добычи или поисково-разведочных работ), система 10 мониторинга отслеживает, прогнозирует и заранее принимает меры против различных угроз в ледовом регионе. Для того чтобы достигнуть этих целей, система 10 среди других функций, которые будут обсуждены более подробно позже, имеет различные суда 30 обеспечения, маяки 40 сопровождения, аппараты 50 наблюдения и аппаратуру связи (не обозначена специально).
[0025] В системе 10 оборудование на целевом судне 20 действует как центральное управление, и оно связывается непосредственно с каждым из судов 30 обеспечения и других компонентов системы 10. В свою очередь, различные суда 30 обеспечения и другие компоненты, которые должны располагаться, управляться и сопровождаться системой 10, выполняют программное обеспечение для выполнения задачи и получения данных для защиты целевого судна 20. Наконец, суда 20/30 и другие компоненты передают данные и инструкции друг другу с тем, чтобы проактивно действовать против угроз со стороны морских препятствий.
[0026] Вкратце, системные операторы управляют системой 10 на целевом судне 20 так, чтобы быть защищенными от входящих ледяных угроз. По мере выполнения операций (бурения, добычи или поисково-разведочных работ) и возникновения угроз система 10 помогает управлять операциями судов 30 обеспечения, имеющих задачу защиты целевого судна 20, и помогает отслеживать и осуществлять мониторинг ледовых угроз относительно целевого судна 20. В качестве части этого управления система 10 получает и использует информацию об образованиях льда и их расположениях от различных спутников 60, таких как метеорологические спутники, спутники наблюдения и спутники системы геопозиционирования GPS. Дополнительно к этому, система 10 может получать изображения и другую информацию, используя удаленные аппараты 50, такие как беспилотные летательные аппараты и т.п., с тем чтобы получать информацию о погоде или фотографии. Кроме того, система 10 может получать информацию от удаленных базовых станций 65, находящихся на суше, таких как метеорологические станции и т.п.
[0027] Система 10 мониторинга затем использует программное обеспечение, системы связи, спутниковые и погодные изображения и т.п., так что системные операторы могут визуализировать и управлять различными угрозами, находящимися вокруг целевого судна 20, и могут выделить и направить различные суда 30 обеспечения и другие компоненты с тем, чтобы отслеживать и работать с этими угрозами. Для того чтобы помочь в визуализации и управлении, система 10 в режиме реального времени осуществляет мониторинг океанических течений, высоты волн, погодных условий (температуры, направления и скорости ветра и т.д.), мусора и льда, находящихся в непосредственной близости от целевого судна 20, и эта информация может спрогнозировать перемещения льда и изменения в окружающей среде.
[0028] Затем, в ходе операций система 10 отслеживает риски от мусора и ледяных угроз и прогнозирует, как эти риски могут развиваться во времени. Прогноз может быть основан на информации, такой как информация об обычных направлениях и скоростях локальных океанических течений, о текущих направлениях и скоростях локальных океанических течений, где в настоящий момент расположены айсберги или плавучие льдины, какова достоверность любого прогноза и т.д. Дополнительно к этому, если целевое судно 20 используется для производства поисково-разведочных работ, таких как сейсмическая разведка, целевое судно 20 имеет запланированный маршрут или курс движения. В этом случае прогноз может быть дополнительно основан на текущей скорости движения целевого судна, направлении, маршруте, запланированном курсе и т.д.
[0029] На основе отслеженных рисков и прогнозов система 10 может затем идентифицировать и автоматически предложить различные сценарии для улучшения защиты целевого судна 20 путем указания того, могут ли препятствия быть перемещены или разрушены в подходящем временном интервале, когда следует снимать с якоря и перемещать целевое судно 20 от спрогнозированной угрозы, и т.д.
[0030] Посредством этого мониторинга, отслеживания и прогнозирования система 10 мониторинга получает и представляет системным операторам для анализа множество данных. Данные непосредственных наблюдений от датчиков и маяков 40 могут в реальном времени сообщить информацию о расположении судов 30 обеспечения, айсбергов, льдин, об океанических течениях, о скорости и направлении ветра, а также о других интересующих переменных. Датчики и маяки 40 могут быть развернуты вручную или воздушным путем, сброшены с судна 30 обеспечения, вертолета, радиоуправляемого беспилотного летательного аппарата и т.д. Используемые датчики могут включать в себя профиломеры льда, такие как смотрящие вверх сонары для обнаружения присутствия, толщины, движения и других параметров морского льда. Примеры таких устройств включают в себя сонар-профиломер льда и акустический доплеровский профиломер течений, которые развертываются в воде на глубине 25-60 м ниже поверхности. Дополнительные данные для анализа включают в себя, но не ограничиваются этим, спутниковые изображения льда, файлы формата ESRI (Environmental Systems Research Institute, Inc.), вручную определенные препятствия с присвоенными заголовками и уровнем угрозы, прогнозные модели морских течений/ледяных потоков, исторические данные океанических течений, положения судов и запретных зон, показания стандартных корабельных и ледовых радаров и алгоритмы автоматической идентификации. Для прогнозирования перемещений льда в воде система может использовать профиломеры льда, смонтированные на морском дне, которые могут измерять толщину льда (приблизительно), размер плавучей льдины, и проводить другие измерения.
[0031] Комбинируя всю эту информацию, системные операторы могут затем использовать систему 10 для того, чтобы направить суда 30 обеспечения для выполнения выбранных задач, таких как прохождение по маршруту разрушения морского препятствия, физическое отклонение морского препятствия, визуальное наблюдение за морскими препятствиями, развертывание маяков 40 дистанционного мониторинга, и т.д. В конце система 10 стремится идентифицировать риски как можно раньше, прогнозировать, куда эти риски будут перемещаться со временем, и идентифицировать защитные меры против угроз, так чтобы целевое судно 20 могло продолжать операции. Кроме того, система 10 может также идентифицировать уровень угрозы и какое количество времени может понадобиться для того, чтобы прекратить установочные операции и, возможно, переместить или эвакуировать судно 20.
[0032] Как более подробно обсуждается ниже, системные операторы используют инструмент планирования системы 10 для того, чтобы проактивно осуществлять мониторинг окружающей среды, оценивать риски и принимать необходимые решения, такие как отдание команд судам обеспечения 30 на то, чтобы перехватить морские препятствия, которые представляют угрозу, и отдание команд судам обеспечения 30 на то, чтобы выполнить разведочные и ледокольные работы на предопределенном маршруте (например, "заграждение", "беговая дорожка", эллиптического, орбитального и других типов). Как показано на Фиг. 1, например, для судна 30a обеспечения определена задача перемещаться по маршруту типа «заграждение» для того, чтобы предотвратить ледовые угрозы, разбивая лед и находясь в готовности перемещать препятствия при необходимости. Оператор может также отдавать команды судам 30 обеспечения наблюдать и помечать идентифицированные морские препятствия, которые представляют собой угрозу. Например, для другого судна 30b обеспечения на Фиг. 1 определена задача наблюдать и пометить конкретный айсберг. Рекогносцировка также может выполняться удаленными аппаратами 50, такими как беспилотные летательные аппараты, которые могут сбросить маяки 40, сделать фотографии рельефа льда, сделать погодные измерения и выполнить другие работы вокруг целевого судна 20. Эти и другие детали системы 10 обсуждаются ниже.
B. Компоненты системы мониторинга
[0033] С пониманием системы 10 мониторинга в целом обсуждение далее фокусируется на дополнительных деталях компонентов системы.
[0034] Фиг. 2 схематично показывает некоторые из компонентов системы 10 мониторинга, включая целевое судно 20, судно 30 обеспечения, маяк 40 и удаленный аппарат 50. Также на Фиг. 2 изображены различные службы 140, используемые системой 10 мониторинга. Как будет понятно, другие относящиеся к делу компоненты также могут использоваться и могут быть основаны на некоторых из тех же самых концепций, которые детализированы ниже. Кроме того, данная реализация может иметь большее или меньшее количество этих компонентов.
[0035] Целевое судно 20 имеет системы связи 22, датчики 24, серверные модули 120 и пользовательские интерфейсы 26. Во время работы системы связи 22 получают данные от различных удаленных служб 140, включая службу 142 погоды, службу 144 спутникового наблюдения, службу 146 удаленных баз и службы 148 геопозиционирования, используя спутники или другие формы связи. Служба 144 спутникового наблюдения может использовать радар с синтезированной апертурой (SAR) для картографирования и мониторинга плавающих обломков судов, тонущего груза, мусора, айсбергов, льдин и другого морского льда и может обеспечивать изображения в режиме реального времени (или по меньшей мере в режиме, близком к реальному времени) через Интернет или другие коммуникационные средства. В дополнение к этим удаленным службам 140 у целевого судна 20 могут быть свои собственные датчики 24, такие как радар, визуализация, датчики погоды и другие такие системы, которые могут также собирать локальные данные в непосредственной близости от судна 20.
[0036] Одновременно с этим операторы используют пользовательский интерфейс 26 и различные функции мониторинга и управления серверных модулей 120 для того, чтобы проанализировать и организовать собранные данные. Серверные модули 120 и пользовательский интерфейс 26 выполняются на рабочих станциях системной клиент-серверной архитектуры, которая будет описана позже. На основе анализа угроз, спрогнозированных траекторий перемещения препятствий и задач по работе с угрозами системные операторы могут затем передавать инструкции различным судам 30, маякам 40 и удаленным аппаратам 50, распределенным в области вокруг целевого судна 20. В свою очередь, эти компоненты 30, 40 и 50 могут реализовать эти инструкции, как подробно описано в настоящем документе, с тем чтобы ответить на угрозы целевому судну 20.
[0037] Со своей стороны судно 30 обеспечения имеет конфигурацию, подобную конфигурации целевого судна 20, и включает в себя системы связи 32, датчики 34 и пользовательский интерфейс 36. Вместо того, чтобы иметь серверные модули, судно 30 обеспечения имеет клиентские модули 130, которые могут работать на одной или более рабочих станциях системной клиент-серверной архитектуры вместе с серверным модулем 120 судна. (Конечно, может использоваться и обратная компоновка, в которой целевое судно 20 имеет клиентские модули 130, и по меньшей мере одно из судов 30 обеспечения имеет серверные модули 120.) Во время работы системы связи 32 судна обеспечения могут также получать данные от различных удаленных служб 140 и могут получать инструкции от целевого судна 20.
[0038] Судно 30 также имеет различные локальные датчики и системы 34 для сбора локальных данных, которые позже будут использоваться для мониторинга и анализа. Некоторые локальные системы 34 включают в себя погодные устройства, дифференциальную систему глобального позиционирования (DGPS), эхолот, акустический допплеровский профиломер течений (ADCP), автоматическую систему опознавания (AIS), радар (обычный и ледовый), сонар и другие системы.
[0039] Аналогично работе целевого судна, операторы на судне 30 обеспечения используют пользовательский интерфейс 36 и различные функции мониторинга и управления клиентских модулей 130 с тем, чтобы выполнить инструкции целевого судна. Аналогично, операторы могут использовать эти компоненты для анализа и организации собранных данных и передачи этих данных и другой информации целевому судну 20 и/или другим судам 30 обеспечения.
[0040] Маяк 40 может быть монтируемым на льду маяком для отслеживания ледяных препятствий или может быть плавучим бакеном для отслеживания океанических течений, высоты волн и погодных условий. Например, маяк 40 может быть подобен MetOcean компактному сбрасываемому с воздуха ледовому маяку (CALIB) компании MetOcean Data Systems, который является сообщающим мини-маяком. Этот тип маяка 40 может быть развернут с самолета, и информация, позволяющая отследить его положение, может регулярно загружаться с веб-сайта для использования в раскрытой системе 10.
[0041] Как в целом показано на Фиг. 2, маяк 40 имеет систему связи 42, датчики 44 и транспондер 46 системы спутникового геопозиционирования GPS, а также локальное электропитание (не показано). После развертывания транспондер 46 получает отсчеты GPS из службы 148 спутникового геопозиционирования GPS для определения координат местоположения маяка 40. Например, маяк 40, развернутый на льду, может отслеживать перемещения льда, в то время как маяк 40, развернутый в воде, например на бакене, может отслеживать океанические течения. Когда маяк 40 работает, его датчики 44 могут получать информацию о погоде, местоположении и даже сейсмическую информацию. В конце концов, собранные данные и отсчеты GPS с маяка 40 могут быть переданы системами связи 42 судам 20/30 для их использования в различных функциях мониторинга и управления системы 10.
[0042] И, наконец, удаленный аппарат 50 имеет коммуникационные системы 52 для связи по меньшей мере с судами 20/30 и службой 148 системы спутникового геопозиционирования GPS, хотя связь с другими службами 140 также может использоваться. Датчики 54 собирают данные, и клиентский модуль 130 обрабатывает операции аппарата 50. Вообще, удаленный аппарат 50 может быть беспилотным летательным аппаратом для развертывания маяков 40 или для получения изображений аэрофотосъемки, данных о погоде и т.п. в желаемых местоположениях вокруг целевого судна 20. Альтернативно, удаленный аппарат 50 может быть удаленно управляемым аппаратом или другим подводным аппаратом для измерения глубины льда в воде, измерения температуры или скорости течения воды и т.д. Поскольку он является беспилотным, удаленный аппарат 50 может дистанционно управляться с целевого судна 20 или даже с другого судна 30 и может обмениваться данными и инструкциями с судами 20/30.
C. Клиент-серверная архитектура
[0043] С пониманием системы 10 мониторинга в целом и ее компонентов обсуждение далее фокусируется на дополнительных деталях системной компьютерной архитектуры. Как упоминалось ранее, система 10 использует клиент-серверную архитектуру. Серверные модули 120 могут использоваться на целевом судне 20, а клиентские модули 130 могут использоваться на судах 30 обеспечения и на других компонентах. Альтернативно, серверные модули 120 могут использоваться на судах 30 обеспечения, а клиентские модули 130 могут использоваться на целевых судах 20 и на других компонентах. Поскольку она имеет клиент-серверную архитектуру, раскрытая система 10 может использоваться на одиночной рабочей станции на одиночном судне или может использоваться на множестве серверов, находящихся на множестве судов.
[0044] В иллюстративных целях Фиг. 3A схематично показывает клиент-серверную архитектуру 100 системы в форме блок-схемы. Вкратце, архитектура 100 имеет серверные модули 120 на целевом судне (20; Фиг. 1) или на других компонентах и имеет клиентские модули 130 по меньшей мере для двух судов обеспечения (30; Фиг. 1). Как будет понятно, система 100 может включать в себя больше целевых судов 20 и/или больше или меньше судов 30 обеспечения. Дополнительно к этому, клиентские модули 130 могут использоваться на ряде других компонентов, таких как удаленные аппараты, маяки, и т.д., как было отмечено ранее. Различные клиентские модули 130 связываются с серверным модулем 120, который работает как центральное управление системы 10. В некоторых ситуациях, однако, клиентские модули 130 могут также связываться друг с другом с тем, чтобы передавать информацию и инструкции.
[0045] Будучи клиент-серверной, архитектура 100 может иметь различные процессы, распределенные по этим модулям 120 и 130. Таким образом, клиентский модуль 130 на судне 30 обеспечения может быть своей собственной операционной системой, которая может работать независимо от серверного модуля 120. Тем не менее серверный модуль 120 может управлять всей работой и может добавлять и удалять клиентские модули 130 для судов 30 обеспечения или других компонентов из конфигурации архитектуры.
[0046] С этой целью Фиг. 3B схематично показывает различные процессы клиент-серверной архитектуры 100, которые могут быть распределены и совместно использоваться в системе 10 мониторинга и ее модулях 120 и 130. Процесс 110 сервера данных работает как центральный процесс и коммуникационный концентратор между всеми различными процессами и работает независимо от любого из клиентских процессов. Различные интерфейсные процессы 111 связываются с бортовым оборудованием судов (например, 20/30) для того, чтобы получать внешнюю информацию. Например, интерфейсный процесс 111 может получать информацию от навигационных систем (например, от спутниковой системы геопозиционирования GPS, эхолота, пассивного радиолокационного наведения PRH, гироскопа, радара и т.д.), спутниковые изображения, данные прогноза погоды и т.д. Интерфейсный процесс 111 может также выдавать данные другим системам, таким как системы управления рулем, навигационные системы, системы тревожной сигнализации и т.д.
[0047] Дисплейные процессы 112 выполнены с возможностью использования на различных дисплеях, распределенных по архитектуре системы 100. Каждый дисплей может быть сконфигурирован под требования пользователя, и различные спутниковые и другие изображения окружающей среды, показывающие ледовые образования, погоду, и другие детали могут быть выведены на экран в пользовательских интерфейсах дисплейных процессов 112, как описано ниже. Дополнительно к этому, положения судна и препятствий могут быть наложены на изображения в пользовательских интерфейсах системы, и препятствиям могут быть присвоены атрибуты для того, чтобы описать их прошлые и прогнозируемые пути перемещения, размеры, уровни угрозы и другие детали.
[0048] Вычислительные процессы 113 вычисляют положения судна, выполняют обнаружение столкновений, прогнозируют пути перемещения судов и препятствий и выполняют другие вычисления. Прогнозирование путей перемещения препятствий может помочь операторам и системе 10 оценить угрозы и риски и реализовать задачи по работе с ними. Например, посредством выполнения обнаружения столкновений между судами 20/30 и ледовыми препятствиями вычислительные процессы 113 могут генерировать аварийные сигналы, если прогнозируются потенциальные столкновения.
[0049] Конфигурационные процессы 114 позволяют операторам конфигурировать работу системы, например, определять интерфейсы данных, дисплеи, рабочие станции, суда обеспечения, журналирование положений, коммуникационные параметры и любые критерии исключения для аварийных сигналов. В дополнение к работе в связке с целевым судном 20, на каждом судне 30 обеспечения могут быть установлены системные компоненты, которые могут работать независимо от целевого судна 20. В частности, конфигурационные процессы 114 имеют инструмент планирования 118. Как обсуждается ниже со ссылками на Фиг. 7A-7D, инструмент планирования 118 является графическим приложением, которое позволяет системным операторам просматривать операции и определять план защиты для целевого судна 20.
[0050] Процессы журналирования 115 регистрируют данные для целей мониторинга. Архитектура 100 журналирует положения различных судов и ледовых препятствий с их соответствующими атрибутами с подходящими интервалами для того, чтобы создать историю активностей. Эта информация может использоваться для повторного анализа или в целях аудита и может храниться в аудиторской базе данных. Такая журналированная информация в аудиторской базе данных может отслеживать все полученные данные и различные принятые операционные решения, что может быть особенно полезным для восстановления событий, если что-то идет не так, как надо во время операций. Архитектура 100 также помечает и журналирует спутниковые файлы данных ледовой обстановки для более позднего использования. Используя всю занесенную в журнал и помеченную информацию, операторы могут создать отчеты для любого судна или ледового препятствия.
[0051] Процессы 116 контроля качества и отчетности могут генерировать отчеты и данные для обзора и анализа. Процессы 116 могут позволить операторам создавать множество графических отчетов и могут иметь диагностическое приложение (не показано), которое осуществляет мониторинг исправности системной архитектуры 100. Диагностическое приложение, например, может обеспечивать данные, относящиеся к производительности и исправности системной архитектуры 100, и может иметь отдельные процессы и интерфейсы к внешним системам. Приложение контроля качества (не показано) может позволить операторам конфигурировать множество интерактивных графиков, содержащих любые данные, журналированные в системных базах данных.
[0052] И наконец, коммуникационные процессы 117 передают данные между судами 20/30, маяками 40, аппаратами 50 и другими компонентами. Используя различные формы коммуникации, архитектура 100 автоматически обновляет удаленные блоки на судах 30 обеспечения свежей информацией. Связь может быть установлена при помощи морского спутникового терминала с очень маленькой апертурой (VSAT), через многополосные линии радиосвязи или другие линии связи.
[0053] Неблагоприятная погода часто нарушает спутниковую связь, и возможность беспроводных коммуникаций в Арктике сильно зависит от погоды. По этой причине любой из удаленных датчиков, маяков 40 и судов 20/30 может сохранять данные до тех пор, пока погодные условия не позволят их передать. Дополнительно у этих компонентов могут быть альтернативные коммуникационные возможности, такие как радио "точка-точка", так что беспилотный летательный аппарат или судно могут быть направлены в окрестность любого ключевого датчика или компонента для получения данных и передачи их обратно во время перебоев в спутниковой или беспроводной связи.
D. Методология обработки
[0054] Компоненты раскрытой системы 10 мониторинга, использующей клиент-серверную архитектуру 100, как обрисовано в общих чертах ранее, следуют общей методологии обработки, как схематично иллюстрировано на Фиг. 4A. Как показано, методология 70 обработки системы включает в себя сбор данных (блок 72), передачу (блок 74), принятие решений (блок 76) и ответ на угрозу (блок 78).
[0055] В качестве исходной точки и как показано на Фиг. 4B, клиент-серверная архитектура 100 имеет различные ресурсы и источники данных 80, которые вовлечены в сбор данных (блок 72) методологии 70 обработки системы, изображенной на Фиг. 4A. Как было отмечено ранее, некоторые из ресурсов 81 включают суда, маяки, удаленные аппараты и другие компоненты для сбора данных для клиент-серверной архитектуры 100. Спутниковые данные 82 могут приходить с метеорологических спутников, со спутников слежения за ледовой обстановкой и со спутников системы геопозиционирования GPS, а ручные данные 83 могут приходить от визуальных наблюдений, облетов и т.п. Клиент-серверная архитектура 100 может также получать локальные данные 84 на целевом судне (20; Фиг. 1) от радара, системы геопозиционирования GPS и т.п.
[0056] Наконец, целевое судно (20) имеет свои собственные электрические, сигнальные и операционные системы, и эти целевые данные 85 судна могут использоваться клиент-серверной архитектурой 100. Кроме того, любые текущие операции, выполняемые на судне (20), и структурные ограничения судна могут быть частью данных 85 судна, доступных клиент-серверной архитектуре 100. Например, целевое судно (20) может быть в состоянии выдерживать различные уровни ветра, течения и ледовой обстановки в течение определенного периода времени, но может иметь структурные ограничения, которые должны быть учтены.
[0057] В качестве другого примера данных 85 судна, текущие операции (бурение, добыча или поисково-разведочные работы), выполняемые с целевым судном (20), могут диктовать то, сколько времени необходимо для того, чтобы завершить работу судна (20) и переместить его в другое расположение, если это необходимо. Другими словами, судну (20) может понадобиться остановить бурение, вытянуть стояк или втянуть сейсморазведочные кабели, прежде чем судно (20) сможет быть перемещено или перенаправлено, и выполнение этих операций может занять определенное количество времени. Если эти операции происходят на судне (20), любой временной интервал для оценки степени риска может принимать во внимание отрезок времени, необходимый для завершения "установочных" (то есть, стационарных или запланированных) операций, для прекращения операций (например, для остановки бурения, для вытягивания стояка или для втягивания сейсморазведочных кабелей и т.д.), для перемещения судна (20), для эвакуации персонала и т.п. Любые учитываемые промежутки времени будут зависеть от типа вовлеченной структуры (то есть, судна 20), от типа "установочных" (то есть, стационарных или запланированных) выполняемых операций (например, бурение, добыча, поисково-разведочные работы и т.д.), а также от других факторов.
[0058] Для того чтобы получить и передать все эти собранные данные (блок 72), как показано на Фиг. 4A, клиент-серверная архитектура 100 использует различные формы коммуникации (блок 74). Как отмечено, различные компоненты системы 10 могут использовать любую из множества доступных форм коммуникации (блок 74) для интересующей среды. В большинстве случаев могут использоваться спутниковая или радиосвязь в зависимости от погодных условий, а также могут использоваться другие формы радиосвязи с использованием ретрансляционных станций и т.п. Как будет понятно, может использоваться много типов систем связи.
[0059] Получив собранные данные (блок 72), клиент-серверная архитектура 100 проходит через различные процессы принятия решений (блок 76) для того, чтобы выработать управляемый ответ (блок 78). Процесс принятия решений (блок 76) может использовать прогнозирующие алгоритмы, деревья решений, взвешивание рисков и другие методы и может быть выполнен посредством автоматической компьютерной обработки и человеческого вмешательства с тем, чтобы отразить угрозы целевому судну 20 со стороны льда и т.п.
[0060] В частности, архитектура 100 в процессах принятия решений и выработки ответа (блоки 76 и 78) управляет ресурсами и источниками данных 80 и сбором данных (блок 72) путем сопровождения, направления и конфигурирования судов 30, маяков 40 и т.п. с тем, чтобы собрать данные и определить угрозы. Затем клиент-серверная архитектура 100 может предоставить операторам на судах 20/30 результаты 90, такие как управление ресурсами 91, оценка степени риска 92, аварийные сигналы 93, инструкции 94 и мониторинг 95.
[0061] В управлении ресурсами 91, например, системные операторы могут управлять различными задачами и операциями судов 30, маяков 40, аппаратов 50 и других ресурсов вокруг целевого судна 20. По мере продолжения операций результаты оценки степени риска 92 могут прогнозировать угрозы, располагать по приоритетам задачи и выполнить другие оценки. Затем, в зависимости от угроз и их серьезности, могут быть инициированы аварийные сигналы 93 на основе различных временных интервалов или стадий для того, чтобы предупредить операторов об угрозах целевому судну 20.
[0062] Наконец, операторы могут передавать инструкции 94 другим компонентам системы 10, таким как суда и т.п., и могут указывать план действий и организовывать ответ на угрозы. При мониторинге 95 клиент-серверная архитектура 100 осуществляет мониторинг всей операции путем журналирования собранных данных и генерации отчетов и т.п. для дальнейшего анализа.
E. Работа системы
[0063] С пониманием компонентов системы 10, ее архитектуры 100 и различных используемых процессов, обратимся теперь к обсуждению того, как система 10 мониторинга работает для того, чтобы защитить целевое судно 20 от угроз в данном регионе. Опять же текущий пример фокусируется на угрозах, с которыми можно столкнуться в ледовых регионах, однако система 10 может быть применена к любому морскому региону, в котором можно встретиться с угрозами.
1. Работа с угрозами со стороны морских препятствий
[0064] Для того, чтобы лучше проиллюстрировать, как осуществляется мониторинг и как идентифицируются угрозы, а также как генерируются задачи и планы для работы с угрозами, обратимся к примеру, показанному на Фиг. 5, в котором компоненты системы 10 показаны концептуально наряду с некоторыми возможными графическими элементами, которые могут быть выведены на экран в пользовательских интерфейсах системы 10, например, в инструменте планирования 118, как описано в настоящем документе. Целевое судно 20 показано только с некоторыми из его компонентов, включая серверный модуль 120, систему связи 22 и инструмент планирования 118, хотя на самом деле присутствуют также и другие компоненты. В этом примере также показаны два судна 30a-b обеспечения, каждое из которых имеет клиентский модуль 130. Наконец, в этом примере также показаны различные ледяные препятствия O, включая первое препятствие O1, второе препятствие O2 и различные более мелкие препятствия O3. У одного из этих препятствий O2 имеется развернутый на нем маяк 40.
[0065] Вообще, морские препятствия O могут быть плавающими обломками судов, тонущим грузом, мусором, айсбергами, льдинами и другими плавающими угрозами целевому судну 20, переносимыми по океану и с течениями, и морские препятствия O могут быть определены в системе 10 как одиночные или многоточечные объекты. Каждое морское препятствие O в системе 10 может иметь набор связанных с ним атрибутов - некоторые из которых могут быть выведены на экран, как будет описано позже. Атрибуты могут быть получены различными способами, такими как ручной ввод координат; графическое определение информации с помощью экрана дисплея и мышки; автоматическое получение из радиолокационных целей, спутниковых изображений или от маяка 40; а также другими способами.
[0066] На целевом судне 20 и судах 30 обеспечения серверные и клиентские модули 120/130 могут использоваться для того, чтобы создавать и удалять различные морские препятствия O в непосредственной близости от целевого судна 20. Информация о препятствии предпочтительно передается автоматически между каждым из судов 20/30. Для непротиворечивости в системе 10 в целом информация о препятствии распределяется автоматически между различными судами 20/30.
[0067] Используя обмен информацией, например, информация о препятствии может быть выведена на экран на локальных пользовательских интерфейсах отдаленных судов 30 обеспечения. Эти локальные пользовательские интерфейсы очерчивают по меньшей мере все активные угрозы в локальной области. Используя клиентские модули 130, локальные операторы на судах 30 обеспечения могут создавать и удалять препятствия O в системе 10 и изменять их атрибуты. Во время осуществления мониторинга суда 30 обеспечения также могут физически помечать препятствия O одноразовыми навигационными маяками 40, используемыми для отслеживания перемещений препятствия в режиме реального времени.
[0068] Обсуждая конкретные примеры работы системы со ссылкой на Фиг. 5, обратимся также к процессу мониторинга 150, показанному на Фиг. 6. Хотя общая методология уже была обсуждена, процесс 150 для мониторинга угроз целевому судну 20 изображен на Фиг. 6 в некоторой дополнительной детализации.
[0069] В процессе мониторинга 150 системные операторы используют пользовательские интерфейсы инструмента планирования 118 раскрытой системы 10, которые позволяют системным операторам осуществлять мониторинг угроз. Первоначально системные операторы идентифицируют морские препятствия O, находящиеся в непосредственной близости от целевого судна 20 (блок 152). Как отмечалось ранее, для этого может использоваться ручное наблюдение, спутниковая визуализация, изображения льдов и т.п. Детальная информация о положении препятствия, его размере, форме, направлении движения и т.д. импортируется в инструмент планирования 118 системы, и системные операторы могут использовать инструмент планирования 118 для того, чтобы создавать и редактировать детальную информацию о препятствии. Некоторые, если не все, из этих функций могут быть автоматизированы с использованием компьютерных программ.
[0070] С течением времени инструмент планирования 118 осуществляет мониторинг положения этих идентифицированных препятствий O относительно целевого судна 20 (блок 154). Этот мониторинг дает в результате исторические пути перемещения T препятствий O, которые могут быть просмотрены системными операторами и проанализированы системой 10. Таким образом, инструмент планирования 118 может прогнозировать пути перемещения T для препятствий O на основе исторических перемещений, океанических течений, размера и положения препятствий и т.д. (блок 156). Эти прогнозирования затем определяют то, какие угрозы могут существовать для целевого судна 20 и какие возможные временные интервалы имеются в распоряжении до того, как эти угрозы могут стать неизбежными.
[0071] Системные операторы затем используют инструмент планирования 118 для того, чтобы планировать различные задачи для ответа на спрогнозированные угрозы (блок 158). Для того чтобы сделать это, системные операторы могут конфигурировать ряд задач или назначений, которые будут выполняться судами 30 обеспечения и другими компонентами. Эти различные задачи могут быть организованы в различные сценарии, в которых конкретные ресурсы (например, суда 30 обеспечения, маяки 40, удаленные аппараты 50 и т.д.) развертываются по-разному для отражения спрогнозированных угроз. Каждый сценарий по существу является прогнозной моделью, показывающей возможные перемещения и изменения угроз в окружающей среде и возможные стратегии и задачи для отражения этих угроз. Таким образом, сценарии позволяют системным операторам создавать и анализировать многократные ситуации типа «что если», используя данные наблюдений, доступные в системе 10. Каждый сценарий может иметь отличающиеся прогнозные модели и может позволять системным операторам визуализировать возможные исходы и угрозы.
[0072] Для каждого сценария раскрытая система 10 использует выбранные прогнозные модели морских препятствий для того, чтобы прогнозировать путь перемещения T для каждого препятствия O, и постоянно осуществляет проверку на возможность будущих столкновений. Целевому судну 20 также может быть назначено множество границ безопасности Z, таких как границы Z1, Z2, и Z3, изображенные на Фиг. 5. Если какое-либо из морских препятствий O вторгается в границы безопасности судна Z, система 10 выдает аварийный сигнал, который может быть выведен на экран и занесен в журнал. Эта информация позволяет системным операторам выбирать оптимальный план действий по защите целевого судна 20.
[0073] Когда системные операторы удовлетворены прогнозными моделями сценария и списками задач судов, системные операторы затем выбирают сценарий и публикуют его в системе 10 (блок 160). Это делает сценарий активным и распространяет его по различным судам 30 обеспечения и другим системным компонентам. После этого могут быть сгенерированы графические отчеты, карты, экраны пользовательских интерфейсов и т.д., которые описывают сценарий, задачи судов, перемещения ледяных препятствий и т.п.
[0074] Когда суда 30 обеспечения получают новый активный сценарий, например, операторы судна могут использовать инструмент планирования 118 системы, работая на судовых модулях 130, для того, чтобы идентифицировать задачи, подлежащие выполнению. Различные задачи могут быть перечислены как запланированные вместе и могут указывать предложенные маршруты движения, ожидаемое время прибытия и продолжительности задач. По мере того, как задачи выполняются, операторы судна могут обновлять статус каждой задачи в плане задач путем указания такого статуса, как «принята», «отклонена», «активна», «завершена» и «отменена» (блок 162). Для непротиворечивости обновления статусов задач затем могут быть автоматически сохранены и распространены по другим частям системы 10 так, чтобы все операторы точно знали состояние плана сценария.
[0075] С пониманием процесса мониторинга, изображенного на Фиг. 6, вернемся теперь к Фиг. 5 для того, чтобы обсудить некоторые конкретные примеры работы системы со ссылкой на примерную компоновку показанных компонентов. Как было отмечено ранее, различные препятствия O, суда 30 обеспечения и т.п. окружают целевое судно 20, и система 10 может хранить конкретные детали для этих компонентов. Системные операторы на целевом судне 20 и судах 30 обеспечения могут изучать и обновлять эти детали в любое время.
[0076] Во время выполнения операций, например, система 10 отслеживает фактическое перемещение льда и строит исторические пути перемещения Т0. Как только ледяное препятствие создано, например, система 10 записывает историю предыдущих положений, которая обновляется с течением времени и может быть записана. В свою очередь, записанные данные могут использоваться для того, чтобы уточнить модель отслеживания и другие функции системы 10.
[0077] Система 10 также отслеживает ледяные препятствия O, помеченные позиционными маяками 40, такие как ледяное препятствие О2, показанное с маяком 40. Как было отмечено ранее, маяк 40 передает обновления положения препятствия, которые могут быть получены любым судном 20/30. Эти обновления положения передаются обратно целевому судну 20 для постоянного журналирования и обеспечивают историческую информацию для отслеживания препятствия О2. Таким образом, положения препятствия обновляются автоматически по мере того, как новые файлы положения транспондера загружаются и импортируются, так что наблюдаемый путь перемещения T постоянно достраивается в базе данных раскрытой системы.
[0078] В дополнение к отслеживанию ледяных препятствий O система 10 может отслеживать пути P судов 30 обеспечения, показывающие, где были суда 30. Кроме того, система 10 может определять пути диверсий, выполнение которых ожидается от судов 30 для того, чтобы обработать ледяные препятствия O. Это позволяет операторам планировать полное покрытие и указывает, не были ли какие-либо препятствия O пропущены или оценены неадекватно.
[0079] Как упоминалось выше, система 10 может также прогнозировать будущие перемещения льда на основе доступной информации, включая исторические пути перемещения, океанические течения, направления ветра, данные прогноза погоды, информацию непосредственного отслеживания с удаленных маяков и т.п. Для того чтобы прогнозировать будущие пути перемещения ледяных препятствий, инструмент планирования 118 позволяет операторам помечать любое количество ледяных препятствий O. Затем система и операторы могут автоматически или вручную обновить или переместить препятствия O по мере того, как импортируются и визуализируются новые спутниковые изображения.
[0080] Инструмент планирования 118 раскрытой системы может затем предложить несколько прогнозных моделей для ледяных препятствий O. Например, ручная прогнозная модель ледяного препятствия может предложить фиксированную процедуру. В этой модели система может просто назначать скорости и заголовки препятствиям О. Системные операторы могут либо оставить скорость и заголовок по умолчанию, либо обновить эти детали по мере необходимости. В качестве части такого ручного отслеживания, оператор может использовать возможности визуализации пользовательского интерфейса системы для того, чтобы вручную проложить прогнозные направления D и скорости S на основе полученных в результате наблюдений перемещений препятствий, а также изображений льда за период времени. В одном примере первое препятствие O1 имеет всего одну скорость S и одно направление D, присвоенные ему, и эти детали могут идентифицировать по меньшей мере краткосрочное перемещение ледяного препятствия O1. Эта информация может затем использоваться для того, чтобы прогнозировать движение вперед препятствия O1 из его последнего записанного положения.
[0081] В противоположность ручному прогнозу система 10 может также выполнять автоматический прогноз ледяного препятствия. Используя исторические пути перемещения, обсужденные выше, раскрытая система 10 использует полученные в результате наблюдения пути перемещения ледяных препятствий и прогнозирует будущие пути перемещения и скорости. Забегая вперед, обновленная информация об океанических течениях, направлениях ветра и т.д. может быть дополнительно использована для того, чтобы уточнить спрогнозированные пути перемещения и скорости.
[0082] Например, скорость S и исторический путь перемещения Т0 ледяного препятствия O2 может использоваться для того, чтобы сгенерировать прогнозный путь перемещения T, который может иметь диапазон вероятности (то есть, от T+ до T-). Это может быть полезно при прогнозировании перемещений больших площадей льда в течение нескольких дней и недель, так что системные операторы могут визуализировать ледяные угрозы и их прогнозируемые пути перемещения.
[0083] Основываясь на спрогнозированных путях перемещения каждого препятствия O, система 10 определяет, какое из препятствий O представляет будущую угрозу целевому судну 20. Система 10 затем выдает аварийные сигналы, идентифицирующие различные уровни угрозы. Основываясь на аварийных сигналах, операторы на целевом судне 20 и/или судах 30 обеспечения могут разрабатывать лучший план защиты.
[0084] Например, препятствия O могут иметь уровни угрозы, основанные на спрогнозированных путях перемещения T и другой информации о препятствиях O. Различные уровни угрозы могут быть установлены в зависимости от реализации и желаемого объема определения. Например, "незначительный" уровень угрозы может использоваться для препятствий O, представляющих низкую операционную угрозу. Это может иметь место для небольших препятствий O3, которые являются слишком маленькими, чтобы подвергнуть опасности целевое судно 20 и его операции или приближение которых к судну 20 не ожидается. При таком незначительном уровне угрозы препятствия O3 потенциально могут быть обработаны судами 30 обеспечения, либо путем их разбивания, либо путем отклонения их курса (то есть посредством их буксировки буксиром или сетью либо путем подталкивания их водяной струей и т.п.). Однако, если препятствие O3 оставлено в покое и остается на этом уровне, препятствие O3, возможно, не представляет операционной угрозы для целевого судна 20.
[0085] В другом примере "средний" уровень угрозы может определять препятствия, которые представляют собой операционный риск для целевого судна 20, но могут быть обработаны судами 30 обеспечения и/или целевым судном 20. Например, первое препятствие O1 может иметь средний уровень угрозы, потому что его спрогнозированный путь перемещения Т1, размер, текущая скорость и т.д. могут быть обработаны локальным судном 30A.
[0086] Наконец, «главный» уровень угрозы может определять препятствия, которые представляют операционный риск для целевого судна 20 и не могут быть обработаны судами 30 обеспечения и/или целевым судном 20. Например, ледяное препятствие O2 может иметь разрушительный путь перемещения T2 и может быть слишком большим или слишком быстрым для того, чтобы отклонить его локальным судном 30B.
[0087] Для того чтобы помочь определить угрозы, система 10 может использовать множество границ безопасности (например, Z1-3), определенных в среде вокруг целевого судна 20. Эти границы Z могут визуально указывать угрозы в зонах по отношению к целевому судну 20 и могут предупреждать операторов, когда ледяное препятствие O может войти в пределы границы Z. Каждая граница Z может быть связана с необходимыми мерами безопасности, такими как прекращение бурения, снятие с якоря и т.п., так, чтобы операции могли быть прекращены вовремя в соответствии с конкретной угрозой.
2. Пользовательский интерфейс
[0088] Как было отмечено ранее, система 10 мониторинга использует ряд пользовательских интерфейсов для дисплеев на судах 20/30. Вообще, эти пользовательские интерфейсы могут показывать спутниковые данные о ледовой обстановке, ледяные препятствия, радиолокационные цели, маяки, суда и другие элементы системы 10 мониторинга. Атрибуты различных элементов также могут быть просмотрены, а также могут конфигурироваться множественные дисплеи.
[0089] Некоторые примеры экранов 200A-D пользовательского интерфейса для раскрытой системы 10 описаны ниже со ссылками на Фиг. 7A-7D. Эти экраны 200A-D пользовательского интерфейса могут быть частью инструментов планирования (118; Фиг. 3B и Фиг. 5), работающих на архитектуре системы 10 на судах 20/30, так что операторы могут просматривать информацию, конфигурировать систему 10, отслеживать угрозы и осуществлять их мониторинг, а также планировать задачи и другие активности в ответ на угрозы.
[0090] Каждый из экранов 200A-D, изображенных на Фиг. 7A-7D, может иметь основную область просмотра 210, ряд доков и вспомогательные или всплывающие окна, некоторые из которых будут описаны ниже. Как было отмечено ранее, системные операторы используют эти различные экраны 200A-D пользовательского интерфейса, а также другие, не детализированные в настоящем документе, для того, чтобы визуализировать окружающую среду. Соответственно, основная область просмотра 210 обычно показывает данные 212 изображения интересующей области вокруг или около целевого судна 20. Эти данные 212 изображения могут быть сгенерированной компьютером картой, спутниковым изображением, изображением льда или их комбинацией, а информация для данных 212 изображения может быть импортирована из файлов, загруженных с внешних источников (например, 140; Фиг. 2).
[0091] В примерном экране 200A пользовательского интерфейса, изображенном на Фиг. 7A, например, основная область просмотра 210 имеет карту 212 области вокруг целевого судна (20), которое показано как значок на карте 212. Со своей стороны, карта 212 интересующей области может быть обновлена, ее масштаб может быть увеличен или уменьшен, и над ней могут осуществляться другие манипуляции системными пользователями. Конечно, область просмотра 210 экранов 200A-D пользовательского интерфейса может иметь более одного пространственного дисплея, и дополнительные области дисплея могут быть вручную добавлены и затем зафиксированы. Кроме того, каждый дисплей может конфигурироваться индивидуально. Например, одна область дисплея может показывать спутниковые изображения ледовой обстановки, в то время как другая может показывать последнее изображение с ледового радиолокатора.
[0092] Изображения для области просмотра 210 могут быть обеспечены офисным персоналом, поставщиками удаленных услуг и т.п., так что могут использоваться различные формы электронной доставки, включая электронную почту, загрузку файлов с ftp-сервера, интернет-канал, линии спутниковой связи и т.д. Дополнительно, для отображения и анализа может использоваться множество форматов изображения. Например, форматы изображений ледовой обстановки, такие как спутниковые растровые изображения Geotiff и ледовые карты формата ESRI (Environmental Systems Research Institute, Inc.), могут быть импортированы и использованы. В дополнение к этим форматам изображений ледовой обстановки система 10 может импортировать файлы изображений в формате базы данных бесшовных изображений с мультиразрешением (MrSID, Multiresolution Seamless Image Database). Этот формат файла (расширение файла.sid), разработанный и запатентованный компанией LizardTech, используется для кодирования растровой графики с географической привязкой, такой как ортофотопланы.
[0093] Необработанные данные изображения могут быть включены в пользовательские интерфейсы, дисплеи и другие компоненты системы 10 для использования операторами на судах 20/30. Кроме того, программное обеспечение может выполнять распознавание формы ледовых образований и координировать распознанные образования на карту и интересующие местоположения. В свою очередь, эта обработанная информация может быть сделана доступной для различных пользовательских интерфейсов и дисплейных модулей на судах 20/30, позволяя операторам визуализировать ледовые образования относительно других компонентов системы 10. Дополнительные детали элементов пользовательского интерфейса будут описаны позже.
[0094] В другом примере необработанные данные о ледовой обстановке могут прибыть в стандартном формате географического файла, таком как формат GIS, обеспечивающий визуальную информацию о ледовых образованиях наряду с информацией о местонахождении. Некоторая информация о ледовой обстановке может включать в себя указания концентраций льда и другие полезные детали. Однако независимо от формата файла эти данные о ледовых образованиях могут быть собраны из множества источников и могут обновляться с регулярными интервалами.
[0095] После импорта изображения сохраняются в памяти (то есть на локальном диске и/или удаленном сервере) и регистрируются в системе 10 для будущего использования в пользовательском интерфейсе, например в экранах 200A-D. Например, файлы изображений можно архивировать по типу и индексировать по дате и времени для будущего использования в пользовательском интерфейсе в экранах 200A-D и в других функциях раскрытой системы 10. Целевое судно 20 может распределять загруженные файлы изображений различным судам 30 обеспечения.
[0096] Системные операторы затем могут принять решение наложить эту информацию на любое отображение другой информации в пользовательских интерфейсах и дисплеях. Другими словами, операторы могут наложить информацию о ледовых образованиях на различные экраны, меню и карты. На экране 200A, например, различные представления могут быть выбраны в окне 230 для того, чтобы показать или наложить различные компоненты или функции в этой основной области просмотра 210.
[0097] Некоторые общие опции, доступные для просмотра, включают в себя спутниковые изображения, погодные изображения, изображения ледовой обстановки, расположение судов, расположение маяков, зоны риска и т.п. Таким образом, поверх любой из сцен окружающей среды экран 200A может показывать выбранные графические детали, такие как расположение судов 20 и 30, запретные зоны, определенные препятствия (текущее положение и исторический путь перемещения айсбергов и плавучих льдин), паковый лед и другие элементы, как обсуждено в настоящем документе. Информация о погоде, такая как температуры, скорость и направление ветра, области высокого и низкого давления, океанические течения и т.п., также может быть графически выведена на экран или обозначена. Таким образом, системные операторы имеют в своем распоряжении набор параметров экрана для конфигурирования того, как данные и изображения формируют слои многослойного изображения и отображаются в основной области просмотра 210.
[0098] Например, основная область просмотра 210 на Фиг. 7 показывает изображение ледовой обстановки, а также относительные расположения различных судов 20/30 и маяков 40 системы 10. Паковый лед 214 показан относительно суши 216, а также паковый лед 214 показан графически с концентрацией информации о льде при помощи цветового кодирования и т.п. Суда 20/30 графически показаны относительно пакового льда 216, так же как и различные маяки 40. Вся эта информация вводится в систему вручную и/или автоматически, основываясь на координатах спутниковой системы геопозиционирования GPS и на других собранных данных, как это раскрыто в настоящем документе.
[0099] Как далее показано в примере, изображенном на Фиг. 7A, атрибуты, связанные с элементом в основной области просмотра 210, могут быть выведены на экран в док-области 220, во всплывающем окне 232 или на дополнительных экранах (не показаны). Например, док-область 220 показывает цветовую кодировку и соответствующие концентрации льда, используемые в основной области просмотра 210.
[00100] Ключ (легенда) 222 показывает графические символы для различных системных компонентов, и атрибуты льда могут быть выведены на экран в док-области 224 атрибутов. Здесь атрибуты льда могут быть основаны на морской символике льда от Всемирной Метеорологической Организации (WMO), которая обычно упоминается как «код яйца» (Egg Code) и показывает общую концентрацию, частичную концентрацию, стадии развития и преобладающую форму льда.
[00101] Когда системный пользователь взаимодействует с элементами экрана, различные всплывающие окна 232 и т.п. могут вывести на экран дополнительную информацию. Например, если указатель мыши прошел над судном 30 в основной области просмотра 210, появившееся всплывающее окно 232 показывает информацию об этом судне 30, такую как идентификационные данные, положение, заголовок, скорость и т.д.
[00102] В примерном экране 200B пользовательского интерфейса, изображенном на Фиг. 7B, основная область просмотра 210 снова показывает изображение 212 ледовой обстановки, которое было загружено и импортировано в систему 10. Дополнительно, представления 230 из другой системы визуализации окружающей среды могут быть выбраны для показа в качестве различных слоев на карте отображаемой области. Суда 20/30, маяки 40 и другие системные компоненты также показаны в привязке к изображению 212 ледовой обстановки. Одно судно V3 показано вместе со всплывающим окном, которое указывает его атрибуты, такие как позиция, заголовок, скорость и текущая задача. К более тонким деталям показанных системных элементов можно получить доступ с помощью пользовательского интерфейса, используя дополнительные экраны, так что информация может быть добавлена, обновлена, и обработана по мере необходимости.
[00103] Как было отмечено ранее, данные от маяков 40 могут быть импортированы из файлов транспондера GPS, и файлы прогноза морского течения также могут быть загружены, импортированы и индексированы таким же образом. Эта информация может затем использоваться в экране 200B пользовательского интерфейса. В частности, системные операторы могут визуализировать и оценить ледовые угрозы на экране 200B пользовательского интерфейса. Как только ледовая угроза идентифицирована, оператор на целевом судне или судах обеспечения 20/30 может определить недавно идентифицированное ледяное препятствие, как подлежащее мониторингу.
[00104] Например, четыре ледяных препятствия A-D, находящиеся в непосредственной близости от целевого судна 20, имеют маяки 40, и их исторические пути перемещения и спрогнозированные пути перемещения могут отслеживаться и выводиться на экран. Препятствие А также имеет всплывающее окно, показывающее его атрибуты, такие как позиция, заголовок, скорость, размер и текущий уровень угрозы. Опять же, к более тонким деталям препятствий можно получить доступ с помощью пользовательского интерфейса, используя дополнительные экраны, так что информация может быть добавлена, обновлена, и обработана по мере необходимости.
[00105] В качестве части спрогнозированного пути перемещения препятствий система 10 может получить доступ к прогнозным моделям, как обсуждалось ранее, для океанических и ветровых течений, и может использовать их для прогнозирования путей перемещения препятствий. Полученные океанические и ветровые течения также могут быть выведены на экран в основной области просмотра 210, которая показывает течения C в непосредственной близости от целевого судна 20.
[00106] Наконец, как далее показано на Фиг. 7B, целевое судно 20 может иметь свой собственный запланированный маршрут R, например, если судно 20 передвигается в воде с установочной операцией, такой как проведение морской сейсморазведки. Информация о запланированном маршруте R судна может использоваться системой 10 при оценке прогнозных моделей, как обсуждалось ранее для спрогнозированных путей перемещения препятствий и их угроз судну 20. Дополнительная информация о судне 20 и его маршруте R также может использоваться в прогнозных моделях, включая, но не ограничиваясь этим, текущую скорость целевого судна, текущее направление, будущие расположения, текущий этап операции (то есть, развернуты ли кабели морской сейсморазведки или нет) и т.д.
[00107] К сожалению, как только положение препятствия определено, оно неизбежно изменяется, поскольку морской лед продолжает перемещаться. Кроме того, не всегда возможно пометить каждую ледовую угрозу маяком 40 и наблюдать положение по мере его автоматического обновления. Тем не менее оператор все равно может захотеть идентифицировать ледяное препятствие на дисплее и отслеживать его перемещение. Для того чтобы сделать это, оператор может вручную обновить положение любого определенного препятствия в любое время, или система 10 может использовать методы распознавания формы для объектов в данных изображения и автоматически обновлять их положение.
[00108] Одно такое выделенное препятствие без маяка 40 является препятствием E на Фиг. 7B. Поскольку положения журналируются в базе данных раскрытой системы вручную по результатам наблюдений или с помощью распознавания формы изображений льда, перемещение этого выделенного препятствия E может затем отслеживаться визуально и вычисляться относительно целевого судна 20.
[00109] Фиг. 7C показывает другой пример экрана 200C пользовательского интерфейса для инструмента планирования (118) системы. В дополнение к уже описанным функциям, экран 200C показывает спрогнозированные пути или запрограммированные пути перемещения ледяных препятствий O, судов 30 и т.п., а также показывает назначения различных системных ресурсов. Как отмечалось ранее, системные операторы могут назначить задачи судам 30 обеспечения, и суда 30 обеспечения могут сами назначить задачи для себя. Задачи включают в себя осуществление мониторинга конкретных ледяных препятствий или принятие мер для того, чтобы отклонить обозначенное ледяное препятствие с его пути перемещения. Системные операторы могут использовать экран 200C инструмента планирования (118) для того, чтобы определить рекомендуемый курс для судна 30, обеспечивающий выполнение конкретной задачи.
[00110] В экране 200C пользовательского интерфейса системы, например, оператор может назначить конкретные задачи 240 любому из различных судов 30 обеспечения. Задачи включают в себя инструкции физически наблюдать ледяное препятствие, активно отклонить конкретные ледяные препятствия на другой курс, выполнять разведывательное и заградительное маневрирование и т.д. Используя комбинацию доступных данных и прогнозов, оператор может затем принять решение, какие именно задачи следует выполнить, если это необходимо. Задачи 240 обычно назначаются судам 30 обеспечения и включают в себя разведку льда, определение ледовых целей, мониторинг этих целей и их помечание. Для ледовой разведки судну 30 обеспечения может быть назначена общая разведывательная роль. Задача может быть сформулирована для определенной области или определенного маршрута судна, либо она может быть просто оставлена на усмотрение капитана судна обеспечения.
[00111] Для определения ледовых целей судну 30 обеспечения производится назначение найти, разрушить или отклонить конкретное ледяное препятствие O или область льда. Для мониторинга ледовых целей судну 30 обеспечения производится назначение осуществлять мониторинг конкретного ледяного препятствия так, чтобы информация могла быть введена в систему 10. Для маркирования ледовых целей судну 30 обеспечения производится назначение пометить конкретное ледяное препятствие маяком 40 с транспондером GPS.
[00112] Раскрытая система 10 может автоматически вычислить для судна маршрут T, необходимый для выполнения задачи, начинающийся с текущего положения судна или с конца предыдущей задачи. Раскрытая система 10 также вычисляет предполагаемое время, необходимое для перемещения между задачами.
[00113] Задачи 240 для судов 30 обеспечения появляются на экранах 200C пользовательского интерфейса раскрытой системы, таким образом пользователи сразу могут видеть расписание задач 240, предполагаемые сроки выполнения задач и предполагаемые продолжительности задач для судов 30 обеспечения. Другой способ представления задач показан на экране 200D пользовательского интерфейса, изображенном на Фиг. 7D, который имеет календарный дисплей 250. Посредством перемещения ползунков времени в календарном дисплее 250 планы могут быть показаны в основной области просмотра 210 со спрогнозированными путями перемещения идентифицированных ледяных препятствий и всеми запланированными маршрутами судов по ходу выполнения их задач 240. Используя календарный дисплей 250, оператор может скоординировать и запланировать задачи судна 240 самым эффективным и самым безопасным способом.
[00114] Для того чтобы построить календарный дисплей 250, журналируемые данные (положения судов, положения препятствий или транспондеров, файлы изображений льда и т.д.) помечаются метками времени, так что информация может быть выведена на экран пространственно в зависимости от времени. Календарный дисплей 250 также позволяет оператору определять календарные события, такие как доступность судна 30 обеспечения; запланированное время простоя; запланированный импорт изображений льда, файлов транспондера GPS или других файлов; и идентификация угроз со стороны новых препятствий.
[00115] Путем выбора плана и перетаскивания указателем мыши ползунка плана на календарном дисплее 250, например, оператор может анимировать другие дисплеи, такие как основная область просмотра 210, с течением времени. Такое перемещение по времени позволяет оператору визуализировать, как лед перемещается с течением времени, и наблюдать тренды и потенциальные угрозы целевому судну 20. Оператор может также видеть запланированное судно 30 и спрогнозированные перемещения льда и препятствия для того, чтобы оценить, как будет работать план, чтобы уменьшить угрозы целевому судну (20).
[00116] Хотя только некоторые экраны пользовательского интерфейса для системы 10 показаны на Фиг. 7A-7D, будет понятно, что пользовательский интерфейс и различные модули системы 10 могут использовать множество экранов для ввода, модификации и отображения информации. Например, может быть предусмотрен экран пользовательского интерфейса, который позволяет операторам передавать и транслировать инструкции между судами, решать деловые вопросы, изменять или конфигурировать систему и т.п.
[00117] Способы настоящего раскрытия могут быть реализованы в цифровых электронных схемах или в компьютерном оборудовании, встроенном микропрограммном обеспечении, программном обеспечении, или в их комбинациях. Устройство для осуществления раскрытых способов может быть реализовано в компьютерном программном продукте, материально воплощенном в машиночитаемом запоминающем устройстве для исполнения программируемым процессором; и стадии раскрытых способов могут быть выполнены программируемым процессором, исполняющим программу, состоящую из инструкций, с тем, чтобы выполнить функции раскрытых способов посредством оперирования входными данными и генерации вывода. Подходящие процессоры включают в себя, в качестве примера, микропроцессоры как общего, так и специального назначения. Обычно процессор получает инструкции и данные из постоянной памяти и/или оперативной памяти, включая магнитные диски, такие как внутренние жесткие диски и съемные диски; магнитооптические диски; и оптические диски. Запоминающие устройства, подходящие для материального воплощения инструкций компьютерной программы и данных, включают в себя все формы энергонезависимой памяти, включая в качестве примера устройства полупроводниковой памяти, такие как EPROM, EEPROM и устройства флэш-памяти; магнитные диски, такие как внутренние жесткие диски и съемные диски; магнитооптические диски; и диски CD-ROM. Любое из предшествующего может быть дополнено посредством, либо включено в состав специализированных интегральных схем (ASIC).
[00118] Предшествующее описание предпочтительных и других вариантов осуществления не предназначено для того, чтобы установить пределы или ограничить контекст или применимость концепций изобретения, задуманных заявителями. Как было обсуждено ранее, раскрытая система и способы могут использоваться в ледовых регионах, имеющих ледниковый лед, паковый лед, льдины и другие ледяные препятствия. Однако раскрытая система и способы могут также использоваться в других местоположениях, имеющих мусор, растения, плавающие обломки судов, тонущий груз, морских животных, или другие преграды, или погруженные в воду и/или плавающие в воде препятствия, которые могут помешать бурению, добыче или производству поисково-разведочных работ. Следовательно, описание настоящего раскрытия не ограничено использованием только в ледовых регионах. В обмен на раскрытие концепций изобретения, содержащееся в настоящем документе, заявители желают получить все патентные права в соответствии с приложенной формулой изобретения. Следовательно, предполагается, что прилагаемая формула изобретения включает в себя все модификации и изменения в полной мере, как если бы они входили в область охвата прилагаемой формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КООРДИНАЦИИ И ПЛАНИРОВАНИЯ ОДНОВРЕМЕННЫХ РАБОТ | 2015 |
|
RU2668835C2 |
| СРАВНИТЕЛЬНЫЙ АНАЛИЗ НА МОДЕЛИ ДРЕЙФА И БУКСИРОВКИ ЛЬДА ДЛЯ ЦЕЛЕВОГО МОРСКОГО СООРУЖЕНИЯ | 2015 |
|
RU2678526C2 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ЛЕДОВОЙ ОБСТАНОВКИ И ПРЕДОТВРАЩЕНИЯ ВОЗДЕЙСТВИЯ ЛЕДОВЫХ ОБРАЗОВАНИЙ НА МОРСКИЕ ОБЪЕКТЫ ХОЗЯЙСТВЕННОЙ ДЕЯТЕЛЬНОСТИ | 2014 |
|
RU2583234C1 |
| СПОСОБ РАЗВЕДКИ ЛЕДОВОЙ ОБСТАНОВКИ НА СЕВЕРНОМ МОРСКОМ ПУТИ | 2018 |
|
RU2694085C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
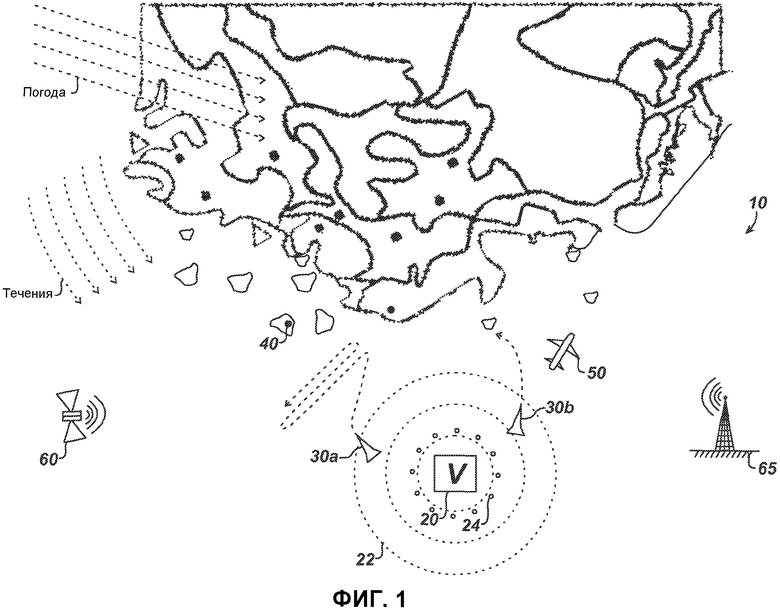
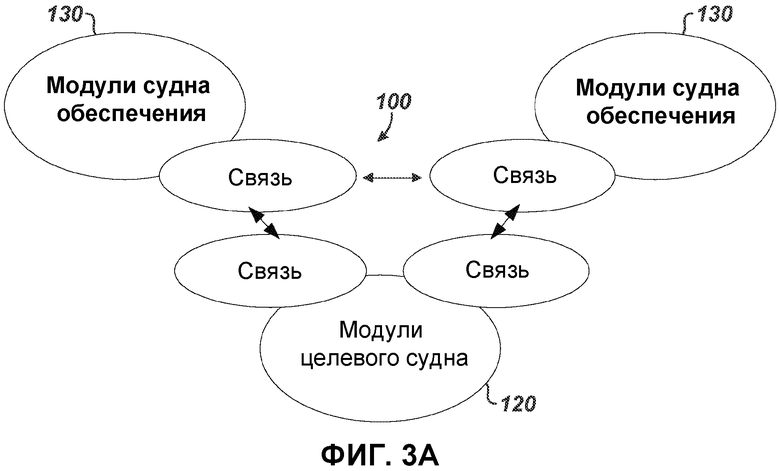
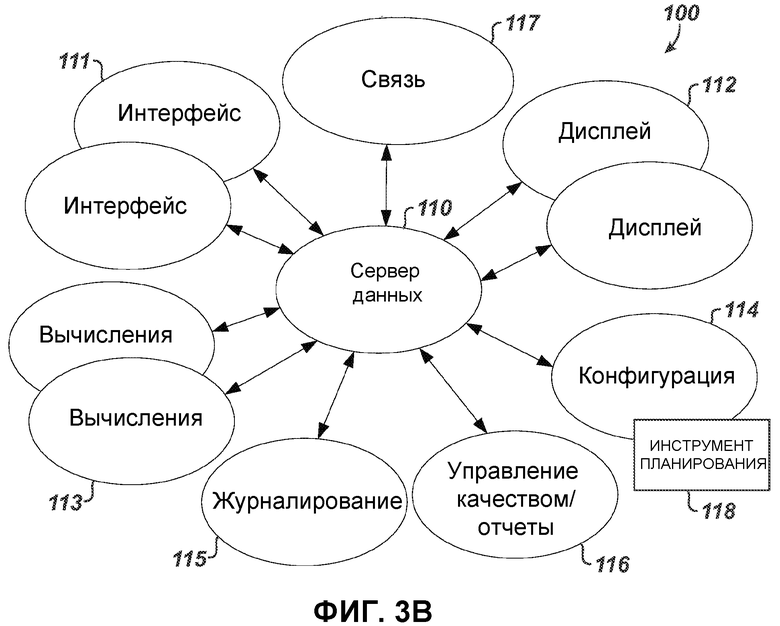





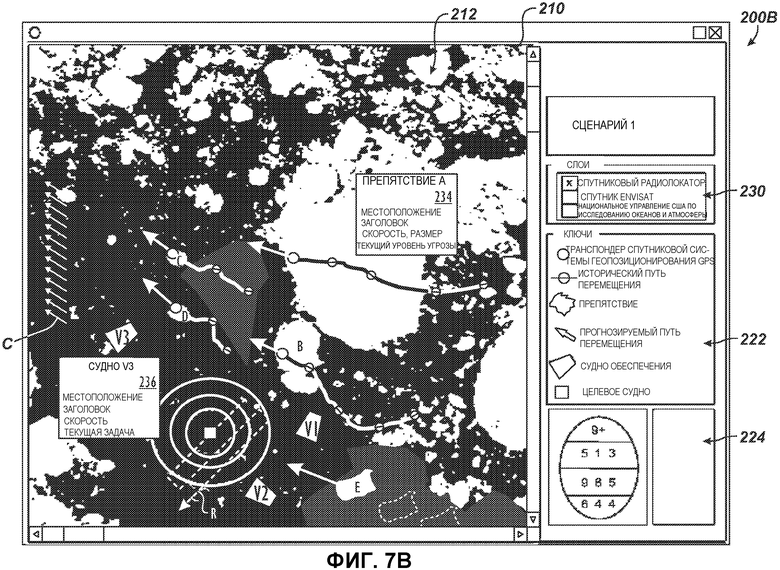
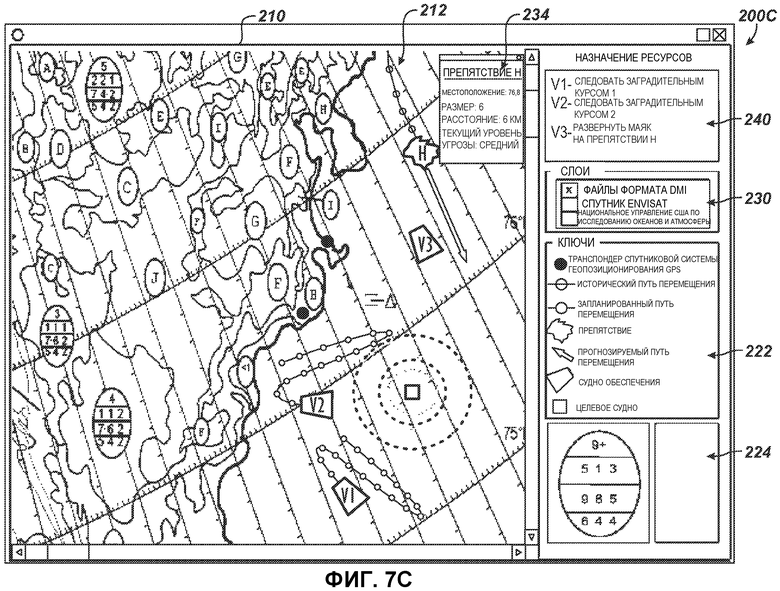
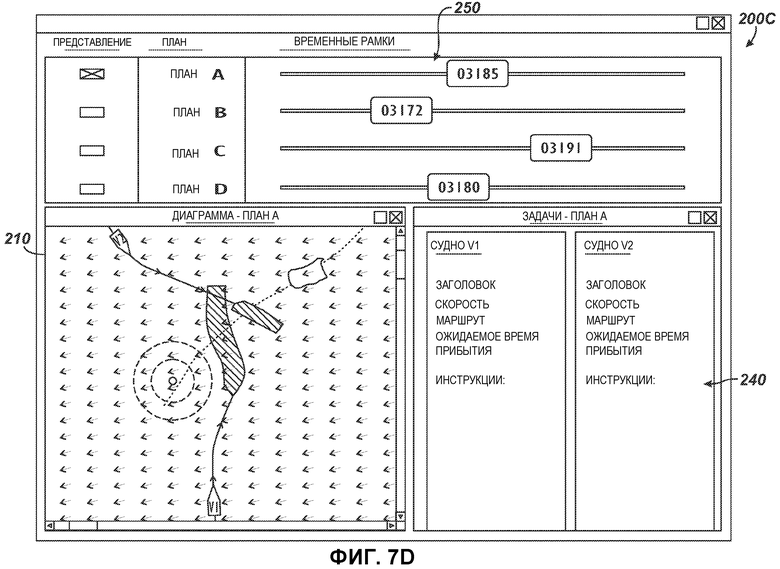
Изобретение относится к системе и способу мониторинга и защиты от морской угрозы, защищают целевое судно в ледовых или других морских регионах. Технический результат заключается в повышении безопасности на пути следования судна. Система использует средства связи, пользовательские интерфейсы и источники данных для того, чтобы идентифицировать морские препятствия (например, айсберги, льдины, паковый лед, и т.д.), находящиеся в непосредственной близости от целевого судна, выполняющего установочные операции (например, установленная стационарно структура, выполняющая бурение или операции по добыче, либо судно сейсморазведки, выполняющее поисково-разведочные работы с запланированным маршрутом). Система осуществляет мониторинг местоположения этих идентифицированных морских препятствий в течение времени относительно целевого судна и прогнозирует любые потенциальные угрозы. Когда угроза спрогнозирована, система планирует развертывание судов обеспечения, маяков и т.п. для того, чтобы ответить на угрозу. Например, система может направить судно обеспечения для того, чтобы отклонить курс или разрушить лед, угрожающий целевому судну. 3 н. и 18 з.п. ф-лы, 12 ил.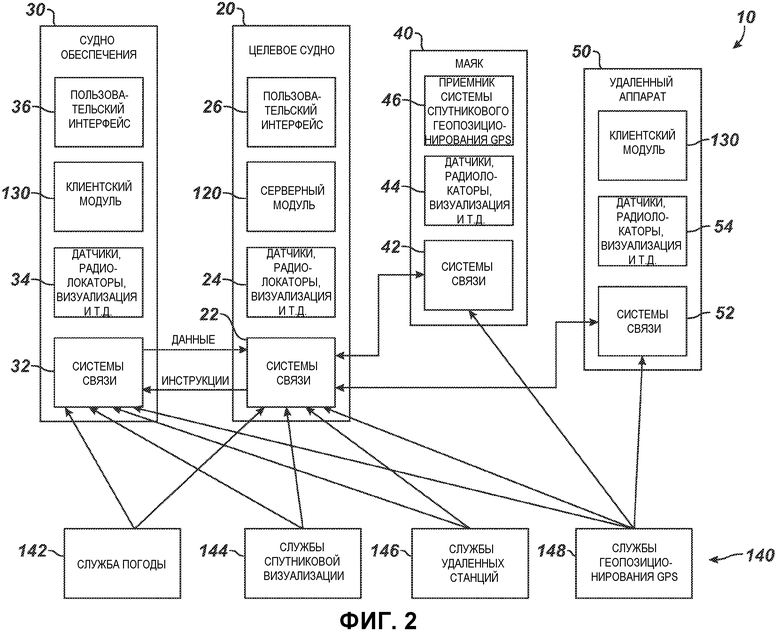
1. Способ мониторинга морской угрозы для целевой морской структуры, включающий в себя:
идентифицирование с помощью компьютерной системы одного или более морских препятствий в непосредственной близости от целевой морской структуры, осуществляющей установочные операции в акватории;
мониторинг с помощью компьютерной системы местоположений одного или более идентифицированных морских препятствий в течение времени относительно целевой морской структуры;
прогнозирование с помощью компьютерной системы угрозы целевой морской структуре на основе отслеженного местоположения одного или более идентифицированных морских препятствий; и
планирование с помощью компьютерной системы ответа на спрогнозированную угрозу целевой морской структуре со стороны одного или более идентифицированных морских препятствий.
2. Способ по п.1, в котором морские препятствия включают в себя айсберг, льдину, паковый лед, мусор, растения, плавающие обломки судов, тонущий груз, плавучие препятствия, погруженные в воду препятствия, морских животных, косяки рыб, стада китов или комбинацию перечисленного; и в котором целевая морская структура выбрана из группы, состоящей из буровой структуры, бурового корабля, производственной структуры, производственного судна, производственной платформы, устьевого отверстия скважины, стояка, поисково-разведочной структуры, судна сейсморазведки.
3. Способ по п.1, в котором идентифицирование с помощью компьютерной системы одного или более морских препятствий в непосредственной близости от целевой морской структуры включает в себя получение информации о местоположении от одного или более маяков, развернутых на одном или более морских препятствий.
4. Способ по п.3, в котором мониторинг с помощью компьютерной системы местоположений одного или более идентифицированных морских препятствий в течение времени относительно целевой морской структуры включает в себя определение местоположения одного или более морских препятствий с использованием информации о местоположении одного или более развернутых маяков в течение времени.
5. Способ по п.1, в котором идентифицирование с помощью компьютерной системы одного или более морских препятствий в непосредственной близости от целевой морской структуры включает в себя определение одного или более морских препятствий по данным визуализации в непосредственной близости от целевой морской структуры.
6. Способ по п.5, в котором мониторинг с помощью компьютерной системы местоположений одного или более идентифицированных морских препятствий в течение времени относительно целевой морской структуры включает в себя определение перемещения одного или более морских препятствий по данным визуализации в течение времени.
7. Способ по п.6, в котором идентифицирование с помощью компьютерной системы одного или более морских препятствий в непосредственной близости от целевой морской структуры включает в себя ручной ввод данных наблюдения одного или более морских препятствий.
8. Способ по п.1, в котором прогнозирование с помощью компьютерной системы угрозы целевой морской структуре на основе отслеженного местоположения одного или более идентифицированных морских препятствий включает в себя определение будущего пути перемещения одного или более морских препятствий, представляющих угрозу для целевой морской структуры.
9. Способ по п.1, в котором прогнозирование с помощью компьютерной системы угрозы целевой морской структуре на основе отслеженного местоположения одного или более идентифицированных морских препятствий включает в себя определение атрибута одного или более угрожающих морских препятствий и сравнение определенного атрибута со структурным ограничением целевой морской структуры.
10. Способ по п.9, в котором атрибут выбран из группы, состоящей из размера, расстояния, скорости, формы, глубины, пути перемещения и уровня угрозы.
11. Способ по п.9, в котором структурное ограничение целевой морской структуры включает в себя порог воздействия, которое может выдержать целевая морская структура от одного или более морских препятствий, временной интервал, необходимый для прекращения установочных операций целевой морской структуры; или временной интервал, необходимый для перемещения целевой морской структуры от угрозы со стороны одного или более морских препятствий.
12. Способ по п.1, в котором планирование с помощью компьютерной системы ответа на спрогнозированную угрозу включает в себя планирование развертывания по меньшей мере одного ресурса в ответ на спрогнозированную угрозу.
13. Способ по п.12, в котором планирование развертывания по меньшей мере одного ресурса включает в себя отклонение одного или более угрожающих морских препятствий путем направления одного или более судов к одному или более угрожающим морским препятствиям.
14. Способ по п.13, в котором отклонение одного или более угрожающих морских препятствий включает в себя разрушение или перемещение одного или более морских препятствий одним или более судами.
15. Способ по п.12, в котором планирование развертывания по меньшей мере одного ресурса включает в себя отслеживание местоположений одного или более судов относительно одного или более морских препятствий и целевой морской структуры.
16. Способ по п.12, в котором по меньшей мере один ресурс выбран из группы, состоящей из судна обеспечения, маяка слежения, самолета и аппарата с дистанционным управлением.
17. Способ по п.1, в котором планирование с помощью компьютерной системы ответа на спрогнозированную угрозу включает в себя генерирование задачи для наблюдения, отклонения или помечания одного или более морских препятствий.
18. Способ по п.17, в котором генерирование задачи для наблюдения, отклонения или помечания одного или более морских препятствий включает в себя отправку по меньшей мере одному ресурсу инструкции выполнить сгенерированную задачу.
19. Способ по п.1, в котором планирование с помощью компьютерной системы ответа на спрогнозированную угрозу включает в себя определение временного интервала, необходимого для завершения установочных операций и перемещения целевой морской структуры от спрогнозированной угрозы.
20. Программируемое запоминающее устройство, содержащее сохраненные на нем программные инструкции для побуждения программируемого управляющего устройства к выполнению способа мониторинга морской угрозы для целевой морской структуры по п.1.
21. Система мониторинга морской угрозы для целевой морской структуры, включающая в себя:
связное оборудование, получающее информацию об одном или более морских препятствиях, находящихся в непосредственной близости от целевой морской структуры;
память, хранящую полученную информацию; и
один или более серверов, оперативно связанных со связным оборудованием и памятью, причем один или более серверов выполнены с возможностью:
идентифицировать одно или более морских препятствий во время выполнения целевой морской структурой установочных операций в акватории,
осуществлять мониторинг местоположения одного или более идентифицированных морских препятствий в течение времени относительно целевой морской структуры,
прогнозировать угрозу целевой морской структуре на основе отслеженного местоположения одного или более идентифицированных морских препятствий, и
планировать ответ на спрогнозированную угрозу.
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО | 2006 |
|
RU2413958C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

